Study on Low-Speed Stability of a Motorcycle


Abstract
1. Introduction
2. Experimental Motorcycle and Methodology
2.1. Motorcycle Details
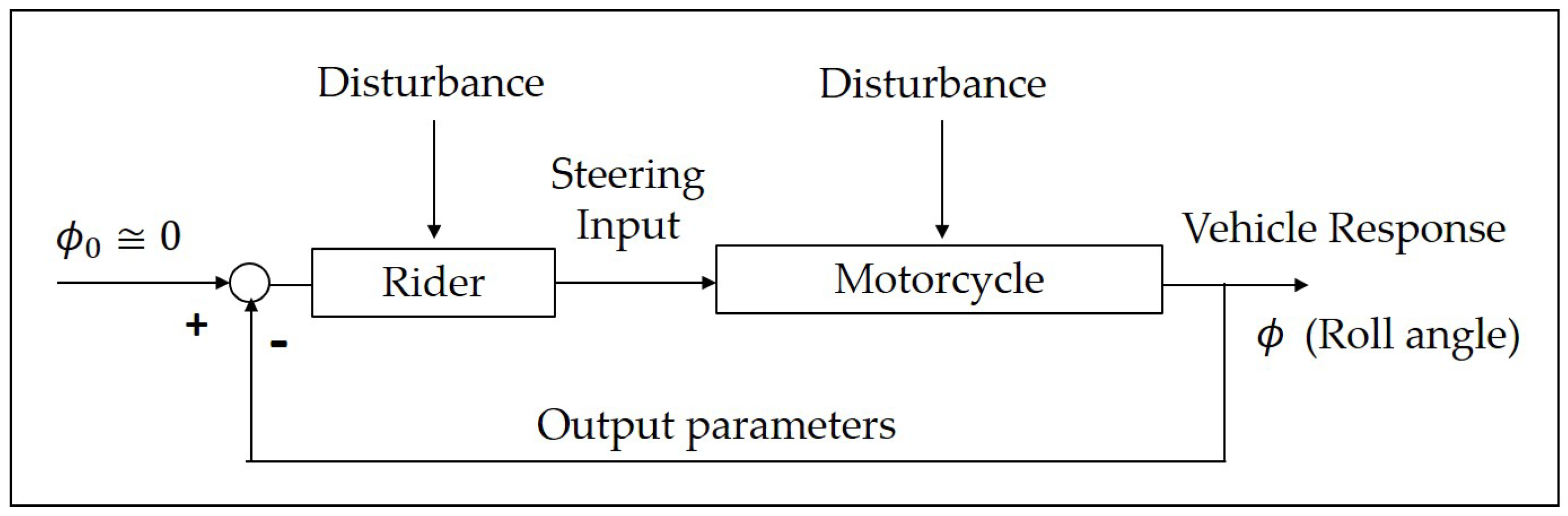
2.2. Methodology
