
Optimizing AUV Navigation Using Factor Graphs with Side-Scan Sonar Integration


Abstract
1. Introduction
- (1)
- In light of the dim underwater environment and significant noise, which may compromise feature-based registration methods, a Fourier transform preprocessing approach for image registration is introduced. This method directly compares the complete information of all the images to acquire the relative position of SSS image pairs. When compared with established feature-based methods, the improved approach demonstrates increased resilience in SSS image registration and delivers consistent results for relative position.
- (2)
- Conventional FGO fails to consider Earth’s rotation and thus inhibits utilizing Earth’s rotation for the AUV’s attitude correction. To address this issue, a high-accuracy FGO pre-integration approach that takes into account Earth’s rotation is proposed, ensuring attitude correction and significantly enhancing the heading accuracy.
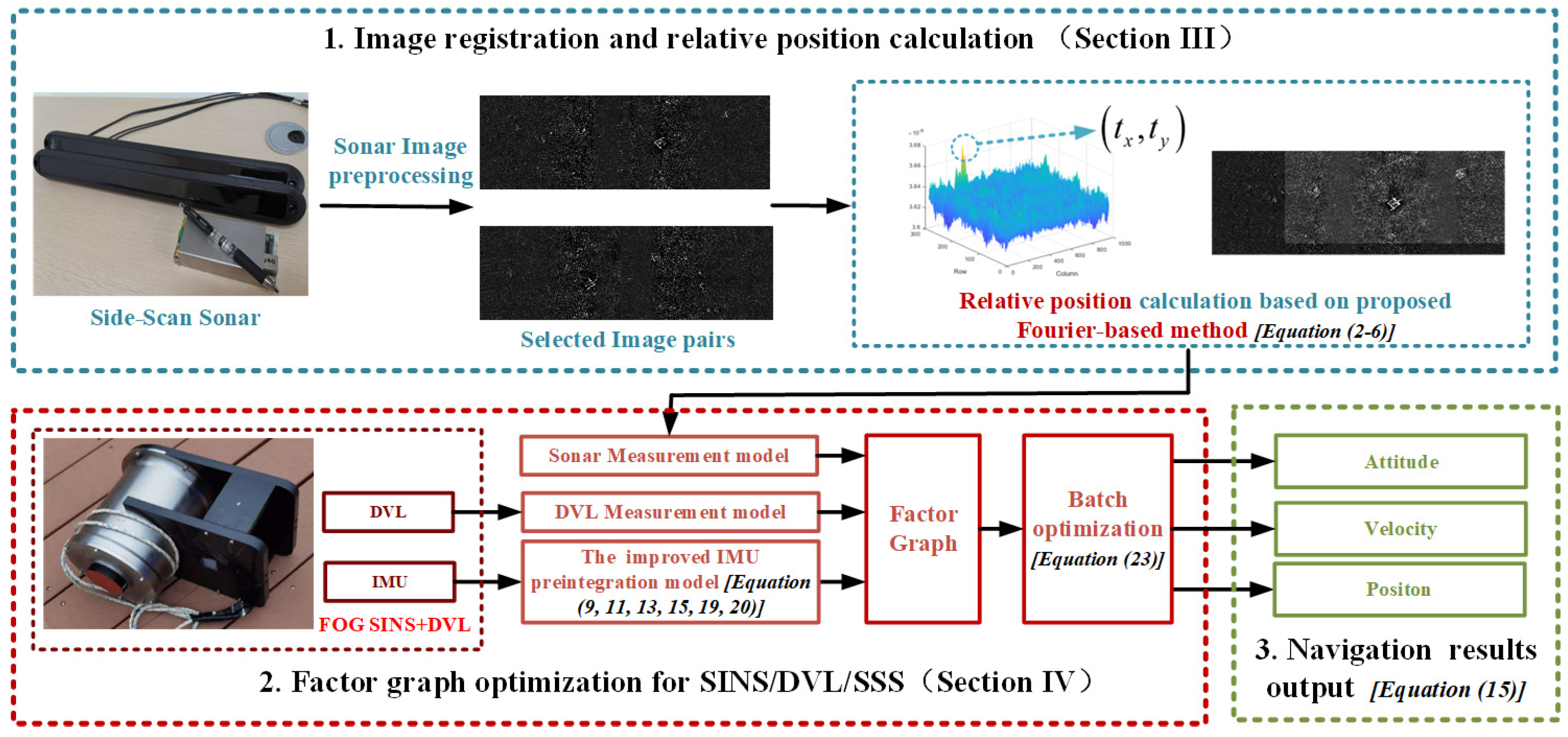
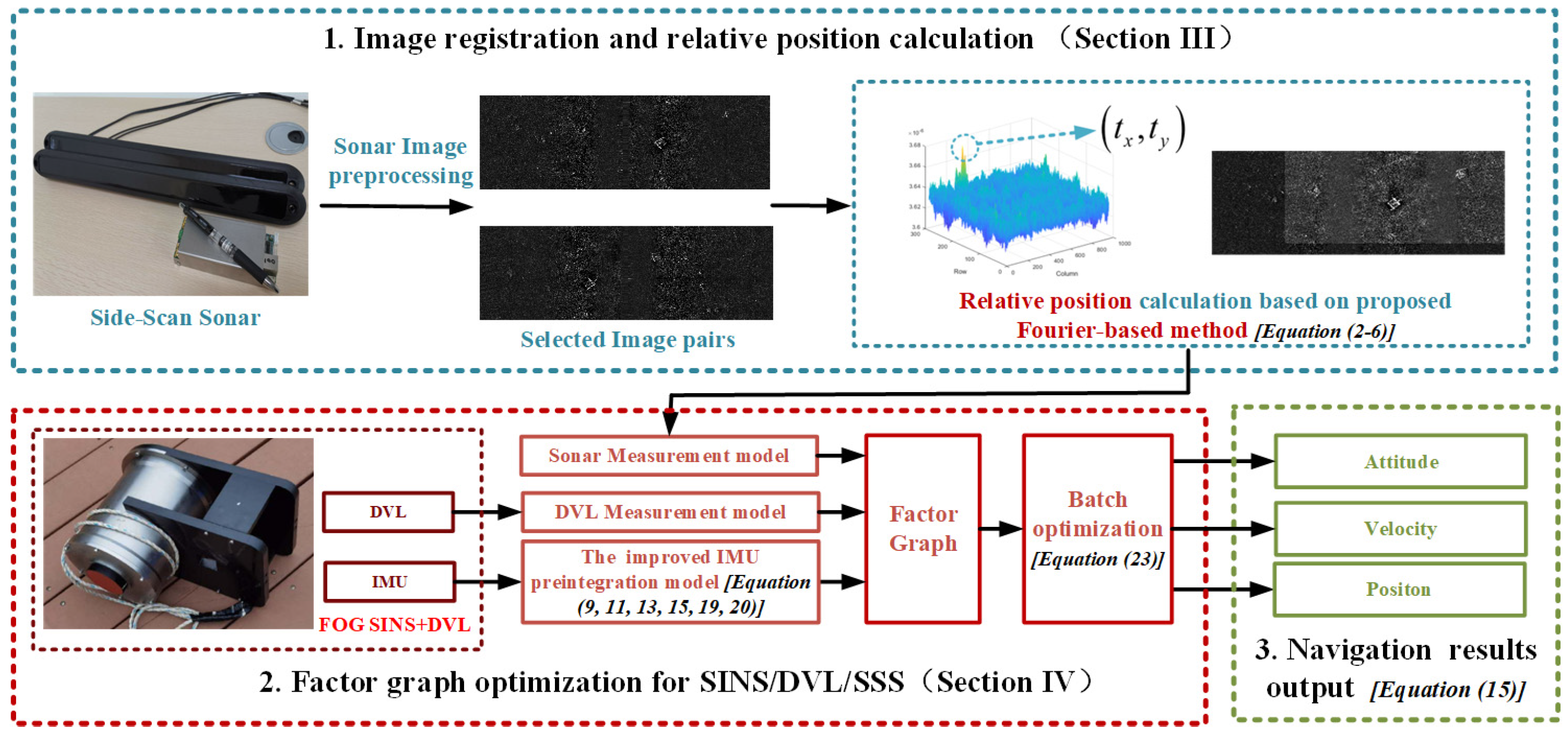
2. Overview
- (1)
- Registration of side-scan sonar images
- (2)
