1. Introduction
The Internet of Things (IoT) seeks to connect all aspects of our world through a unified infrastructure, enabling us to control and monitor their status anytime. IoT research has made great progress in the commercial and industrial fields [
1,
2,
3], enhancing the potential for its application in underwater environments. Consequently, research on the Internet of Underwater Things (IoUT) is increasingly capturing the interest of researchers [
4,
5].
IoUT technology plays a crucial role in military defense, smart coasts and oceans, underwater detection, disaster prediction, and other civilian and military fields [
6,
7,
8]. The most important branch of IoUT research is underwater acoustic sensor networks (UASNs). The construction of UASNs for data collection has gradually become an effective ocean exploration method [
9]. In terrestrial sensor networks, electromagnetic waves are undoubtedly an efficient medium for wireless transmission. However, in underwater environments, electromagnetic waves suffer from severe attenuation, which makes long-distance propagation challenging. In addition, although light waves can propagate underwater, they are significantly affected by scattering and absorption, resulting in very short transmission distances. Therefore, acoustic waves hold distinct advantages in underwater communication as they can penetrate water layers and transmit over longer distances.
However, there are also many drawbacks, such as high transmission losses, multipath effects, limited bandwidth, long delays, and Doppler propagation, which pose huge challenges in conducting relevant research [
10]. In addition, underwater nodes are affected by movement caused by water currents and tides, causing the network topology to change continuously, which complicates network management and communication. The accurate locations of underwater nodes are particularly difficult to obtain since Global Positioning System (GPS) signals cannot propagate underwater. Additionally, since underwater nodes are typically battery-powered, managing energy consumption effectively to prolong the network lifetime is a key challenge. These problems make it impossible to apply terrestrial wireless sensor network technology directly to an underwater environment, so it is urgent to design an energy-efficient, scalable, and adaptive underwater acoustic routing protocol.
To address these challenges, various routing protocols have been proposed for UASNs. The main objective of the first category of routing protocols is to improve the energy efficiency of sensor nodes, which in turn helps to prolong the lifespan of the entire network. In [
11], the authors applied an offline centralized algorithm to transform the energy consumption balance challenge into an optimal data distribution problem. A flaw in the study is that the forwarding node is frequently selected. In [
12], the authors used machine learning technology, Q-learning (QL), to solve the problem mentioned above. The selection of the forwarding node is determined by its remaining energy and the group energy of its neighboring nodes. The phenomenon of routing voids in the protocol is also avoided. In addition, ref. [
13] proposed a new baseline lightweight energy-aware opportunistic routing (EnOR) protocol. EnOR employs timer-based coordination to set candidate forwarding priorities, enabling efficient time slot assignment. The way the protocol calculates the priority is just a simple algebraic operation. However, the input parameters, such as the residual energy, are often uncertain and fuzzy, which cannot be described and dealt with by a pure algebraic operation.
Another branch called cluster-based routing protocols was first proposed in [
14], in which whether a node is selected as a cluster head (CH) node is determined by the number of CHs required and how many times the node has been CH before. Compared to [
14], ref. [
15] provided a more detailed method for selecting the CH node with minimal energy consumption and data traffic load. Additionally, the forwarding node can dynamically adjust its transmission power and prevent repeated selection of the same CH node. Ref. [
16] reduced the impact of acoustic interference on data transmission by limiting the Time Division Multiple Access (TDMA) scheduling of parallel data transmission and establishes an efficient and reliable intra-cluster hierarchical route for data transmission.
However, these protocols typically focus on balancing energy consumption, which may result in a low packet transmission success rate. In addition, additional network coordination may be required, such as frequent node selection or CH election. These processes can bring additional latency, which affects the need for real-time data transmission.
The second category of the routing protocol prioritizes the reliability of data transmission. In [
17], the protocol uses the Dijkstra algorithm to select forwarding nodes with the least neighbors to avoid collision. In [
18], the directional flooding-based routing (DFR) protocol relies on packet flooding technology to improve reliability, controlling the number of nodes that flood packets and determining the number of nodes that forward them based on link quality. However, when the DFR protocol is running, the network configuration parameters are fixed, which makes it unable to deal with system changes. Consequently, the intelligent directional flooding routing (iDFR) protocol was introduced in [
19], along with two new DFR versions to dynamically reflect the quality of service (QoS). The flooding area can be dynamically adjusted according to the QoS feedback provided by the sink in these protocols.
These protocols prioritize the integrity of data transmission and often do not adequately consider the balance of energy consumption. For example, the DFR protocol ensures the reliability of data transmission by increasing the number of nodes participating in forwarding. However, this method increases energy consumption, particularly in densely networked scenarios. This flooding strategy may cause excessive redundant data transmissions.
The first branch of the last type of routing protocol is the depth-based routing protocol, which requires only depth information. Ref. [
20] introduced a depth-based routing (DBR) protocol, where the most suitable forwarding node is selected based on the maximum depth difference. Building on the work in [
20], ref. [
21] introduced a more lightweight depth-based routing protocol (LDBR) that considers node energy. When a node has a shallower depth and higher energy, it is more likely to participate in the routing process. In [
22], the authors proposed the reliable and stability-aware routing (RSAR) protocol, aimed at reducing packet loss and improving energy efficiency. The RSAR protocol introduces a novel approach by categorizing the network into five energy levels from top to bottom, selecting the optimal forwarding node based on depth information, residual energy, and energy level. Furthermore, ref. [
23] introduced a parameter called the depth threshold into the routing process and increases the consideration of the number of transmission hops, thereby ensuring the successful transmission of packets.
Another branch is the location-based routing protocol. In [
24], a vector-based forwarding (VBF) routing protocol was proposed, where packets are forwarded through the constructed virtual pipeline. However, the constant radius of the pipeline greatly impacts the performance of VBF. On the other hand, VBF cannot cope with the routing void phenomenon effectively. To increase the robustness and scalability of the previous protocol, the authors in [
25] proposed the hop-by-hop VBF (HH-VBF) protocol, where the direction of the routing pipeline dynamically changes based on node distribution. Additionally, to reduce the impact of routing voids, ref. [
26] provided its solution. Furthermore, two studies have outlined the routing protocol design in two stages: the first involves defining the forwarding area, and the second selects a forwarding node from the candidate set using various methods. For instance, game theory can be used to design strategy sets and gain functions or to derive forwarding probability through the Nash equilibrium [
27]. Alternatively, forwarding probability can be calculated directly from node location information [
28]. However, neither of these studies considered energy management; therefore, the network lifetime cannot be guaranteed.
In addition to routing protocols, several studies have also provided valuable methodological inspiration and technical guidance for enhancing real-time adaptive routing and intelligent decision-making strategies in UASNs. For example, studies on high-precision localization using multisensor association in space environments [
29], the real-time trajectory planning and tracking control of bionic underwater robots in dynamic environments [
30], and the design of a forward-looking sonar system with a lightweight multiscale attention network for environmental perception and intelligent decision making [
31] offer important references for developing UASN systems with improved environmental awareness and dynamic adaptability.
The research purpose of this paper is to optimize the forwarding process of the three-dimensional (3D) underwater acoustic sensor network (UASN) routing protocol by using a fuzzy reasoning system, and the most important part is to deduce the candidate priority of nodes. The fuzzy logic reasoning system has already made important contributions to the research of opportunistic networks and ad hoc networks [
32,
33]. Inspired by these developments, we design a fuzzy logic reasoning adaptive forwarding (FLRAF) routing protocol for 3D UASNs and select the forwarding nodes using the fuzzy logic reasoning tool. We innovatively build a nested fuzzy logic reasoning system to determine node candidate priorities. The inner layer obtains the link quality index (
), while the outer layer determines node candidate priorities. In the process of obtaining
, refs. [
34,
35] inspires us, but after obtaining the cumulative packet reception rate (
), a series of
values are used for calculating its coefficient of variation to serve as one of the fuzzy input variables, which may lead to a misjudgment of the link quality, because when the network encounters an outlier due to a brief emergency, the use of the coefficient of variation will have a significant impact on the fuzzy output. Therefore, we innovatively use the interquartile range of the cumulative
value as one of the inputs of the link quality assessment task to evaluate the
more comprehensively. Finally, we highlight the key innovations of the proposed FLRAF method.
- (1)
The FLRAF routing protocol redefines the geometric boundary and selection criteria of the new forwarding area. It allows more suitable nodes to participate in the forwarding process and prevents unnecessary forwarding by nodes in unfavorable positions, thus reducing transmission redundancy. In addition, unlike traditional approaches based on pipeline or hemispherical forwarding regions, the conical forwarding area helps maintain the directional consistency of multihop forwarding paths from the source node, minimizing path deviations and thereby reducing the total number of hops required for transmission, which improves forwarding efficiency and ensures higher energy efficiency.
- (2)
The FLRAF routing protocol designs a fuzzy logic reasoning system to improve the accuracy of link quality assessment. The system comprehensively analyzes the smoothed obtained through exponentially weighted moving average processing (), the signal-to-noise ratio (), and the interquartile range () of the to complete the assessment task. By incorporating and into link quality assessment, the proposed method improves robustness against transient fluctuations and provides a more stable estimation of link quality trends, ensuring accurate and reliable evaluation in dynamic underwater environments.
- (3)
The FLRAF routing protocol builds a nested fuzzy logic reasoning system to complete the selection of candidate sets in the forwarding region. The inner inference system obtains the between nodes, while the outer inference system comprehensively considers the output of inner inference, the residual energy (), and the effective advance distance () of nodes to obtain the priority ranking. By incorporating a novel multimetric fuzzy logic decision model, the method improves the packet delivery rate of the network and some parameters related to energy consumption.
The rest of this article is structured as follows.
Section 2 presents the detailed implementation of the FLRAF protocol, including its forwarding process and fuzzy-logic-based decision strategy.
Section 3 provides a comprehensive performance comparison with existing routing protocols under various simulation scenarios.
Section 4 summarizes the main findings, discusses current research limitations, and outlines future work directions to enhance the adaptability and intelligence of underwater routing protocols.
