1. Introduction
Underwater cultural heritage (UCH) is an invaluable resource that encapsulates humanity’s past, providing a tangible link to traditions and customs. Although it is underappreciated, UCH holds immense potential for socioeconomic and tourism development, serving as a knowledge source that can positively impact tourism chains and flows. With the ocean floor teeming with artifacts, ruins, wrecks, and remains of historical or archaeological significance, UCH acts as a storehouse of human civilisation.
Uncoordinated regulatory policies, the lack of adequate protection measures, the lack of suitable underwater techniques and materials, and insufficient adaptation to climate-related stressors and environmental degradation still pose significant threats to UCH. Therefore, strengthening its conservation is crucial. The 2001 UNESCO Convention on the Protection of Underwater Cultural Heritage [
1] was a significant milestone in preserving UCH. Providing a detailed framework for states to cooperate, the Convention sets guidelines highlighting the need for in situ preservation, training, data sharing, and international cooperation.
The conservation challenge lies in its intrinsic demand for customisation. Each site or artifact presents unique characteristics, vulnerabilities, ecological or historical contexts, and risk factors. Consequently, a successful conservation strategy never involves just a single approach but is rather a finely tuned ensemble of diverse methodologies. This complexity spawns distinct interdisciplinary research avenues, requiring collaboration among experts from diverse but intrinsically linked fields such as archaeology, geology, biology, oceanography, and the technology-oriented domains of engineering, marine sciences, as well as advanced technologies such as artificial intelligence (AI), robotics, and the internet of underwater things (IoUT). Projects like TECTONIC [
2] (Technological Consortium to Develop SustainabIlity of Underwater Cultural Heritage) leverage this holistic approach, capitalising on cross-disciplinary synergies to engineer sophisticated tools, methodologies, and AI-based models for the sustainable management of UCH.
This work proposes an innovative platform combining IoUT and edge computing to enhance the monitoring, localisation, and management of UCH. The platform’s architecture is designed to centralise data processing through a central unit deployed on ocean buoys located near the sensor networks and heritage sites. This allows for real-time event detection, classification, and responses without relying on cloud connectivity. Keeping most processing and decision making at the network edge dramatically improves system responsiveness. It ensures the continuous monitoring and protection of sites even during intermittent cloud connectivity. The edge nodes can still cache, analyse, and act on critical data until the cloud is reachable. This makes the overall system more reliable and robust to network failures or delays. Edge computing also reduces infrastructure costs and other costs associated with high-bandwidth undersea networks and cloud storage. By transmitting only processed metadata rather than raw sensor data to the cloud, it minimises network throughput requirements and data storage needs.
These nodes are equipped with acoustic communication technologies to receive data from sensors strategically located across the underwater site and from other elements such as divers or remotely operated vehicles (ROVs) as well as to measure the distance between them. These technologies, combined with edge computing, enable the triangulation and precise determination of the position of underwater assets. This integration allows for effective real-time monitoring and intervention, addressing the limitations of traditional GPS systems, which are ineffective underwater due to signal attenuation.
Long-range (LoRa) technology facilitates long-range communication between the edge nodes, enabling efficient and low-power data transmission from submerged environments. This is further complemented by nonterrestrial networks (NTNs), including satellite constellations, extending connectivity to remote and hard-to-access maritime areas. By integrating these technologies, the platform supports a resilient, multilayered communication and localisation system that ensures continuous operation, even during intermittent cloud connectivity. This approach not only improves the accuracy and reliability of underwater localisation but also enhances overall system responsiveness, making it ideal for real-time conservation efforts.
The proposed platform leverages AI models at the edge to provide real-time risk assessments based on data from public databases and in situ sensor measurements. This allows for the dynamic prioritisation of conservation efforts, making it possible to anticipate and mitigate the risks associated with environmental factors, such as sediment displacement and rising sea temperatures.
UCH-related platforms have been identified in the literature [
3,
4,
5,
6,
7]. However, to the best of our knowledge, none integrate the edge computing paradigm. This type of architecture leverages distributed processing and storage capabilities to capture, analyse, and monitor large amounts of multimodal sensor data in real time. This helps address the current limitations in centralised cloud-based solutions by performing initial data filtering, processing, and analysis close to the data source using edge nodes [
8]. While edge computing introduces security and management challenges due to increased network nodes, it also enhances privacy and security [
9].
Overall, the platform not only addresses the current limitations in underwater heritage conservation but also provides a scalable and adaptable foundation for integrating future technological advancements, ensuring the long-term protection and management of UCH sites.
This paper is organised as follows:
Section 2 reviews the existing IoUT solutions applied to UCH conservation, identifying current gaps and challenges.
Section 3 details the edge computing platform’s architecture, layers, and components, explaining their interaction within the proposed system.
Section 4 presents a case study focused on the underwater localisation system, demonstrating how the platform’s acoustic communication could facilitate precise real-time tracking and monitoring of submerged heritage assets.
Section 5 concludes this paper and outlines future work.
