1. Introduction
Underwater acoustic sensor networks (UASNs) have been deployed to acquire various data of interest beneath the water surface for decades [
1,
2]. In recent years, data-driven approaches have been widely adopted in acoustic channel estimation, geoacoustic inversion, and so on, causing a geometric growth in the underwater data volume [
3,
4]. This fact requires the advancement of an efficient and secure medium access control (MAC) mechanism to collect the data from the UASNs.
The current efforts on the MAC design in underwater acoustic networks (UANs) are mainly focused on improving access efficiency from the perspective of time division, since the narrow available bandwidth and the harsh underwater acoustic channel limit the use of frequency division and code division [
5,
6]. The challenge is basically attributed to the non-negligible propagation delay caused by the relatively slow propagation speed, which is about 1500 m/s and five orders slower than the radio wave propagated through the air [
7]. This results in space–time coupling access in UANs and makes the MAC more complicated than in terrestrial radio networks (TRNs) [
8,
9]. On the one hand, since the spatial distance from its sender to its receiver jointly decides the packet’s arrival time, solely separating the sending times at the sending sides cannot guarantee their packets are collision-free at the receiving sides. On the other hand, the extra spatial factor provides more opportunities to align designated packets and aggregate interference (The other arriving packets.) at each node [
10]. It has been proven that the upper-bound of normalized throughput for mesh-connected UANs is
, which is greater than can be achieved in TRNs [
11]. For the star-connected UANs, allocating the sending times of senders according to their spatial distances to the common receiver to achieve perfect receiving-alignment in the receiver can reach the upper-bound of normalized throughput, which is alwaysone [
8].
Two techniques have been used to promote data confidentiality in UANs, including encryption and physical layer security (PLS) [
12]. Encryption uses a secret key to encrypt the message before data dissemination. The idea of the PLS approach is to utilize the random nature of wireless channels to promote the secrecy rate between legal users. Unfortunately, the cost and challenge are heavier for implementing encryption and the PLS in UANs than in TRNs. First, a portion of limited bandwidth is taken for regular updates of the secret key, not for data transmission [
13,
14]. Second, the security rate of the PLS approach is directly related to the estimation accuracy on the dynamic multi-path acoustic channel and underwater noise [
15,
16]. As it stands currently, both of these methods are decoupled from the MAC layer in UANs.
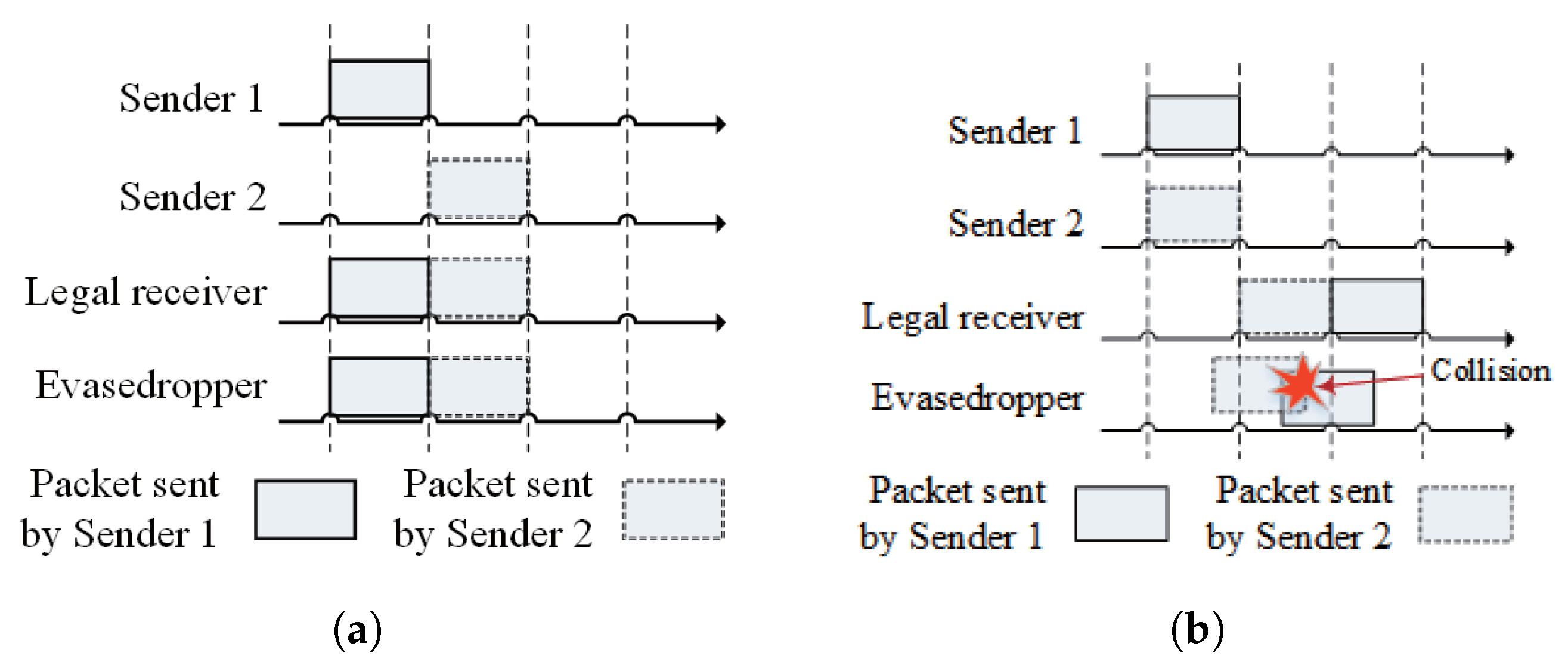
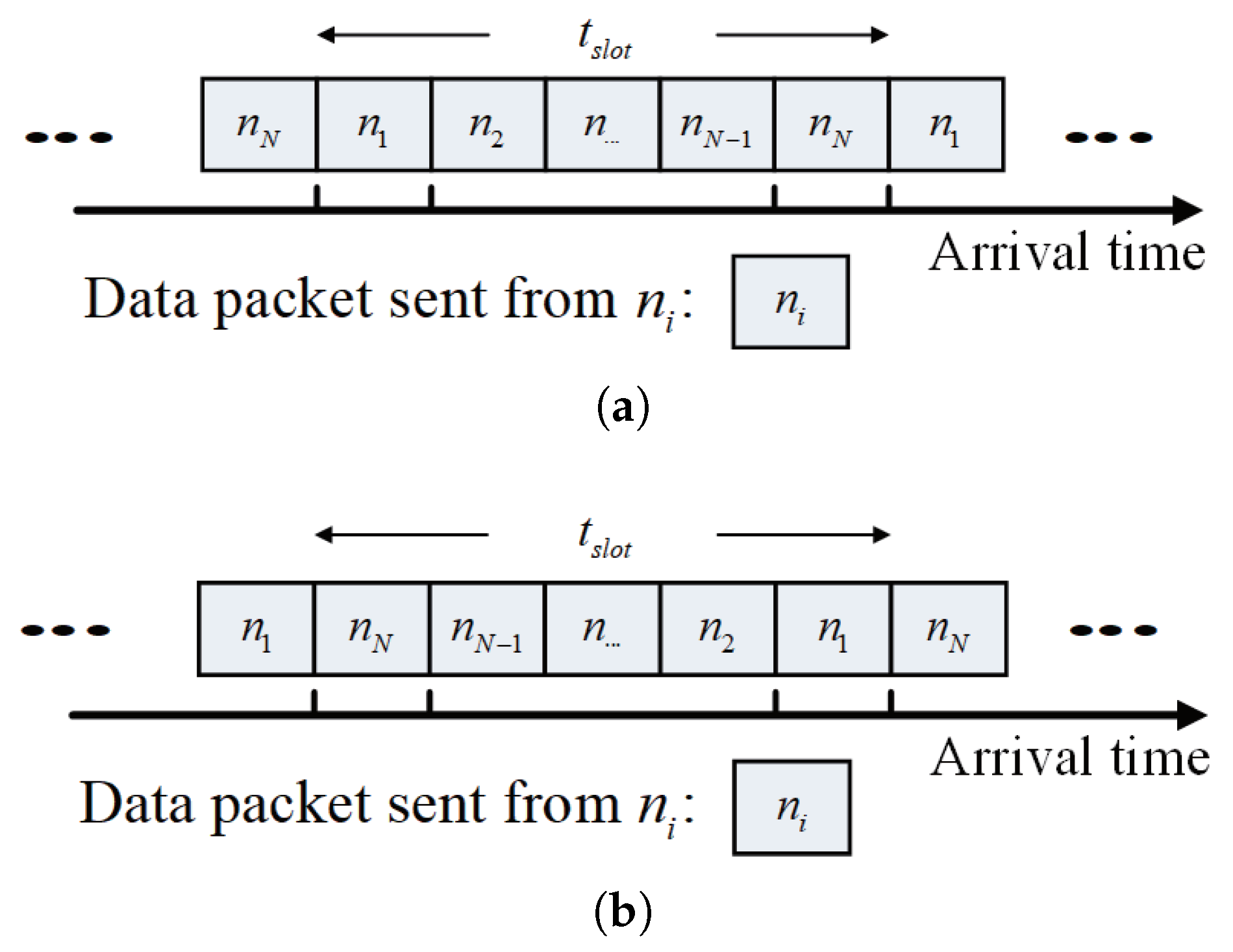
Owing to the open nature of wireless communication, a wireless signal can be overheard by all the nodes within the coverage of its sender. Since the arrival time is only determined by the sending time in TRNs, as shown in
Figure 1a, the collision-free multiple access to the intended receiver also means collision-free multiple access to any other unintended nodes within the coverage of the senders. On the contrary, due to the space–time coupling characteristic, the well-scheduled sending times toward the intended receiver are unlikely to match with the relative distances toward the unintended receiver. As illustrated in
Figure 1b, the packets can only be successfully received by the legal receiver and collide at the eavesdropper. Therefore, the space–time coupling characteristics of UANs naturally have opportunities for anti-eavesdropping. In this sense, it is recommended to integrate a receiving-aggregation design that creates heavy packet collisions at unintended receivers while ensuring collision-free access for intended receivers in UANs.
