Demodulation Technique Based on Laser Interference for Weak Photo-Acoustic Signals on Water Surface

Abstract
:1. Introduction
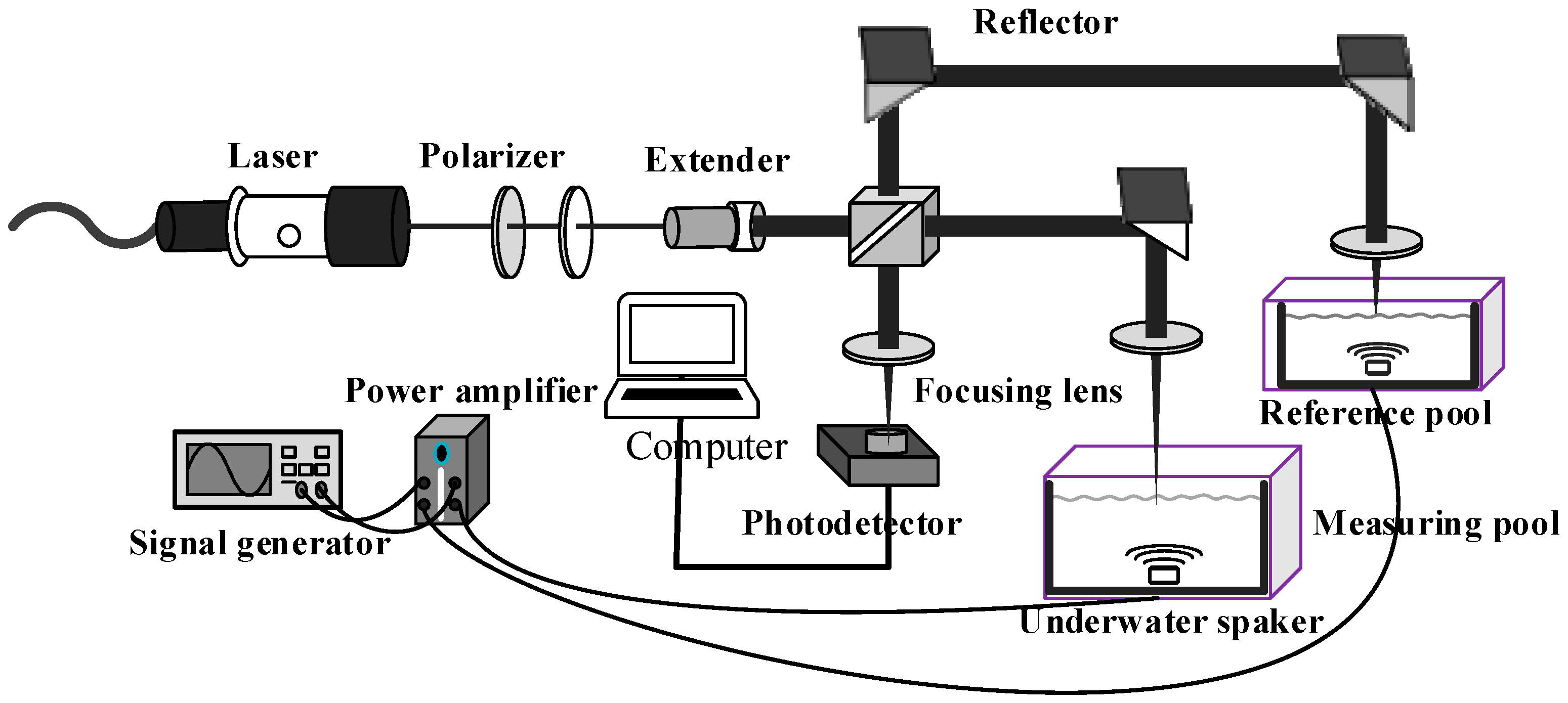
