Convergence Gain in Compressive Deconvolution: Application to Medical Ultrasound Imaging


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- Based on the iterative scheme of the strictly semi-proximal Peaceman–Rechard splitting method, we present an ICD method that will reduce the number of iterations while only involving additional dual update (i.e., ) and requiring almost the same computational effort for each iteration.
- We prove that the ICD method will converge under mild conditions, while the convergence analysis is not given in the previous CD method.
- We introduce some elaborate manipulations that can directly generalize the CD method to more general scenarios with a non-orthogonal sparse basis .
2. Method
2.1. Preliminaries
2.1.1. Variational Reformulation of Equation (4)
2.1.2. Notations
2.2. Algorithm
2.3. Global Convergence
3. Numerical Results
3.1. Numerical Simulations
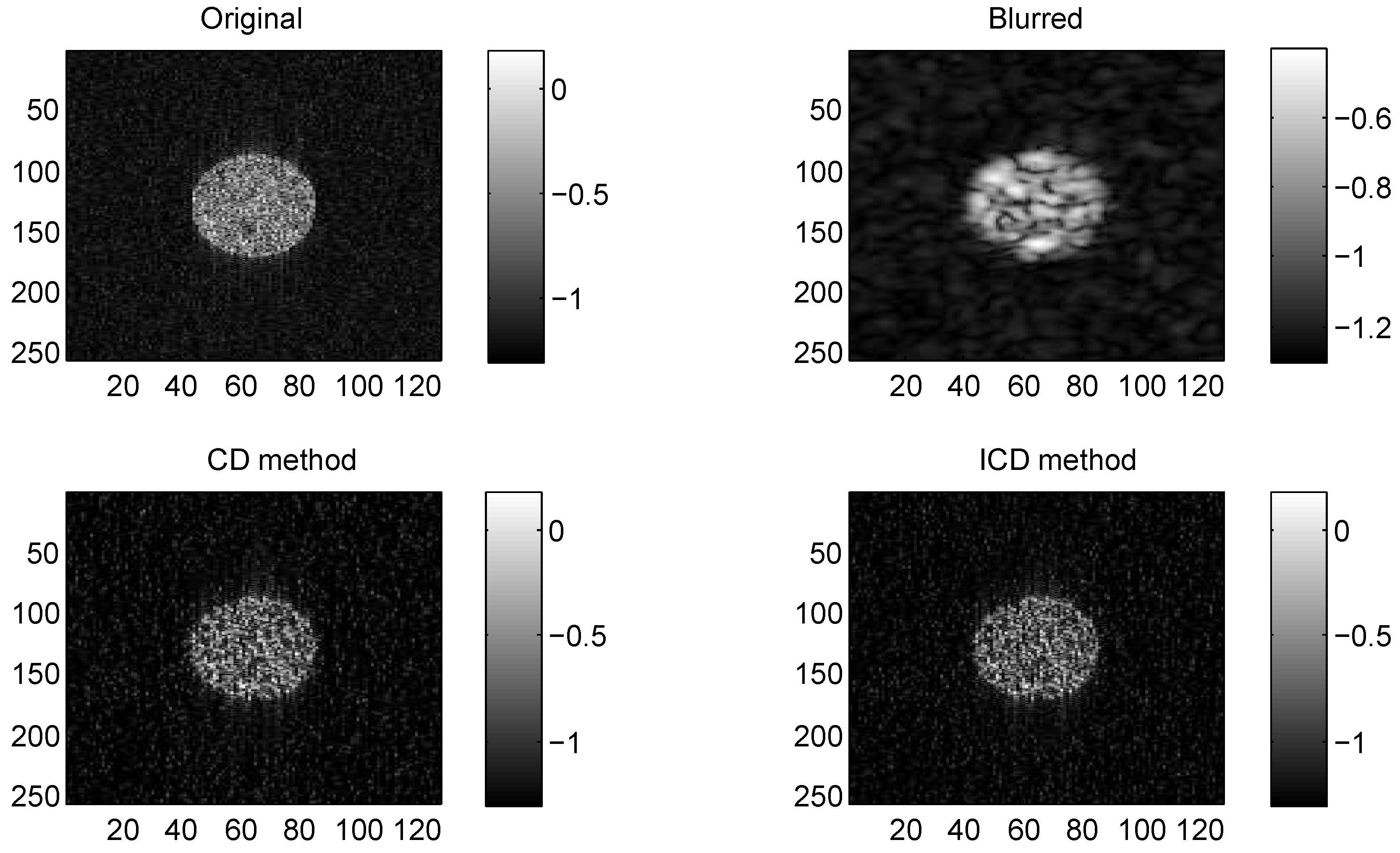
3.1.1. Simulated US Images
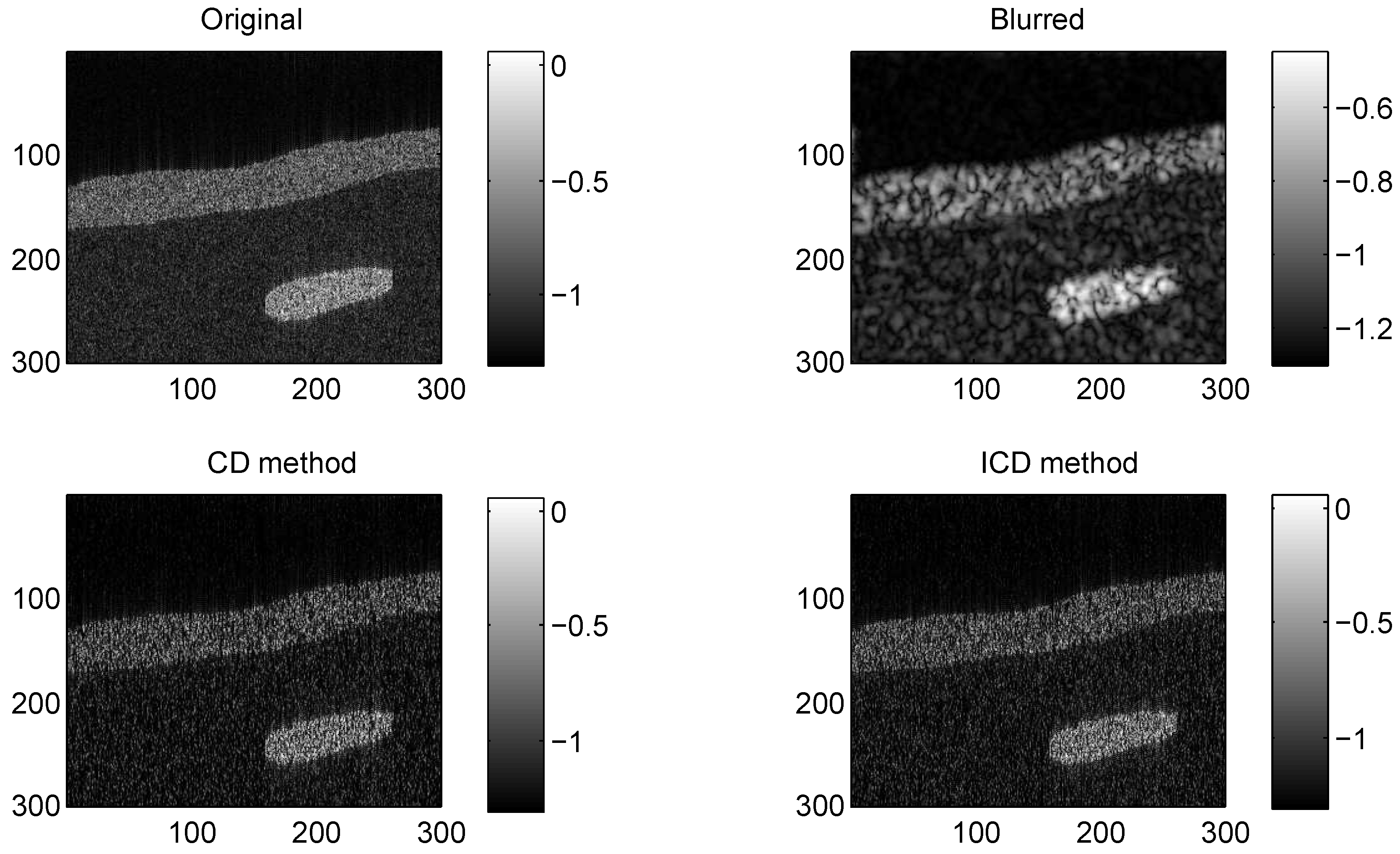
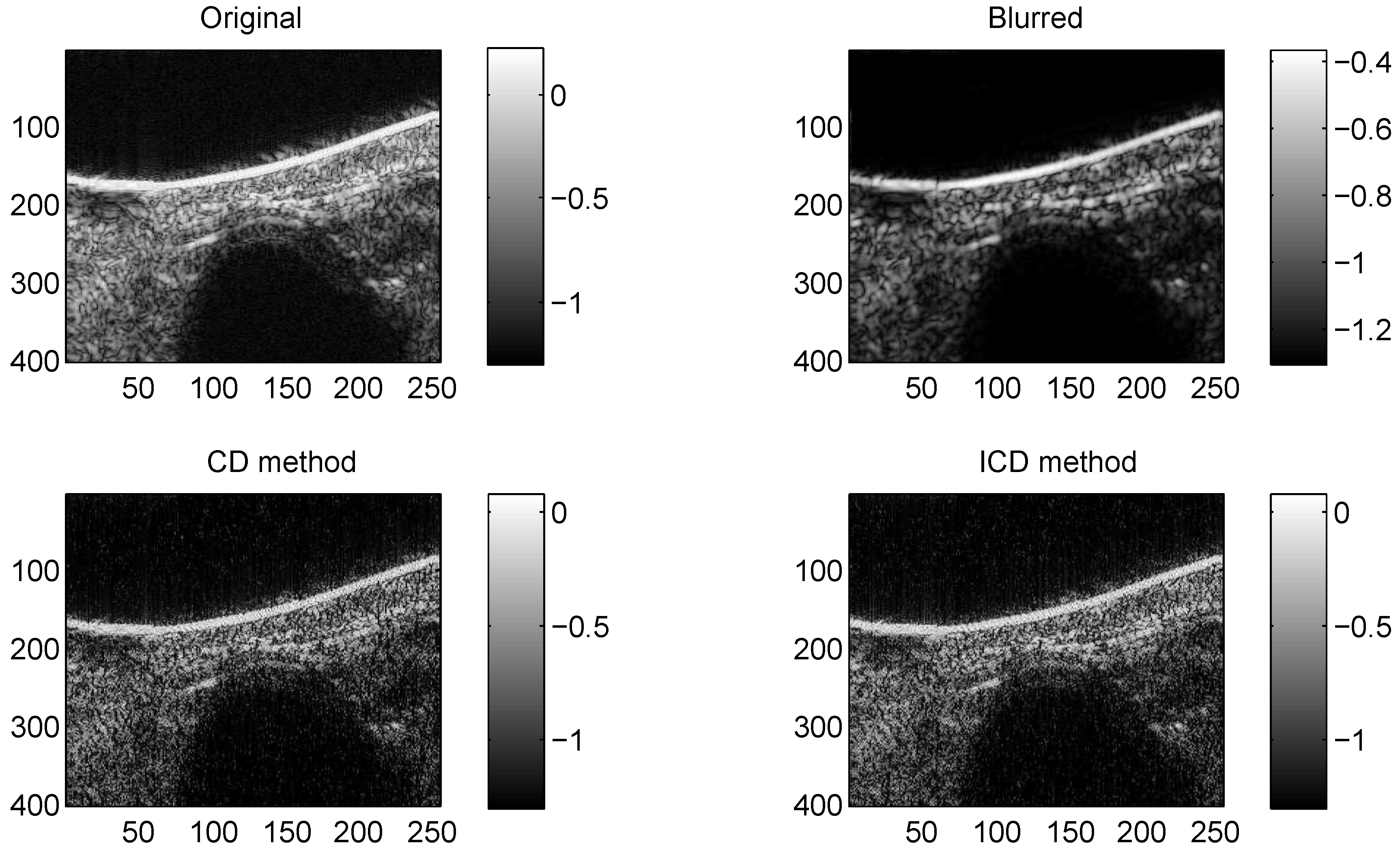
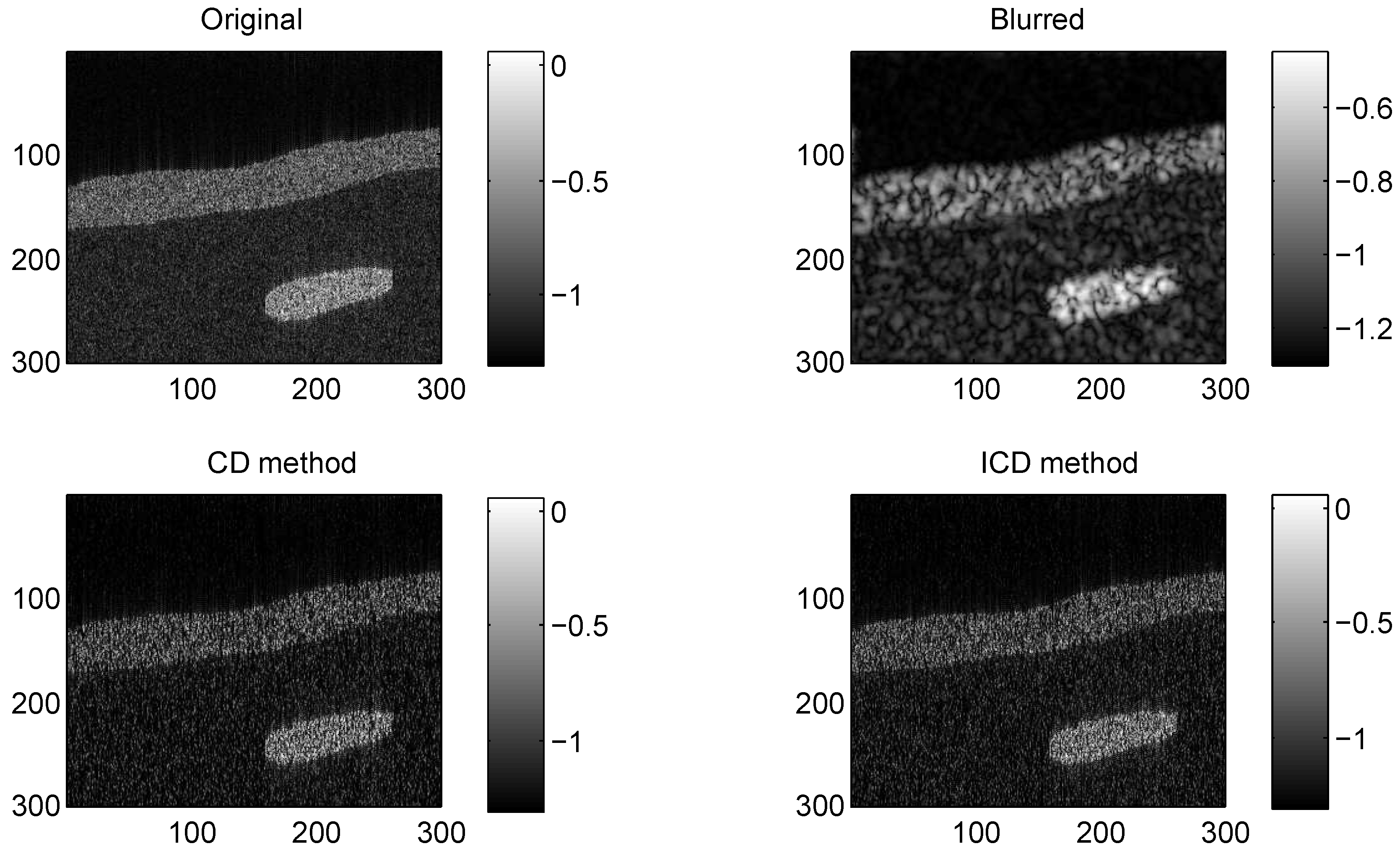
3.1.2. In Vivo US Images
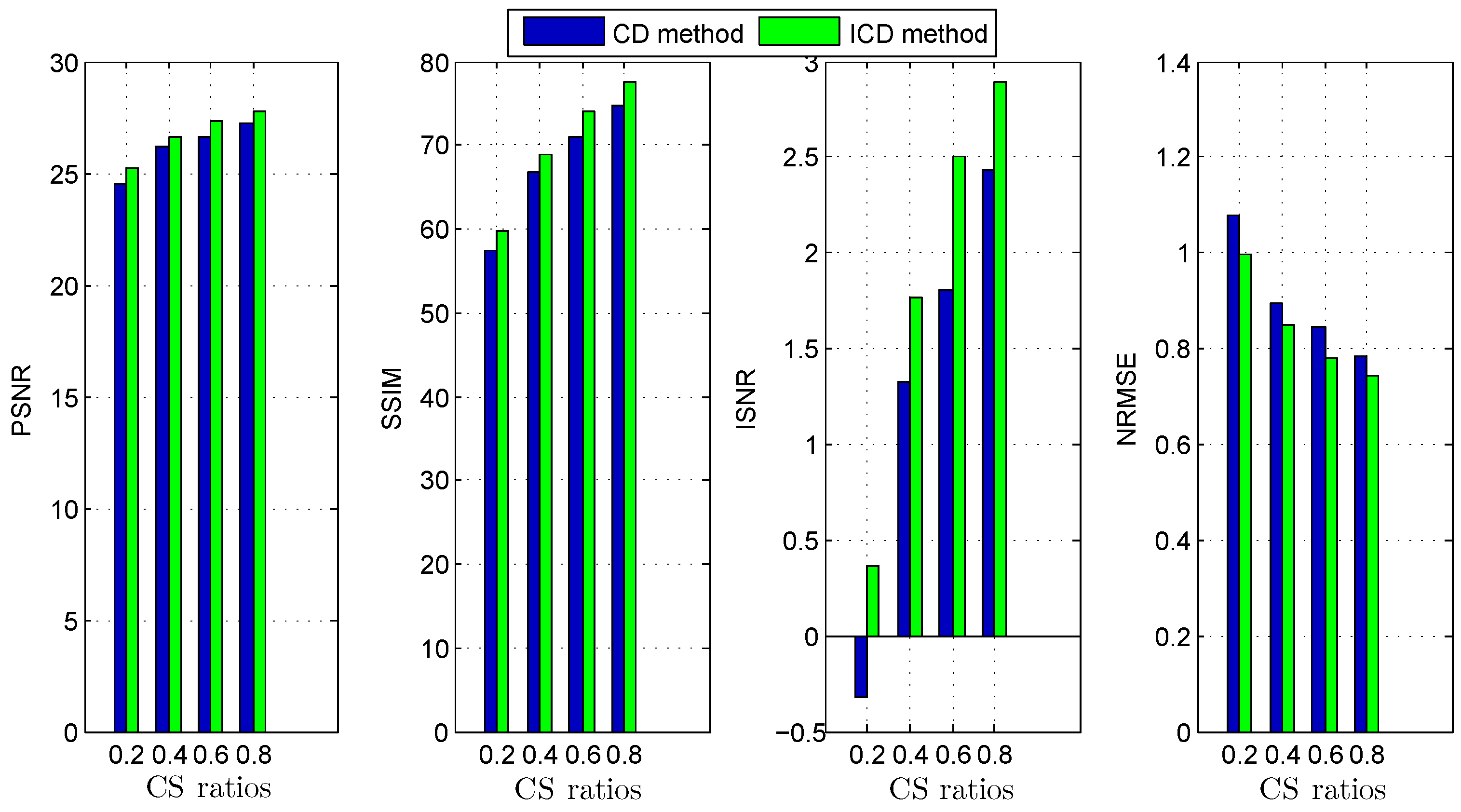
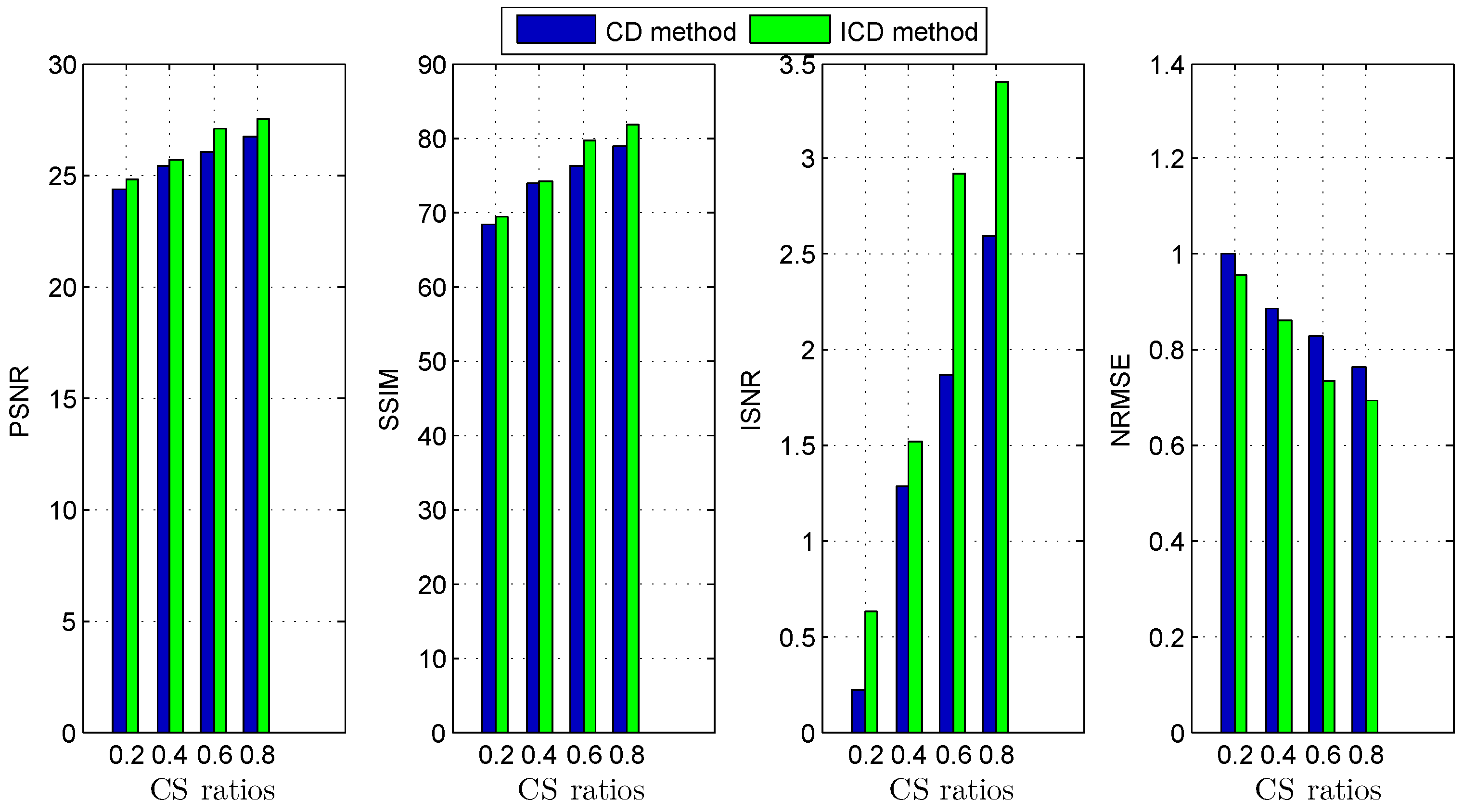
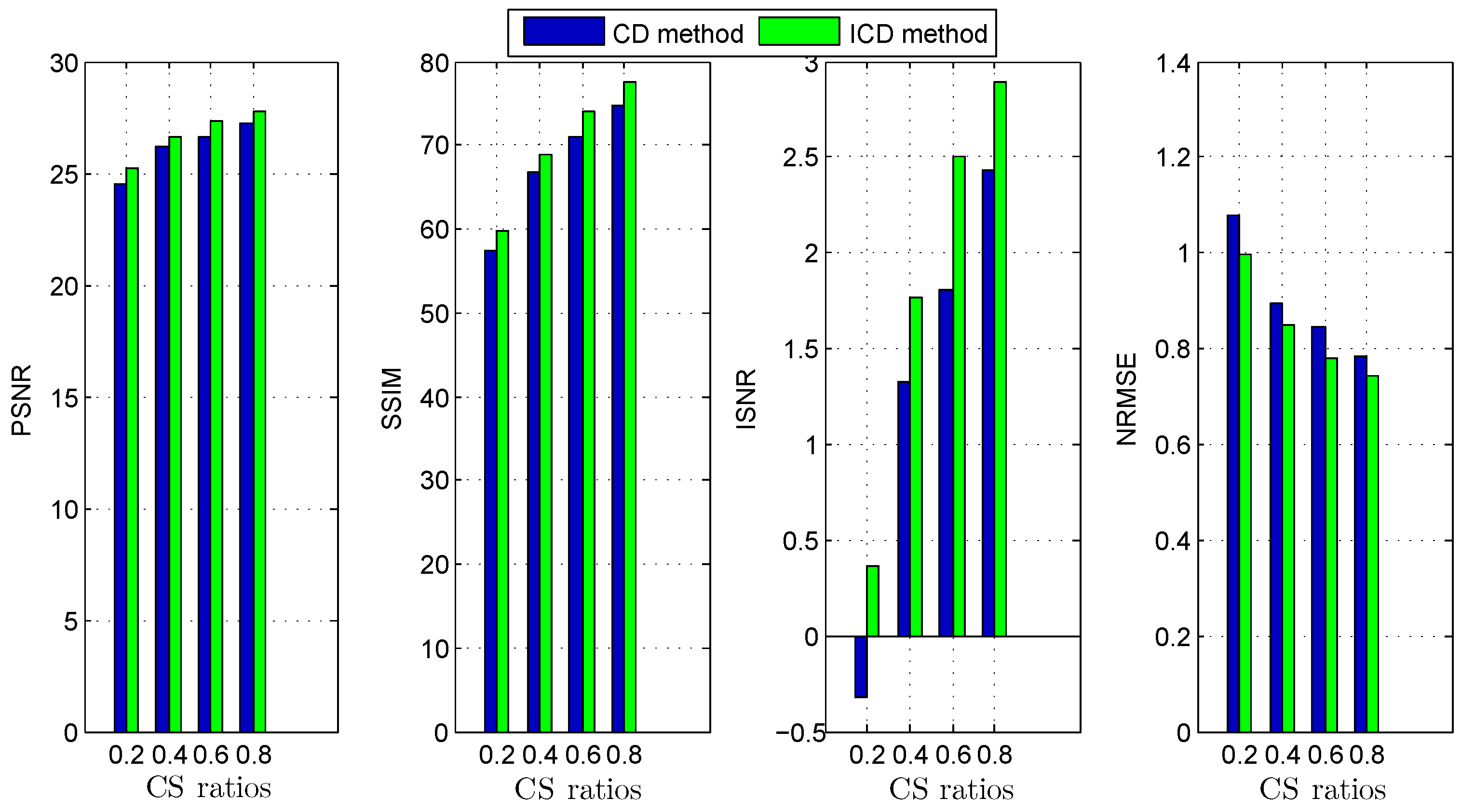
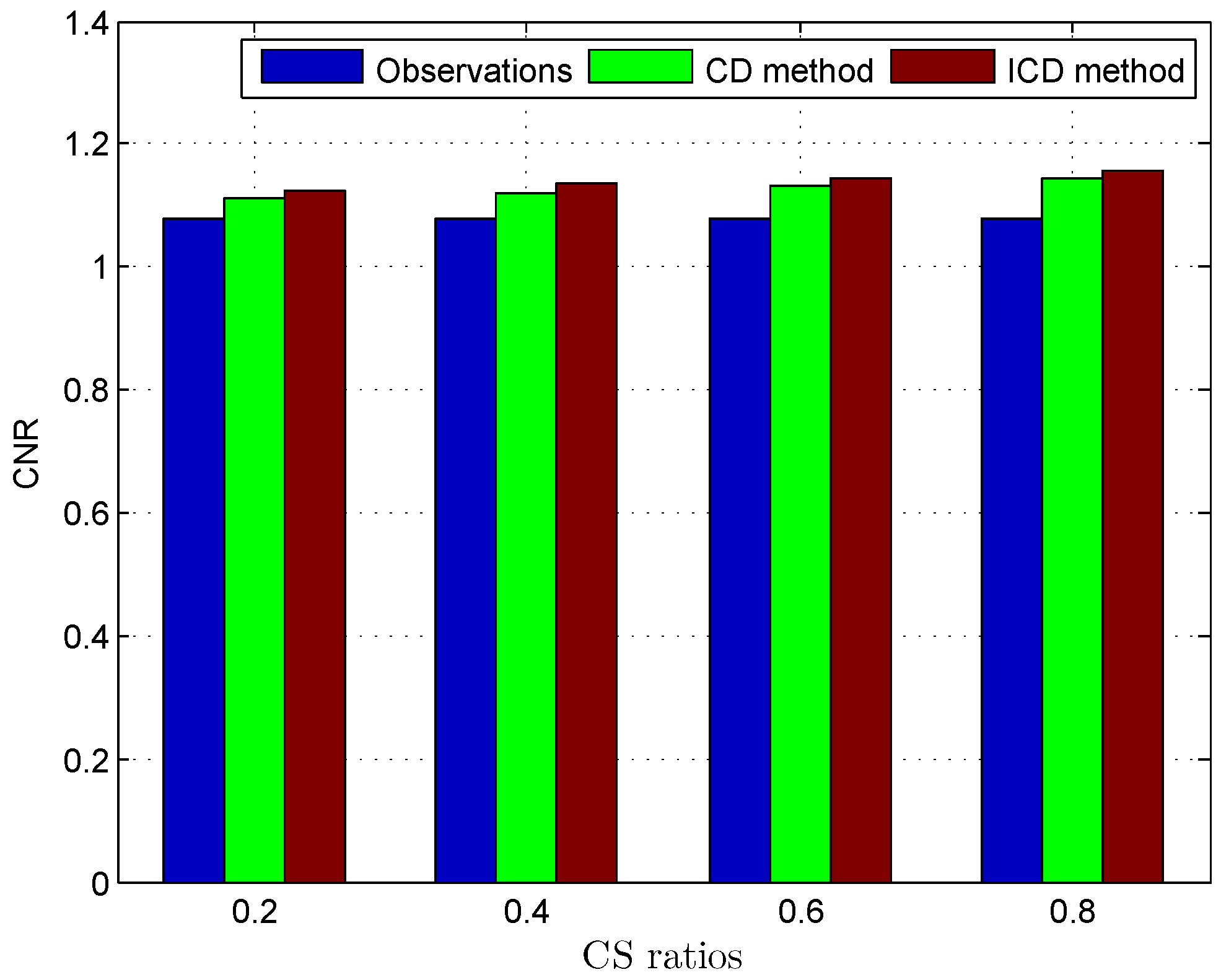
3.2. Results
4. Discussions and Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A. Proof of the Equivalence of Equations (25a) and (6a)–(6b)
Appendix B. Proof of Theorem 1
References
- Lorintiu, O.; Liebgott, H.; Alessandrini, M.; Bernard, O.; Friboulet, D. Compressed sensing reconstruction of 3d ultrasound data using dictionary learning and line-wise subsampling. IEEE Trans. Med Imaging 2015, 34, 2467–2477. [Google Scholar] [CrossRef] [PubMed]