2. Description of the Proposed Approach
2.1. Network Architecture
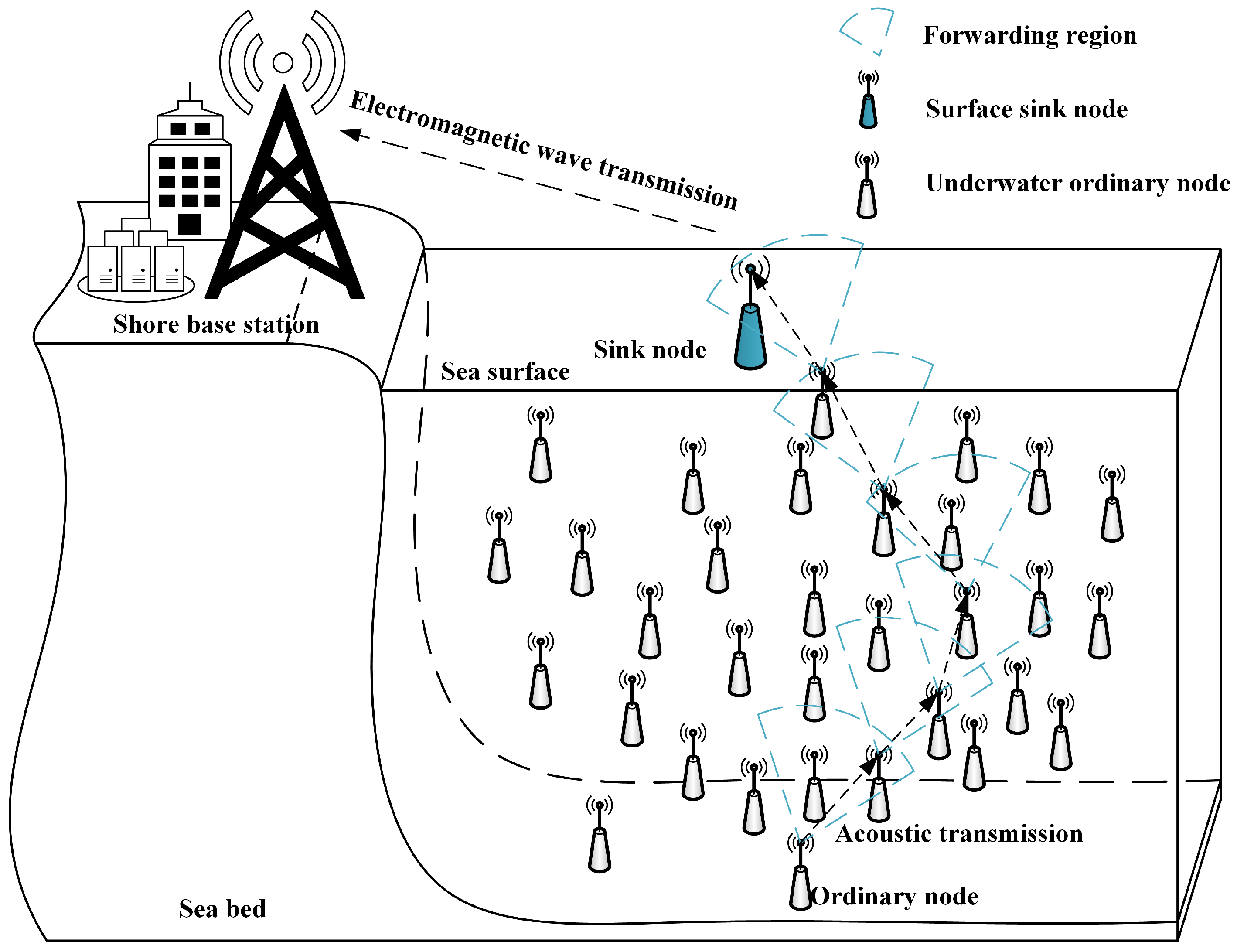
The FLRAF routing protocol utilizes the network architecture depicted in
Figure 1, which comprises ordinary sensor nodes, sink nodes, and a shore-based station. The ordinary sensor nodes, which are responsible for data collection, are dispersed randomly within a 3D space. The sink nodes, fixed on the ocean surface, gather the data collected by the ordinary sensor nodes. Consequently, after receiving the acoustic data transmitted from ordinary sensor nodes in a hop-by-hop manner, the sink nodes aggregate the information and relay it via electromagnetic waves to the shore station for subsequent processing and analysis.
2.2. Network Model of the FLRAF
The transmission attenuation of the underwater acoustic signal depends on center frequency and transmission distance. In this paper, we use the Urick model to characterize the underwater acoustic signal’s propagation loss [
36], which can be expressed as
where
d represents the Euclidean distance between nodes (in m),
k is the spreading factor describing the propagation geometry with a value ranging from 1 to 2, typically set to 1.5,
f denotes the acoustic carrier frequency (in kHz), and
represents the absorption coefficient.
For the Euclidean distance
d between nodes,
is used to represent the 3D coordinates of any node and
can be used to represent the Euclidean distance between any two nodes. The calculation formula is as follows:
We note that a variety of underwater localization technologies have been extensively studied and applied, which can effectively mitigate the impact of signal distortion on localization accuracy. These technologies provide a solid foundation to ensure the feasibility of position-based forwarding strategies in practical scenarios [
37,
38].
The absorption coefficient
can be determined according to Thorp’s empirical formula [
36], which is calculated as
Besides path loss, underwater acoustic signals face interference from ocean noise during transmission. Ocean noise
comprises various components, which can be broadly categorized into the following environmental noise sources: shipping noise
, turbulence noise
, thermal noise
, and wave noise
. The calculation can be determined using
where
s represents the shipping activity factor, which is a constant ranging from 0 to 1, typically set to
s = 0.8, and
w is the speed of wind (in m/s) set according to specific conditions.
After obtaining the transmission loss of the underwater acoustic signal, if only path transmission loss and noise interference are considered, the
between nodes can be estimated using
where
P represents the transmitted acoustic source power (in
) and
denotes the noise power spectral density. It is important to note that nodes convert electrical signals into acoustic signals to transmit data via underwater acoustic transducers. The conversion between the transmitted acoustic source power and the electrical transmission power is determined by
where
is the efficiency of the underwater acoustic transducer, represented as a constant between 0 and 1, typically set to
= 0.8,
is the electrical transmitting power (in W).
In this study, the acoustic characteristics of the transmission channel are primarily considered through the conversion between electrical power and acoustic source power, along with modeling the attenuation properties of sound propagation in underwater environments. Detailed structural-acoustic properties of the transducers and propagation interfaces are not explicitly modeled. In contrast, recent studies such as [
39] have provided a more comprehensive analysis of vibroacoustic behavior by considering the sound transmission loss (STL) characteristics in lattice sandwich structures. Such detailed modeling offers valuable insights that can serve as a useful reference for our future research directions involving physical-layer acoustic modeling.
2.3. Forwarding Area of FLRAF
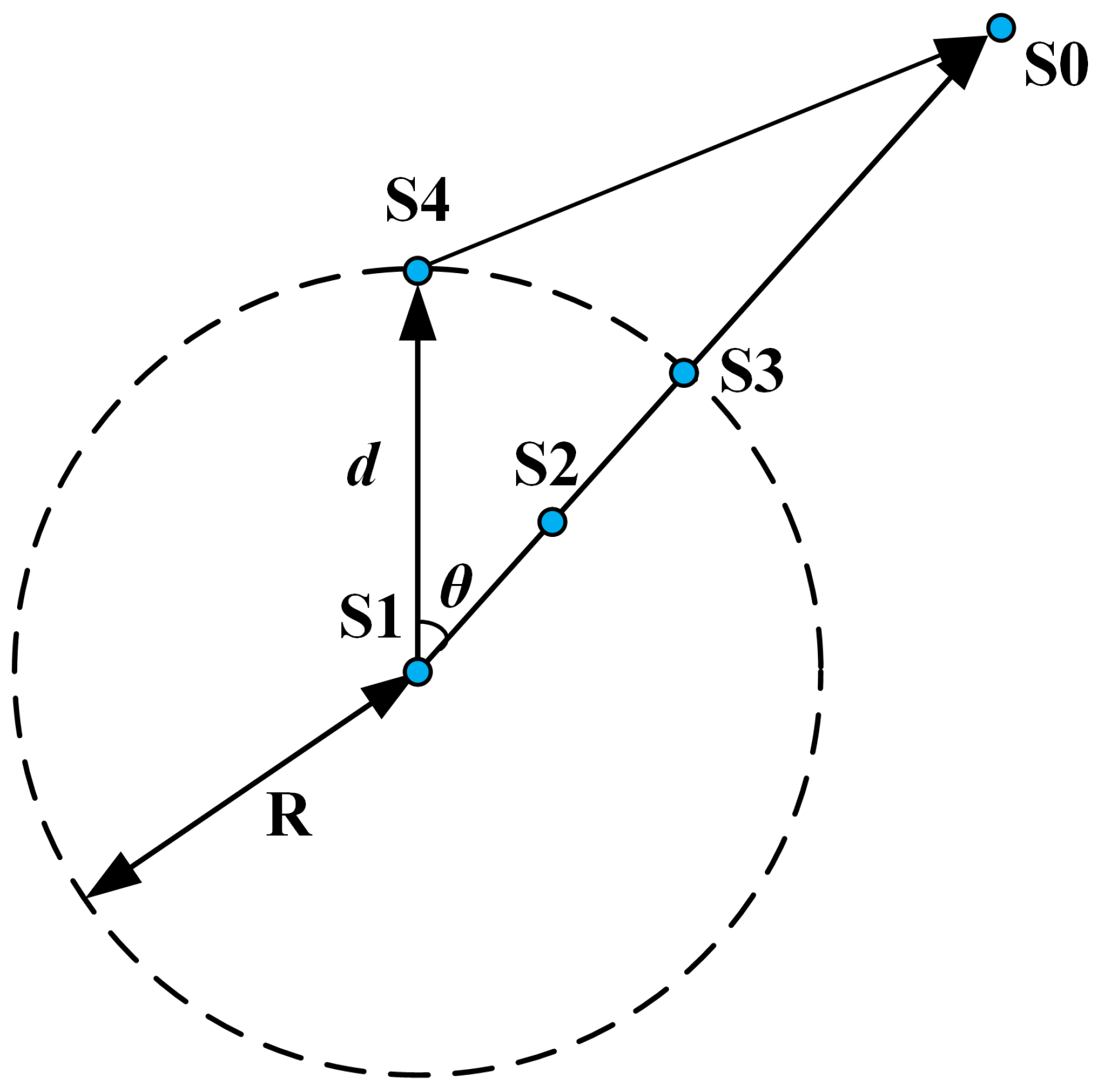
Figure 2 shows the one-hop transmission range scenario of UASN data transmission, where node S0 is the sink node and node S1 is the current forwarding node. If S4 is selected as the next hop forwarding node, the effective advance distance
is defined as
From the perspective of the Thorp propagation model, when data are transmitted via multiple hops to the final sink node, maximizing for each hop will minimize the end-to-end delay and the number of hops from the data transmission standpoint. Consequently, this approach provides benefits in both energy efficiency and transmission latency.