Actually, the adversary receiver is also incentivized to exploit the space–time coupling access to maximize the number of packets it can successfully receive without collision. A MAC protocol without anti-eavesdropping concerns might create some areas where numerous or even all the packets can be successfully received without collision. The eavesdropper is eager to acquire the spatial information and the legal nodes’ sending times to find such eavesdropping areas to facilitate its eavesdropping performance. Therefore, it is required to carefully design the MAC protocol and expose as little spatial information as possible.
This paper aims to exploit the space–time coupling characteristic to achieve both efficient and secure MAC while a group of linearly deployed underwater sensor nodes report their data to a single collector. The linear and grid topology constructed by multiple linear node chains are the most-common patterns and are widely applied in UANs [
17,
18,
19]. As a result, the network performance of linearly deployed UANs still attracts the interest of some researchers.
The contributions of this paper are summarized as follows:
Anti-eavesdropping opportunities of space–time coupling access: The anti-eavesdropping opportunity and the rest of the risk of being eavesdropped in the MAC layer of UANs are first discussed in this paper. This anti-eavesdropping capability is achieved by causing continuous packet collisions on unintended receivers through MAC layer design. As a result, there are no additional hardware requirements compared to the existing MAC in UANs. It is expected to encourage the study of integrating and promoting the anti-eavesdropping ability while achieving efficient MAC in UANs.
Eavesdropping from linearly deployed sensor nodes: For a star-connected network formed by a group of linearly deployed sensor nodes and a single receiver, we find an eavesdropping ring centered around the node chains, where all the packets sent by the sensor nodes can be successfully received. The typical receiving-alignment-based MAC (TRAS-MAC) needs to allocate and notice the sending time of each sensor node one by one. In this case, the spatial information, i.e., relative distances among sensor nodes to the receiver, can be easily acquired by the adversary eavesdropper. If the eavesdropper acquires the positions of these anchored sensor nodes, the eavesdropper can locate the eavesdropping ring and steal all the packets. The anti-eavesdropping can be shrunk into a single point when the legal receiver is also located inside the same one-dimensional space where sensor nodes are located, which essentially limits the possibility of perfect eavesdropping. Moreover, we prove that assigning the distance-dependent arrival order of packets at the legal receiver, i.e., closer distance, earlier arrival and farther distance, earlier arrival, perform better in anti-eavesdropping than using random order. We also find that an even number of sensor nodes causes more collision in the eavesdropper than an odd number of sensor nodes while using a distance-dependent arrival order of packets.
Anti-eavesdropping MAC design: Since the spatial information is still exposed to the eavesdropper and can precisely locate the legal receiver in the one-dimensional space, the TRAS-MAC must be improved. We propose a slotted- and receiving-alignment-based MAC protocol (SRAS-MAC) to achieve safe and efficient medium access from linearly deployed sensor nodes to a single receiver. The SRAS-MAC chose a proper packet size according to the network information, e.g., spacing distance between two neighboring sensor nodes, amount of sensor nodes, and so on, to achieve perfect receiving-alignment and attain maximal capacity. Since the sending time remains the same and periodic among all sensor nodes, the eavesdropper cannot deduce spatial information from it. Furthermore, the SRAS-MAC provides a group of optional locations for the legal receiver, each of which can achieve similar network and anti-eavesdropping performance. Therefore, the proposed SRAS-MAC can also protect the location privacy of the legal receiver since the adversary eavesdropper cannot distinguish where the legal receiver is located.
3. The Security Risks in Linearly Deployed and Star-Connected Networks
This section discusses some emerging security risks while using the TRAS-MAC protocol. One is the existence of eavesdropping positions where all packets can be successfully eavesdropped on, and another is exposing the collector’s location.
3.1. The Eavesdropping Risk
3.1.1. The Eavesdropping Ring
The collector can achieve the maximal throughput at arbitrary locations while adopting the TRAS-MAC protocol described in
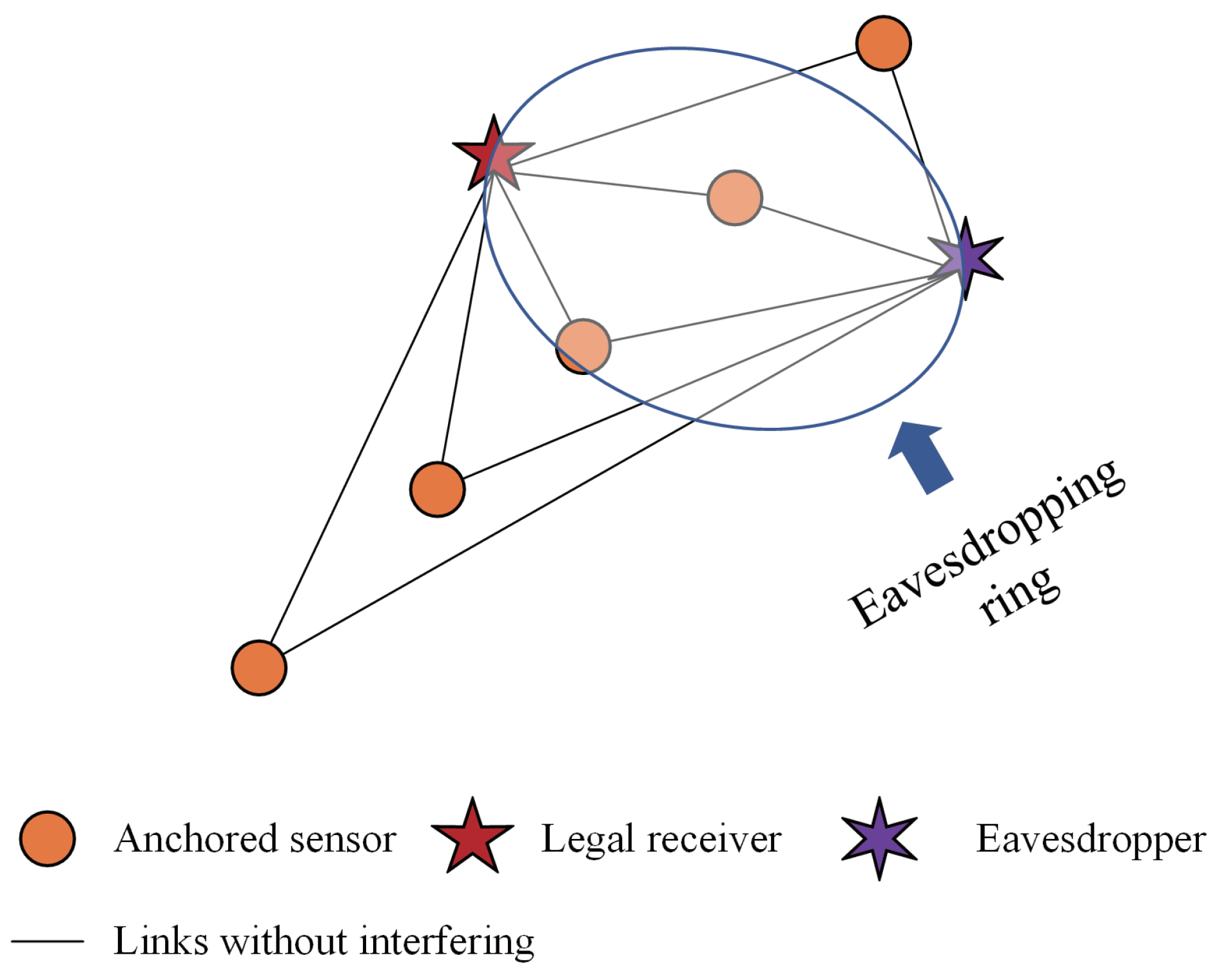
Section 2.2. However, if the collector is located outside the one-dimensional space of the sensor nodes’ chain, an eavesdropping ring centered on these linearly deployed sensor nodes exists, as illustrated in
Figure 8. The radius of the eavesdropping ring is equal to the vertical distance from the legal receiver to the sensor node chain. Owing to the symmetry, the distance from an arbitrary position in the eavesdropping ring to sensor node
also equals
. Therefore, the receiving-alignment toward the legal receiver also means receiving-alignment toward any unintended receiver located in the eavesdropping ring.
In this sense, if the collector’s location is exposed to the eavesdropper, the adversary eavesdropper can easily find the eavesdropping ring and move to any position in there to steal all the reported data from the sensor nodes successfully.
It is noted that the channel is occupied by the two-way handshake between the collector and a sensor node during the first notification stage. In this case, unfortunately, an adversary eavesdropper can successfully receive the broadcasting 1st-Ini packet and decode the scheduled sending time of the sensor node. According to (
3), the distance difference for the sequential sensor nodes can be deduced through the sending time
as follows:
According to localization theory, the eavesdropper can obtain the eavesdropping ring centered around the sensor node chain based on the time difference of arrival (TDOA) information in (
4) and the location of anchored sensor nodes. In the worst case, if the locations of anchored sensor nodes have been acquired by the eavesdropper, the eavesdropper can deduce the eavesdropping ring, move there, and eavesdrop all the reported data successfully.