- Candès, E.J.; Romberg, J.; Tao, T. Robust uncertainty principles: Exact signal reconstruction from highly incomplete frequency information. IEEE Trans. Inf. Theory 2006, 52, 489–509. [Google Scholar] [CrossRef]
- Donoho, D.L. Compressed sensing. IEEE Trans. Inf. Theory 2006, 52, 1289–1306. [Google Scholar] [CrossRef]
- Yang, M.; Sampson, R.; Wei, S.; Wenisch, T.F.; Chakrabarti, C. Separable beamforming for 3-d medical ultrasound imaging. IEEE Trans. Signal Process. 2015, 63, 279–290. [Google Scholar] [CrossRef]
- Richy, J.; Friboulet, D.; Bernard, A.; Bernard, O.; Liebgott, H. Blood velocity estimation using compressive sensing. IEEE Trans. Med Imaging 2013, 32, 1979–1988. [Google Scholar] [CrossRef] [PubMed]
- Amizic, B.; Spinoulas, L.; Molina, R.; Katsaggelos, A.K. Compressive blind image deconvolution. IEEE Trans. Image Process. 2013, 22, 3994–4006. [Google Scholar] [CrossRef] [PubMed]
- Ma, J.; Le Dimet, F.-X. Deblurring from highly incomplete measurements for remote sensing. IEEE Trans. Geosci. Remote. Sens. 2009, 47, 792–802. [Google Scholar]
- Hojjatoleslami, M.A.S.A.; Podoleanu, A. Image quality improvement in optical coherence tomography using lucy crichardson deconvolution algorithm. Appl. Opt. 2013, 23, 5663–5670. [Google Scholar] [CrossRef] [PubMed]
- Xiao, L.; Shao, J.; Huang, L.; Wei, Z. Compounded regularization and fast algorithm for compressive sensing deconvolution. In Proceedings of the 2011 Sixth International Conference on Image and Graphics (ICIG), Hefei, China, 12–15 August 2011; pp. 616–621. [Google Scholar]
