
Innovative Solution of Torsional Vibration Reduction by Application of Pneumatic Tuner in Shipping Piston Devices




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Defining the Problem
3. Theory Analyzes
4. Experimental Verification
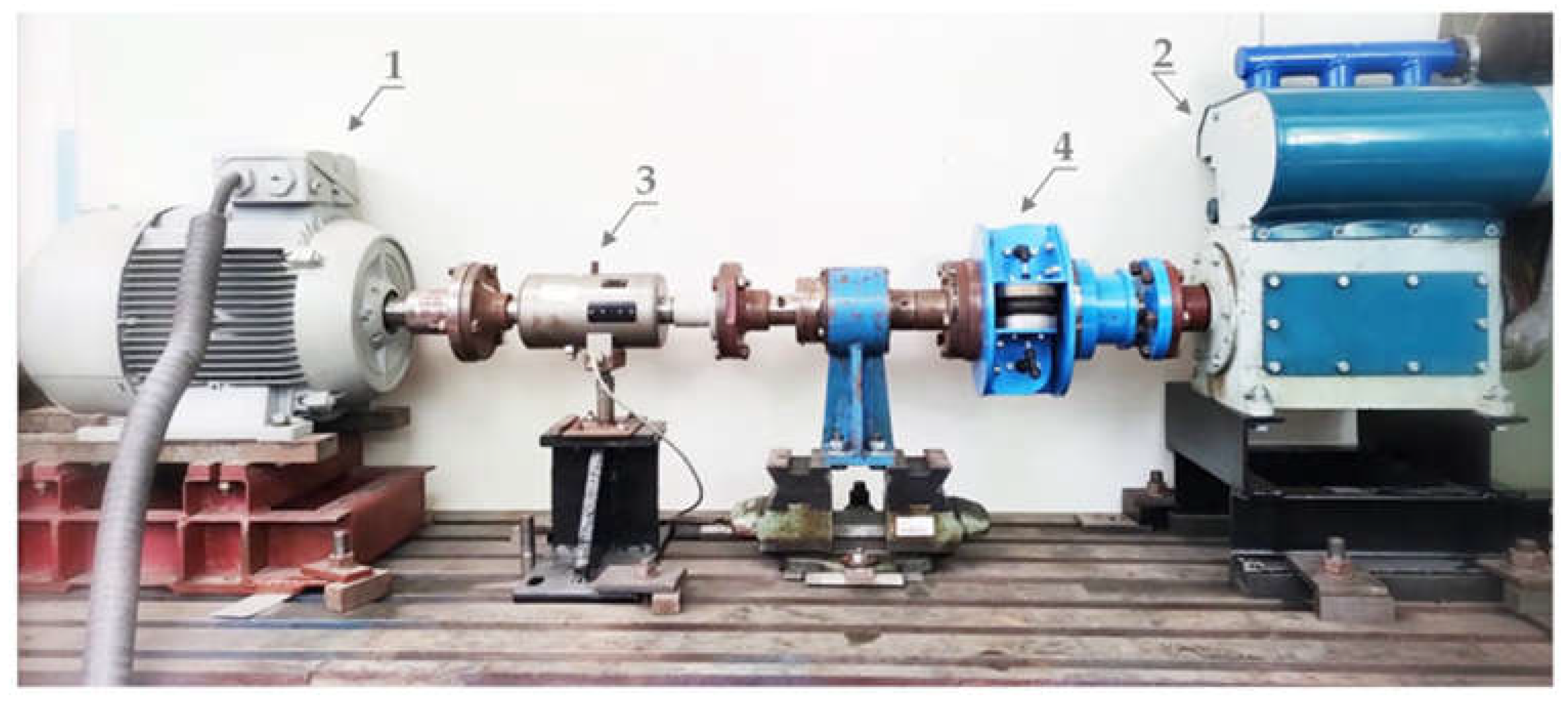
- Three-phase asynchronous electric motor: operating speeds vary by frequency changer SIEMENS with vector control, type: 1LE10011DB234AF4-Z; nominal power: 11 kW; nominal operating speed: 1470 rpm; number of poles: 4.
- Three-cylinder air compressor: type: ORLIK 3JSK-75; volume power: 50 m3h−1number of cylinders: 3; cylinder diameter: 82 mm; piston stroke: 70 mmmaximum overpressure: 10 bars.
- Torque sensor: MOM Kalibergyár, type: 7934; measurement range: 0 ÷ 500 Nm with accuracy 0.5 Nm.
