Detection and Tracking of Moving Pedestrians with a Small Unmanned Aerial Vehicle



Abstract
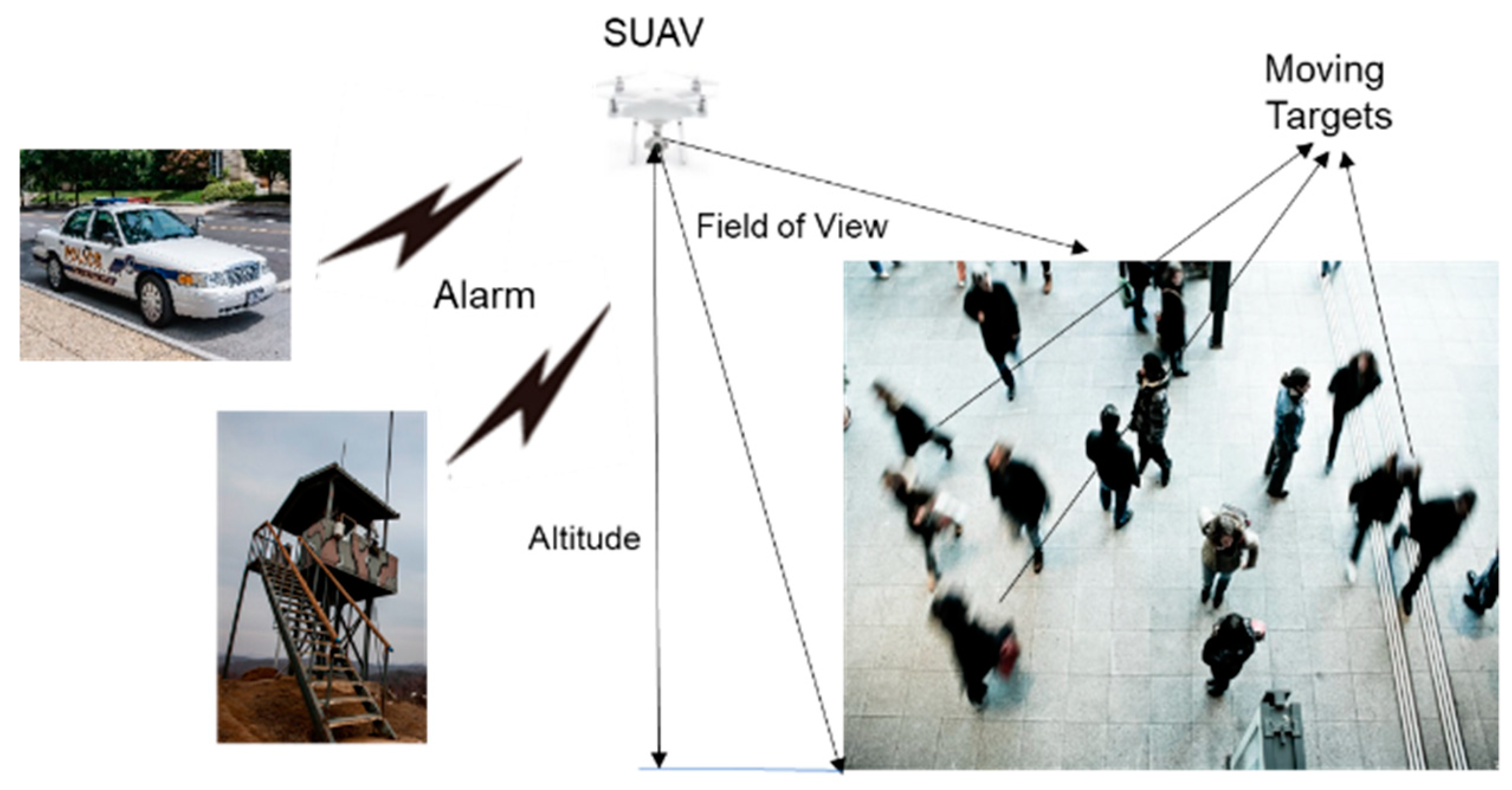
1. Introduction
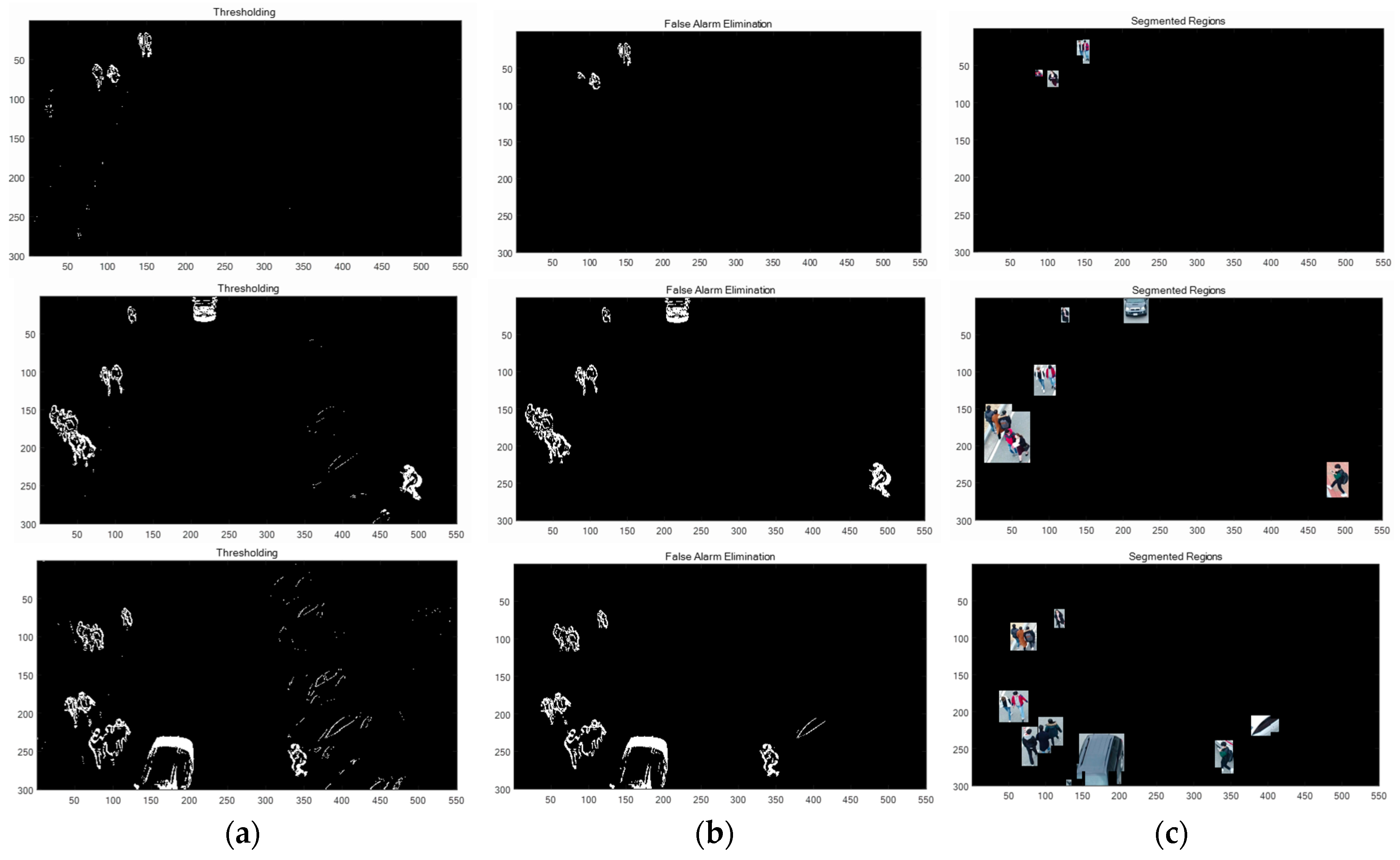
2. Object Detection with Frame Subtraction
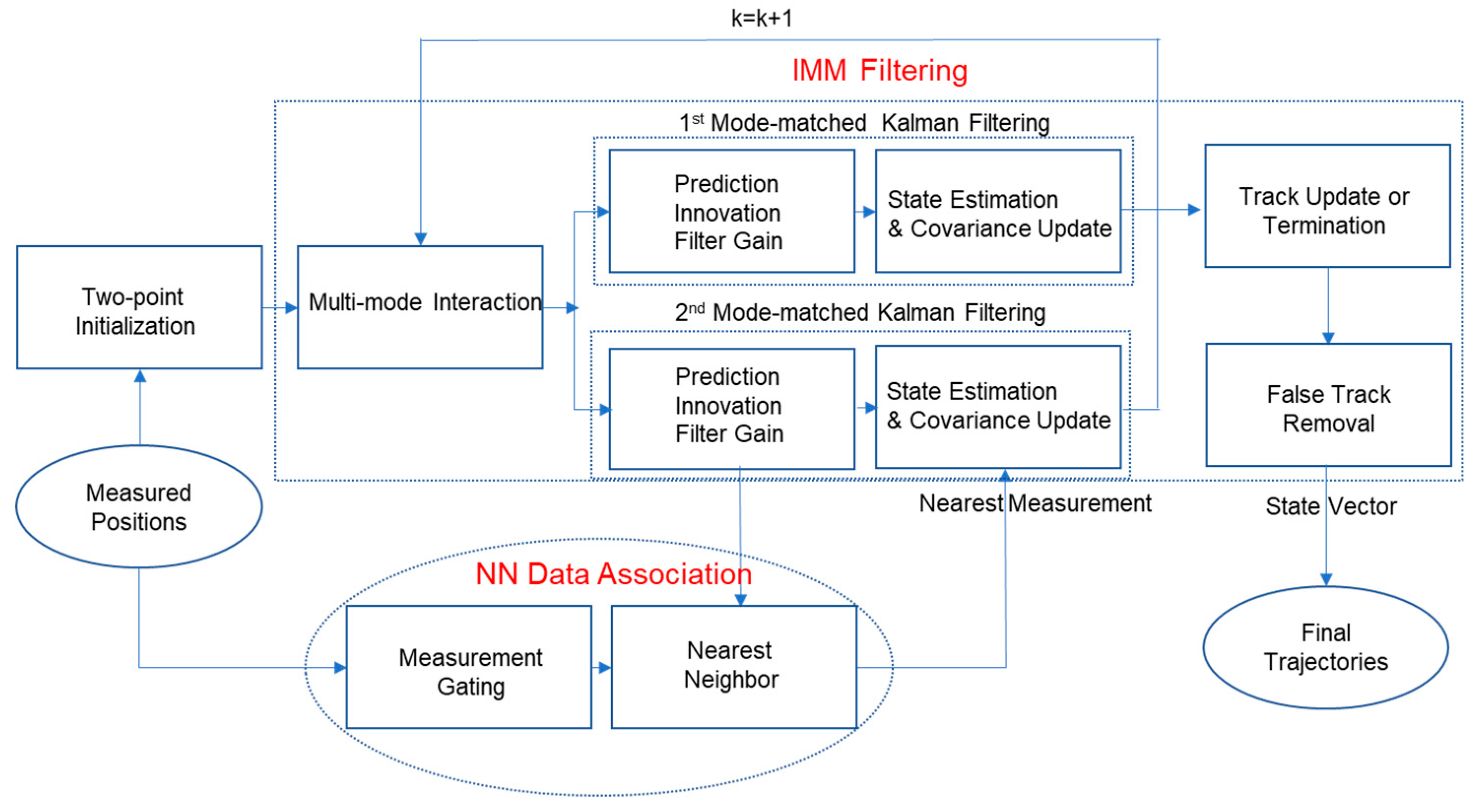
3. Target Tracking with IMM Filtering
3.1. System Modeling
3.2. Multi-Mode Interaction
3.3. Mode Matched Kalman Filtering
3.4. Measurement Gating and Data Association
3.5. State Estimate and Covariance Update
3.6. Performance Evaluation
4. Results
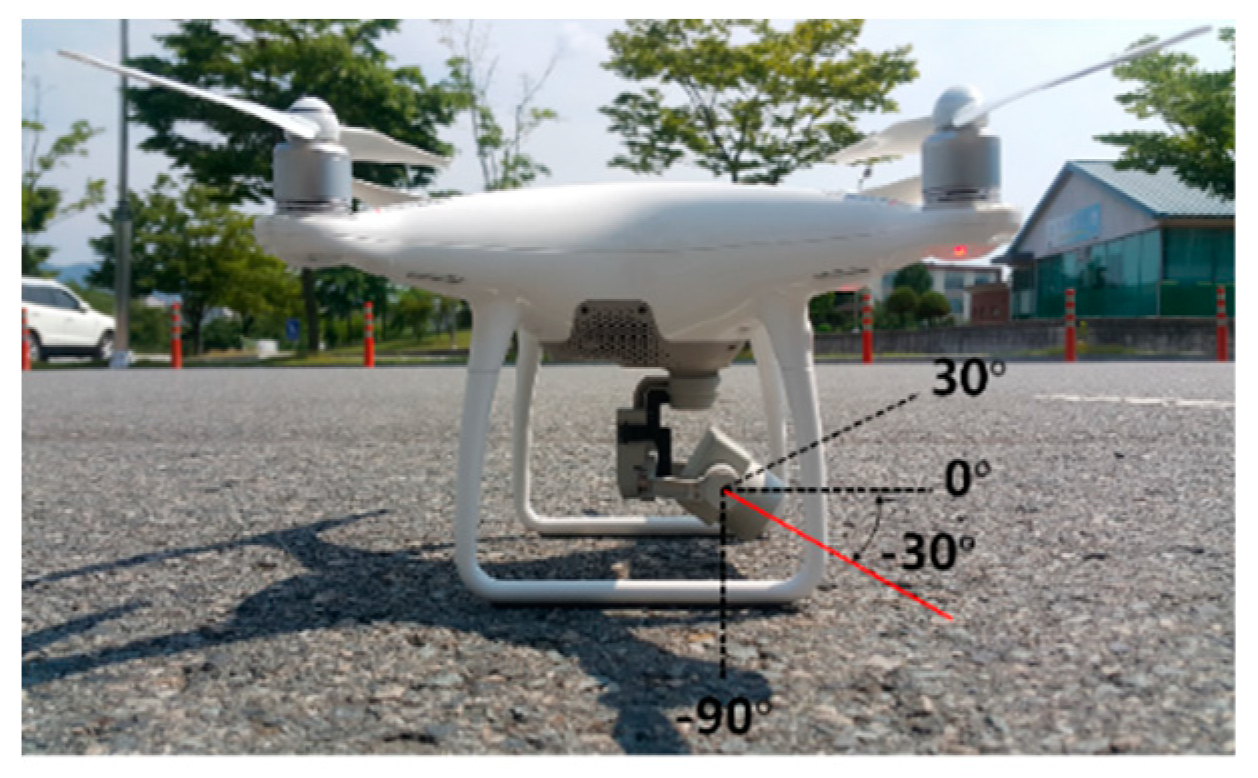
4.1. Experimental Set-Up
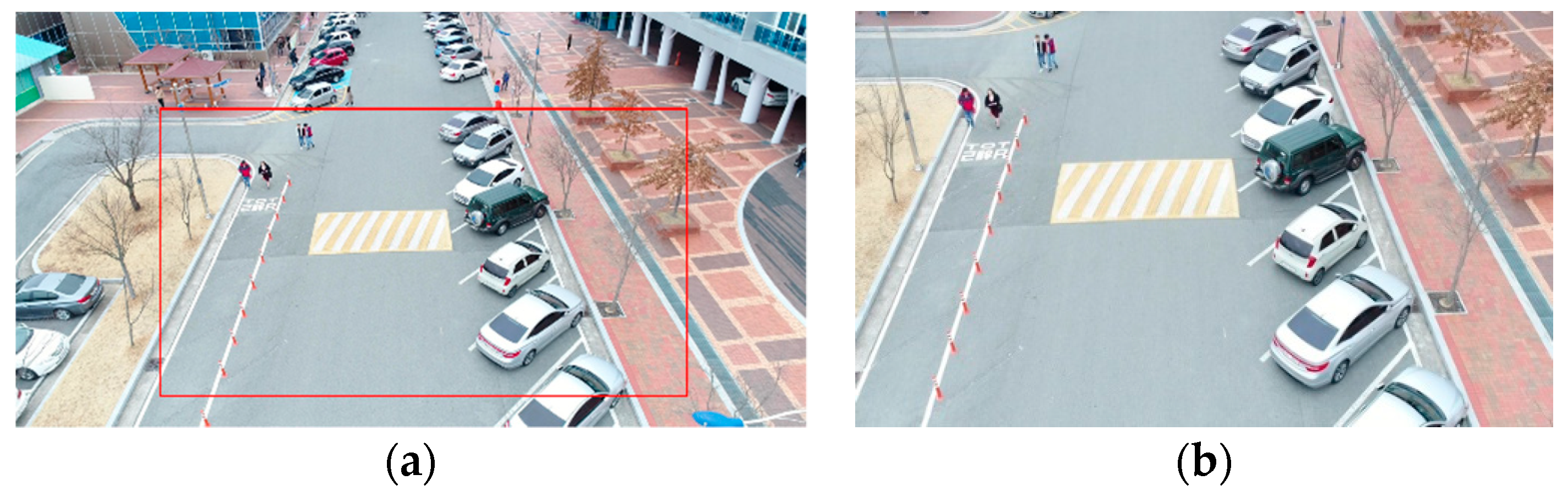
4.2. Scenario Description
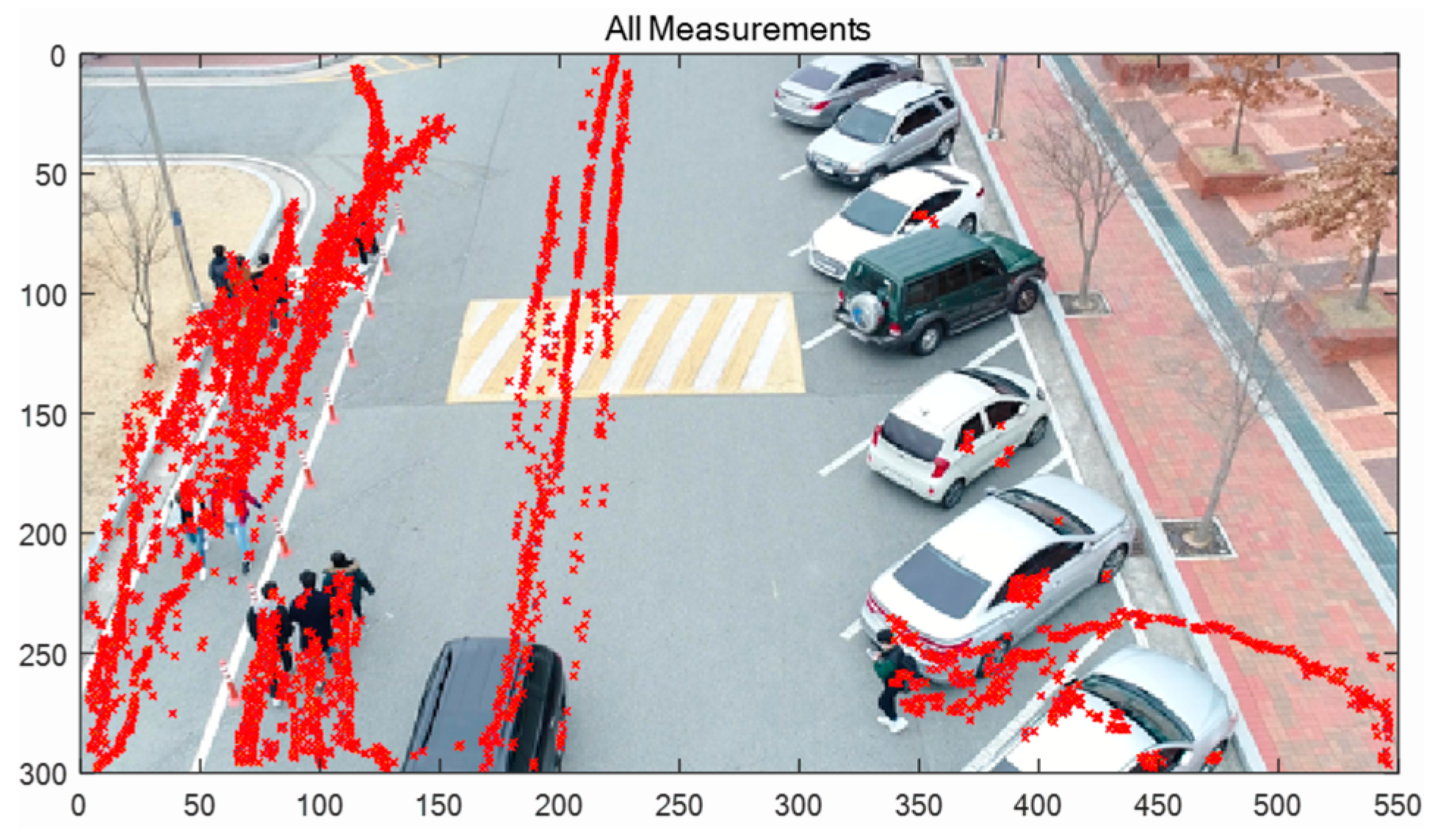
4.3. Detection of Moving Objects
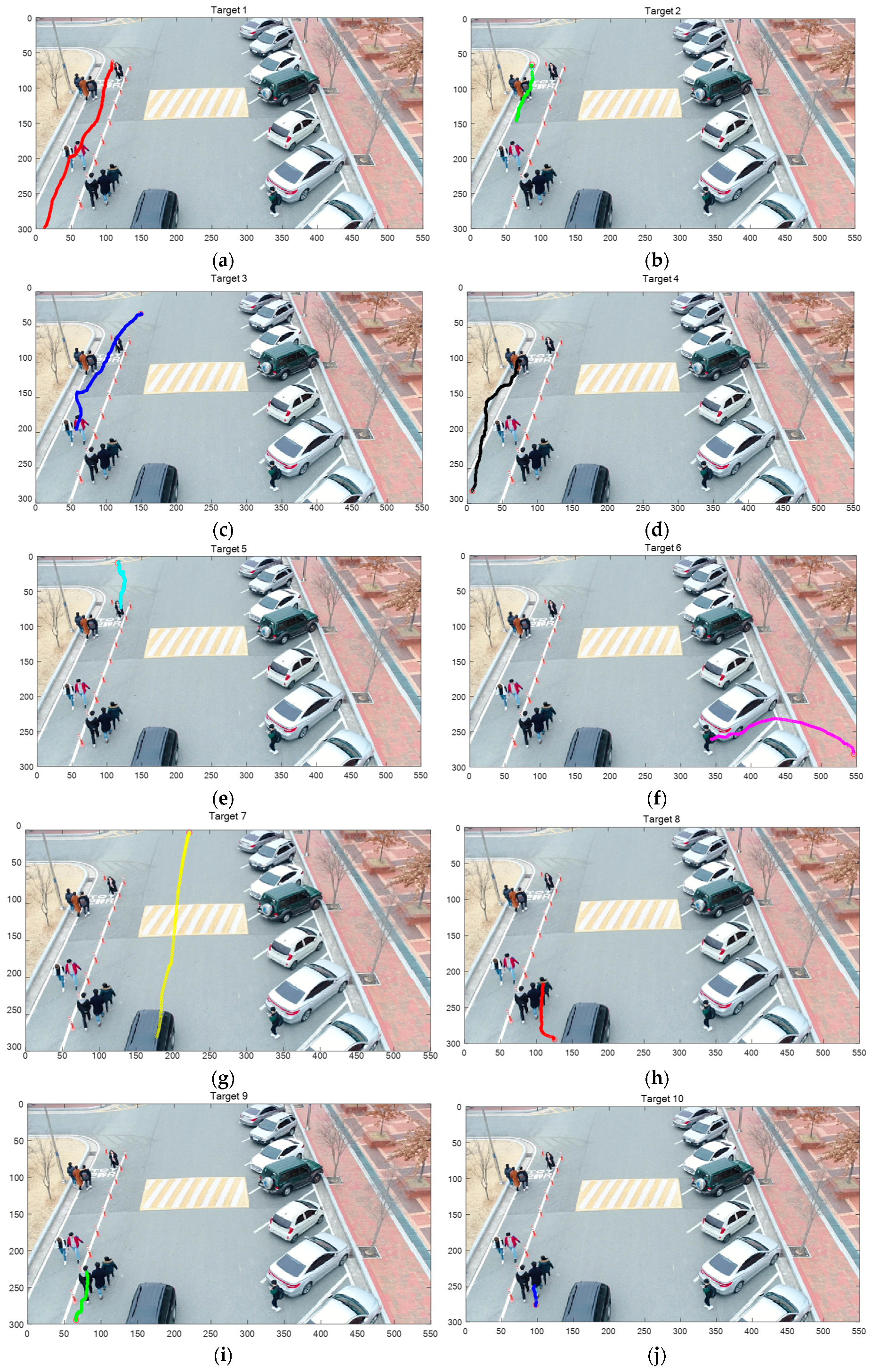
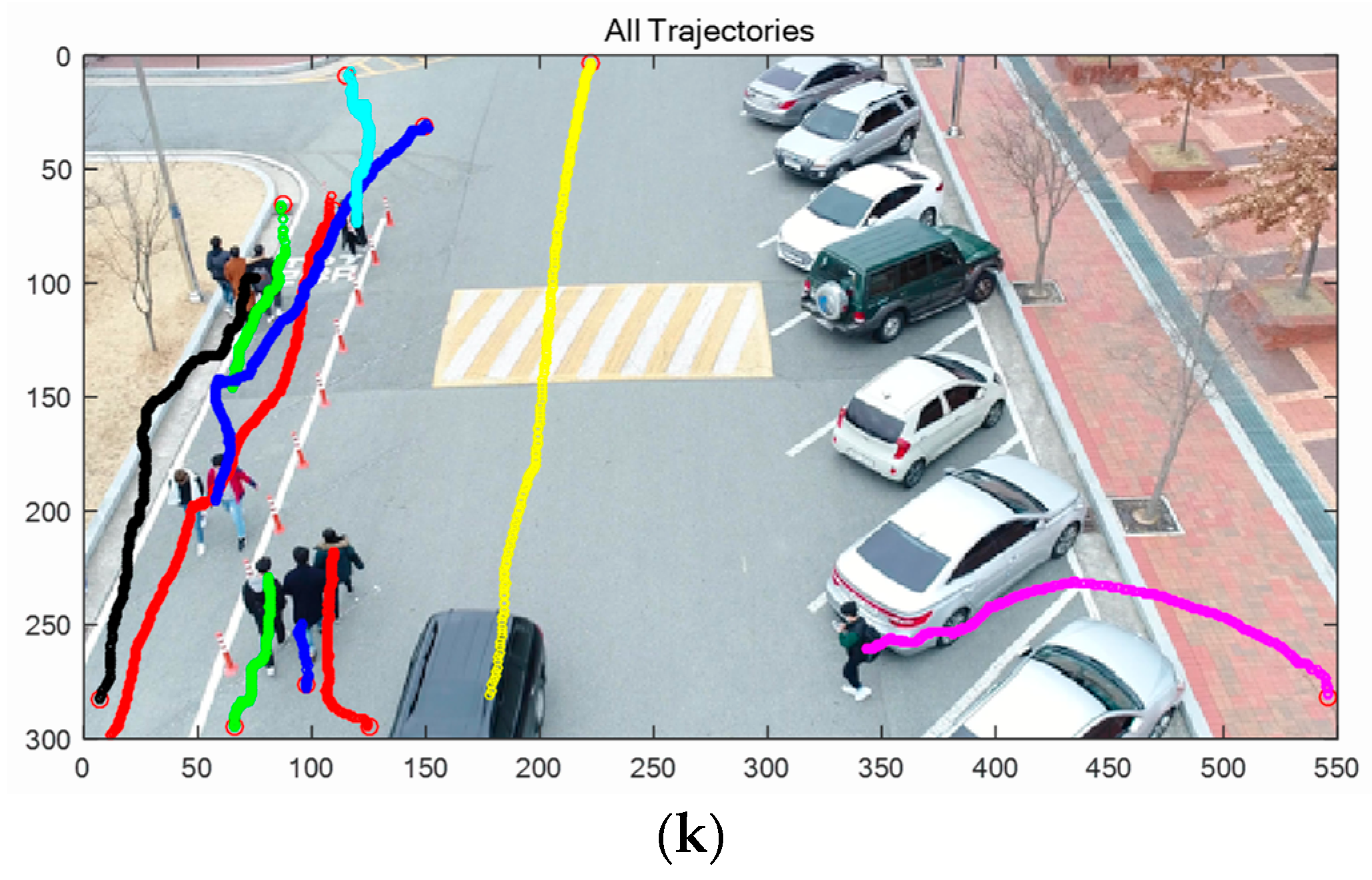
4.4. Multiple Target Tracking
5. Discussion
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- 2015 FAA Operation and Certification of Small Unmanned Aircraft Systems. Available online: https://www.faa.gov/regulations_policies/rulemaking/recently_published/media/2120-AJ60_NPRM_2-15-2015_joint_signature.pdf (accessed on 12 August 2019).
