

Two-Dimensional Numerical Method for Predicting the Resistance of Ships in Pack Ice: Development and Validation


Abstract
1. Introduction
2. Ice Load Calculation and Ice Failure Criteria
2.1. Ice Load Calculation
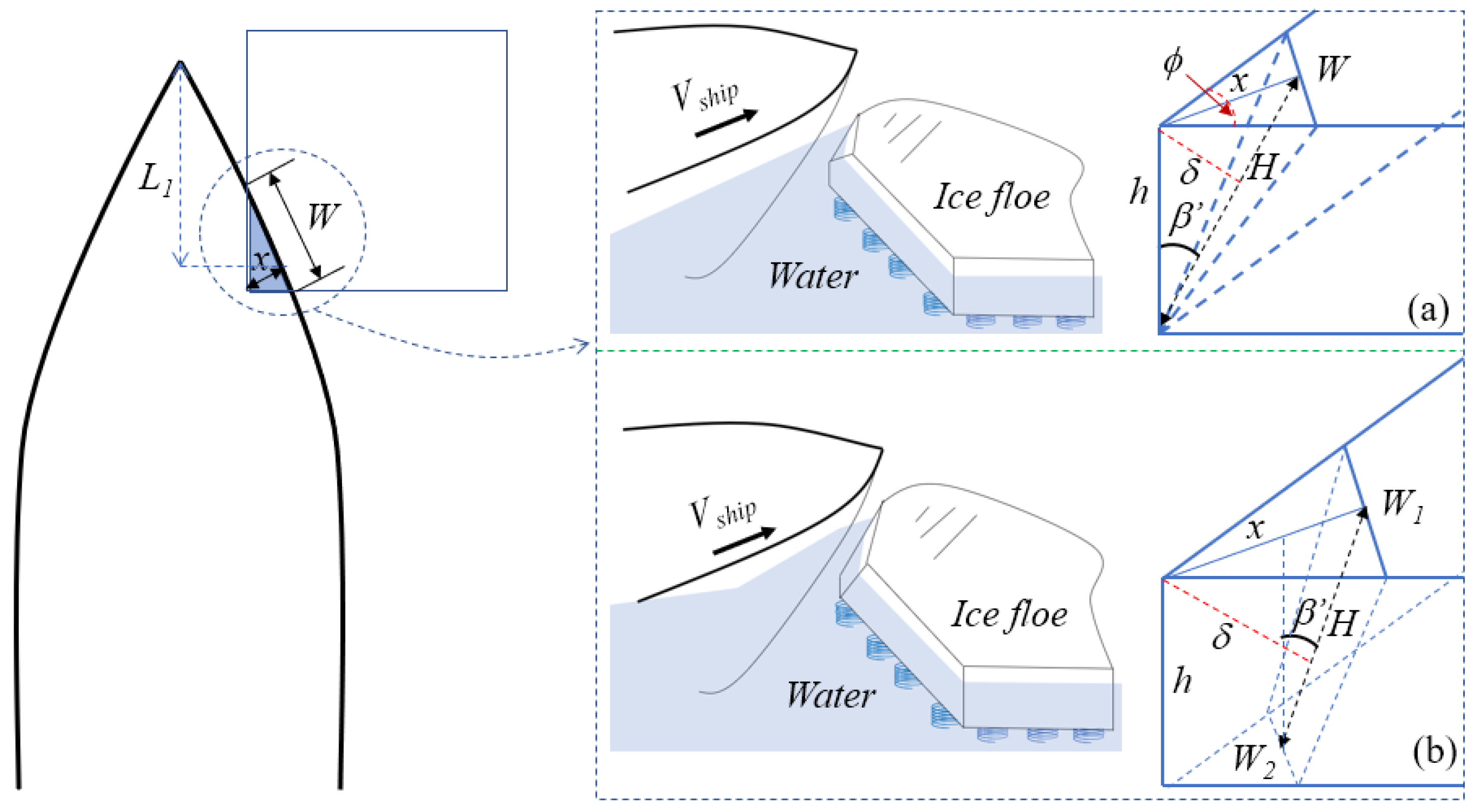
2.2. Maximum Depth of the Hull’s Penetration into an Ice Floe
2.3. Unbreakable Ice Floes
2.4. Breakable Ice Floes
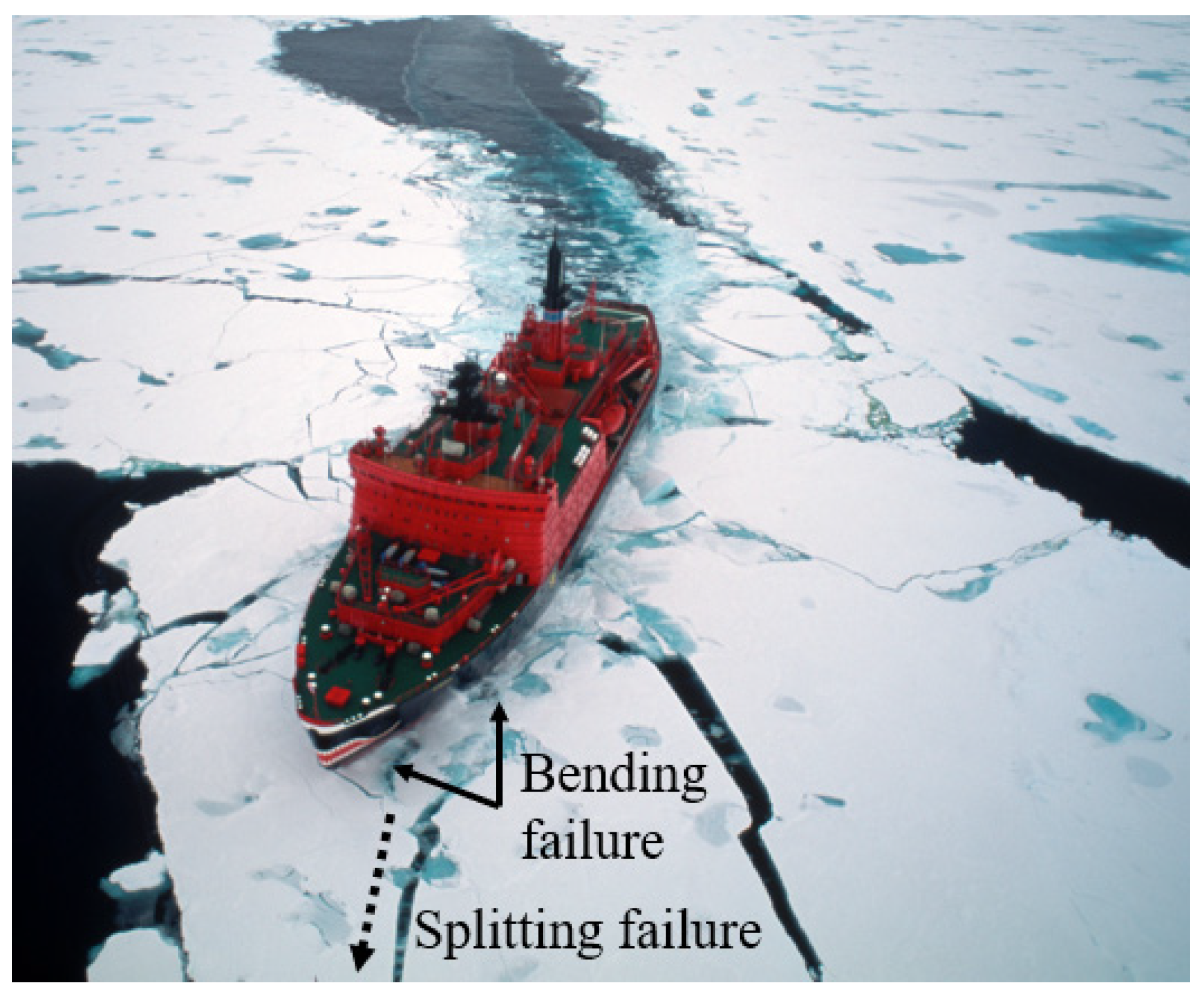
2.4.1. Bending Failure
2.4.2. Splitting Failure
3. Numerical Simulation Method for Ship Navigation in Ice-Covered Waters
3.1. General Assumptions
- (1)
- Kirchhoff Plate Model: The ice floe was modeled as a Kirchhoff plate, which is supported by a Winkler elastic foundation of seawater. According to Ventsel [37], the ratio of the characteristic length of the plate to its thickness should be greater than 10. Based on research by Lu et al. [15] and Gold [38] on sea ice, the characteristic length of sea ice is approximated to be 13.5 times the ice thickness. Consequently, the appropriate thickness limit for applying Kirchhoff plate theory is h < 3.32 m, which encompasses the range of most observed ice thicknesses.
