Multi Simulation Platform for Time Domain Diffuse Optical Tomography: An Application to a Compact Hand-Held Reflectance Probe

 , ,
, ,
Abstract
Featured Application
Abstract
1. Introduction
2. Materials and Methods
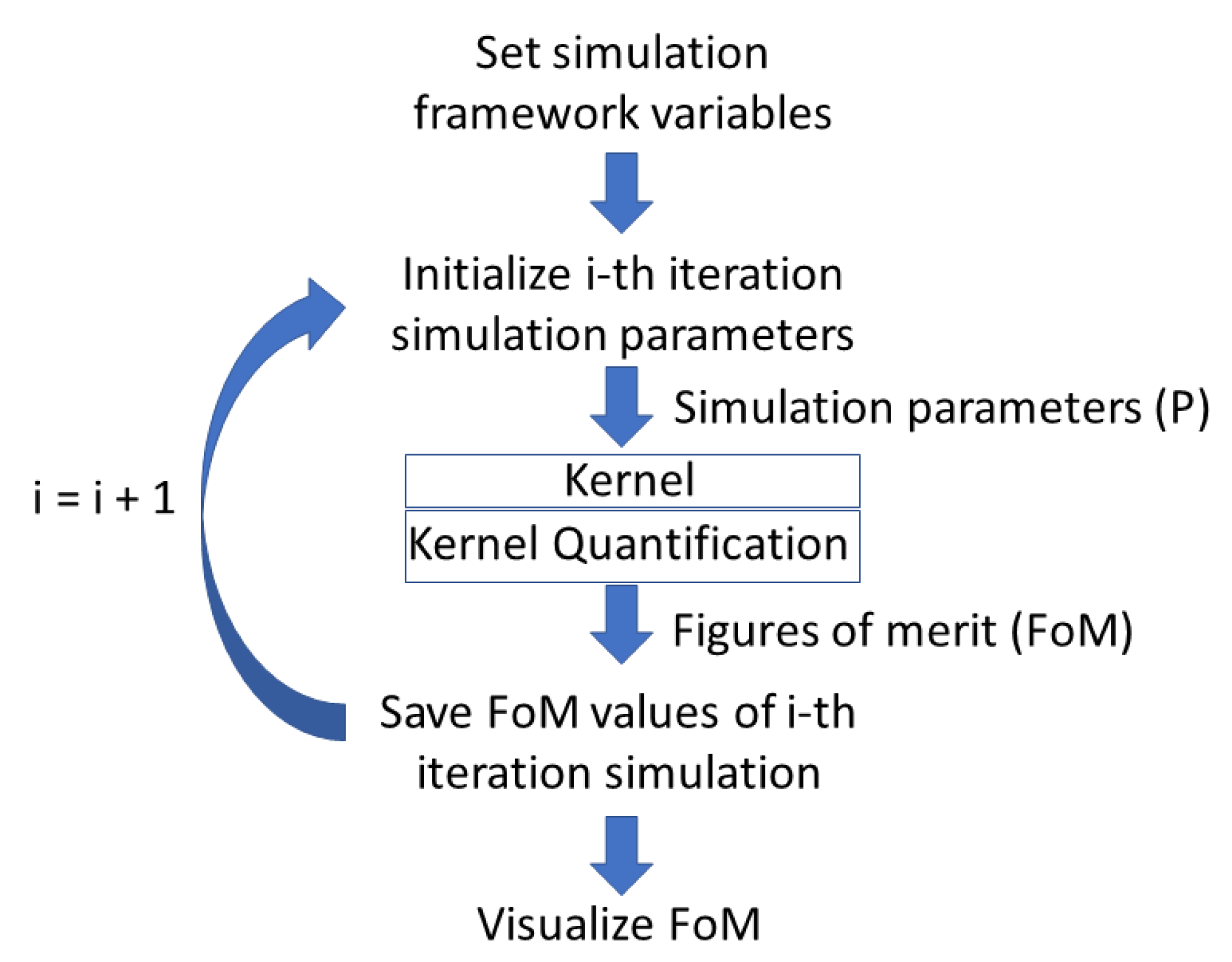
2.1. Multi Simulation Platform
- Setting of the simulation framework variables;
- Simulation parameters update and override onto the default values;
- The kernel: The single-shot simulation core code for the specific application the user wishes;
- Quantification and extraction of the FoMs;
- Visualization of the FoMs.