- Kumar, R.; Sawhney, H.; Samarasekera, S.; Hsu, S.; Tao, H.; Guo, Y.L.; Hanna, K.; Pope, A.; Wildes, R.; Hirvonen, D.; et al. Aerial video surveillance and exploitation. Proc. IEEE 2001, 89, 1518–1539. [Google Scholar] [CrossRef]
- Wu, Y.; He, X.; Nguyen, T.Q. Moving object detection with a freely moving camera via background motion subtraction. IEEE Trans. Circ. Syst. Video Technol. 2017, 27, 236–248. [Google Scholar] [CrossRef]
- Zhang, Y.; Huang, X.; Li, J.; Liu, X.; Zhang, H.; Xing, X. Research of moving object detection algorithm in transmission lines under complex background. In Proceedings of the International Conference on Condition Monitoring and Diagnosis, Xi’an, China, 25–28 October 2016; Volume 30, pp. 176–179. [Google Scholar]
- Olugboja, A.; Wang, Z. Detection of moving objects using foreground detector and improved morphological filter. In Proceedings of the 2016 3rd International Conference on Information Science and Control Engineering, Vienna International Hotels, Beijing, China, 8–10 July 2016. [Google Scholar]
- Yeom, S.; Lee, M.H.; Cho, I.J. Long-range moving object detection based on background subtraction. In Proceedings of the 18th International Symposium on Advanced Intelligent Systems, Daegu, South Korea, 11–14 October 2017; pp. 1082–1085. [Google Scholar]