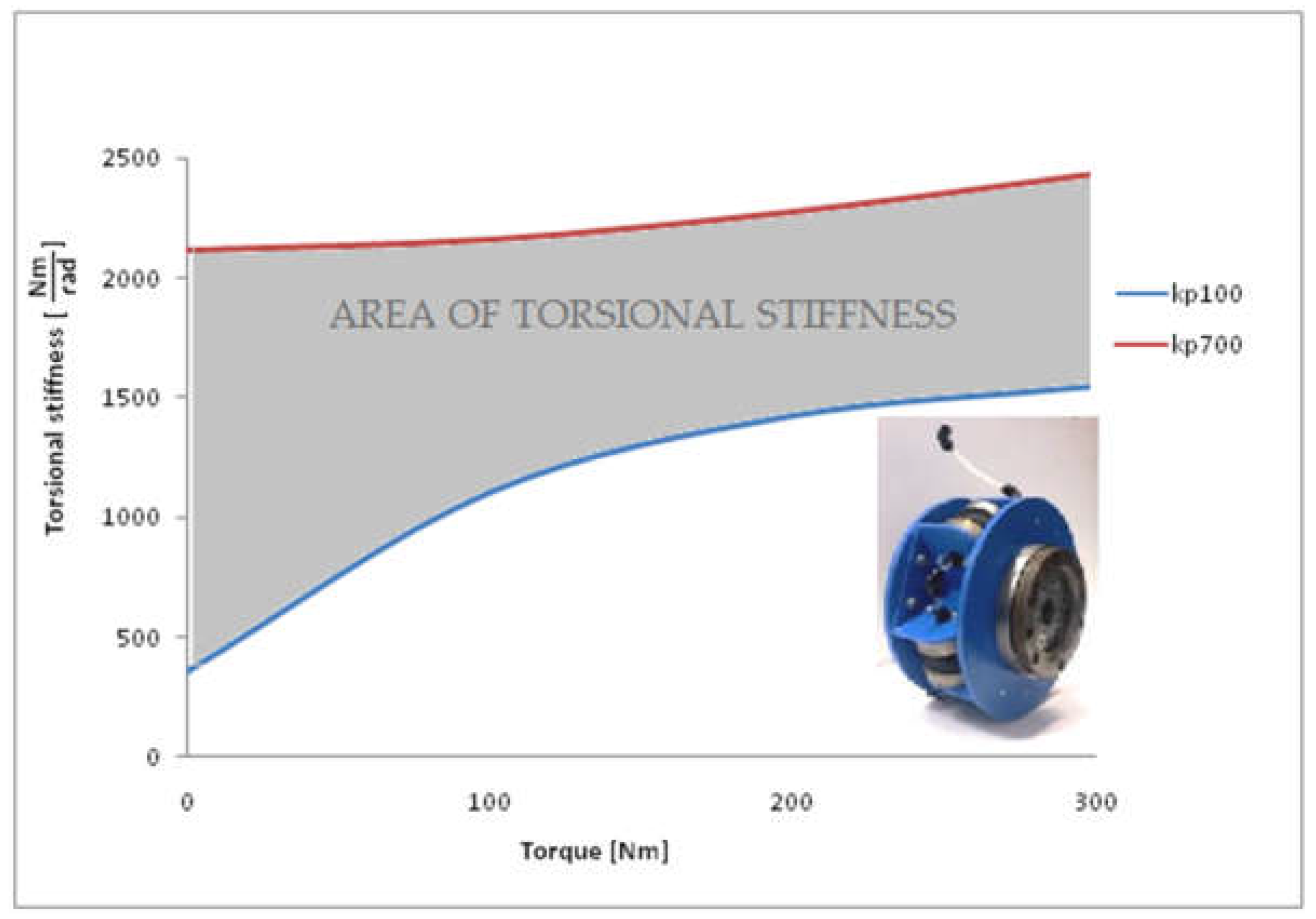
- Pneumatic tuner: type: 4-1/70-T-C; maximum diameter: 242 mm; spacing diameter: 152 mm; width: 129 mm; weight: 11.6 kg.
5. Results and Discussion
- The courses of all cylinders are similar to courses of one-cylinder deactivation. In the event of a single cylinder being deactivated, the progresses were moved to the area of higher dynamic load values.
- If the mechanical system worked with all cylinders’ activation in the over-resonance area with the most suitable torsional stiffness kp200, then when one cylinder is deactivated, the value of the dynamic load would increase for some speeds almost three times.
- In the case of a cylinder deactivation, the variance of values in the under-resonance area is less than the variance of the dynamic load values in the over-resonance area.
- The multiplication of the increase in dynamic oscillation with the cylinder deactivation in the under-resonance area compared to all cylinders running is less than a multiple of the increase in the work of the mechanical system in the over-resonance area when all cylinders are working, along with one-cylinder deactivation.