2. Materials and Methods
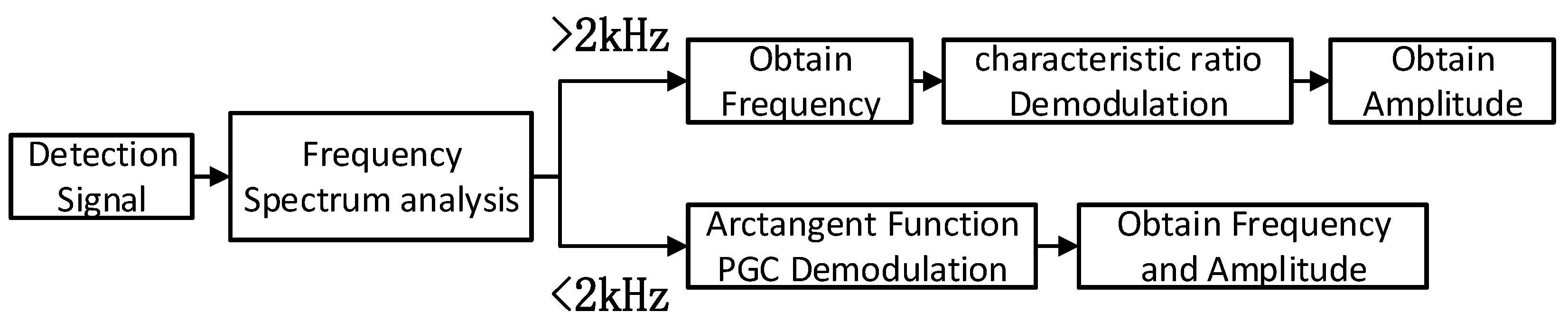
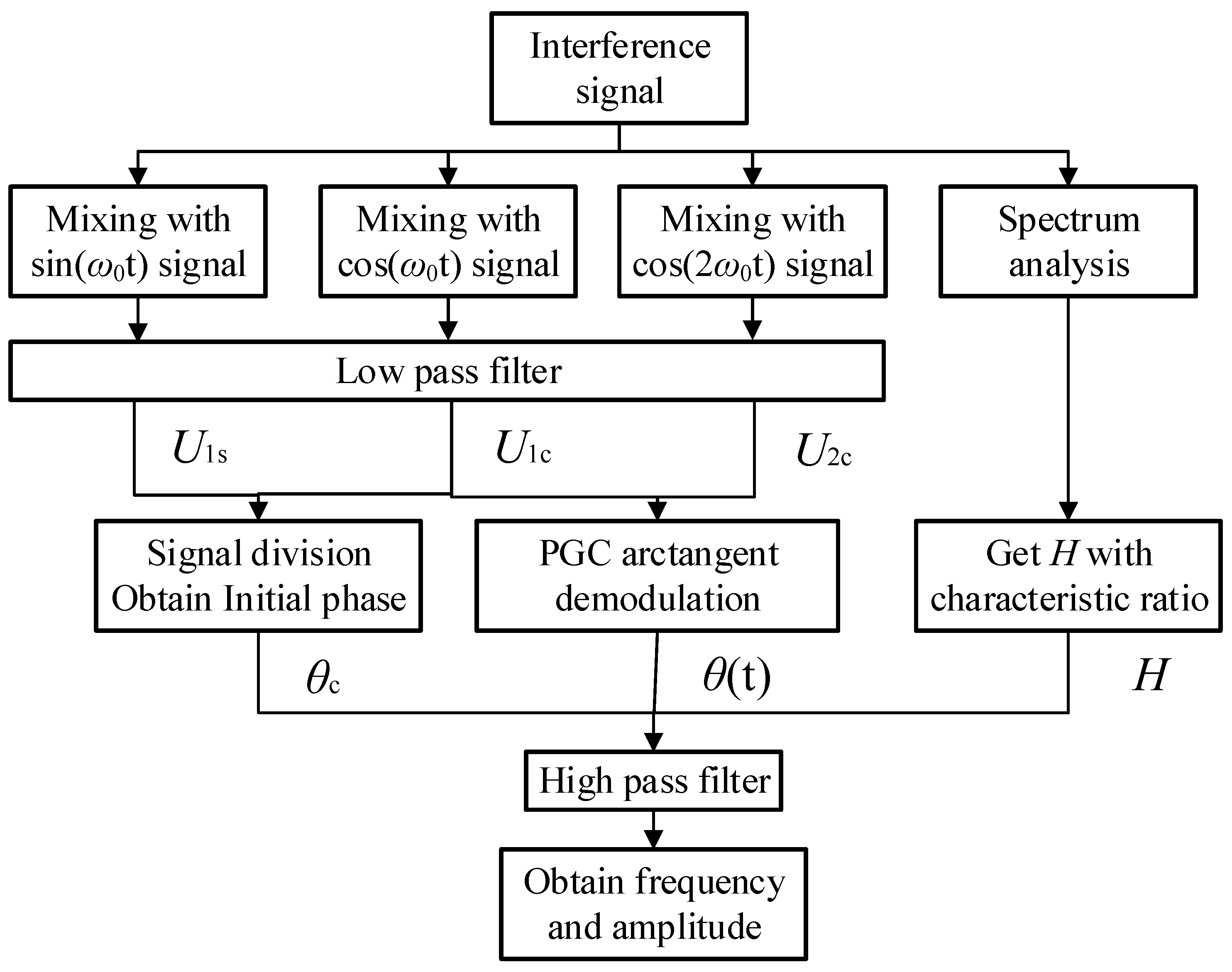