- Smeulders, A.W.M.; Chu, D.M.; Cucchiara, R.; Calderara, S.; Dehghan, A.; Shah, M. Visual tracking: An experimental survey. IEEE Trans. Pattern Anal. Mach. Intell. 2014, 36, 1442–1468. [Google Scholar]
- Park, S.M.; Park, J.; Kim, H.B.; Sim, K.B. Specified object tracking problem in an environment of multiple moving objects. Int. J. Fuzzy Log. Intell. Syst. 2011, 11, 118–123. [Google Scholar] [CrossRef]
- Feng, X.; Mei, W.; Hu, D. A review of visual tracking with deep learning. Adv. Intell. Syst. Res. 2016, 133, 231–234. [Google Scholar]
- Yun, S.; Choi, J.; Yoo, Y.; Yun, K.; Choi, J.Y. Action-decision networks for visual tracking with deep reinforcement learning. In Proceedings of the IEEE Conference on CVPR2017, Honolulu, HI, USA, 21–26 July 2017; pp. 2711–2720. [Google Scholar]
- Li, P.; Wang, D.; Wang, L.; Lu, H. Deep visual tracking: Review and experimental comparison. Pattern Recognit. 2018, 76, 323–338. [Google Scholar] [CrossRef]
- Chen, P.; Dang, Y.; Liang, R.; Zhu, W.; He, X. Real-time object tracking on a drone with multi-inertial sensing data. IEEE Trans. Intell. Trans. Syst. 2018, 19, 131–139. [Google Scholar] [CrossRef]