- Factor graph optimization
- (3)
- Information output
3. Fourier-Based Image Registration of SSS
3.1. Processing SSS Imagery
3.1.1. Distortion Correction
3.1.2. Brightness Correction
3.2. Fourier-Based SSS Image Registration
4. SSS-Added Integrated Navigation System Based on FGO
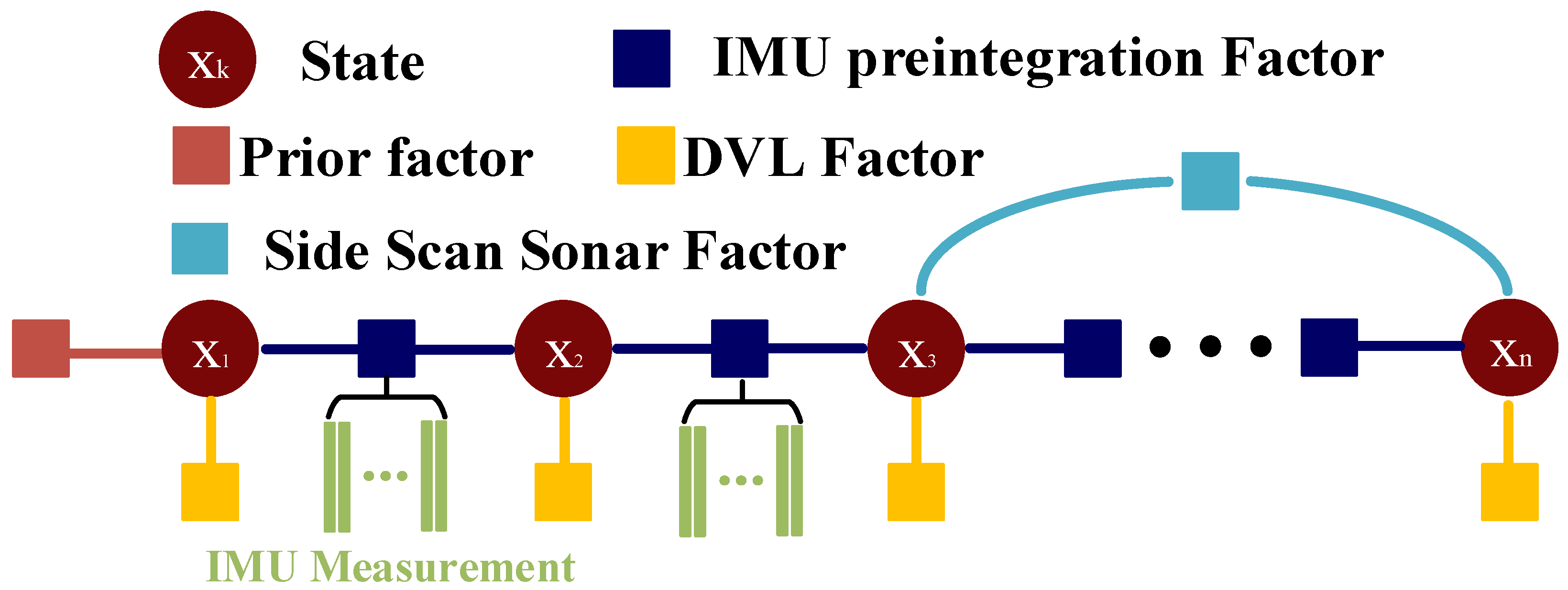
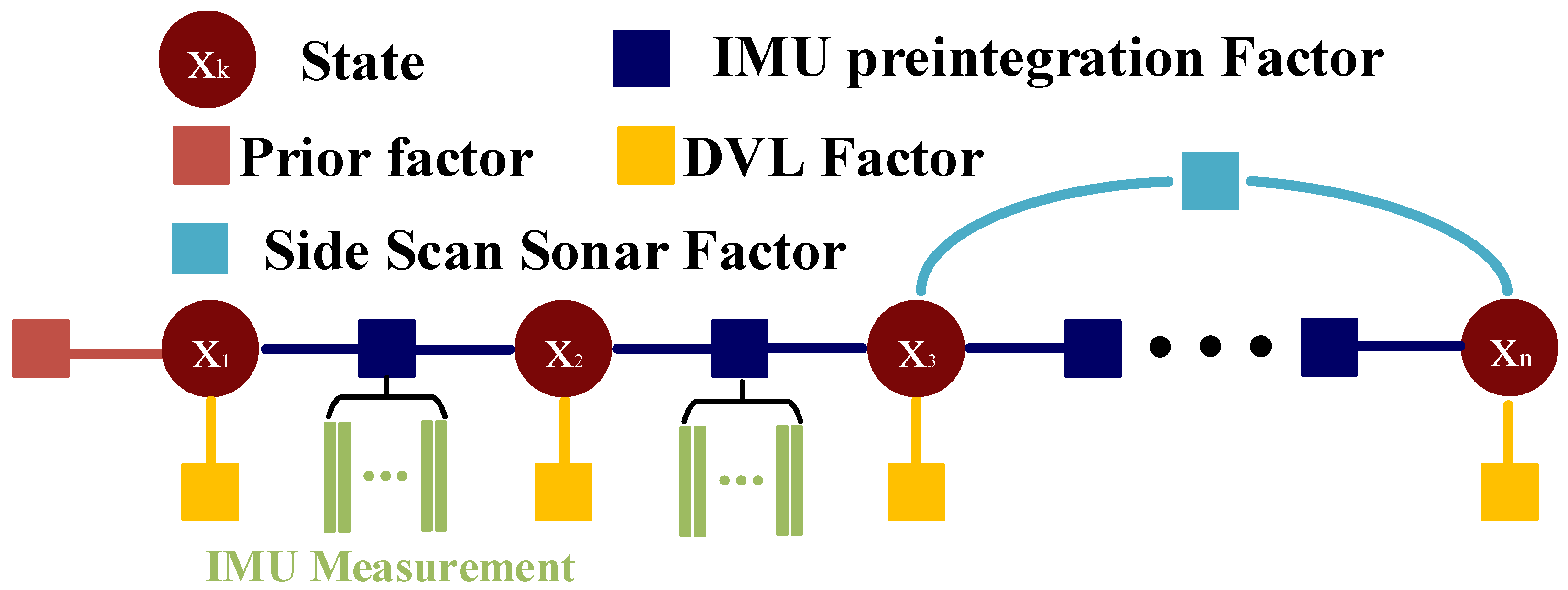
4.1. Formulation of FGO
4.2. The Improved IMU Pre-Integration Model
4.2.1. Attitude Updating and Attitude Pre-Integration
4.2.2. Velocity Updating and Velocity Pre-Integration
4.2.3. Position Updating and Position Pre-Integration