- Zhao, M.; Saligrama, V. On compressed blind de-convolution of filtered sparse processes. In Proceedings of the 2010 IEEE International Conference on Acoustics Speech and Signal Processing (ICASSP), Dallas, TX, USA, 14–19 March 2010; pp. 4038–4041. [Google Scholar]
- Yang, J.; Zhang, Y. Alternating direction algorithms for l1-problems in compressive sensing. SIAM J. Sci. Comput. 2011, 33, 250–278. [Google Scholar] [CrossRef]
- Chen, Z.; Basarab, A.; Kouame, D. Joint compressive sampling and deconvolution in ultrasound medical imaging. In Proceedings of the 2015 IEEE International Ultrasonics Symposium (IUS), Taipei, Taiwan, 21–24 October 2015; pp. 1–4. [Google Scholar]
- Chen, Z.; Basarab, A.; Kouame, D. Compressive deconvolution in medical ultrasound imaging. IEEE Trans. Med Imaging 2016, 35, 728–737. [Google Scholar] [CrossRef] [PubMed]
- Pesquet, J.-C.; Pustelnik, N. A parallel inertial proximal optimization method. Pac. J. Optim. 2012, 8, 273–305. [Google Scholar]
- Chen, Z.; Basarab, A.; Kouame, D. Reconstruction of enhanced ultrasound images from compressed measurements using simultaneous direction method of multipliers. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2016, 63, 1525–1534. [Google Scholar] [CrossRef] [PubMed]
- Gao, B.; Ma, F. Symmetric alternating direction method with indefinite proximal regularization for linearly constrained convex optimization. J. Optim. Theory Appl. 2018, 176, 178–204. [Google Scholar] [CrossRef]
- He, B.; Yuan, X. On the o(1/n) convergence rate of the douglas-rachford alternating direction method. SIAM J. Numer. Anal. 2012, 50, 700–709. [Google Scholar] [CrossRef]