6. Conclusions
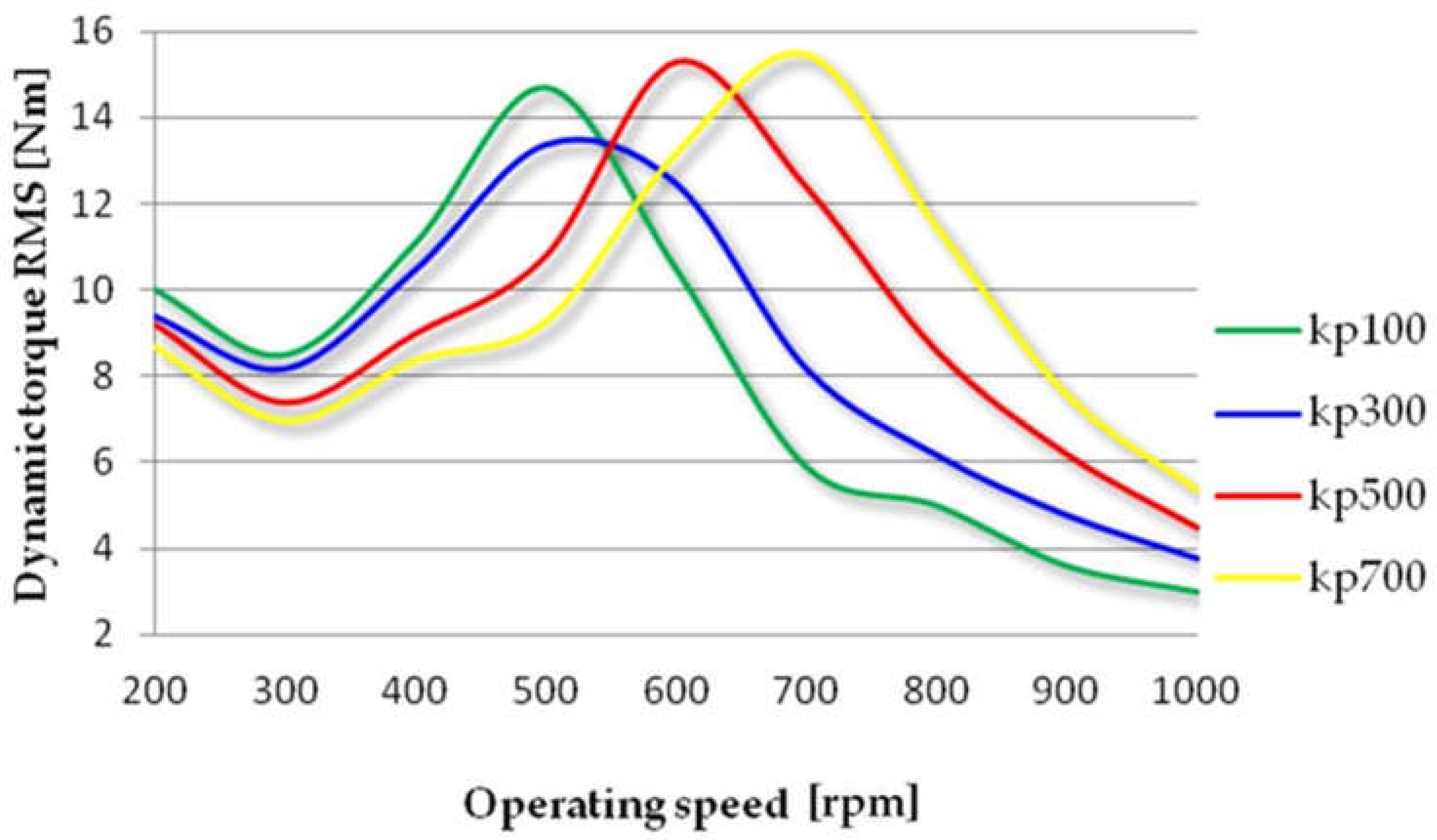
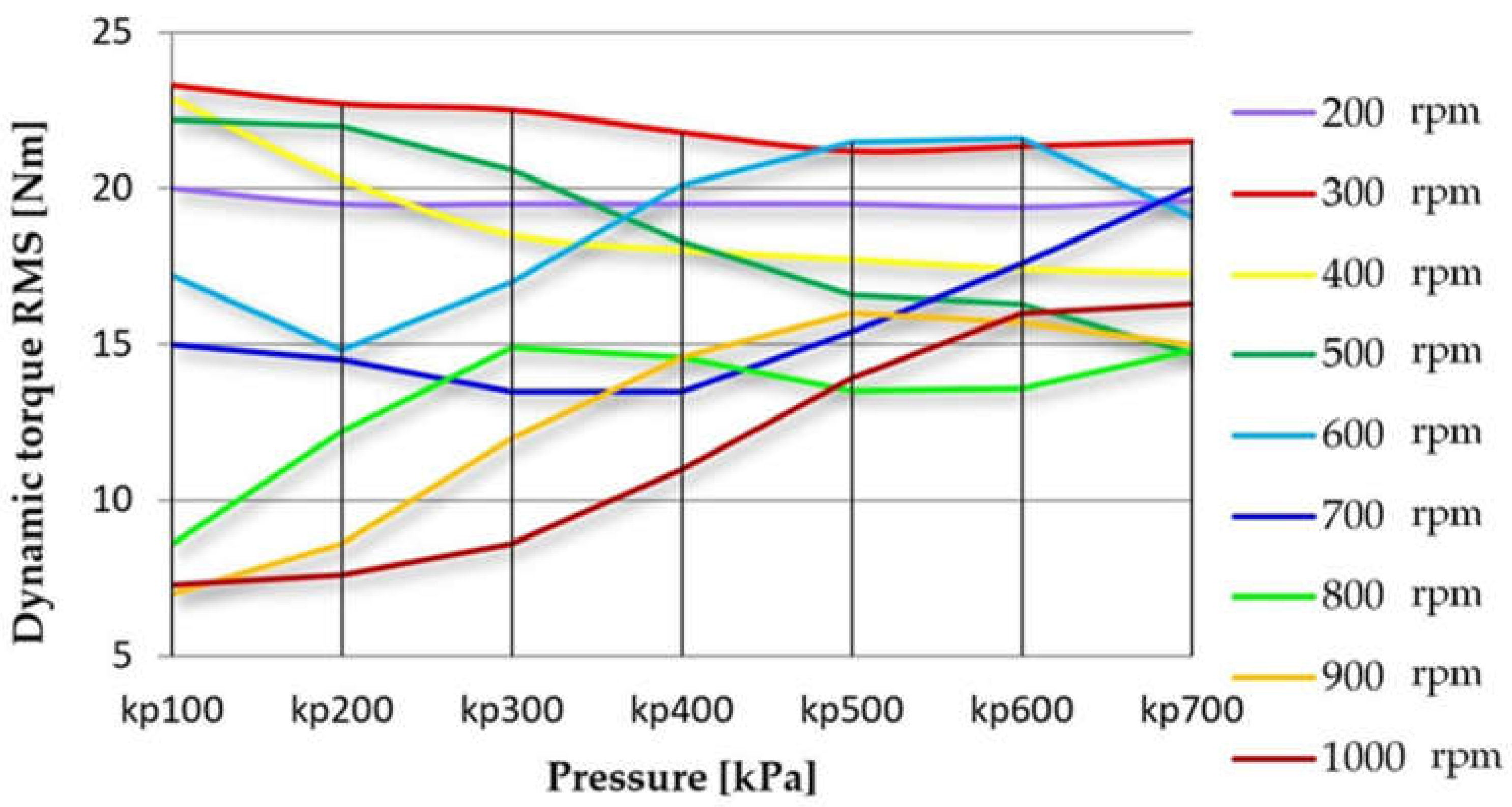
- From Figure 11, it can be seen that resonance area is dependent on torsional stiffness of the pneumatic tuner.