4.3. Residuals and Jacobian Matrix of SINS/DVL/SSS Integration
4.4. Jacobian Matrix
5. AUV Marine Experiment
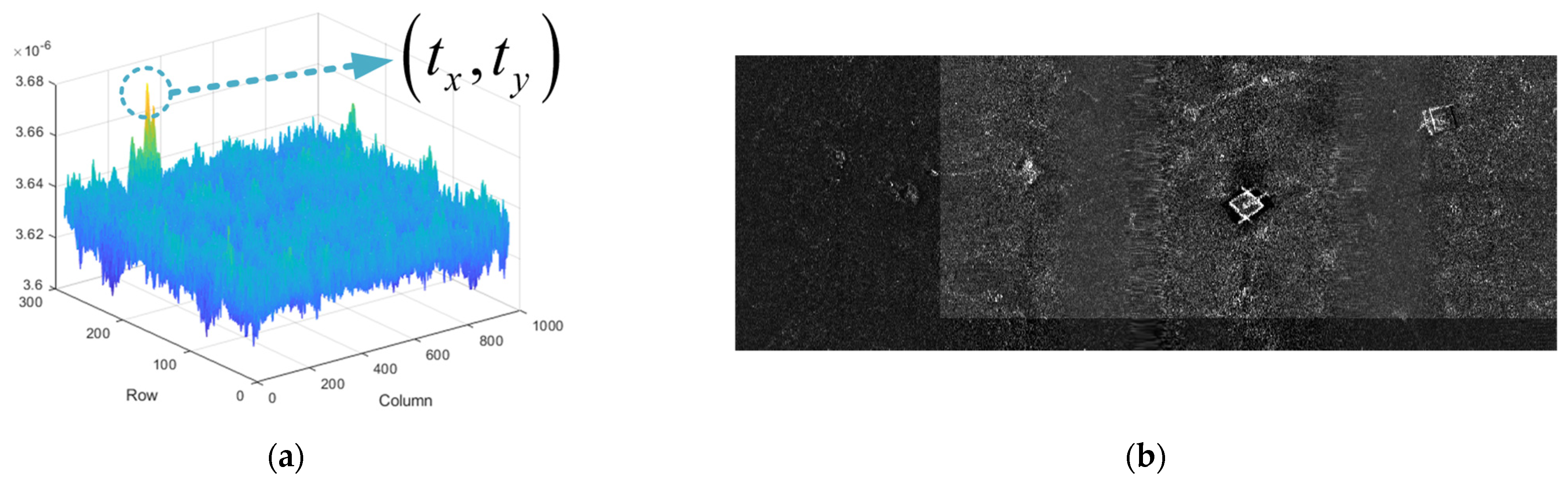
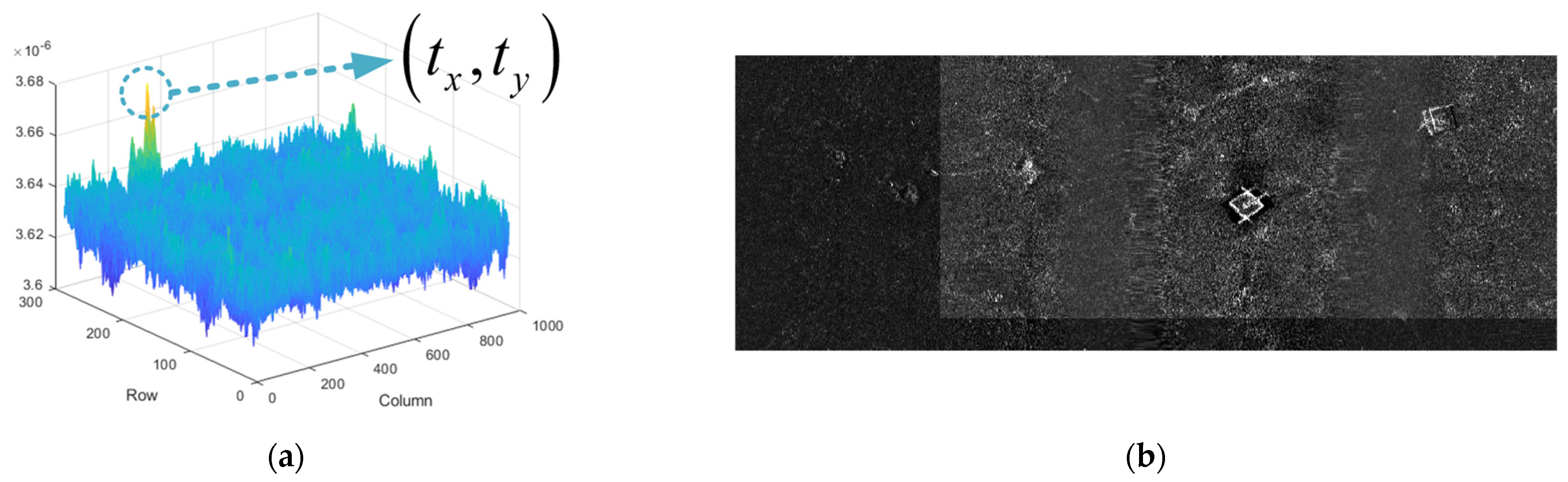
5.1. Experimental Outcomes of Image Registration
- Due to the underwater acoustic noise, the conventional registration method based on features is unable to accomplish the task.
- At the same time, by employing a Fourier-based registration method, the AUV’s relative position measurement at two passes through the same location can be obtained from paired SSS images.