- Bian, C.; Yang, Z.; Zhang, T.; Xiong, H. Pedestrian tracking from an unmanned aerial vehicle. In Proceedings of the 2016 IEEE 13th International Conference on Signal Processing (ICSP), Chengdu, China, 6–10 November 2016; pp. 1067–1071. [Google Scholar]
- Risse, B.; Mangan, M.; del Pero, L.; Webb, B. Visual tracking of small animals in cluttered natural environments using a freely moving camera. In Proceedings of the 2017 IEEE International Conference on Computer Vision Workshops, Venice, Italy, 22–29 October 2017; pp. 2840–2849. [Google Scholar]
- Kim, J.; Kim, Y. Moving ground target tracking in dense obstacle areas using UAVs. IFAC Proc. Vol. 2008, 41, 8552–8557. [Google Scholar] [CrossRef]
- Yeom, S.; Kirubarajan, T.; Bar-Shalom, Y. Track segment association, fine-step IMM and initialization with Doppler for improved track performance. IEEE Trans. Aerosp. Electron. Syst. 2004, 40, 293–309. [Google Scholar] [CrossRef]
- Stone, L.D.; Streit, R.L.; Corwin, T.L.; Bell, K.L. Bayesian Multiple Target Tracking, 2nd ed.; Artech House: Boston, MA, USA, 2014. [Google Scholar]
