Impedance Modeling Based Method for Sub/Supsynchronous Oscillation Analysis of D-PMSG Wind Farm


Abstract
:1. Introduction
1.1. Related Works
1.2. Main Contribution
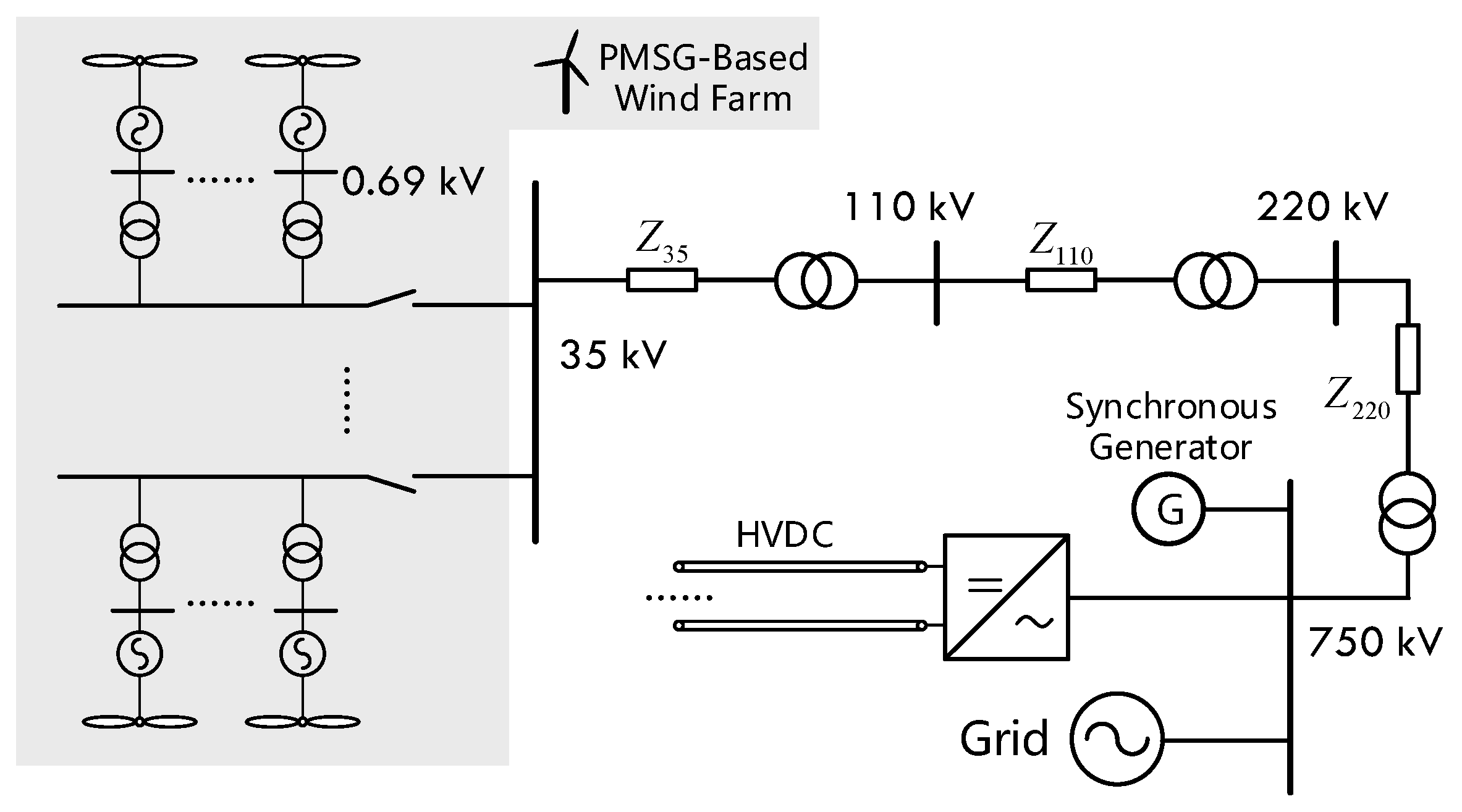
2. Impedance Characteristics Analysis of D-PMSG
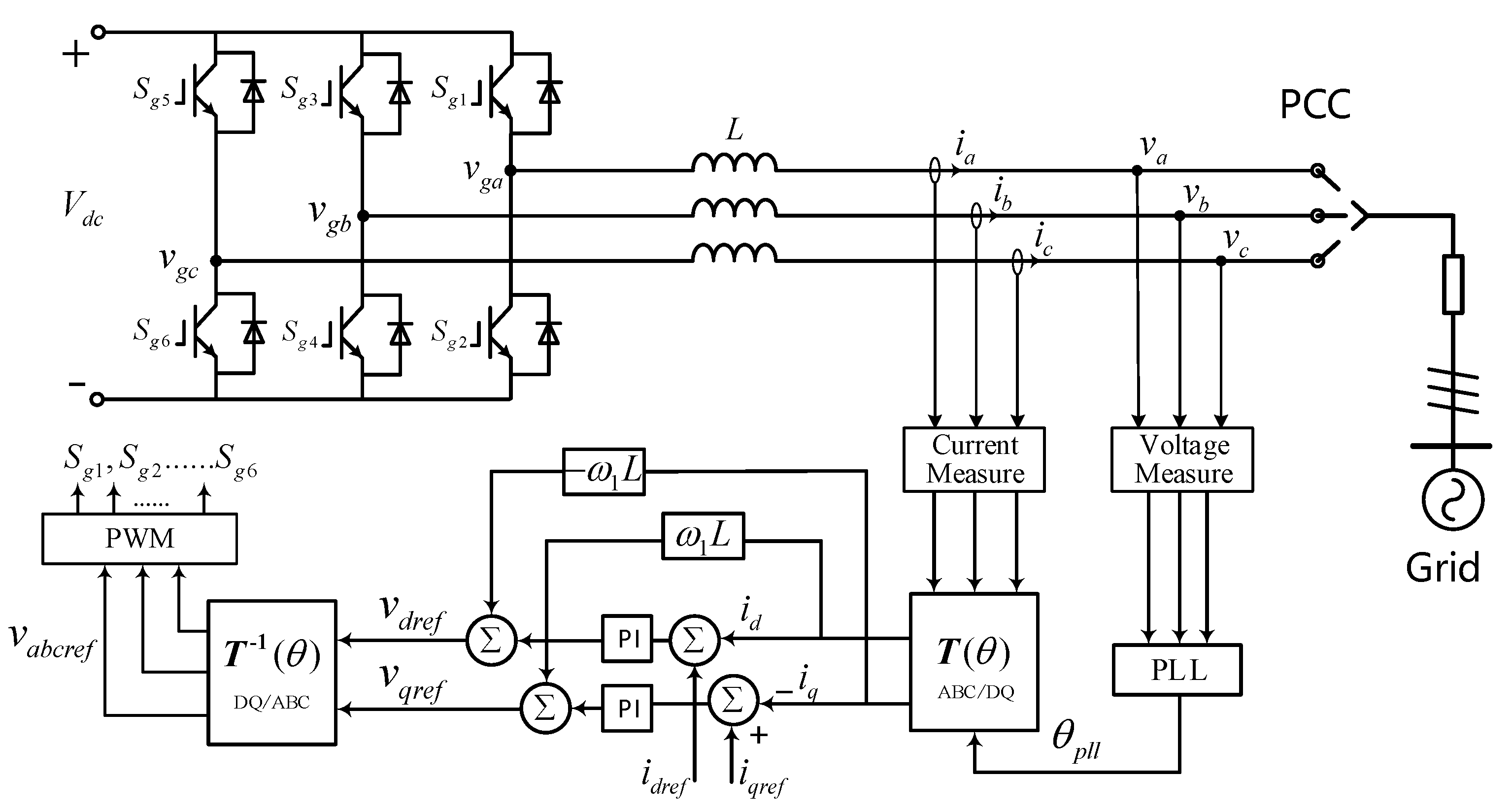
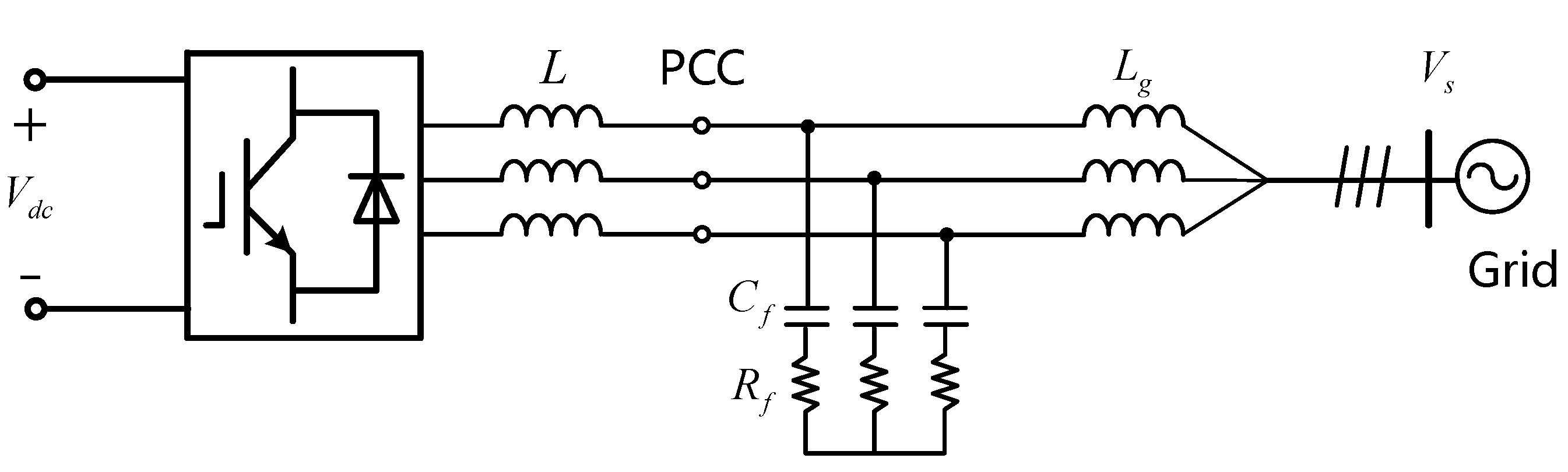
2.1. Simplified Model of D-PMSG
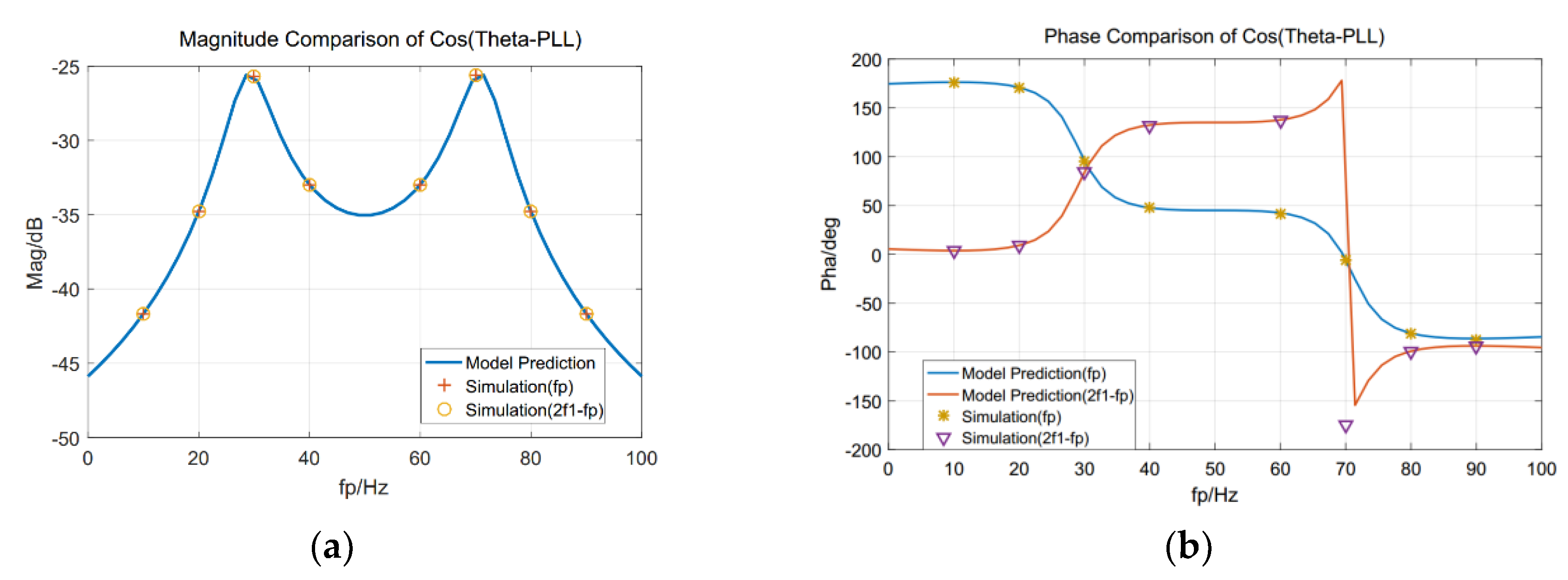
2.2. Small-Signal Modeling of the PLL
2.3. Impedance Modeling of D-PMSG
2.3.1. Harmonic Components in Control Loop
2.3.2. Simplified Model of the Converter
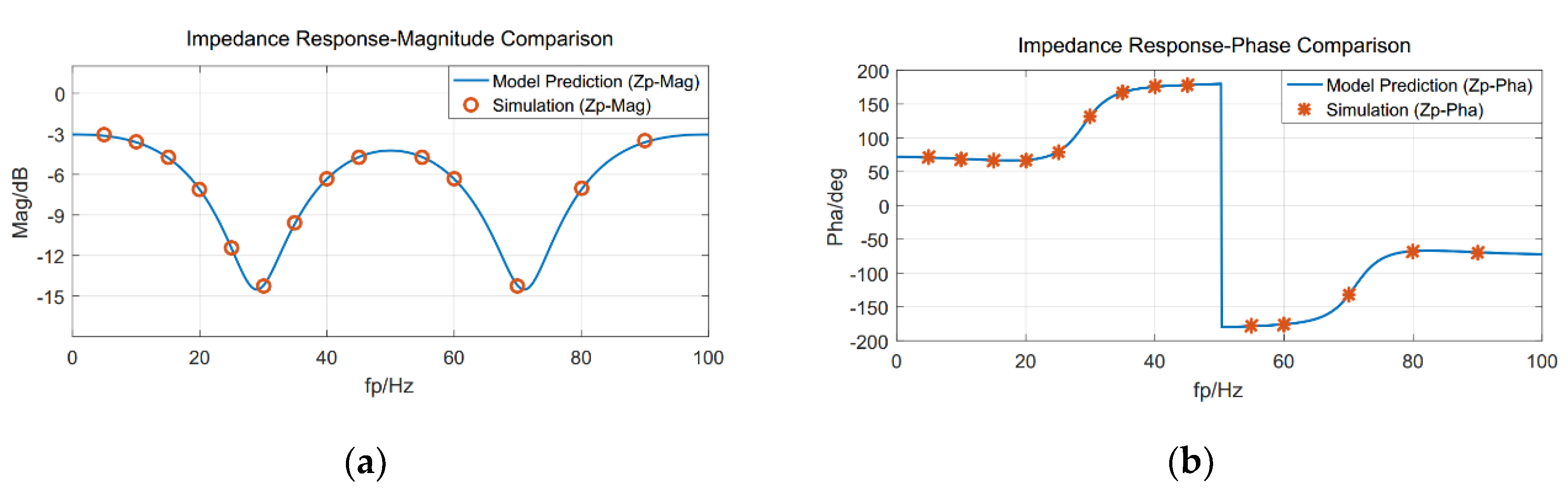
2.3.3. Impedance Analysis of D-PMSG
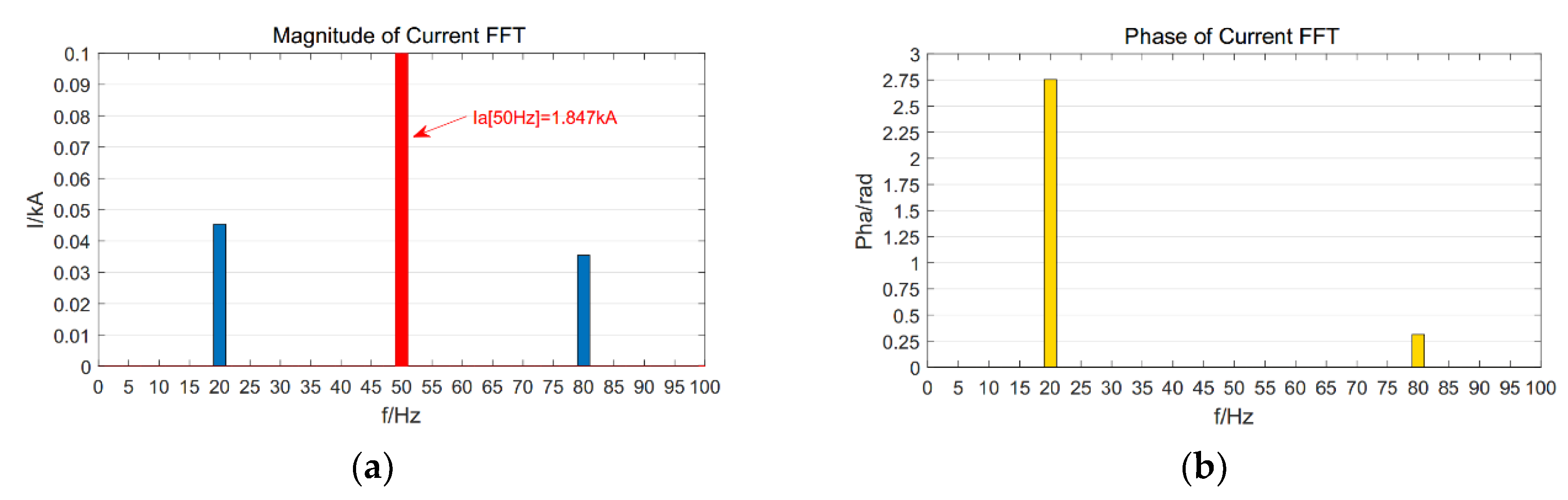
2.3.4. Frequency Coupling of the Sub/Supsynchronous Currents
3. Impedance-Based Stability Analysis of SSO
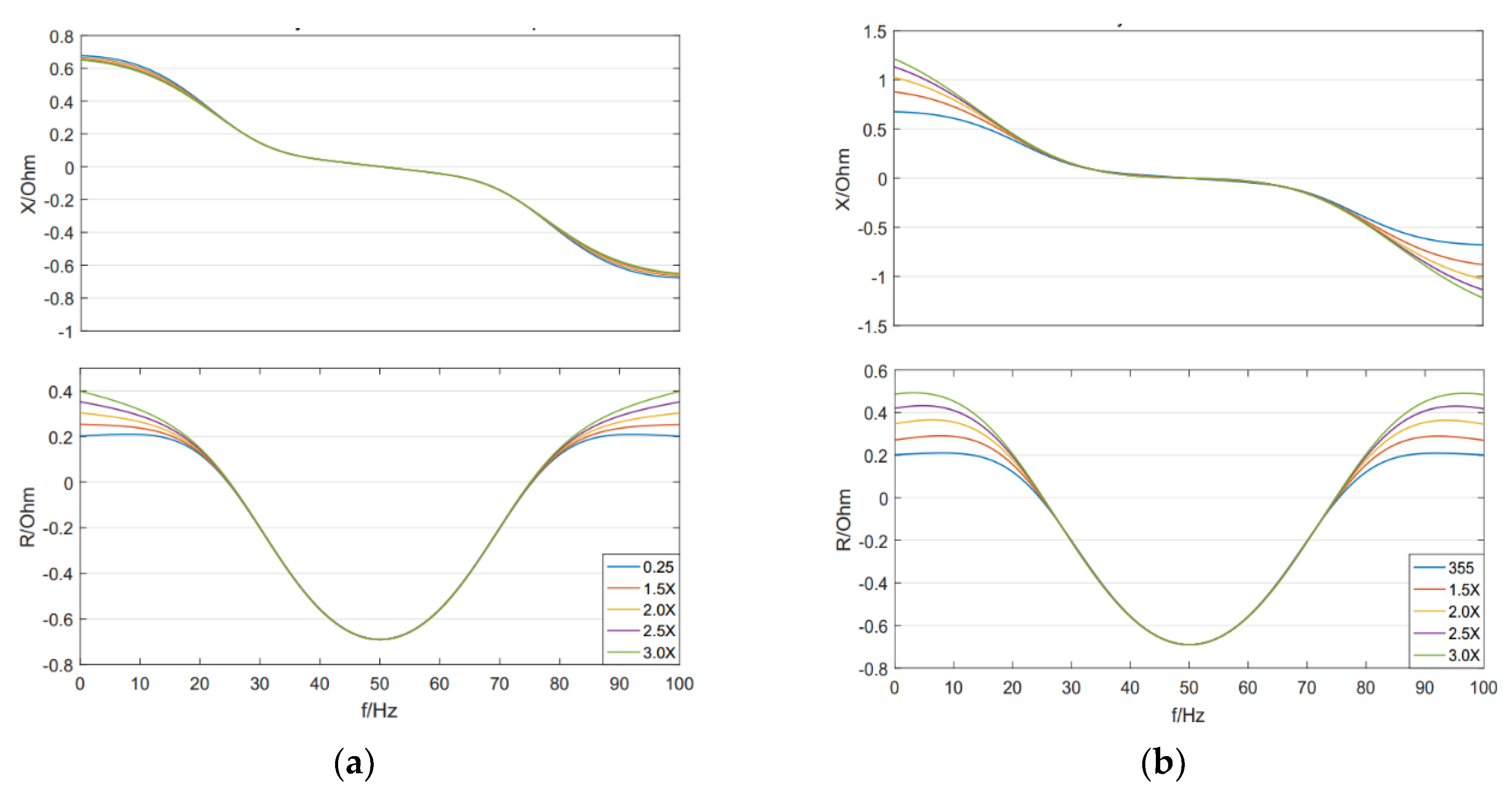
3.1. Impedance Sensitivity Analysis
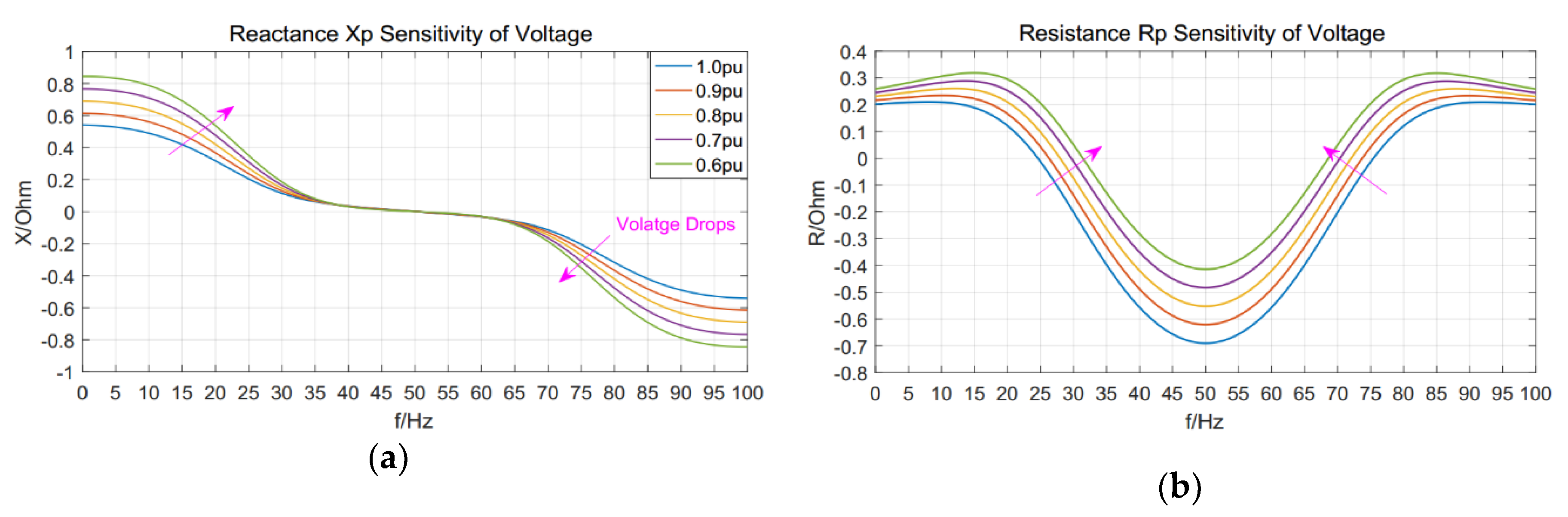
3.1.1. Impedance Sensitivity of Voltage Drops
3.2.2. Impedance Sensitivity of Current Drops
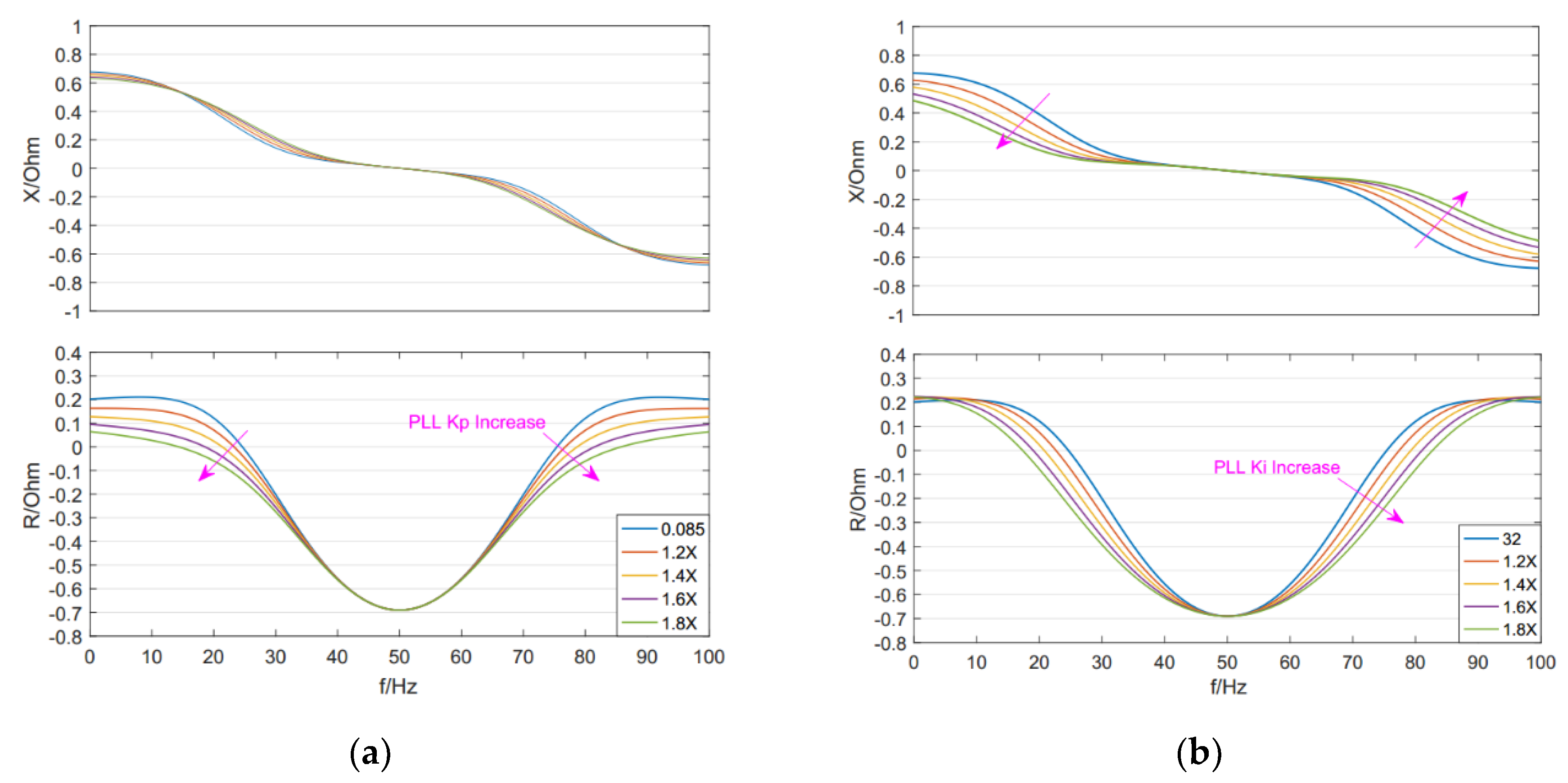
3.3.3. Impedance Sensitivity of PLL Parameters
3.3.4. Impedance Sensitivity of Current Controller Parameters
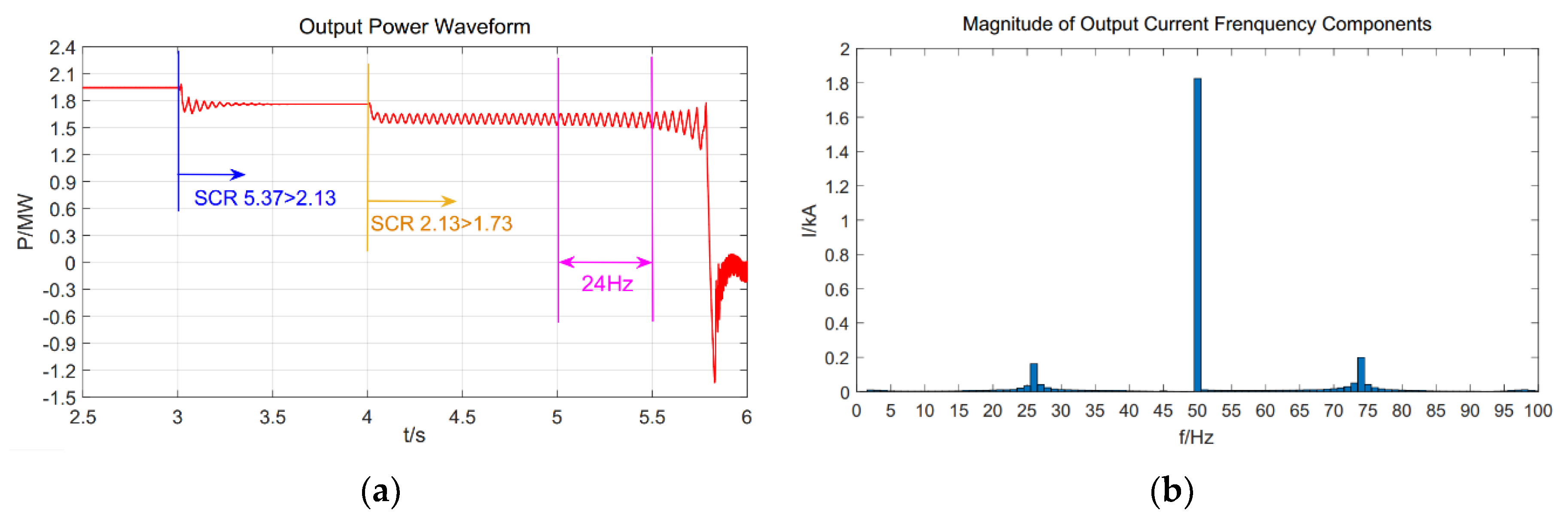
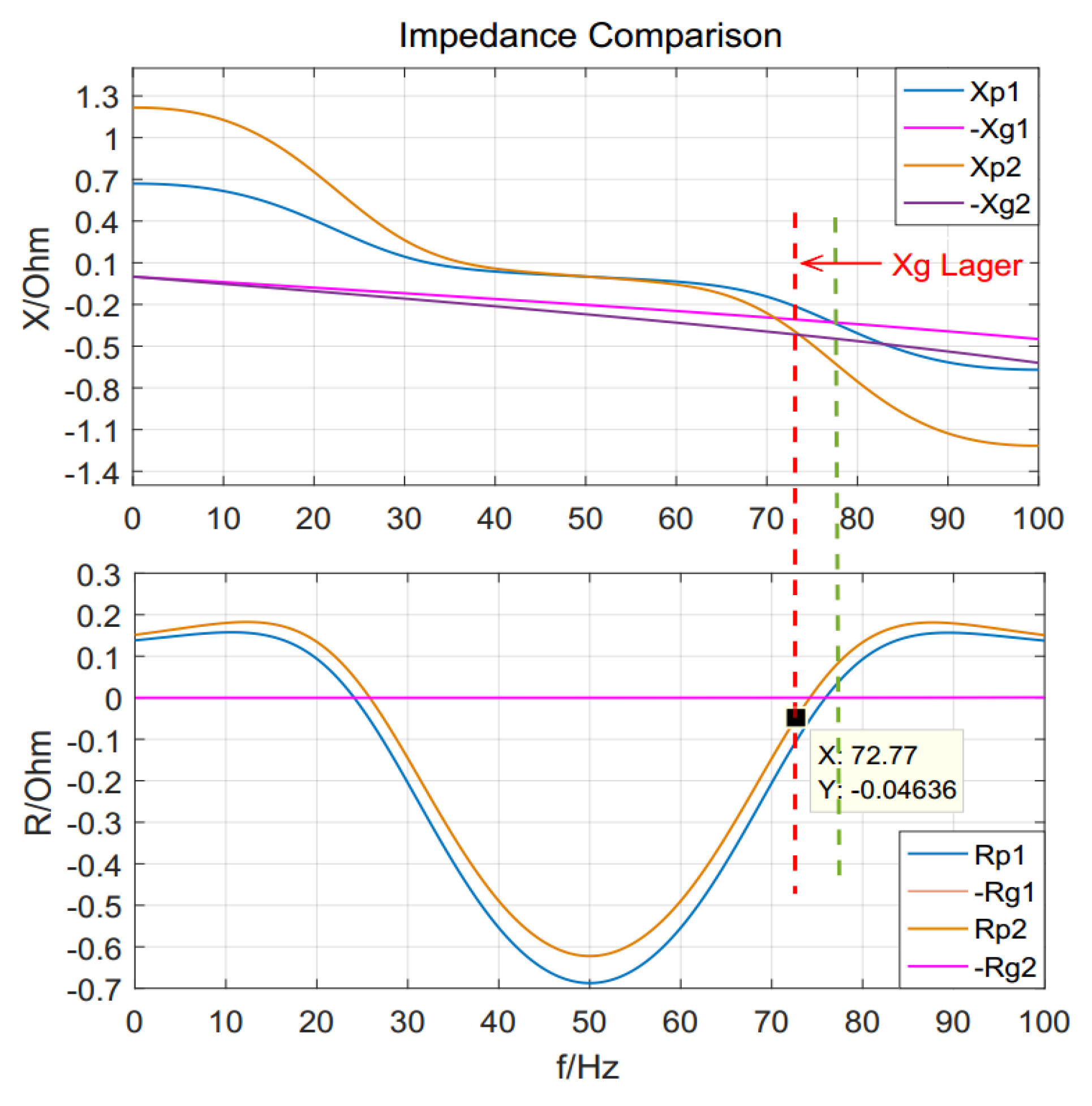
