
Unlocking the Ocean 6G: A Review of Path-Planning Techniques for Maritime Data Harvesting Assisted by Autonomous Marine Vehicles



Abstract
1. Introduction
1.1. Background
1.2. Survey of Surveys
- This is the first review article on a holistic vision of the path-planning techniques for AMV-assisted oceanic data harvesting missions.
- An extensive search of existing literature has been undertaken, enabling us to present a general portrayal of the current state of research within the academic community.
- Our review encompasses detailed insights into system architectures, problem formulations, objective functions, and the pertinent constraints associated with data harvesting in the marine domain.
- A thorough investigation and consolidation of various algorithms, methodologies, platforms, tools, coding environments, and their practical implementations are meticulously presented, providing a comprehensive knowledge resource for readers.
- We introduce and explore the emerging challenges of path planning techniques in the context of oceanic data harvesting. Additionally, we engage in a forward-looking discussion concerning potential trends for future research.
2. Fundamental Models and Literature Search
2.1. System Model
2.1.1. Distributed Network
2.1.2. Collection with Fixed Path
2.1.3. Clustering or Layering Network
2.2. Planning Model
2.2.1. Objectives
- Travel length [21,22,23,24]: The consideration of travel length holds paramount significance in path planning for oceanic data collection. By strategically planning routes that minimize travel distance, various operational advantages are attainable. Firstly, reduced travel distances result in lower energy consumption for vehicles or sensor nodes, thereby prolonging their operational lifespan. Moreover, shorter travel distances enable faster data collection and response times, crucial for real-time monitoring and decision-making in applications such as environmental monitoring or disaster response.
- Energy consumption of nodes [25,26,27]: Energy consumption of the network consists of three parts, the transmission energy , the receiving energy , and the idle energy . refers to the energy expended when nodes send data packets to each other. The amount of transmission energy used is influenced by factors such as the frequency at which data are transmitted and the distance between the devices. refers to the energy used by nodes when they receive data packets from other nodes. The energy consumption for receiving depends on factors like the data rate, modulation schemes, and processing complexity. represents the energy consumed by nodes when they are not actively transmitting or receiving data packets. Even when nodes are not actively sending or receiving, they still use a certain amount of energy to maintain their operational state, listen for incoming messages, and stay connected to the network. This idle energy consumption is often referred to as “quiescent” or “standby” energy. For a more detailed model explanation, readers may refer to [28,29]. Moreover, some scholars have expanded the energy consumption to network lifetime [30,31]. This refers to the duration until the first node becomes non-operational. Consequently, the node exhibiting the most substantial energy consumption emerges as the pivotal factor influencing this lifespan.
- Energy consumption utility [32]: The energy consumption utility parameter, denoted as , encapsulates the balance between energy consumption () and the cumulative network throughput (). The quantification of denotes the energy consumption of the sensor network, while the network throughput hinges on the magnitude of data packet transmission during the operational sequence. Fundamentally, is calculated as the ratio of network throughput to energy consumption . By encapsulating this trade-off, provides a comprehensive measure of the network’s efficiency in converting energy inputs into valuable data outputs. Rather than solely focusing on minimizing energy usage, optimizing the energy consumption utility leads to a greater proportion of energy being allocated to data transmission, ultimately enhancing overall efficiency.
- Data collection time/Collection delay [26,33,34]: Collection delay is one of the most important optimization terms. In contrast to electromagnetic waves, the conveyance of underwater signals predominantly relies upon acoustic waves. However, the velocity of sound waves in an underwater environment is constrained to 1500 m/s. In order to ensure the quality of online data, the AMV needs to complete data collection tasks within a shorter timeframe. Evidently, the most straightforward approach involves increasing the AMV’s velocity. Nevertheless, this method is hindered by the limitations imposed by water flow resistance and hardware capacities, and achieving such improvement could be challenging. Therefore, the most effective way to reduce data collection time is by optimizing the path length. Generally, data collection time comprises two components. The first component is the travel time of the AMV, while the second component involves the time slot allocation for time-division multiple access (TDMA), which constitutes the total residence time of the AMV at the cluster head nodes.
- Energy consumption of AMV [35,36,37]: The energy consumed by the AMV is made up of three main components: hotel energy, propulsion energy, and maneuvering energy. The first one refers to the energy consumed by the AMV for all its non-movement-related activities or systems. These activities could include maintaining the necessary onboard systems, sensors, communication devices, and other equipment that are essential for the AMV’s operation but are not directly related to its movement along the path. The propulsion energy is required for the AMV to move along the designated path segment. It involves motors, propellers, or any other mechanisms that generate thrust and propel the AMV forward through the water. Furthermore, the work in [35] has demonstrated that the maneuvering of the AMV within the turning line segment is considerably influenced by the intricate ocean environment. The process of maneuvering encompasses alterations in direction, depth, or orientation, which are necessitated by obstacle avoidance, bearing currents, and other variables affecting the trajectory of the AMV. This dynamic can potentially result in a significant rise in both travel time and energy consumption. Therefore, the significance of maneuvering energy cannot be understated either.