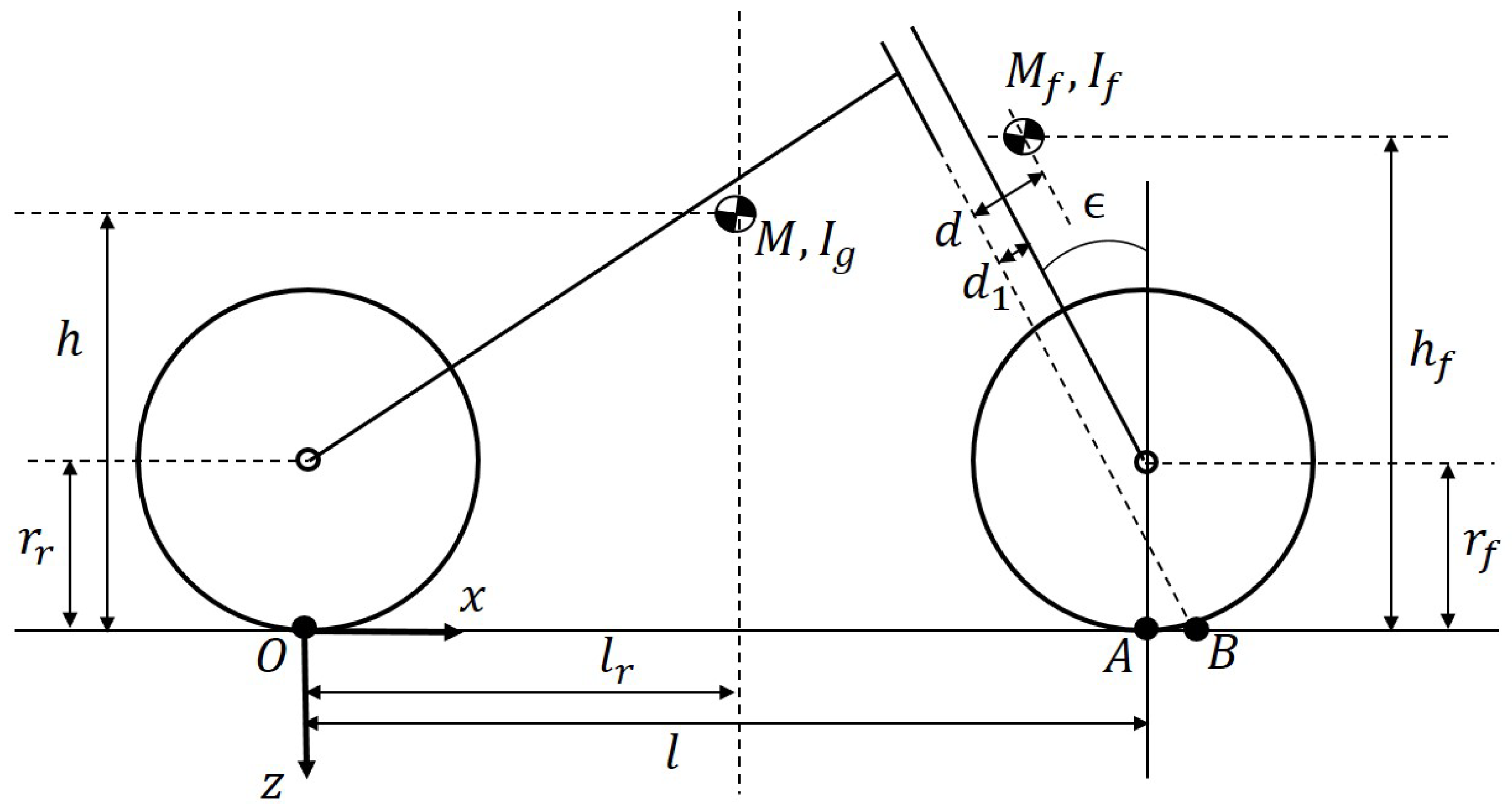
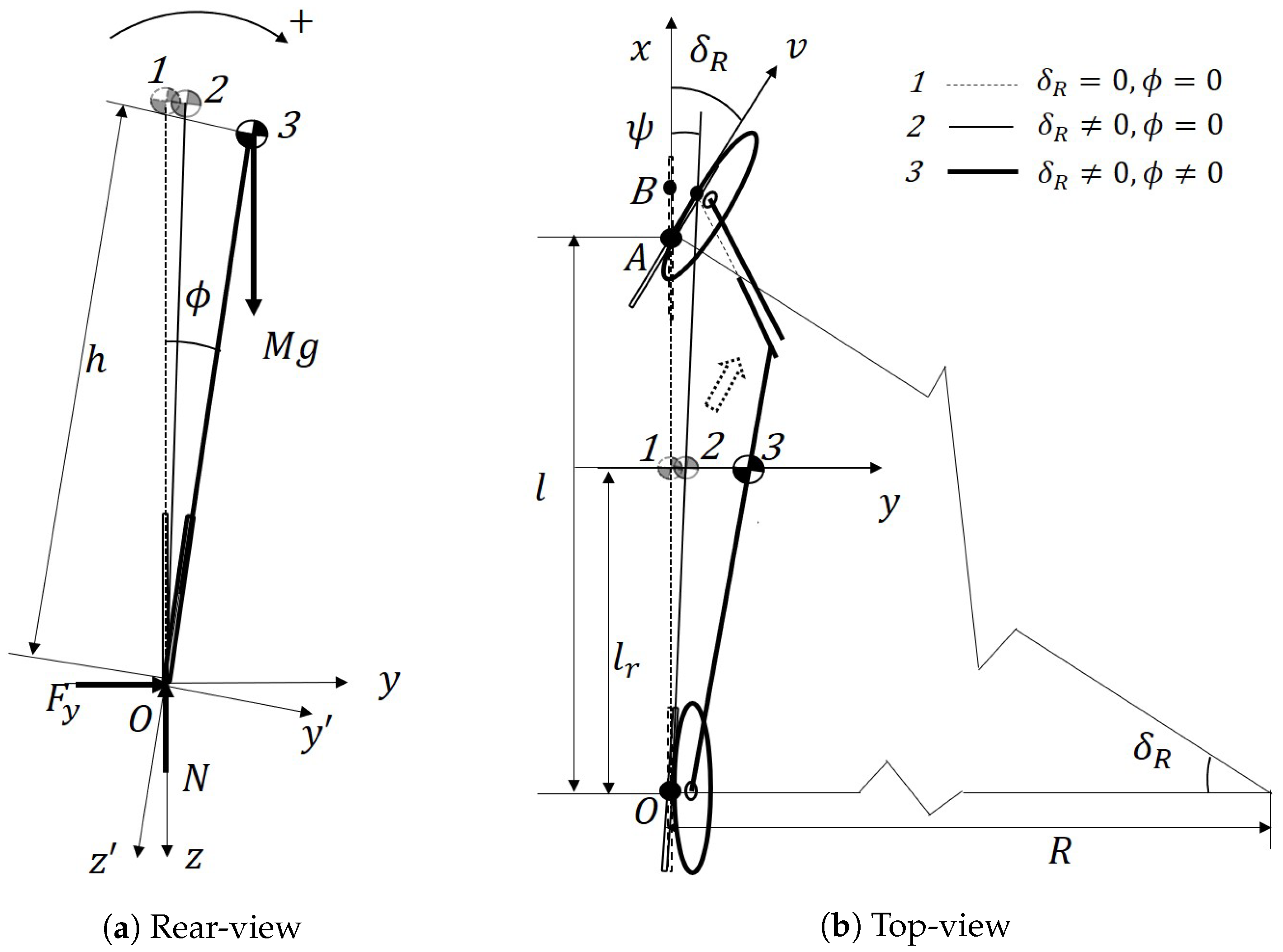
3. Linear Motorcycle Model
4. Experiment and Analysis
4.1. Experiments Details
4.2. Analysis of Experiments
4.2.1. Repeatability and Reliability of Experiments