- Blom, H.A.P.; Bar-shalom, Y. The interacting multiple model algorithm for systems with Markovian switching coefficients. IEEE Trans. Autom. Control 1988, 33, 780–783. [Google Scholar] [CrossRef]
- Zhou, H.; Zhao, H.; Huang, H.; Zhao, X. A Cubature-principle-assisted IMM-adaptive UKF algorithm for maneuvering target tracking caused by sensor faults. Appl. Sci. 2017, 7, 3. [Google Scholar] [CrossRef]
- Li, T.; Su, J.; Liu, W.; Corchado, J.M. Approximate Gaussian conjugacy: Parametric recursive filtering under nonlinearity, multimodality, uncertainty, and constraint, and beyond. Front. Inform. Technol. Electron. Eng. 2017, 18, 1913–1939. [Google Scholar] [CrossRef]
- Bar-Shalom, Y.; Li, X.R. Multitarget-Multisensor Tracking: Principles and Techniques; YBS Publishing: Storrs, CT, USA, 1995. [Google Scholar]
- Reid, D.B. An algorithm for tracking multiple targets. IEEE Trans. Autom. Control 1979, 24, 843–854. [Google Scholar] [CrossRef]
- Deb, S.; Yeddanapudi, M.; Pattipati, K.R.; Bar-Shalom, Y. A generalized S-D assignment algorithm formultisensor-multitarget state estimation. IEEE Trans. Aerosp. Electron. Syst. 1997, 33, 523–538. [Google Scholar]
- Lee, M.H.; Yeom, S. Detection and tracking of multiple moving vehicles with a UAV. Int. J. Fuzzy Log. Intell. Syst. 2018, 18, 182–189. [Google Scholar] [CrossRef]