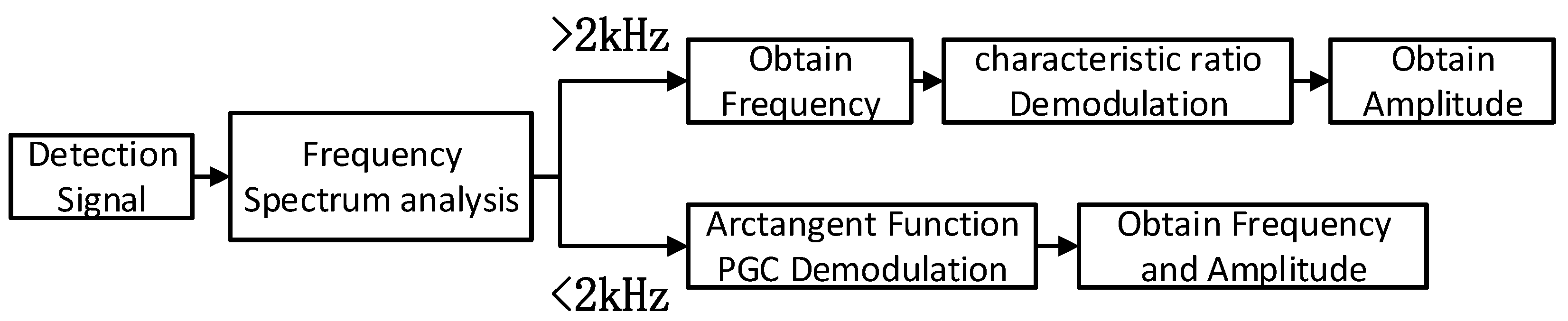
2.1. General Concept