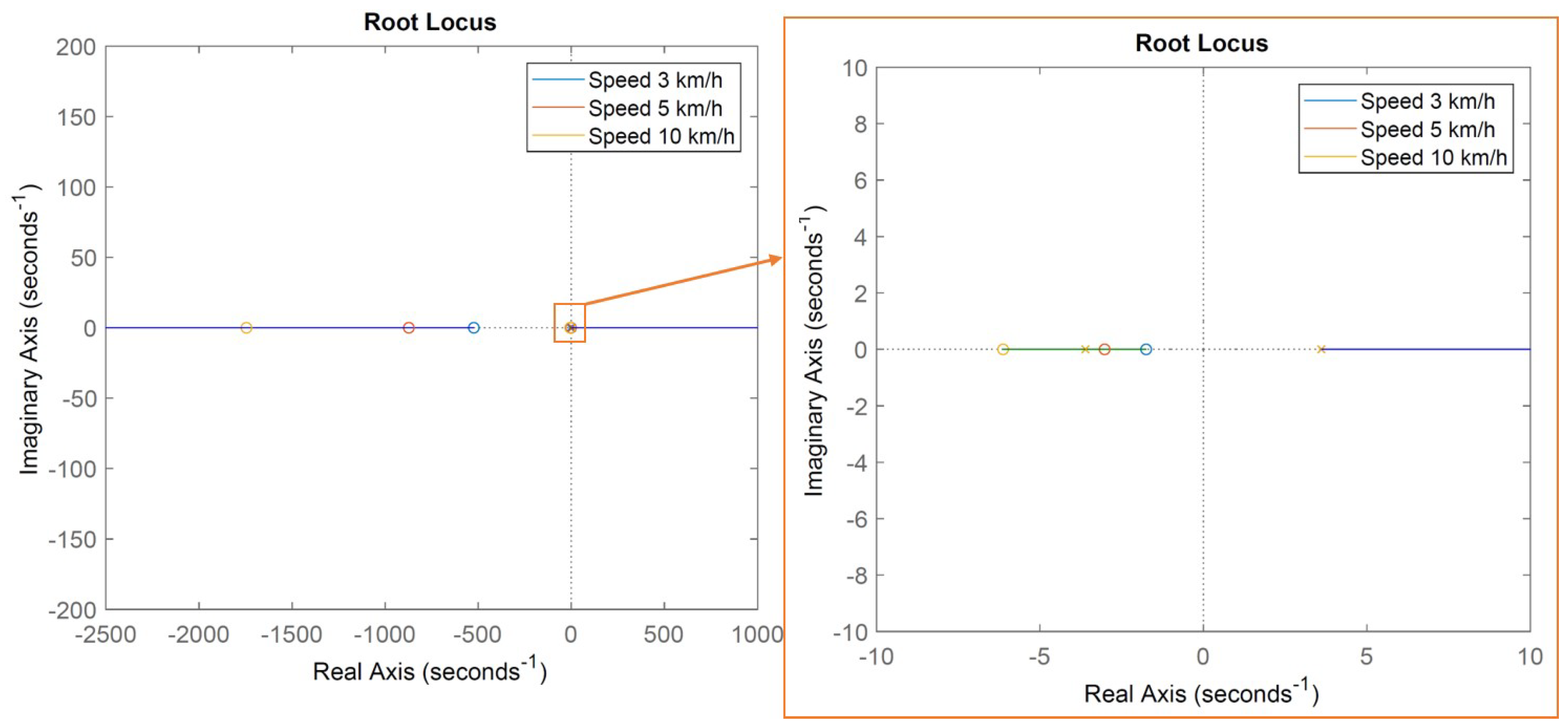
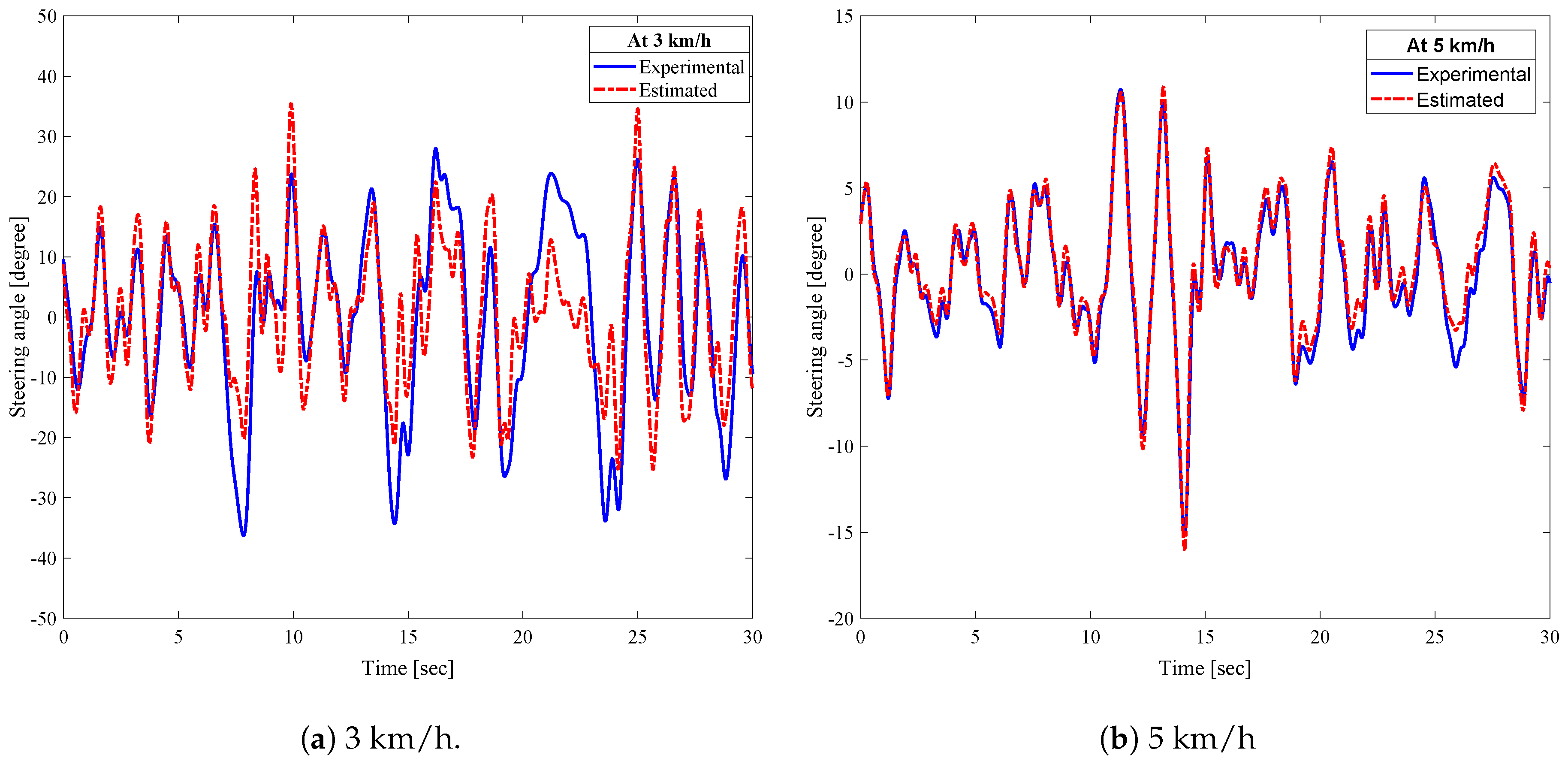
4.2.2. Validation of Theoretical Model
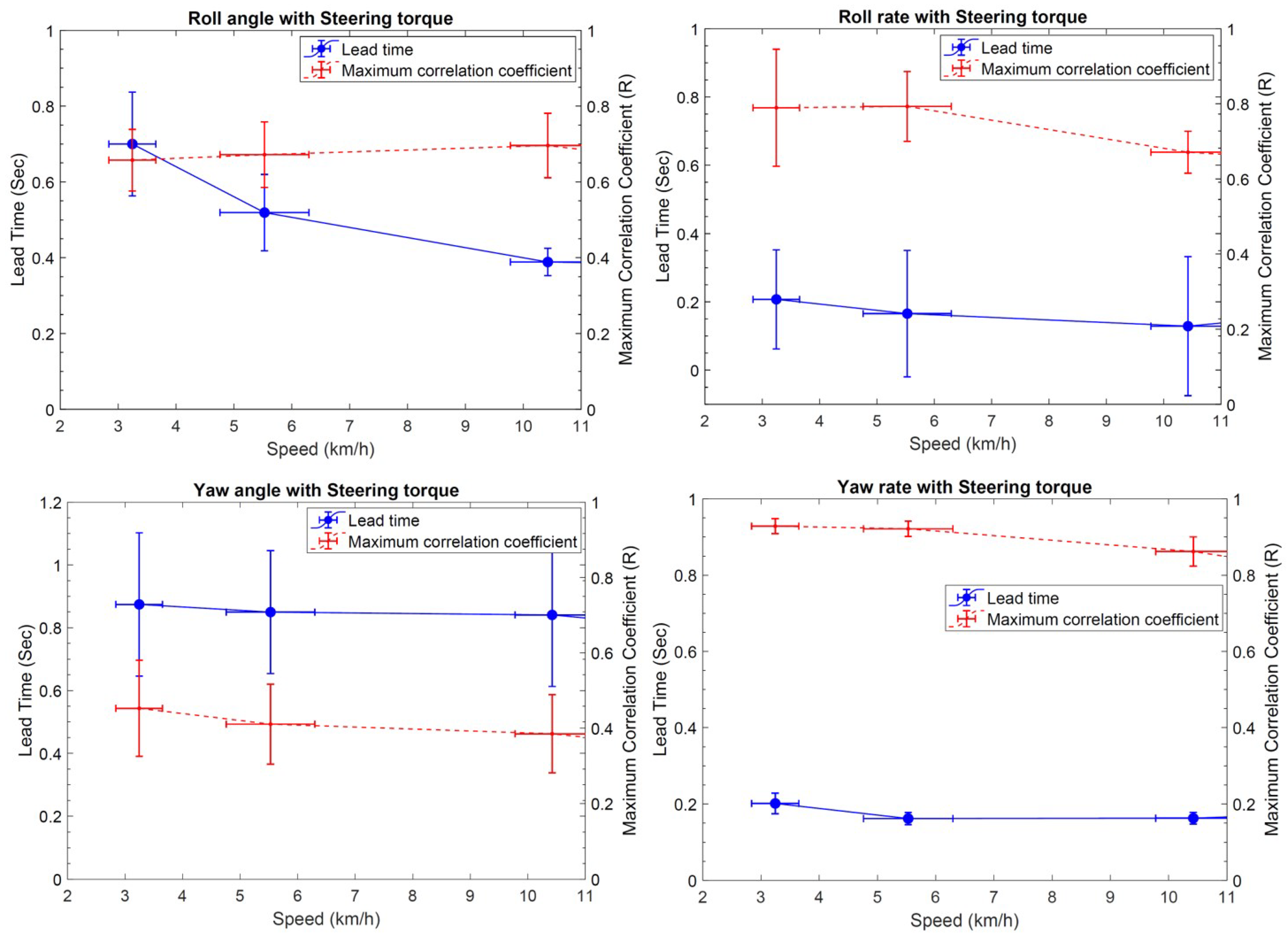
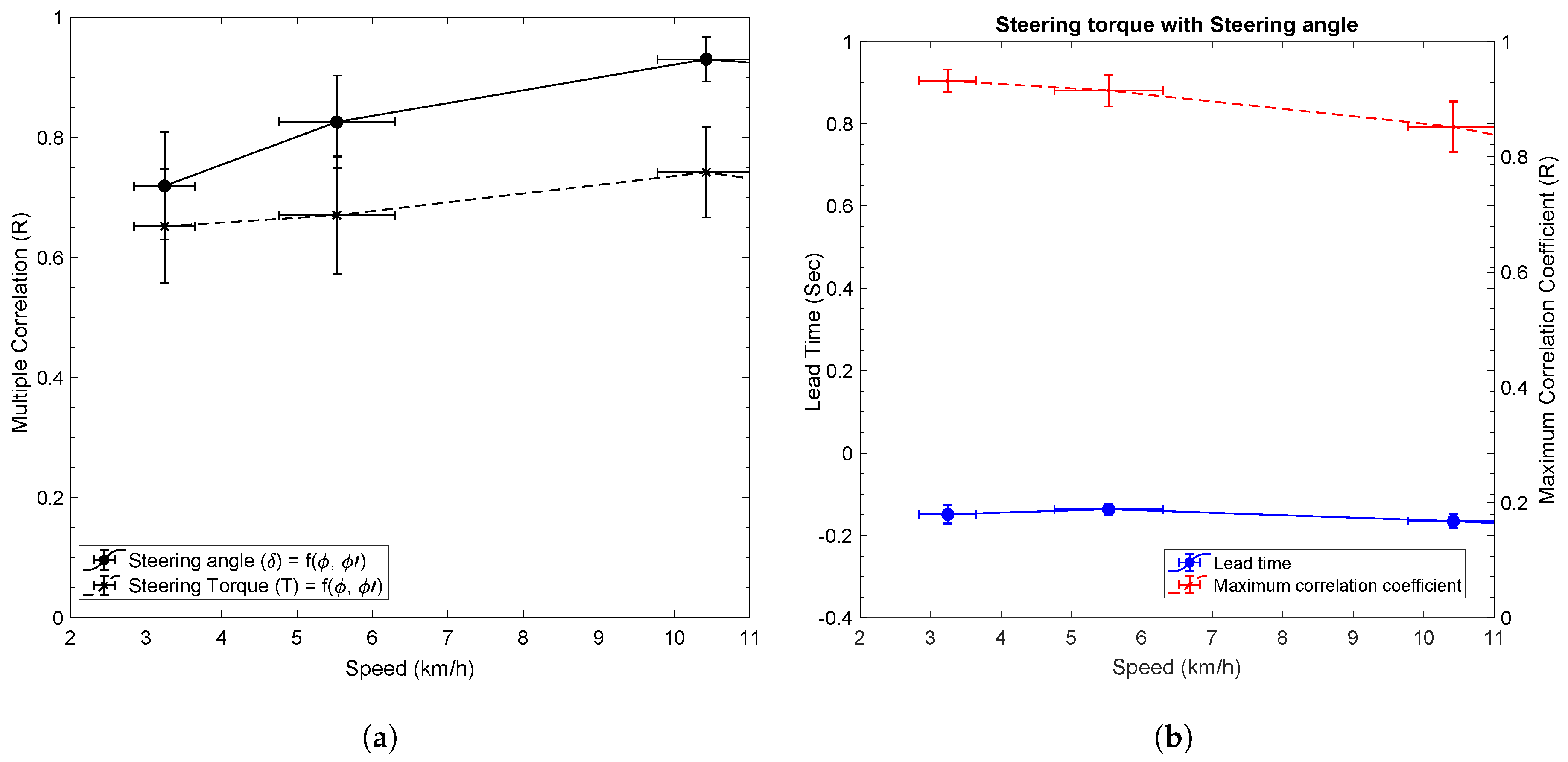