2. Related Work
The effects of climate change on UCH are increasingly concerning for researchers and policymakers alike [
10,
11]. Rising sea temperatures, ocean acidification, and changes in sea currents directly affect the structural integrity of submerged cultural assets [
12]. Studies have shown that warmer water accelerates the corrosion of the metals found in shipwrecks, and acidification increases the degradation rate of organic materials such as wood and textiles [
13]. The rising sea level could directly impact not only coastal but also underwater heritage. Some land-based sites will flood. Additionally, the disruption of sediment layers due to the changing ocean currents and extreme weather events exposes previously buried artifacts to more aggressive environmental conditions, further accelerating their decay [
14].
Usually, fieldwork in UCH conservation has long relied on direct human intervention, with experimented divers conducting surveys and site maintenance. However, these methods pose significant risks to both the divers and to the delicate nature of the heritage sites [
15]. This shift has led to the adoption of technological systems in conservation efforts, allowing for detailed exploration and monitoring of UCH without physically disturbing the site.
Three-dimensional surveying and mapping techniques have proven to be essential tools for the surveillance and documentation of UCH. They primarily rely on optical and acoustic sensors to acquire detailed representations of the sites to be digitalised by using 3D reconstruction techniques [
16,
17]. Single-beam echo sounders are instrumental in constructing maps via profiling, while multibeam echo sounders expedite mapping extensive areas using fan-shaped beams. Side-scan sonar generates 2D images of the surface using two fan beams. Sub-bottom profilers can penetrate sediment to create images of subsurface structures [
18].
ROVs are manually controlled in real time and tethered to a surface vessel with an umbilical cable. They are equipped with various sensors and are commonly used for UCH monitoring and documentation [
19]. Autonomous surface vehicles (ASVs) are unmanned robotic platforms typically equipped with sensors and cameras for mapping and monitoring tasks [
20]. In addition to these functions, ASVs can play a crucial role in enhancing diver safety by tracking their position in real time, monitoring environmental conditions, and providing immediate alerts or support during underwater operations [
21,
22]. Autonomous underwater vehicles (AUVs) are fully autonomous robots that perform missions without human intervention or surface vessels. They carry advanced sensors such as side-scan sonar and multibeam echo sounders, allowing for the high-resolution 3D mapping of UCH sites [
23,
24].
The conservation of submerged archaeological complexes requires innovative and sustainable solutions that not only preserve these sites in situ but also leverage the available data for informed decision making. As the availability of environmental and archaeological data increases, the challenge for conservationists is how to intelligently combine this information to generate actionable insights [
25]. In this context, sensors have emerged as highly efficient and cost-effective instruments for detecting changes in the environment [
26]. Deployed at critical underwater locations, these sensors provide continuous measurements of environmental variables such as temperature, pressure, salinity, and pH levels, all of which play a significant role in the stability and preservation of submerged artifacts. By integrating these sensors into underwater communication networks, real-time measurements can be conducted, allowing for the precise assessments of risks and enhancing the response capabilities for addressing potential threats to the integrity of heritage sites. The information gathered through sensor networks not only aids in assessing the immediate conditions surrounding a site but also serves as a foundation for predictive models that forecast future threats due to climate change, sediment displacement, or human activity. By leveraging these technological advancements, the conservation of UCH becomes more proactive, ensuring that interventions are timely and precisely targeted, thus prolonging the lifespan of these invaluable underwater resources.
In this context, underwater localisation plays a crucial role in conservation operations, where accurately identifying and marking points of interest is not only vital for research and documentation but also essential for ensuring the safety and coordination of conservation teams [
27]. Accurate underwater localisation has long been recognised as a challenging task. The limited propagation of radio waves underwater, which form the basis of most surface localisation systems, has driven the search for alternative solutions. Acoustic communication has emerged as the most promising option, taking advantage of sound waves’ ability to travel effectively through water [
28]. However, the development of precise and reliable acoustic technologies continues to be a complex task, particularly when balancing technical complexity and cost-effectiveness. In response to these challenges, devices like the low-cost, compact NMv3 modem have been introduced. This modem facilitates communication and distance measurement between transmitter and receiver using acoustic technology in underwater environments [
29].
The advancement of acoustic communication has been crucial for developing underwater wireless communication networks (UWCNs). Despite its limitations, acoustic communication remains the most versatile and widely used physical layer technology for underwater communication. This technological foundation has enabled the rise of the IoUT, an extension of the internet of things (IoT) to the underwater environment [
30]. The IoUT establishes a network of interconnected smart devices capable of exchanging data and performing real-time measurements, representing a significant leap forward in the monitoring and conservation of aquatic ecosystems and submerged heritage. By applying the IoUT in underwater heritage conservation projects, the possibilities for precise identification, detailed documentation, and adequate protection of historically and culturally significant sites are greatly expanded. The application of IoUT in UCH conservation opens new possibilities for site monitoring and management. However, one of the critical challenges in deploying such networks is optimising both energy consumption and security, particularly in harsh underwater environments which are prone to jamming. Ref. [
31] demonstrates that through content caching and selective encryption, UWCNs can enhance both security and energy efficiency, making IoUT applications in UCH conservation even more viable. By creating a network of smart and secure interconnected devices, the IoUT allows for the continuous, real-time monitoring of underwater interest points [
32]. These smart devices not only monitor environmental conditions but also interpret and respond to changes, enhancing the strategies for preserving and managing underwater cultural heritage.