2.2. Tomographic Kernel
2.3. Simulation Overview
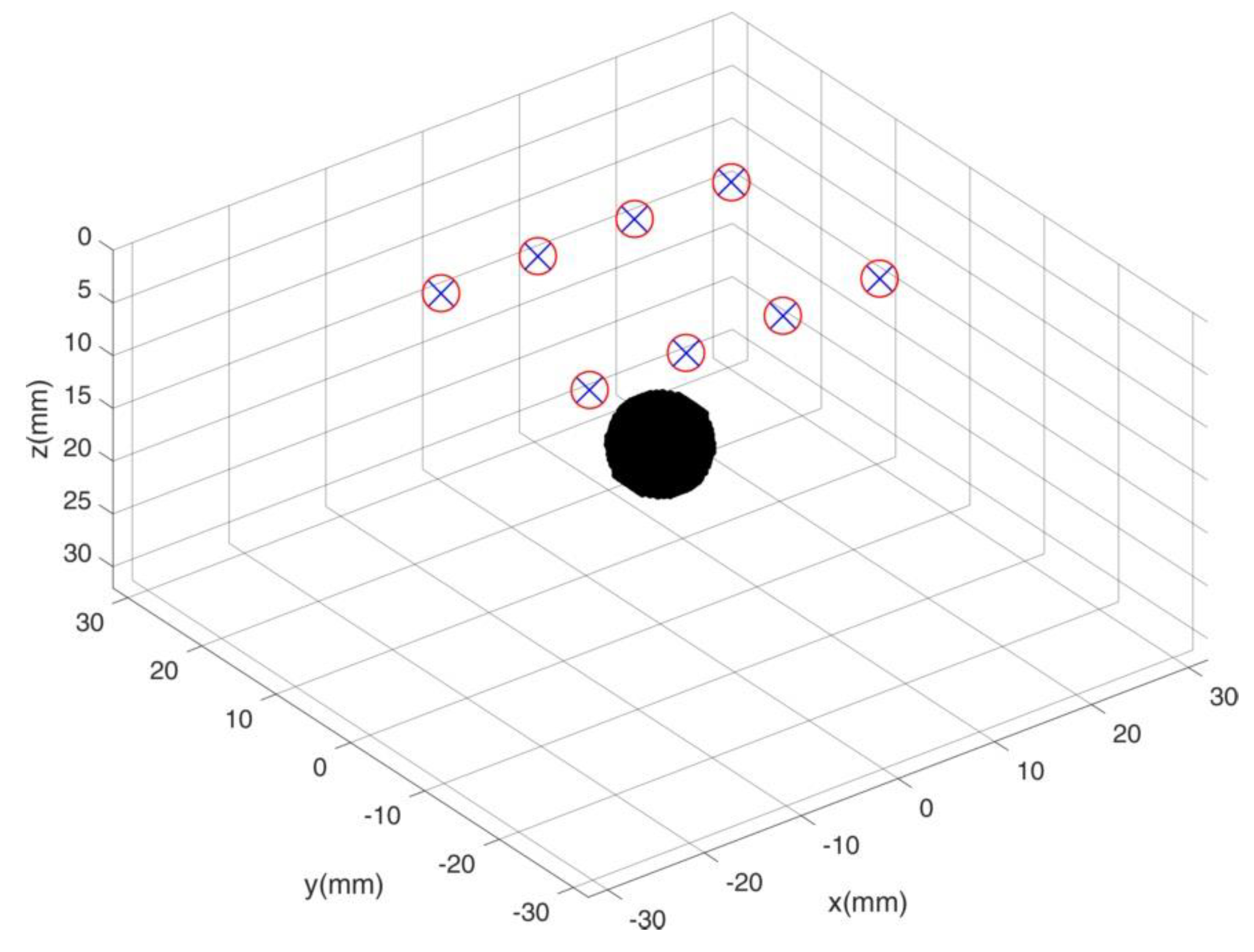
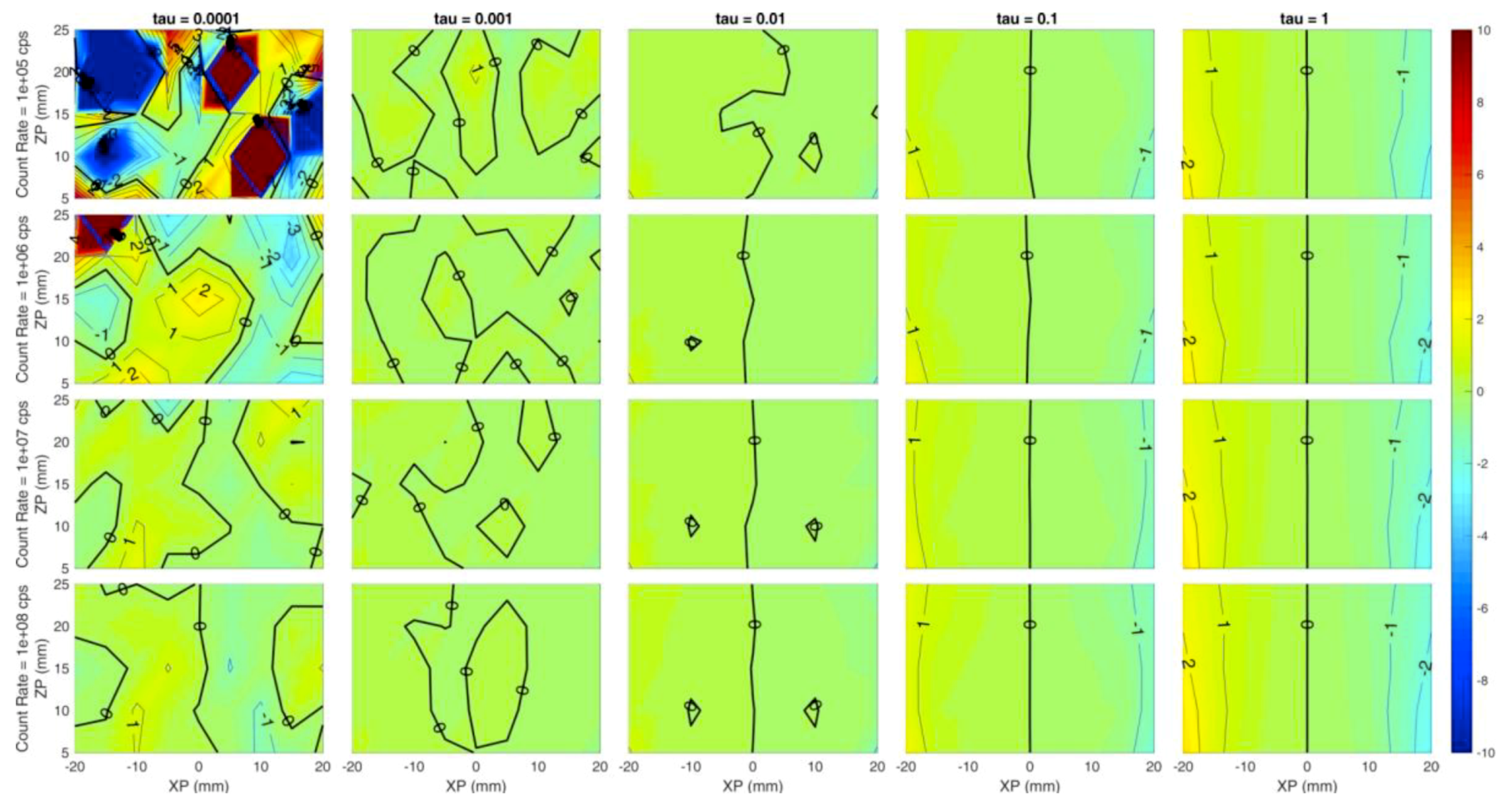
