Leg Trajectory Planning for Quadruped Robots with High-Speed Trot Gait


Abstract
1. Introduction
2. Materials and Methods
2.1. Leg Design of the Quadruped Robot
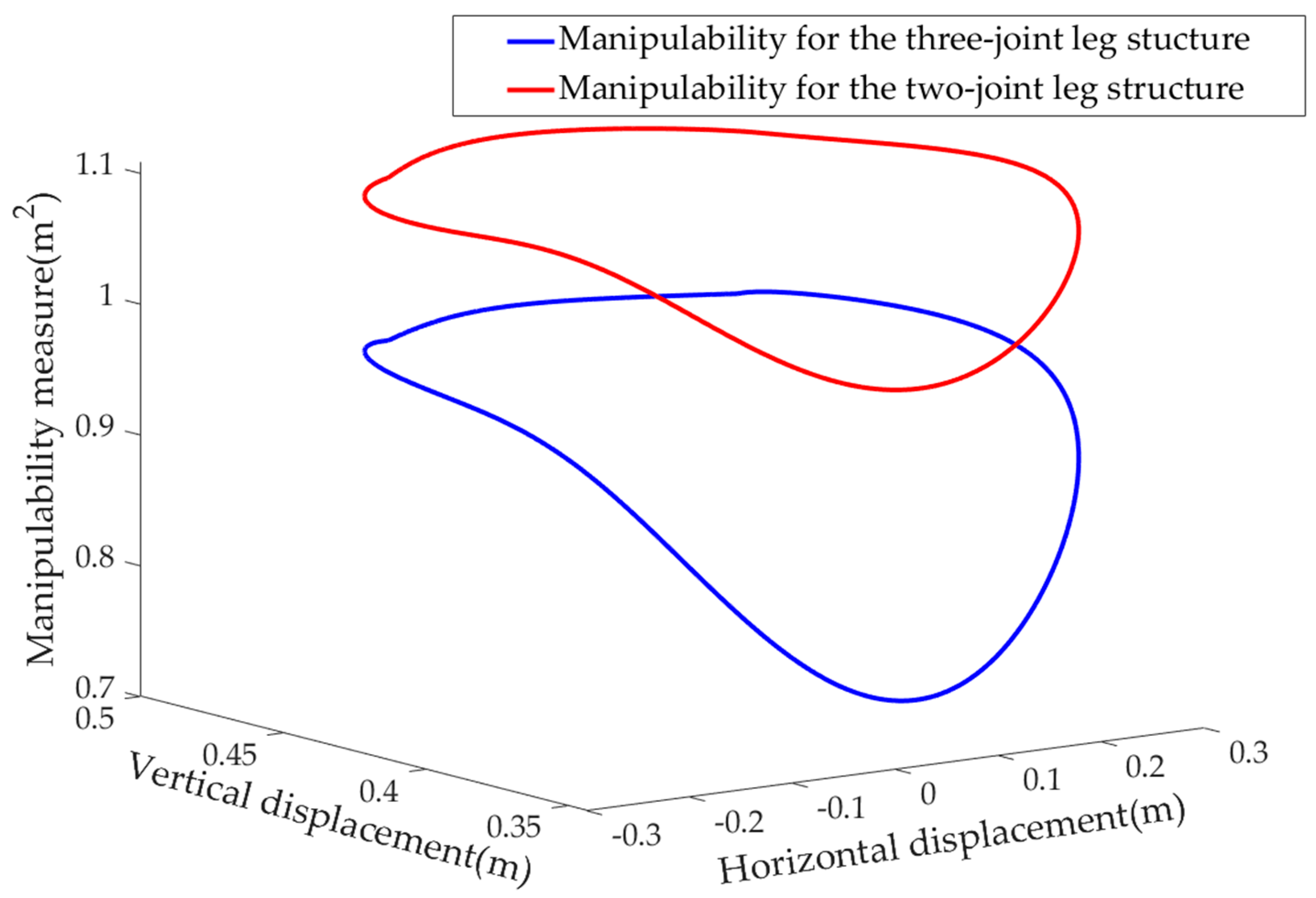
2.1.1. Leg Structure Comparison with Kinematics Analysis
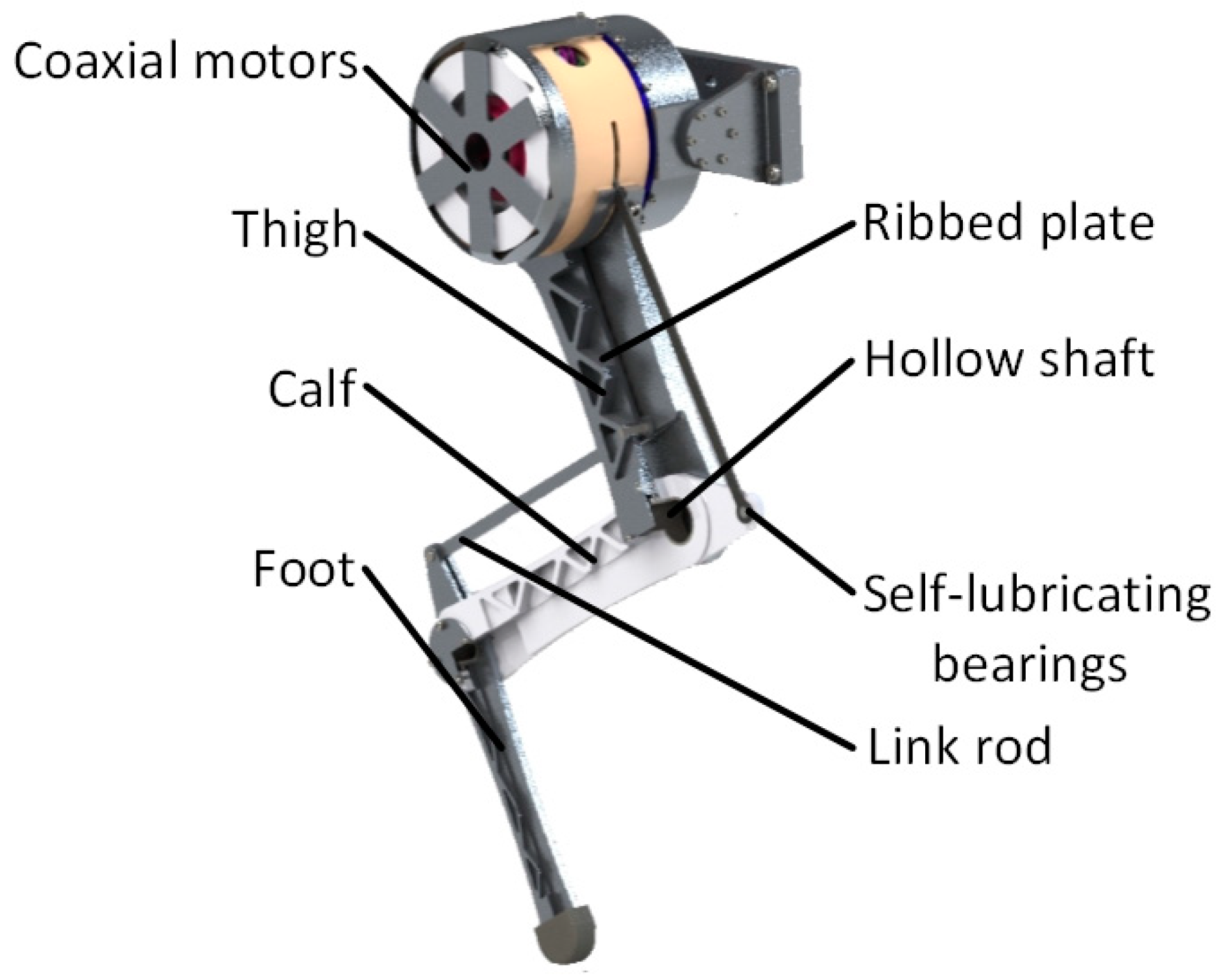
2.1.2. Detailed Leg Design with Three-joint Leg Structure
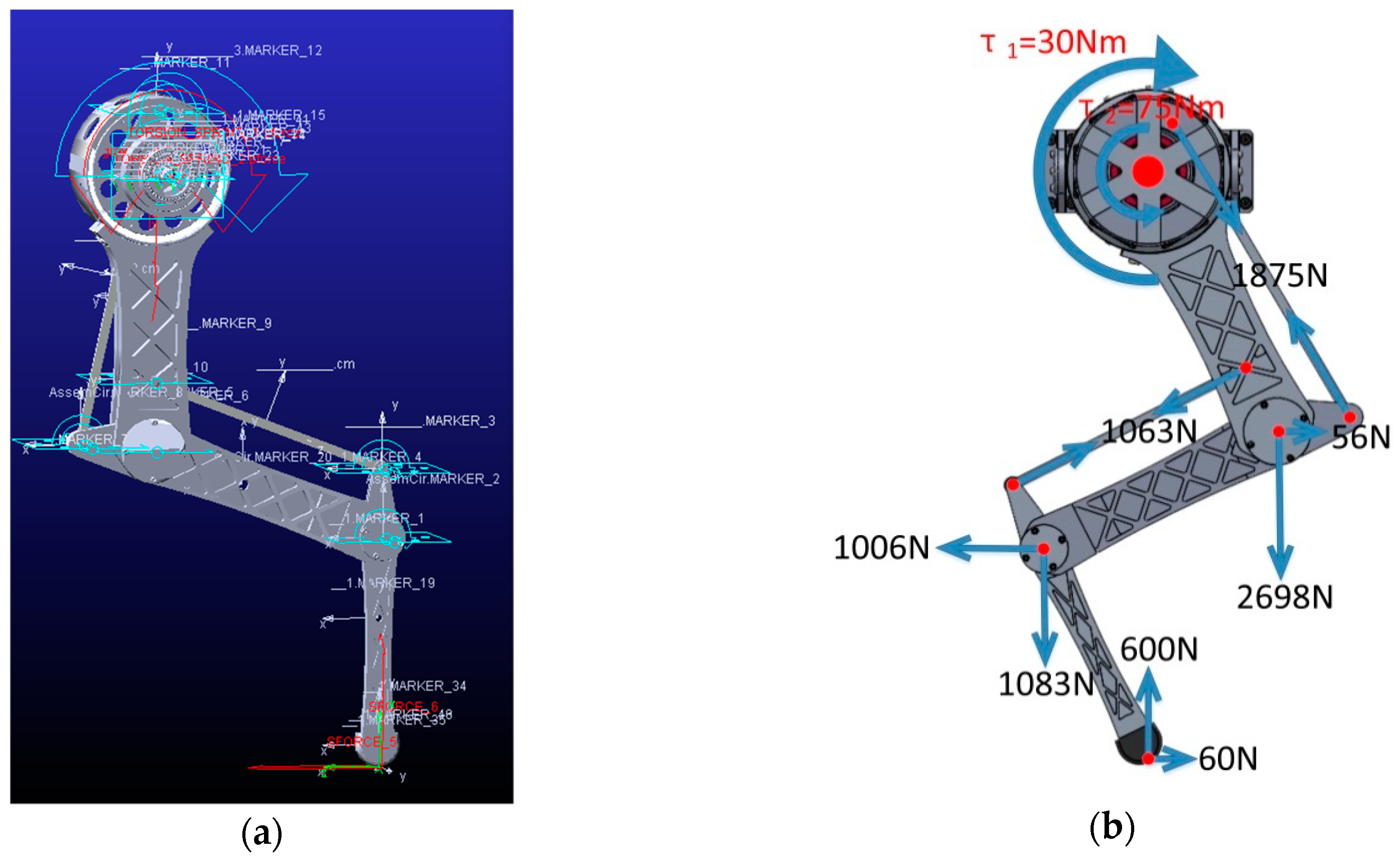
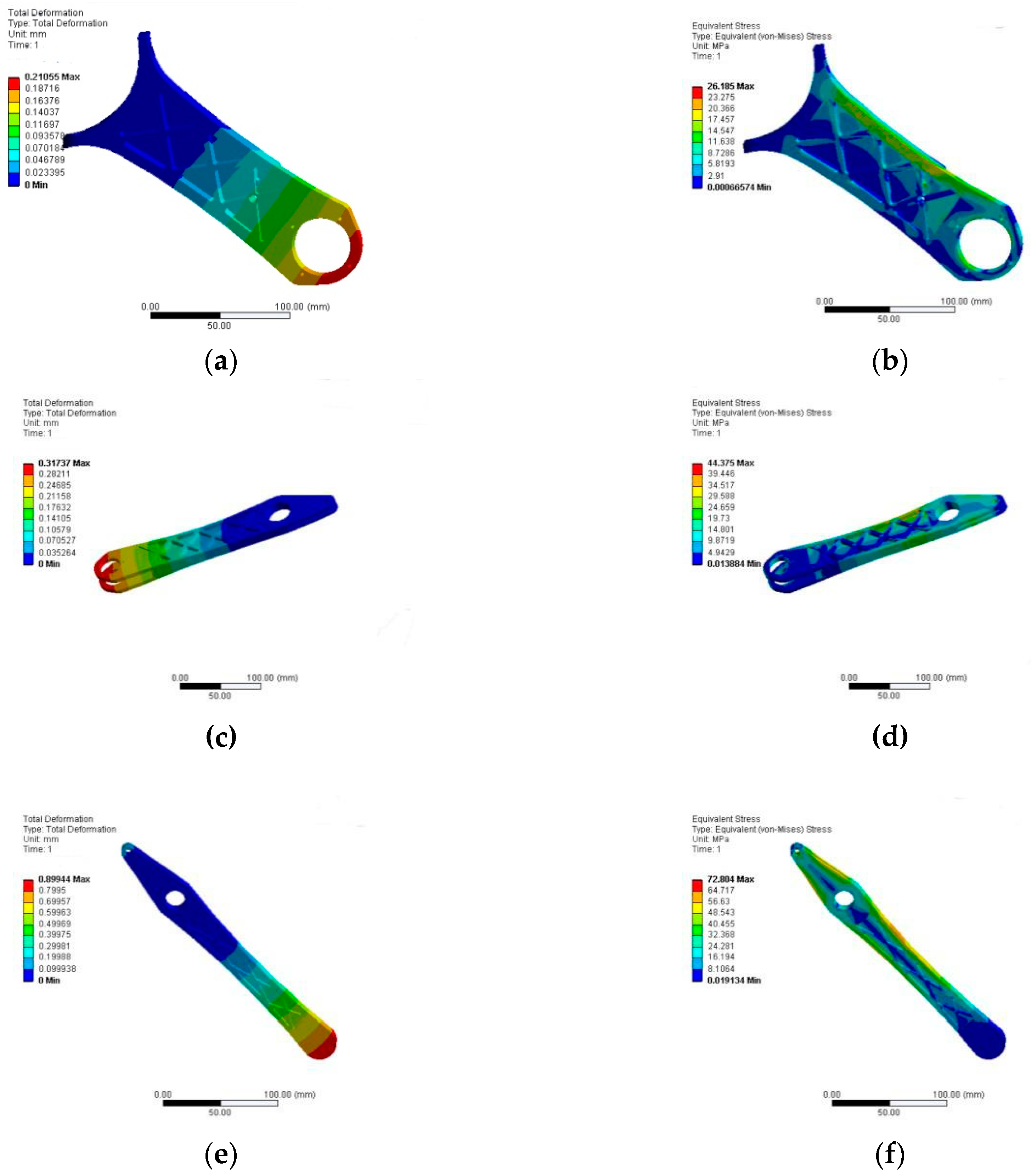