3.1.2. Solution and Analysis toward Anti-Eavesdropping
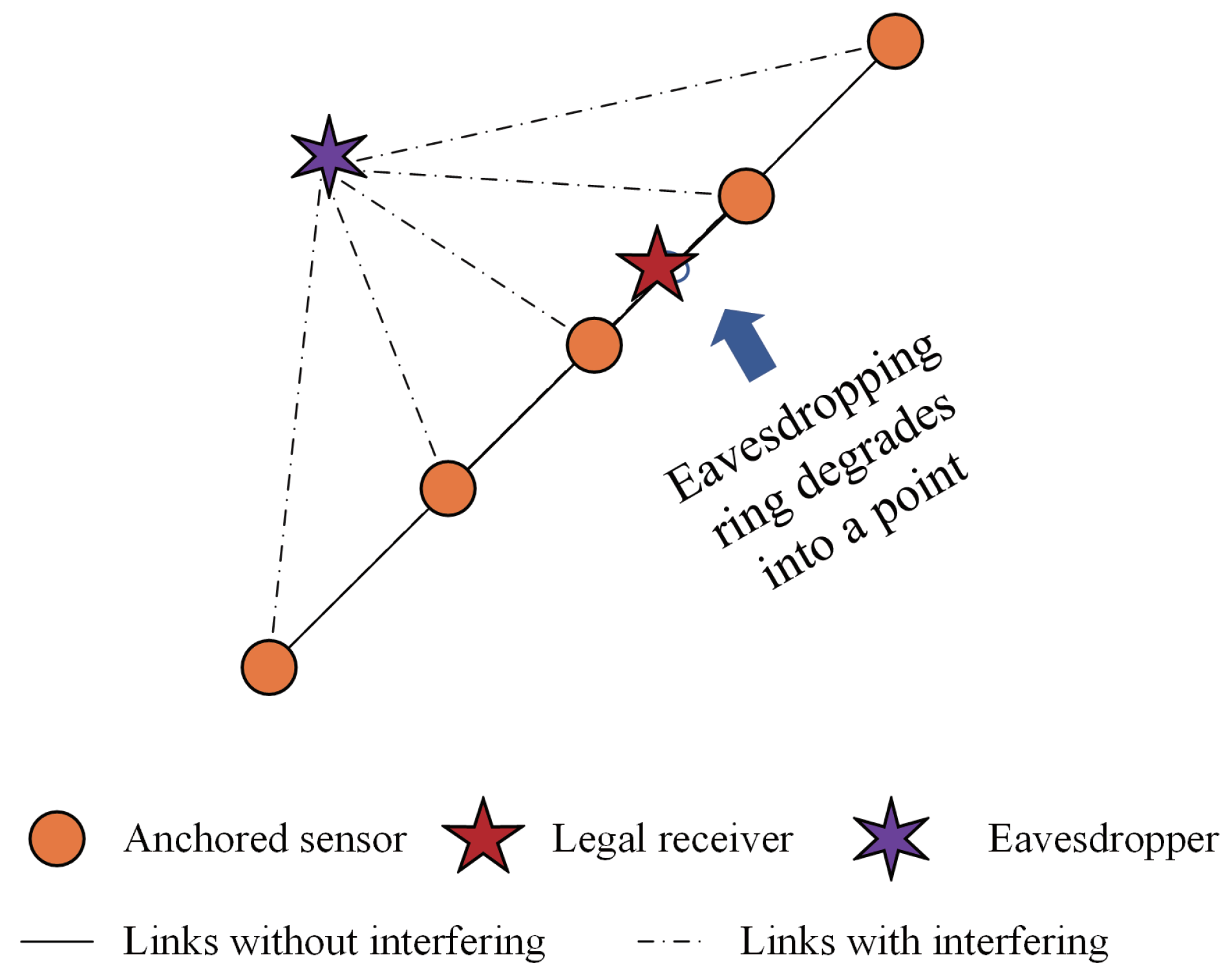
It is noted that the radius of the eavesdropping ring is the vertical distance from the legal collector to the sensor node chain. Therefore, moving the collector into the one-dimensional space of the sensor node chain can force the eavesdropping ring to degrade into a single point, which is exactly the collector’s location. As shown in
Figure 9, it is impossible for the eavesdropper to find a location that can successfully receive all the reported data without collision.
As the collector and the sensor nodes are located in the same one-dimensional space, the distance
can be expressed as
where
denotes the distance from the collector to
,
, and we have
.
Actually, as if the eavesdropper is also located inside the one-dimensional space of the sensor nodes chain, we have the following findings regarding the anti-eavesdropping ability. First, there is the the impact of the arrival order.
Proposition 1. The CD-EA and FD-EA orders illustrated in Figure 5 outperform the other arrival orders in anti-eavesdropping. Proof. For these two arrival orders, i.e., CD-EA and FD-EA, the senders of two arbitrary neighboring arrival packets are located on two different sides of the receiver. Therefore, as the packet arrives in the eavesdropper, which is also located in the one-dimensional chain, continuous collisions are supposed to happen between two arrival packets, and the proof is completed. □
Second, there is the impact of the parity of the value of N.
Proposition 2. The even network can cause more collisions in the eavesdropper than the odd network when using CD-EA or FD-EA orders.
Proof. As we know from Proposition 1, continuous collisions are supposed to happen between two arrival packets while using CD-EA or FD-EA orders. In this sense, all the reported packets will collide in the eavesdropper as N in an even value. However, there is the possibility that one packet during a transmission period does not interfere with the other arrived packets as N is an odd value, and the proof is completed. □
In this sense, the adversary is better off deploying multiple eavesdroppers in different locations outside the one-dimensional chain to increase its eavesdropping probability.
3.2. Exposure of the Collector’s Location
As discussed above, the eavesdropper cannot precisely locate the collector’s location in the eavesdropping ring if the collector is outside the one-dimensional space formed by the sensor node chain. Although moving the collector into the one-dimensional space can highly promote the anti-eavesdropping ability, the position of the collector will be exposed to the eavesdropper subsequently.
The exposure of the collector’s location can be attributed to two main reasons. First, the floor acquisition of the channel during the notification stage enables the eavesdropper to receive all the 1st-Ini packets successfully. Second, the relative spatial information is embedded inside the transmission strategies and broadcast through the 1st-Ini packet. On these bases, if the location of the anchored sensor nodes is exposed to the eavesdropper, the one-dimensional location of the collector can be easily deduced. Then, the collector is directly threatened by tracking or even an attack.
The slotting technique is promising to solve the exposure problem. On the one hand, when using slotted accessing, sensor nodes only need to transmit their collected data at the beginning of each slot without any additional activities required. Therefore, the collector only needs to broadcast the common transmission strategy (i.e., slot length and the packet duration) instead of notifying each sensor node of their specific transmission time. On the other hand, the slotting technique can erase the relative distance information from the broadcast transmission strategies, which protects the location privacy of the collector.
However, achieving receiving-alignment at the receiver is more challenging when using the slotting technique, as will be discussed in the next section.
4. SRAS-MAC: Slotted- and Receiving-Alignment-Based Scheduling MAC
In this section, we first study achieving the receiving-alignment in the receiver while using the slotting technique and further design the SRAS-MAC. Then, we discuss why the proposed SRAS-MAC can protect the location privacy of the collector. We further give an overview of the proposed SRAS-MAC protocol.