- Value of information (VoI) [38,39,40]: The VoI is used to reflect the importance of data and its sensitivity to time. Many studies drive an AMV to select the nearest sensor (or data collector) based on geographic proximity for its next visit. However, this geographical closeness does not inherently capture the VoI related to physical parameters registered by sensors. These parameters might significantly differ concerning event significance and timeliness [41]. Consequently, an optimal path determined solely by geographic closeness might yield limited value, making a negligible contribution to the overall accumulation of valuable data. Some applications exhibit time-sensitive characteristics, implying that VoI peaks when sensor data are captured, gradually diminishing as time elapses until the data reach the base station. Delayed data transmission leads to reduced VoI at the base station, hindering the effective analysis and response to monitoring necessities.
2.2.2. Constraints
2.3. Literature Search
3. Review of Path-Planning Techniques for Data Harvesting
3.1. Meta-Heuristic Methods
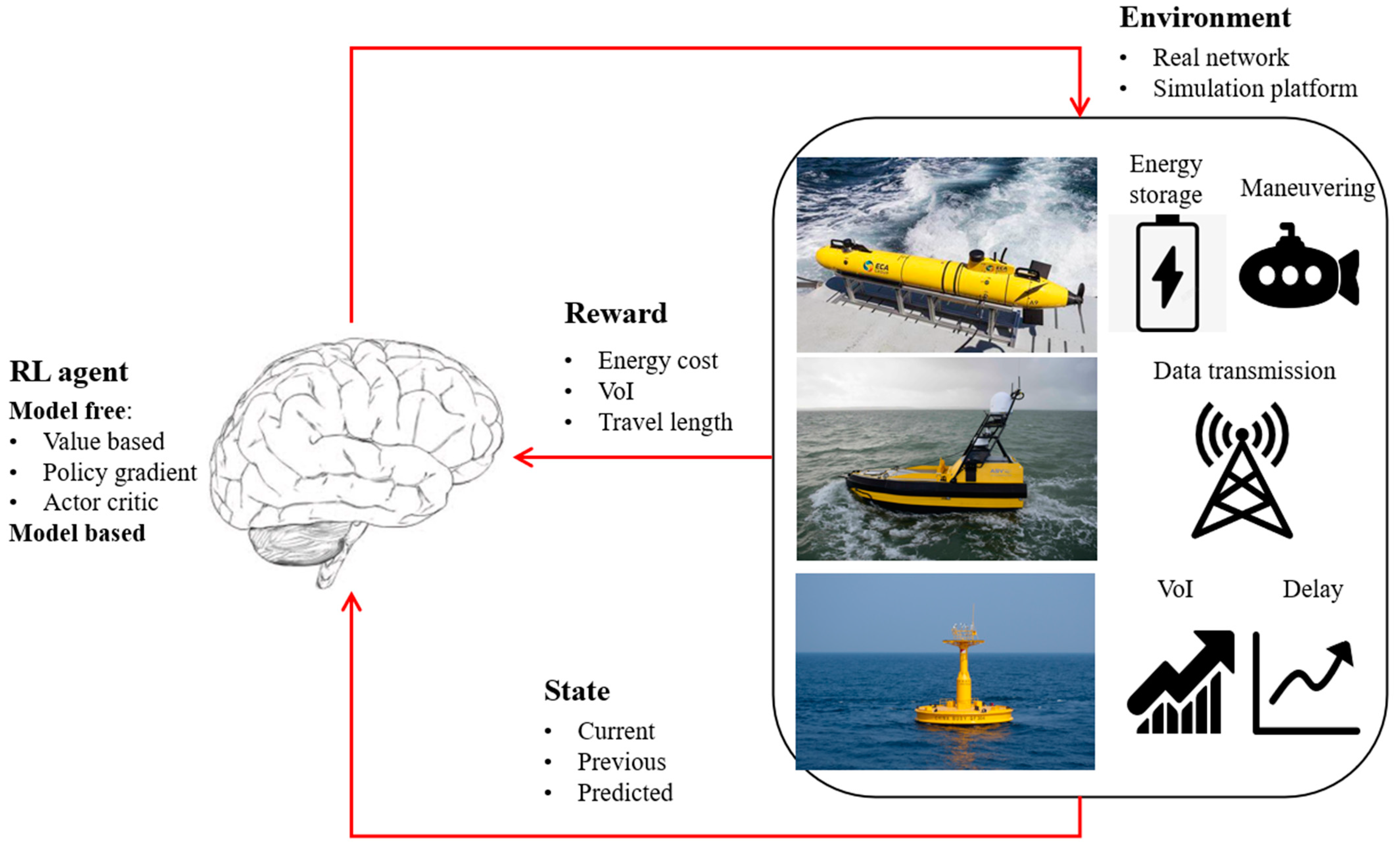
3.2. AI-Based Methods
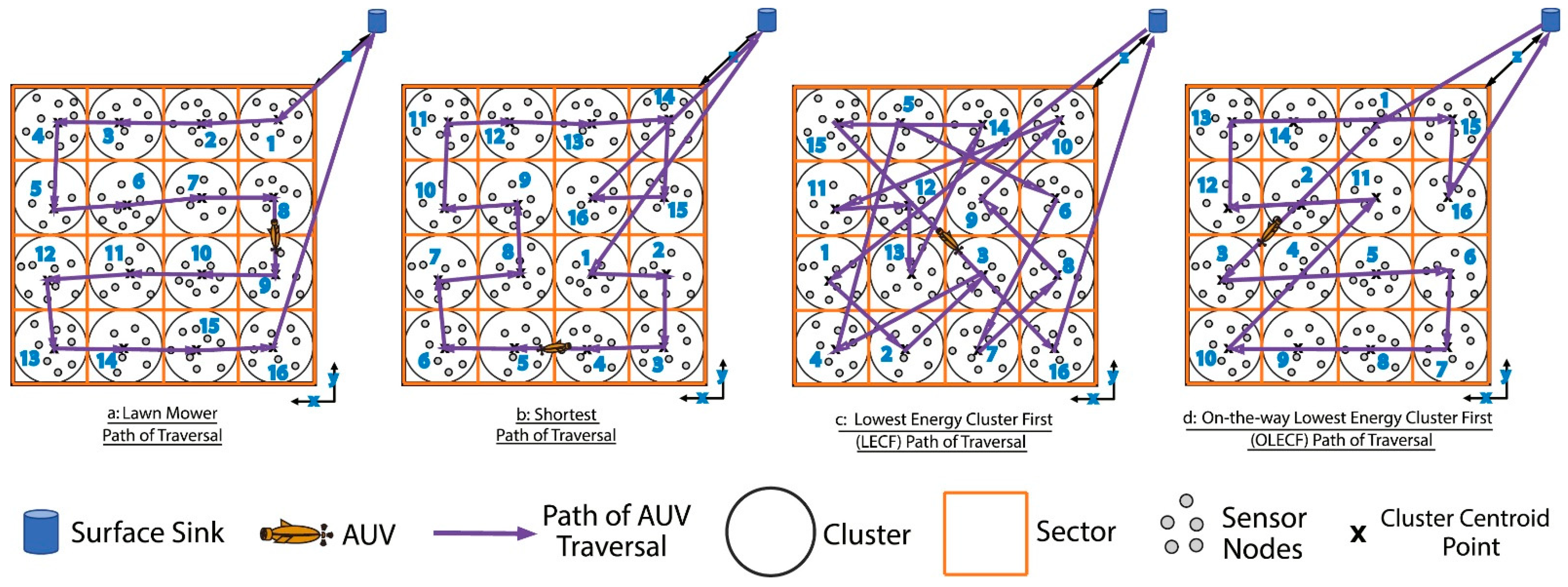
3.3. Coverage Planning Techniques
3.4. Heuristic and Direct Search
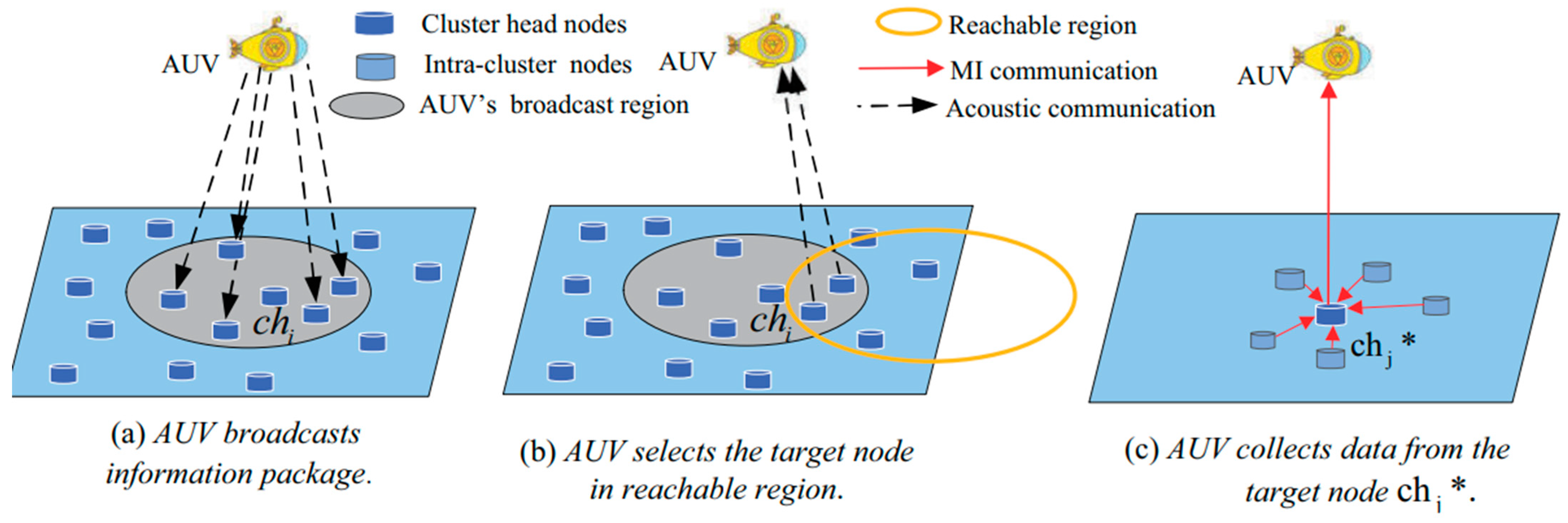
3.5. Online Path-Planning Techniques
3.6. Others
4. Discussion
- Vessel dynamics and unknown ocean currents: When planning paths for AMVs in maritime data collection, it is essential to consider the vessel dynamics and the influence of unpredictable ocean currents. On the one hand, our previous works [137] have shown that the trajectory design must ensure that the AMVs move in a feasible manner, as infeasible paths would require inaccessible forces/torques, such as propulsive force and steering torque, which are limited. For instance, a sharp turning is infeasible for a USV, as steering maneuvers can lead to significant sideslip, deviating from the original path. Furthermore, navigating the vehicle along a predetermined path encounters complexity arising from the ever-changing nature of ocean currents and their inherent unpredictability. The vehicle’s trajectory is susceptible to divergence caused by motion-induced disturbances, while underwater environments further compound matters with sensor-induced inaccuracies in state estimation. Successfully addressing this challenge would result in more precise and effective data collection even in the face of varying environmental conditions.
- Path planning under more complex communication channels: Prior research has engaged in simplifications when constructing models for underwater communication, and in certain cases, some studies have even omitted these communication models [90]. However, communication within the actual marine environment presents greater intricacies [138,139,140], including factors such as Doppler frequency, multipath effects, latency, and data transmission rates, all of which are influenced by the environment. Developing sophisticated path-planning algorithms that optimize communication paths while factoring in variables like signal strength and interference patterns is crucial. Potential future avenues involve enhancing the control model, particularly in scenarios considering the instability of underwater communication and significant delays inherent in acoustic-based communication.
- Considering onboard sensor failure and uncertainty in state estimation: Previous research commonly operated under the presumption of having complete knowledge of the environment or flawless sensing capabilities. However, these assumptions are often impractical in the vast majority of scenarios, particularly in underwater settings [129,141]. Even when advanced techniques like terrain-relative navigation (TRN) or simultaneous localization and mapping (SLAM) are employed to enhance localization, achieving perfect knowledge or sensing remains a challenging proposition. However, due to the interference posed by unknown ocean currents, the inaccuracy in onboard sensor data and state observations can lead to errors in path planning. Additionally, satellite-based position accuracy might not suffice, particularly in unforeseen circumstances demanding high precision. Some propose the adoption of re-planning methods, e.g., [142], while others suggest the integration of UAVs for aiding in localization, e.g., [6,143]. Addressing these challenges holds significant implications for real-world maritime data collection missions.
- Navigating AMVs with uncertain sensor node positions: Previous studies have assumed accurate knowledge of sensor node locations. However, in dynamic underwater environments, anchored nodes can shift from their initial positions due to water currents [144,145]. This movement within a defined range can impede data collection when an AMV follows a predetermined strategy to reach a specific location. Therefore, the AMV may face stochastic position data from the sensor nodes, which causes a delay in reaching the target. Consequently, designing the AMV’s path to accommodate sensor node position uncertainty emerges as a pivotal challenge.
- Path planning for long-duration data harvesting with energy supply: Due to limited energy resources, AMVs are faced with limitations when undertaking tasks over extended distances. Despite the existence of energy-efficient, path-planning methods proposed by many researchers, the energy capacity of AMVs remains insufficient for tasks that cover vast regions. Consequently, introducing energy supply stations during AMV missions has emerged as a viable solution to this challenge. Some scholars have initiated preliminary exploration in this realm. The work in [146] has developed a dynamic routing strategy employing USVs as energy supply stations for UAVs. Similarly, authors of [147] employ USVs to provide energy to AUVs for search tasks. However, the aforementioned work oversimplifies the problem. In reality, the recharging mechanisms for UAVs and AUVs are intricate, involving factors such as the docking of AUVs [148] during motion and the landing of UAVs, see Figure 14. In summary, considering the issue of energy supply station placement in path planning is crucial for enhancing AMV operational efficiency. Nevertheless, the current state of research in this area remains nascent.
