A COLREGs-Based Dynamic Navigation Safety Domain for Unmanned Surface Vehicles: A Case Study of Dolphin-I



Abstract
1. Introduction
2. Models
2.1. Basic Navigation Safety Domain
2.2. Model Validation
3. Extraction of the Essential Factors of Navigation Safety
3.1. Factors Affecting the Size of the Navigation Safety Domain
3.2. Factor Importance
3.3. Condition Attribute Set Reduction
4. Construction of the Dynamic Navigation Safety Domain
4.1. Numbers of Obstacles
4.2. Wave
4.3. Instantaneous Speed
4.4. Current
4.5. Wind
5. Case Studies and Discussion
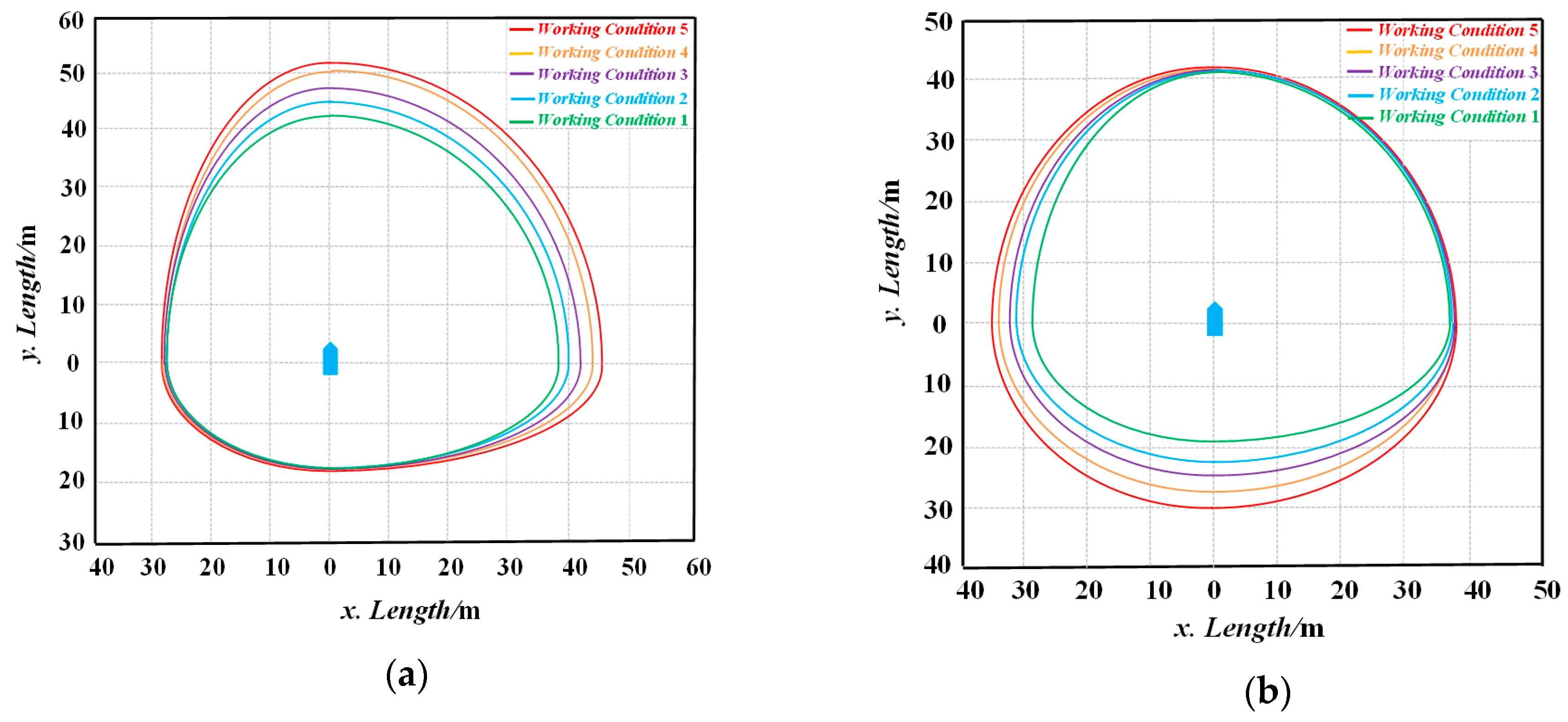
5.1. Simulation of DNSD in Various Working Conditions
5.2. Comparison Between the DNSD and Other Ship Domains
6. Conclusions
- (1)
- The DNSD can delimit the safety space to be maintained in voyage according to the geometric properties, advance distance and tactical diameter of the USVs, and it can effectively distinguish different encounter situations.