4.1. Spatial Reuse through Slotting Accessing
Let
denote the slot length, which is given as
where
denotes the maximal propagation delay from the sensor nodes to the collector and
is a guard coefficient, which satisfies
. In a star-connected network, collision-free regions (CFRs) exist when the slot length is greater than two-times the packet duration [
9]. In this sense, the slot length setting should satisfy the following condition so as to achieve spatial reuse:
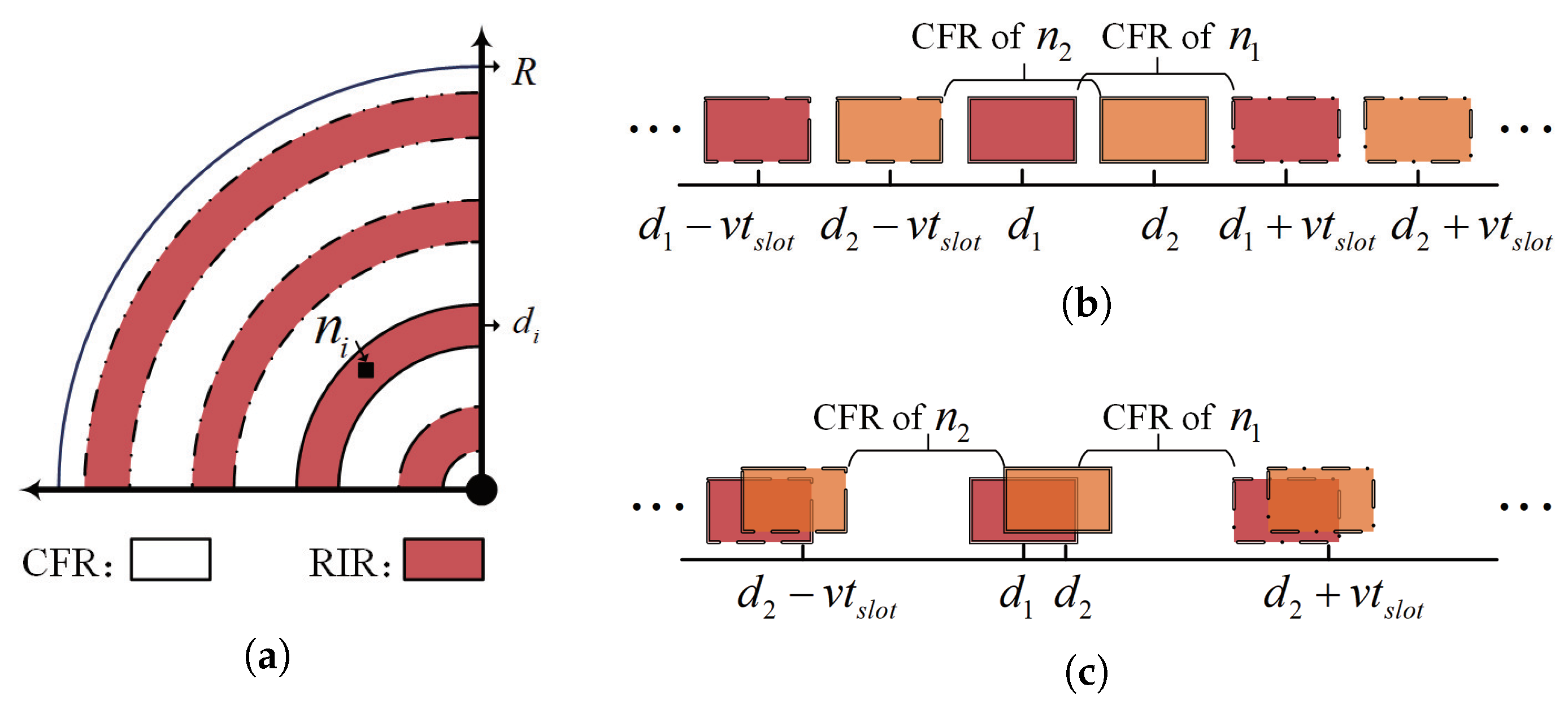
As shown in
Figure 10a, the CFRs corresponding to a tagged sender are a group of concentric annuli centered on the receiver and inside the coverage of the receiver. It is noted that, except for the CFRs at two ends, the width of each CFR is equal to
, and the locations of the corresponding CFRs of each sender are determined by
and
.
We take two sensor nodes (i.e.,
,
) as examples to discuss how to exploit the CFRs so as to achieve spatial reuse while using the slotting technique. We assumed
and
are fully loaded and going to access the channel at each slot. As shown in
Figure 10b,
and
are located at the CFRs of each other. In this case, the simultaneously transmitted packets from
and
will not collide at the receiver, which achieves spatial reuse. On the contrary, it is also possible that these two nodes keep interfering with each other because they are located outside each other’s CFRs, as shown in
Figure 10c.
The examples illustrated in
Figure 10 suggest an opportunity to achieve spatial reuse by adjusting the relative distance difference
among the senders to the receiver. Since the sensors are anchored, it is better to adjust the relative distances from the receiver side. This inspired us to find suitable locations for the collector where spatial reuse among sensor nodes can be achieved. At the same time, a corresponding design of the time slot is also required to achieve optimal channel utilization.
4.2. Design of SRAS-MAC
Let
k denote the order of the slots and
denote the beginning time of the
k-th slot, which can be expressed as
Since the sender can only send a data packet at the beginning of each slot, each sender at most has one packet arrive at the receiver during a period equal to .
Proposition 3. Supposing node sends a packet at slot k, for the other packets arriving at the receiver from time till time , their sending slot is before slot .
Proof. Assuming a packet is sent from
at
slot, its arrival time satisfies
where
and
. The left side of (
9) is always satisfied. However, based on the right side of (
9), the difference between the sending slot and sending position should satisfy the condition as
The upper-bound and lower-bound of the two sides in (
10) are given as follows:
Since the condition in (
11) contradicts (
10), the proof is completed. □
Let
denote the sending slot difference between
and the other nodes. According to (
8) and Proposition 3,
can be expressed as
Based on (
12), taking
as the reference node, the distance
can be transformed into
as follows:
Using the transformed distance
in (
13), we only need to solve the scheduling problem within one slot. The transformed
is the arrival time of those packets in the slot. Similar to the protocol model shown in (
2), based on the transformed distance (
13), the collision-free condition in a slot can be written as follows:
It is noted that, for arbitrary two nodes
j and
k that satisfy
, it does not mean
.
As shown in Equations (
12) and (
13), given the slot length, adjusting the collector position will change the arrival order of packets sent by sensor nodes. On the contrary, we can also first select an arrival order of packets (e.g.,
) to satisfy (
14) and, then, try to find an achievable location for the collector that satisfies the selected arrival orders. Furthermore, in order to achieve maximal throughput, we want to find a perfect location for the collector under the minimum slot length.
Since all the senders periodically send their packets with interval
,
N data packets at most are sent to the receiver in
time. Therefore, the minimum slot length is given as follows:
We selected the CD-EA order to achieve receiving-alignment at the receiver since it is proven in Proposition 1 that it can achieve higher anti-eavesdropping ability. The
under CD-EA order can be expressed as follows:
Proposition 4. To achieve the receiving-alignment shown in (16), the distances’ set {, should strictly satisfy Proof. Assuming
, according to (
13), the transformed distance satisfies
which contradicts (
14). Therefore, the proof is completed. □
According to (
5), (
13), and (
16),
should satisfy
where
,
, and
.
Let
denote that
b is divisible by
a. Therefore, the receiving-alignment (
16) is achievable if
satisfies
In (
20) and (
21), it is hard to find the common division of
.
Proposition 5. When is equal to or , the receiving-alignment (16) is achievable if (20) is satisfied. Proof. When
is equal to
, the
can be expressed as follows:
When
is equal to
, the
can be expressed as follows:
In both (
22) and (
23),
always is the division of
. Therefore, in these two positions, the receiving-alignment (
16) can be achieved as long as (
20) is satisfied, which completes the proof. □
Based on Proposition 5 and (
15), in order to satisfy the condition in (
20), we can adjust the packet duration as follows:
where
. Let
B denote the packet size (in Byte), which is determined by
as follows:
where
r denotes the data rate of the acoustic modem (in bit/s).
4.3. Trade-Off between Anti-Eavesdropping and Location Privacy of Collector
Proposition 5 has given two special (i.e., and ) for the receiver that can achieve receiving-alignment using the slotting technique. Due to the symmetry of the topology, four optional locations are available for the collector. In this case, the eavesdropper cannot distinguish which one is the final choice of the collector, and the risk of the location being exposed is reduced from 100% to 25%.
Basically, the greater
leads to the greater
, so we intuitively want to use the greatest
to achieve the highest
. As shown in (
24), the maximal packet duration for SRAS-MAC is achieved by setting
z in 0. However, as the
z was set to 0, we have
, which indicates that the number of available locations is halved into two available locations.
Therefore, a trade-off exists between anti-eavesdropping ability and the location privacy of the collector. If the location privacy of the collector is the primary object,
z is better set to 1, and we have
where the probability of exposing the location of the collector is
. On the contrary, if the confidentiality of the reported data is the primary object,
z is better set to 0, and we have
where the probability of exposing the location of the collector is
.