4.2.3. Correlation Analysis
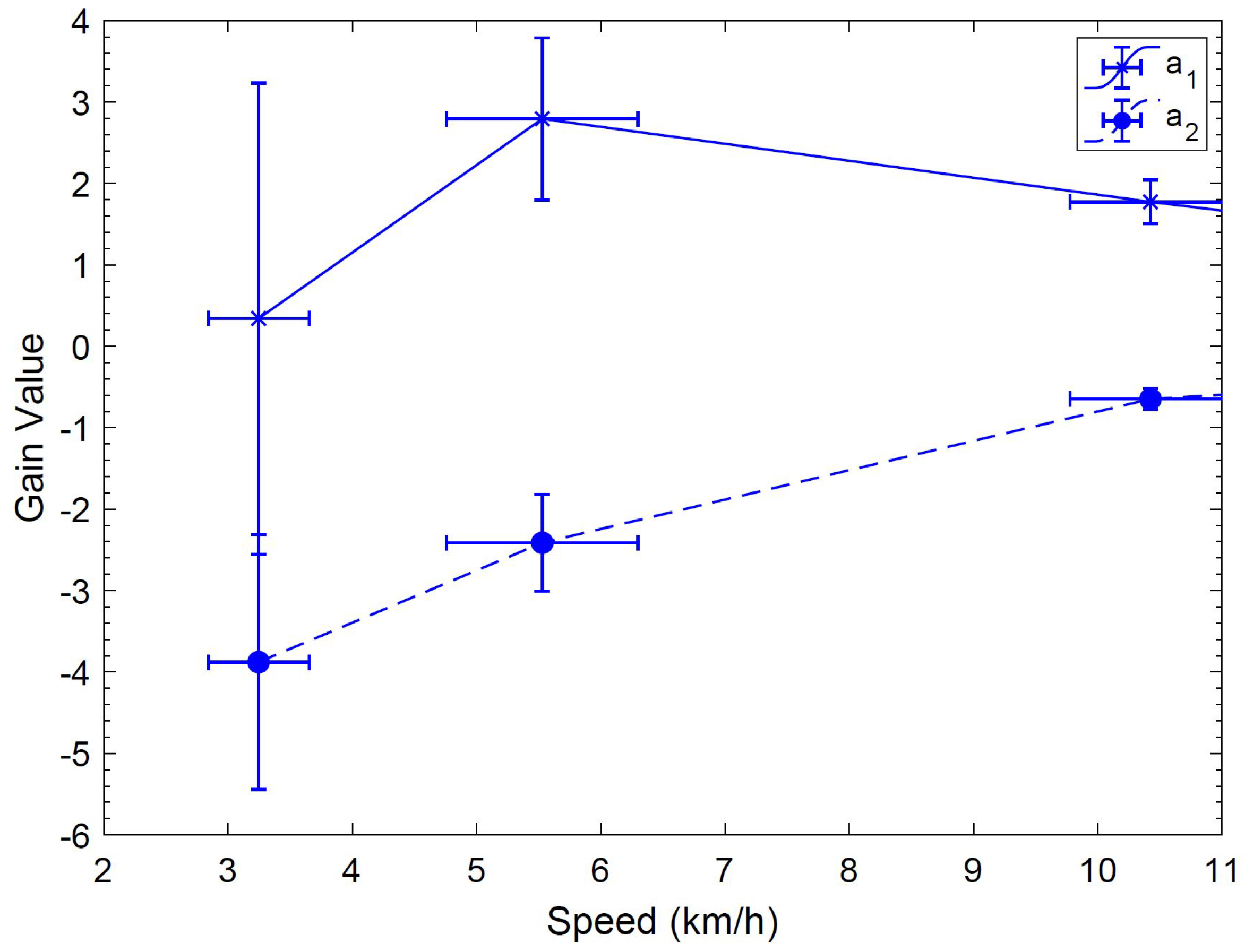
4.2.4. Output Parameter Evaluation
5. Conclusions
- The experimental results validate that the theoretical method of analysis can be used to find the regions of low-speed stability of a motorcycle.
- The roll angle and roll rate are important output parameters to be assessed to achieve low-speed stability.
- The steering angle is the appropriate input parameter over steering torque for low-speed stability because the regression correlation for the steering angle is significantly stronger than the steering torque, with the roll angle and the roll rate.