- (2)
- Under various working conditions, the DNSD can adjust the spatial scale in the corresponding bearing in allusion to the change of factors, rather than expanding the scale range in all directions.
- (3)
- Compared with the Fujii model and the Coldwell model, it is found that the ship domains of the manned ship pays more attention to the rear ship; the safety space left in the port and starboard side is obviously insufficient for USVs. The DNSD can provide a larger safety area for the USVs’ action of collision avoidance.
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| AIS | Automatic Identification System |
| AD | Advance Distance |
| ARPA | Automatic Radar Plotting Aids |
| BNSD | Basic Navigation Safety Domain |
| COLREGs | International Regulations for Preventing Collisions at Sea |
| DCPA | Distance to Closest Point of Approach |
| DNSD | Dynamic Navigation Safety Domain |
| DT | Tactical Diameter |
| GPS | Global Satellite Positioning System |
| NSD | Navigation Safety Domain |
| QSD | Quaternion Ship Domain |
| USVs | Unmanned Surface Vehicles |
References
- Liu, Z.; Zhang, Y.; Yu, X.; Yuan, C. Unmanned surface vehicles: An overview of developments and challenges. Annu. Rev. Control. 2016, 41, 71–93. [Google Scholar] [CrossRef]
- Thompson, F.; Guihen, D. Review of mission planning for autonomous marine vehicle fleets. J. Field Robot. 2018, 36, 333–354. [Google Scholar] [CrossRef]
- Zereik, E.; Bibuli, M.; Mišković, N.; Ridao, P.; Pascoal, A.M. Challenges and future trends in marine robotics. Annu. Rev. Control. 2018, 46, 350–368. [Google Scholar] [CrossRef]
- Wang, H.; Guo, F.; Yao, H.; He, S.; Xu, X.; Wang, F.H.; Guo, S.F.; Yao, T.H.; He, F.S.; Xu, F.X. Collision Avoidance Planning Method of USV Based on Improved Ant Colony Optimization Algorithm. IEEE Access 2019, 7, 52964–52975. [Google Scholar] [CrossRef]
- Zhang, J.; Zhang, D.; Yan, X.; Haugen, S.; Soares, C.G. A distributed anti-collision decision support formulation in multi-ship encounter situations under COLREGs. Ocean Eng. 2015, 105, 336–348. [Google Scholar] [CrossRef]
- Wang, Y.; Yu, X.; Liang, X.; Li, B. A COLREGs-based obstacle avoidance approach for unmanned surface vehicles. Ocean Eng. 2018, 169, 110–124. [Google Scholar] [CrossRef]
- Zhang, L.; Liu, Z.; Papavassiliou, C.; Liu, S. Formation path control method for group coordination based on fuzzy logic control method. Clust. Comput. 2017, 21, 855–868. [Google Scholar] [CrossRef]
- Singh, Y.; Sharma, S.; Sutton, R.; Hatton, D.; Khan, A. A constrained A* approach towards optimal path planning for an unmanned surface vehicle in a maritime environment containing dynamic obstacles and ocean currents. Ocean Eng. 2018, 169, 187–201. [Google Scholar] [CrossRef]
- Deng, Y.; Zhang, X.; Im, N.; Zhang, G.; Zhang, Q. Model-Based Event-Triggered Tracking Control of Underactuated Surface Vessels With Minimum Learning Parameters. IEEE Trans. Neural Netw. Learn. Syst. 2019, 1–14. [Google Scholar] [CrossRef]
- Zhao, H.; Zhang, X.; Han, X. Nonlinear control algorithms for efficiency-improved course keeping of large tankers under heavy sea state conditions. Ocean Eng. 2019, 189, 1–7. [Google Scholar] [CrossRef]
- IMO. Convention on the International Regulations for Preventing Collisions at Sea. 1972. Available online: http://www.imo.org/en/About/Conventions/ListOfConventions/Pages/COLREG.aspx (accessed on 7 January 2020).