2.2. Finite Element Analysis (FEA) of the Leg
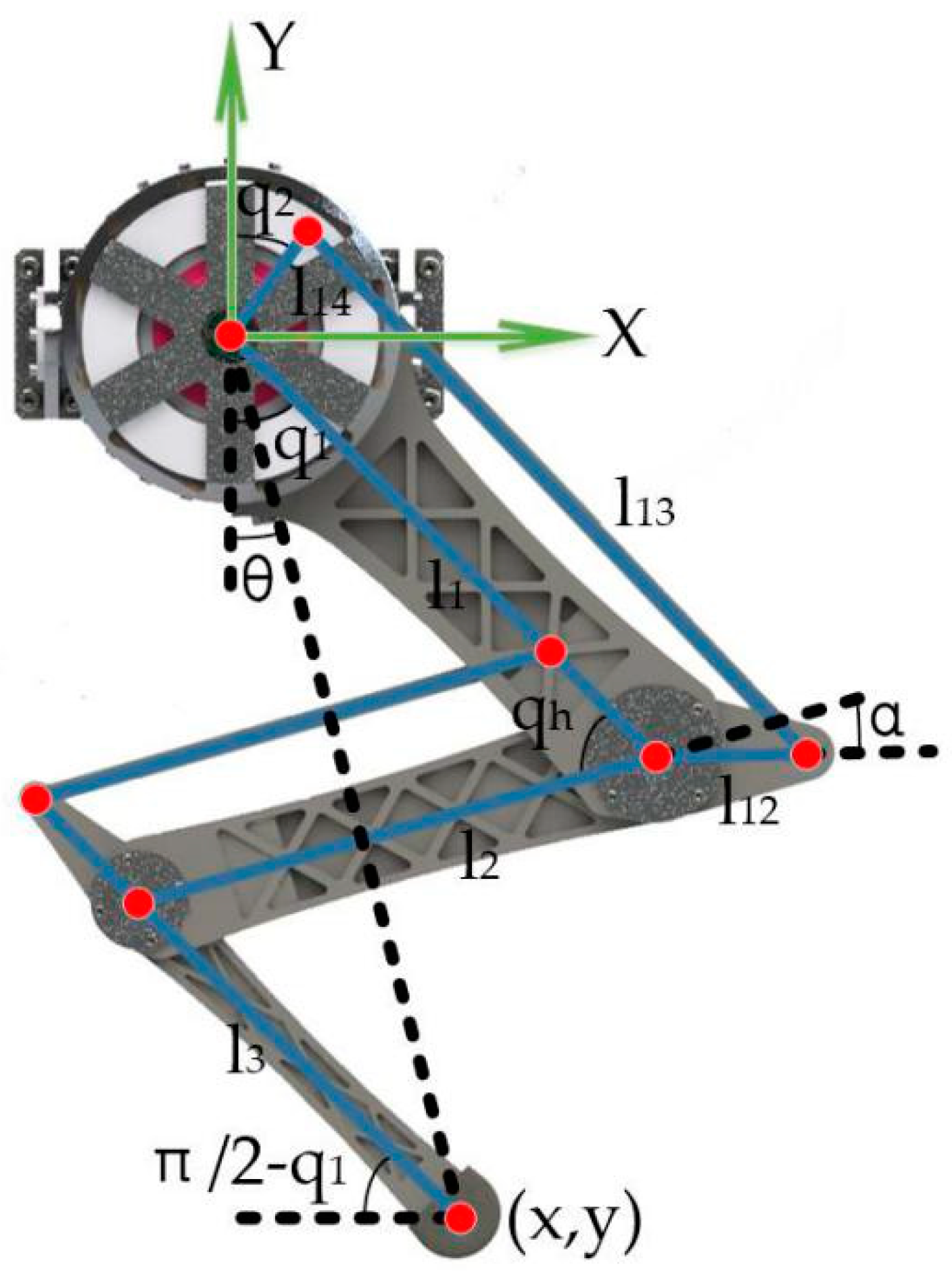
2.3. Inverse Kinematic Analysis
2.4. Leg Trajectory Planning
2.4.1. Stance Phase Trajectory Design
2.4.2. Swing Phase Trajectory Design
3. Results
3.1. The Features of Two Schemes
3.2. Simulation
3.3. Experiment
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Li, X.; Zhou, H.; Feng, H.; Zhang, S.; Fu, Y. Design and experiments of a novel hydraulic wheel-legged