3.2. SSO Simulation and Theoretical Explanation
4. Discussion
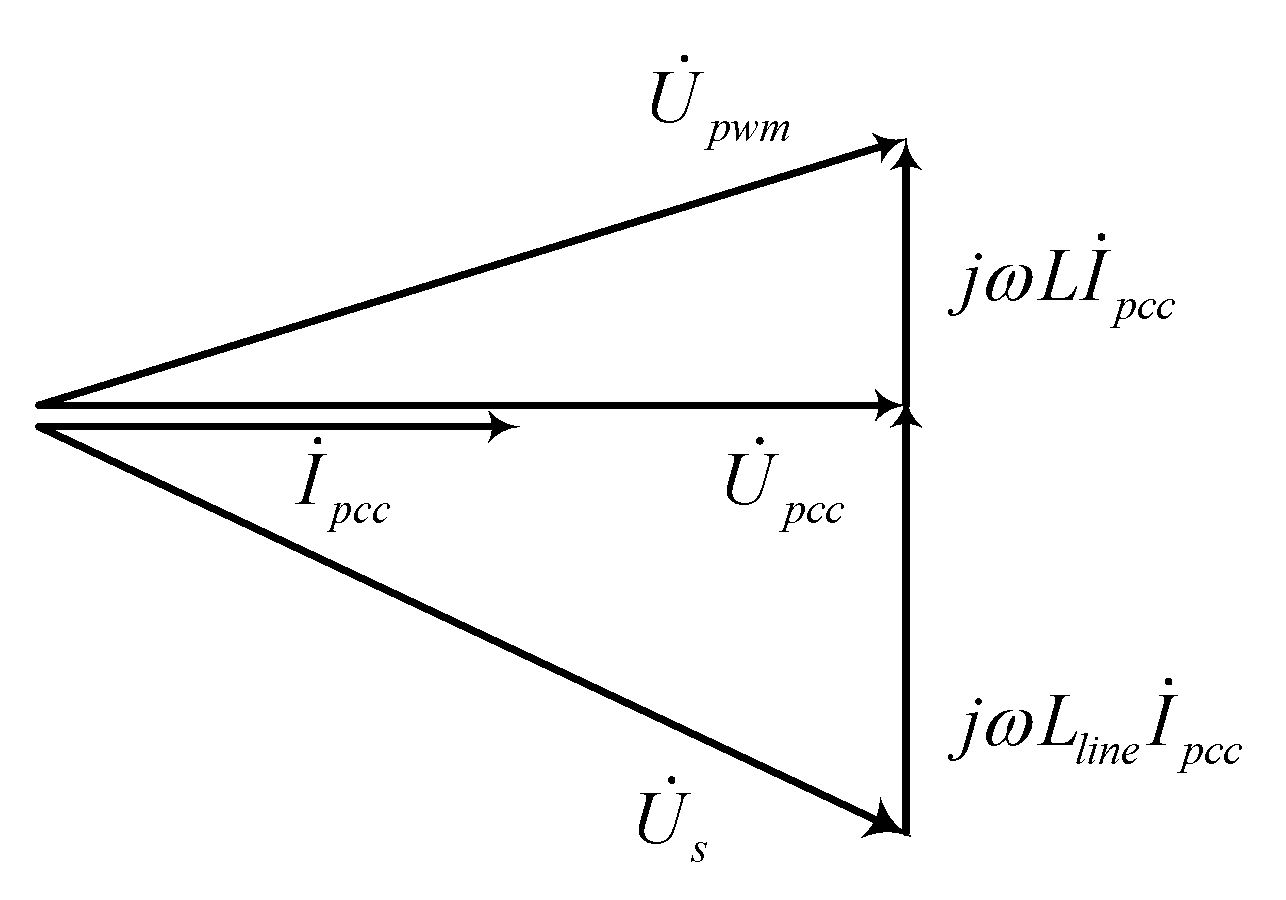
- The D-PMSG’s equivalent inductance XPMSG is positive at subsynchronous frequency while negative (capacitive) at supsynchronous frequency, which means the resonance between D-PMSG and weak grid occurs at the supsynchronous frequency. The relationship of coupled sub/supsynchronous currents could be quantitatively calculated.
- The D-PMSG’s impedance is sensitive to the PCC voltage and output current, which are decided by power flow. Further proof that when the output current is relatively small as a result of low wind speed, it is very likely to observe oscillations in this system. The influence of control parameters is also discussed. No obvious impact of current controller is found.
- A simulation experiment was conducted to study the mechanism of SSO when SCR decreases. Both simulation results and theoretical analysis proved that when the grid side impedance increases, the grid-connected D-PMSG system will be more unstable.
Author Contributions
Funding
Conflicts of Interest
Appendix A
References