- Kuwata, Y.; Wolf, M.T.; Zarzhitsky, D.; Huntsberger, T.L. Safe Maritime Autonomous Navigation With COLREGS, Using Velocity Obstacles. IEEE J. Ocean. Eng. 2013, 39, 110–119. [Google Scholar] [CrossRef]
- Fujii, Y.; Tanaka, K. Traffic Capacity. J. Navig. 1971, 24, 543–552. [Google Scholar] [CrossRef]
- Song, L.; Su, B.Y.; Dong, C.Z.; Shen, D.W.; Xiang, E.Z.; Mao, F.P. A two-level dynamic obstacle avoidance algorithm for unmanned surface vehicles. Ocean Eng. 2018, 170, 351–360. [Google Scholar] [CrossRef]
- Szlapczynski, R.; Szłapczyńska, J. Review of ship safety domains: Models and applications. Ocean Eng. 2017, 145, 277–289. [Google Scholar] [CrossRef]
- Goodwin, E.M. A Statistical Study of Ship Domains. J. Navig. 1975, 28, 328–344. [Google Scholar] [CrossRef]
- Davis, P.V.; Dove, M.J.; Stockel, C.T. A Computer Simulation of Marine Traffic Using Domains and Arenas. J. Navig. 1980, 33, 215–222. [Google Scholar] [CrossRef]
- Davis, P.V.; Dove, M.J.; Stockel, C.T. A Computer Simulation of Multi-Ship Encounters. J. Navig. 1982, 35, 347–352. [Google Scholar] [CrossRef]
- Coldwell, T.G. Marine Traffic Behaviour in Restricted Waters. J. Navig. 1983, 36, 430–444. [Google Scholar] [CrossRef]
- Kijima, K.; Furukawa, Y. Automatic collision avoidance system using the concept of blocking area. IFAC Proc. Vol. 2003, 36, 223–228. [Google Scholar] [CrossRef]
- Wang, N. An Intelligent Spatial Collision Risk Based on the Quaternion Ship Domain. J. Navig. 2010, 63, 733–749. [Google Scholar] [CrossRef]
- Wang, N. A Novel Analytical Framework for Dynamic Quaternion Ship Domains. J. Navig. 2012, 66, 265–281. [Google Scholar] [CrossRef]
- Dinh, G.H.; Im, N. The combination of analytical and statistical method to define polygonal ship domain and reflect human experiences in estimating dangerous area. Int. J. E-Navig. Marit. Econ. 2016, 4, 97–108. [Google Scholar] [CrossRef]
- Goerlandt, F.; Montewka, J.; Zhang, W.; Kujala, P. An analysis of ship escort and convoy operations in ice conditions. Saf. Sci. 2017, 95, 198–209. [Google Scholar] [CrossRef]
- Zhou, D.; Zheng, Z. Dynamic Fuzzy Ship Domain Considering the Factors of Own Ship and Other Ships. J. Navig. 2018, 72, 467–482. [Google Scholar] [CrossRef]
- Zhang, L.; Meng, Q. Probabilistic ship domain with applications to ship collision risk assessment. Ocean Eng. 2019, 186, 106130. [Google Scholar] [CrossRef]
- Szlapczynski, R.; Szłapczyńska, J. A Target Information Display for Visualising Collision Avoidance Manoeuvres in Various Visibility Conditions. J. Navig. 2015, 68, 1041–1055. [Google Scholar] [CrossRef]