Marine IoT systems face significant challenges in establishing reliable communication networks due to their deployment in remote areas, often far from terrestrial communication infrastructure. These locations lack the connectivity provided by traditional networks, making it difficult to transmit data in real time, which is crucial for monitoring and managing maritime points of interest. LoRa technology has been widely adopted in IoT applications due to its low power consumption and long-range capabilities, making it suitable for monitoring in remote maritime environments [
33]. Although LoRa is recognised for its long-range communication capabilities, reaching distances of approximately 10 km in direct line of sight, many maritime points of interest are located far beyond this range [
34]. The lack of repeaters and gateway stations to extend the coverage over such vast distances significantly limits its ability to connect remote IoT systems to the global internet. As a result, LoRa is not a viable option for establishing real-time, large-scale data transmission from remote areas to cloud-based services or centralised networks. However, LoRa can still be effectively employed for localised communication between surface nodes within its operational range. In rural environments, where there are fewer obstacles, the range can be extended up to 35 km using the narrowband internet of things (NB-IoT) technology. The signal strength in open areas allows the NB-IoT to achieve greater coverage, making it well suited for remote or sparsely populated regions, such as ocean environments [
35].
Significant advancements in satellite communication technologies have addressed this limitation in the past decade, particularly with low Earth orbit (LEO) satellites. Companies such as Telesat, OneWeb, SpaceX, and Amazon have developed LEO satellite constellations that offer near-global broadband coverage, significantly enhancing connectivity for remote IoT systems [
36]. NTNs, including satellites, drones, and high-altitude platforms, are emerging as robust solutions for integrating IoT networks with space–air–sea systems, enabling seamless data transfer and the real-time monitoring of maritime environments [
37]. Integrating the IoT with NTNs has proven to be particularly transformative in fields such as maritime surveillance, environmental monitoring, and disaster response, where real-time data from remote sensors are essential [
38]. This convergence of the IoT and NTNs is paving the way for more resilient and efficient marine IoT applications.
Web-based platforms provide a comprehensive solution for conserving UCH. These platforms enable centralised storage and remote access to large UCH datasets from any location. Field data, including images, videos, and environmental parameters, can be uploaded in real time to the cloud, allowing for seamless access and processing. Cloud technology also facilitates photogrammetry and 3D modelling, which can be performed remotely, eliminating the need for specialised hardware and software during field surveys. Notable examples in the literature showcase the effectiveness of these platforms. For instance, the Lab4Dive system [
6] is an innovative product designed for surveying, documenting, and preserving UCH in the Mediterranean Sea. This system comprises an underwater tablet to assist divers, a docking station that acquires and exchanges data from various environmental sensors and a high-resolution camera, and a remote server hosting the cloud database and performing 3D reconstruction using photos captured during the survey. Another notable platform is VIRTUALDiver [
7], which leverages virtual reality (VR) and augmented reality (AR) technologies to design and manage interactive tourism experiences. In the Republic of Mauritius, UCH data are uploaded to an online platform called the E-platform, which stores a wide range of information, including archaeological articles, legislation, reports, field data, and remote services [
39]. The MACHU project utilises the MACHU GIS system [
40] as its central online platform, which is a web-based application integrating essential information for managing UCH, such as heritage details, environmental data, legislation, and historical maps.
Innovative architectures, such as satellite edge computing, enhance data processing efficiency, enabling faster response times and reducing bandwidth usage through localised computing [
41]. Edge computing significantly reduces latency by offloading resource-intensive tasks to nearby nodes, optimising resource use, and improving user experience. This approach is particularly relevant for latency-sensitive services, where real-time resource allocation and offloading algorithms are critical. The authors of [
42] proposed a resource allocation model for edge computing networks to minimise total latency by combining content caching and task offloading to edge servers, effectively reducing execution time and improving the efficiency of limited resources. In another approach, a deep reinforcement learning method was implemented to address both the latency and fairness in computation offloading to edge servers, demonstrating superior performance in reducing service latency through an optimised reinforcement learning framework [
43].
3. Conceptual Framework
This work proposes an innovative IoUT platform that leverages edge computing technologies for the real-time monitoring and management of UCH. By distributing computing resources and data storage closer to where data are generated through edge nodes, this architecture addresses the issues of network congestion and delays that plague traditional cloud-centric approaches. The platform seamlessly integrates real-time sensor measures with historical data stored in databases, painting a comprehensive picture. Its modular design allows the various components, such as sensors, edge nodes, and cloud services, to operate independently and collaboratively with other systems. This interoperability is crucial as UCH sites often span large areas requiring coordination across different types of infrastructure.