4.4. The Overview of the SRAS-MAC Protocol
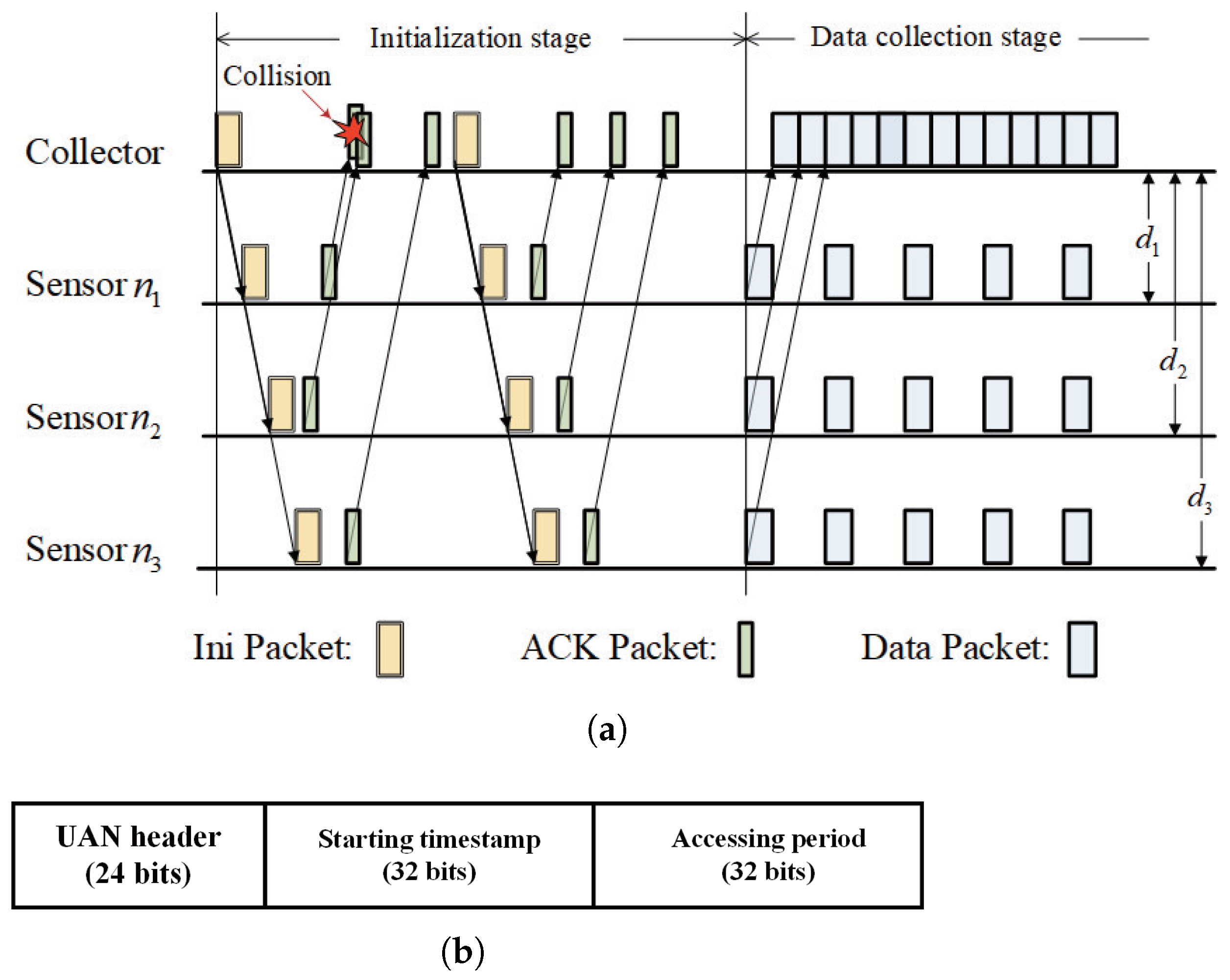
An example of the working process of the SRAS-MAC protocol is illustrated in
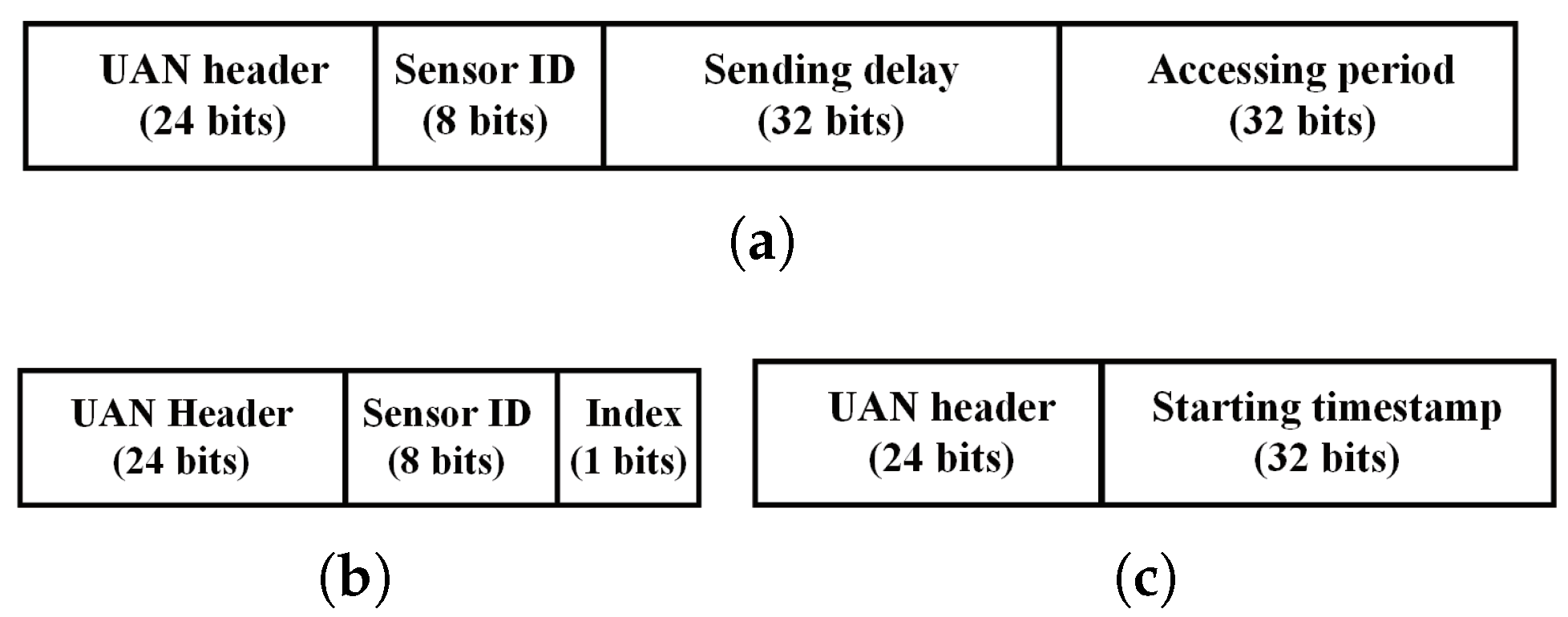
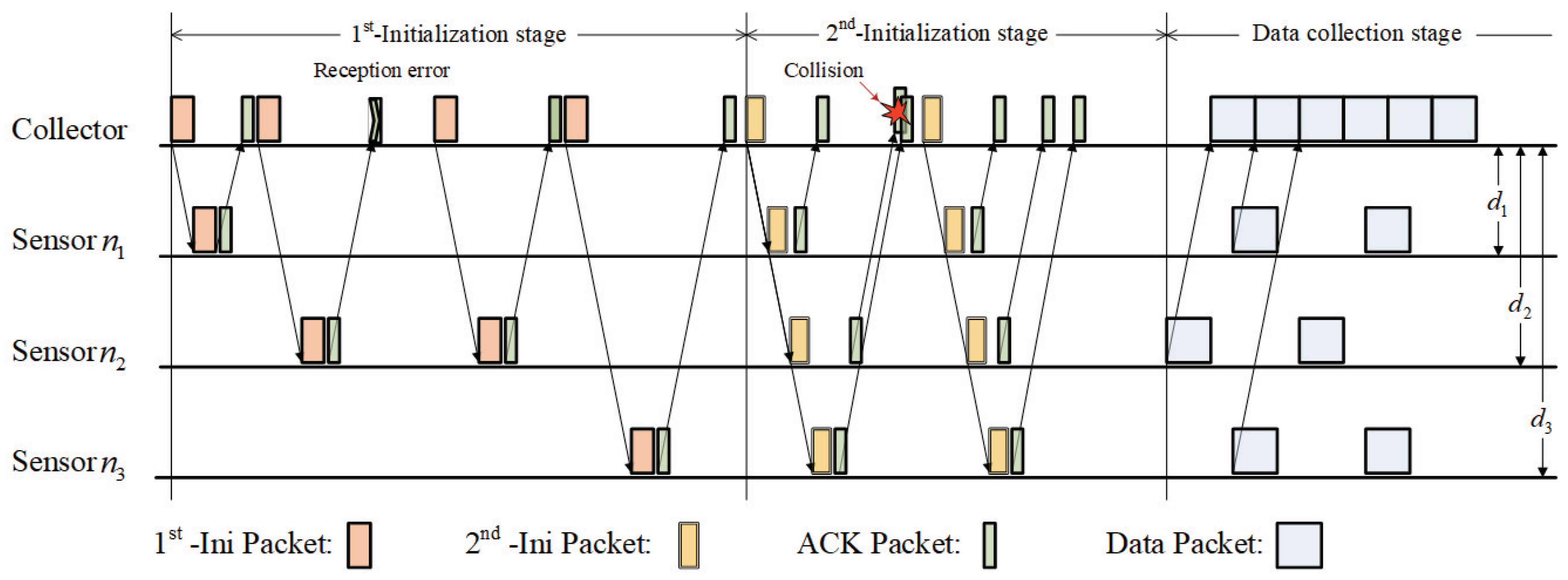
Figure 11a. SRAS-MAC is also initiated by the collector. The collector first derives the packet duration based on (
24). Then, it randomly selects one of the optional positions and moves there. As the collector has settled in the selected location, it activates the notification stage. The collector will assemble the beginning timestamp of the first slot and the accessing period into an Ini packet, whose structure is shown in
Figure 11b.
The Ini packet will be broadcast to all sensor nodes, and the collector will wait for the acknowledgment from the sensor nodes. As a sensor node has successfully received the Ini packet, it will immediately update the accessing strategies and wait for a delay to send its ACK packet back to the collector. Owing to the regularity of these linearly deployed sensor nodes, the sensor node only needs to wait for a time greater than one duration of the Ini packet and can avoid the collision of the ACK packet and the Ini packet in the other sensor.
After waiting for two-times the maximal propagation delay, the collector will check whether it has successfully received the ACK packets from all the sensor nodes. If all the ACK packets have been successfully received, the collector is ready to receive the incoming reported data from the sensor nodes. Otherwise, the collector will renew an Ini packet and start the notification stage again.
5. Simulation Results
5.1. Simulation Settings’ Description
We used the NS-3 simulation results to evaluate the anti-eavesdropping abilities and time consumption of TRAS-MAC and SRAS-MAC in UANs. The underwater acoustic networks were modeled through the UAN module in the NS-3 simulator.
We propose the anti-eavesdropping ratio as a performance metric to evaluate the confidentiality of transmitted data and the anti-eavesdropping effect in the MAC layer. Let
denote the anti-eavesdropping ratio, which can be calculated as
where
is the number of reported packets successfully received by the eavesdropper and
is the number of the total packets sent by all the sensor nodes.