- If torsion stiffness is variable, it is possible to change a torsional vibration in resonance. For example, if torsional stiffness has a value of kp700, the resonant area exists at operating speed 700 rpm. Torsional vibrations have reached value of 15 Nm. By decreasing the torsional stiffness in the resonance area up to kp100, torsional vibrations will decrease to a value of 5 Nm. This fact can be considered as a three times vibration reduction. Such torsional vibration reduction by means of a smooth change in torsional stiffness can be realized over a wide range of operating speeds.
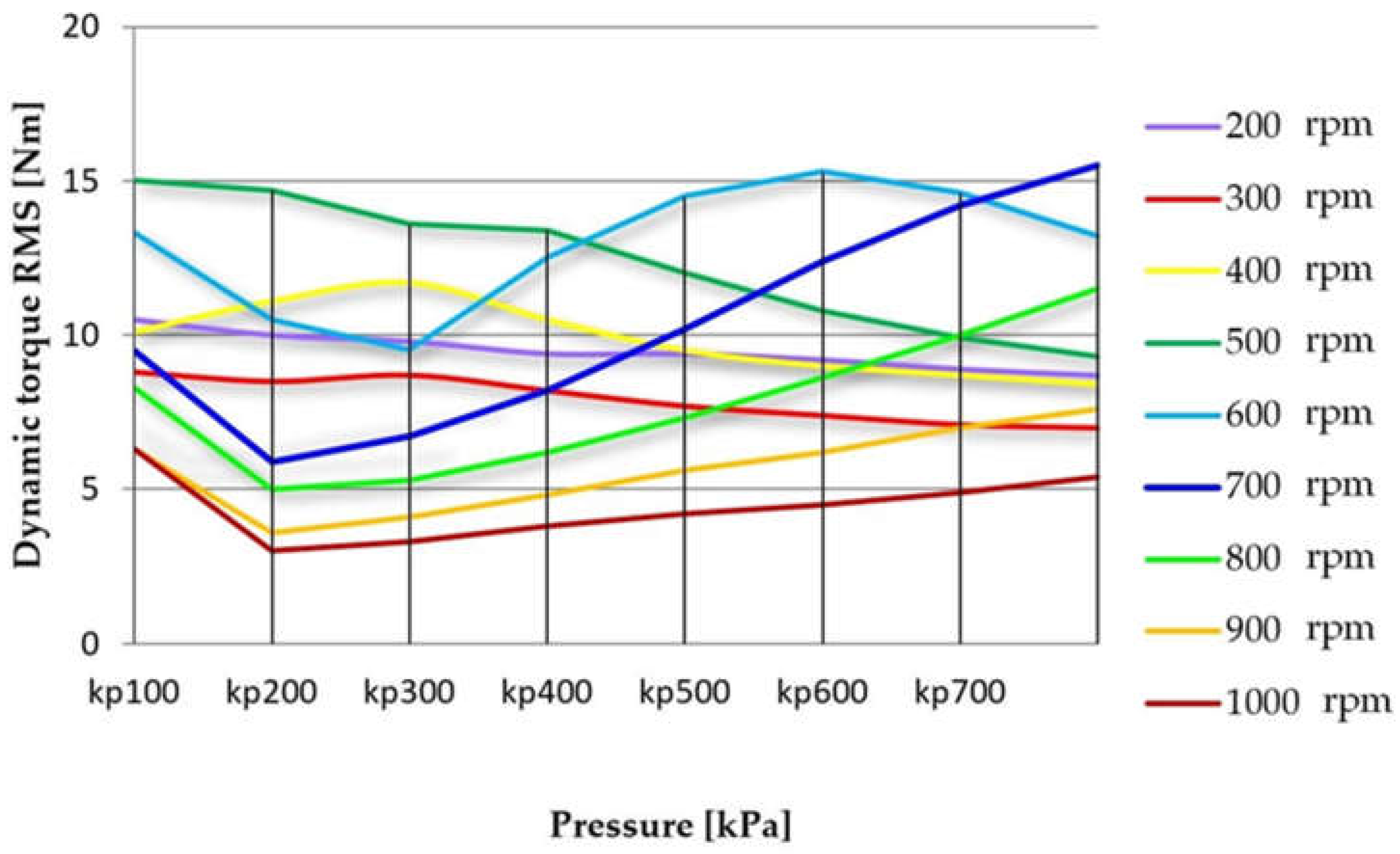
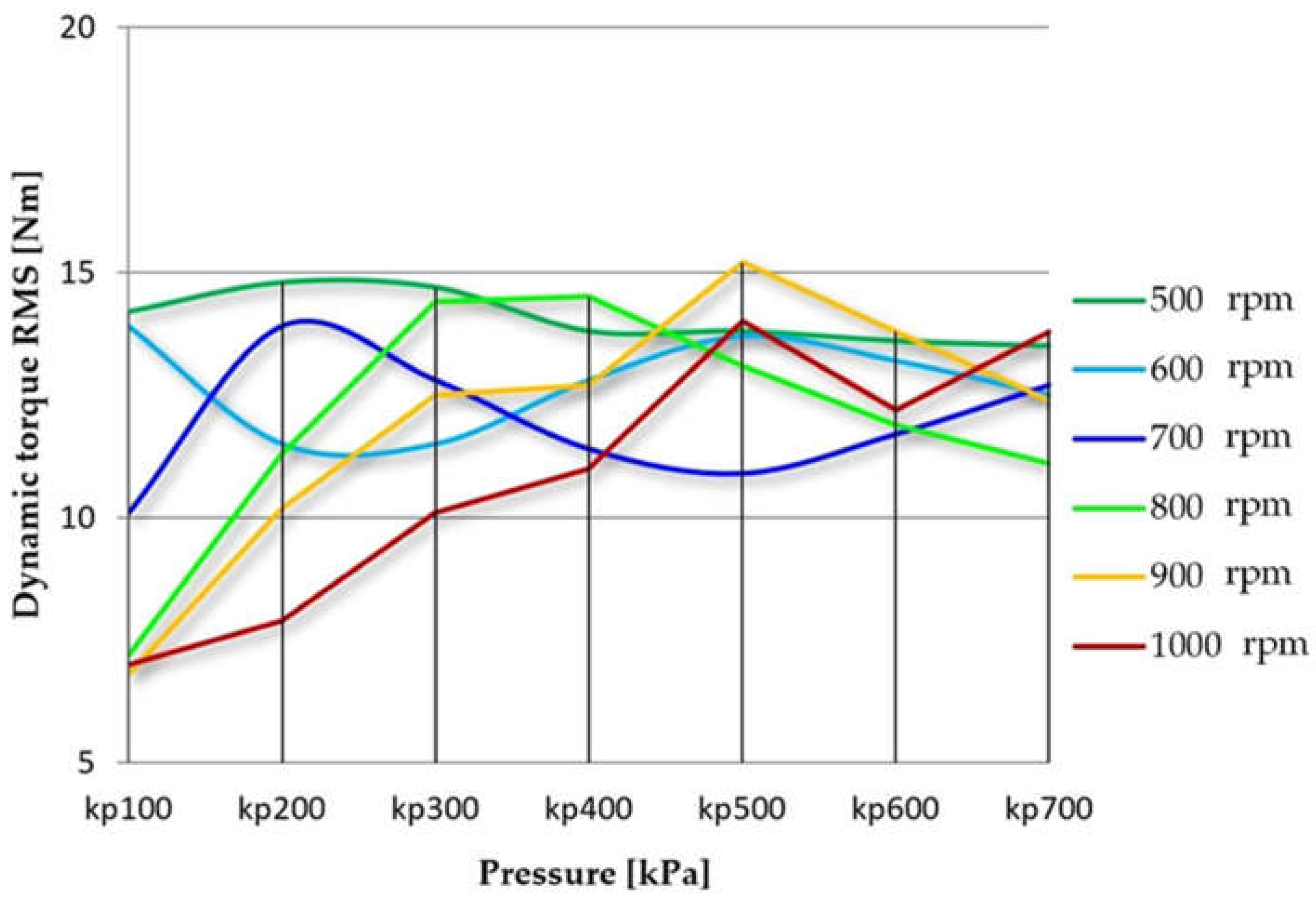
- Reduction of torsional vibrations can be also effectively carried out in cylinder deactivation. For example, at operating speed of 700 rpm, it is suitable to use a pneumatic tuner with torsional stiffness of kp200 at which the value of torsional vibration is 6 Nm in the operation mode of all cylinders. If we deactivate one cylinder at this operating speed, the value of the torsional vibration will increase to 14 Nm, and after two-cylinder deactivation, the value of the torsional vibration will reach a value of 13 Nm. Immediately, we can appropriately adjust the torsional stiffness as needed. For example, in the case with one-cylinder deactivation, the torsional stiffness will be held at kp400, and in case with two-cylinder deactivation, the torsional stiffness will be held at kp500. In these cases, we notice a decrease of 13 Nm and 11 Nm lower torsional vibrations, respectively. A change in torsional stiffness in order to minimize torsional vibrations can be realized smoothly during the working time of the mechanical drive.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Galdo, M.I.L. Marine Engines Performance and Emissions. J. Mar. Sci. Eng. 2021, 9, 280. [Google Scholar] [CrossRef]
- Chaban, A.; Perzyński, T.; Popenda, A.; Figura, R.; Levoniuk, V. Mathematical Modeling of Transient Processes in the Susceptible Motion Transmission in a Ship Propulsion System Containing a Shaft Synchronous Generator. Energies 2022, 15, 3266. [Google Scholar] [CrossRef]
- Piňosová, M.; Andrejiová, M.; Lumnitzer, E. Synergistic effect of risk factors and work environmental quality. Qual. Access Success 2018, 19, 154–159. [Google Scholar]
- Michaelides, M.P.; Herodotou, H.; Lind, M.; Watson, R.T. Port-2-Port Communication Enhancing Short Sea Shipping Performance: The Case Study of Cyprus and the Eastern Mediterranean. Sustainability 2019, 11, 1912. [Google Scholar] [CrossRef]
- Lewitzke, C.; Lee, P. Application of Elastomeric Components for Noise and Vibration Isolation in the Automotive Industry. In Proceedings of the SAE 2001 Noise & Vibration Conference & Exposition, Traverse City, MI, USA, 30 April–3 May 2001, SAE Technical Paper. ISSN 0148-719. [Google Scholar] [CrossRef]