Specifically, as shown in
Figure 2, when node S2 is located on the line connecting nodes S1 and S3, within the one-hop transmission range of S1 with a radius of R, S1 can directly send data to S3. It can also relay data through forwarding node S2. These two forwarding schemes have different energy consumption levels. Assuming the received signal power is
, according to Equation (
9), the node transmission power is
. For the two mentioned data transmission schemes, we can use
to represent the energy consumed by single-hop transmission and multihop transmission within the one-hop transmission range, where
denotes the energy required for the electronic equipment of the transmitter and receiver and
represents the transmission time of a data packet. Assuming that multihop transmission is more energy-efficient, then
When node S2 lies on the line connecting nodes S1 and S3, there is
; otherwise, there is
. In terms of communication hardware, we choose the commonly used underwater acoustic modem model UWM1000 (LinkQuest Inc., San Diego, CA, USA) [
40]. After our verification, obviously, Equation (
14) is not valid, that is to say, within the one-hop transmission range,
, extended to the whole network range, in order to maintain the optimal energy consumption, it is necessary to ensure as few multihop transmission hops as possible. When the current forwarding node is S1, nodes S3 and S4 are within the one-hop transmission range, but
; therefore, to ensure as few multihop transmission hops as possible, nodes with larger
within the forwarding node should be selected. To further constrain the forwarding node and make the forwarding area contain as many nodes with larger
as possible, we redefine the geometric boundary and selection criteria of the forwarding area, as shown in the blue area in
Figure 3.
The forwarding area of node A can be represented as
where the coordinates
,
,
, and
denote the positional information for forwarding node A, sink node B, node C in the previous hop’s forwarding region, and location D shown in
Figure 3.
is the semi-vertex angle of the “cone” forwarding area. When the node position
satisfies Equation (
15), it can be determined that the node is in the forwarding area of the previous forwarding node. Since the vertex of the “cone” forwarding area is at
, the axis is along
, and the semi vertex angle is
, we only need to ensure that the angle
between the vector
from the center of the sphere
to the point
and the “cone” axis vector
is less than or equal to
. We have
and let
, finally let
That is to say, A needs to be confined within the sphere. In addition, to determine the scope of the optimal forwarding area in the future, it is agreed here that .
2.4. Evaluation of Link Quality Between Nodes
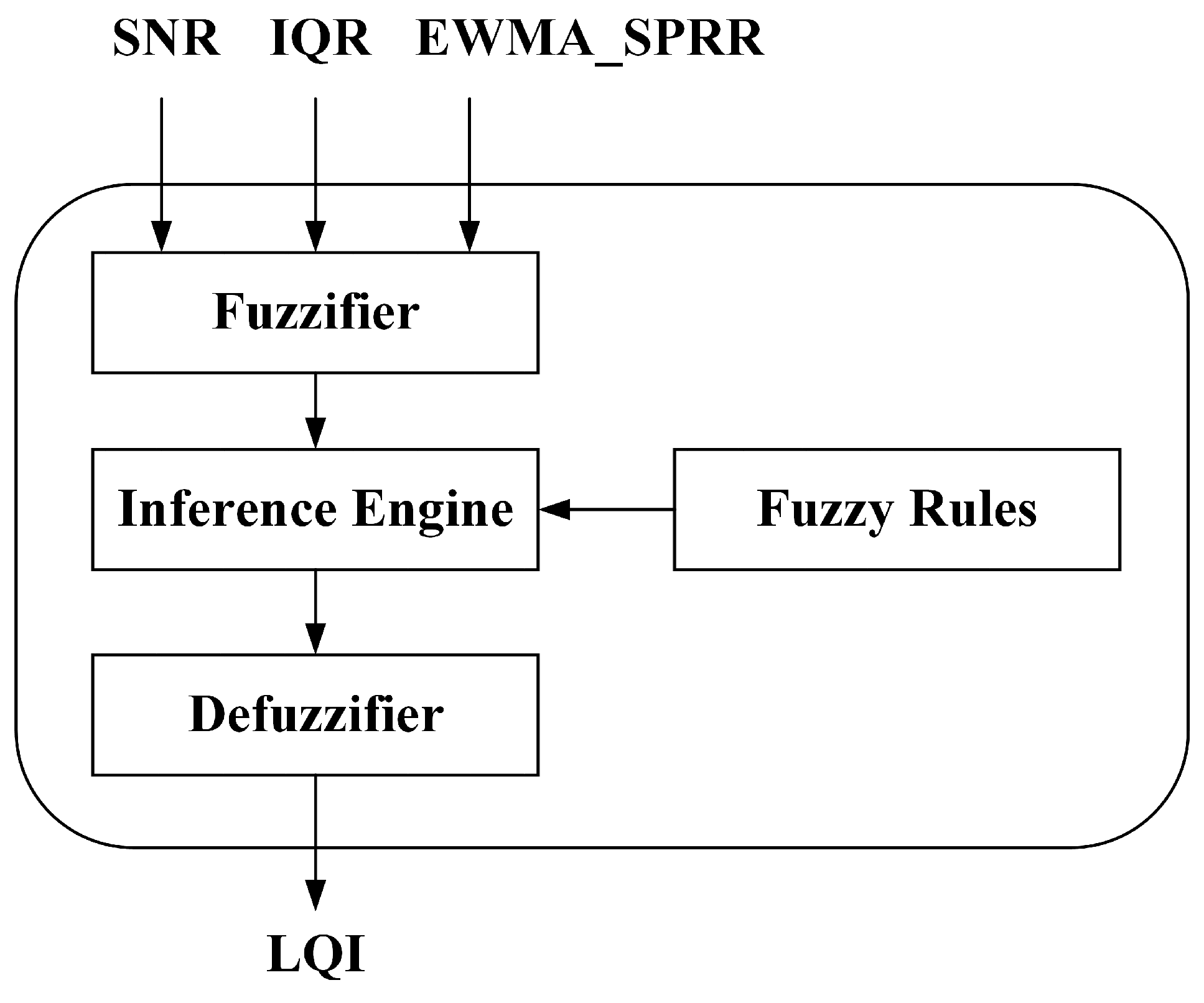
A fuzzy logic reasoning system is an intelligent system that uses fuzzy logic for reasoning and decision making. Its functions include processing uncertainty, fuzzy information, and complex multidimensional data. The implementation process of fuzzy reasoning usually includes fuzzification, rule-based reasoning, and defuzzification steps. This system is commonly applied in fields such as automatic control, pattern recognition, intelligent transportation systems, and wireless sensor networks. Through precise evaluation and decision making, the efficiency and reliability of the system are improved. In this section, we constructed an inner layer fuzzy logic reasoning system to complete the evaluation task of inter-node link quality, as shown in
Figure 4.
In addition to the
mentioned in Equation (
9), the input to the fuzzy inference system also includes two other parameters: the interquartile range (
) of the cumulative
at different time points and the smoothed
obtained through exponentially weighted moving average processing (
). The rationale behind selecting these two parameters is as follows. First, we do not use the coefficient of variation (
) of
because it is highly sensitive to fluctuations in link quality at a single time instant, which may lead to misleading results. For instance, a momentary degradation in link quality can cause a significant drop in
, thereby introducing substantial variations in the computed
. In contrast, the
is more robust to transient fluctuations, as it primarily reflects the dispersion of the middle 50% of the data points. This makes
a more stable metric for assessing long-term link quality while filtering out short-term variations. Additionally, we calculate the
because it provides a predictive capability. By assigning exponentially decreasing weights to past observations, the
value enables a smoother estimation of
trends, allowing for a more reliable prediction of future link quality based on historical data. This predictive aspect is particularly beneficial in dynamic underwater acoustic environments, where link quality can fluctuate due to various factors, such as mobility, multipath effects, and environmental disturbances.
reflects the real-time physical channel quality and serves as a primary indicator of potential signal distortion due to environmental noise. Higher values generally imply more favorable transmission conditions. However, due to the inherent volatility of underwater channels, relying solely on instantaneous may lead to unstable decision making. of captures the dispersion of values over a predefined observation window, quantifying the consistency and stability of the link performance. A smaller implies a more stable link, while a larger indicates fluctuating reception quality and potential unreliability due to transient disturbances such as mobility or interference. introduces a smoothing mechanism that emphasizes recent trends while still considering historical observations. This exponentially weighted average enhances temporal robustness, mitigating the effects of outliers or sudden dips caused by momentary channel degradation.