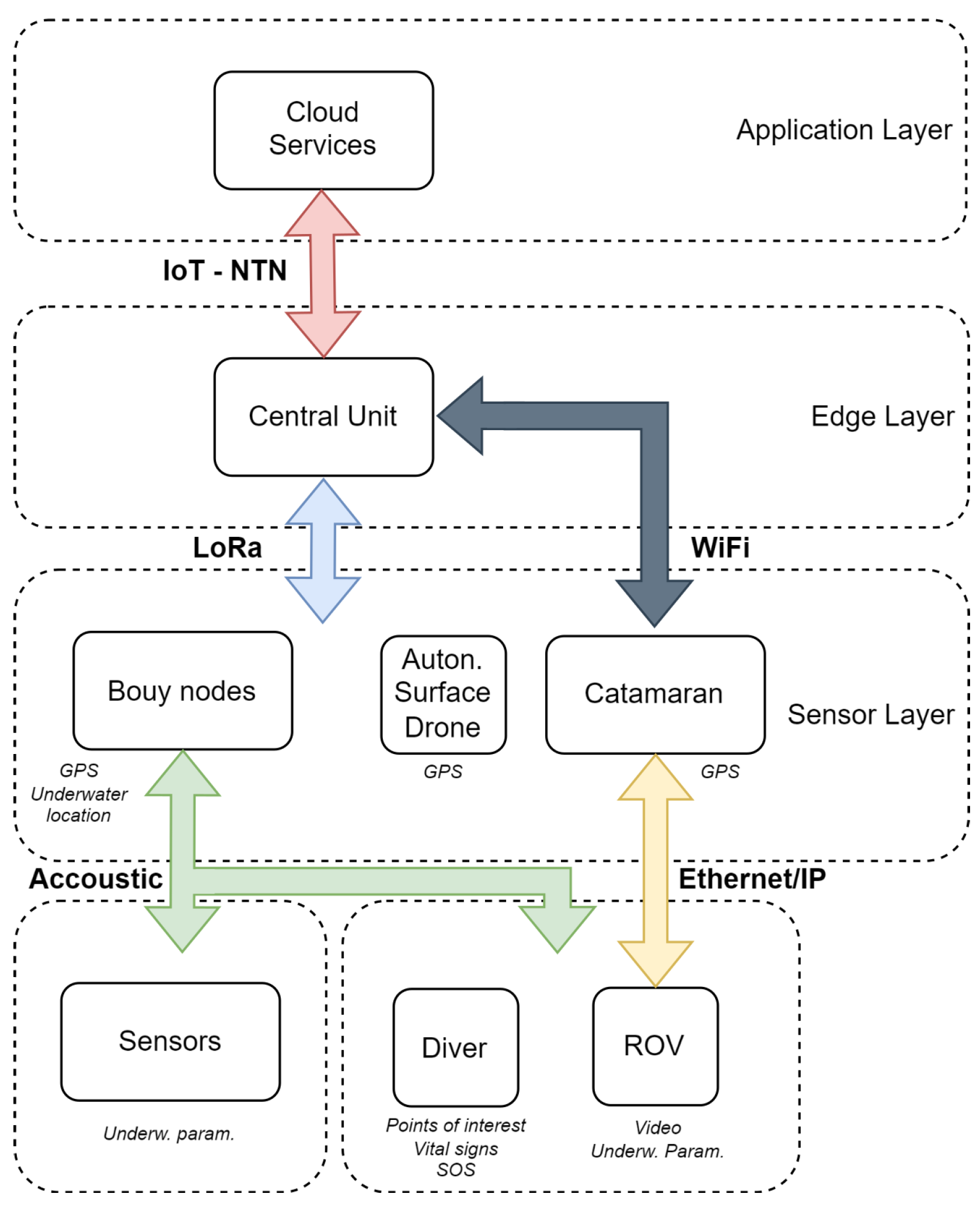
The orchestration of the elements is conducted via the platform modules, utilising a layered architectural model. This design facilitates a phased approach to developing application and service control, encompassing three layers. The first of these, the sensor layer, integrates sensor and actuator hardware for data gathering and command execution. The second, known as the edge layer, consists of edge nodes that are accountable for data processing, storage, network, and additional infrastructure resources. The third, the application layer, incorporates a range of cloud services for data analysis and visualisation.
Figure 1 illustrates the proposed edge computing platform.
Data collected from the sensor layer are instantly processed by the edge layer nodes, which execute the initial filtering and diagnostics of critical information. This allows the system to detect and identify relevant events or anomalies so that critical data are the only data sent to the application layer. These data include unprocessed data points, which are filtered for further processing, analysis, storage, and visualisation in the cloud-based application layer. This interaction between the different layers makes it possible for the platform to provide a high level of system performance without delay and to automatically send critical information to the cloud, ensuring the platform provides real-time alerts on crucial data information.
Figure 2 illustrates the proposed system’s communication architecture.
Below, the measuring systems and support elements are described. Some existing solutions have already been identified in the market. For example, we selected innovative and cutting-edge marine systems and technologies developed by H2O Robotics (H2O Robotics Ltd., Zagreb, Croatia) [
44] and BlueRobotics (Blue Robotics Inc., Torrance, CA, USA) [
45].
3.1. Sensor Layer
The sensor layer is responsible for collecting data from the subsea environment through a network of sensors and actuators, strategically deployed throughout the UCH site. The sensors and elements can be categorised into continuous measurement systems and point support elements.
3.1.1. Continuous Measurement Systems
An underwater sensor network is deployed in the area of interest at different heights on the seabed. It records environmental parameters using acoustic communication technology to transmit the information to the surface, where a network of buoys receives the data. They are equipped with a battery system to provide the device with sufficient autonomy.