- Wojnar, G.; Burdzik, R.; Wieczorek, A.N.; Konieczny, Ł. Multidimensional Data Interpretation of Vibration Signals Registered in Different Locations for System Condition Monitoring of a Three-Stage Gear Transmission Operating under Difficult Conditions. Sensors 2021, 21, 7808. [Google Scholar] [CrossRef]
- Grega, I.; Grega, R.; Homisin, J. Frequency of free vibration in systems with a power-law restoring force. Bull. Pol. Acad. Sci. Tech. Sci. 2021, 69, e136723. [Google Scholar] [CrossRef]
- UNCTAD. United Nations Conference on Trade and Development. 2021. Available online: https://unctad.org/webflyer/review-maritime-transport-2021 (accessed on 14 December 2022).
- COP26. United Nations Climate Change Conference. 2021. Available online: https://ukcop26.org (accessed on 10 December 2022).
- ESPO. Top 10 Environmental Priorities of EU Ports 2020. EcoPorts Publications. 2020. Available online: https://www.ecoports.com (accessed on 10 December 2022).
- IMO (International Maritime Organization). Introduction to IMO. Available online: http://www.imo (accessed on 12 December 2022).
- Marine Environment Protection Committee (MEPC) 77, IMO. 2021. Available online: https://www.imo.org (accessed on 14 December 2022).
- A European Green Deal. 2021. Available online: https://ec.europa.eu/info/strategy/priorities-2019-2024/european-green-deal_en (accessed on 12 December 2022).
- Union, Council of the European. “ST 12249 2022 Init, Proposal for a Council Regulation on an Emergency Intervention to Address High Energy Prices.” Photo of Publications Office of the European Union, Publications Office of the European Union, 14 September 2022. Available online: op.europa.eu/en/publication-detail/-/publication/74a1227a-3448-11ed-8b77-01aa75ed71a1/language-en (accessed on 14 December 2022).
- Puškár, M.; Jahnátek, A.; Kádárová, J.; Šoltésová, M.; Kovanič, Ľ.; Krivosudská, J. Environmental study focused on the suitability of vehicle certifications using the new European driving cycle (NEDC) with regard to the affair “dieselgate” and the risks of NOx emissions in urban destinations. Air Quality. Atmos. Health 2018, 12, 251–257. [Google Scholar] [CrossRef]
- Kulka, J.; Mantic, M.; Fedorko, G.; Molnar, V. Failure analysis concerning causes of wear for bridge crane rails and wheels. Eng. Fail. Anal. 2020, 110, 104441. [Google Scholar] [CrossRef]
- Puškár, M.; Jahnátek, A.; Kuric, I.; Kádárová, J.; Kopas, M.; Šoltésová, M. Complex analysis focused on influence of biodiesel and its mixture on regulated and unregulated emissions of motor vehicles with the aim to protect air quality and environment. Air Quality. Atmos. Health 2019, 12, 855–864. [Google Scholar] [CrossRef]
- Pástor, M.; Živčák, J.; Puškár, M.; Lengvarský, P.; Klačková, I. Application of Advanced Measuring Methods for Identification of Stresses and Deformations of Automotive Structures. Appl. Sci. 2020, 10, 7510. [Google Scholar] [CrossRef]