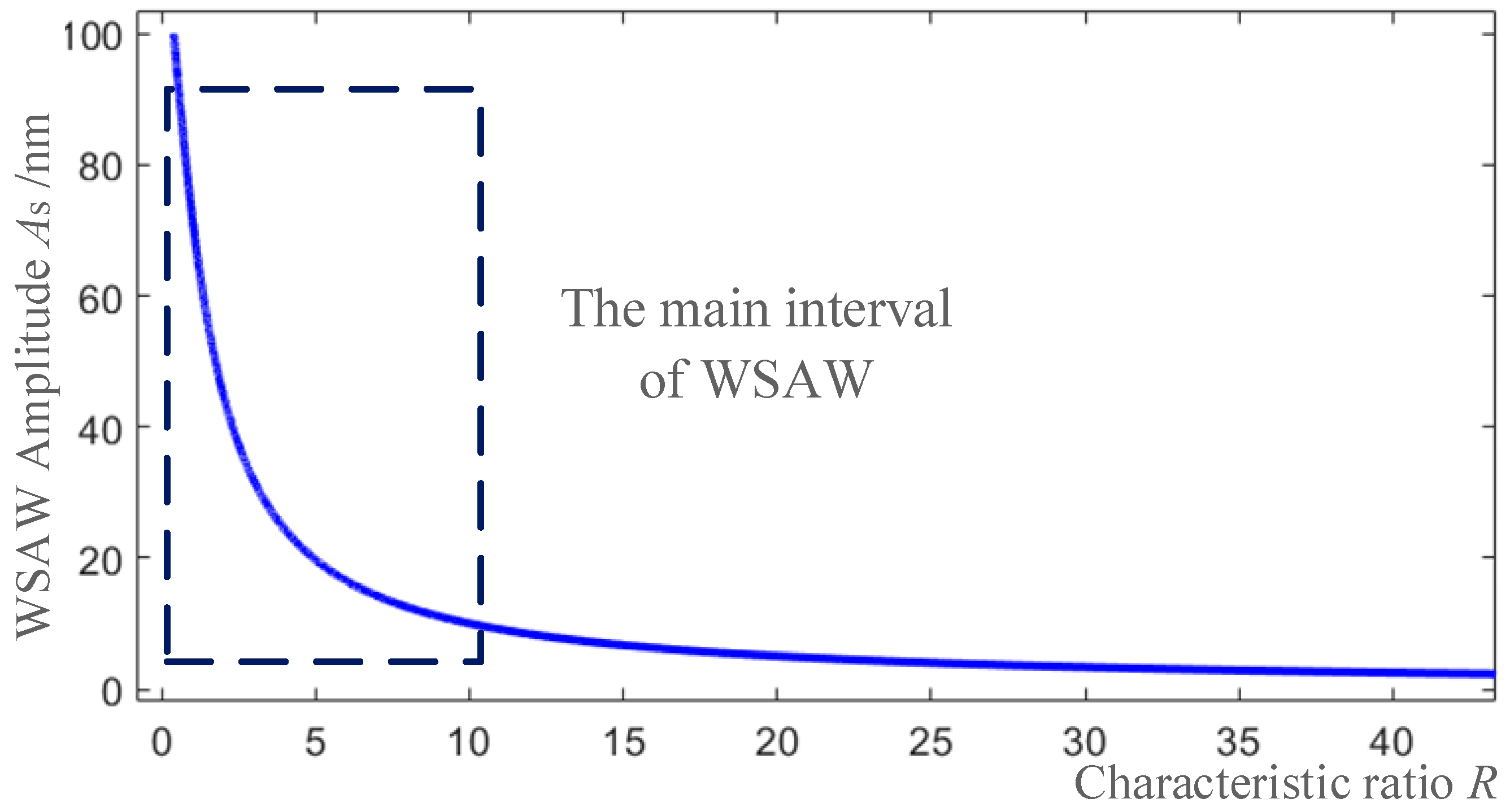
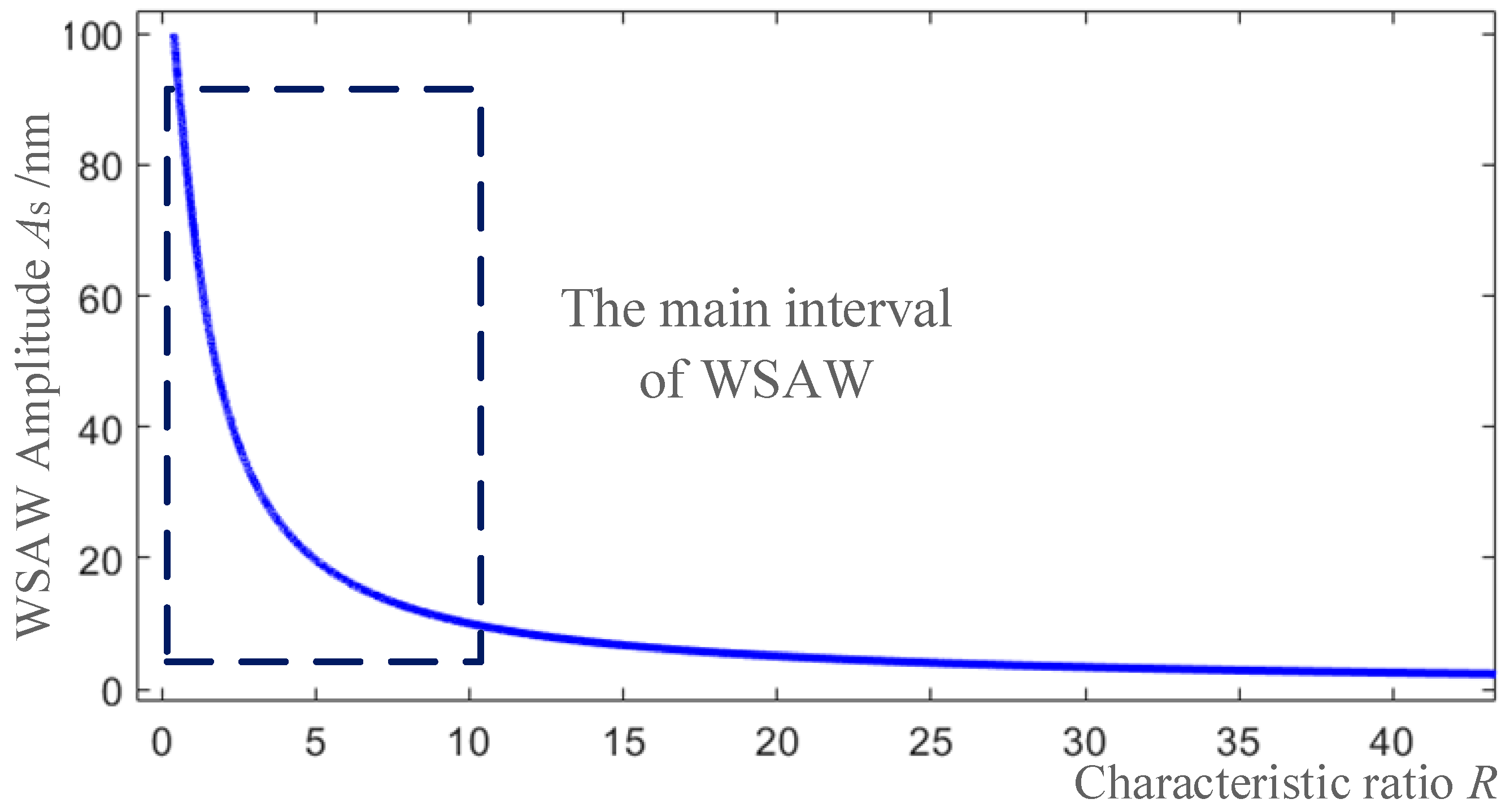
2.2. Characteristic