The node buoy network consists of a series of buoys deployed over the area of interest to act as a data gateway. They are responsible for receiving the data from both the sensor network and the support elements, such as the ROV or divers performing field inspections. By using acoustic transceivers, such as the H2Observe solution [
46], that measure the time it takes for a pulse to travel from the transmitter to the receiver, each buoy can calculate the distance that separates it from the element with which it is communicating. In turn, the absolute position of the buoy is calculated by a GPS receiver built into the buoy. This device is responsible for redirecting the information received acoustically and transmitting it to a buoy that acts as a central unit using LoRa communication technology. It periodically sends data on its status (battery level, status of internal systems, etc.) and absolute position. It has a power supply system composed of batteries and solar panels to give the device total autonomy.
3.1.2. Point Support Elements
The point support elements include additional support systems that enhance data collection and site management:
ROVs with high-quality video imaging allow researchers to perform visual analysis. These devices transmit the information in cabled form to the control systems located on a catamaran. An acoustic transceiver allows for communication with the surface buoy network, and, subsequently, the central unit calculates its absolute position. BlueROV2 [
47] from BlueRobotics was selected as a high-performance ROV for underwater inspections.
A catamaran is used by researchers to travel to the point of study and control the ROV. Via LoRa communication, it also receives the processed data of the vehicle or diver’s absolute position from the central buoy, allowing for the precise location of points of interest.
Divers play a crucial role in the conservation of archaeological sites. However, underwater inspections always involve risks, so it is crucial to always monitor the diver’s condition. Using equipment that integrates acoustic transmitters, the diver can transmit relevant information, such as marking points of interest, SOS signals, sharing the position in real time, or monitoring vital signs. H2Orologio [
48] is a solution that covers these requirements.
An ASV, such as the H2Orbit [
49], warns, using acoustic or light signals, that divers are performing inspection work in the area. It receives the absolute position of the diver, which is processed and sent by the central unit. With the data of the diver’s location and its own (obtained with GPS receivers), it calculates the route to position itself on the surface area where the work is being carried out. H2Observe can be attached to the AUV, underwater sensors, diver, or any other underwater asset, while H2Orbit provides connectivity.
3.2. Edge Layer
The edge layer consists of edge nodes, which have the functions of processing and storage of the data that have been collected from the sensor layer. These nodes are installed on ocean buoys and conveniently situated locations near UCH sites. Such nodes have processing power for filtering, preprocessing, and analysing data, which reduce transmission delay and network bandwidth utilisation.
The central unit (or de edge node) is a buoy that communicates via LoRa with the surface elements deployed in the area, such as node buoys, the catamaran, and the ASV. It incorporates equipment for data processing at the “edge” before being retransmitted to a cloud service. By processing information close to the source, the edge layer significantly reduces the need for high-bandwidth data transmission and improves the overall responsiveness of the system. Additionally, these nodes can cache critical data until cloud connectivity is restored, ensuring continuous monitoring even in remote areas. The processing of the received data allows the obtaining of the absolute position of the deployed underwater elements through triangulation algorithms, data preprocessing and filtering, anomaly identification, surface drone guidance, and so many more. Combined with autonomous power solutions such as solar panels and batteries, these units ensure continuous operation in remote areas.
The processing units of the edge nodes are based on mini-computers such as Raspberry Pi 4 (Raspberry Pi Ltd., Cambridge, England) or NVIDIA Jetson Nano (Nvidia Corporation, Santa Clara, CA, USA), which were chosen for their balance between computational power and low energy consumption [
50], meeting the demands of the proposed architecture. Their modular design supports scalability, allowing for the integration of additional nodes as the system expands to larger or more complex UCH sites.
Risk Assessment Tool for Climate-Related Stressors
The edge layer features a risk assessment tool that is aimed at determining the consequences of climate stressors on UCH sites. This is achieved through AI models deployed at the edge to analyse the real-time data obtained from the sensor layer. By examining key environmental parameters such as water temperature, salinity, pressure, and pH levels, the system can assess the risks posed by factors like rising sea temperatures, sediment disruption, and ocean acidification.
The risk assessment tool employs a generative AI model that runs on the edge nodes to provide on-site evaluation without relying on cloud connectivity. The initial focus is on elements with materials particularly vulnerable to corrosion, such as steel, which is significantly affected by climate change factors. The model processes key environmental parameters, including water temperature, pressure, salinity, and pH levels, as these directly influence the corrosion rate, an essential metric for assessing the condition of submerged heritage assets [
51,
52]. Additionally, databases with information on the thermohaline circulation and the sea level are combined (
Table 1).
The National Oceanic and Atmospheric Administration (NOAA) buoys are valuable for sourcing reliable and high-granularity hydroclimatic data. These buoys provide a stream of critical variables, such as water temperature, pressure, dissolved oxygen, CO2, salinity, and pH. To build the degradation scale, images capturing the state of UCH are gathered. These images are subsequently annotated by a panel of experts in underwater archaeology or heritage conservation, who classify the state of degradation on a scale from 1 to 10. The combination of these climate variables and expert-annotated images aims to produce a robust, multidimensional model capable of assessing the current state of submerged heritage and offering predictive insights that could guide future conservation efforts.