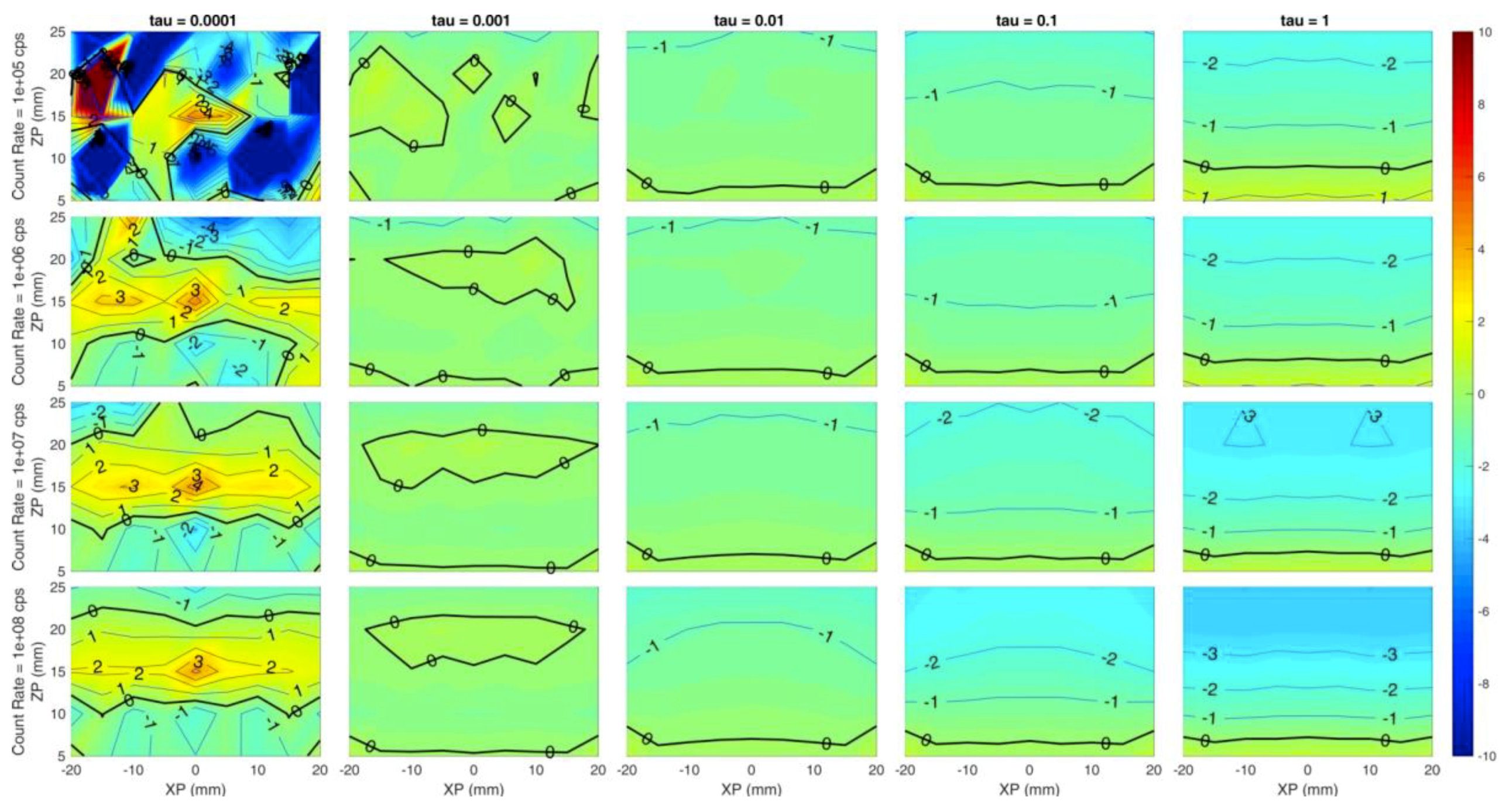
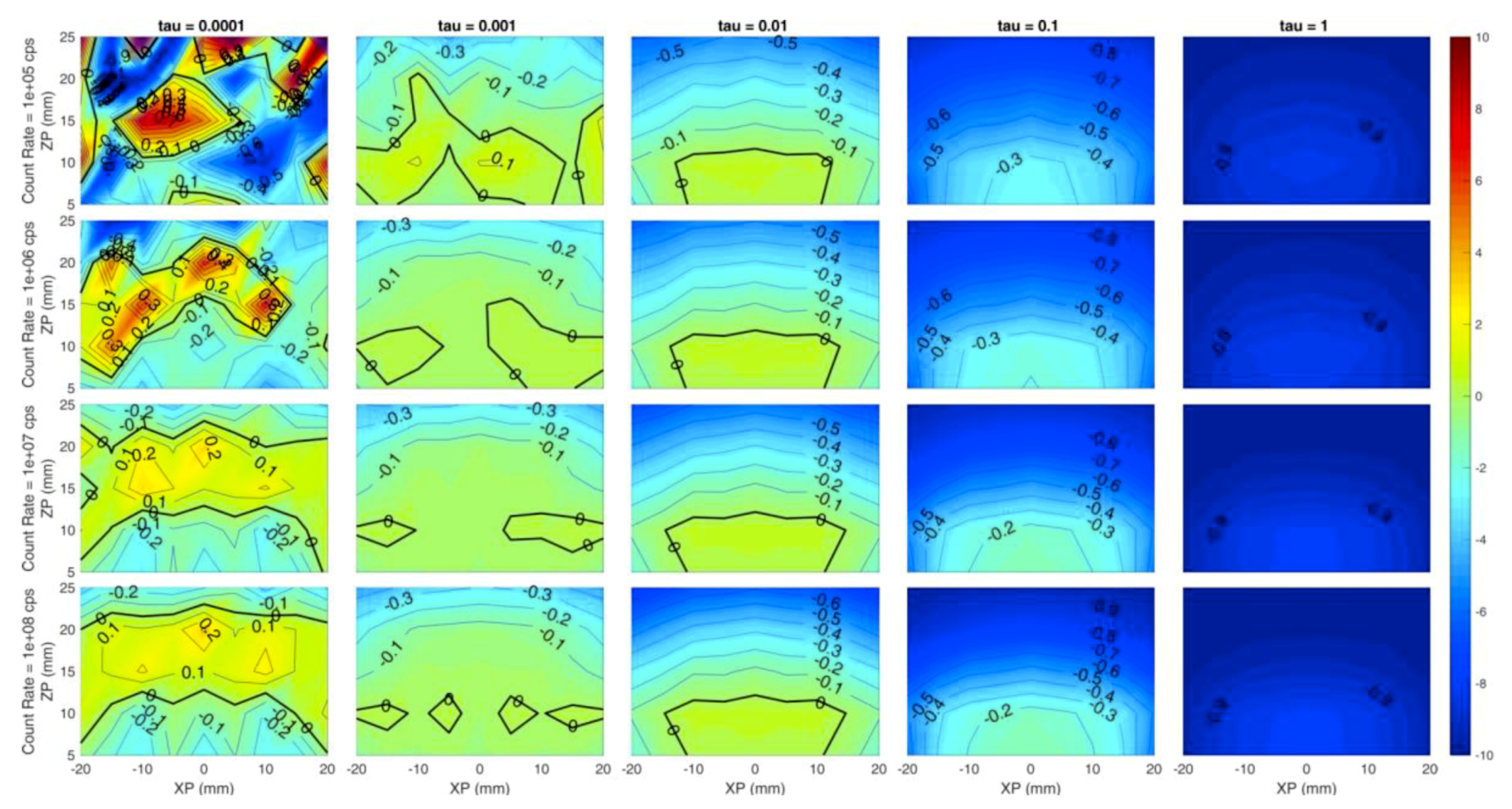