The fuzzy inference mechanism leverages the degree of membership of these parameters to predefined fuzzy sets (e.g., High
, Low
, Good
) and integrates them through fuzzy rules to output an aggregated
value, which reflects both instantaneous and long-term link quality trends. This design aims to reduce susceptibility to short-term fluctuations and provide a more resilient and adaptive link assessment model for routing decisions. That is to say, by integrating
and
, our approach effectively balances robustness against transient fluctuations and adaptability to long-term link quality trends, enhancing the reliability of our routing decisions. Assuming we have obtained the
values at the current time point
t and
n previous time points, we will take the obtained 10
values (assuming they are already arranged from small to large) as an example to introduce the calculation process of the
. First, arrange the data from small to large, and then find the positions of the 25th and 75th percentiles of the data, namely the lower quartile
and upper quartile
:
Additionally, calculate
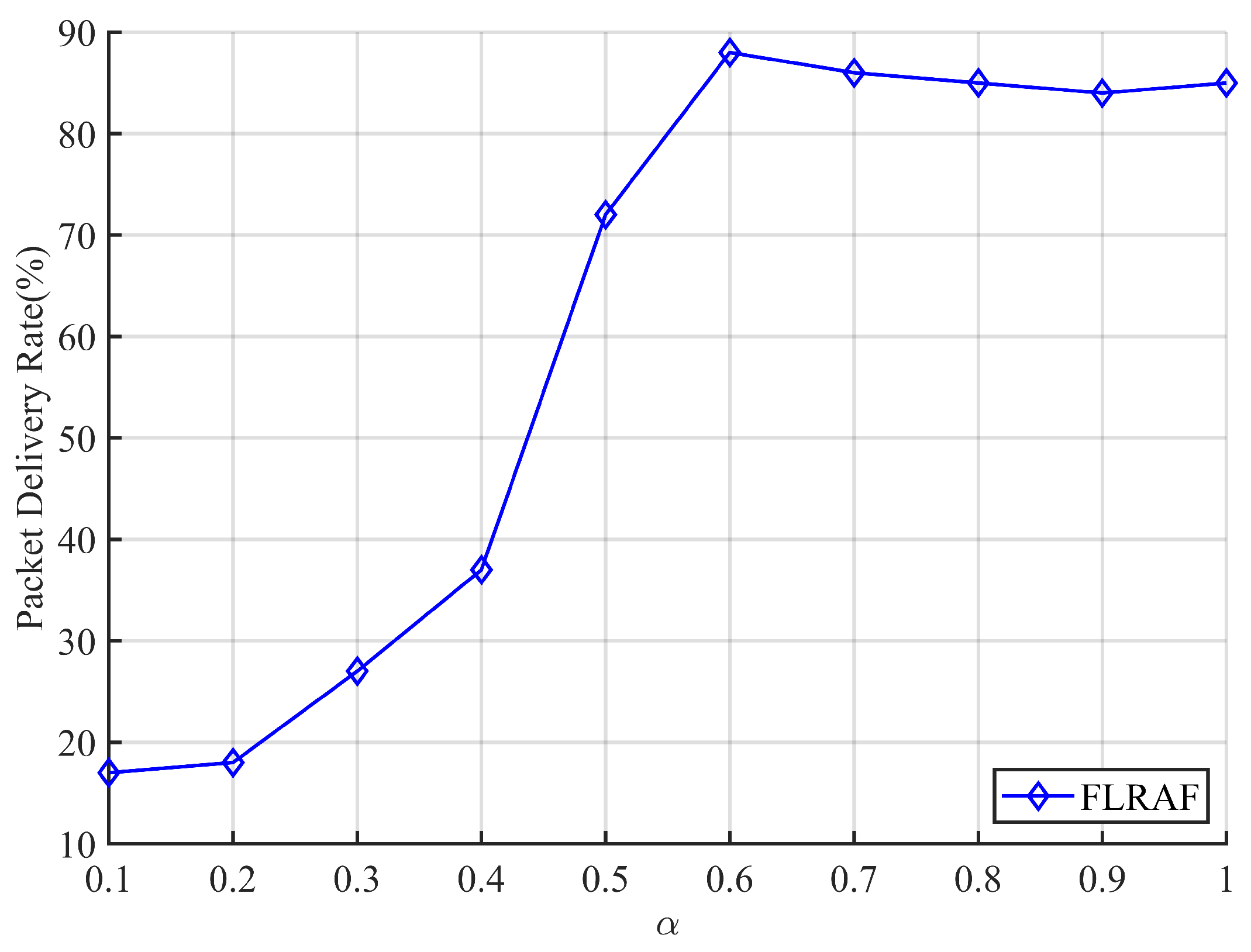
using the following recursive formula:
where
controls the smoothness of the weighted moving average.
Furthermore, although the current evaluation environment assumes relatively stable underwater acoustic conditions, the proposed fuzzy-logic-based routing protocol exhibits strong adaptability to dynamic environmental factors such as temperature gradients, water currents, and multipath propagation effects. The modular structure of the fuzzy inference system allows for seamless integration of additional environment-aware parameters, such as signal delay spread or Doppler shift estimates, which can further enhance link quality assessment accuracy. This design flexibility ensures that the protocol remains robust and scalable even in complex and time-varying underwater acoustic environments, laying a solid foundation for future improvements in highly dynamic application scenarios.
Figure 5 illustrates the process of obtaining the
. The detailed application of the fuzzy logic reasoning system is further addressed in the subsequent design of the outer-layer fuzzy reasoning system, which is used to prioritize candidate sets in the opportunistic routing and forwarding area.
2.5. Fuzzy Logic Reasoning Selection of Candidate Set
The outer layer fuzzy reasoning system comprehensively considers three parameters: node residual energy
, which affects the final network lifetime; link quality index
, which affects the final packet delivery rate; and effective advance distance
of nodes, which affects the multihop forwarding efficiency, to participate in the outer layer fuzzy reasoning. That is to say, the
represents the communication reliability of the node’s link to the next hop and directly impacts the packet delivery ratio. Prioritizing nodes with higher
ensures stable and successful data transmission. The
level reflects the remaining battery capacity of the node. Giving higher forwarding priority to nodes with greater energy reserves contributes to balanced energy consumption across the network and helps extend the overall network lifetime. The
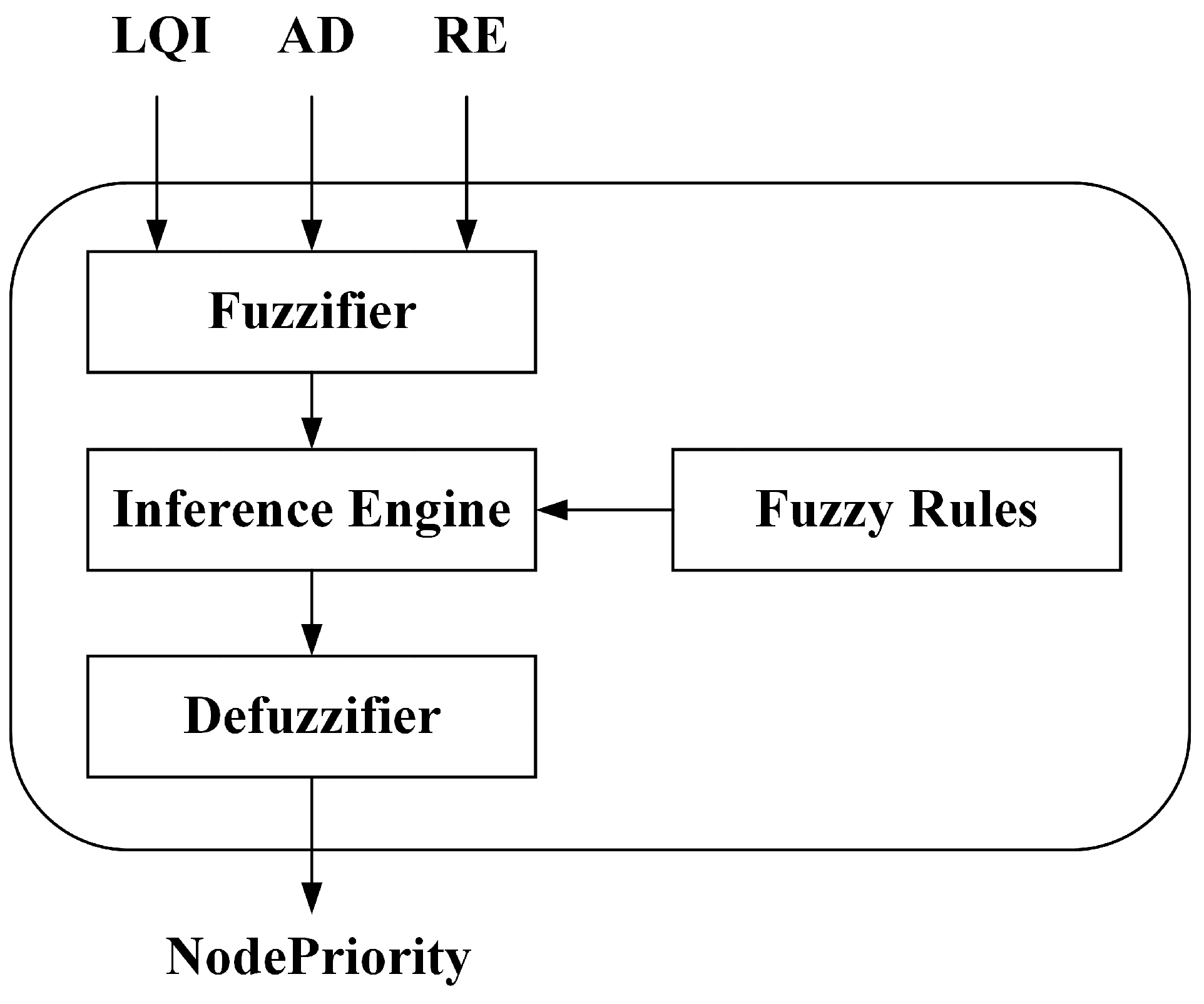
level is a spatial metric that promotes efficient data propagation. Nodes with larger forward progress are generally closer to the destination, reducing the number of required hops and potentially minimizing end-to-end transmission delay. This metric implicitly promotes low-latency routing, which is especially critical in delay-sensitive underwater applications. The schematic diagram of the outer layer fuzzy reasoning is shown in
Figure 6.