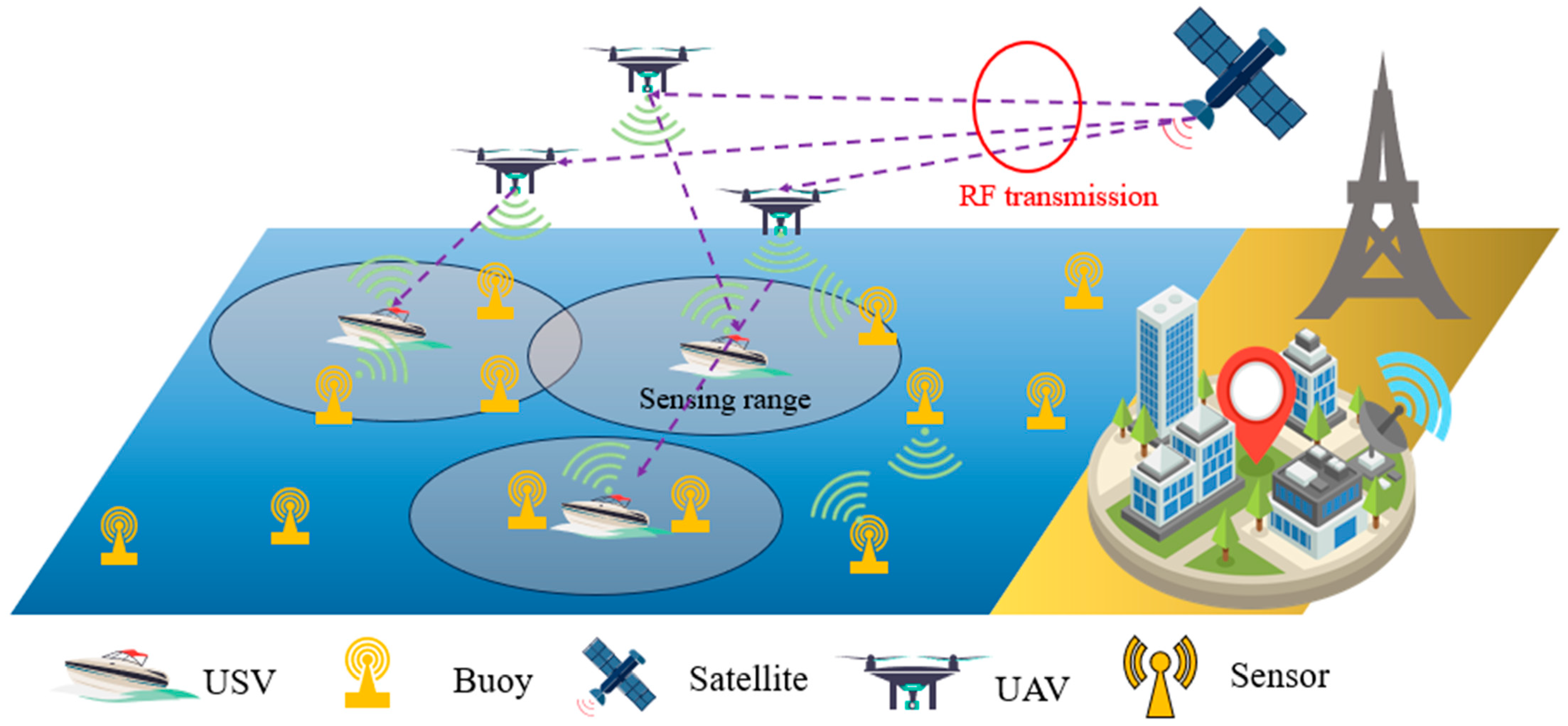
- Path planning for heterogenous systems: Leveraging AUV-USV-UAV heterogeneous unmanned systems can significantly enhance data collection efficiency. Specifically, the incorporation of UAVs offers advantages, such as cost-effectiveness, high flexibility, wide coverage, and line-of-sight (LoS) communication links. AUVs excel in navigating intricate underwater terrains, performing bathymetry mapping, conducting environmental monitoring, and executing sonar-based data collection. However, both UAVs and AUVs are constrained by limited battery capacities. USVs are adept at surface operations and serve as mobile workstations, supplying power and communication networks and serving as landing/docking platforms for UAVs and AUVs. This collaborative multi-robot system holds immense potential for mitigating risks and enhancing efficiency in demanding and perilous maritime tasks. Presently, some scholars have embarked on explorations in heterogeneous unmanned systems, yet their focus has been on foundational theoretical research, including collaborative control [149,150], landing control [151,152,153], and task allocation [154,155]. However, research into the application of heterogeneous unmanned systems in marine engineering remains largely unexplored.
- Field experiments: In Table 2, it is evident that, in preceding research articles, nearly all investigations relied upon numerical simulation methodologies for validation. It is imperative to acknowledge the substantial distinction between experimental and numerical simulation approaches, recognizing that the substantiation of method feasibility and practical applicability necessitates empirical scrutiny. Nonetheless, the execution of authentic maritime or subaquatic experiments is encumbered by formidable challenges. On the one hand, the procurement of mechanical apparatus and sensors is typically accompanied by a high financial outlay. Moreover, maritime experiments entail a significant investment of both manpower and time, with a customary sea expedition enduring from one week to a month, thereby incurring considerable temporal expenses for a singular experimental iteration. On the other hand, maritime experiments are susceptible to the influences of intricate sea conditions, thereby exerting pronounced impacts on the trajectories of AUVs or USVs, consequently yielding diminished data precision and suboptimal experimental outcomes. Consequently, the formulation of efficacious maritime experimental frameworks for the validation of path-planning algorithms stands out as a formidable challenge for the research community.
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhang, Z.; Xiao, Y.; Ma, Z.; Xiao, M.; Ding, Z.; Lei, X.; Karagiannidis, G.K.; Fan, P. 6G Wireless Networks: Vision, Requirements, Architecture, and Key Technologies. IEEE Veh. Technol. Mag. 2019, 14, 28–41. [Google Scholar] [CrossRef]
- David, K.; Berndt, H. 6G Vision and Requirements: Is There Any Need for Beyond 5G? IEEE Veh. Technol. Mag. 2018, 13, 72–80. [Google Scholar] [CrossRef]
- Saad, W.; Bennis, M.; Chen, M. A Vision of 6G Wireless Systems: Applications, Trends, Technologies, and Open Research Problems. IEEE Netw. 2020, 34, 134–142. [Google Scholar] [CrossRef]
- Dai, M.; Li, Y.; Li, P.; Wu, Y.; Qian, L.; Lin, B.; Su, Z. A Survey on Integrated Sensing, Communication, and Computing Networks for Smart Oceans. J. Sens. Actuator Netw. 2022, 11, 70. [Google Scholar] [CrossRef]
- Qiu, T.; Zhao, Z.; Zhang, T.; Chen, C.; Chen, C.L.P. Underwater Internet of Things in Smart Ocean: System Architecture and Open Issues. IEEE Trans. Ind. Inform. 2020, 16, 4297–4307. [Google Scholar] [CrossRef]
- Akhtar, M.W.; Saeed, N. UAVs-Enabled Maritime Communications: UAVs-Enabled Maritime Communications: Opportunities and Challenges. IEEE Syst. Man Cybern. Mag. 2023, 9, 2–8. [Google Scholar] [CrossRef]
- Wang, J.-B.; Zeng, C.; Ding, C.; Zhang, H.; Lin, M.; Wang, J. Unmanned Surface Vessel Assisted Maritime Wireless Communication Toward 6G: Opportunities and Challenges. IEEE Wirel. Commun. 2022, 29, 72–79. [Google Scholar] [CrossRef]
- Xue, K.; Rodríguez-Piñeiro, J.; Yu, Y.; Hong, J.; Yin, X.; Shunqin, X. Performance and Reliability of 5G Communications for USV-UAV Critical Applications. In Proceedings of the 2023 17th European Conference on Antennas and Propagation (EuCAP), Florence, Italy, 26–31 March 2023; pp. 1–5. [Google Scholar]
- Zhao, L.; Wang, F.; Bai, Y. Route Planning for Autonomous Vessels Based on Improved Artificial Fish Swarm Algorithm. Ships Offshore Struct. 2023, 18, 897–906. [Google Scholar] [CrossRef]
- Yu, K.; Liang, X.; Li, M.; Chen, Z.; Yao, Y.; Li, X.; Zhao, Z.; Teng, Y. USV Path Planning Method with Velocity Variation and Global Optimisation Based on AIS Service Platform. Ocean Eng. 2021, 236, 109560. [Google Scholar] [CrossRef]
- Tan, G.; Zhuang, J.; Zou, J.; Wan, L. Adaptive Adjustable Fast Marching Square Method Based Path Planning for the Swarm of Heterogeneous Unmanned Surface Vehicles (USVs). Ocean Eng. 2023, 268, 113432. [Google Scholar] [CrossRef]
- Zhao, L.; Bai, Y. Data Harvesting in Uncharted Waters: Interactive Learning Empowered Path Planning for USV-Assisted Maritime Data Collection under Fully Unknown Environments. Ocean Eng. 2023, 287, 115781. [Google Scholar] [CrossRef]
- Zhou, C.; Gu, S.; Wen, Y.; Du, Z.; Xiao, C.; Huang, L.; Zhu, M. The Review Unmanned Surface Vehicle Path Planning: Based on Multi-Modality Constraint. Ocean Eng. 2020, 200, 107043. [Google Scholar] [CrossRef]
- Xing, B.; Yu, M.; Liu, Z.; Tan, Y.; Sun, Y.; Li, B. A Review of Path Planning for Unmanned Surface Vehicles. J. Mar. Sci. Eng. 2023, 11, 1556. [Google Scholar] [CrossRef]
- Cheng, C.; Sha, Q.; He, B.; Li, G. Path Planning and Obstacle Avoidance for AUV: A Review. Ocean Eng. 2021, 235, 109355. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, C.; Jiang, L.; An, L.; Yang, R. Collision-Avoidance Navigation Systems for Maritime Autonomous Surface Ships: A State of the Art Survey. Ocean Eng. 2021, 235, 109380. [Google Scholar] [CrossRef]
- Hu, L.; Hu, H.; Naeem, W.; Wang, Z. A Review on COLREGs-Compliant Navigation of Autonomous Surface Vehicles: From Traditional to Learning-Based Approaches. J. Autom. Intell. 2022, 1, 100003. [Google Scholar] [CrossRef]
- Hadi, B.; Khosravi, A.; Sarhadi, P. A Review of the Path Planning and Formation Control for Multiple Autonomous Underwater Vehicles. J. Intell. Robot. Syst. 2021, 101, 67. [Google Scholar] [CrossRef]
- Wang, L.; Zhu, D.; Pang, W.; Zhang, Y. A Survey of Underwater Search for Multi-Target Using Multi-AUV: Task Allocation, Path Planning, and Formation Control. Ocean Eng. 2023, 278, 114393. [Google Scholar] [CrossRef]
- Lynch, K.M.; Park, F.C. Modern Robotics; Cambridge University Press: Cambridge, UK, 2017. [Google Scholar]
- Sun, X.; Zhang, L.; Song, D.; Wu, Q.J. A Novel Path Planning Method for Multiple USVs to Collect Seabed-Based Data. Ocean Eng. 2023, 269, 113510. [Google Scholar] [CrossRef]
- Yan, Z.; Li, Y. Data Collection Optimization of Ocean Observation Network Based on AUV Path Planning and Communication. Ocean Eng. 2023, 282, 114912. [Google Scholar] [CrossRef]
- Xia, N.; Luo, L.; Wang, Y.; Zhang, K.; Yang, J.; Wu, Q.; Yuan, C. Improved AP-Clustering-Based AUV-Aided Data Collection Method for UWSNs. Electronics 2023, 12, 3116. [Google Scholar] [CrossRef]
- Khan, M.T.R.; Ahmed, S.H.; Jembre, Y.Z.; Kim, D. An Energy-Efficient Data Collection Protocol with AUV Path Planning in the Internet of Underwater Things. J. Netw. Comput. Appl. 2019, 135, 20–31. [Google Scholar] [CrossRef]
- Han, G.; Shen, S.; Wang, H.; Jiang, J.; Guizani, M. Prediction-Based Delay Optimization Data Collection Algorithm for Underwater Acoustic Sensor Networks. IEEE Trans. Veh. Technol. 2019, 68, 6926–6936. [Google Scholar] [CrossRef]