- (2)
- Brittle Material Assumption: Sea ice was treated as a brittle material. The loading rate during the ship’s interaction with the ice is sufficiently high to inhibit creep behavior.
- (3)
- Material Homogeneity and Isotropy: This study focused on first-year sea ice, which is largely columnar in structure and demonstrates various anisotropic mechanical behaviors (Sanderson [16]) along with temperature gradients that occur along the ice thickness. However, because radial and circumferential fractures typically develop perpendicular to the columnar structure, it is reasonable to treat the ice as isotropic and overlook the impacts of temperature fluctuations.
- (4)
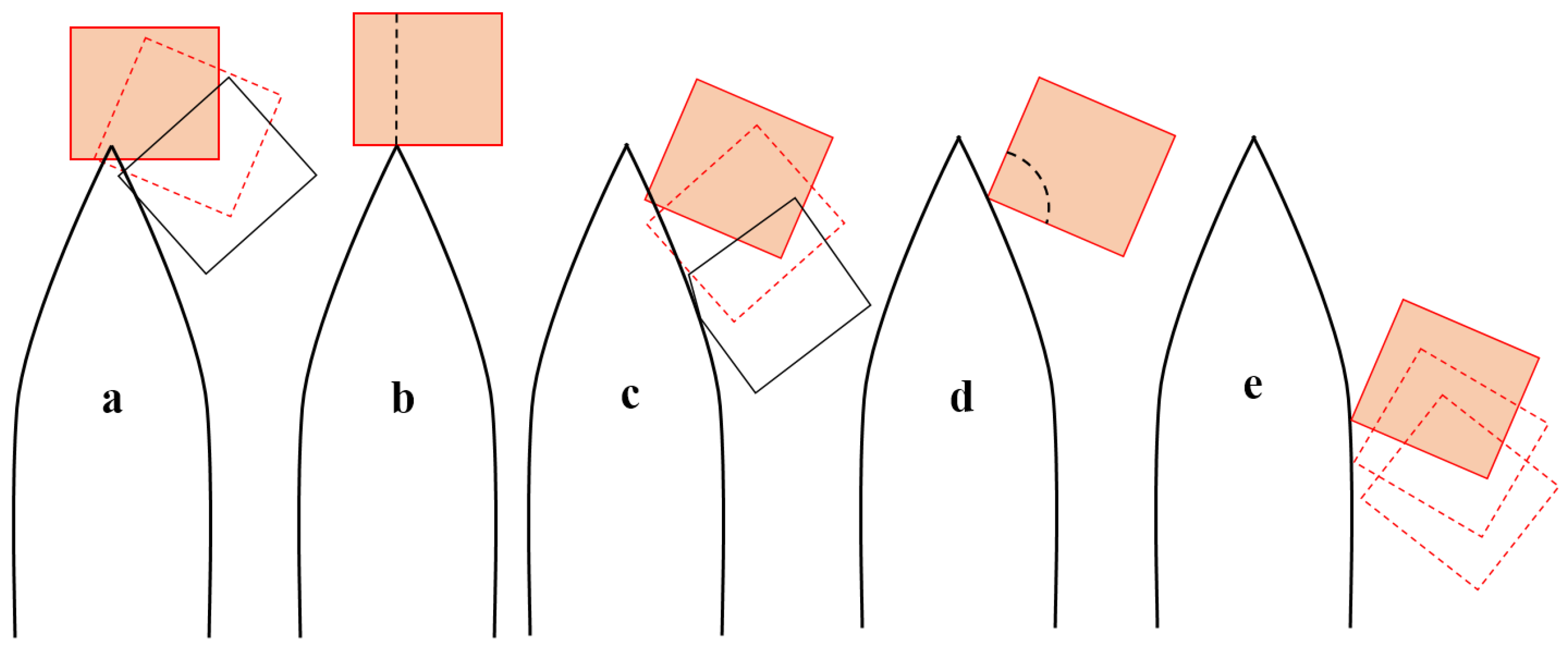
- Geometry of Ice Floes: According to Hamilton [39], downstream-managed ice floes often present a 1:1 aspect ratio. Although circular ice floes are more commonly found at the edges of ice-covered regions, for this theoretical exploratory study, the assumption of square ice floes was considered suitable. This approach is consistent with assumptions used in ice tank testing processes, as documented by Hoving [40].
- (5)
- Dynamic Fluid Base Effects: The dynamic effects of the fluid base on the ice floe were neglected, with a focus on the resistance characteristics.