robot (WLR). In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 3292–3297. [Google Scholar]
- Fu, Y.; Luo, J.; Ren, D.; Zhou, H.; Li, X.; Zhang, S. Research on impedance control based on force servo for single leg of hydraulic legged robot. In Proceedings of the 2017 IEEE International Conference on Mechatronics and Automation (ICMA), Takamatsu, Japan, 6–9 August 2017; pp. 1591–1596. [Google Scholar]
- Bellicoso, C.D.; Jenelten, F.; Gehring, C.; Hutter, M. Dynamic locomotion through online nonlinear motion optimization for quadrupedal robots. IEEE Robot. Autom. Lett. 2018, 3, 2261–2268. [Google Scholar] [CrossRef]
- Hwangbo, J.; Lee, J.; Dosovitskiy, A.; Bellicoso, D.; Tsounis, V.; Koltun, V.; Hutter, M. Learning agile and dynamic motor skills for legged robot. Sci. Robot. 2019, 4, 1–13. [Google Scholar] [CrossRef]
- Raibert, M.; Blankespoor, K.; Nelson, G.; Playter, R. BigDog, the rough-terrain quadruped robot. Int. Fed. Autom. Control 2008, 41, 10822–10825. [Google Scholar] [CrossRef]
- Semini, C.; Tsagarakis, N.G.; Guglielmino, E.; Focchi, M.; Cannella, F.; Caldwell, D.G. Design of HyQ—A hydraulically and electrically actuated quadruped robot. J. Syst. Control Eng. 2011, 225, 831–849. [Google Scholar] [CrossRef]
- Spotmini Autonomous Navigation. Available online: https://youtu.be/Ve9kWX_KXus (accessed on 11 August 2018).