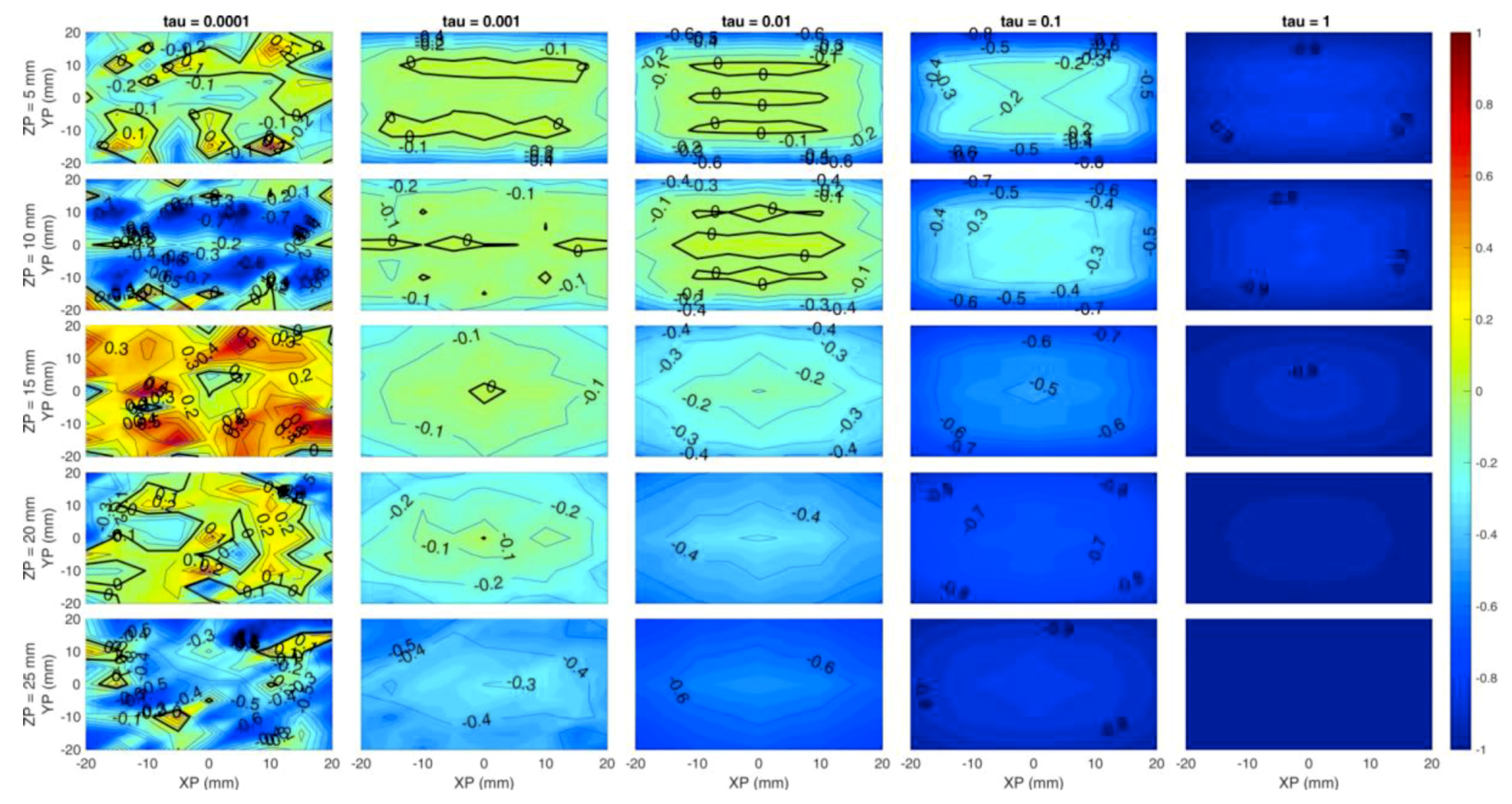
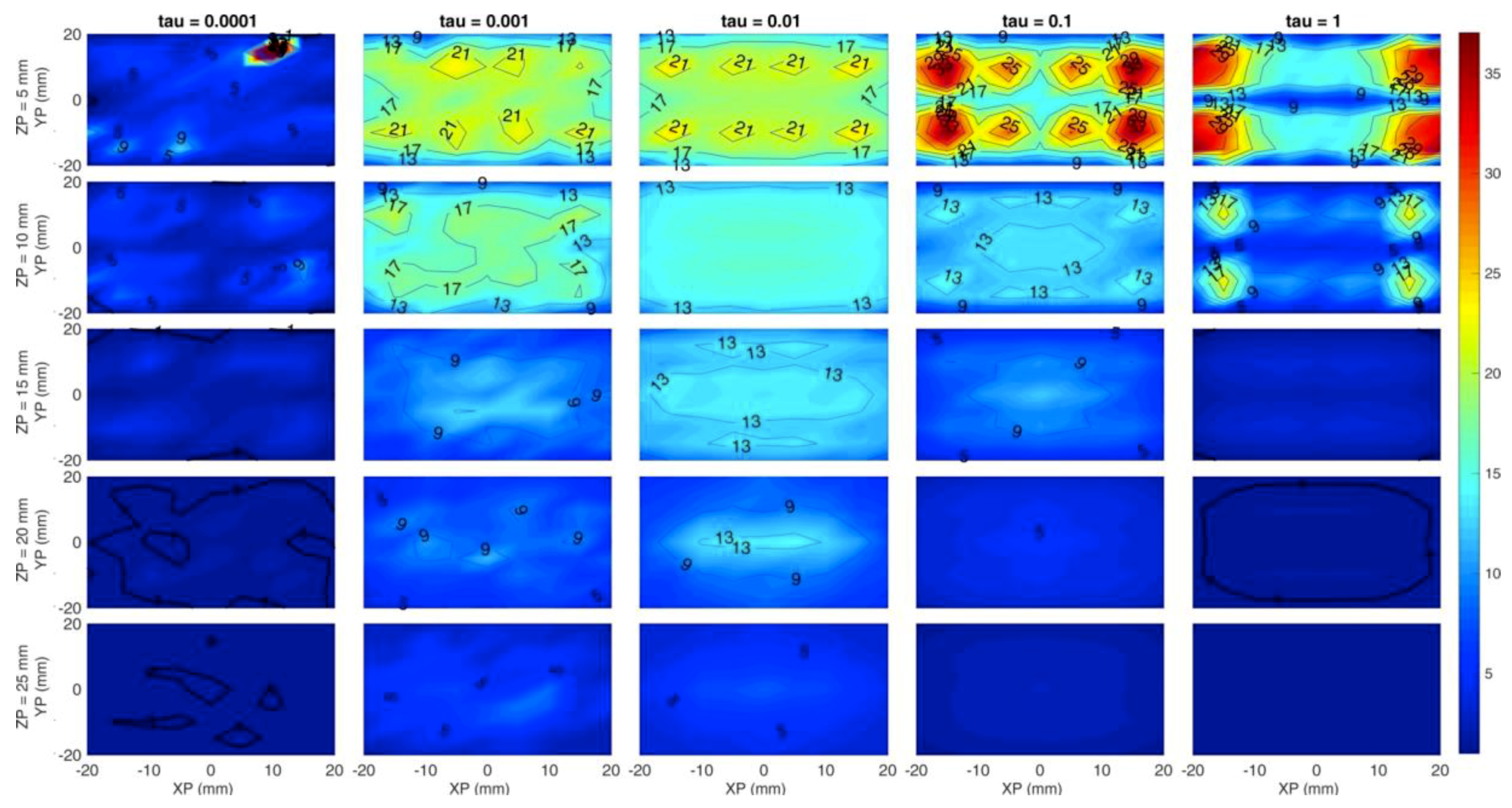
- The error on the localization of the reconstructed inclusion along the three axes x, y and z with respect to the simulated position according to the center of mass.