3.2. Deflection Equation and Analytical Solution
3.3. Analysis of the Ship–Ice Collision Process
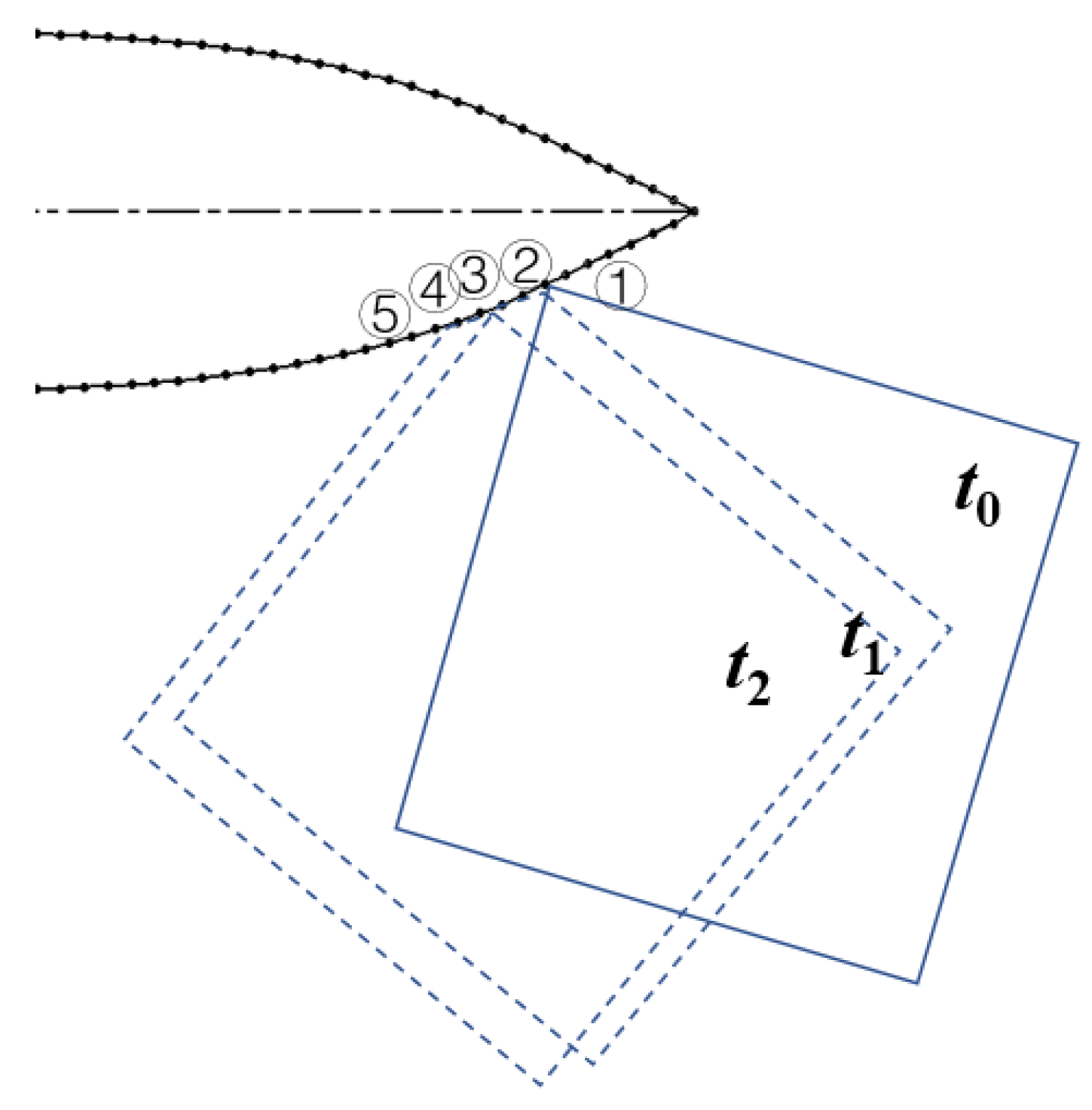
3.3.1. Movement of Ice Along the Ship Hull
- (1)
- At t0, the ice load is applied to station ①, representing the initial point of contact.
- (2)
- At t1, the ice load is evenly distributed at stations ② and ③, simulating the spreading of forces as the ship continues to move through the ice.
- (3)
- At t2, the load is further spread to stations ④ and ⑤.
3.3.2. Analysis of Ice Movement
3.4. Collision Detection Algorithm
3.4.1. Sweep and Prune Algorithm (SAP)
- (1)
- Recording Corner Coordinates: The coordinates of the corners of all Axis-Aligned Bounding Boxes (AABBs) are