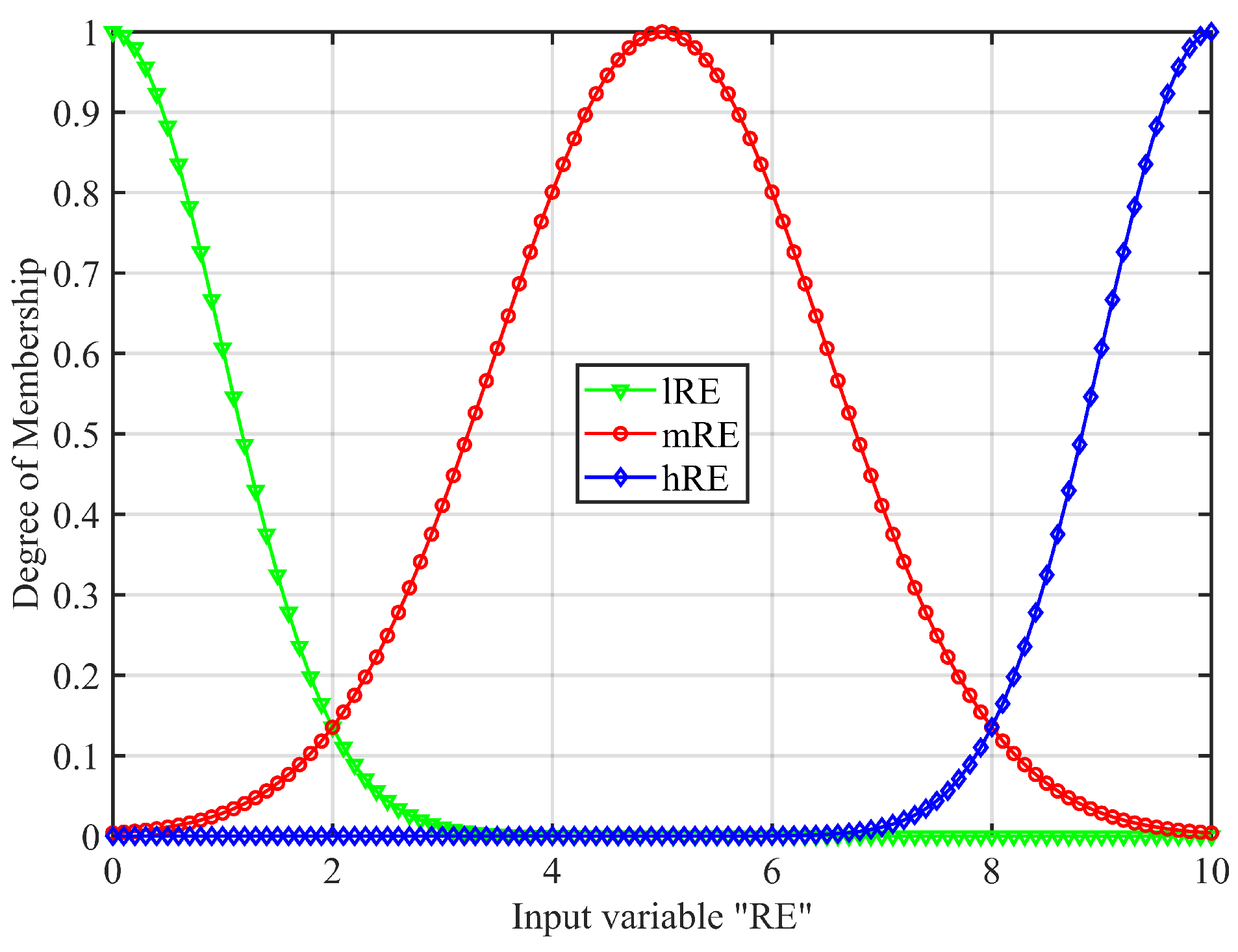
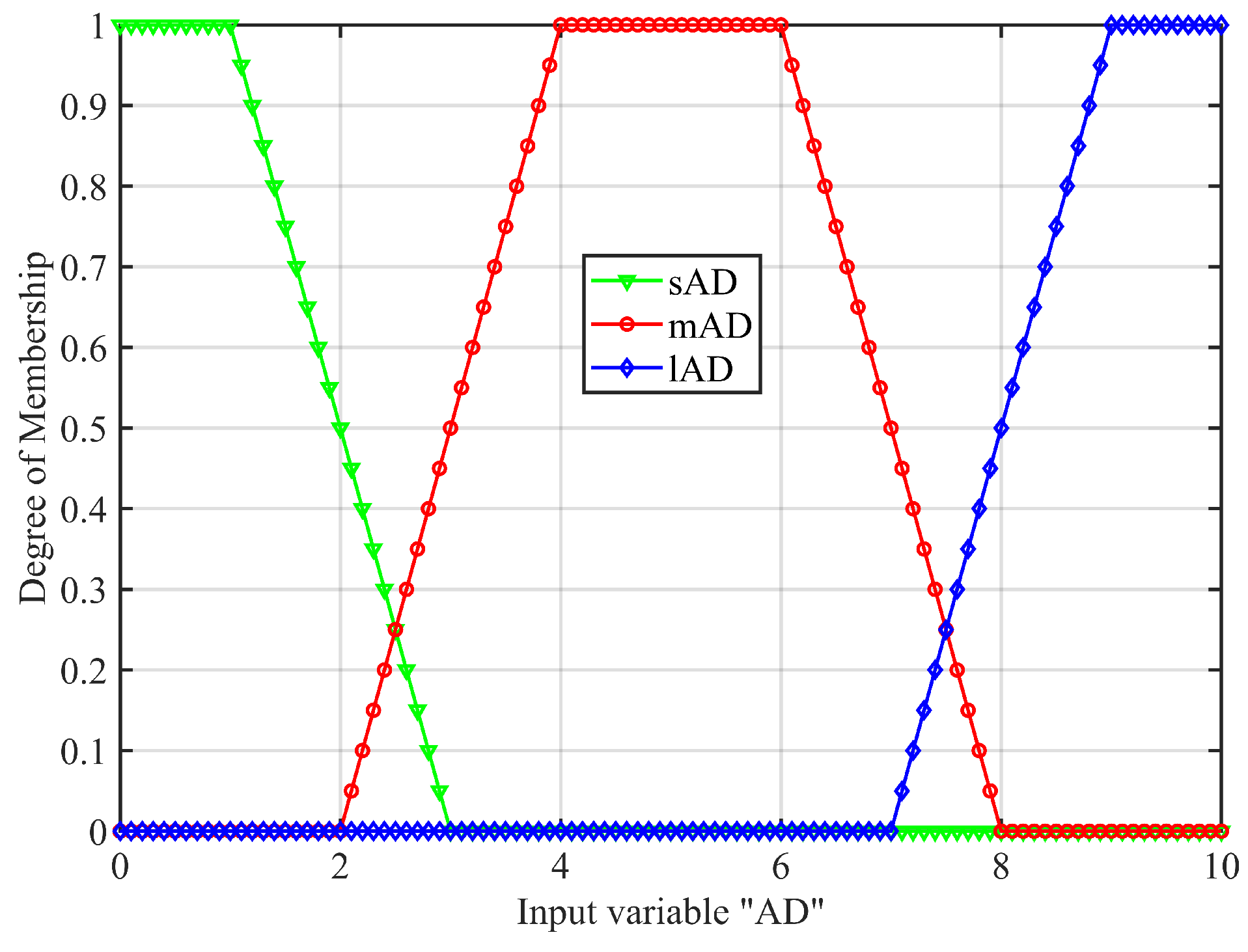
The specific process of building a fuzzy logic reasoning system to complete specific design tasks can be roughly summarized into four steps. First, clarify the design problem, the input and output of the system, and their possible range of variation. The outer fuzzy inference system takes into account three parameters: the link quality index
that affects the final data packet delivery rate; the nodes’ remaining energy
that affects the final network lifetime; and the effective advance distance
of the nodes that affect the multihop forwarding efficiency to participate in the outer layer fuzzy inference. To make the weights of multiple fuzzy inputs more balanced and improve the performance of the model, the original fuzzy input data are first linearly mapped to a specified range. Given an original data point
x, we aim to map it to a new range
, which can be linearly mapped according to the following formula:
We plan to map the original fuzzy input to a new range , so we take .
Next, we determine the number of fuzzy subsets for the input and output variables. The number of fuzzy subsets is related to the granularity of the fuzzy inference. Based on the types of fuzzy subsets, the corresponding membership functions are established. In this case, each of the three fuzzy input variables is assigned three fuzzy subsets. The respective membership functions are then configured accordingly. The detailed configuration is presented in
Table 1.
Table 1 shows the membership functions for the fuzzy subset of the four variables. It is worth mentioning that the determination of the membership function for fuzzy variables corresponding to fuzzy subsets requires comprehensive consideration. Generally, fuzzy sets can be classified into three types: small-type, medium-type, and large-type. For example, “low node energy” represents a small-type fuzzy set, where the membership degree increases as the energy value decreases, indicating a worse node energy state. Conversely, “high node energy” represents a large-type fuzzy set, where the membership degree increases with higher energy values, indicating a better node energy state. “Moderate node energy” represents a medium-type fuzzy set, where the membership degree is highest when the energy value falls within a certain intermediate range. In summary, it is important to consider the relationship between “elements” and “membership degree”, which implies the monotonicity of the membership function. This is essential to ensure that the fuzzy inference process produces logically consistent and semantically accurate outputs. If this relationship is not properly considered, the system may yield misleading evaluations. For instance, if a “low node energy” fuzzy set were mistakenly designed with a membership degree that increases with increasing energy, then a node with extremely low energy might be falsely assigned a low membership degree, misleading the system to treat it as a high-energy node and prioritize it for data forwarding—thereby accelerating energy depletion and reducing network lifetime. Therefore, appropriate membership function design is crucial for ensuring the correctness and robustness of the fuzzy inference system. Additionally, the use of different membership functions for the three other fuzzy input variables effectively avoids the feature representation blind spots that may arise from using a single function type. The resulting membership function graphs are shown in
Figure 7,
Figure 8,
Figure 9, and
Figure 10, respectively.