- Turoń, K.; Czech, P.; Tóth, J. Safety and security aspects in shared mobility systems. Sci. J. Silesian Univ. Technol. Ser. Transp. 2019, 104, 169–175. [Google Scholar] [CrossRef]
- Liptai, P.; Lumnitzer, E.; Moravec, M.; Piňosová, M. Analysis and Classification of Noise Sources of Conveyor Systems by Sound Visualizing on the Postal Package Sorting Line. Adv. Sci. Technol. Res. J. 2018, 12, 172–176. [Google Scholar] [CrossRef]
- Piňosová, M.; Andejiová, M.; Liptai, P.; Lumnitzer, E. Objective and subjective evaluation of the risk physical factors near to conveyor system. Adv. Sci. Technol. Res. J. 2018, 12, 188–196. [Google Scholar] [CrossRef]
- Lamas Galdo, M.I.; Rodriguez García, J.D.; Rebollido Lorenzo, J.M. Numerical Model to Analyze the Physicochemical Mechanisms Involved in CO2 Absorption by an Aqueous Ammonia Droplet. Int. J. Environ. Res. Public Health 2021, 18, 4119. [Google Scholar] [CrossRef]
- Moravec, M.; Ižaríková, G.; Liptai, P.; Badida, M.; Badidova, A. Development of psychoacoustic model based on the correlation of the subjective and objective sound quality assessment of automatic washing machines. Appl. Acoust. 2018, 140, 178–182. [Google Scholar] [CrossRef]
- Wojnar, G.; Irlik, M. Multicriteria train running model and simulator for railway capacity assessment. Transp. Probl. Int. Sci. J. 2022, 17, 199–212. [Google Scholar] [CrossRef]
- Czech, P.; Turoń, K.; Barcik, J. Autonomous vehicles: Basic issues. Sci. J. Sil. Univ. Technol. Ser. Transp. 2018, 100, 15–22. [Google Scholar] [CrossRef]
- Haris, A.; Motato, E.; Theodossiades, S.; Rahnejat, H.; Kelly, P. A study on torsional vibration attenuation in automotive drivetrains using absorbers with smooth and non-smooth nonlinearities. Appl. Math. Model. 2016, 46, 674–690. [Google Scholar] [CrossRef]
- Haris, A.; Motato, E.; Mohammadpour, M.; Theodossiades, S.; Rahnejat, H. On the effect of multiple parallel nonlinear absorbers in palliation of torsional response of automotive drivetrain. Int. J. Non-Linear Mech. 2017, 96, 22–35. [Google Scholar] [CrossRef]
- Motato, E.; Haris, A.; Theodossiades, S.; Mohammadpour, M.; Rahnejat, H. Targeted energy transfer and modal energy redistribution in automotive drivetrains. Nonlinear Dyn. 2017, 87, 169–190. [Google Scholar] [CrossRef]
- Zink, M.; Hausner, M. The centrifugal pendulum-type absorber. ATZ Worldw. 2009, 111, 42–47. [Google Scholar] [CrossRef]
- Manchi, V.; Sujatha, C. Torsional vibration reduction of rotating shafts for multiple orders using centrifugal double pendulum vibration absorber. Appl. Acoust. 2021, 174, 107768. [Google Scholar] [CrossRef]
- Liu, C.C.; Jing, X.J.; Chen, Z. Band stop vibration suppression using a passive X-shape structured lever-type isolation system. Mech. Syst. Sig. Process. 2016, 68–69, 342–353. [Google Scholar] [CrossRef]
- Liu, C.C.; Jing, X.J. Nonlinear vibration energy harvesting with adjustable stiffness, damping and inertia. Nonlinear Dyn. 2016, 88, 79–95. [Google Scholar] [CrossRef]