- Guang, X.; Liu, C.; Qu, W.; Qiu, T. A Joint Optimized Data Collection Algorithm Based on Dynamic Cluster-Head Selection and Value of Information in UWSNs. Veh. Commun. 2022, 38, 100530. [Google Scholar] [CrossRef]
- Sehgal, A.; David, C.; Schönwälder, J. Energy Consumption Analysis of Underwater Acoustic Sensor Networks. In Proceedings of the OCEANS’11 MTS/IEEE KONA, Waikoloa, HI, USA, 19–22 September 2011; IEEE: New York, NY, USA, 2011; pp. 1–6. [Google Scholar]
- Javaid, N.; Shah, M.; Ahmad, A.; Imran, M.; Khan, M.I.; Vasilakos, A.V. An Enhanced Energy Balanced Data Transmission Protocol for Underwater Acoustic Sensor Networks. Sensors 2016, 16, 487. [Google Scholar] [CrossRef] [PubMed]
- Stojanovic, M. On the Relationship between Capacity and Distance in an Underwater Acoustic Communication Channel. ACM SIGMOBILE Mob. Comput. Commun. Rev. 2007, 11, 34–43. [Google Scholar] [CrossRef]
- Huang, M.; Zhang, K.; Zeng, Z.; Wang, T.; Liu, Y. An AUV-Assisted Data Gathering Scheme Based on Clustering and Matrix Completion for Smart Ocean. IEEE Internet Things J. 2020, 7, 9904–9918. [Google Scholar] [CrossRef]
- Hafeez, K.A.; Zhao, L.; Mark, J.W.; Shen, X.; Niu, Z. Distributed Multichannel and Mobility-Aware Cluster-Based MAC Protocol for Vehicular Ad Hoc Networks. IEEE Trans. Veh. Technol. 2013, 62, 3886–3902. [Google Scholar] [CrossRef]
- Zhuo, X.; Liu, M.; Wei, Y.; Yu, G.; Qu, F.; Sun, R. AUV-Aided Energy-Efficient Data Collection in Underwater Acoustic Sensor Networks. IEEE Internet Things J. 2020, 7, 10010–10022. [Google Scholar] [CrossRef]
- Chen, S.; Chen, Y.; Zhu, J.; Xu, X. Path-Planning Analysis of AUV-Aided Mobile Data Collection in UWA Cooperative Sensor Networks. In Proceedings of the 2020 IEEE International Conference on Signal Processing, Communications and Computing (ICSPCC), Macau, China, 21–24 August 2020; pp. 1–5. [Google Scholar]
- Huang, Z.; Wang, S. Multilink and AUV-Assisted Energy-Efficient Underwater Emergency Communications. IEEE Internet Things J. 2023, 10, 8068–8082. [Google Scholar] [CrossRef]
- Nam, H. Data-Gathering Protocol-Based AUV Path-Planning for Long-Duration Cooperation in Underwater Acoustic Sensor Networks. IEEE Sens. J. 2018, 18, 8902–8912. [Google Scholar] [CrossRef]
- Han, G.; Gong, A.; Wang, H.; Martínez-García, M.; Peng, Y. Multi-AUV Collaborative Data Collection Algorithm Based on Q-Learning in Underwater Acoustic Sensor Networks. IEEE Trans. Veh. Technol. 2021, 70, 9294–9305. [Google Scholar] [CrossRef]
- Fang, Z.; Wang, J.; Du, J.; Hou, X.; Ren, Y.; Han, Z. Stochastic Optimization-Aided Energy-Efficient Information Collection in Internet of Underwater Things Networks. IEEE Internet Things J. 2022, 9, 1775–1789. [Google Scholar] [CrossRef]
- Basagni, S.; Bölöni, L.; Gjanci, P.; Petrioli, C.; Phillips, C.A.; Turgut, D. Maximizing the Value of Sensed Information in Underwater Wireless Sensor Networks via an Autonomous Underwater Vehicle. In Proceedings of the IEEE INFOCOM 2014-IEEE Conference on Computer Communications, Toronto, ON, Canada, 27 April–2 May 2014; IEEE: New York, NY, USA, 2014; pp. 988–996. [Google Scholar]
- Gjanci, P.; Petrioli, C.; Basagni, S.; Phillips, C.A.; Bölöni, L.; Turgut, D. Path Finding for Maximum Value of Information in Multi-Modal Underwater Wireless Sensor Networks. IEEE Trans. Mob. Comput. 2018, 17, 404–418. [Google Scholar] [CrossRef]
- Alsalih, W.; Hassanein, H.; Akl, S. Placement of Multiple Mobile Data Collectors in Underwater Acoustic Sensor Networks. Wirel. Commun. Mob. Comput. 2008, 8, 1011–1022. [Google Scholar] [CrossRef]
- Yan, J.; Yang, X.; Luo, X.; Chen, C. Energy-Efficient Data Collection over AUV-Assisted Underwater Acoustic Sensor Network. IEEE Syst. J. 2018, 12, 3519–3530. [Google Scholar] [CrossRef]
- Faigl, J.; Hollinger, G.A. Autonomous Data Collection Using a Self-Organizing Map. IEEE Trans. Neural Netw. Learn. Syst. 2018, 29, 1703–1715. [Google Scholar] [CrossRef]
- Han, S.; Zhang, T.; Li, X.; Yu, J.; Zhang, T.; Liu, Z. The Unified Task Assignment for Underwater Data Collection with Multi-AUV System: A Reinforced Self-Organizing Mapping Approach. In IEEE Transactions on Neural Networks and Learning Systems; IEEE: New York, NY, USA, 2022; pp. 1–14. [Google Scholar] [CrossRef]
- Liu, Y.; Song, R.; Bucknall, R.; Zhang, X. Intelligent Multi-Task Allocation and Planning for Multiple Unmanned Surface Vehicles (USVs) Using Self-Organising Maps and Fast Marching Method. Inf. Sci. 2019, 496, 180–197. [Google Scholar] [CrossRef]
- Ma, S.; Guo, W.; Song, R.; Liu, Y. Unsupervised Learning Based Coordinated Multi-Task Allocation for Unmanned Surface Vehicles. Neurocomputing 2021, 420, 227–245. [Google Scholar] [CrossRef]
- Smith, R.N.; Chao, Y.; Li, P.P.; Caron, D.A.; Jones, B.H.; Sukhatme, G.S. Planning and Implementing Trajectories for Autonomous Underwater Vehicles to Track Evolving Ocean Processes Based on Predictions from a Regional Ocean Model. Int. J. Robot. Res. 2010, 29, 1475–1497. [Google Scholar] [CrossRef]
- Smith, R.N.; Schwager, M.; Smith, S.L.; Jones, B.H.; Rus, D.; Sukhatme, G.S. Persistent Ocean Monitoring with Underwater Gliders: Adapting Sampling Resolution. J. Field Robot. 2011, 28, 714–741. [Google Scholar] [CrossRef]
- Hollinger, G.A.; Choudhary, S.; Qarabaqi, P.; Murphy, C.; Mitra, U.; Sukhatme, G.S.; Stojanovic, M.; Singh, H.; Hover, F. Underwater Data Collection Using Robotic Sensor Networks. IEEE J. Sel. Areas Commun. 2012, 30, 899–911. [Google Scholar] [CrossRef]
- Pereira, A.A.; Binney, J.; Hollinger, G.A.; Sukhatme, G.S. Risk-Aware Path Planning for Autonomous Underwater Vehicles Using Predictive Ocean Models. J. Field Robot. 2013, 30, 741–762. [Google Scholar] [CrossRef]
- Smith, R.N.; Pereira, A.; Chao, Y.; Li, P.P.; Caron, D.A.; Jones, B.H.; Sukhatme, G.S. Autonomous Underwater Vehicle Trajectory Design Coupled with Predictive Ocean Models: A Case Study. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 4770–4777. [Google Scholar]
- Lin, C.; Han, G.; Du, J.; Bi, Y.; Shu, L.; Fan, K. A Path Planning Scheme for AUV Flock-Based Internet-of-Underwater-Things Systems to Enable Transparent and Smart Ocean. IEEE Internet Things J. 2020, 7, 9760–9772. [Google Scholar] [CrossRef]
- Zhang, W.; Wang, N.; Wu, W. A Hybrid Path Planning Algorithm Considering AUV Dynamic Constraints Based on Improved A* Algorithm and APF Algorithm. Ocean Eng. 2023, 285, 115333. [Google Scholar] [CrossRef]
- Lin, X.; Han, Y.; Guo, H.; Luo, Z.; Guo, Z. Lift Path Planning for Tower Cranes Based on Environmental Point Clouds. Autom. Constr. 2023, 155, 105046. [Google Scholar] [CrossRef]
- Jin, J.; Zhang, Y.; Zhou, Z.; Jin, M.; Yang, X.; Hu, F. Conflict-Based Search with D* Lite Algorithm for Robot Path Planning in Unknown Dynamic Environments. Comput. Electr. Eng. 2023, 105, 108473. [Google Scholar] [CrossRef]
- Yu, J.; Yang, M.; Zhao, Z.; Wang, X.; Bai, Y.; Wu, J.; Xu, J. Path Planning of Unmanned Surface Vessel in an Unknown Environment Based on Improved D* Lite Algorithm. Ocean Eng. 2022, 266, 112873. [Google Scholar] [CrossRef]
- Han, S.; Wang, L.; Wang, Y.; He, H. A Dynamically Hybrid Path Planning for Unmanned Surface Vehicles Based on Non-Uniform Theta* and Improved Dynamic Windows Approach. Ocean. Eng. 2022, 257, 111655. [Google Scholar] [CrossRef]
- Yuan, M.; Chen, M.; Zhou, T. Improved Lazy Theta∗ Algorithm Based on Octree Map for Path Planning of UAV. Def. Technol. 2023, 23, 8–18. [Google Scholar] [CrossRef]
- Han, J.; Koenig, S. A Multiple Surrounding Point Set Approach Using Theta* Algorithm on Eight-Neighbor Grid Graphs. Inf. Sci. 2022, 582, 618–632. [Google Scholar] [CrossRef]
- Gu, Q.; Zhen, R.; Liu, J.; Li, C. An Improved RRT Algorithm Based on Prior AIS Information and DP Compression for Ship Path Planning. Ocean Eng. 2023, 279, 114595. [Google Scholar] [CrossRef]
- Liang, Y.; Zhao, H. CCPF-RRT*: An Improved Path Planning Algorithm with Consideration of Congestion. Expert Syst. Appl. 2023, 228, 120403. [Google Scholar] [CrossRef]