- Jiao, R.; Huang, X.; Ma, X.; Han, L.; Tian, W. A model combining stacked auto encoder and back propagation algorithm for short-term wind power forecasting. IEEE Access 2018, 6, 17851–17858. [Google Scholar] [CrossRef]
- Wu, X.; Ning, W.; Yin, T.; Yang, X.; Tang, Z. Robust design method for the SSDC of a DFIG based on the practical small-signal stability region considering multiple uncertainties. IEEE Access 2018, 6, 16696–16703. [Google Scholar] [CrossRef]
- Kunjumuhammed, L.; Pal, B.C.; Gupta, R.; Dyke, K.J. Stability analysis of a PMSG-based large offshore wind farm connected to a VSC-HVDC. IEEE Trans. Energy Convers. 2017, 32, 1166–1176. [Google Scholar] [CrossRef]
- Fan, L.; Miao, Z. Mitigating SSR using DFIG-based wind generation. IEEE Trans. Sustain. Energy 2012, 3, 349–358. [Google Scholar] [CrossRef]
- Liu, H.K.; Xie, X.; Zhang, C.; Li, Y.; Liu, H.; Hu, Y. Quantitative SSR analysis of series-compensated DFIG-based wind farms using aggregated RLC circuit model. IEEE Trans. Power Syst. 2017, 32, 474–483. [Google Scholar] [CrossRef]
- IEEE Committee Report. Reader’s guide to subsynchronous resonance. IEEE Trans. Power Syst. 1992, 7, 150–157. [Google Scholar] [CrossRef]