5.2. Setup for AUV’s Marine Experiments
5.3. Experimental Results of FGO-Based Navigation
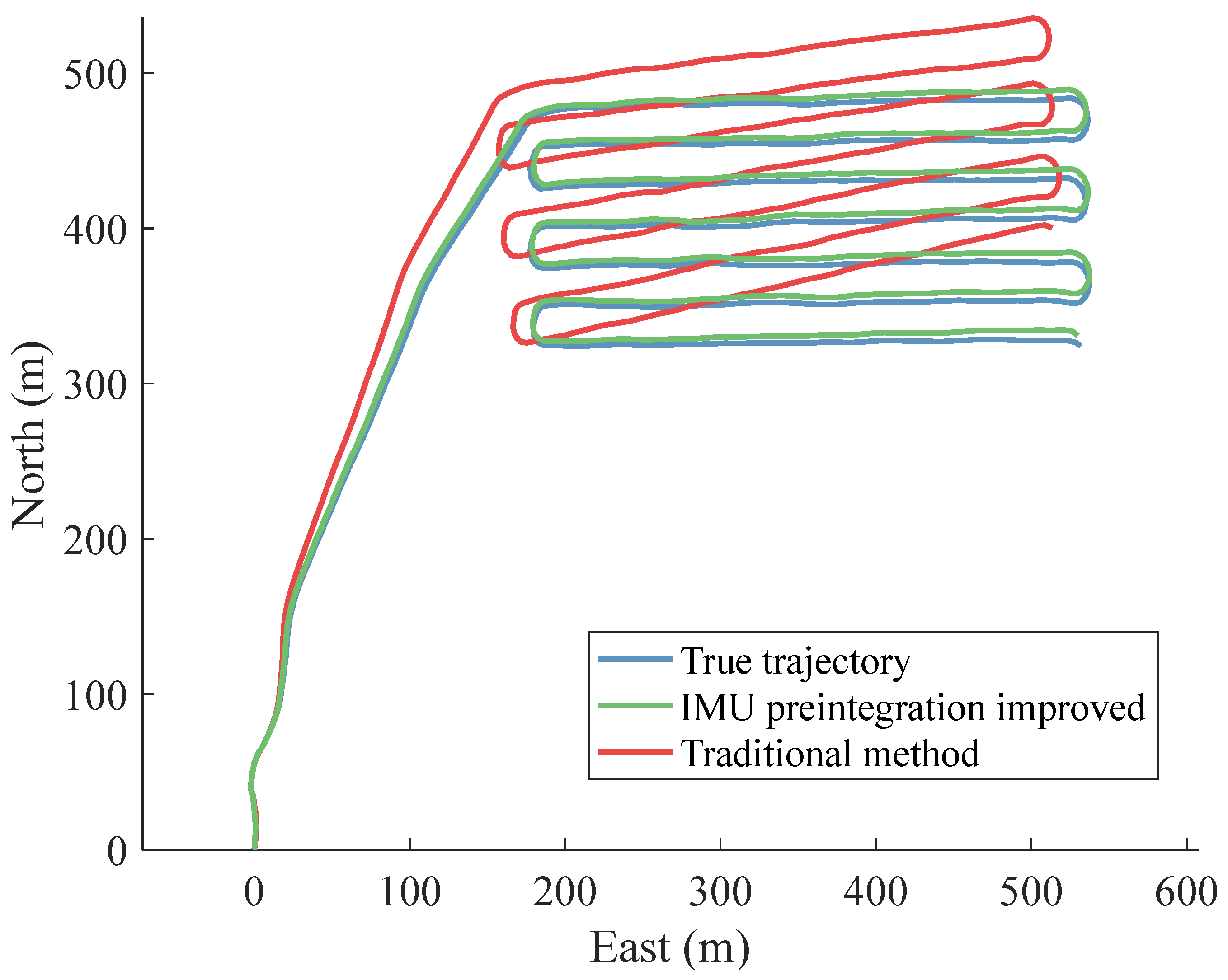
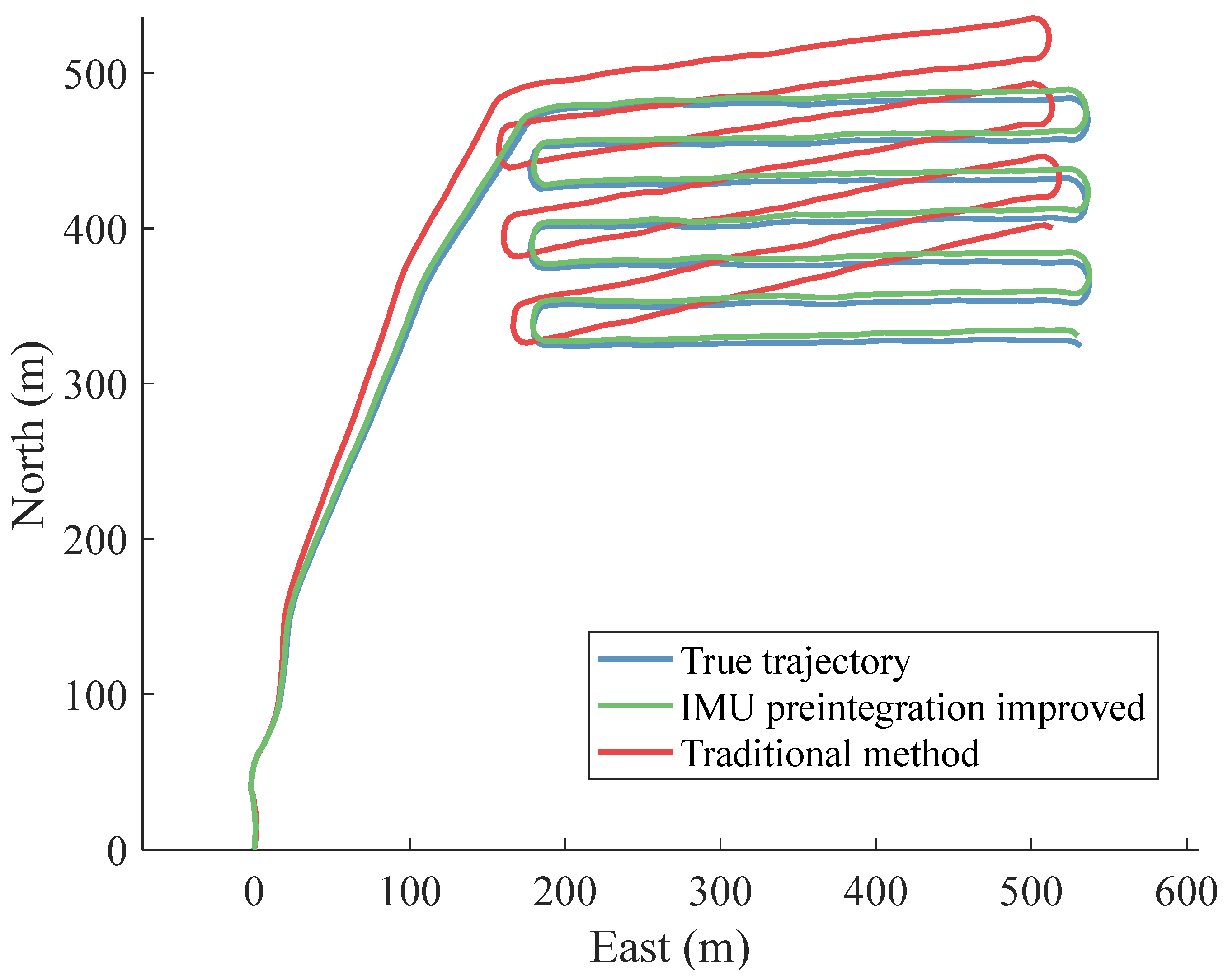
5.3.1. The Verification of the Improved Pre-Integration Method
- The traditional FGO-based SINS/DVL integration navigation method, with an additional 3 degrees of initial heading error;
- The proposed IMU pre-integration improved the FGO-based SINS/DVL method, also with an additional 3 degrees of initial heading error.
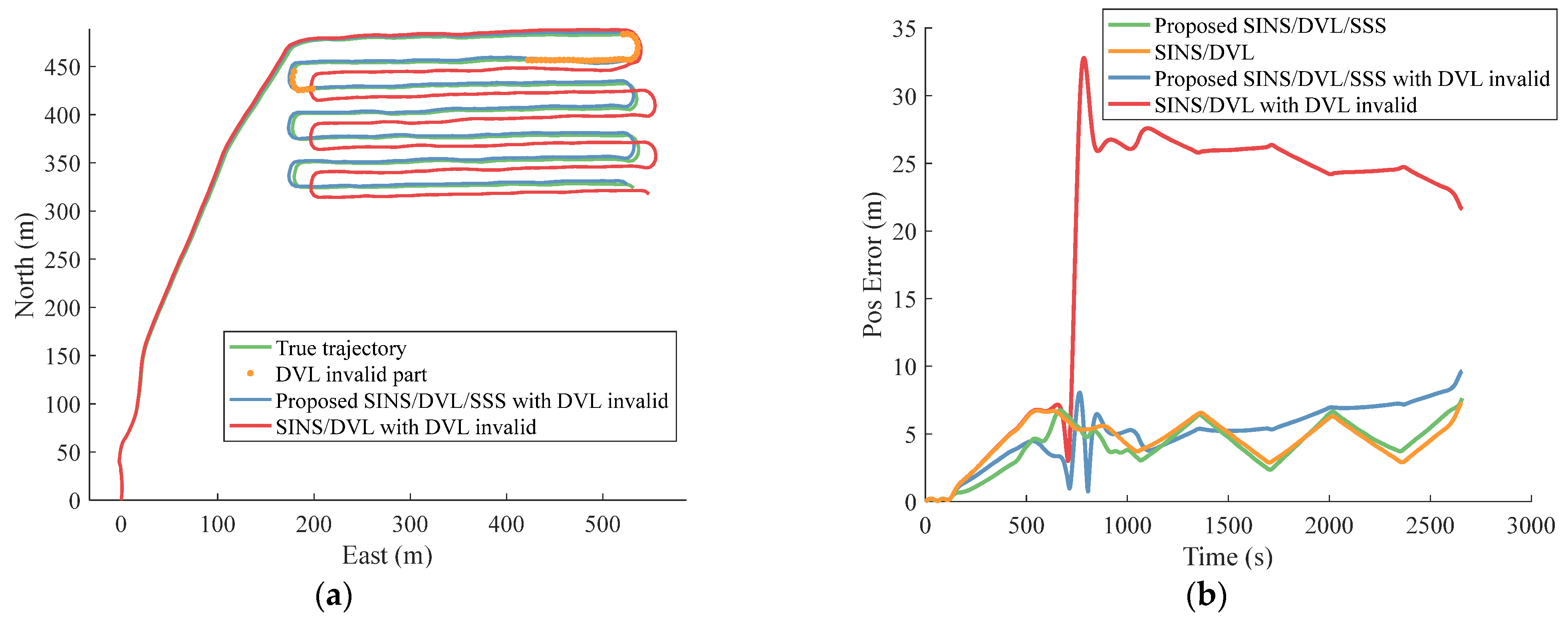
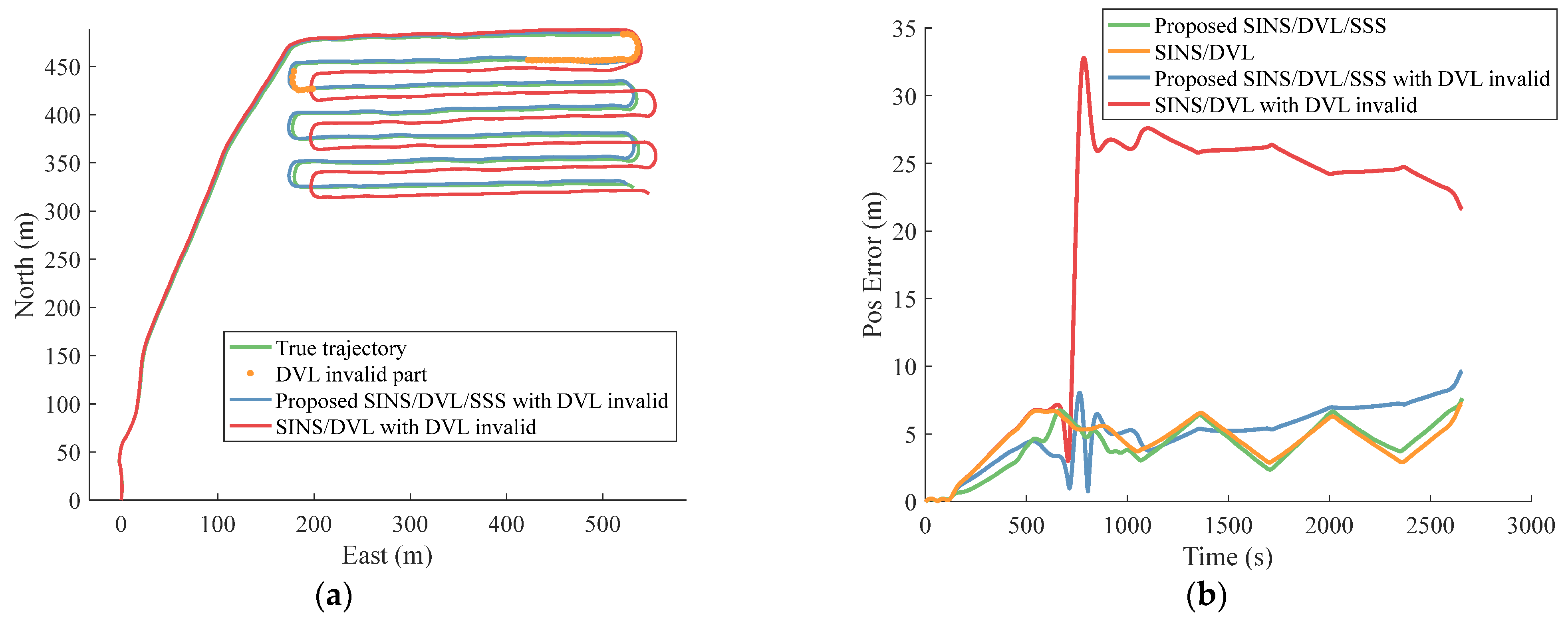
5.3.2. The Verification of the SSS Integrated Navigation Method
- Proposed SINS/DVL/SSS FGO-based method tested on original data.
- SINS/DVL FGO based method tested on original data.
- Proposed SINS/DVL/SSS FGO-based method tested with partial DVL failure.
- SINS/DVL FGO based method tested with partial DVL failure.
- Unlike the traditional pre-integration methods, the improved IMU pre-integration method considered the Earth’s rotation and thus can utilize the Coriolis effect to correct heading errors, making the system more stable against initial heading errors.
- Compared to traditional FGO-based SINS/DVL integrated navigation, the proposed integrated navigation with the addition of SSS position measurements could reduce the system’s divergence rate, particularly when the DVL data is partially unavailable, thereby enhancing the system’s robustness.
6. Conclusions
- Due to the dullness of underwater acoustic images and the influence of observation angles, traditional feature-based image registration methods cannot obtain relative positions. The Fourier-based registration method is not limited to isolated features but uses information from the entire image for registration, achieving better results and successfully extracting relative positional information in most cases.
- Compared to the commonly used IMU pre-integration method, the high-accuracy IMU pre-integration proposed in the paper can better utilize the IMU with low bias instability to correct the attitude errors with the Earth’s rotation.