- The volumetric error on is calculated as:where ROI is a spherical region of interest (ROI) of radius 2 cm cantered on the center of mass of the reconstructed inclusion and and are the true and reconstructed absorption perturbation values.
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Koenig, A.; Hervé, L.; da Silva, A.; Dinten, J.M.; Boutet, J.; Berger, M.; Texier, I.; Peltié, P.; Rizo, P.; Josserand, V.; et al. Whole body small animal examination with a diffuse optical tomography instrument. Nucl. Instrum. Methods Phys. Res. Sect. A Accel. Spectrometers Detect. Assoc. Equip. 2007, 571, 56–59. [Google Scholar] [CrossRef]
- Durduran, T.; Choe, R.; Baker, W.; Yodh, A. Diffuse optics for tissue monitoring and tomography. Rep. Prog. Phys. 2010, 73, 076701. [Google Scholar] [CrossRef] [PubMed]
- Eggebrecht, A.T.; Ferradal, S.L.; Robichaux-Viehoever, A.; Hassanpour, M.S.; Dehghani, H.; Snyder, A.Z.; Hershey, T.; Culver, J.P. Mapping distributed brain function and networks with diffuse optical tomography. Nat. Photonics 2014, 8, 448–454. [Google Scholar] [CrossRef] [PubMed]
- Pifferi, A.; Contini, D.; Dalla Mora, A.; Farina, A.; Spinelli, L.; Torricelli, A. New frontiers in time-domain diffuse optics, a review. J. Biomed. Opt. 2016, 21, 091310. [Google Scholar] [CrossRef] [PubMed]
- Dalla Mora, A.; Contini, D.; Arridge, S.; Martelli, F.; Tosi, A.; Boso, G.; Farina, A.; Durduran, T.; Martinenghi, E.; Torricelli, A.; et al. Towards next-generation time-domain diffuse optics for extreme depth penetration and sensitivity. Biomed. Opt. Express 2015, 6, 1749–1760. [Google Scholar] [CrossRef] [PubMed]
- Farina, A.; Tagliabue, S.; di Sieno, L.; Martinenghi, E.; Durduran, T.; Arridge, S.; Martelli, F.; Torricelli, A.; Pifferi, A.; Dalla Mora, A. Time-Domain Functional Diffuse Optical Tomography System Based on Fiber-Free Silicon Photomultipliers. Appl. Sci. 2017, 7, 1235. [Google Scholar] [CrossRef]
- Bray, F.; Ferlay, J.; Soerjomataram, I.; Siegel, R.L.; Torre, L.A.; Jemal, A. Global cancer statistics 2018: GLOBOCAN estimates of incidence and mortality worldwide for 36 cancers in 185 countries. CA. Cancer J. Clin. 2018, 68, 394–424. [Google Scholar] [CrossRef] [PubMed]
- Sasieni, P.D.; Shelton, J.; Ormiston-Smith, N.; Thomson, C.S.; Silcocks, P.B. What is the lifetime risk of developing cancer?: The effect of adjusting for multiple primaries. Br. J. Cancer 2011, 105, 460–465. [Google Scholar] [CrossRef]
- Pisano, E.D.; Gatsonis, C.; Hendrick, E.; Yaffe, M.; Baum, J.K.; Acharyya, S.; Conant, E.F.; Fajardo, L.L.; Bassett, L.; D’Orsi, C.; et al. Diagnostic Performance of Digital versus Film Mammography for Breast-Cancer Screening. N. Engl. J. Med. 2005, 353, 1773–1783. [Google Scholar] [CrossRef]
- Marshall, E. Brawling Over Mammography. Science 2010, 327, 936–938. [Google Scholar] [CrossRef]
- Hylton, N. Magnetic Resonance Imaging of the Breast: Opportunities to Improve Breast Cancer Management. J. Clin. Oncol. 2005, 23, 1678–1684. [Google Scholar] [CrossRef] [PubMed]
- Lord, S.J.; Lei, W.; Craft, P.; Cawson, J.N.; Morris, I.; Walleser, S.; Griffiths, A.; Parker, S.; Houssami, N. A systematic review of the effectiveness of magnetic resonance imaging (MRI) as an addition to mammography and ultrasound in screening young women at high risk of breast cancer. Eur. J. Cancer 2007, 43, 1905–1917. [Google Scholar] [CrossRef] [PubMed]
- Christiansen, C.L. Predicting the Cumulative Risk of False-Positive Mammograms. J. Natl. Cancer Inst. 2000, 92, 1657–1666. [Google Scholar] [CrossRef] [PubMed]
- Hubbard, R.A.; Kerlikowske, K.; Flowers, C.I.; Yankaskas, B.C.; Zhu, W.; Miglioretti, D.L. Cumulative probability of false-positive recall or biopsy recommendation after 10 years of screening mammography: A cohort study. Obstet. Gynecol. Surv. 2012, 67, 162–163. [Google Scholar] [CrossRef]