Ratio Demodulation Algorithm
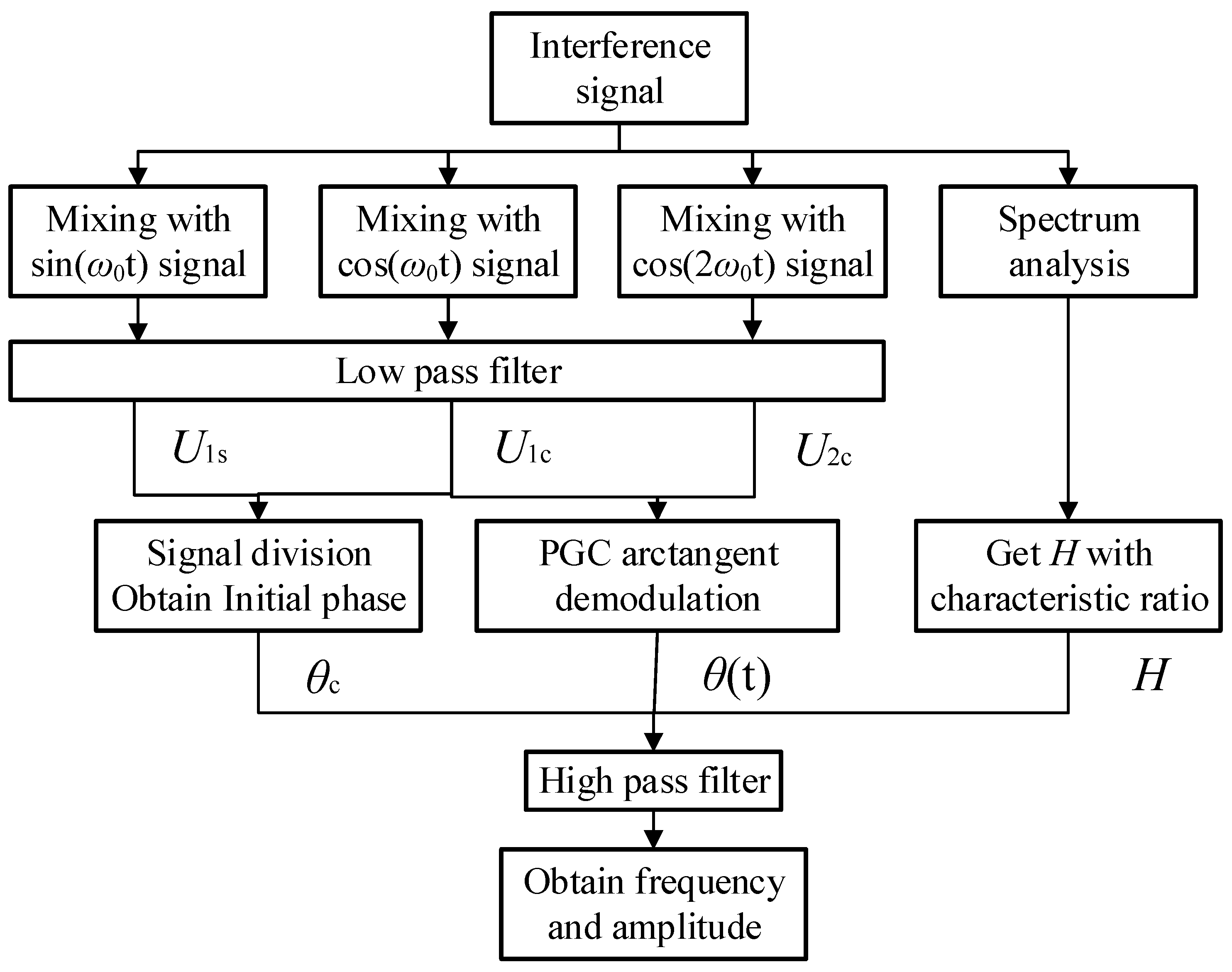
2.3. PGC-Based