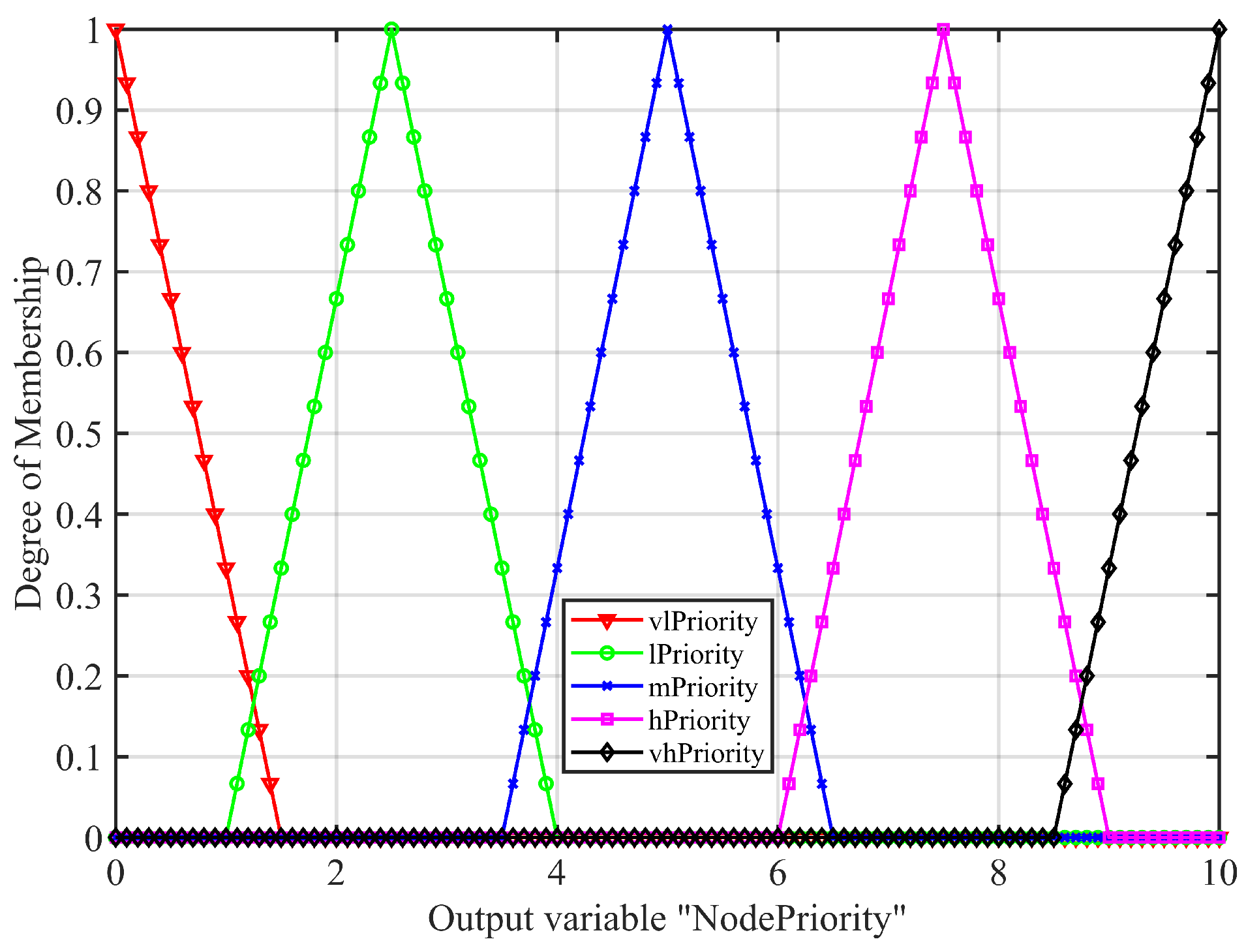
Second, according to the system design requirements, we set inference rules. Since we have set fuzzy logic inputs for three variables and each fuzzy input has three fuzzy subsets, we can exhaustively list all possible inference rules; however, due to space limitations, only a subset of the fuzzy reasoning rules is shown in
Table 2.
In fact, if we broadly define the three fuzzy subsets of fuzzy input as “good”, “medium”, and “poor”, then the fuzzy inference rules can be broadly categorized as follows:
- (1)
If all three fuzzy inputs are “good”, then the fuzzy output is “vhPriority”;
- (2)
If all three fuzzy inputs are “poor”, then the fuzzy output is “vlPriority”;
- (3)
If any two fuzzy inputs are “good”, the fuzzy output is “hPriority”;
- (4)
If any two fuzzy inputs are “medium”, the fuzzy output is “mPriority”;
- (5)
If any two fuzzy inputs are “poor”, the fuzzy output is “lPriority”;
- (6)
If the three fuzzy inputs are, respectively, “good”, “medium”, and “poor”, the fuzzy output is “mPriority”.
Finally, the fuzzy reasoning system progresses to the defuzzification process, where the Centroid defuzzification method is used to obtain the final fuzzy output. Assuming two candidate nodes exist within the forwarding area at the same time, their node state information is [8 8 2] and [8 8 9], respectively, (i.e., using [ ] to represent the state information of node i). After processing by our nested fuzzy inference system, the priorities of the two nodes are 6.82 and 8.59, respectively. Therefore, the FLRAF routing protocol tends to choose the latter as the forwarding node, because the former indicates that the node has good remaining energy and a long effective advance distance, but poor link quality, while the latter indicates that the node has excellent link quality, sufficient remaining energy, and long effective advance distance. On the other hand, when conducting fuzzy logic reasoning, different reasoning rules can also be assigned different weights to maximize their compatibility with the designer’s specific needs.
2.6. Forwarding Process of the FLRAF
The specific forwarding process of the FLRAF routing protocol is described as follows. First, during network initialization, the sink node broadcasts a data collection query, which is divided into location-based queries and queries that define event-triggering conditions. The former broadcasts data packets carrying the geographic location of interest to all nodes in the network, while the latter