- Pinkert, M.A.; Salkowski, L.R.; Keely, P.; Hall, T.J.; Block, W.F.; Eliceiri, K.W. Review of quantitative multiscale imaging of breast cancer. J. Med. Imaging 2018, 5, 010901. [Google Scholar] [CrossRef]
- Wabnitz, H.; Taubert, D.R.; Mazurenka, M.; Steinkellner, O.; Jelzow, A.; Macdonald, R.; Milej, D.; Sawosz, P.; Kacprzak, M.; Liebert, A.; et al. Performance assessment of time-domain optical brain imagers, part 1: Basic instrumental performance protocol. J. Biomed. Opt. 2014, 19, 86010. [Google Scholar] [CrossRef]
- Pifferi, A.; Torricelli, A.; Bassi, A.; Taroni, P.; Cubeddu, R.; Wabnitz, H.; Grosenick, D.; Möller, M.; Macdonald, R.; Swartling, J.; et al. Performance assessment of photon migration instruments: The MEDPHOT protocol. Appl. Opt. 2005, 44, 2104–2114. [Google Scholar] [CrossRef]
- Wabnitz, H.; Jelzow, A.; Mazurenka, M.; Steinkellner, O.; Macdonald, R.; Milej, D.; Zolek, N.; Kacprzak, M.; Sawosz, P.; Maniewski, R.; et al. Performance assessment of time-domain optical brain imagers, part 2: nEUROPt protocol. J. Biomed. Opt. 2014, 19, 086012. [Google Scholar] [CrossRef]
- Schweiger, M.; Arridge, S. The Toast++ software suite for forward and inverse modeling in optical tomography. J. Biomed. Opt. 2014, 19, 040801. [Google Scholar] [CrossRef]
- Dehghani, H.; Eames, M.E.; Yalavarthy, P.K.; Davis, S.C.; Srinivasan, S.; Carpenter, C.M.; Pogue, B.W.; Paulsen, K.D. Near infrared optical tomography using NIRFAST: Algorithm for numerical model and image reconstruction. Commun. Numer. Methods Eng. 2009, 25, 711–732. [Google Scholar] [CrossRef]
- Martelli, F.; del Bianco, S.; Ismaelli, A.; Zaccanti, G. Light Propagation through Biological Tissue and Other Diffusive Media: Theory, Solutions, and Software; SPIE Press Monograph: Bellingham, WA, USA, 2009. [Google Scholar]
- Arridge, S.R.; Schweiger, M.; Hiraoka, M.; Delpy, D.T. A finite element approach for modeling photon transport in tissue. Med. Phys. 1993, 20, 299–309. [Google Scholar] [CrossRef]
- Fang, Q.; Boas, D.A. Monte Carlo Simulation of Photon Migration in 3D Turbid Media Accelerated by Graphics Processing Units. Opt. Express 2009, 17, 20178–20190. [Google Scholar] [CrossRef]
- Fang, Q.; Kaeli, D.R. Accelerating mesh-based Monte Carlo method on modern CPU architectures. Biomed. Opt. Express 2012, 3, 3223–3230. [Google Scholar] [CrossRef]
- Tosi, A.; Dalla Mora, A.; Zappa, F.; Gulinatti, A.; Contini, D.; Pifferi, A.; Spinelli, L.; Torricelli, A.; Cubeddu, R. Fast-gated single-photon counting technique widens dynamic range and speeds up acquisition time in time-resolved measurements. Opt. Express 2011, 19, 10735–10746. [Google Scholar] [CrossRef]
- Okawa, S.; Hoshi, Y.; Yamada, Y. Improvement of image quality of time-domain diffuse optical tomography with lp sparsity regularization. Biomed. Opt. Express 2011, 2, 3334–3348. [Google Scholar] [CrossRef]
- Kavuri, V.C.; Lin, Z.-J.; Tian, F.; Liu, H. Sparsity enhanced spatial resolution and depth localization in diffuse optical tomography. Biomed. Opt. Express 2012, 3, 943–957. [Google Scholar] [CrossRef]
- Shaw, C.B.; Yalavarthy, P.K. Performance evaluation of typical approximation algorithms for nonconvex ℓ_p-minimization in diffuse optical tomography. J. Opt. Soc. Am. A 2014, 31, 852–862. [Google Scholar] [CrossRef]
- Hiltunen, P.; Calvetti, D.; Somersalo, E. An adaptive smoothness regularization algorithm for optical tomography. Opt. Express 2008, 16, 19957–19977. [Google Scholar] [CrossRef]
- Ferocino, E.; Pifferi, A.; Arridge, S.; Martelli, F.; Taroni, P.; Farina, A. Error on Z Coordinate with Voxel Size 1 mm. Available online: https://doi.org/10.6084/m9.figshare.7502300.v1 (accessed on 21 December 2018).