Improved Arc Tangent Demodulation Algorithm
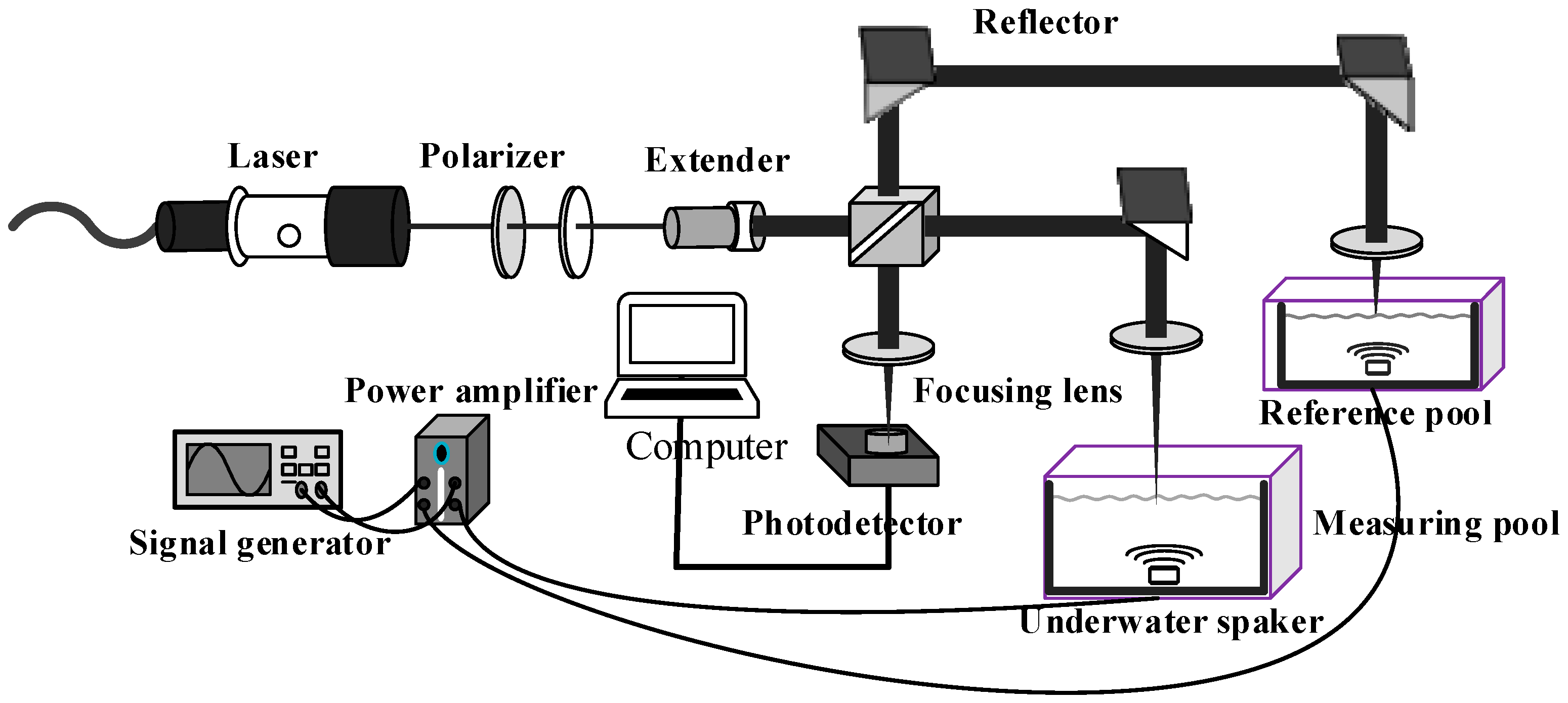