In these simulations, the sensor nodes are linearly deployed with the same spacing distance l between two neighboring nodes, and their depth was fixed at 500 m. Each sensor node is equipped with a half-duplex acoustic modem whose data rate r was set at 2 kbps. During each simulation, each sensor node needs to deliver 100,000 B of data to the collector. For the SRAS-MAC, the collector’s location is randomly selected from four optional positions. For the TRAS-MAC, the collector’s location is randomly selected within the one-dimensional deployment area. The eavesdropper is randomly deployed within the one-dimensional or three-dimensional deployment area. We used UniFormRandomVariable provided by NS-3 to generate the coordinates of the collector in TRAS-MAC and the eavesdroppers. Each simulation result is the expectation based on 1000 runs of simulations.
5.2. The Impact of Arrival Order and Parity of N to
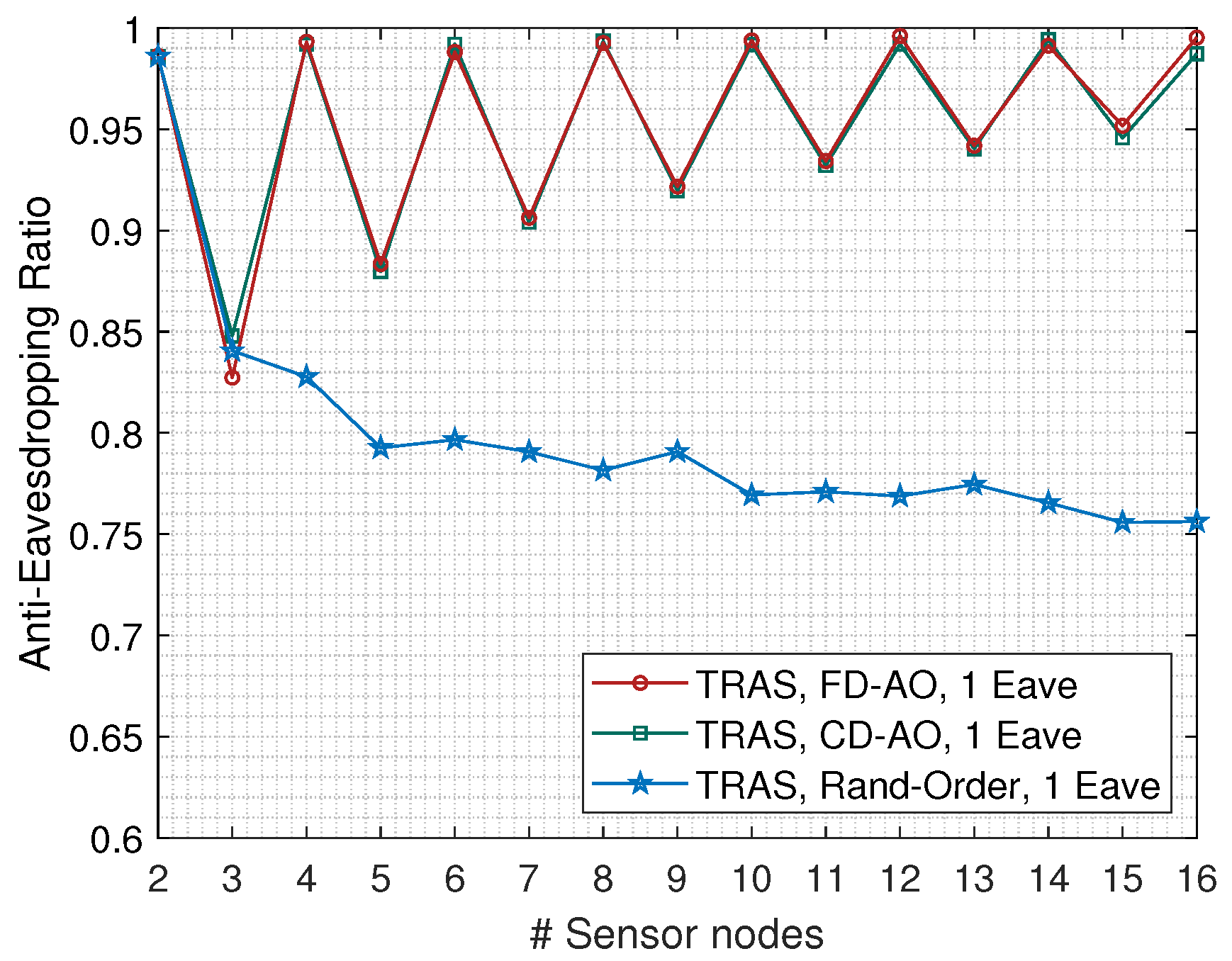
First, we discuss the impact of the arrival order and the parity of N to the anti-eavesdropping ratio of TRAS-MAC. The selected arrival order of receiving-alignment includes “CD-EA”, “FD-EA”, and random order. In this discussion, the eavesdropper is also deployed within the one-dimensional deployment area. The spacing distance l was set at 15 km, and the packet size B was fixed at 125 B.
From
Figure 12, we can observe that the TRAS-MAC with random arrival order had a lower performance compared to the TRAS-MAC with the CD-EA or FD-EA order, which both achieved similar
values for a given
N. Hence, Proposition 1 is validated. Then, as illustrated in
Figure 12, the parity of
N had the same impact on the value of
under both CD-EA or FD-EA orders. Specifically, TRAS-MAC performed better when
N was an even value than when
N was an odd value. Hence, Proposition 2 is also validated.
In addition, it is easy to notice that the
was close to 1 for the TRAS-MAC under arbitrary arrival orders when
. According to (
15), the slot length equaled two-times
when
. Therefore, one slot duration was left in a scheduling period that was too short to tolerate the change of propagation delay toward the eavesdropper, resulting in almost all the overheard packets colliding with the eavesdropper. On the contrary, there was two-times the packet duration left when
, and there existed the possibility that one packet can be easily eavesdropped at the eavesdropper when the
N was an odd value. Hence, we can observe that the value of
greatly decreased from
to
.
The simulation results illustrated in
Figure 12 have shown that the eavesdropper was constrained when it was located within the one-dimensional space, i.e., almost a few data can be eavesdropped for the case that
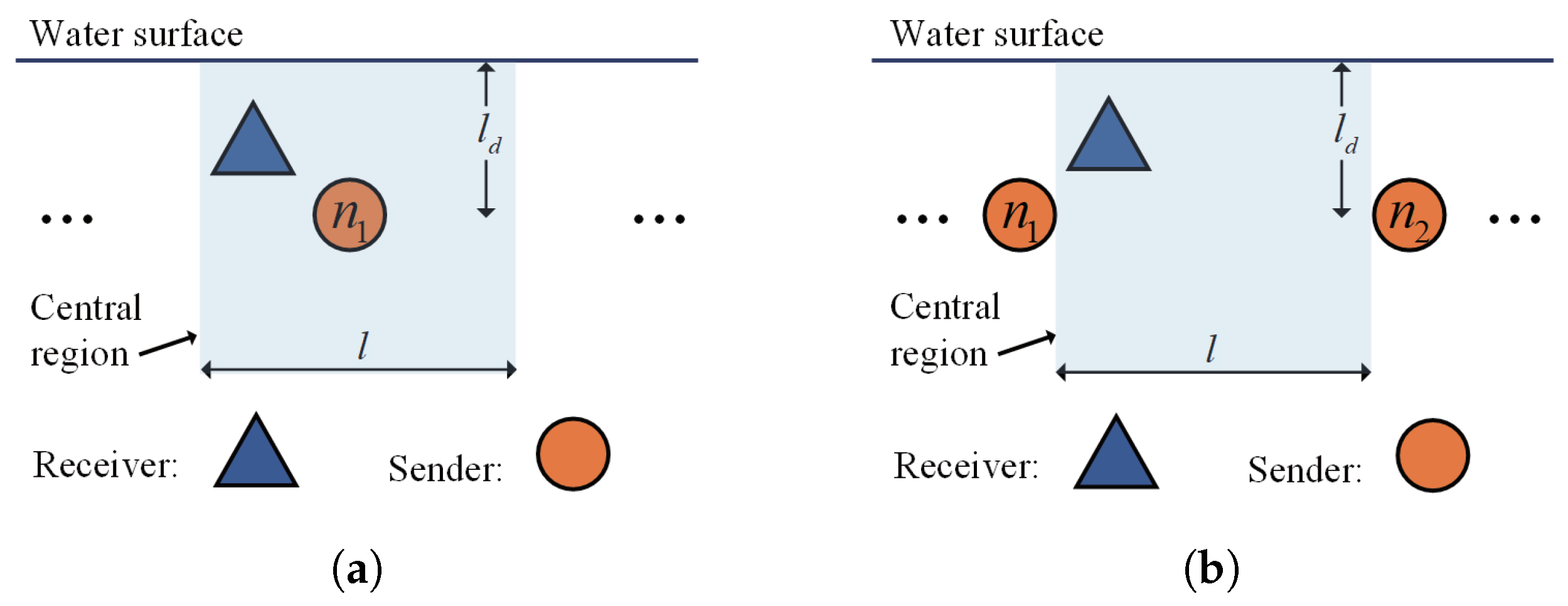
N was an even value. In the following discussions and evaluations, the eavesdroppers were randomly located within the central region with size
, as shown in
Figure 3.