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| MCC | Maximum Correlation Coefficient |
| MRA | Multiple Regression Analysis |
| avg | Average |
| SD | Standard Deviation |
References
- Astrom, K.J.; Klein, R.E.; Lennartsson, A. Bicycle dynamics and control: Adapted bicycles for education and research. IEEE Control Syst. 2005, 25, 26–47. [Google Scholar] [CrossRef]
- Sharp, R.S. The stability and control of motorcycles. J. Mech. Eng. Sci. 2005, 13, 316–329. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, J.; Yi, J.; Song, D. Balance control and analysis of stationary riderless motorcycles. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 3018–3023. [Google Scholar] [CrossRef]
- Yokomori, M.; Higuchi, K.; Ooya, T. Rider’s Operation of a Motorcycle Running Straight at Low Speed. JSME Int. J. 1992, 35, 553–559. [Google Scholar] [CrossRef][Green Version]
- Kooijman, J.D.G.; Meijaard, J.P.; Papadopoulos, J.M.; Ruina, A.; Schwab, A.L. A Bicycle Can Be Self-Stable Without Gyroscopic or Caster Effects. Sci. Mag. 2005, 332, 339–342. [Google Scholar] [CrossRef] [PubMed]
- Jones, D.E.H. The stability of the bicycle. Phys. Today 1970, 23, 34–40. [Google Scholar] [CrossRef]
- Cossalter, V. Motorcycle Dynamics, 2nd ed.; Lulu.com: Morrisville, NC, USA, 2007. [Google Scholar]
- Miyagishi, S.; Kageyama, I.; Takama, K.; Baba, M.; Uchiyama, H. Study on construction of a rider robot for two-wheeled vehicle. JSAE Rev. 2003, 24, 321–326. [Google Scholar] [CrossRef]
- Takenouchi, S.; Sekine, T.; Okano, M. Study on condition of stability of motorcycle at low speed. In Proceedings of the Small Engine Technology Conference & Exposition, Kyoto, Japan, 29–31 October 2002; No. 2002-32-1797. SAE Technical Paper: Warrendale, PA, USA, 2002. [Google Scholar]
- Schlipsing, M.; Salmen, J.; Lattke, B.; Schröter, K.G.; Winner, H. Roll angle estimation for motorcycles: Comparing video and inertial sensor approaches. In Proceedings of the IEEE Intelligent Vehicles Symposium, Alcala de Henares, Spain, 3–7 June 2012; pp. 500–505. [Google Scholar] [CrossRef]
- Schwab, A.L.; Kooijman, J.D.G.; Meijaard, J.P. Some recent developments in bicycle dynamics and control. In Proceedings of the Fourth European Conference on Structural Control (4ECSC), St. Petersburg, Russia, 8–12 September 2008. [Google Scholar]
- Zhang, Y.; Yi, J. Dynamic modeling and balance control of human/bicycle systems. In Proceedings of the 2010 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Montreal, QC, Canada, 6–9 July 2010; pp. 1385–1390. [Google Scholar] [CrossRef]
- Kimura, T.; Ando, Y.; Tsujii, E. Development of new concept two-wheel steering system for motorcycles. SAE Int. J. Passeng. Cars Electron. Electr. Syst. 2014, 7, 36–40. [Google Scholar] [CrossRef]
- Beznos, A.V.; Formal’sky, A.M.; Gurfinkel, E.V.; Jicharev, D.N.; Lensky, A.V.; Savitsky, K.V.; Tchesalin, L.S. Control of autonomous motion of two-wheel bicycle with gyroscopic stabilisation. In Proceedings of the 1998 IEEE International Conference on Robotics and Automation, Leuven, Belgium, 16–20 May 1988; Volume 3, pp. 2670–2675. [Google Scholar] [CrossRef]
- Lot, R.; Fleming, J. Gyroscopic stabilisers for powered two-wheeled vehicles. Veh. Syst. Dyn. 2018. [Google Scholar] [CrossRef]
- Karnopp, D. Tilt control for gyro-stabilized two-wheeled vehicles. Veh. Syst. Dyn. 2002, 37, 145–156. [Google Scholar] [CrossRef]
- Yang, C.; Murakami, T. Full-speed range self-balancing electric motorcycles without the handlebar. IEEE Trans. Ind. Electron. 2016, 63, 1911–1922. [Google Scholar] [CrossRef]
- Huang, C.; Tung, Y.; Yeh, T. Balancing control of a robot bicycle with uncertain center of gravity. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 5858–5863. [Google Scholar] [CrossRef]
- Vatanashevanopakorn, S.; Parnichkun, M. Steering control based balancing of a bicycle robot. In Proceedings of the 2011 IEEE International Conference on Robotics and Biomimetics, Karon Beach, Phuket, Thailand, 7–11 December 2011; pp. 2169–2174. [Google Scholar] [CrossRef]