- Wang, Z.; Bovik, A.C.; Sheikh, H.R.; Simoncelli, E.P. Image quality assessment: From error visibility to structural similarity. IEEE Trans. Image Process. 2004, 13, 600–612. [Google Scholar] [CrossRef] [PubMed]
- Zhao, N.; Basarab, A.; Kouam, D.; Tourneret, J. Joint segmentation and deconvolution of ultrasound images using a hierarchical bayesian model based on generalized gaussian priors. IEEE Trans. Image Process. 2016, 25, 3736–3750. [Google Scholar] [CrossRef] [PubMed]
- Asl, B.M.; Mahloojifar, A. Eigenspace-based minimum variance beamforming applied to medical ultrasound imaging. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2010, 57, 2381–2390. [Google Scholar] [CrossRef] [PubMed]




© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, B.; Xiao, S.; Zhao, L.; Liu, X.; Pan, K. Convergence Gain in Compressive Deconvolution: Application to Medical Ultrasound Imaging. Appl. Sci. 2018, 8, 2558. https://doi.org/10.3390/app8122558
Gao B, Xiao S, Zhao L, Liu X, Pan K. Convergence Gain in Compressive Deconvolution: Application to Medical Ultrasound Imaging. Applied Sciences. 2018; 8(12):2558. https://doi.org/10.3390/app8122558
Chicago/Turabian StyleGao, Bin, Shaozhang Xiao, Li Zhao, Xian Liu, and Kegang Pan. 2018. "Convergence Gain in Compressive Deconvolution: Application to Medical Ultrasound Imaging" Applied Sciences 8, no. 12: 2558. https://doi.org/10.3390/app8122558
APA StyleGao, B., Xiao, S., Zhao, L., Liu, X., & Pan, K. (2018). Convergence Gain in Compressive Deconvolution: Application to Medical Ultrasound Imaging. Applied Sciences, 8(12), 2558. https://doi.org/10.3390/app8122558