recorded in separate lists for the X- and Y-axes. As shown in Figure 10a, the minimum (1L) and maximum (1U) values of the x-axis and of the minimum (1L) and maximum (1U) values of the y-axis of object 1 have been added in Figure 10b.
- (2)
- Sorting the Lists: These lists of Figure 10b are sorted in ascending order based on the coordinates. This sorting process is crucial, as it allows the algorithm to efficiently prune non-colliding pairs in the subsequent steps.
- (3)
- Intersection of Bounding Boxes: Overlapping intervals are checked in the sorted lists, as shown in Figure 10b. The intersection of bounding boxes is confirmed when their intervals overlap in both the X and Y lists. For example, the intersection of bounding boxes corresponding to objects 2 and 3 indicates that they are potential collision pairs.
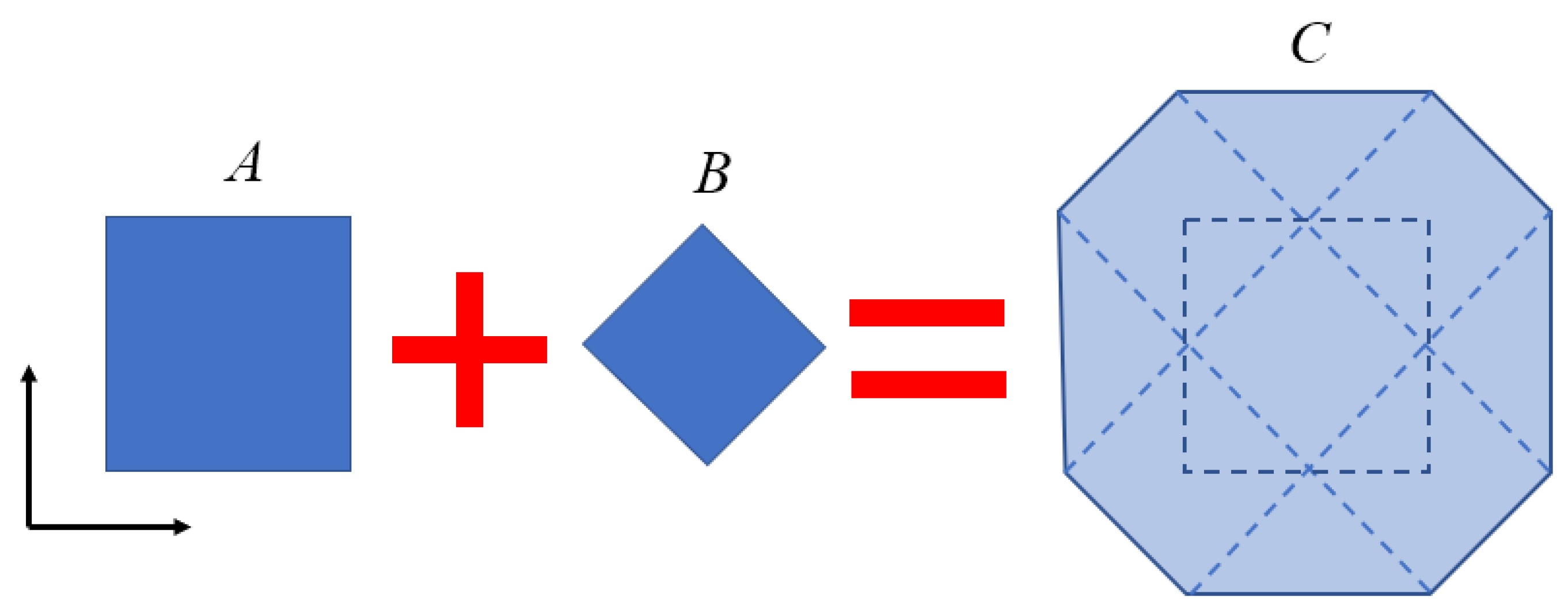
3.4.2. Gilbert–Johnson–Keerthi (GJK) Algorithm
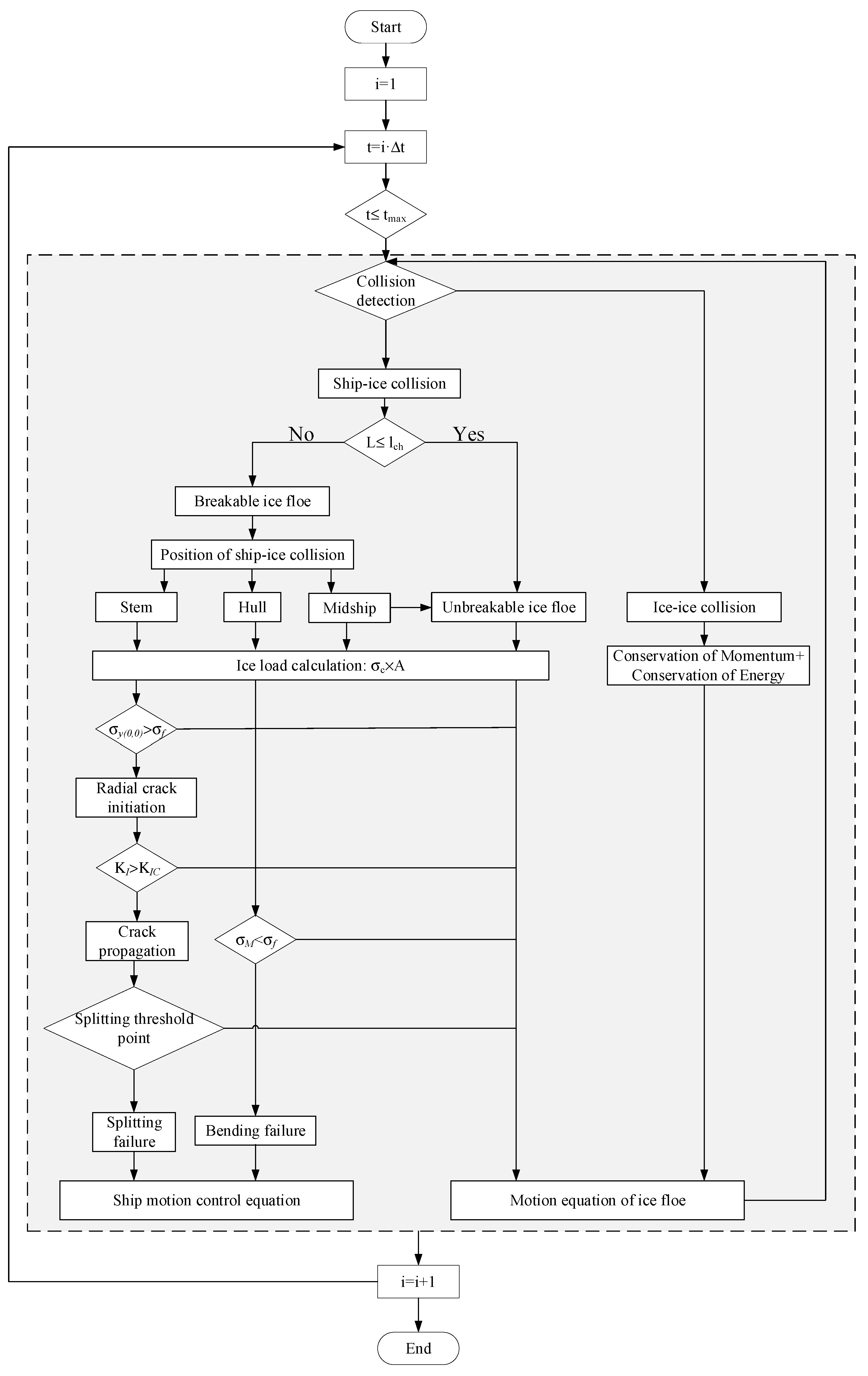
3.5. Process of Numerical Simulation
4. Verification of the Accuracy of the Numerical Simulation Method
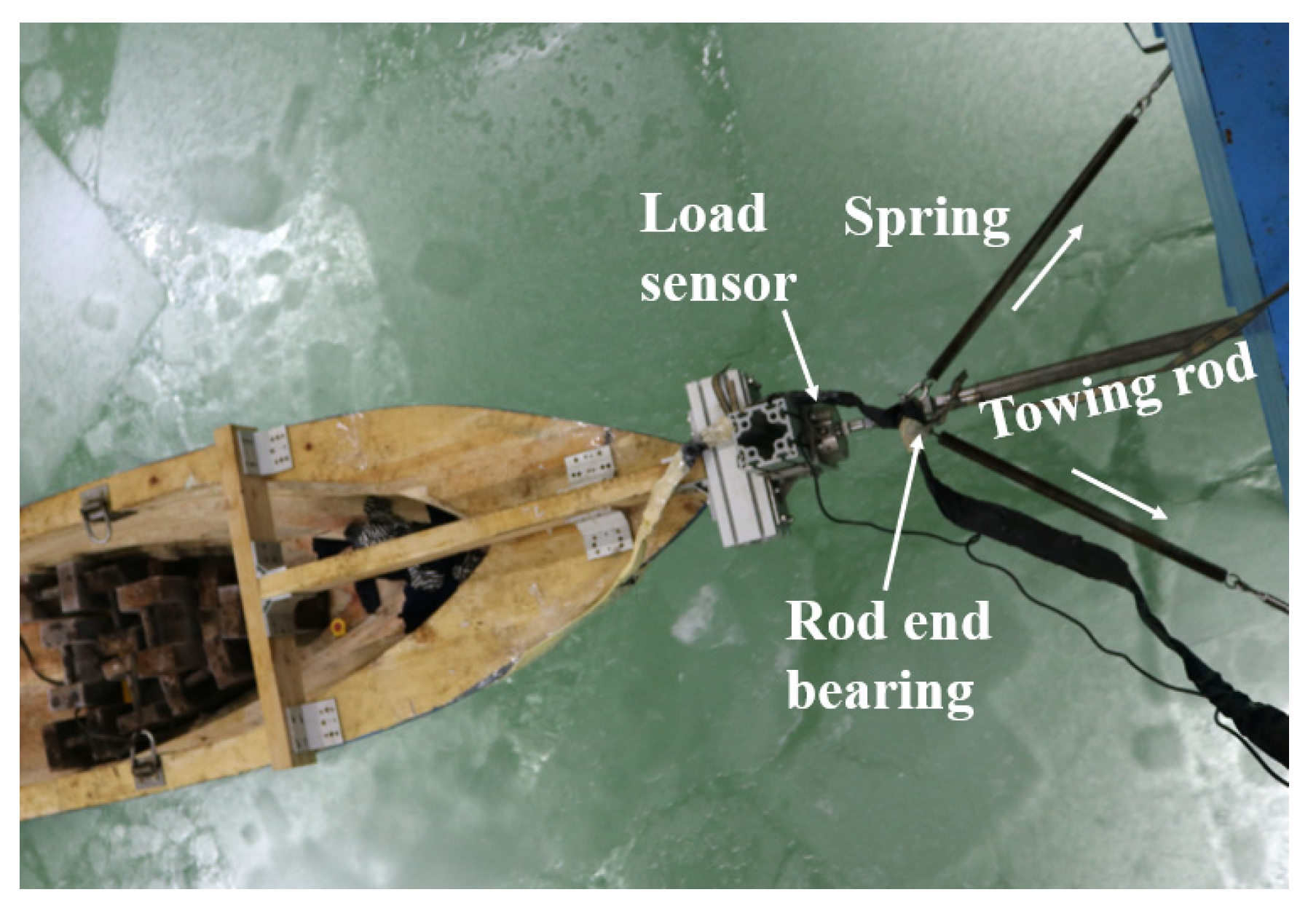
4.1. Test Facility
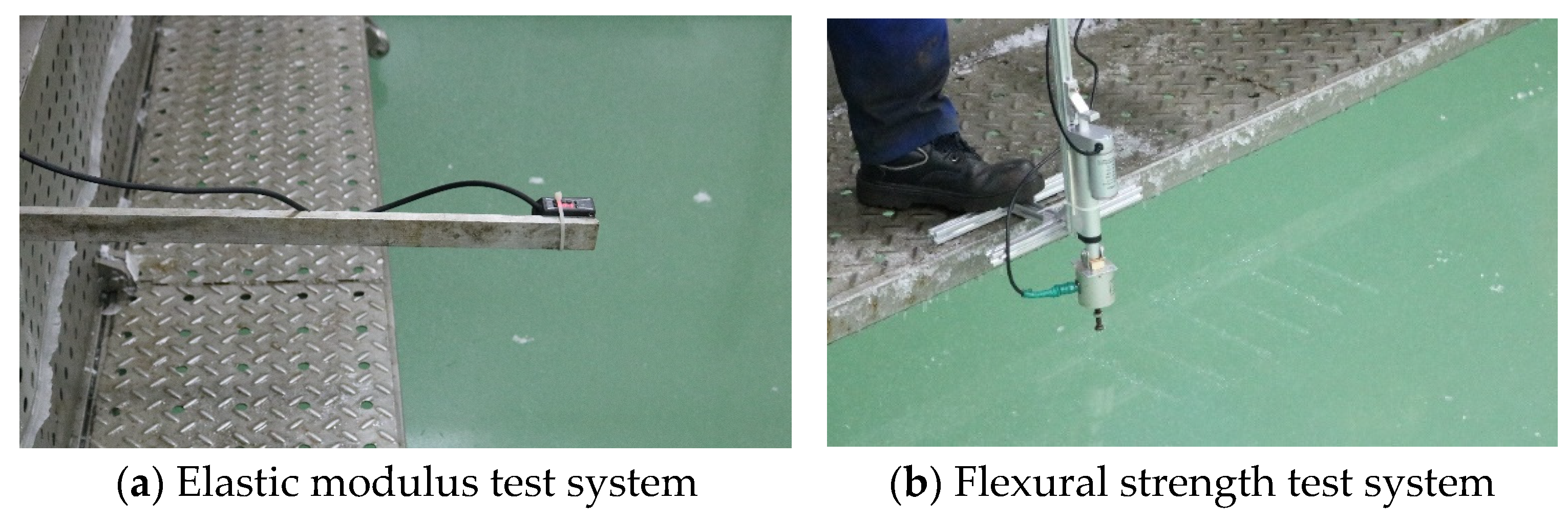
4.2. Measurement System for the Mechanical Properties of the Model Ice
4.2.1. Elastic Modulus Test
4.2.2. Flexural Strength Test
4.2.3. Compressive Strength Test
4.3. Test Conditions
4.4. Iterative Time Step
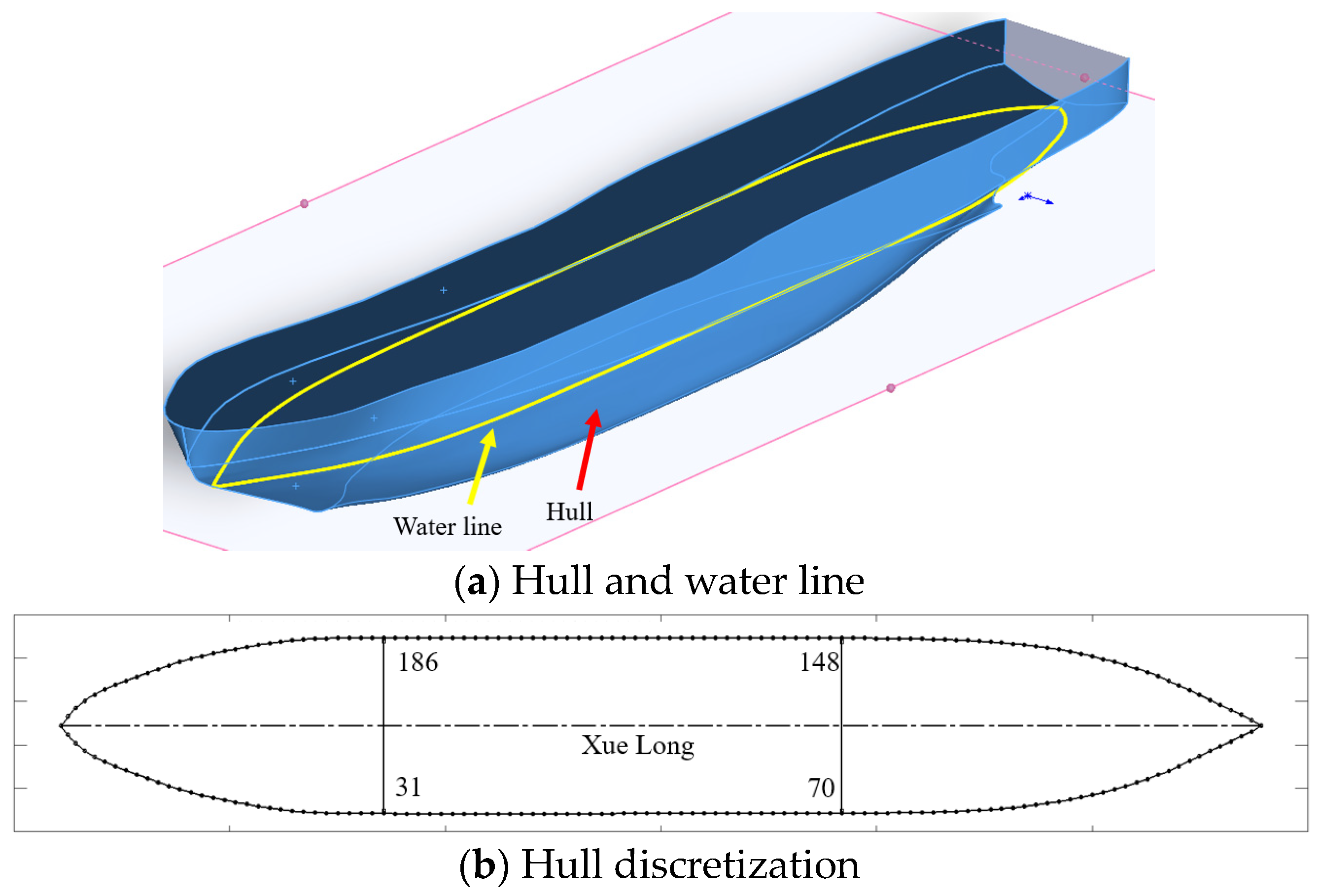
4.5. Discretization of the Ship