- Lee, M.H.; Yeom, S. Multiple target detection and tracking on urban roads with a drone. J. Intell. Fuzzy Syst. 2018, 35, 6071–6078. [Google Scholar] [CrossRef]
- Gonzalez, R.C.; Woods, R.E. Digital Image Processing, 4th ed.; Pearson: New York, NY, USA, 2017. [Google Scholar]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
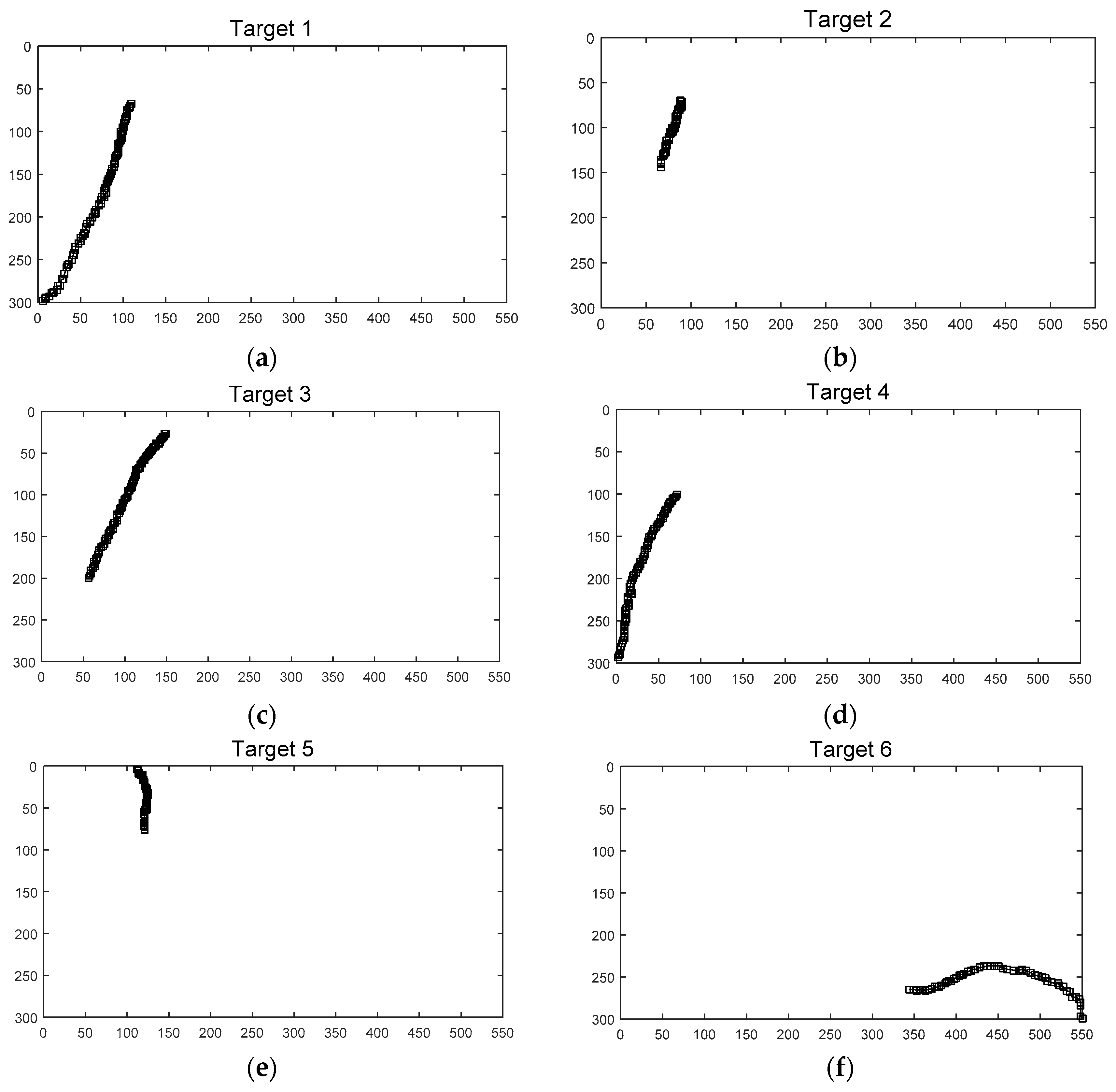
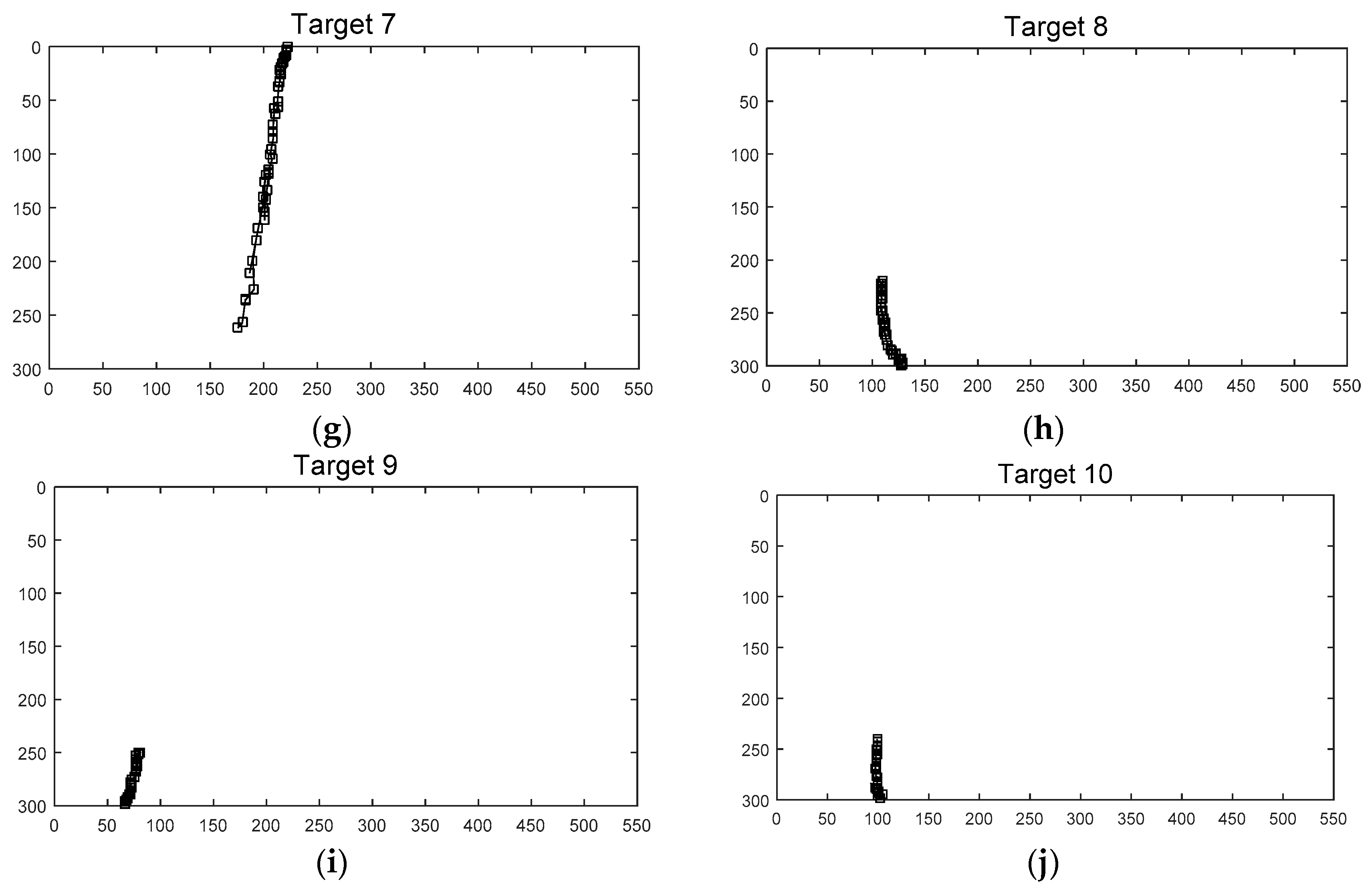
| Target No. | First Frame | Last Frame | Direction | Component |
|---|---|---|---|---|
| Target 1 | 1 | 515 | Downward | 1–2 person(s) |
| Target 2 | 1 | 237 | Downward | 1 person |
| Target 3 | 1 | 550 | Downward | 2 people |
| Target 4 | 123 | 550 | Upward | 3 people |
| Target 5 | 218 | 550 | Downward | 1 person |
| Target 6 | 266 | 550 | Left | 1 person |
| Target 7 | 310 | 550 | Downward | 1 Car |
| Target 8 | 379 | 550 | Upwards | 1 person |
| Target 9 | 411 | 550 | Upwards | 1 person |
| Target 10 | 397 | 550 | Upwards | 1 person |
| Target No | Initial Frame | Final Frame | # of Frames | # of Detection | Detection Rate (%) |
|---|---|---|---|---|---|
| Target 1 | 6 | 515 | 510 | 510 | 100% |
| Target 2 | 6 | 237 | 232 | 230 | 99% |