- Szlapczynski, R.; Krata, P.; Szłapczyńska, J. Ship domain applied to determining distances for collision avoidance manoeuvres in give-way situations. Ocean Eng. 2018, 165, 43–54. [Google Scholar] [CrossRef]
- Rawson, A.; Rogers, E.; Foster, D.; Phillips, D. Practical Application of Domain Analysis: Port of London Case Study. J. Navig. 2013, 67, 193–209. [Google Scholar] [CrossRef]
- Liu, J.; Zhou, F.; Li, Z.; Wang, M.; Liu, R.W. Dynamic Ship Domain Models for Capacity Analysis of Restricted Water Channels. J. Navig. 2015, 69, 481–503. [Google Scholar] [CrossRef]
- Bakdi, A.; Glad, I.K.; Vanem, E.; Engelhardtsen, Ø. AIS-Based Multiple Vessel Collision and Grounding Risk Identification based on Adaptive Safety Domain. J. Mar. Sci. Eng. 2019, 8, 5. [Google Scholar] [CrossRef]
- Szlapczynski, R.; Szłapczyńska, J. An analysis of domain-based ship collision risk parameters. Ocean Eng. 2016, 126, 47–56. [Google Scholar] [CrossRef]
- Szlapczynski, R.; Niksa-Rynkiewicz, T. A Framework of A Ship Domain-Based Near-Miss Detection Method Using Mamdani Neuro-Fuzzy Classification. Pol. Marit. Res. 2018, 25, 14–21. [Google Scholar] [CrossRef]
- Tam, C.; Bucknall, R.; Greig, A. Review of Collision Avoidance and Path Planning Methods for Ships in Close Range Encounters. J. Navig. 2009, 62, 455–476. [Google Scholar] [CrossRef]
- Li, J.; Wang, H.; Zhao, W.; Xue, Y. Ship’s Trajectory Planning Based on Improved Multiobjective Algorithm for Collision Avoidance. J. Adv. Transp. 2019, 2019, 1–12. [Google Scholar] [CrossRef]
- Liu, X.; Li, Y.; Zhang, J.; Zheng, J.; Yang, C. Self-Adaptive Dynamic Obstacle Avoidance and Path Planning for USV Under Complex Maritime Environment. IEEE Access 2019, 7, 114945–114954. [Google Scholar] [CrossRef]
- Sun, X.; Wang, G.; Fan, Y.; Mu, D.; Qiu, B. Collision Avoidance of Podded Propulsion Unmanned Surface Vehicle With COLREGs Compliance and Its Modeling and Identification. IEEE Access 2018, 6, 55473–55491. [Google Scholar] [CrossRef]
- Lyu, H.; Yin, Y. COLREGS-Constrained Real-time Path Planning for Autonomous Ships Using Modified Artificial Potential Fields. J. Navig. 2018, 72, 588–608. [Google Scholar] [CrossRef]
- Wang, N.; Meng, X.; Xu, Q.; Wang, Z. A Unified Analytical Framework for Ship Domains. J. Navig. 2009, 62, 643–655. [Google Scholar] [CrossRef]
- Pawlak, Z. Rough sets. Int. J. Parallel Program. 1982, 11, 341–356. [Google Scholar] [CrossRef]
- Yang, L.; Zhang, X.; Xu, W.; Sang, B. Multi-granulation Rough Sets and Uncertainty Measurement for Multi-source Fuzzy Information System. Int. J. Fuzzy Syst. 2019, 21, 1919–1937. [Google Scholar] [CrossRef]