4.6. Results
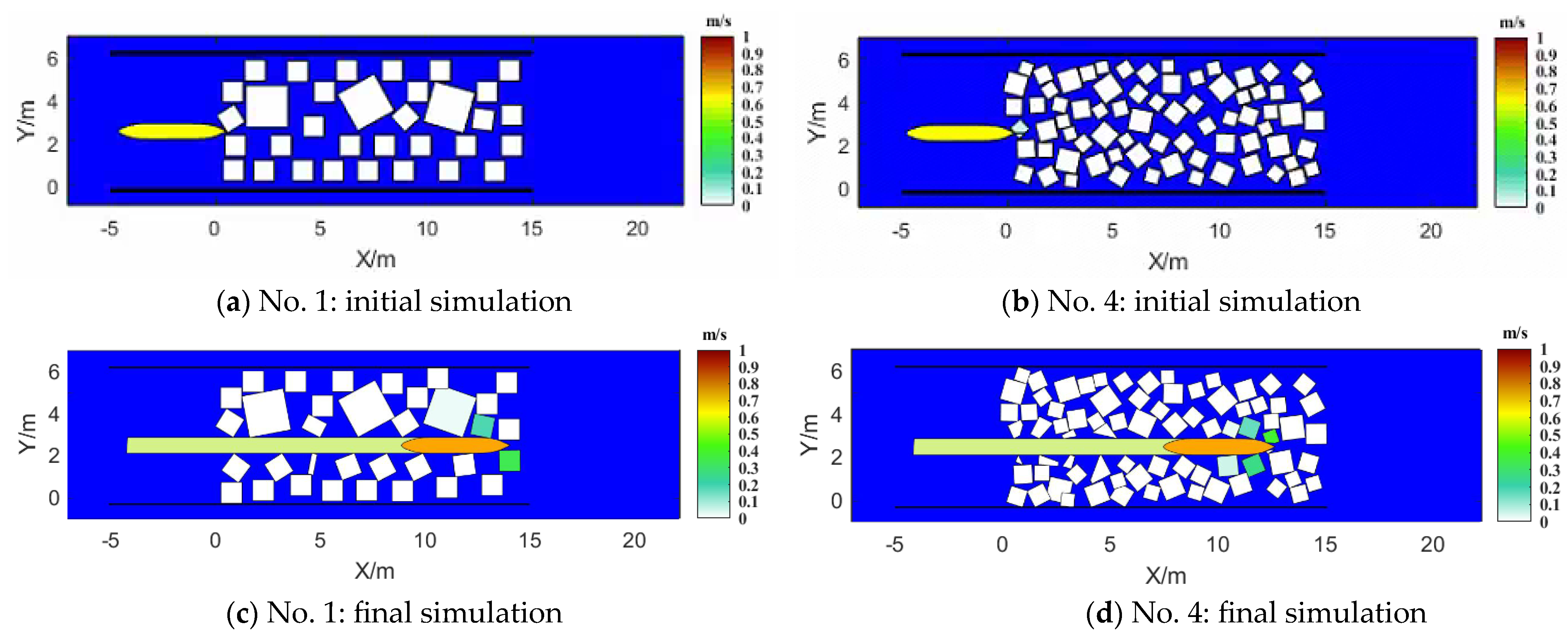
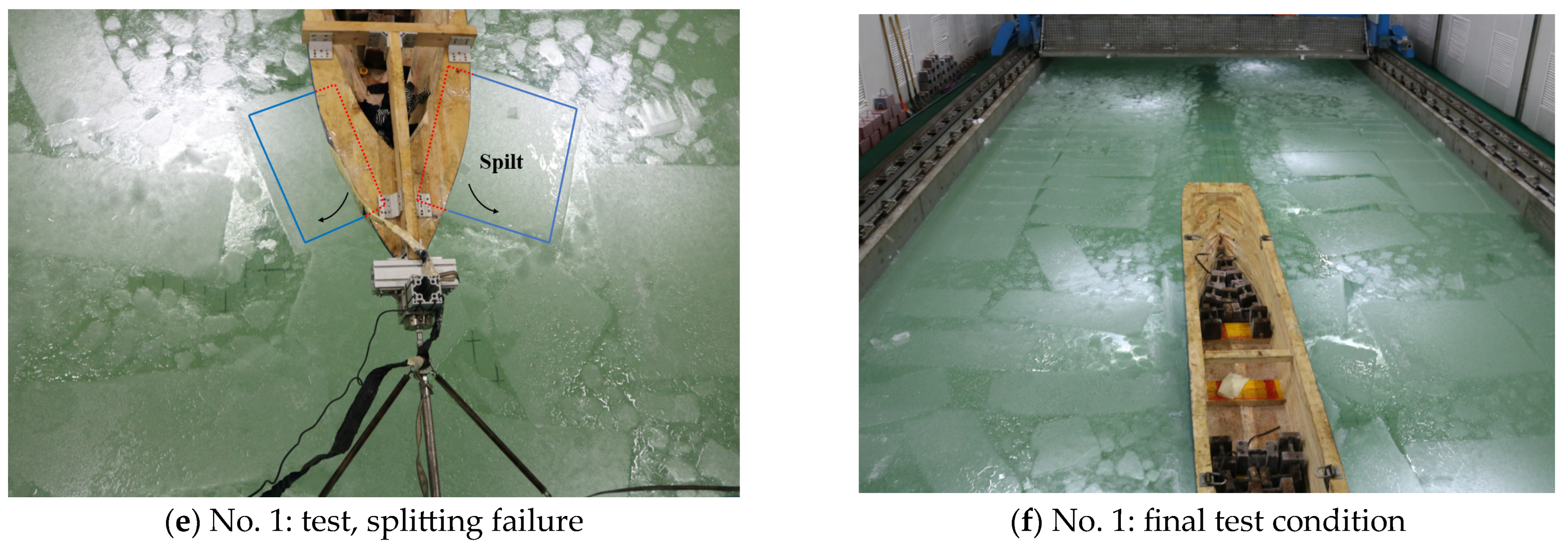
4.6.1. Comparison of Test Phenomena
4.6.2. Comparison of Resistance Time History and Average Resistance
5. Conclusions
- (1)
- A theory used to identify the splitting fracture and bending failure of ice was developed. The initiation of a crack is determined by whether the transverse stress is greater than the bending strength. The extension process of the crack is derived based on LFEMs. The criterion for splitting failure is defined as whether a crack propagates to 14.5% of the length of the ice. The criterion for bending failure is defined as whether maximum principal stress is larger than the bending strength.