| Target 3 | 6 | 550 | 545 | 545 | 100% |
| Target 4 | 128 | 550 | 423 | 423 | 100% |
| Target 5 | 223 | 550 | 328 | 242 | 74% |
| Target 6 | 271 | 550 | 280 | 280 | 100% |
| Target 7 | 315 | 550 | 236 | 236 | 100% |
| Target 8 | 384 | 550 | 167 | 167 | 100% |
| Target 9 | 416 | 550 | 135 | 130 | 96% |
| Target 10 | 402 | 550 | 149 | 143 | 96% |
| Avg. | - | - | 326 | 316 | 96.5% |
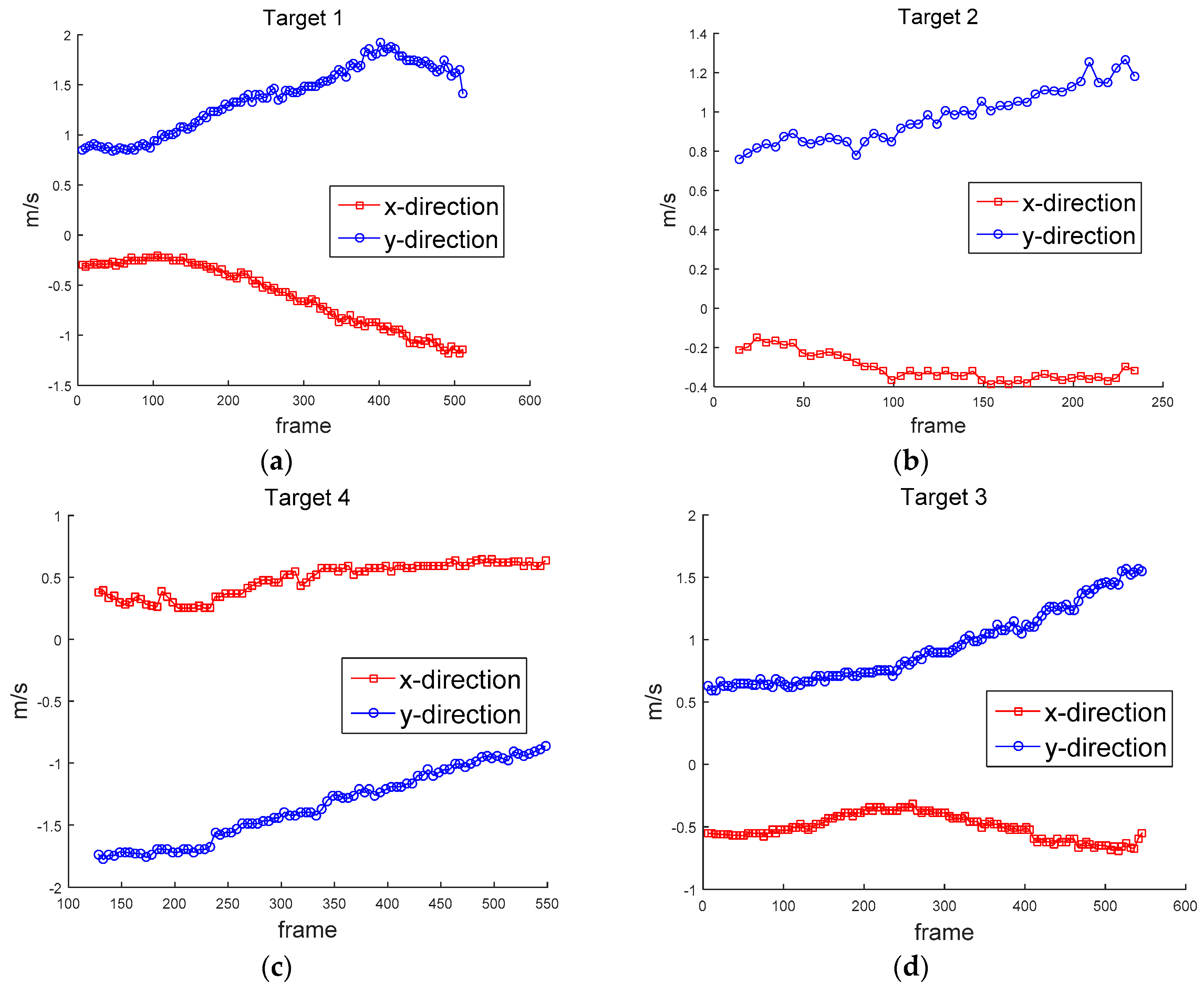
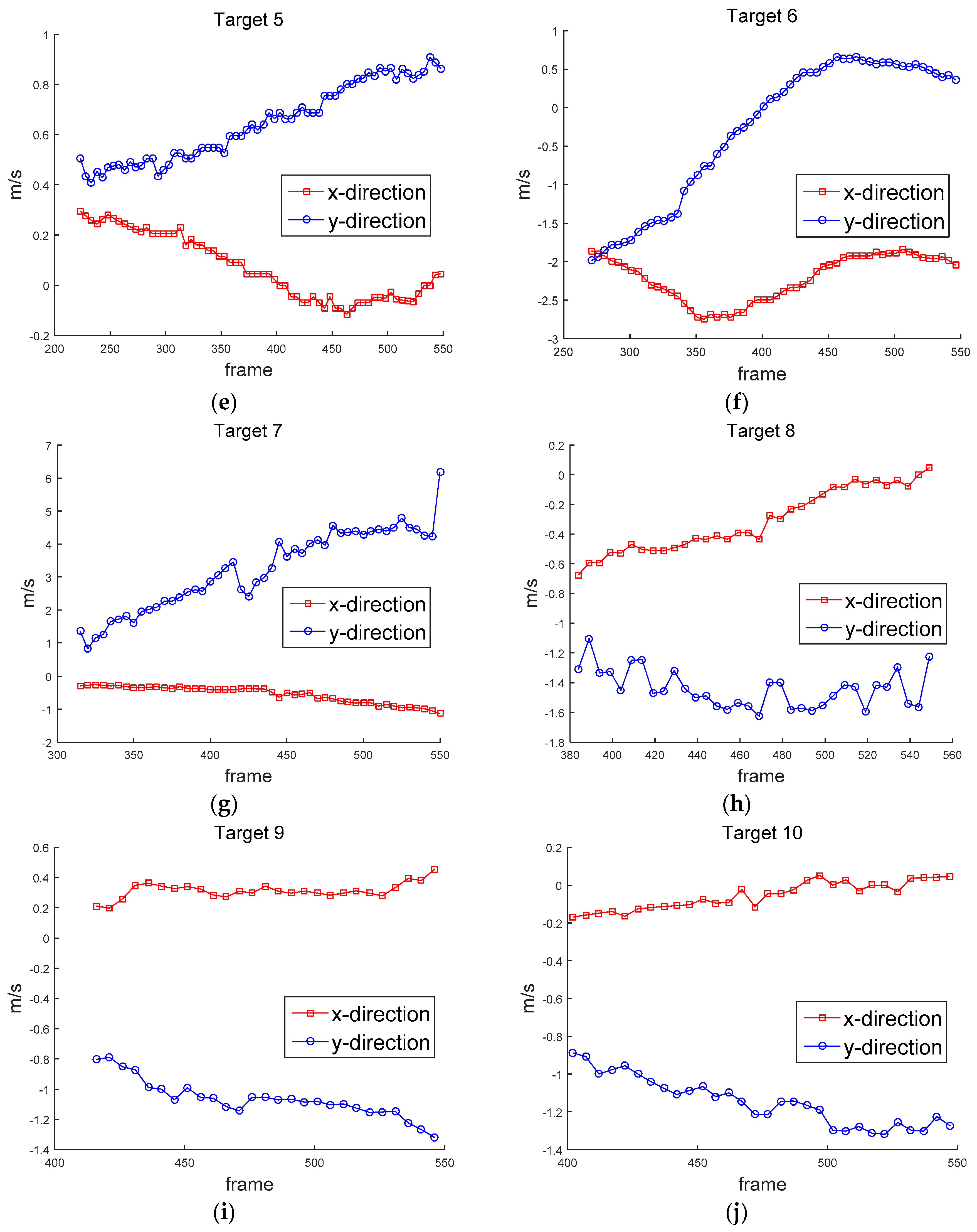
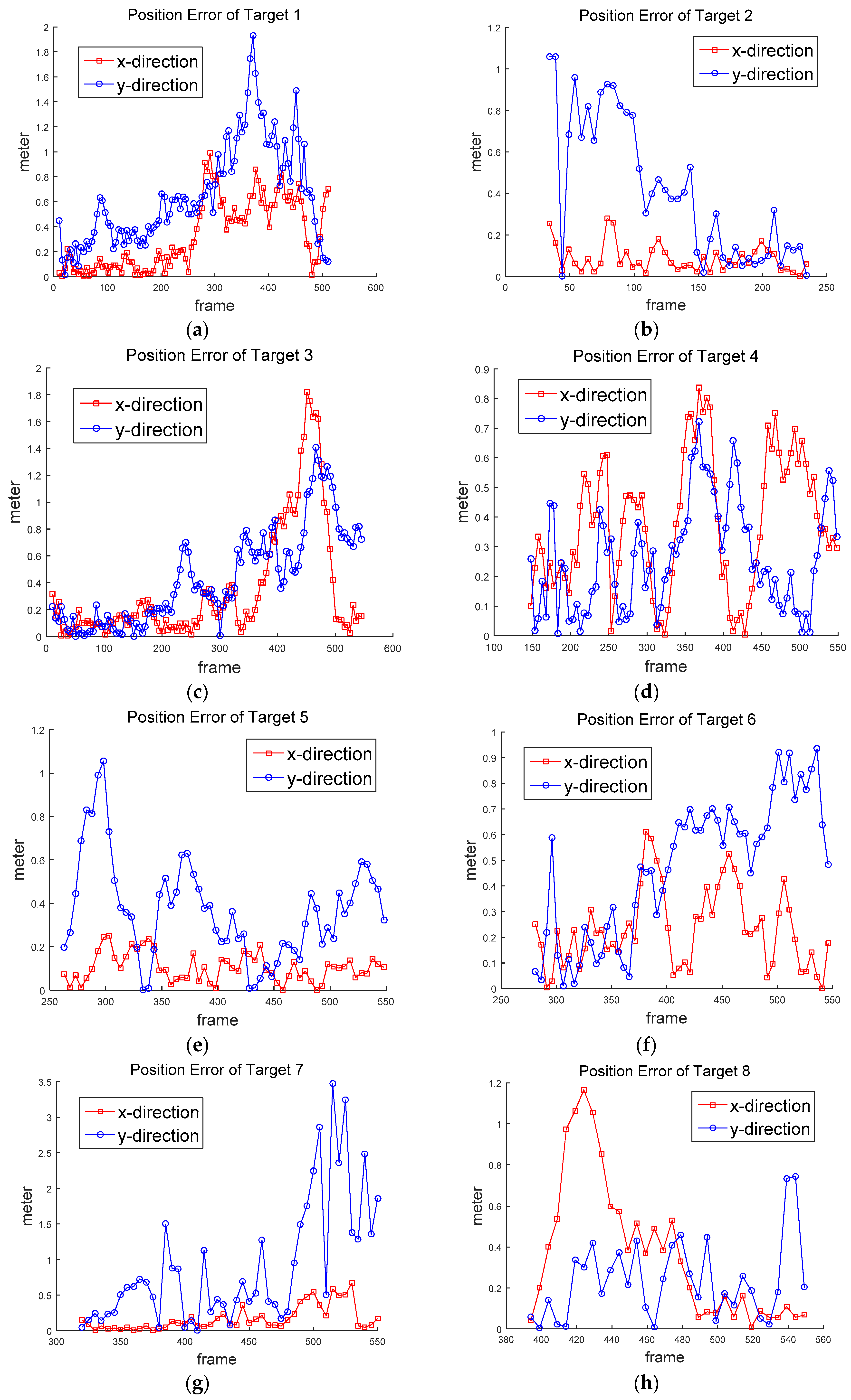
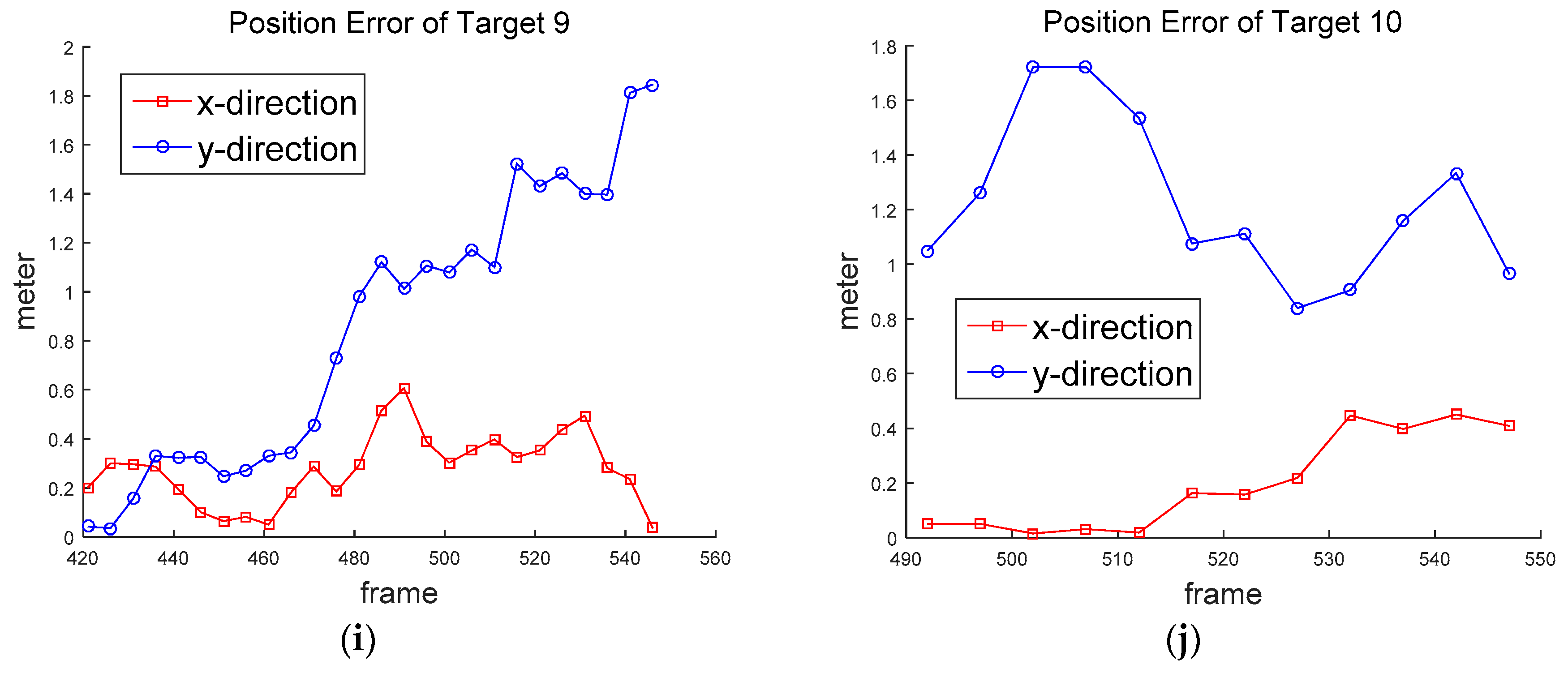
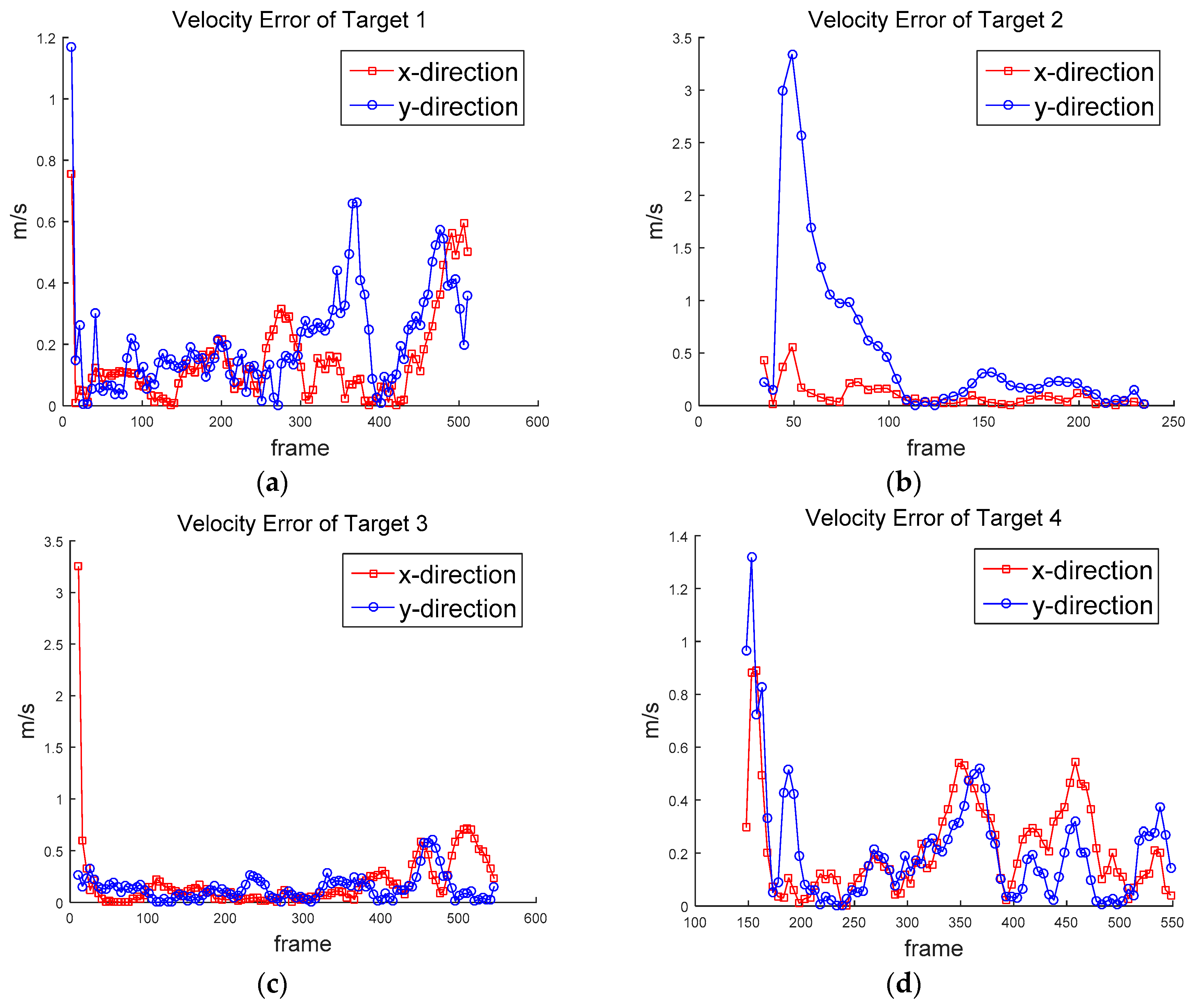
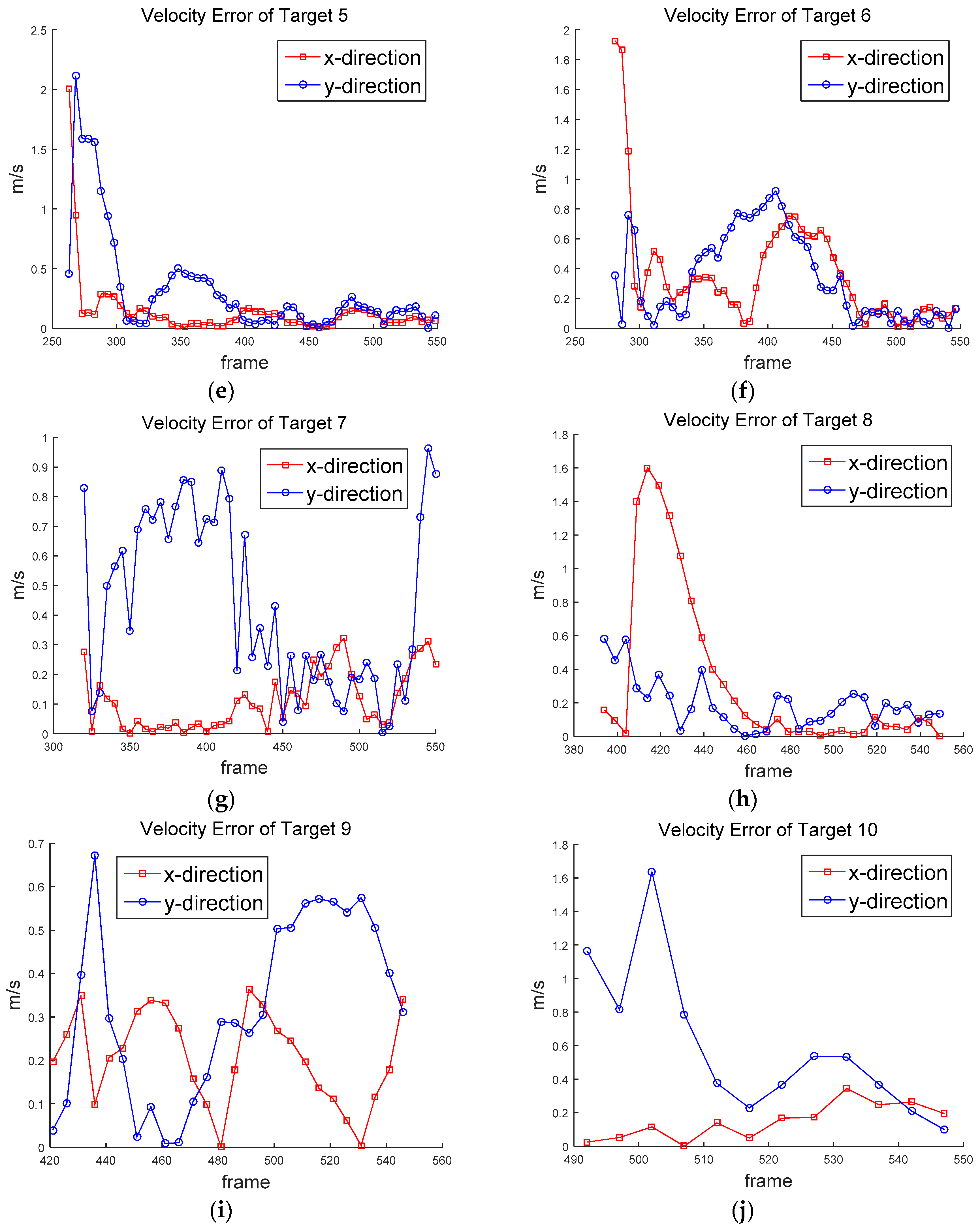
| Target No. | Kalman Filter | Two-Mode IMM Filter | Three-Mode IMM Filter | |||
|---|---|---|---|---|---|---|
| Position (Meter) | Velocity (m/s) | Position (Meter) | Velocity (m/s) | Position (Meter) | Velocity (m/s) | |
| Target 1 | 0.8833 | 0.3412 | 0.8839 | 0.3419 | 0.8827 | 0.3419 |
| Target 2 | 0.5420 | 0.9592 | 0.5428 | 0.9589 | 0.5412 | 0.9589 |
| Target 3 | 0.7956 | 0.4418 | 0.7958 | 0.4466 | 0.8033 | 0.4466 |
| Target 4 | 0.5460 | 0.4186 | 0.5429 | 0.4162 | 0.5563 | 0.4290 |
| Target 5 | 0.4543 | 0.6297 | 0.4547 | 0.6295 | 0.4540 | 0.6299 |