- Irwin, G.; Jindal, A.; Isaacs, A. Subsynchronous control interactions between type 3 wind turbines and series compensated AC transmission systems. In Proceedings of the 2011 IEEE Power and Energy Society General Meeting, San Diego, CA, USA, 24–29 July 2011; IEEE: Detroit, MI, USA, 2017; pp. 1–6. [Google Scholar]
- Badrzadeh, B.; Sahni, M.; Zhou, Y.; Muthumuni, D.; Gole, A. General Methodology for Analysis of Sub-Synchronous Interaction in Wind Power Plants. IEEE Trans. Power Syst. 2013, 28, 1858–1869. [Google Scholar] [CrossRef]
- Huang, Y.; Yuan, X.; Hu, J. Effect of reactive power control on stability of DC-link voltage control in VSC connected to weak grid. In Proceedings of the 2014 IEEE PES General Meeting, National Harbor, MD, USA, 27–31 July 2014; pp. 1–5. [Google Scholar]
- Liu, Z.; Liu, B.; Duan, S.; Kang, Y. A novel DC capacitor voltage balance control method for cascade multilevel STATCOM. IEEE Trans. Power Electron. 2012, 27, 14–27. [Google Scholar] [CrossRef]
- Cheng, Y.; Sahni, M.; Muthumuni, D.; Badrzadeh, B. Reactance scan crossover-based approach for investigating SSCI concerns for DFIG-based wind turbines. IEEE Trans. Power Deliv. 2013, 28, 742–751. [Google Scholar] [CrossRef]
- Liu, H.; Xie, X.; He, J.; Xu, T.; Yu, Z.; Wang, C. Subsynchronous interaction between direct-drive PMSG based wind farms and weak AC networks. IEEE Trans. Power Syst. 2017, 32, 4708–4720. [Google Scholar] [CrossRef]