- (2)
- The kinematics of ice were derived, and a collision detection algorithm was developed based on the SAP and GLK algorithms. Closed-form solutions for the stress distribution of ice were calculated based on Symplectic Mechanics and Hooke’s law. A program for predicting the resistance of ship navigation in pack ice was developed and the theories mentioned above.
- (3)
- A series of model tests were conducted in an ice tank to validate the numerical simulations. Comparisons between the numerical simulations and the model tests demonstrated that the numerical simulations accurately replicated the observed interactions between the ship and ice. The ice failure modes of sliding, splitting, and bending observed in the simulations closely matched those in the model tests. The total discrepancy between the calculated average navigation resistance and the resistance observed in the model tests was 9.05%.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Huang, Y.; Sun, C.; Sun, J. Route Planning of a Polar Cruise Ship Based on the Experimental Prediction of Propulsion Performance in Ice. J. Mar.Sci. Eng. 2023, 11, 1655. [Google Scholar] [CrossRef]
- Yang, B.; Zhang, G.; Rao, H.; Wang, S.; Yang, B.; Sun, Z. Numerical simulation of the maneuvering performance of ships in broken ice area. Ocean Eng. 2024, 294, 116783. [Google Scholar] [CrossRef]
- Li, F.; Huang, L. A Review of Computational Simulation Methods for a Ship Advancing in Broken Ice. J. Mar. Sci. Eng. 2022, 10, 165. [Google Scholar] [CrossRef]
- Zhong, K.; Ni, B.-Y.; Li, Z. Direct measurements and CFD simulations on ice-induced hull pressure of a ship in floe ice fields. Ocean Engineering. 2023, 272, 113523. [Google Scholar] [CrossRef]
- Tang, X.; Zou, M.; Zou, Z.; Li, Z.; Zou, L. A parametric study on the ice resistance of a ship sailing in pack ice based on CFD-DEM method. Ocean Eng. 2022, 265, 112563. [Google Scholar] [CrossRef]
- Yang, B.; Sun, Z.; Zhang, G.; Yang, B.; Lubbad, R. Non-smooth discrete element method analysis of channel width’s effect on ice resistance in broken ice field. Ocean Eng. 2024, 313, 119419. [Google Scholar] [CrossRef]
- Kim, J.; Yoon, D.H.; Choung, J. Numerical study of ship hydrodynamics on ice resistance during ice sheet breaking. Ocean Engineering. 2024, 308, 118285. [Google Scholar] [CrossRef]
- Zou, M.; Tang, X.-J.; Zou, L.; Zou, Z.-J.; Zhang, X.-S. Numerical investigations of the restriction effects on a ship navigating in pack-ice channel. Ocean Eng. 2024, 305, 117968. [Google Scholar] [CrossRef]
- Daley, C. IACS Unified Requirements for Polar Ships Background Notes to Design Ice Loads. June 2000. Available online: https://www.engr.mun.ca/~cdaley/9093/PC_Ship-Ice%20Loads.pdf. (accessed on 1 October 2024).
- Daley, C. IACS Unified Requirements for Polar Ships Background Notes to Longitudinal Strength. 31 May 2000. Available online: https://www.engr.mun.ca/~cdaley/9093/PC_S_LONGL.pdf. (accessed on 1 October 2024).
- ISO 19906; Petroleum and Natural Gas Industries—Arctic Offshore Structures. ISO: Geneva, Switzerland, 2019.
- Su, B.; Riska, K.; Moan, T. A numerical method for the prediction of ship performance in level ice. Cold Reg. Sci. Technol. 2010, 60, 177–188. [Google Scholar] [CrossRef]
- van den Berg, M.; Lubbad, R.; Løset, S. An implicit time-stepping scheme and an improved contact model for ice structure interaction simulations. Cold Reg. Sci. Technol. 2018, 155, 193–213. [Google Scholar] [CrossRef]
- Sawamura, J. 2D numerical modeling of icebreaker advancing in ice-covered water. Int. J. Nav. Archit. Ocean. Eng. 2018, 10, 385–392. [Google Scholar] [CrossRef]
- Lu, W.; Lubbad, R.; Løset, S. Out-of-plane failure of an ice floe: Radial-crack initiation-controlled fracture. Cold Regions Science and Technology. 2015, 119, 183–203. [Google Scholar] [CrossRef]
- Masterson, D.M.; Frederking, R.M.W.; Wright, B.; Kärnä, T.; Maddock, W.P. A revised ice pressure–area curve. In Proceedings of the 19th International Conference on Port and Ocean Engineering under Arctic Conditions, Dalian, China, 27–30 June 2007; Volume 1, pp. 305–314. [Google Scholar]
- Sun, J.; Huang, Y. Investigations on the ship-ice impact: Part 1. Experimental methodologies. Mar. Struct. 2020, 72, 102772. [Google Scholar] [CrossRef]
- Lubbad, R.; Løset, S. A numerical model for real-time simulation of ship–ice interaction. Cold Reg. Sci. Technol. 2011, 65, 111–127. [Google Scholar] [CrossRef]
- Lu, W.; Lubbad, R.; Løset, S. In-plane fracture of an ice floe: A theoretical study on the splitting failure mode. Cold Reg. Sci. Technol. 2015, 110, 77–101. [Google Scholar] [CrossRef]
- Kim, E.; Lu, W.; Lubbad, R.; Løset, S.; Amdahl, J. Toward a holistic load model for structures in broken ice. In Proceedings of the 23rd International Conference on Port and Ocean Engineering under Arctic Conditions, Trondheim, Norway, 14–18 June 2015. [Google Scholar]
- Li, R.; Zhong, Y.; Li, M. Analytic bending solutions of free rectangular thin plates resting on elastic foundations by a new symplectic superposition method. Proc. R. Soc. A 2013, 469, 20120681. [Google Scholar] [CrossRef]
- Lindqvist, G. A straightforward method for calculation of ice resistance of ships. In Proceedings of the 10th International Conference on Port and Ocean Engineering under Arctic Conditions, Lulea, Sweden, 12–16 June 1989; pp. 722–735. [Google Scholar]
- Valanto, P. The resistance of ships in level ice. SNAME Trans. 2001, 109, 53–83. [Google Scholar]