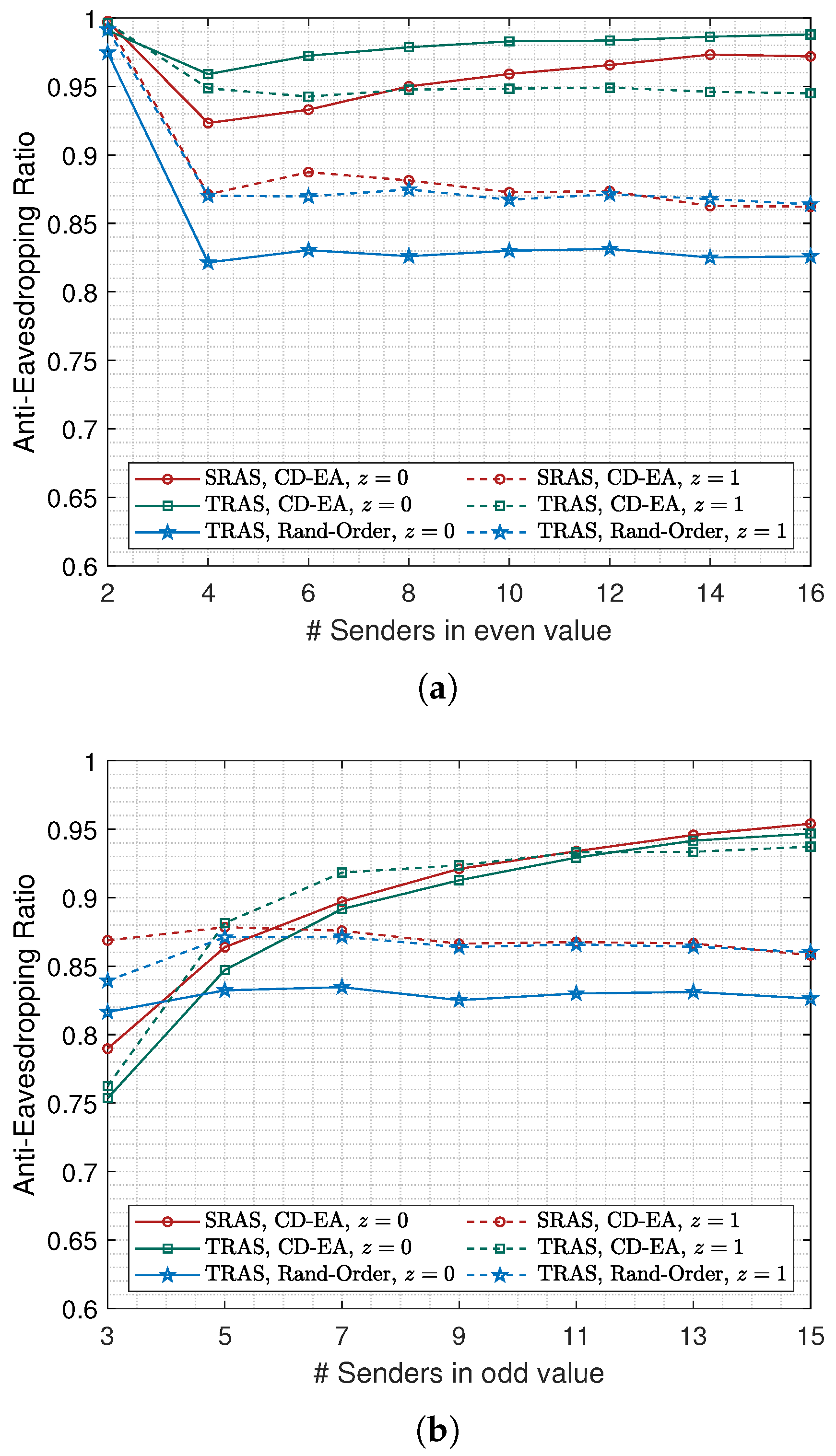
5.3. The Impact of Packet Duration to
As discussed in
Section 4.2, SRAS-MAC needs to adjust the packet duration to achieve collision-free receiving-alignment, and there is a trade-off between the anti-eavesdropping ability and the location privacy of the collector. In this discussion, the spacing distance
l was also set at 15 km, and the packet duration of SRAS-MAC and TRAS-MAC was set according to (
26) and (
27) for
and
, respectively.
Considering the impact of parity of
N, as we discussed in
Section 5.2, the
under the network that
N is an even value and
N is an odd value are illustrated in
Figure 13a,b, respectively.
As shown in
Figure 13a,
was still close to 1 for both SRAS-MAC and TRAS-MAC under arbitrary arrival orders and arbitrary values of
when
, whose reason has been discussed above. Also, we noticed that, for the case of setting
z to 0, the achieved
of SRAS-MAC and TRAS-MAC using the CD-EA order still grows as the value of
N increases in
Figure 13a,b, respectively. Moreover, it is noticed in
Figure 13b that SRAS-MAC outperforms the TRAS-MAC in
when the value of
N is in 13 and 15.
Then, for the SRAS-MAC and TRAS-MAC under the CD-EA order, we can observe that they achieved greater in most cases where z was 0 than in cases where z was 1. On the contrary, for the TRAS-MAC under random arrival order, the achieved performed worse when z was 0 than when z was 1. It can be understood that the longer time slot while setting z in 0 will result in a greater spatial reuse opportunity. As we discussed in Proposition 1, using the CD-EA order can efficiently constrain the spatial reuse opportunity, but not using the random arrival order.
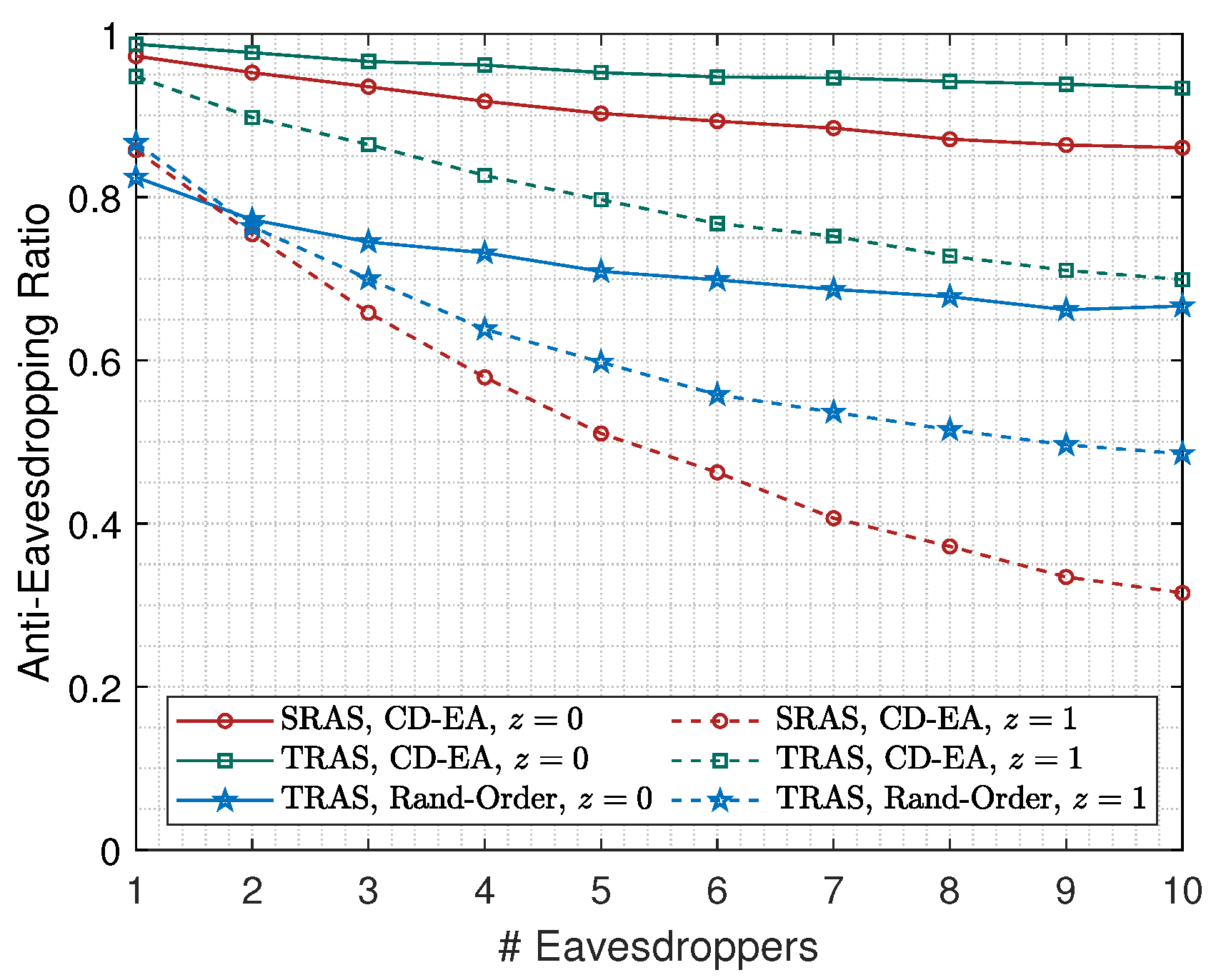
5.4. The Impact of the Number of Eavesdroppers to
As shown in
Figure 13, for the only one-eavesdropper case, the available
of SRAS-MAC and TRAS-MAC were always over 0.75. Moreover, for SRAS-MAC, at most three fake collector locations existed. Therefore, we were interested in studying the anti-eavesdropping abilities of multiple eavesdroppers.