- Liu, H.; Xie, X.; Liu, W. An oscillatory stability criterion based on the unified dq-frame impedance network model for power systems with high-penetration renewables. IEEE Trans. Power Syst. 2018, 33, 3472–3485. [Google Scholar] [CrossRef]
- Jian, S. AC power electronic systems: Stability and power quality. In Proceedings of the 2008 11th Workshop on Control and Modeling for Power Electronics, Zurich, Switzerland, 17–20 August 2008. [Google Scholar]
- Jian, S. Small-signal methods for ac distributed power systems—A Review. IEEE Trans. Power Electron. 2009, 24, 2545–2554. [Google Scholar] [CrossRef]
- Jian, S.; Bing, Z.; Karimi, K.J. Input impedance modeling of multi-pulse rectifiers by harmonic linearization. IEEE Trans. Power Electron. 2009, 24, 2812–2820. [Google Scholar] [CrossRef]
- Rygg, A.; Molinas, M.; Zhang, C.; Cai, X. A modified sequence-domain impedance definition and its equivalence to the dq-domain impedance definition for the stability analysis of ac power electronic systems. IEEE J. Emerg. Sel. Top. Power Electron. 2016, 4, 1383–1396. [Google Scholar] [CrossRef]
- Xie, X.; Liu, H.K.; He, J.; Zhang, C.; Qiao, Y. Mechanism and Characteristics of Subsynchronous Oscillation Caused by the Interaction between Full-converter Wind Turbines and AC Systems. Proc. CSEE 2016, 36, 2366–2372. (In Chinese) [Google Scholar]
- Cesp, M.; Jian, S. Impedance Modeling and Analysis of Grid-Connected Voltage-Source Converters. IEEE Trans. Power Electron. 2014, 29, 1254–1261. [Google Scholar]
- Wang, Y.; Chen, X.; Chen, J.; Gong, C. Analysis of Positive-sequence and Negative-sequence Impedance Modeling of Three-phase LCL-type Grid-connected Inverters Based on Harmonic Linearization. Proc. CSEE 2016, 36, 5890–5898. (In Chinese) [Google Scholar]
- Zhang, C.; Wang, W.S.; He, G.; Li, G.; Wang, H.; Tian, Y.Y. Analysis of Sub-Synchronous Oscillation of Full-converter Wind Farm Based on Sequence Impedance and An Optimized Design Method for PLL Parameters. Proc. CSEE 2017, 37, 6757–6767. (In Chinese) [Google Scholar]
- Zhang, M.Y.; Xiao, S.W.; Tian, T.; Zhang, H.H.; Bi, T.S.; Liang, F.B. Analysis of SSO Influencing Factors and Parameter Adjustment for Grid-Connected Full-Converter Wind Farm Based on Impedance Sensitivity. Power Syst. Technol. 2018, 42, 2768–2777. (In Chinese) [Google Scholar]