- Fan, J.; Chen, X.; Wang, Y.; Chen, X. UAV Trajectory Planning in Cluttered Environments Based on PF-RRT* Algorithm with Goal-Biased Strategy. Eng. Appl. Artif. Intell. 2022, 114, 105182. [Google Scholar] [CrossRef]
- Xiao, Q.; Cai, J. The Path-Planning in Radioactive Environment Based on HIOSD-PRM Method. Ann. Nucl. Energy 2022, 171, 109018. [Google Scholar] [CrossRef]
- Yang, R.; Li, J.; Jia, Z.; Wang, S.; Yao, H.; Dong, E. EPL-PRM: Equipotential Line Sampling Strategy for Probabilistic Roadmap Planners in Narrow Passages. Biomim. Intell. Robot. 2023, 3, 100112. [Google Scholar] [CrossRef]
- Zhao, L.; Bai, Y.; Paik, J.K. Global-Local Hierarchical Path Planning Scheme for Unmanned Surface Vehicles under Dynamically Unforeseen Environments. Ocean Eng. 2023, 280, 114750. [Google Scholar] [CrossRef]
- Zhao, L.; Bai, Y.; Paik, J.K. Global Path Planning and Waypoint Following for Heterogeneous Unmanned Surface Vehicles Assisting Inland Water Monitoring. J. Ocean Eng. Sci. 2023. [Google Scholar] [CrossRef]
- Ntakolia, C.; Lyridis, D.V. A Comparative Study on Ant Colony Optimization Algorithm Approaches for Solving Multi-Objective Path Planning Problems in Case of Unmanned Surface Vehicles. Ocean Eng. 2022, 255, 111418. [Google Scholar] [CrossRef]
- Shen, Z.; Ding, W.; Liu, Y.; Yu, H. Path Planning Optimization for Unmanned Sailboat in Complex Marine Environment. Ocean Eng. 2023, 269, 113475. [Google Scholar] [CrossRef]
- Xue, H. A Quasi-Reflection Based SC-PSO for Ship Path Planning with Grounding Avoidance. Ocean Eng. 2022, 247, 110772. [Google Scholar] [CrossRef]
- Jeong, H.-J.; Koo, W. Analysis of Various Algorithms for Optimizing the Wave Energy Converters Associated with a Sloped Wall-Type Breakwater. Ocean Eng. 2023, 276, 114199. [Google Scholar] [CrossRef]
- Shi, K.; Wu, Z.; Jiang, B.; Karimi, H.R. Dynamic Path Planning of Mobile Robot Based on Improved Simulated Annealing Algorithm. J. Frankl. Inst. 2023, 360, 4378–4398. [Google Scholar] [CrossRef]
- Ait-Saadi, A.; Meraihi, Y.; Soukane, A.; Ramdane-Cherif, A.; Gabis, A.B. A Novel Hybrid Chaotic Aquila Optimization Algorithm with Simulated Annealing for Unmanned Aerial Vehicles Path Planning. Comput. Electr. Eng. 2022, 104, 108461. [Google Scholar] [CrossRef]
- Bu, F.; Luo, H.; Ma, S.; Li, X.; Ruby, R.; Han, G. AUV-Aided Optical—Acoustic Hybrid Data Collection Based on Deep Reinforcement Learning. Sensors 2023, 23, 578. [Google Scholar] [CrossRef] [PubMed]
- Song, S.; Liu, J.; Guo, J.; Lin, B.; Ye, Q.; Cui, J. Efficient Data Collection Scheme for Multi-Modal Underwater Sensor Networks Based on Deep Reinforcement Learning. IEEE Trans. Veh. Technol. 2023, 72, 6558–6570. [Google Scholar] [CrossRef]
- Su, N.; Wang, J.-B.; Zeng, C.; Zhang, H.; Lin, M.; Li, G.Y. Unmanned-Surface-Vehicle-Aided Maritime Data Collection Using Deep Reinforcement Learning. IEEE Internet Things J. 2022, 9, 19773–19786. [Google Scholar] [CrossRef]
- Su, N.; Yao, J.; Chen, D.; Wang, J.-B.; Zeng, C.; Zhang, H. USV Aided Reliable and Efficient Data Collection in Maritime Monitoring System. In Proceedings of the 2022 IEEE 10th Joint International Information Technology and Artificial Intelligence Conference (ITAIC), Chongqing, China, 17–19 June 2022; Volume 10, pp. 1010–1015. [Google Scholar]
- Zhao, H.; Yan, J.; Wu, T.; Li, A.; Luo, X. Energy-Efficient Underwater Data Collection: A Q-Learning Based Approach. J. Mar. Sci. Appl. 2022, 21, 204–218. [Google Scholar] [CrossRef]
- Gore, R.; Pattanaik, K.K.; Bharti, S. Efficient Re-Planned Path for Autonomous Underwater Vehicle in Random Obstacle Scenario. In Proceedings of the 2019 IEEE 5th International Conference for Convergence in Technology (I2CT), Bombay, India, 29–31 March 2019; pp. 1–5. [Google Scholar]
- Khan, M.T.R.; Jembre, Y.Z.; Ahmed, S.H.; Seo, J.; Kim, D. Data Freshness Based AUV Path Planning for UWSN in the Internet of Underwater Things. In Proceedings of the 2019 IEEE Global Communications Conference (GLOBECOM), Waikoloa, HI, USA, 9–13 December 2019; pp. 1–6. [Google Scholar]
- Nam, H. AUV Based Data-Gathering Protocol for the Lifetime Extension of Underwater Acoustic Sensor Networks. In IEICE Transactions on Fundamentals of Electronics, Communications and Computer Sciences; J-Stage: Japan, 2017; Volume 100, pp. 1596–1600. [Google Scholar]
- Yu, T.; Liu, C.; Qu, W.; Zhao, Z. Od-Pps: An on-Demand Path Planning Scheme for Maximizing Data Completeness in Multi-Modal Uwsns. In Proceedings of the Wireless Algorithms, Systems, and Applications: 16th International Conference, WASA 2021, Nanjing, China, 25–27 June 2021; Proceedings, Part I 16. Springer: Berlin/Heidelberg, Germany, 2021; pp. 16–28. [Google Scholar]
- Zhuo, W.; Longjie, J.; Hongmei, G.; Xiaoning, F. A Path Planning Strategy for Data Acquisition Task Using Multiple Autonomous Underwater Vehicles. In Proceedings of the OCEANS 2016—Shanghai, Shanghai, China, 10–13 April 2016; pp. 1–5. [Google Scholar]
- Hollinger, G.A.; Choudhary, S.; Qarabaqi, P.; Murphy, C.; Mitra, U.; Sukhatme, G.S.; Stojanovic, M.; Singh, H.; Hover, F. Communication Protocols for Underwater Data Collection Using a Robotic Sensor Network. In Proceedings of the 2011 IEEE GLOBECOM Workshops (GC Wkshps), Houston, TX, USA, 5–9 December 2011; pp. 1308–1313. [Google Scholar]
- Li, Y.; Sun, Y.; Ren, Q.; Li, S. AUV-Aided Data Collection Considering Adaptive Ocean Currents for Underwater Wireless Sensor Networks. China Commun. 2023, 20, 356–367. [Google Scholar] [CrossRef]
- Gao, C.; Hu, W.; Chen, K. Research on Multi-AUVs Data Acquisition System of Underwater Acoustic Communication Network. Sensors 2022, 22, 5090. [Google Scholar] [CrossRef]
- Smith, R.N.; Huynh, V.T. Controlling Buoyancy-Driven Profiling Floats for Applications in Ocean Observation. IEEE J. Ocean. Eng. 2013, 39, 571–586. [Google Scholar] [CrossRef]
- Smith, R.N.; Huynh, V.T. Controlling Minimally-Actuated Vehicles for Applications in Ocean Observation. IFAC Proc. Vol. 2012, 45, 31–36. [Google Scholar] [CrossRef]
- Zhang, J.; Wang, Z.; Han, G.; Qian, Y. Heuristic Surface Path Planning Method for AMV-Assisted Internet of Underwater Things. Sustainability 2023, 15, 3137. [Google Scholar] [CrossRef]
- Heesemann, M.; Insua, T.L.; Scherwath, M.; Juniper, K.S.; Moran, K. Ocean Networks Canada: From Geohazards Research Laboratories to Smart Ocean Systems. Oceanography 2014, 27, 151–153. [Google Scholar] [CrossRef]
- Chawra, V.K.; Gupta, G.P. Optimized Coverage-Aware Trajectory Planning for AUVs for Efficient Data Collection in Underwater Acoustic Sensor Networks. Evol. Intell. 2023, 16, 401–416. [Google Scholar] [CrossRef]
- Sun, X.; Zhang, L.; Song, D.; Wu, Q.M.J. Path Planning for Multiple USV Collecting Seabed-Based Data Based on UWA Communication. In Proceedings of the OCEANS 2022, Hampton Roads, Hampton Roads, VA, USA, 17–20 October 2022; pp. 1–4. [Google Scholar]
- Wang, Z.; Liu, C.; Zhao, Z.; Yu, T.; Qu, W. FS-PPS: A Fermat’s Spiral Based Path Planning Scheme for Data Collection in UWSNs. In Proceedings of the 2022 IEEE 25th International Conference on Computer Supported Cooperative Work in Design (CSCWD), Hangzhou, China, 4–6 May 2022; IEEE: New York, NY, USA, 2022; pp. 1311–1316. [Google Scholar]
- Al-Bzoor, M.; Al-assem, E.; Alawneh, L.; Jararweh, Y. Autonomous Underwater Vehicles Support for Enhanced Performance in the Internet of Underwater Things. Trans. Emerg. Telecommun. Technol. 2021, 32, e4225. [Google Scholar] [CrossRef]
- Qin, C.; Du, J.; Wang, J.; Ren, Y. A Hierarchical Information Acquisition System for AUV Assisted Internet of Underwater Things. IEEE Access 2020, 8, 176089–176100. [Google Scholar] [CrossRef]
- Cai, W.; Zhang, M. Smooth 3D Dubins Curves Based Mobile Data Gathering in Sparse Underwater Sensor Networks. Sensors 2018, 18, 2105. [Google Scholar] [CrossRef]