- Berbyuk, V. Weight-Vibration Pareto Optimization of a Triple Mass Flywheel for Heavy-Duty Truck Powertrains. Machines 2020, 8, 50. [Google Scholar] [CrossRef]
- Jang, D.I.; Yun, G.E.; Park, J.-E.; Kim, Y.-K. Designing an attachable and power-efficient all-in-one module of tunable vibration absorber based on magnetorheological elastomer. Smart Mater. Struct. 2018, 27, 085009. [Google Scholar] [CrossRef]
- Lee, K.H.; Park, J.E.; Kim, Y.K. Design of a stiffness variable flexible coupling using magnetorheological elastomer for torsional vibration reduction. J. Intell. Mater. Syst. Struct. 2019, 30, 2212–2221. [Google Scholar] [CrossRef]
- Xiang, B.; Wong, W. Electromagnetic vibration absorber for torsional vibration in high speed rotational machine. Mech. Syst. Signal Process. 2020, 140, 106639. [Google Scholar] [CrossRef]
- Synák, F.; Jakubovicová, L.; Klacko, M. Impact of the Choice of Available Brake Discs and Brake Pads at Different Prices on Selected Vehicle Features. Appl. Sci. 2022, 12, 7325. [Google Scholar] [CrossRef]
- Wieczorek, A.N.; Konieczny, Ł.; Burdzik, R.; Wojnar, G.; Filipowicz, K.; Kuczaj, M. A Complex Vibration Analysis of a Drive System Equipped with an Innovative Prototype of a Flexible Torsion Clutch as an Element of Pre-Implementation Testing. Sensors 2022, 22, 2183. [Google Scholar] [CrossRef]
- Kinnunen, K.; Laine, S.; Tiainen, T.; Viitala, R. Method for Adjusting Torsional Natural Frequencies of Powertrains with Novel Coupling Design. Machines 2022, 10, 162. [Google Scholar] [CrossRef]
- Krajnak, J.; Homisin, J.; Grega, R.; Kassay, P.; Urbansky, M. The failures of flexible couplings due to self-heating by torsional vibrations—Validation on the heat generation in pneumatic flexible tuner of torsional vibrations. Eng. Fail. Anal. 2021, 119, 104977. [Google Scholar] [CrossRef]
- Žuľová, L.; Grega, R.; Krajňák, J.; Fedorko, G.; Molnár, V. Optimization of noisiness of mechanical system by using a pneumatic tuner during a failure of piston machine. Eng. Fail. Anal. 2017, 79, 845–851. [Google Scholar] [CrossRef]
- Li, M.; Khonsari, M.; Yang, R. Dynamics analysis of torsional vibration induced by clutch and gear set in automatic transmission. Int. J. Automot. Technol. 2018, 19, 473–488. [Google Scholar] [CrossRef]
- Idehara, S.J.; Flach, F.L.; Lemes, D. Modeling of nonlinear torsional vibration of the automotive powertrain. J. Vib. Control. 2018, 24, 1774–1786. [Google Scholar] [CrossRef]
- Chen, L.; Zeng, R.; Jiang, Z. Nonlinear dynamical model of an automotive dual mass flywheel. Adv. Mech. Eng. 2015, 7, 1687814015589533. [Google Scholar] [CrossRef]
- Albers, A. Advanced Development of Dual Mass Flywheel (DMFW) Design-Noise Control for Today’s Automobiles, Dring, 2006. Available online: https://www.schaeffler.com/remotemedien/media/_shared_media/08_media_library/01_publications/schaeffler_2/symposia_1/downloads_11/1_Dual_Mass_Flywheel_1.pdf (accessed on 14 December 2022).