Convolutional variational autoencoders (CNN VAEs) stand out as effective analytical tools for this problem. These deep learning models are proficient in automatically extracting latent feature vectors from high-dimensional data, such as images of the UCH site. The encoder part of the VAE (z|x) generates a probability distribution of latent variables z, which encapsulates the site’s characteristic values affected by the input parameters. The decoder part (z|x), also known as the generative model, reconstructs the input data from these latent variables.
In the context of training the VAE model, the loss function
is employed, which is a weighted combination of the Kullback–Leibler (KL) divergence
and the reconstruction loss
, as shown in Equation (
3):
: The KL divergence quantifies the dissimilarity between the learned distribution of latent variables and a prior distribution . This ensures that the latent space remains well structured and follows the desired prior distribution.
: The reconstruction loss measures how accurately the decoder reconstructs the original input data from the latent variables, capturing the fidelity of the reconstructed data compared to the input.
Here,
and
are hyperparameters that weigh the significance of each term in the overall loss function. The model uses this loss function to learn a latent scale ranging from 1 to 10, quantifying the risk of degradation or, in this case, the rate of corrosion at the UCH site. Thus, employing a CNN VAE can provide a nuanced and precise assessment of the corrosion rate, enabling more targeted and efficient conservation strategies. In this study, a variational autoencoder (VAE) with specialised 1D convolutional layers was used to process the one-dimensional signals originating from marine sensors. These one-dimensional signals serve as the input to the VAE model. The encoder part of the VAE architecture returns distribution variables
and
, which are subsequently used to generate latent variables
z. These latent variables
z are then input into a fully connected classification layer. The classifier was designed to output a categorical score ranging from 1 to 10, reflecting the risk of degradation of the selected UCH elements. The VAE is trained unsupervised using TensorFlow’s (
www.tensorflow.org) capabilities for 1D convolutional networks. The latent variables
z obtained are then employed to train a supervised classification layer. The layer uses a SoftMax activation function and is trained using a categorical cross-entropy loss function, thus enabling the model to assign degradation levels in a supervised context [
53]. The proposed model is illustrated in
Figure 3.
Certainly, if the fully connected layer is focused on classifying the degradation risk scale of underwater elements and the VAE is targeted towards capturing sensor signals related to climate change, then the latent space plays a crucial role in information sharing between these two aspects.
represents the loss from the fully connected layer, designed specifically for classifying the degradation scale, and it employs a categorical cross-entropy loss.
reflects the VAE’s performance in capturing sensor-based signals indicative of climate changes, combining the KL divergence and reconstruction loss. It is expressed as
is a new term that quantifies the efficacy of the latent space in capturing and sharing useful information between the degradation classification and climate signal representation. One can employ a correlation-based metric or a mutual information term to quantify this. The revised overall loss function
can then be defined as
In this framework, the latent space becomes an information bridge that not only helps in the reconstruction of sensor signals but also aids in the effective classification of the degradation risk scale. The hyperparameters control the trade-off between these objectives. From a computational standpoint, this architecture would require a multiobjective optimisation strategy, and the backpropagation algorithm would need to be adapted to accommodate these multiple loss components. This approach would necessitate an intricate balance in architecture design and hyperparameter tuning. However, it offers a more comprehensive understanding of the relationships between degradation and climate variables, which can be especially useful in contexts that require high interpretability and decision-making granularity.
3.3. Application Layer
Advanced data analytics, archiving, and visualisation are included in the cloud services integrated in the application layer. Transmitted data that were processed and filtered by the edges of the layer nodes to the cloud are stored in conjunction with historical datasets for analysis and modelling. This layer enables the creation and application of AI models for risk assessment and prediction in order to enhance the efficiency of conservation efforts in relation to current and historical information and trends.
There is also a cloud application containing a browser interface for heritage managers, which enables them to see data, alerts, and reports based on AI-generated analysis. This section also enables modular construction, so that this layer can be made compatible with a variety of IoUT platforms and allow for easier integration and ease in expanding the reach of the platform to wider deployment.
4. Buoy System for Underwater Location: A Case Study
This case study explored the practical implementation of the proposed edge-computing-based architecture for the conservation and management of UCH, specifically focusing on the buoy system designed for accurate underwater location tracking.
The ability to precisely track the position of assets such as ROVs, divers, and environmental sensors (among others) is essential for monitoring and protecting submerged sites. However, traditional methods of underwater localisation often face limitations due to poor GPS signal reception underwater and the complexity of marine environments. To address this challenge, a specialised buoy system was developed that integrates acoustic communication technology, GPS, and LoRa-based protocols. This system enables the real-time, accurate localisation of underwater acoustic elements (UAEs) by using edge computing to process data directly at the buoy level, reducing latency and ensuring continuous operation even in areas with intermittent cloud connectivity. By decentralising data processing and utilising advanced communication methods, this solution provides a robust and reliable tool for tracking and managing UCH assets, ensuring better protection and conservation outcomes.
The prototype system proposed for underwater localisation was designed in accordance with the specifications of the TECTONIC project [
2]. This solution is structured around the main components of the architecture presented before (
Figure 1). The elements that comprise the electronic architecture of the buoys are presented in
Figure 4:
A Succorfish Delphis V3 modem (Succorfish Ltd., North Shields, England) [
54], along with an acoustic transducer, were essential for facilitating underwater communication, taking charge of generating and analysing the necessary acoustic signals for this purpose. This modem acted as a gateway between serial communication and acoustic communication. For serial communication with an external device, it had an RS232 interface, ensuring the transmitted data’s integrity, effectively protecting them from noise and possible interference.