We illustrate the values of
encountering an increasing number of eavesdroppers (i.e., from 1 to 10) in
Figure 14, where
l was set to 15 km,
N was set to 16, and the eavesdroppers were still randomly located within the three-dimensional deployment area.
It is clear that the more eavesdroppers join the network, the lower the that can be achieved. However, the SRAS-MAC and TRAS-MAC with the CD-EA arrival order z set to 0 still achieved 0.8 in under the cases where ten eavesdroppers were located inside the deployment area. On the contrary, compared to the case of z set to 0, the anti-eavesdropping ratio of the other schemes declined more quickly setting z to 1. It is noted that, as the eavesdroppers increased to four, about 60% of the data could still be saved using SRAS-MAC with z set to 1. Since it is hard to guarantee the location privacy of the collector even in SRAS-MAC, as the number of eavesdroppers was greater than four, it was better to use the maximal packet duration () to maximize the security of the reported information.
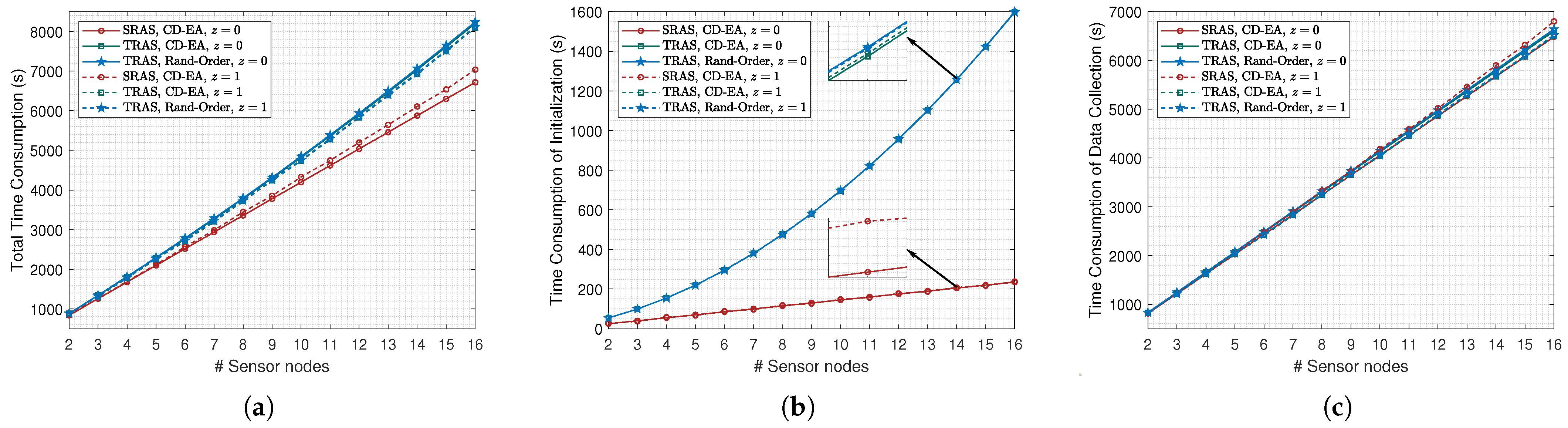
5.5. The Impact of l and N on the Time Consumption
Finally, we want to discuss the time consumption among SRAS-MAC and TRAS-MAC with different packet duration settings. The values of the time consumption were calculated as follows:
The total time consumption: from the time that the collector sent the first control packet to the time that the collector received the last reported data packet.
The time consumption of data collection: from the time that one of the sensor nodes sent the first data packet to the time that the collector received the last reported data packet.
The time consumption of initialization: the difference between the total time consumption and the time consumption of data collection.
For the simulation with different settings of
N, which was from 2 to 16,
l was set to 15 km, and the results are illustrated in
Figure 15. As shown in
Figure 15a, the TRAS-MAC protocol consumed more time collecting the same size of data and increased more quickly as the value of
N grew. Specifically, for the case that
, the TRAS-MAC protocol consumed a quarter more time than the SRAS-MAC protocol. The reason can be found in
Figure 15b. Since an extra two-way handshake existed between the collector and each sensor node, the time consumption during the initialization of the TRAS-MAC protocol was much greater than the SRAS-MAC protocol and grew more quickly as the value of
N grew. On the contrary, as shown in
Figure 15c, there was little difference between the TRAS-MAC protocol and the SRAS-MAC protocol in the time consumption during data gathering.
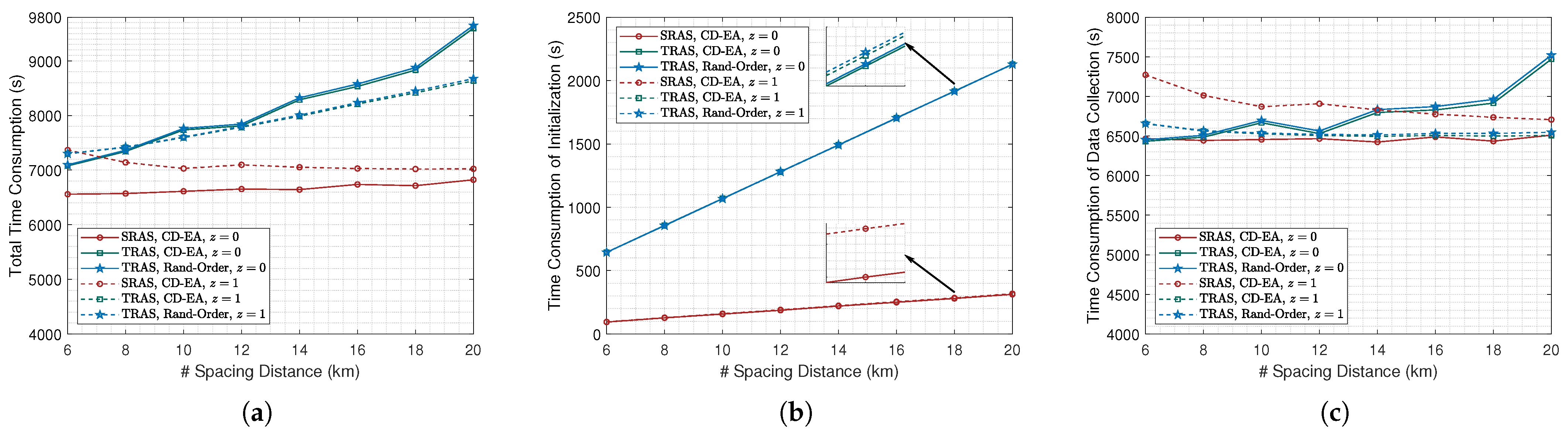
For the simulation results for different settings of
l, i.e., from 6 km to 20 km,
N was set at 16, and the results are illustrated in
Figure 16. Similar to the results in
Figure 15, as illustrated in
Figure 16a, the total time consumption of the TRAS-MAC protocol was greater than the SRAS-MAC protocol. However, it can be observed that the total time consumption of the TRAS-MAC grew as the value of
l increased. In the same cases, the total time consumption of the SRAS-MAC remained stable. However, the difference can be found in the initialization and data-collection stages. As shown in
Figure 16b, the time consumption of the TRAS-MAC protocol during initialization increased more quickly than the SRAS-MAC protocol as the value of
l increased. Moreover, as shown in
Figure 16c, the time consumption of the data collection of the TRAS-MAC setting
z to 0 also increased as the value of
l increased, which led to greater total time consumption.
6. Conclusions
This paper is the first work to reveal the security nature of space–time coupling access in UANs. We studied this in a data-gathering scenario in which a group of linearly deployed sensor nodes directly sends their packet to a single receiver. We discovered an eavesdropping ring centered on those deployed sensor nodes, where the eavesdropper can successfully steal all the reported packets. We found that the typical receiving-alignment-based scheduling MAC (TRAS-MAC) exposed the relatively spatial information among sensor nodes with the collector to the eavesdropper, which enabled the eavesdropper to locate the eavesdropper ring and steal all the reported data. We discovered that the eavesdropping ring could be degraded into a point by deploying the collector within the one-dimensional space of the linear sensor node chain, which alleviates the eavesdropping risk. However, the collector’s location will be exposed to the eavesdropper, and its security is at risk. We proposed a slotted- and receiving-alignment-based scheduling MAC (SRAS-MAC) protocol, which can provide at most four optional positions to the collector to hide its location. The analysis and the simulation results showed that using closer distance, earlier arrival and farther distance, earlier arrival orders can efficiently prevent the data from being eavesdropped when the eavesdropper is also located inside the one-dimensional deployment area. We also found that the eavesdropper can steal fewer packets as if the number of sensor nodes is an even compared to an odd value. Further evaluations of the packet duration and the number of eavesdroppers when the eavesdropper is located inside the three-dimensional deployment area were conducted through NS-3 simulations. The simulation results showed that, if the maximal packet duration is adopted, the proposed SRAS-MAC achieved similar anti-eavesdropping performance as TRAS-MAC using the CD-EA order. Moreover, SRAS-MAC can efficiently prevent eavesdropping attacks from multiple eavesdroppers, e.g., less than 20% of the data can be stolen under the ten-eavesdropper case. The simulation results also showed that SRAS-MAC performed better than TRAS-MAC in the time consumption.
In future work, on the one hand, we plan to analyze the anti-eavesdropping ability under a more-general topology and design anti-eavesdropping scheduling protocols accordingly; on the other hand, we will consider exploring the applicability and robustness of the proposed SRAS-MAC protocol through field tests.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}