- Cai, W.; Zhang, M. 3D Dubins Curves Based Path Programming for Mobile Sink in Underwater Sensor Networks. Electron. Lett. 2017, 53, 48–50. [Google Scholar] [CrossRef]
- Khan, F.A.; Khan, S.A.; Turgut, D.; Boloni, L. Optimizing Resurfacing Schedules to Maximize Value of Information in UWSNs. In Proceedings of the 2016 IEEE Global Communications Conference (GLOBECOM), Washington, DC, USA, 4–8 December 2016; IEEE: New York, NY, USA, 2016; pp. 1–5. [Google Scholar]
- Hong-jian, W.; Jie, Z.; Xin-qian, B.; Xiao-cheng, S. An Improved Path Planner Based on Adaptive Genetic Algorithm for Autonomous Underwater Vehicle. In Proceedings of the IEEE International Conference Mechatronics and Automation, Niagara Falls, ON, Canada, 29 July–1 August 2005; Volume 2, pp. 857–861. [Google Scholar]
- Cheng, M.; Guan, Q.; Ji, F.; Cheng, J.; Chen, Y. Dynamic-Detection-Based Trajectory Planning for Autonomous Underwater Vehicle to Collect Data From Underwater Sensors. IEEE Internet Things J. 2022, 9, 13168–13178. [Google Scholar] [CrossRef]
- Cheng, M.; Ji, F.; Guan, Q. Dynamic Detecting Based Trajectory Planning for AUV to Collect Data from Underwater Sensors. In Proceedings of the ICC 2021-IEEE International Conference on Communications, Montreal, QC, Canada, 14–23 June 2021; IEEE: New York, NY, USA, 2021; pp. 1–6. [Google Scholar]
- Forero, P.A.; Lapic, S.K.; Wakayama, C.; Zorzi, M. Rollout Algorithms for Data Storage-and Energy-Aware Data Retrieval Using Autonomous Underwater Vehicles. In Proceedings of the 9th International Conference on Underwater Networks & Systems, Rome, Italy, 12–14 November 2014; pp. 1–8. [Google Scholar]
- Khan, W.; Hua, W.; Anwar, M.S.; Alharbi, A.; Imran, M.; Khan, J.A. An Effective Data-Collection Scheme with AUV Path Planning in Underwater Wireless Sensor Networks. Wirel. Commun. Mob. Comput. 2022, 2022, 8154573. [Google Scholar] [CrossRef]
- Lyu, L.; Chu, Z.; Lin, B.; Dai, Y.; Cheng, N. Fast Trajectory Planning for UAV-Enabled Maritime IoT Systems: A Fermat-Point Based Approach. IEEE Wirel. Commun. Lett. 2022, 11, 328–332. [Google Scholar] [CrossRef]
- He, Y.; Han, G.; Tang, Z.; Martínez-García, M.; Peng, Y. State Prediction-Based Data Collection Algorithm in Underwater Acoustic Sensor Networks. IEEE Trans. Wirel. Commun. 2022, 21, 2830–2842. [Google Scholar] [CrossRef]
- Alam, T.; Al Redwan Newaz, A.; Bobadilla, L.; Alsabban, W.H.; Smith, R.N.; Karimoddini, A. Towards Energy-Aware Feedback Planning for Long-Range Autonomous Underwater Vehicles. Front. Robot. AI 2021, 8, 7. [Google Scholar] [CrossRef] [PubMed]
- Cai, W.; Xie, Q.; Zhang, M.; Lv, S.; Yang, J. Stream-Function Based 3D Obstacle Avoidance Mechanism for Mobile AUVs in the Internet of Underwater Things. IEEE Access 2021, 9, 142997–143012. [Google Scholar] [CrossRef]
- Zheng, H.; Wang, N.; Wu, J. Minimizing Deep Sea Data Collection Delay with Autonomous Underwater Vehicles. J. Parallel Distrib. Comput. 2017, 104, 99–113. [Google Scholar] [CrossRef]
- Murthy, K.; Rock, S. Spline-Based Trajectory Planning Techniques for Benthic AUV Operations. In Proceedings of the 2010 IEEE/OES Autonomous Underwater Vehicles, Monterey, CA, USA, 1–3 September 2010; pp. 1–9. [Google Scholar]
- McMahon, J.; Plaku, E. Autonomous Data Collection with Timed Communication Constraints for Unmanned Underwater Vehicles. IEEE Robot. Autom. Lett. 2021, 6, 1832–1839. [Google Scholar] [CrossRef]
- McMahon, J.; Plaku, E. Autonomous Data Collection with Limited Time for Underwater Vehicles. IEEE Robot. Autom. Lett. 2017, 2, 112–119. [Google Scholar] [CrossRef]
- Xu, Y.; Han, Y.; Sun, Z.; Gu, W.; Jin, Y.; Xue, X.; Lan, Y. Path Planning Optimization with Multiple Pesticide and Power Loading Bases Using Several Unmanned Aerial Systems on Segmented Agricultural Fields. IEEE Trans. Syst. Man Cybern. Syst. 2023, 53, 1882–1894. [Google Scholar] [CrossRef]
- Wu, Y.; Wang, Z.; Yao, J.; Guo, H. Joint Decision of Order Allocation and Lending in the Multi-Supplier Scenario Purchase Order Financing. Int. J. Prod. Econ. 2023, 255, 108710. [Google Scholar] [CrossRef]
- Yang, X.; Han, Q. Improved Reinforcement Learning for Collision-Free Local Path Planning of Dynamic Obstacle. Ocean Eng. 2023, 283, 115040. [Google Scholar] [CrossRef]
- Xia, J.; Zhu, X.; Liu, Z.; Luo, Y.; Wu, Z.; Wu, Q. Research on Collision Avoidance Algorithm of Unmanned Surface Vehicle Based on Deep Reinforcement Learning. IEEE Sens. J. 2023, 23, 11262–11273. [Google Scholar] [CrossRef]
- Wang, N.; Zhang, Y.; Ahn, C.K.; Xu, Q. Autonomous Pilot of Unmanned Surface Vehicles: Bridging Path Planning and Tracking. IEEE Trans. Veh. Technol. 2022, 71, 2358–2374. [Google Scholar] [CrossRef]
- Zhu, D.; Cao, X.; Sun, B.; Luo, C. Biologically Inspired Self-Organizing Map Applied to Task Assignment and Path Planning of an AUV System. IEEE Trans. Cogn. Dev. Syst. 2018, 10, 304–313. [Google Scholar] [CrossRef]
- Zhu, D.; Huang, H.; Yang, S.X. Dynamic Task Assignment and Path Planning of Multi-AUV System Based on an Improved Self-Organizing Map and Velocity Synthesis Method in Three-Dimensional Underwater Workspace. IEEE Trans. Cybern. 2013, 43, 504–514. [Google Scholar] [CrossRef] [PubMed]
- Zhu, D.; Zhou, B.; Yang, S.X. A Novel Algorithm of Multi-AUVs Task Assignment and Path Planning Based on Biologically Inspired Neural Network Map. IEEE Trans. Intell. Veh. 2021, 6, 333–342. [Google Scholar] [CrossRef]
- Tan, G.; Zhuang, J.; Zou, J.; Wan, L. Multi-Type Task Allocation for Multiple Heterogeneous Unmanned Surface Vehicles (USVs) Based on the Self-Organizing Map. Appl. Ocean Res. 2022, 126, 103262. [Google Scholar] [CrossRef]
- Yao, P.; Lou, Y.; Zhang, K. Multi-USV Cooperative Path Planning by Window Update Based Self-Organizing Map and Spectral Clustering. Ocean Eng. 2023, 275, 114140. [Google Scholar] [CrossRef]
- Bai, G.; Hu, X.; Shi, Y.; Jiang, W.; Zhang, X.; Chen, Y. Multi-AUV Dynamic Trajectory Optimization and Collaborative Search Combined with Task Urgency and Energy Consumption Scheduling in 3-D Underwater Environment with Random Ocean Currents and Uncertain Obstacles. Ocean Eng. 2023, 275, 113841. [Google Scholar] [CrossRef]
- Chen, Y.-L.; Ma, X.-W.; Bai, G.-Q.; Sha, Y.; Liu, J. Multi-Autonomous Underwater Vehicle Formation Control and Cluster Search Using a Fusion Control Strategy at Complex Underwater Environment. Ocean Eng. 2020, 216, 108048. [Google Scholar] [CrossRef]
- Galceran, E.; Carreras, M. Efficient Seabed Coverage Path Planning for ASVs and AUVs. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura-Algarve, Portugal, 7–12 October 2012; IEEE: New York, NY, USA, 2012; pp. 88–93. [Google Scholar]
- Kapetanović, N.; Mišković, N.; Tahirović, A.; Bibuli, M.; Caccia, M. A Side-Scan Sonar Data-Driven Coverage Planning and Tracking Framework. Annu. Rev. Control 2018, 46, 268–280. [Google Scholar] [CrossRef]
- Galceran, E.; Campos, R.; Palomeras, N.; Ribas, D.; Carreras, M.; Ridao, P. Coverage Path Planning with Real-Time Replanning and Surface Reconstruction for Inspection of Three-Dimensional Underwater Structures Using Autonomous Underwater Vehicles. J. Field Robot. 2015, 32, 952–983. [Google Scholar] [CrossRef]
- Yao, P.; Qiu, L.; Qi, J.; Yang, R. AUV Path Planning for Coverage Search of Static Target in Ocean Environment. Ocean Eng. 2021, 241, 110050. [Google Scholar] [CrossRef]
- Cai, C.; Chen, J.; Yan, Q.; Liu, F. A Multi-Robot Coverage Path Planning Method for Maritime Search and Rescue Using Multiple AUVs. Remote Sens. 2022, 15, 93. [Google Scholar] [CrossRef]
- Cai, C.; Chen, J.; Yan, Q.; Liu, F.; Zhou, R. A Prior Information-Based Coverage Path Planner for Underwater Search and Rescue Using Autonomous Underwater Vehicle (AUV) with Side-Scan Sonar. IET Radar Sonar Navig. 2022, 16, 1225–1239. [Google Scholar] [CrossRef]
- Yordanova, V.; Gips, B.; Furfaro, T.; Dugelay, S. Coverage Path Planning for Mine Countermeasures: Adapting Track Orientation. In Proceedings of the OCEANS 2019-Marseille, Marseille, France, 17–20 June 2019; IEEE: New York, NY, USA, 2019; pp. 1–7. [Google Scholar]