- Keo, L.; Yoshino, K.; Kawaguchi, M.; Yamakita, M. Experimental results for stabilizing of a bicycle with a flywheel balancer. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 6150–6155. [Google Scholar] [CrossRef]
- Tanaka, Y.; Murakami, T. Self sustaining bicycle robot with steering controller. In Proceedings of the AMC ‘04 8th IEEE International Workshop on Advanced Motion Control, Kawasaki, Japan, 25–28 March 2004; pp. 193–197. [Google Scholar] [CrossRef]
- Sharp, R.S.; Watanabe, Y. Chatter vibrations of high-performance motorcycles. Veh. Syst. Dyn. 2013, 51, 393–404. [Google Scholar] [CrossRef]
- Massaro, M.; Lot, R.; Cossalter, V.; Brendelson, J.; Sadauckas, J. Numerical and experimental investigation of passive rider effects on motorcycle weave. Veh. Syst. Dyn. 2012, 50 (Suppl. 1), 215–227. [Google Scholar] [CrossRef]
- Sakai, H. Theoretical and Fundamental Consideration to Accord Between Self-Steer Speed and Rolling in Maneuverability of Motorcycles; No. 2018-32-0049; SAE Technical Paper: Warrendale, PA, USA, 2018. [Google Scholar] [CrossRef]
- Karanam, V.M. Studies in the Dynamics of Two and Three Wheeled Vehicles. Ph.D. Thesis, Indian Institute of Science, Bangalore, India, 2012. [Google Scholar]
- Popov, A.A.; Rowell, S.; Meijaard, J.P. A review on motorcycle and rider modelling for steering control. Veh. Syst. Dyn. 2010, 48, 775–792. [Google Scholar] [CrossRef]
- Data Logger. Available online: http://www.racelogic.co.uk/_downloads/vbox/Datasheets/Data_Loggers/RLVB3i_Data.pdf (accessed on 27 April 2019).














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Symbols | Values | Unit |
|---|---|---|---|
| Total mass | M | 165.70 | kg |
| Wheelbase | l | 1.236 | m |
| Roll inertia at centre of gravity | 18.79 | ||
| Height of centre of gravity from ground | h | 0.545 | m |
| Horizontal distance of centre of gravity from rear axle | 0.450 | m | |
| Caster angle | 25.8 | degree | |
| Fork offset | 0.004 | m | |
| Front steering system mass | 17.72 | kg | |
| Height of front steering system centre of gravity from ground | 0.540 | m | |
| Shortest distance between steering system centre of gravity and steering axis | d | 0.005 | m |
| Front wheel rolling radius | 0.214 | m | |
| Front wheel spin inertia | 0.122 | ||
| Rear wheel rolling radius | 0.205 | m | |
| Rear wheel spin inertia | 0.112 | ||
| Acceleration of gravity | g | 9.81 |
| Parameters | Symbols |
|---|---|
| Roll angle | |
| Steering angle | |
| Kinematic steering angle | |
| Yaw angle | |
| Lateral displacement at O | |
| Speed | v |
| Instantaneous turning circle radius | R |
| Target Speed | 3 km/h | 5 km/h | 10 km/h | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Speed | RA Gain | Speed | RA Gain | Speed | RA Gain | ||||||||
| Rider | Set | avg | SD | avg | SD | avg | SD | avg | SD | avg | SD | avg | SD |
| 1 | 1 | 2.46 | 0.32 | 14.49 | 4.26 | 5.54 | 0.44 | 6.21 | 1.34 | 10.16 | 0.34 | 2.59 | 0.67 |
| 1 | 2 | 2.56 | 0.48 | 14.18 | 4.20 | 5.49 | 0.63 | 6.55 | 1.72 | 10.32 | 0.35 | 2.42 | 0.66 |
| 2 | 1 | 3.12 | 0.34 | 16.31 | 4.11 | 5.69 | 0.71 | 7.00 | 1.73 | 10.62 | 0.52 | 2.22 | 0.50 |
| 2 | 2 | 2.95 | 0.40 | 17.42 | 5.31 | 5.81 | 0.36 | 7.52 | 1.44 | 10.48 | 0.40 | 2.63 | 0.54 |
| 3 | 1 | 3.12 | 0.46 | 9.20 | 3.92 | 5.27 | 0.79 | 6.46 | 1.58 | 11.07 | 0.59 | 1.88 | 0.66 |
| 3 | 2 | 3.02 | 0.38 | 10.78 | 4.02 | 5.60 | 0.57 | 5.22 | 1.10 | 10.36 | 0.35 | 2.22 | 0.51 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Singhania, S.; Kageyama, I.; Karanam, V.M. Study on Low-Speed Stability of a Motorcycle. Appl. Sci. 2019, 9, 2278. https://doi.org/10.3390/app9112278
Singhania S, Kageyama I, Karanam VM. Study on Low-Speed Stability of a Motorcycle. Applied Sciences. 2019; 9(11):2278. https://doi.org/10.3390/app9112278
Chicago/Turabian StyleSinghania, Sharad, Ichiro Kageyama, and Venkata M Karanam. 2019. "Study on Low-Speed Stability of a Motorcycle" Applied Sciences 9, no. 11: 2278. https://doi.org/10.3390/app9112278
APA StyleSinghania, S., Kageyama, I., & Karanam, V. M. (2019). Study on Low-Speed Stability of a Motorcycle. Applied Sciences, 9(11), 2278. https://doi.org/10.3390/app9112278