- Hutter, M.; Gehring, C.; Lauber, A.; Gunther, F.; Bellicoso, C.D.; Tsounis, V.; Fankhauser, P.; Diethelm, R.; Bachmann, S.; Bloesch, M.; et al. ANYmal—Toward legged robots for harsh environments. Adv. Robot. 2017, 31, 918–931. [Google Scholar] [CrossRef]
- Hyun, D.J.; Seok, S.; Lee, J.; Kim, S. High speed trot-running: Implementation of a hierarchical controller using proprioceptive impedance control on the MIT Cheetah. Int. J. Robot. Res. 2014, 33, 1417–1445. [Google Scholar] [CrossRef]
- Bledt, G.; Powell, M.J.; Katz, B.; Carlo, J.D.; Wensing, P.M.; Kim, S. MIT Cheetah 3: Design and control of a robust, dynamic quadruped robot. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 2245–2252. [Google Scholar]
- Wensing, P.M.; Wang, A.; Seok, S.; Otten, D.; Lang, J.; Kim, S. Proprioceptive actuator design in the MIT cheetah: Impact mitigation and high-bandwidth physical interaction for dynamic legged robots. IEEE Trans. Robot. 2017, 33, 509–522. [Google Scholar] [CrossRef]
- Yu, J.; Hooks, J.; Zhang, X.; Ahn, M.S.; Hong, D. A proprioceptive, force-controlled, non-anthropomorphic biped for dynamic locomotion. In Proceedings of the 2018 IEEE-RAS 18th International Conference on Humanoid Robots (Humanoids), Beijing, China, 6–9 November 2018; pp. 489–496. [Google Scholar]
- WildCat-The World’s Fastest Quadruped Robot. Available online: https://www.bostondynamics.com/wildcat (accessed on 14 March 2019).
- Ananthanarayanan, A.; Azadi, M.; Kim, S. Towards a bio-inspired leg design for high-speed running. Bioinspir. Biomin. 2012, 7, 046005. [Google Scholar] [CrossRef]
- Spröwitz, A.; Tuleu, A.; Vespignani, M.; Ajallooeian, M.; Badri, E.; Ijspeert, A.J. Towards dynamic trot gait locomotion-design, control, and experiments with Cheetah-cub, a compliant quadruped robot. Int. J. Robot. Res. 2013, 32, 932–950. [Google Scholar] [CrossRef]
- Rosendo, A.; Liu, X.; Nakatsu, S.; Shimizu, M.; Hosoda, K. A combined cpg-stretch reflex study on a musculoskeletal pneumatic quadruped. Biomimetic and Biohybrid Systems. Living Mach. 2014, 417–419. [Google Scholar] [CrossRef]
- Walter, R.M.; Carrier, D.R. Ground forces applied by galloping dogs. J. Exp. Biol. 2007, 210, 208–216. [Google Scholar] [CrossRef] [PubMed]
- Saputra, A.A.; Tay, N.N.W.; Toda, Y.; Botzheim, J.; Kubota, N. Bézier curve model for efficient bio-inspired locomotion of low cost four legged robot. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, South Korea, 9–14 October 2016. [Google Scholar]
- Lee, Y.L.; Lee, Y.H.; Lee, H.; Phan, L.T.; Kang, H.; Kim, U.; Jeon, J.; Choi, H.R. Trajectory design and control of quadruped robot for trotting over obstacles. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 4897–4902. [Google Scholar]
- Yoshikawa, T. Manipulability of Robotics Mechanism. Inter. J. Robot. Res. 1985, 4, 3–9. [Google Scholar] [CrossRef]
- Hogan, N. Impedance control—An approach to manipulation. I. Theory. II. Implementation. III. Applications. J. Dyn. Syst. Meas. Control 1985, 107, 1–24. [Google Scholar] [CrossRef]
- Jung, S.; Hsis, T.C.; Bonitz, R.G. Force tracking impedance control of robot manipulators under unknown environment. IEEE Trans. Control Syst. Technol. 2004, 12, 474–483. [Google Scholar] [CrossRef]
- Liu, M.; Xu, F.; Jia, K.; Yang, Q.; Tang, C. A stable walking strategy of quadruped robot based on foot trajectory planning. In Proceedings of the 2016 3rd International Conference on Information Science and Control Engineering (ICISCE), Beijing, China, 8–10 July 2016; pp. 799–803. [Google Scholar]
- Haberland, M.; Karssen, J.G.D.; Kim, S.; Wisse, M. The effect of swing leg retraction on running energy efficiency. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 3957–3962. [Google Scholar]
- Lee, J. Hierarchical Controller for Highly Dynamic Locomotion Utilizing Pattern Modulation and Impedance Control: Implementation on the MIT Cheetah Robot. Master’s Thesis, MIT, Cambridge, MA, USA, 2013. [Google Scholar]
- Laikago: A Four Leg Robot Is Coming to You. Available online: https://www.youtube.com/watch?v=d6Ja643GqL8 (accessed on 14 March 2019).