- The method proposed to incorporate SSS as a position reference into the SINS/DVL navigation system not only supplements the position measurements for long-term underwater navigation of AUVs but also maintains the stability of the system’s position estimation in the event of DVL failure, thus improving the stability of the navigation system.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ånonsen, K.B.; Mandt, M. Water Referenced Doppler Velocity Aiding for AUV Navigation. In Proceedings of the OCEANS 2022, Hampton Roads, VA, USA, 17–20 October 2022; pp. 1–8. [Google Scholar]
- Snyder, J. Doppler Velocity Log (DVL) Navigation for Observation-Class ROVs. In Proceedings of the OCEANS 2010 MTS/IEEE SEATTLE, Seattle, VA, USA, 20–23 September 2010; pp. 1–9. [Google Scholar]
- Zhang, B.; Ji, D.; Liu, S.; Zhu, X.; Xu, W. Autonomous Underwater Vehicle Navigation: A Review. Ocean Eng. 2023, 273, 113861. [Google Scholar] [CrossRef]
- Xu, X.; Gui, J.; Sun, Y.; Yao, Y.; Zhang, T. A Robust In-Motion Alignment Method With Inertial Sensors and Doppler Velocity Log. IEEE Trans. Instrum. Meas. 2021, 70, 1–13. [Google Scholar] [CrossRef]
- Huang, Y.; Zhang, Y.; Li, N.; Wu, Z.; Chambers, J.A. A Novel Robust Student’s t-Based Kalman Filter. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 1545–1554. [Google Scholar] [CrossRef]
- Yao, Y.; Xu, X.; Xu, X.; Klein, I. Virtual Beam Aided SINS/DVL Tightly Coupled Integration Method With Partial DVL Measurements. IEEE Trans. Veh. Technol. 2023, 72, 418–427. [Google Scholar] [CrossRef]
- Wang, D.; Xu, X.; Yao, Y.; Zhang, T.; Zhu, Y. A Novel SINS/DVL Tightly Integrated Navigation Method for Complex Environment. IEEE Trans. Instrum. Meas. 2020, 69, 5183–5196. [Google Scholar] [CrossRef]
- Rypkema, N.R.; Fischel, E.M.; Schmidt, H. Closed-Loop Single-Beacon Passive Acoustic Navigation for Low-Cost Autonomous Underwater Vehicles. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 641–648. [Google Scholar]
- Melo, J.; Matos, A. Survey on Advances on Terrain Based Navigation for Autonomous Underwater Vehicles. Ocean. Eng. 2017, 139, 250–264. [Google Scholar] [CrossRef]
- Rajani, H.; Gracias, N.; Garcia, R. A Convolutional Vision Transformer for Semantic Segmentation of Side-Scan Sonar Data. Ocean Eng. 2023, 286, 115647. [Google Scholar] [CrossRef]
- Tang, Z.; Luo, Z.; Jiang, L.; Ma, G. A Novel High Precision Mosaic Method for Sonar Video Sequence. Multimed. Tools Appl. 2021, 80, 14429–14458. [Google Scholar] [CrossRef]
- Zhang, W.; Zhou, T.; Xu, C.; Liu, M. A SIFT-Like Feature Detector and Descriptor for Multibeam Sonar Imaging. J. Sens. 2021, 2021, 8845814. [Google Scholar] [CrossRef]
- Barfoot, T.D. State Estimation for Robotics, 1st ed.; Cambridge University Press: Cambridge, UK, 2017; ISBN 978-1-107-15939-6. [Google Scholar]
- Xu, Y.; Zheng, R.; Zhang, S.; Liu, M. Robust Inertial-Aided Underwater Localization Based on Imaging Sonar Keyframes. IEEE Trans. Instrum. Meas. 2022, 71, 1–12. [Google Scholar] [CrossRef]
- Franchi, M.; Ridolfi, A.; Pagliai, M. A Forward-Looking SONAR and Dynamic Model-Based AUV Navigation Strategy: Preliminary Validation with FeelHippo AUV. Ocean Eng. 2020, 196, 106770. [Google Scholar] [CrossRef]
- Qin, T.; Li, P.; Shen, S. VINS-Mono: A Robust and Versatile Monocular Visual-Inertial State Estimator. IEEE Trans. Robot. 2018, 34, 1004–1020. [Google Scholar] [CrossRef]
- Shan, T.; Englot, B.; Meyers, D.; Wang, W.; Ratti, C.; Rus, D. LIO-SAM: Tightly-Coupled Lidar Inertial Odometry via Smoothing and Mapping. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October 2020; pp. 5135–5142. [Google Scholar]
- Zhou, H.; Ye, X. A Unified Initial Alignment Method of SINS Based on FGO. IEEE Trans. Ind. Electron. 2023, 70, 11795–11803. [Google Scholar] [CrossRef]
- Forster, C.; Carlone, L.; Dellaert, F.; Scaramuzza, D. On-Manifold Preintegration for Real-Time Visual-Inertial Odometry. IEEE Trans. Robot. 2017, 33, 1–21. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description |
|---|---|
| n | Ideal local level navigation frame |
| b | Body frame |
| e | Earth frame |
| i | Nonrotating inertial frame |
| Parameters | Gyro Bias Stability | Gyro Random Walk | Gyro Scale Factor Accuracy | Accelerator Monthly Bias Repeatability | DVL Long Term Accuracy |
|---|---|---|---|---|---|
| Value | <0.01°/h | <0.001°/√h | <10 ppm | <20 μg | 0.5% ± 0.1 cm/s |
| Condition\Method | Average Positioning Error of SINS/DVL (m) | Average Positioning Error of SINS/DVL/SSS (m) |
|---|---|---|
| DVL all valid | 4.4938 | 4.1521 |
| DVL partially invalid | 19.5069 | 5.0280 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, L.; Gao, Y.; Guan, L. Optimizing AUV Navigation Using Factor Graphs with Side-Scan Sonar Integration. J. Mar. Sci. Eng. 2024, 12, 313. https://doi.org/10.3390/jmse12020313
Zhang L, Gao Y, Guan L. Optimizing AUV Navigation Using Factor Graphs with Side-Scan Sonar Integration. Journal of Marine Science and Engineering. 2024; 12(2):313. https://doi.org/10.3390/jmse12020313
Chicago/Turabian StyleZhang, Lin, Yanbin Gao, and Lianwu Guan. 2024. "Optimizing AUV Navigation Using Factor Graphs with Side-Scan Sonar Integration" Journal of Marine Science and Engineering 12, no. 2: 313. https://doi.org/10.3390/jmse12020313
APA StyleZhang, L., Gao, Y., & Guan, L. (2024). Optimizing AUV Navigation Using Factor Graphs with Side-Scan Sonar Integration. Journal of Marine Science and Engineering, 12(2), 313. https://doi.org/10.3390/jmse12020313