The Nordic uC PCB, developed by the research group LABUST (Laboratory for Underwater Systems and Technologies—LABUST, Zagreb, Croatia) [
55], integrated the Nordic nRF52840 microcontroller (Nordic Semiconductor ASA, Trondheim, Norway) and was responsible for the communication between the acoustic modem and the ESP32 + LoRa board (Soldered Electronics, Osijek, Croatia), as well as for the voltage regulation for the electronic components. The ESP32 + LoRa board, from e-radionica (now Soldered Electronics [
56]), featured an ESP32-WROOM-32D microcontroller (Espressif Systems Co., Ltd., Shanghai, China) that supported WiFi and Bluetooth and had an embedded LoRa module for long-distance transmissions. Communication with the GPS module and with the Nordic microcontroller board was carried out via UART serial buses and with the LoRa module through SPI.
An Adafruit Ultimate GPS module [
57] was included, providing location, speed, and time data in real time through satellite tracking. It communicated with the ESP32 microcontroller via UART.
For a robust and reliable power supply, Li-Ion 18650 battery systems were used in parallel, achieving a total capacity of 7500 mAh and 3.7 V. This ensures uninterrupted operation, even in challenging conditions. Additionally, a waterproof power switch from Blue Robotics added a layer of control without compromising the system’s waterproofness. This set of electronic components, encapsulated in the buoys (
Figure 5), was crucial in developing and validating the prototype.
Field tests were conducted in Lake Jarun in Zagreb, Croatia, on 24 August 2023. During these tests, a system comprising three buoys and an underwater acoustic element (UAE) was deployed to evaluate the system’s performance. Of the three buoys, one acted as the central unit, responsible for orchestrating the range measurements and processing the data collected. This central buoy communicated with the two other buoys, which functioned solely as measurement nodes. When prompted by the central unit, these measurement nodes conducted range calculations relative to the UAE and promptly transmitted their results back to the central buoy for processing.
The UAE, positioned on an object equipped with an acoustic transmitter, was guided through the water by a surface boat. This configuration allowed the system to assess the UAE’s precise underwater location as it moved along its designated trajectory. The structured setup and communication between the central buoy, measurement nodes, and UAE enabled the collection of essential data regarding the system’s accuracy, responsiveness, and effectiveness in tracking and monitoring underwater acoustic elements.
Below, one of the successful messages sent by the buoy system is analysed:
24/08/2023 12:23:19 B1, RNG, 4.22, 45.779338836669918, 15.936838150024414, 81
24/08/2023 12:23:19 B2, RNG, 10.1, 45.779228210449218, 15.936708450317382, 81
24/08/2023 12:23:19 B3, RNG, 1.88, 45.779338836669918, 15.936790466308594, 81
The message was composed as follows:
where
Time: date and time formatted as dd/mm/yyyy hh:mm:ss.
B#: buoy to which the message belongs (B1: central unit, B2: bouy node 1, B3: bouy node 2).
RNG: range correctly calculated. Otherwise, it shows LOG.
Range: distance between the buoy and the underwater acoustic element, in meters.
Lat: latitude, in decimal degrees.
Lon: longitude, in decimal degrees.
e_GPS: error, in centimeters.
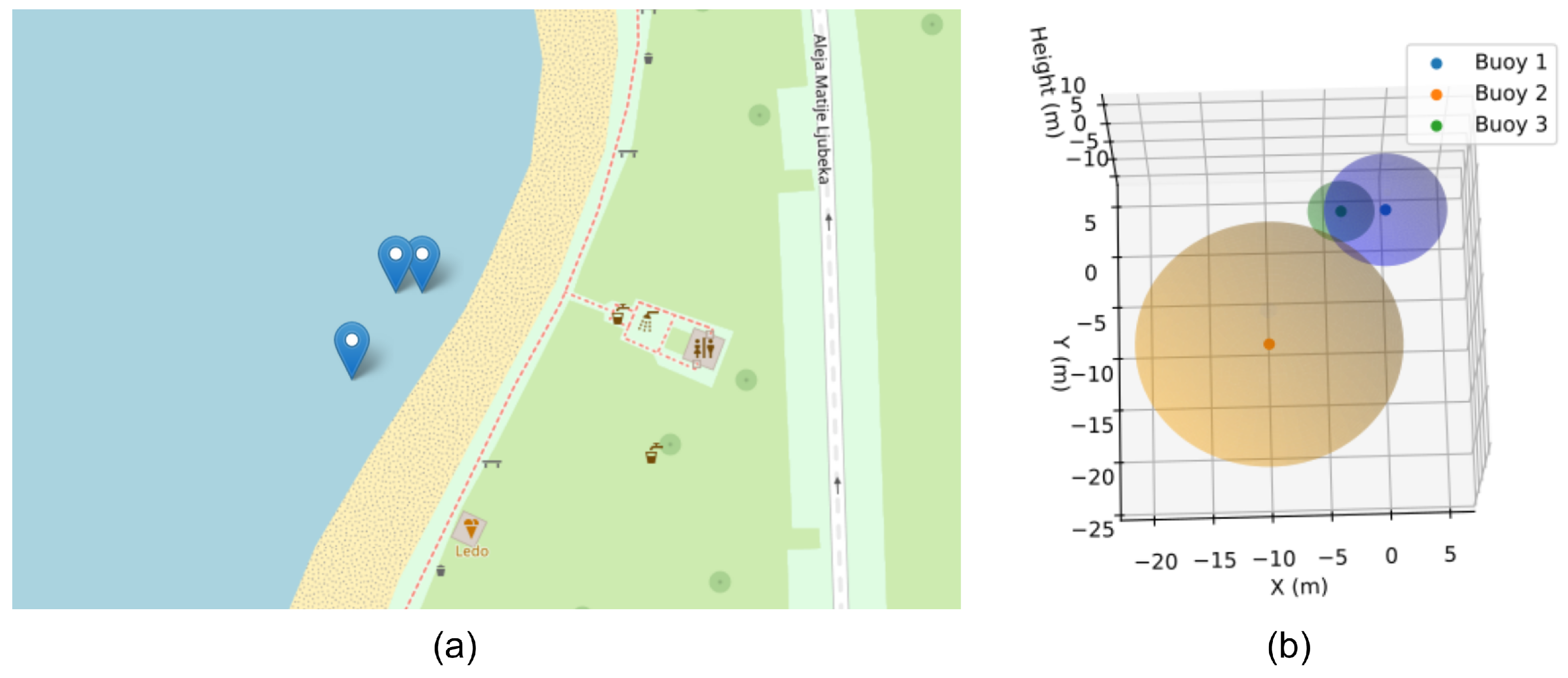
Each point, corresponding to the location of the buoys, was overlaid with a sphere that symbolised the distance to the UAE. The radius
of these spheres equaled the sum of the distance
between the buoy and the UAE plus the GPS error
margin and the error in the acoustic range measurement
(0.1 m according to the manufacturer), thus offering a detailed three-dimensional representation of the position and the uncertainty associated with each measurement (
Figure 6).