- Lamb, H. Hydrodynamics; Cambridge University Press: Cambridge, UK, 1995. [Google Scholar]
- Zong, Z.; Zhou, L. A theoretical investigation of ship ice resistance in waters covered with ice floes. Ocean Eng. 2019, 186, 106114. [Google Scholar] [CrossRef]
- Hetényi, M. Beams on Elastic Foundation, 1st ed.; University of Michigan Press: Ann Arbor, MI, USA, 1946. [Google Scholar]
- Kerr, A.D. The bearing capacity of floating ice plates subjected to static or quasi-static loads. J. Glaciol. 1976, 17, 76. [Google Scholar]
- Nevel, D.E. Bending and Buckling of a Wedge on an Elastic Foundation. In Physics and Mechanics of Ice; Springer: Berlin/Heidelberg, Germany, 1980. [Google Scholar]
- Paavilainen, J.; Tuhkuri, J.; Polojärvi, A. 2D combined finite-discrete element method to model multi-fracture of beam structures. Eng. Comput. 2009, 26, 578–598. [Google Scholar] [CrossRef]
- Bhat, S.U. Analysis for splitting of ice floes during summer impact. Cold Reg. Sci. Technol. 1988, 15, 53–63. [Google Scholar] [CrossRef]
- Bhat, S.U.; Choi, S.K.; Wierzbicki, T.; Karr, D.G. Failure analysis of impacting ice floes. J. Offshore Mech. Arct. Eng. 1991, 113, 171. [Google Scholar] [CrossRef]
- Wang, S.; Dempsey, J.P. A cohesive edge crack. Eng. Fract. Mech. 2011, 78, 1353–1373. [Google Scholar] [CrossRef]
- Wang, Y.; Poh, L.H. Initial-contact-induced bending failure of a semi-infinite ice sheet with a radial-before-circumferential-crack pattern. Cold Reg. Sci. Technol. 2019, 168, 102866. [Google Scholar] [CrossRef]
- Wu, X.R. A review and verification of analytical weight function methods in fracture mechanics. Fatigue Fract. Eng. Mater. Struct. 2019, 42, 2017–2042. [Google Scholar] [CrossRef]
- Wu, X.-R.; Xu, W. Weight Function Methods in Fracture Mechanics; Springer: Singapore, 2022. [Google Scholar]
- Tada, H.; Paris, P.C.; Irwin, G.R. The Stress Analysis of Cracks Handbook 130; ASME Press: New York, NY, USA, 2000. [Google Scholar]
- Ventsel, E.; Krauthammer, T. Thin Plates and Shells: Theory: Analysis, and Applications; CRC Press: New York, NY, USA, 2001. [Google Scholar]
- Gold, L.W. Use of ice covers for transportation. Can. Geotech. J. 1971, 8, 170–181. [Google Scholar] [CrossRef]
- Hamilton, J.; Holub, C.; Blunt, J.; Mitchell, D.; Kokkinis, T. Ice management for support of arctic floating operations. In Proceedings of the OTC Arctic Technology Conference, Houston, TX, USA, 7–9 February 2011. [Google Scholar]
- Hoving, J.S.; Vermeulen, R.; Mesu, A.W.; Cammaert, A.B. Experiment-based relations between level ice loads and managed ice loads on an arctic jack-up structure. In Proceedings of the 22nd International Conference on Port and Ocean Engineering under Arctic Conditions, Espoo, Finland, 9–13 June 2013. [Google Scholar]
- Yang, B. Research on Prediction Method and Influence Law of Ice Resistance of Ship in Broken Ice Conditions. Ph.D. Thesis, Dalian University of Technology, Dalian, China, 2022. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Meaning of Symbol | Unit |
|---|---|---|
| q(x,y) | Concentrated load | N |
| w(x,y) | Transverse deflection at point (x, y) of the plate in the z-direction under a lateral concentrated load | m |
| hice | Thickness of the ice floe | m |
| E | Young’s modulus of ice | Pa |
| v | Poisson’s ratio | - |
| Flexural rigidity of the plate with symbols explained below | Nm | |
| Biharmonic operator | - | |
| ρw | Fluid density | kg/m3 |
| g | Gravitational acceleration | m/s2 |
| k = ρw × g | Foundation modulus | Pa/m |
| Parameter | Model Scale | Full Scale |
|---|---|---|
| Waterline length (m) | 5.567 | 167.01 |
| Waterline breadth (m) | 0.753 | 22.59 |
| Draught (m) | 0.267 | 8.01 |
| Displacement (ton) | 0.779 | 21,025 |
| Block coefficient | 0.696 | |
| Wetted surface area (m2) | 7.02 | 6319.3 |
| No. | Ice Thickness (m) | Concentration | Speed (m/s) |
|---|---|---|---|
| 1 | 0.5 | 50% | 188 |
| 2 | 282 | ||
| 3 | 376 | ||
| 4 | 70% | 188 | |
| 5 | 282 | ||
| 6 | 376 |
| Parameter | Value |
|---|---|
| Ice density | 900 kg/m3 |
| Ice modulus of elasticity | 102.68 MPa |
| Poisson’s ratio | 0.3 |
| Water density | 1025 kg/m3 |
| Acceleration of gravity | 9.81 m/s2 |
| Flexural strength of ice | 38.4 kPa |
| Compressive strength | 107.52 kPa |
| Hull–ice friction coefficient | 0.07 |
| No. | Speed (mm/s) | Iterative Time Step (s) |
|---|---|---|
| 1 | 188 | 0.0034 |
| 2 | 282 | 0.0015 |
| 3 | 376 | 0.0009 |
| 4 | 188 | 0.0034 |
| 5 | 282 | 0.0015 |
| 6 | 376 | 0.0009 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, Y.; Sun, C.; Sun, J. Two-Dimensional Numerical Method for Predicting the Resistance of Ships in Pack Ice: Development and Validation. J. Mar. Sci. Eng. 2024, 12, 2251. https://doi.org/10.3390/jmse12122251
Huang Y, Sun C, Sun J. Two-Dimensional Numerical Method for Predicting the Resistance of Ships in Pack Ice: Development and Validation. Journal of Marine Science and Engineering. 2024; 12(12):2251. https://doi.org/10.3390/jmse12122251
Chicago/Turabian StyleHuang, Yan, Ce Sun, and Jianqiao Sun. 2024. "Two-Dimensional Numerical Method for Predicting the Resistance of Ships in Pack Ice: Development and Validation" Journal of Marine Science and Engineering 12, no. 12: 2251. https://doi.org/10.3390/jmse12122251
APA StyleHuang, Y., Sun, C., & Sun, J. (2024). Two-Dimensional Numerical Method for Predicting the Resistance of Ships in Pack Ice: Development and Validation. Journal of Marine Science and Engineering, 12(12), 2251. https://doi.org/10.3390/jmse12122251