- Yeung, D.; Chen, D.; Tsang, E.; Lee, J.; Xizhao, W. On the generalization of fuzzy rough sets. IEEE Trans. Fuzzy Syst. 2005, 13, 343–361. [Google Scholar] [CrossRef]
- Zhao, Y.; Li, W.; Shi, P. A real-time collision avoidance learning system for Unmanned Surface Vessels. Neurocomputing 2016, 182, 255–266. [Google Scholar] [CrossRef]
- Zhou, X.; Huang, J.-J.; Wang, F.-W.; Wu, Z.-L.; Liu, Z.-J. A Study of the Application Barriers to the Use of Autonomous Ships Posed by the Good Seamanship Requirement of COLREGs. J. Navig. 2019, 72, 1–16. [Google Scholar] [CrossRef]
- Li, B.; Pang, F.-W. An approach of vessel collision risk assessment based on the D–S evidence theory. Ocean Eng. 2013, 74, 16–21. [Google Scholar] [CrossRef]
- Mousazadeh, H.; Jafarbiglu, H.; Abdolmaleki, H.; Omrani, E.; Monhaseri, F.; Abdollahzadeh, M.-R.; Mohammadi-Aghdam, A.; Kiapei, A.; Salmani-Zakaria, Y.; Makhsoos, A. Developing a navigation, guidance and obstacle avoidance algorithm for an Unmanned Surface Vehicle (USV) by algorithms fusion. Ocean Eng. 2018, 159, 56–65. [Google Scholar] [CrossRef]
- Mitsuyasu, H.; Tasai, F.; Suhara, T.; Mizuno, S.; Ohkusu, M.; Honda, T.; Rikiishi, K. Observation of the Power Spectrum of Ocean Waves Using a Cloverleaf Buoy. J. Phys. Oceanogr. 1980, 10, 286–296. [Google Scholar] [CrossRef]
- Gorman, R. Estimation of directional spectra from wave buoys for model validation. Procedia IUTAM 2018, 26, 81–91. [Google Scholar] [CrossRef]
- Jia, C.Y. Ship domain in congested water area. J. Dalian Marit Univ. 1989, 15, 15–19. [Google Scholar] [CrossRef]
- Hong, B.G. Ship Maneuvering, 1st ed.; Dalian Maritime University Press: Dalian, China, 2008; pp. 84–99. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Index | Parameters |
|---|---|
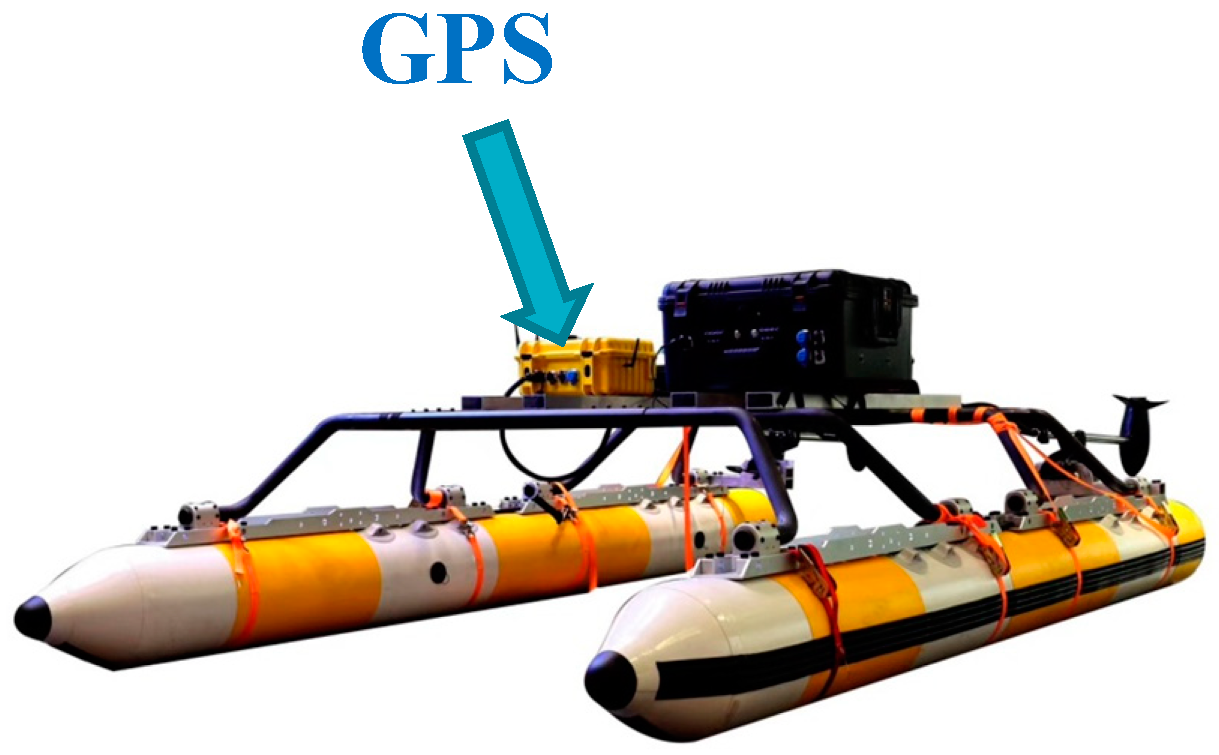
| Name | Dolphin-I |
| Type | Surface Catamaran |
| Length (m) | 3.2 |
| Breadth (m) | 2.2 |
| Weight (kg) | 75.0 |
| Draft (m) | 0.3–0.5 |
| Driving Mode | Electric Drive |
| Velocity (kn) | 5.0 |
| Advance (m) | 16.5 |
| Diameter Tactical (m) | 25.5 |
| Factors | Subset | Symbol |
|---|---|---|
| NF | Instantaneous Speed | K1 |
| Navigation Load | K2 | |
| TF | Numbers of Obstacles | K3 |
| DCPA | K4 | |
| EF | Wind | K5 |
| Wave | K6 | |
| Current | K7 | |
| Depth | K8 | |
| Visibility | K9 |
| Serial Number | K1 | K2 | K3 | K4 | K5 | K6 | K7 | K8 | K9 | Navigation Safety Level |
|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 1 | 2 | 2 | 1 | 2 | 2 | 3 | 2 |
| 2 | 3 | 2 | 3 | 3 | 2 | 4 | 1 | 2 | 3 | 4 |
| 3 | 2 | 1 | 4 | 2 | 1 | 2 | 1 | 3 | 1 | 4 |