- Wen, B.; Boroyevich, D.; Burgos, R.; Mattavelli, P.; Shen, Z. Analysis of d-q small-signal impedance of grid-tied inverters. IEEE Trans. Power Electron. 2015, 31, 675–687. [Google Scholar] [CrossRef]
- Shah, S.; Parsa, L. Impedance Modeling of Three-Phase Voltage Source Converters in DQ, Sequence, and Phasor Domains. IEEE Trans. Energy Convers. 2017, 32, 1139–1150. [Google Scholar] [CrossRef]
- Vieto, I.; Du, X.; Nian, H.; Jian, S. Frequency-domain coupling in two-level VSC small-signal dynamics. In Proceedings of the 2017 IEEE 18th Workshop on Control and Modeling for Power Electronics (COMPEL), Stanford, CA, USA, 9–12 July 2017. [Google Scholar]
- Zhao, M.Q.; Yuan, X.M.; Hu, J.B.; Yan, Y.B. Voltage dynamics of current control time-scale in a VSC-connected weak grid. IEEE Trans. Power Syst. 2016, 31, 2925–2937. [Google Scholar] [CrossRef]
- Xin, H.; Dong, W.; Yuan, X.M. Generalized short circuit ratio for multi power electronic based devices infeed to power systems. Proc. CSEE 2016, 36, 6013–6027. (In Chinese) [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ia [f], Ib [f], Ic [f] | T(θ1) | Id[f], Iq[f] |
|---|---|---|
| f1 | fp | f1− fp |
| 2f1 − fp | fp − f1 | |
| fp | f1 | fp − f1 |
| 2f1− fp | f1 | f1− fp |