- Paull, L.; Saeedi, S.; Seto, M.; Li, H. Sensor-Driven Online Coverage Planning for Autonomous Underwater Vehicles. IEEE/ASME Trans. Mechatron. 2013, 18, 1827–1838. [Google Scholar] [CrossRef]
- Galceran, E.; Carreras, M. A Survey on Coverage Path Planning for Robotics. Robot. Auton. Syst. 2013, 61, 1258–1276. [Google Scholar] [CrossRef]
- Zhao, L.; Bai, Y.; Paik, J.K. Achieving Optimal-Dynamic Path Planning for Unmanned Surface Vehicles: A Rational Multi-Objective Approach and a Sensory-Vector Re-Planner. Ocean Eng. 2023, 286, 115433. [Google Scholar] [CrossRef]
- Benjamin, M.R. Multi-Objective Autonomous Vehicle Navigation in the Presence of Cooperative and Adversarial Moving Contacts. In Proceedings of the OCEANS’02 MTS/IEEE, Biloxi, MI, USA, 29–31 October 2002; IEEE: New York, NY, USA, 2002; Volume 3, pp. 1878–1885. [Google Scholar]
- Zheng, H.; Wu, J. Data Collection and Event Detection in the Deep Sea with Delay Minimization. In Proceedings of the 2015 12th Annual IEEE International Conference on Sensing, Communication, and Networking (SECON), Seattle, WA, USA, 22–25 June 2015; pp. 354–362. [Google Scholar]
- Wu, J.; Zheng, H. On Efficient Data Collection and Event Detection with Delay Minimization in Deep Sea. In Proceedings of the 9th ACM MobiCom Workshop on Challenged Networks, Maui, HI, USA, 7 September 2014; pp. 77–80. [Google Scholar]
- Hung, N.T.; Crasta, N.; Moreno-Salinas, D.; Pascoal, A.M.; Johansen, T.A. Range-Based Target Localization and Pursuit with Autonomous Vehicles: An Approach Using Posterior CRLB and Model Predictive Control. Robot. Auton. Syst. 2020, 132, 103608. [Google Scholar] [CrossRef]
- Kragelund, S.; Walton, C.; Kaminer, I.; Dobrokhodov, V. Generalized Optimal Control for Autonomous Mine Countermeasures Missions. IEEE J. Ocean. Eng. 2020, 46, 466–496. [Google Scholar] [CrossRef]
- Zhao, L.; Bai, Y.; Wang, F.; Bai, J. Path Planning for Autonomous Surface Vessels Based on Improved Artificial Fish Swarm Algorithm: A Further Study. Ships Offshore Struct. 2023, 18, 1325–1337. [Google Scholar] [CrossRef]
- Brekhovskikh, L.M.; Lysanov, Y.P.; Beyer, R.T. Fundamentals of Ocean Acoustics; Springer: New York, NY, USA, 1991. [Google Scholar]
- Otnes, R.; Asterjadhi, A.; Casari, P.; Goetz, M.; Husøy, T.; Nissen, I.; Rimstad, K.; Van Walree, P.; Zorzi, M. Underwater Acoustic Networking Techniques; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Domingo, M.C. Overview of Channel Models for Underwater Wireless Communication Networks. Phys. Commun. 2008, 1, 163–182. [Google Scholar] [CrossRef]
- Galceran, E.; Campos, R.; Palomeras, N.; Carreras, M.; Ridao, P. Coverage Path Planning with Realtime Replanning for Inspection of 3D Underwater Structures. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 6586–6591. [Google Scholar]
- Espensen, A.H.; Aver, O.E.; Poulsen, P.K.; Sung, I.; Nielsen, P. Seabed Coverage Path Re-Routing for an Autonomous Surface Vehicle. In Proceedings of the Distributed Computing and Artificial Intelligence, 16th International Conference, Special Sessions; Springer: Berlin/Heidelberg, Germany, 2020; pp. 85–92. [Google Scholar]
- Alqurashi, F.S.; Trichili, A.; Saeed, N.; Ooi, B.S.; Alouini, M.-S. Maritime Communications: A Survey on Enabling Technologies, Opportunities, and Challenges. In IEEE Internet of Things Journal; Springer: Berlin/Heidelberg, Germany, 2022. [Google Scholar]
- Guang, X.; Liu, C.; Qu, W.; Zhao, Z. Dynamic Data Collection Algorithm Based on Mobile Edge Computing in Underwater Internet of Things. J. Cloud Comput. 2023, 12, 46. [Google Scholar] [CrossRef]
- Cai, S.; Zhu, Y.; Wang, T.; Xu, G.; Liu, A.; Liu, X. Data Collection in Underwater Sensor Networks Based on Mobile Edge Computing. IEEE Access 2019, 7, 65357–65367. [Google Scholar] [CrossRef]
- Li, Y.; Li, S.; Zhang, Y.; Zhang, W.; Lu, H. Dynamic Route Planning for a USV-UAV Multi-Robot System in the Rendezvous Task with Obstacles. J. Intell. Robot. Syst. 2023, 107, 52. [Google Scholar] [CrossRef]
- Li, B.; Page, B.R.; Hoffman, J.; Moridian, B.; Mahmoudian, N. Rendezvous Planning for Multiple AUVs with Mobile Charging Stations in Dynamic Currents. IEEE Robot. Autom. Lett. 2019, 4, 1653–1660. [Google Scholar] [CrossRef]
- Page, B.R.; Mahmoudian, N. AUV Docking and Recovery with USV: An Experimental Study. In Proceedings of the OCEANS 2019—Marseille, Marseille, France, 17–20 June 2019; pp. 1–5. [Google Scholar]
- Li, J.; Zhang, G.; Li, B. Robust Adaptive Neural Cooperative Control for the USV-UAV Based on the LVS-LVA Guidance Principle. J. Mar. Sci. Eng. 2022, 10, 51. [Google Scholar] [CrossRef]
- Li, W.; Ge, Y.; Guan, Z.; Gao, H.; Feng, H. NMPC-Based UAV-USV Cooperative Tracking and Landing. J. Frankl. Inst. 2023, 360, 7481–7500. [Google Scholar] [CrossRef]
- Ross, J.; Seto, M.; Johnston, C. Autonomous Landing of Rotary Wing Unmanned Aerial Vehicles on Underway Ships in a Sea State. J. Intell. Robot. Syst. 2022, 104, 1. [Google Scholar] [CrossRef]
- Polvara, R.; Sharma, S.; Wan, J.; Manning, A.; Sutton, R. Vision-Based Autonomous Landing of a Quadrotor on the Perturbed Deck of an Unmanned Surface Vehicle. Drones 2018, 2, 15. [Google Scholar] [CrossRef]
- Polvara, R.; Sharma, S.; Wan, J.; Manning, A.; Sutton, R. Autonomous Vehicular Landings on the Deck of an Unmanned Surface Vehicle Using Deep Reinforcement Learning. Robotica 2019, 37, 1867–1882. [Google Scholar] [CrossRef]
- Liu, J.; Su, Z.; Xu, Q. UAV-USV Cooperative Task Allocation for Smart Ocean Networks. In Proceedings of the 2021 IEEE 23rd Int Conf on High Performance Computing & Communications; 7th Int Conf on Data Science & Systems; 19th Int Conf on Smart City; 7th Int Conf on Dependability in Sensor, Cloud & Big Data Systems & Application (HPCC/DSS/SmartCity/DependSys), Haikou, China, 20–22 December 2021; pp. 1815–1820. [Google Scholar]
- Shuhang, L.; Chenglong, X.; Xiande, W.; Donghui, W. Task Cooperative Assignment for Heterogeneous Platforms Composed of UAV and USV. In Proceedings of the International Conference on Autonomous Unmanned Systems, Xi’an, China, 23–25 September 2022; Springer: Berlin/Heidelberg, Germany, 2022; pp. 2823–2832. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rank | References | Pub. Year | No. of Citations | Journal Title |
|---|---|---|---|---|
| 1 | [46] | 2010 | 160 | International Journal of Robotics Research |
| 2 | [47] | 2011 | 158 | Journal of Field Robotics |
| 3 | [48] | 2012 | 156 | IEEE Journal on Selected Areas in Communications |
| 4 | [49] | 2013 | 115 | Journal of Field Robotics |
| 5 | [41] | 2018 | 100 | IEEE Systems Journal |
| 6 | [32] | 2020 | 76 | IEEE Internet of Things Journal |
| 7 | [50] | 2010 | 58 | 2010 IEEE International Conference on Robotics and Automation (ICRA) |
| 8 | [24] | 2019 | 42 | Journal of Network and Computer Applications |
| 9 | [51] | 2020 | 34 | IEEE Internet of Things Journal |
| 10 | [35] | 2018 | 34 | IEEE Sensors Journal |
| References | Platforms | Method Category | Method | Comments | Environment | Implementation |
|---|---|---|---|---|---|---|
| [72] | AUV | AI-based method | Deep reinforcement learning | Integrating both acoustic and optical technologies | Python 3.8 | Simulation |
| [73] | Multiple AUVs | AI-based method | Deep reinforcement learning | Data collection with multiple complex tasks simultaneously | Python | Simulation |
| [74] | USV | AI-based method | Deep reinforcement learning | Stochastic arrived data and the random emergence and movement of dynamic obstacles | Python | Simulation |
| [75] | USV | AI-based method | Deep reinforcement learning | Arrived data and dynamic obstacles are stochastic | Python | Simulation |
| [76] | AUV | AI-based method | Q-learning | Improve energy efficiency of sensor nodes | Not mentioning | Simulation |
| [36] | Multiple AUVs | AI-based method | Q-learning | Balance the energy consumption of a network and extend the network’s lifetime | MATLAB | Simulation |