broadcasts data packets carrying events of interest to the sink node (such as whether the temperature in the area exceeds the threshold) to all nodes in the network. Through this step of processing, nodes know whether they need to start the data collection task. This preliminary step significantly reduces unnecessary energy consumption by allowing only relevant nodes to participate in data forwarding.
Second, each node that receives the query will determine its one-hop forwarding area based on the predefined geometric constraints and establish a candidate set of neighboring nodes. Using a fuzzy logic reasoning mechanism that comprehensively evaluates factors such as residual energy, link quality, and distance to the sink, the optimal forwarding node is identified. The selected node is responsible for transmitting the data, while other nodes in the candidate set discard the received data to avoid redundant transmissions and conserve energy. This decision-making process ensures both energy efficiency and robustness in dynamic underwater environments.
The forwarding node then transmits the data in a hop-by-hop manner, repeating the candidate selection and fuzzy inference at each step, until the data eventually reach the sink node. Finally, the sink node gathers the desired information and forwards it to the shore-based control station via its equipped radio modems for further analysis and processing. The complete forwarding process of the FLRAF routing protocol and the information that needs to be exchanged in each part to complete the forwarding task are shown in
Figure 11 and
Table 3.
4. Conclusions
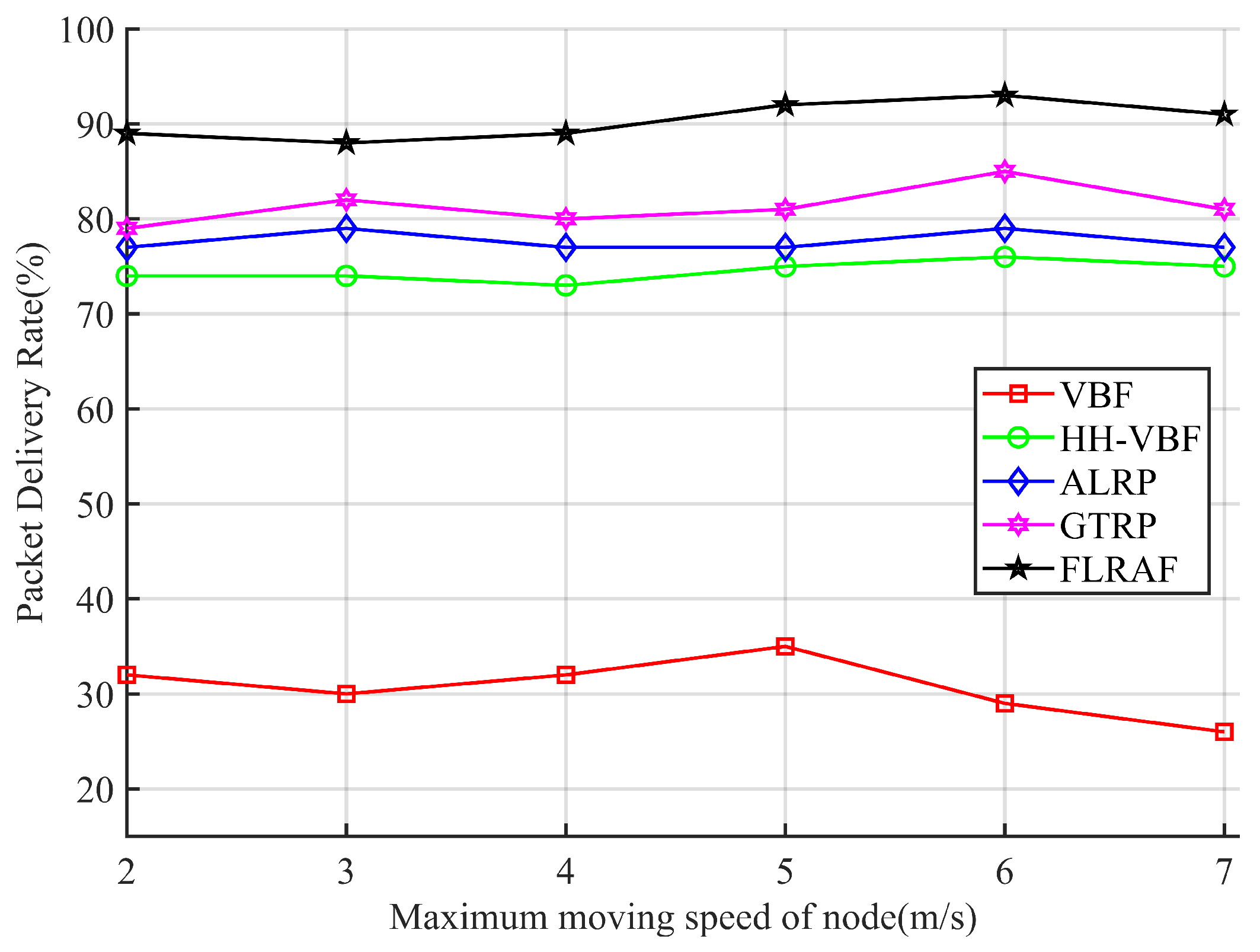
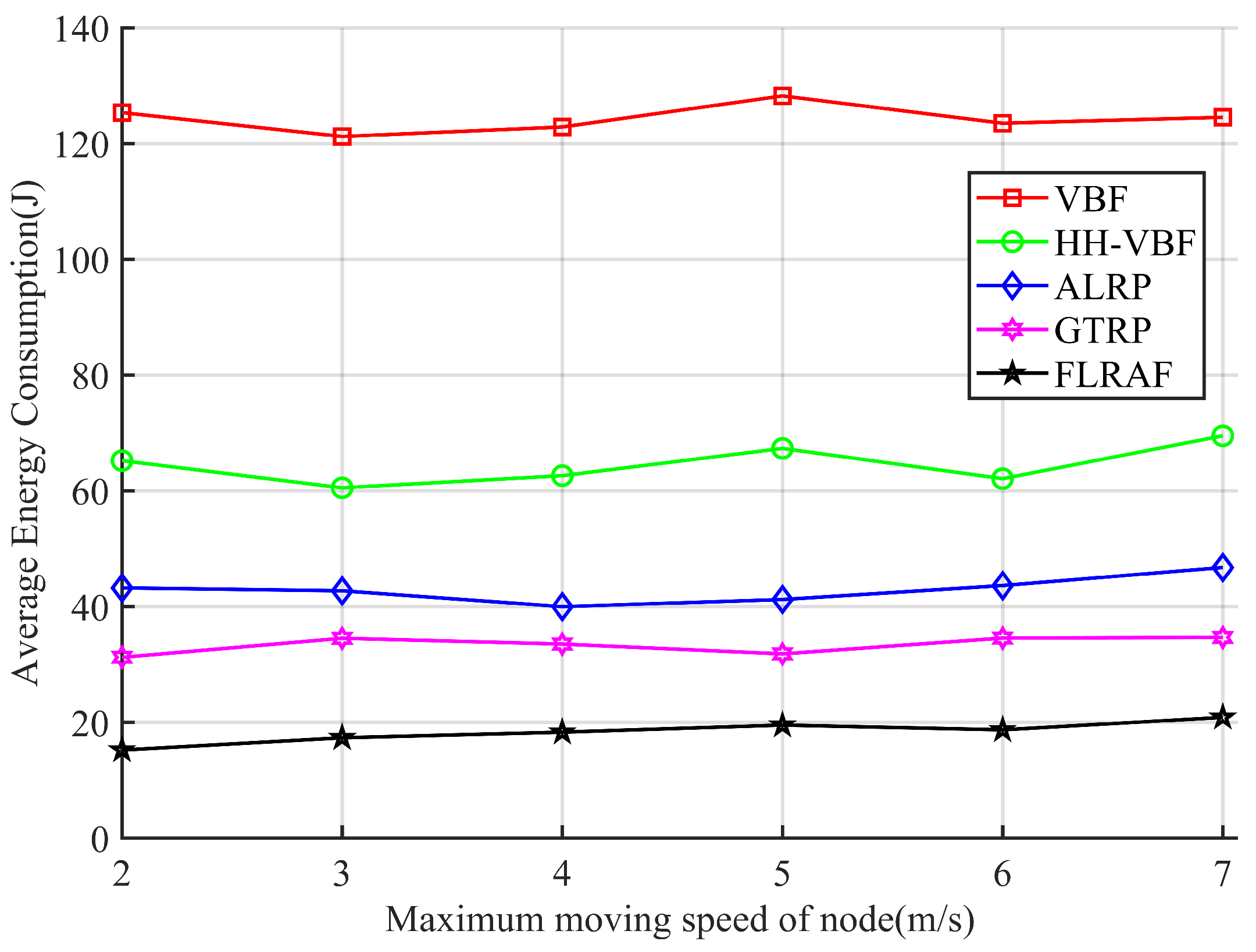
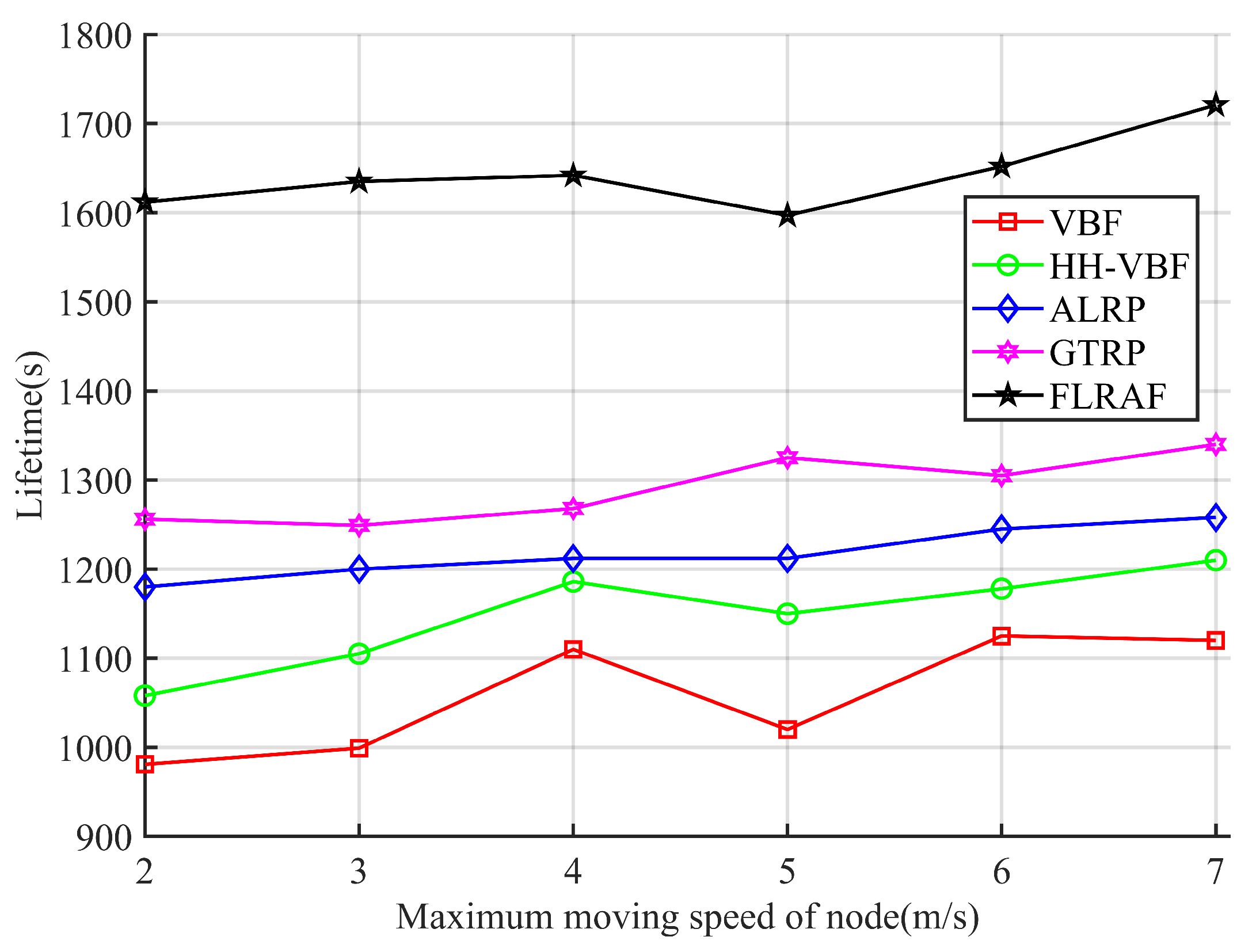
This study introduces a novel routing protocol designed for 3D UASNs, utilizing fuzzy logic reasoning to enhance performance, as it is well suited to handling fuzzy input variables related to node state information, such as “high residual energy”, “high advance distance”, etc. We first conducted a theoretical analysis and found that the fewer hops packets experienced, the better the energy efficiency of the network. Therefore, we establish a new forwarding area to maximize multihop forwarding efficiency and reduce redundant transmission. Equally important is how to adaptively select suitable forwarding nodes based on node spatial distribution and state information, which will directly affect the transmission delay and parameters related to the energy consumption of the network.