- Handzic, I.; Reed, K.B. Validation of a passive dynamic walker model for human gait analysis. In Proceedings of the 2013 35th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Osaka, Japan, 3–7 July 2013; pp. 6945–6948. [Google Scholar]
- Raibert, M.; Chepponis, M.; Brown, H.B., Jr. Running on four legs as though they were one. IEEE J. Robot. Autom. 1986, 2, 70–82. [Google Scholar] [CrossRef]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value | Units |
|---|---|---|---|
| Leg Mass | m | 5.500 | kg |
| Thigh Mass | m1 | 0.670 | kg |
| Thigh Length | l1 | 0.245 | m |
| Calf Mass | m2 | 0.446 | kg |
| Calf Length | l2 | 0.220 | m |
| Foot Mass | m3 | 0.168 | kg |
| Foot Length | l3 | 0.201 | m |
| Pn | X (mm) | Y (mm) |
|---|---|---|
| P0 | −170 | −470 |
| P1 | −(170 + Vdesire/((n + 1)Tsw)) | −470 |
| P2 | −300 | −360 |
| P3 | −300 | −360 |
| P4 | −300 | −360 |
| P5 | 0 | −360 |
| P6 | 0 | −360 |
| P7 | 0 | −320 |
| P8 | 300 | −320 |
| P9 | 300 | −320 |
| P10 | 170 + Vdesire/((n + 1)Tsw) | −470 |
| P11 | 170 | −470 |
| Mechanical Energy Consumption (J) | Battery Energy Consumption (J) | Efficiency | RMS Shoulder Current (A) | RMS Knee Current (A) | |
|---|---|---|---|---|---|
| Scheme I | 71.60 | 104.28 | 68.66% | 0.7735 | 0.2885 |
| Scheme II | 64.89 | 108.24 | 59.95% | 0.8163 | 0.2733 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zeng, X.; Zhang, S.; Zhang, H.; Li, X.; Zhou, H.; Fu, Y. Leg Trajectory Planning for Quadruped Robots with High-Speed Trot Gait. Appl. Sci. 2019, 9, 1508. https://doi.org/10.3390/app9071508
Zeng X, Zhang S, Zhang H, Li X, Zhou H, Fu Y. Leg Trajectory Planning for Quadruped Robots with High-Speed Trot Gait. Applied Sciences. 2019; 9(7):1508. https://doi.org/10.3390/app9071508
Chicago/Turabian StyleZeng, Xuanqi, Songyuan Zhang, Hongji Zhang, Xu Li, Haitao Zhou, and Yili Fu. 2019. "Leg Trajectory Planning for Quadruped Robots with High-Speed Trot Gait" Applied Sciences 9, no. 7: 1508. https://doi.org/10.3390/app9071508
APA StyleZeng, X., Zhang, S., Zhang, H., Li, X., Zhou, H., & Fu, Y. (2019). Leg Trajectory Planning for Quadruped Robots with High-Speed Trot Gait. Applied Sciences, 9(7), 1508. https://doi.org/10.3390/app9071508