- Faust, H. What Transmission Systems Can Do for Downsizing and Downspeeding of Powertrains and Cylinder Deactivation. In Proceedings of the VDI Conference Drivetrain for Vehicles, Friedrichshafen, Germany, 24–25 June 2014; VDI Reports no. 2218. VDI-Verlag: Düsseldorf, Germany, 2014; pp. 419–441. [Google Scholar]
- Scheidt, M.; Brands, C.; Lang, M.; Kuhl, J.; Günther, M.; Medicke, M.; Vogler, C. Statische und dynamische Zylinderabschaltung an 4- und 3-Zylindermotoren. In Proceedings of the Internationaler Motorenkongress, Baden-Baden, Germany, 24–25 February 2015. [Google Scholar]
- Lu, X.; Ding, C.; Ramesh, A.K.; Shaver, G.M.; Holloway, E.; McCarthy, J.J.; Ruth, M.; Koeberlein, E.; Nielsen, D. Impact of cylinder deactivation on active diesel particulate filter regeneration at highway cruise conditions. Front. Mech. Eng. 2015, 1, 9. [Google Scholar] [CrossRef]
- Ramesh, A.K.; Shaver, G.M.; Allen, C.M.; Nayyar, S.; Gosala, D.B.; Parra, D.C.; Koeberlein, E.; McCarthy, J.; Nielsen, D. Utilizing low airflow strategies, including cylinder deactivation, to improve fuel efficiency and aftertreatment thermal management. Int. J. Engine Res. 2017, 18, 1005–1016. [Google Scholar] [CrossRef]
- Homisin, J.; Kassay, P.; Puskar, M.; Grega, R.; Krajnak, J.; Urbansky, M.; Moravic, M. Continuous tuning of ship propulsion system by means of pneumatic tuner of torsional oscillation. Int. J. Marit. Eng. 2021, 158, A231–A238. [Google Scholar] [CrossRef]
- Wang, K.; Zhou, J.; Xu, D. Sensitivity analysis of parametric errors on the performance of a torsion quasi-zero-stiffness vibration isolator. Int. J. Mech. Sci. 2017, 134, 336–346. [Google Scholar] [CrossRef]
- Dong, G.; Zhang, X.; Xie, S.; Yan, B.; Luo, Y. Simulated and experimental studies on a high-static-low-dynamic stiffness isolator using magnetic negative stiffness spring. Mech. Syst. Signal Process. 2017, 86, 188–203. [Google Scholar] [CrossRef]
- Homišin, J.; Grega, R.; Kaššay, P.; Fedorko, G.; Molnár, V. Removal of systematic failure of belt conveyor drive by reducing vibrations. Eng. Fail. Anal. 2019, 99, 192–202. [Google Scholar] [CrossRef]














Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Grega, R.; Krajnak, J.; Žuľová, L.; Kačír, M.; Kaššay, P.; Urbanský, M. Innovative Solution of Torsional Vibration Reduction by Application of Pneumatic Tuner in Shipping Piston Devices. J. Mar. Sci. Eng. 2023, 11, 261. https://doi.org/10.3390/jmse11020261
Grega R, Krajnak J, Žuľová L, Kačír M, Kaššay P, Urbanský M. Innovative Solution of Torsional Vibration Reduction by Application of Pneumatic Tuner in Shipping Piston Devices. Journal of Marine Science and Engineering. 2023; 11(2):261. https://doi.org/10.3390/jmse11020261
Chicago/Turabian StyleGrega, Robert, Jozef Krajnak, Lucia Žuľová, Matúš Kačír, Peter Kaššay, and Matej Urbanský. 2023. "Innovative Solution of Torsional Vibration Reduction by Application of Pneumatic Tuner in Shipping Piston Devices" Journal of Marine Science and Engineering 11, no. 2: 261. https://doi.org/10.3390/jmse11020261
APA StyleGrega, R., Krajnak, J., Žuľová, L., Kačír, M., Kaššay, P., & Urbanský, M. (2023). Innovative Solution of Torsional Vibration Reduction by Application of Pneumatic Tuner in Shipping Piston Devices. Journal of Marine Science and Engineering, 11(2), 261. https://doi.org/10.3390/jmse11020261