| Symbol | Item | Value |
|---|---|---|
| Vs | System Voltage | 0.82 kV (L-L, RMS) |
| Lg | Lg1: Before 3 s | 0.2 mH |
| Lg2: 3~4 s | 0.495 mH | |
| Lg3: After 4 s | 0.62 mH | |
| Rf | Filter resistance | 0.02 Ω |
| Cf | Filter capacitance | 500 μF |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yuan, S.; Hao, Z.; Zhang, T.; Yuan, X.; Shu, J. Impedance Modeling Based Method for Sub/Supsynchronous Oscillation Analysis of D-PMSG Wind Farm. Appl. Sci. 2019, 9, 2831. https://doi.org/10.3390/app9142831
Yuan S, Hao Z, Zhang T, Yuan X, Shu J. Impedance Modeling Based Method for Sub/Supsynchronous Oscillation Analysis of D-PMSG Wind Farm. Applied Sciences. 2019; 9(14):2831. https://doi.org/10.3390/app9142831
Chicago/Turabian StyleYuan, Saijun, Zhiguo Hao, Tao Zhang, Xiaotian Yuan, and Jin Shu. 2019. "Impedance Modeling Based Method for Sub/Supsynchronous Oscillation Analysis of D-PMSG Wind Farm" Applied Sciences 9, no. 14: 2831. https://doi.org/10.3390/app9142831
APA StyleYuan, S., Hao, Z., Zhang, T., Yuan, X., & Shu, J. (2019). Impedance Modeling Based Method for Sub/Supsynchronous Oscillation Analysis of D-PMSG Wind Farm. Applied Sciences, 9(14), 2831. https://doi.org/10.3390/app9142831