- Ferocino, E.; Pifferi, A.; Arridge, S.; Martelli, F.; Taroni, P.; Farina, A. Volumetric Error on the Absorption Coefficient for Different Numbers of Software Gates. Available online: https://doi.org/10.6084/m9.figshare.7502312.v2 (accessed on 21 December 2018).
- Ferocino, E.; Pifferi, A.; Arridge, S.; Martelli, F.; Taroni, P.; Farina, A. Error on Z Coordinate with Voxel Size 2 mm. Available online: https://doi.org/10.6084/m9.figshare.7502297.v2 (accessed on 21 December 2018).
- Ferocino, E.; Pifferi, A.; Arridge, S.; Martelli, F.; Taroni, P.; Farina, A. Volumetric Error on the Absorption Coefficient for Different Time Channel Duration. Available online: https://doi.org/10.6084/m9.figshare.7502309.v2 (accessed on 21 December 2018).
- Ferocino, E.; Pifferi, A.; Arridge, S.; Martelli, F.; Taroni, P.; Farina, A. Volumetric Error on the Absorption Coefficient for Different Numbers of Hardware gates. Available online: https://doi.org/10.6084/m9.figshare.7502327.v1 (accessed on 21 December 2018).
- Ferocino, E.; Pifferi, A.; Arridge, S.; Martelli, F.; Taroni, P.; Farina, A. Error on Z Coordinate with Voxel Size 5 mm. Available online: https://doi.org/10.6084/m9.figshare.7502306.v1 (accessed on 21 December 2018).
- Ducros, N.; D’Andrea, C.; Bassi, A.; Valentini, G.; Arridge, S. A virtual source pattern method for fluorescence tomography with structured light. Phys. Med. Biol. 2012, 57, 3811–3832. [Google Scholar] [CrossRef][Green Version]
- Arridge, S.; Kaipio, J.P.; Kolehmainen, V.; Schweiger, M.; Somersalo, E.; Tarvainen, T.; Vauhkonen, M. Approximation errors and model reduction with an application in optical diffusion tomography. Inverse Probl. 2006, 22, 175–195. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter # | ||||||
|---|---|---|---|---|---|---|
| Simulation Name | 1 | 2 | 3 | 4 | 5 | Added Poisson Noise |
| A | Xp | Yp | Zp | Regularization | Voxel Size | No |
| B | Xp | Yp | Zp | Time Channel | Number of Temporal Steps | No |
| C | Xp | Zp | Number of Time Windows | Regularization | - | Yes |
| D | Xp | Zp | Number of Delays | Regularization | - | Yes |
| E | Xp | Zp | Counts per Second | Regularization | - | Yes |
| F | Xp | Yp | Zp | Regularization | - | Yes |
| Parameter Name | Range | Default Value | Unit |
|---|---|---|---|
| Xp | −20:5:20 | - | mm |
| Yp | −20:5:20 | 0 (C, D, E) | mm |
| Zp | 5:5:25 | . | mm |
| Counts per Second | 105, 106, 107, 108 | 106 | cps |
| Number of Delays | 1, 3, 5, 10 | 1 (A, B), 3 (C, D, E, F) | - |
| Regularization | 10−4, 10−3, 10−2, 10−1, 1 | 10−4 (B) | - |
| Voxel size (1 side of a cube) | 1, 2, 5 | 2 | mm |
| Time Channel | 6, 12, 24, 48 | 12 | ps |
| Number of Temporal Steps | 200, 400, 600 | 600 | - |
| Number of Time Windows | 5, 10, 20, 40 | 20 | - |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ferocino, E.; Pifferi, A.; Arridge, S.; Martelli, F.; Taroni, P.; Farina, A. Multi Simulation Platform for Time Domain Diffuse Optical Tomography: An Application to a Compact Hand-Held Reflectance Probe. Appl. Sci. 2019, 9, 2849. https://doi.org/10.3390/app9142849
Ferocino E, Pifferi A, Arridge S, Martelli F, Taroni P, Farina A. Multi Simulation Platform for Time Domain Diffuse Optical Tomography: An Application to a Compact Hand-Held Reflectance Probe. Applied Sciences. 2019; 9(14):2849. https://doi.org/10.3390/app9142849
Chicago/Turabian StyleFerocino, Edoardo, Antonio Pifferi, Simon Arridge, Fabrizio Martelli, Paola Taroni, and Andrea Farina. 2019. "Multi Simulation Platform for Time Domain Diffuse Optical Tomography: An Application to a Compact Hand-Held Reflectance Probe" Applied Sciences 9, no. 14: 2849. https://doi.org/10.3390/app9142849
APA StyleFerocino, E., Pifferi, A., Arridge, S., Martelli, F., Taroni, P., & Farina, A. (2019). Multi Simulation Platform for Time Domain Diffuse Optical Tomography: An Application to a Compact Hand-Held Reflectance Probe. Applied Sciences, 9(14), 2849. https://doi.org/10.3390/app9142849