| [12] | Multiple USVs | AI-based method | Reinforcement learning | In fully unknown environments, and integrating communication channels | MATLAB | Simulation |
| [77] | AUV | AI-based method | Reinforcement learning | Dynamic underwater conditions comprising obstacles and small drifts | MATLAB | Simulation |
| [24] | AUV | Coverage planning | Lawn mower path | AUV is responsible for nominating the Cluster Head | Not mentioning | Simulation |
| [78] | AUV | Coverage planning | On-the-way fair data freshness | Improved the overall data freshness at the cost of data collection delay | Not mentioning | Simulation |
| [35] | AUV | Coverage planning | Lawn mower pattern path-planning | Support the long-range AUVs and the uniform energy consumption of sensor nodes | MATLAB | Simulation |
| [79] | AUV | Coverage planning | Lawn mower pattern path-planning | Maximize the duration of the cooperative works | MATLAB | Simulation |
| [47] | AUV | Coverage planning | Tranquill ocean path planner | Maximize the information value while minimizing deviation due to ocean currents | / | Experiment |
| [80] | AUV | Exact approach | Iterative local search | Maximize the completeness of the data collected | Not mentioning | Simulation |
| [81] | Multiple AUVs | Exact approach | Dynamic programming | Optimize safety, energy consumption, and cooperation | Not mentioning | Simulation |
| [48] | AUV | Exact approach | Concorde | Robust to channel variations and interference | C++ | Simulation |
| [82] | AUV | Exact approach | Concorde | Communicating with multiple nodes at once | C++ | Simulation |
| [83] | AUV | Heuristic method | Greedy algorithm | Consider the energy consumption of an AUV and value of information (VoI) | Not mentioning | Simulation |
| [84] | Multiple AUVs | Heuristic method | A* Energy | Reduce the energy consumption of multi-AUV data acquisition systems | MATLAB | Simulation |
| [85] | AUV | Heuristic method | A* | With predictions of ocean currents | Not mentioning | Simulation |
| [49] | AUV | Heuristic method | Minimum expected risk planner | Consider uncertainty in the ocean current predictions | \ | Experiment |
| [86] | AUV | Heuristic method | A* | With predictions of ocean currents | Not mentioning | Simulation |
| [87] | AUV-USV | Meta-heuristic | Shuffled frog-leaping algorithm | Optimize the interaction schedule between USV and multiple AUVs | Not mentioning | Simulation |
| [22] | AUV | Meta-heuristic | Grey wolf optimizer (GWO) | Validated on the real-world dataset (Canadian NEPTUNE [88]) | MATLAB | Simulation |
| [21] | Multiple USVs | Meta-heuristic | Improved partheno-genetic algorithm | Path length and the workload balance between USVs are considered | MATLAB | Simulation |
| [89] | Multiple AUVs | Meta-heuristic | Backtracking search optimization | High coverage ratio and low delay | Castalia | Simulation |
| [90] | Multiple USVs | Meta-heuristic | Immune algorithm | Include obstacle avoidance | MATLAB | Simulation |
| [91] | AUV | Meta-heuristic | Firefly algorithm | Consider the communication range of sensor nodes and the kinematics of AUVs | Not mentioning | Simulation |
| [92] | AUV | Meta-heuristic | Genetic algorithm | Reduce energy consumption with mobility consideration | Not mentioning | Simulation |
| [93] | AUV | Meta-heuristic | Ant colony optimization | Consider the angle control in AUV operation | Not mentioning | Simulation |
| [32] | AUV | Meta-heuristic | Ant colony optimization | Introduce the energy-consumption utility | MATLAB | Simulation |
| [94] | AUV | Meta-heuristic | Genetic algorithm | Overcome the kinematic nonholonomic constraints | MATLAB | Simulation |
| [95] | AUV | Meta-heuristic | Genetic algorithm | Consider non-holonomic constraints | Not mentioning | Simulation |
| [96] | AUV | Meta-heuristic | Genetic algorithm | Capture the time-sensitive nature of collected information | Not mentioning | Simulation |
| [97] | AUV | Meta-heuristic | Genetic algorithm | Good stability and convergence | Not mentioning | Simulation |
| [98] | AUV | Online-planning method | Grouping-based dynamic trajectory planning | Feasible for sensors with no position information | Not mentioning | Simulation |
| [99] | AUV | Online-planning method | Dynamic trajectory planning | Reduce energy consumption | Not mentioning | Simulation |
| [41] | AUV | Online-planning method | Dynamic value-based path planning | Balance energy consumption and prolong the underwater network lifetime | MATLAB | Simulation |
| [100] | Multiple AUVs | Online-planning method | Dynamic path planning | Dynamically choose the next node with recent network status information | Python 2.7 | Simulation |
| [26] | AUV | Other | Joint optimized data collection algorithm | Consider residual energy of nodes and VoI | MATLAB | Simulation |
| [101] | AUV | Other | Markov decision processes | Delay-aware and energy-efficient | MATLAB | Simulation |
| [102] | UAV | Other | Fermat point algorithm | A vehicle routing problem (VRP) with pickup | Not mentioning | Simulation |
| [103] | AUV | Other | Spatial geometric-based | Reduce data collection delays and prolong network lifetime | MATLAB | Simulation |
| [104] | AUV | Other | Feedback planning | Consider ocean currents and localization uncertainty | Not mentioning | Simulation |
| [105] | AUV | Other | Artificial potential field (APF) | Obstacle avoidance with energy-saving | Not mentioning | Experiment |
| [51] | Multiple AUVs | Other | Artificial potential field (APF) | Improve the flexibility and controllability of the AUV flock-based networks | MATLAB | Simulation |
| [106] | AUV | Other | Extended Euler circuit | Minimize the average data reporting delay through resurfacing | Not mentioning | Simulation |
| [50] | AUV | Other | Centroid-tracking, waypoint selection algorithm | Able to track a dynamically evolving ocean feature | \ | Experiment |
| [46] | Multiple AUVs | Other | Centroid-tracking, waypoint selection algorithm | Extend [50] by incorporation of multiple vehicles | \ | Experiment |
| [107] | AUV | Other | Sequential quadratic programming | Takes motion constraints into consideration | Not mentioning | Simulation |
| [108] | AUV | Sampling-based method | Probabilistic roadmap | Inspect multiple goals while maintaining communication with the USV | Not mentioning | Simulation |
| [109] | AUV | Sampling-based method | Probabilistic roadmap | Consider the time duration limits | Not mentioning | Simulation |
| Category | Methods | Highlights | Drawbacks |
|---|---|---|---|
| Meta-heuristic methods | GA, PSO, ACO, SA, etc. |
|
|
| AI-based methods | RL |
|
|
| SOM |
|
| |
| Coverage planning | - |
|
|
| Heuristic and direct search | DP, greedy search, A*-variants |
|
|
| Online path planning | - |
|
|
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, L.; Bai, Y. Unlocking the Ocean 6G: A Review of Path-Planning Techniques for Maritime Data Harvesting Assisted by Autonomous Marine Vehicles. J. Mar. Sci. Eng. 2024, 12, 126. https://doi.org/10.3390/jmse12010126
Zhao L, Bai Y. Unlocking the Ocean 6G: A Review of Path-Planning Techniques for Maritime Data Harvesting Assisted by Autonomous Marine Vehicles. Journal of Marine Science and Engineering. 2024; 12(1):126. https://doi.org/10.3390/jmse12010126
Chicago/Turabian StyleZhao, Liang, and Yong Bai. 2024. "Unlocking the Ocean 6G: A Review of Path-Planning Techniques for Maritime Data Harvesting Assisted by Autonomous Marine Vehicles" Journal of Marine Science and Engineering 12, no. 1: 126. https://doi.org/10.3390/jmse12010126
APA StyleZhao, L., & Bai, Y. (2024). Unlocking the Ocean 6G: A Review of Path-Planning Techniques for Maritime Data Harvesting Assisted by Autonomous Marine Vehicles. Journal of Marine Science and Engineering, 12(1), 126. https://doi.org/10.3390/jmse12010126