| Target 6 | 0.6071 | 0.6922 | 0.6105 | 0.6941 | 0.6039 | 0.6904 |
| Target 7 | 1.2829 | 0.5496 | 1.2786 | 0.5476 | 1.2871 | 0.5493 |
| Target 8 | 0.5825 | 0.6356 | 0.5832 | 0.6358 | 0.5818 | 0.6354 |
| Target 9 | 1.0639 | 0.4462 | 1.0627 | 0.4444 | 1.065 | 0.4481 |
| Target 10 | 1.2842 | 0.7522 | 1.2842 | 0.7522 | 1.284 | 0.7522 |
| Average | 0.8042 | 0.5866 | 0.8039 | 0.5860 | 0.8060 | 0.5882 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yeom, S.; Cho, I.-J. Detection and Tracking of Moving Pedestrians with a Small Unmanned Aerial Vehicle. Appl. Sci. 2019, 9, 3359. https://doi.org/10.3390/app9163359
Yeom S, Cho I-J. Detection and Tracking of Moving Pedestrians with a Small Unmanned Aerial Vehicle. Applied Sciences. 2019; 9(16):3359. https://doi.org/10.3390/app9163359
Chicago/Turabian StyleYeom, Seokwon, and In-Jun Cho. 2019. "Detection and Tracking of Moving Pedestrians with a Small Unmanned Aerial Vehicle" Applied Sciences 9, no. 16: 3359. https://doi.org/10.3390/app9163359
APA StyleYeom, S., & Cho, I.-J. (2019). Detection and Tracking of Moving Pedestrians with a Small Unmanned Aerial Vehicle. Applied Sciences, 9(16), 3359. https://doi.org/10.3390/app9163359