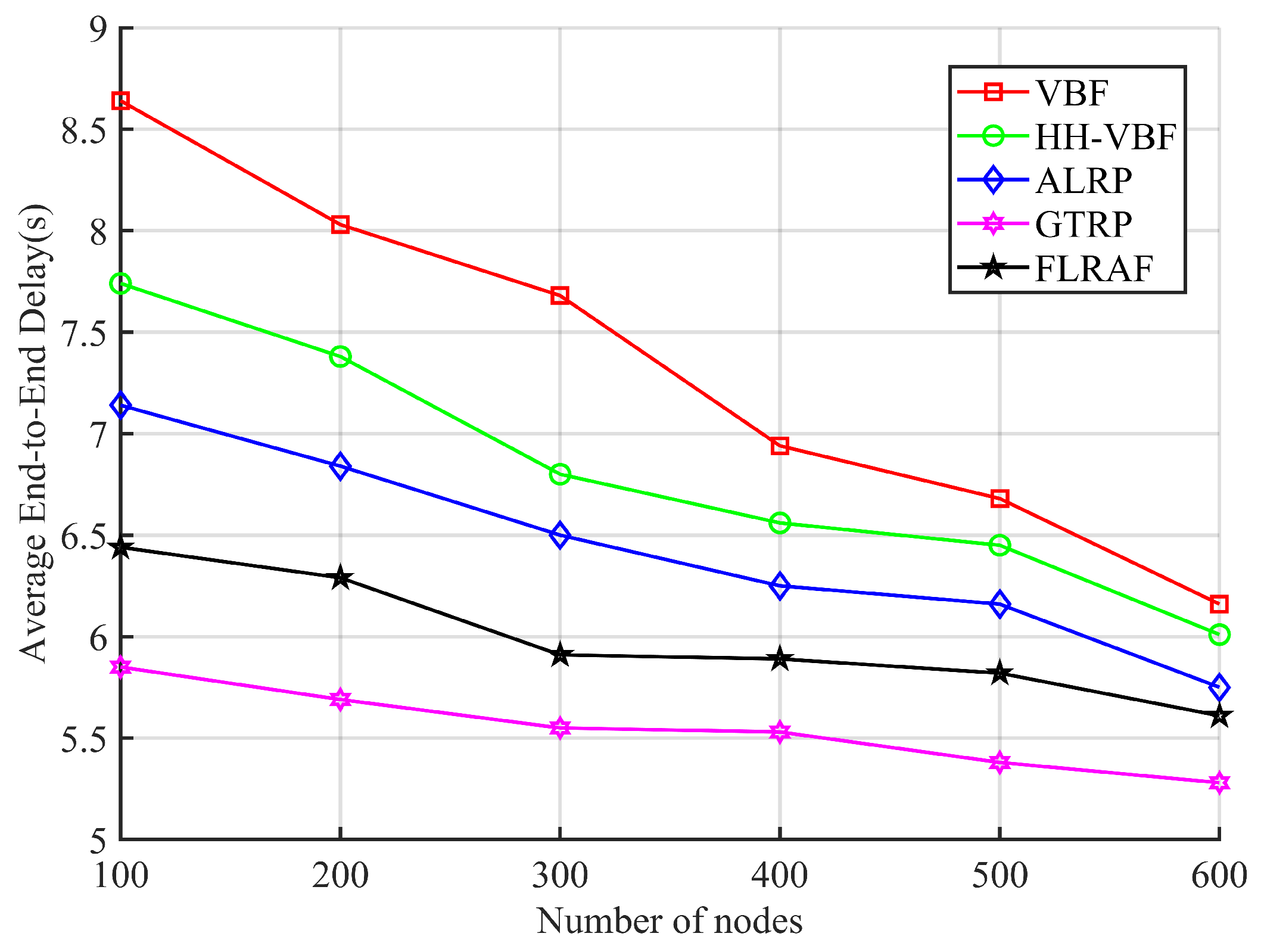
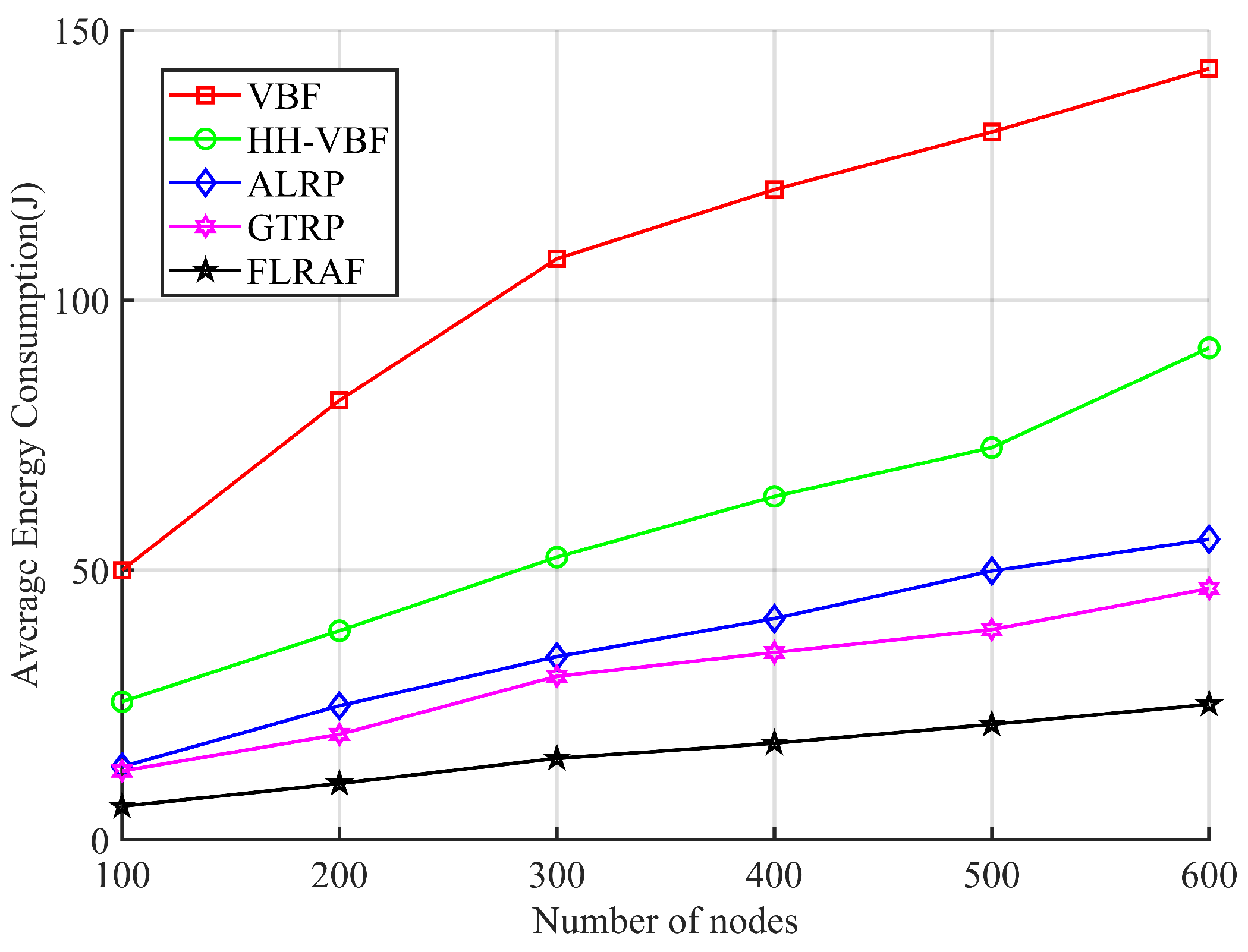
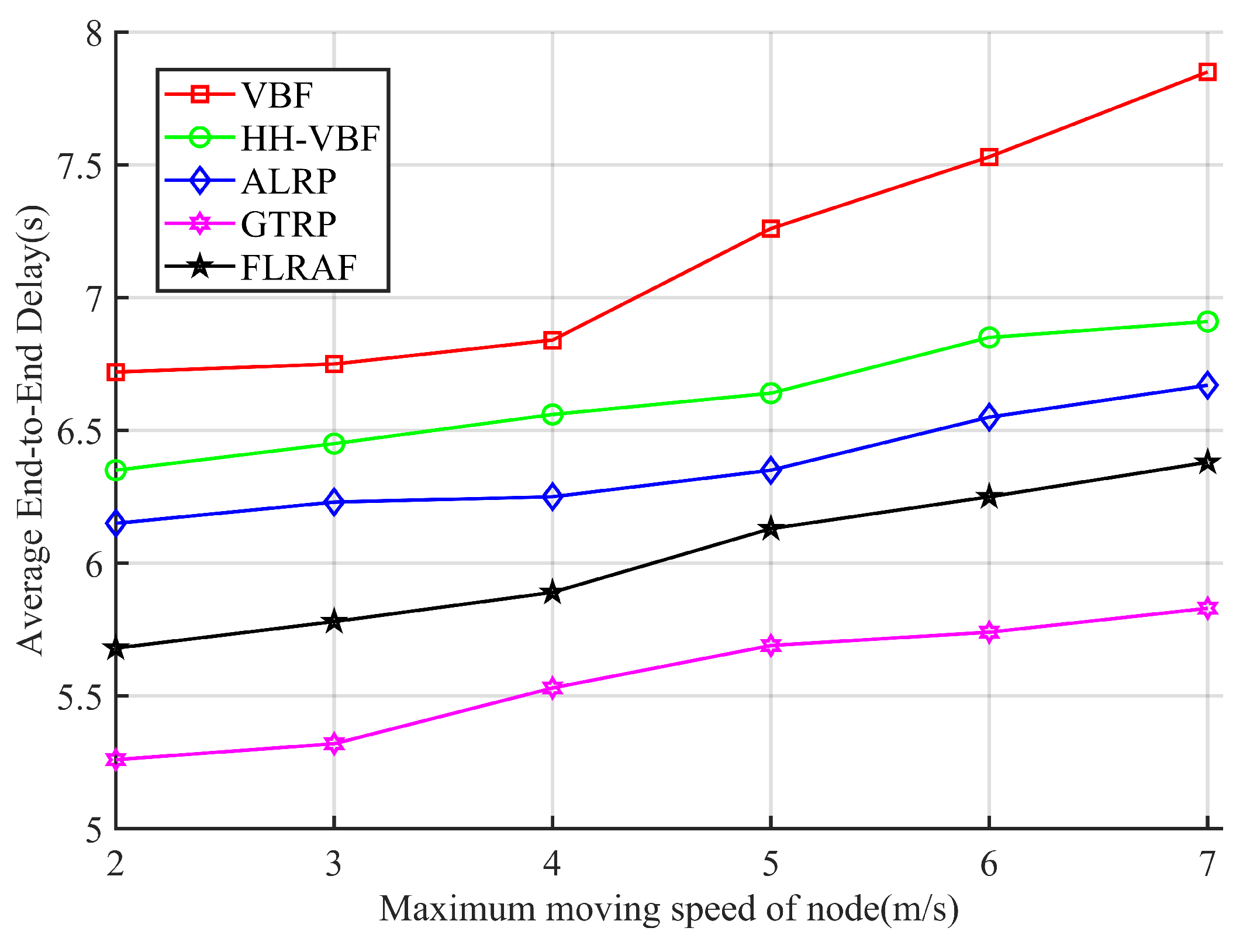
Through numerous simulations and validations, our proposed protocol demonstrates clear advantages over existing protocols in terms of average energy consumption, packet delivery rate, and network lifespan. On the one hand, it is due to the forwarding area we have established, which fundamentally reduces the possibility of inappropriate nodes acting as forwarding nodes. On the other hand, it is due to the outer fuzzy inference system we have designed, which reduces the possibility of a single node frequently acting as a forwarding node. This is very effective for extending the network lifetime. However, the performance of the FLRAF routing protocol in average end-to-end delay is not yet outstanding because it is necessary to transmit probe packets to complete the task. This process introduces unnecessary processing delay, which offsets the advantage of the FLRAF protocol in reducing transmission delay. Another important source of propagation delay is the priority evaluation task within the candidate set. After a node completes the final fuzzy reasoning, it reports the priority evaluation result to the next-hop forwarding node. This forms a many-to-one data transmission scenario. The original Broadcast MAC protocol is unable to effectively coordinate data transmission conflicts, leading to data collisions and the accumulation of propagation delay. The next step is to design a MAC protocol that can coordinate data transmission. For instance, an RTS frame containing queue length and data transmission time information is sent to the central node. The central node calculates the waiting time for node data transmission and encapsulates the coordination scheme into a CTS frame. Nodes then follow the coordination scheme to perform data transmission, thereby minimizing data collisions as much as possible. This is a problem that needs to be addressed in our subsequent research.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}