| 4 | 2 | 3 | 1 | 2 | 3 | 2 | 2 | 1 | 2 | 2 |
| 5 | 2 | 2 | 1 | 2 | 3 | 2 | 1 | 1 | 2 | 1 |
| 6 | 1 | 2 | 3 | 1 | 3 | 4 | 2 | 2 | 3 | 4 |
| 7 | 3 | 2 | 5 | 2 | 1 | 2 | 1 | 1 | 1 | 5 |
| 8 | 2 | 3 | 1 | 3 | 2 | 1 | 1 | 3 | 2 | 2 |
| 9 | 3 | 2 | 3 | 1 | 4 | 2 | 1 | 5 | 1 | 4 |
| 10 | 3 | 1 | 2 | 1 | 3 | 1 | 2 | 2 | 3 | 3 |
| 11 | 2 | 3 | 2 | 1 | 4 | 2 | 2 | 3 | 5 | 3 |
| 12 | 4 | 1 | 2 | 1 | 2 | 3 | 2 | 2 | 3 | 3 |
| 13 | 2 | 1 | 1 | 3 | 2 | 2 | 3 | 2 | 2 | 2 |
| 14 | 1 | 2 | 3 | 1 | 2 | 1 | 4 | 1 | 3 | 4 |
| 15 | 3 | 1 | 4 | 2 | 1 | 1 | 3 | 3 | 1 | 4 |
| 16 | 3 | 1 | 1 | 3 | 3 | 2 | 2 | 1 | 2 | 2 |
| 17 | 4 | 4 | 3 | 1 | 2 | 2 | 1 | 3 | 2 | 3 |
| 18 | 3 | 3 | 1 | 4 | 1 | 1 | 3 | 3 | 4 | 3 |
| 19 | 2 | 3 | 3 | 5 | 2 | 4 | 2 | 2 | 3 | 5 |
| 20 | 2 | 4 | 1 | 3 | 3 | 1 | 3 | 3 | 2 | 3 |
| Working Conditions | K3 | K6/m | K1/m·s−1 | K7/m | K5/m |
|---|---|---|---|---|---|
| θ = 30° θ = 240° | φ = 210° φ = 60° | --- --- | δ = 60° δ = 210° | α = 240° α = 30° | |
| 1 | nθ = 2 | ∆h(t) = 0.3 | Vs = 1 | Sc = 1 | Sw = 2 |
| 2 | nθ = 4 | ∆h(t) = 0.6 | Vs = 2 | Sc = 2 | Sw = 4 |
| 3 | nθ = 6 | ∆h(t) = 0.9 | Vs = 3 | Sc = 4 | Sw = 6 |
| 4 | nθ = 8 | ∆h(t) = 1.2 | Vs = 4 | Sc = 8 | Sw = 8 |
| 5 | nθ = 10 | ∆h(t) = 1.5 | Vs = 5 | Sc = 10 | Sw = 10 |
| Size | Rfore/m | Raft/m | Rstarb/m | Rport/m |
|---|---|---|---|---|
| Min | 17.8 | 17.8 | 5.6 | 5.6 |
| Ave | 21.3 | 21.3 | 9.8 | 9.8 |
| Max | 24.9 | 24.9 | 13.9 | 13.9 |
| Encounter Situations | Rfore/m | Raft/m | Rstarb/m | Rport/m |
|---|---|---|---|---|
| Head-on | 19.5 | 19.5 | 10.4 | 5.6 |
| Overtaking | 19.2 | 19.2 | 9.7 | 9.7 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, J.; Wang, C.; Zhang, A. A COLREGs-Based Dynamic Navigation Safety Domain for Unmanned Surface Vehicles: A Case Study of Dolphin-I. J. Mar. Sci. Eng. 2020, 8, 264. https://doi.org/10.3390/jmse8040264
Zhou J, Wang C, Zhang A. A COLREGs-Based Dynamic Navigation Safety Domain for Unmanned Surface Vehicles: A Case Study of Dolphin-I. Journal of Marine Science and Engineering. 2020; 8(4):264. https://doi.org/10.3390/jmse8040264
Chicago/Turabian StyleZhou, Jian, Chenxu Wang, and Anmin Zhang. 2020. "A COLREGs-Based Dynamic Navigation Safety Domain for Unmanned Surface Vehicles: A Case Study of Dolphin-I" Journal of Marine Science and Engineering 8, no. 4: 264. https://doi.org/10.3390/jmse8040264
APA StyleZhou, J., Wang, C., & Zhang, A. (2020). A COLREGs-Based Dynamic Navigation Safety Domain for Unmanned Surface Vehicles: A Case Study of Dolphin-I. Journal of Marine Science and Engineering, 8(4), 264. https://doi.org/10.3390/jmse8040264