To obtain a graphical representation of the results, the data were processed using a spherical trilateration algorithm (Equation (
6)), in which each of the obtained points was accurately represented in space based on the known distances
between the buoys, taking one of them as the origin.
Figure 6 provides a 3D spatial visualisation of the buoy network and how the relative buoy distances are used to pinpoint the object’s position accurately. The approach effectively accounts for and visualises the uncertainty inherent in the measurements, offering a comprehensive view of the spatial configuration and accuracy of the localisation system.
In the future, buoys equipped with acoustic sensors can be utilised not only for localisation but also for the detection of diver bubbles. The ability to detect diver bubbles has significant practical implications for managing underwater cultural heritage, particularly in identifying unauthorised divers who may pose a threat to sensitive sites. By leveraging advanced techniques, such as the block-based threshold theory and IMCRA (BIED) method, the buoy system described in this section can detect diver bubbles at considerably greater distances than traditional methods, reaching up to 40 m under optimal conditions with signal enhancement and noise reduction [
58].
5. Conclusions and Future Work
The conservation of UCH is a matter of preserving not only our past but also resources of immense value for understanding our history. With climate change posing one of the most significant threats to UCH, it becomes imperative to harness available data and direct our research towards intelligent solutions.
The proposed platform and its implementation provide a robust, real-time approach to monitoring and managing UCH. Integrating IoUT with edge computing technologies allows for the effective processing and monitoring of UCH sites, improving system reliability and responsiveness even in environments with intermittent cloud connectivity. The case study of the buoy system highlights the effectiveness of this approach in achieving precise underwater localisation, overcoming the limitations of traditional GPS-based systems and validating the platform’s capability to track underwater assets in real-time.
However, while the initial results are promising, further work is needed to refine the platform’s capabilities. Future research should focus on extending the scalability of the system, allowing it to manage larger UCH sites with more complex environments and a greater number of deployed assets, while ensuring energy efficiency through the optimisation of power consumption. Enhancing the robustness and accuracy of the localisation algorithms, especially in highly dynamic underwater conditions, is another key area for improvement. Testing the system in more diverse and challenging marine environments will also be critical to ensuring its effectiveness and adaptability across different heritage sites.
Additionally, integrating machine learning models to automate data processing and risk assessment at the edge will further advance the platform’s ability to proactively manage and conserve UCH. The CNN-VAE model for risk assessment proposed in this work is currently theoretical and requires practical validation. Future efforts will focus on implementing and fine tuning the model using data collected from pilot sites. This will include optimising hyperparameters, evaluating the model’s performance in real-world conditions, and exploring alternative generative AI approaches. This practical validation is essential to ensure the applicability and robustness of the proposed AI-driven risk assessment tool.
Future work is targeted towards the practical application of this platform at the pilot sites of the TECTONIC project: the Bengala shipwreck near Isola di Capo Rizzuto in Italy, the ancient harbour of Aegina in Greece, and the shipwreck site of the HMS Swift in Argentina.


 ,
, 





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}