3. Results
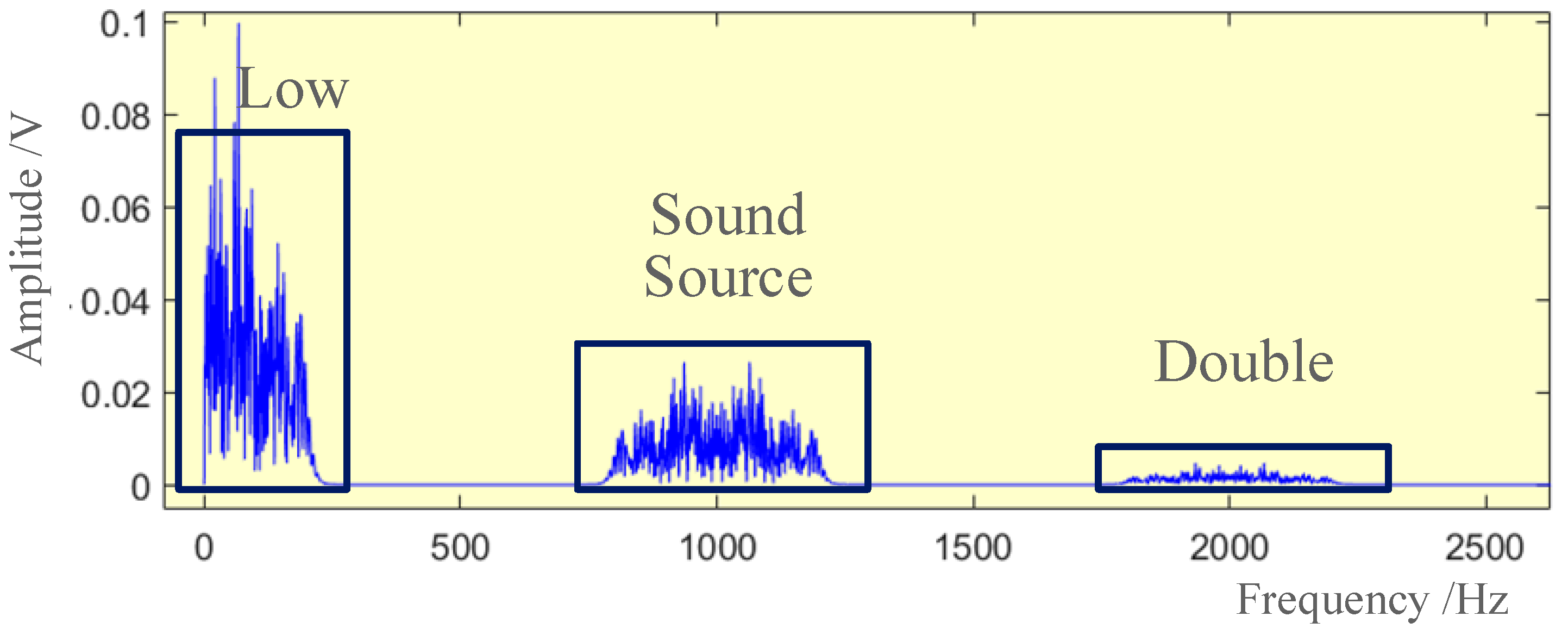
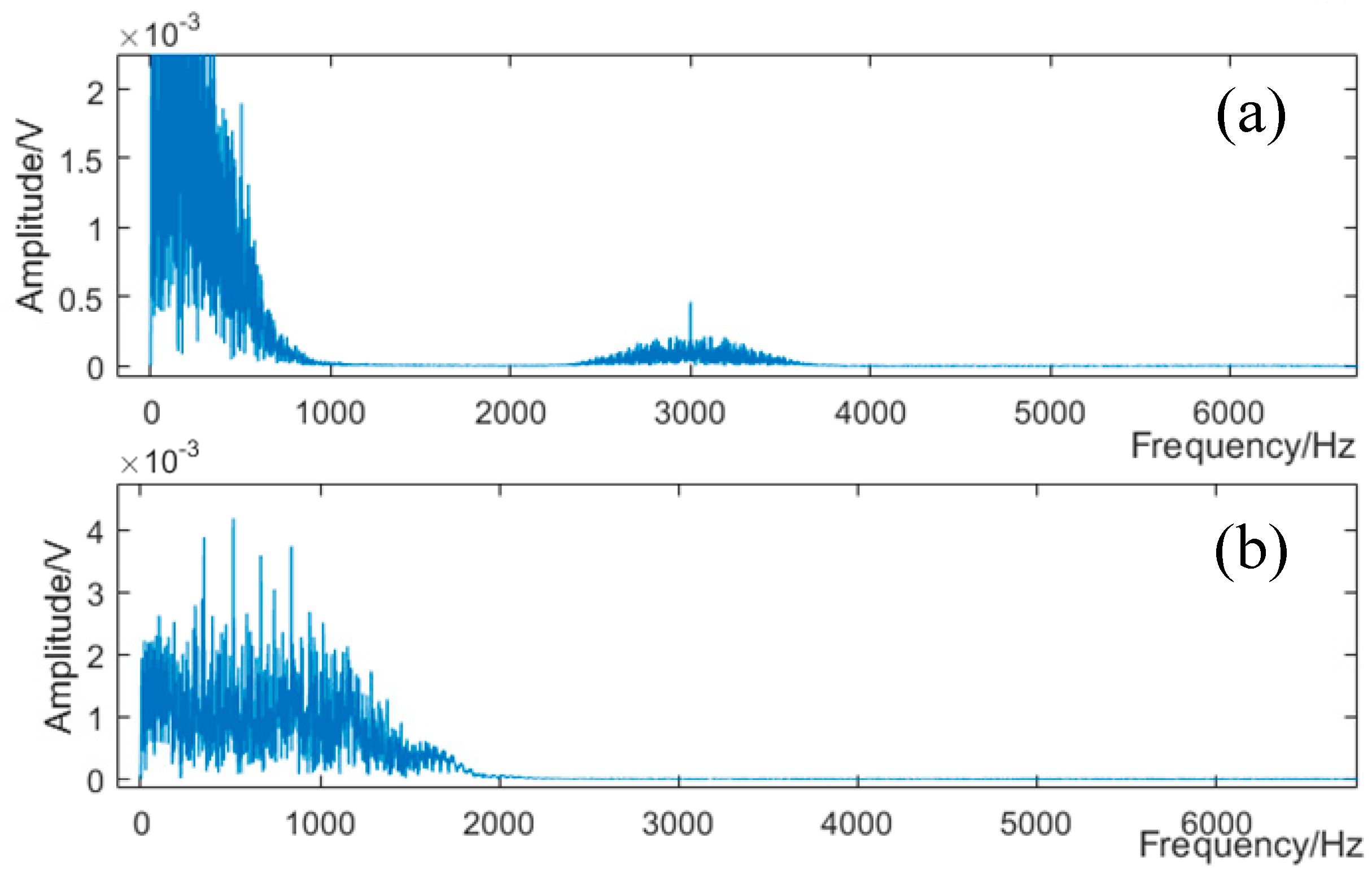
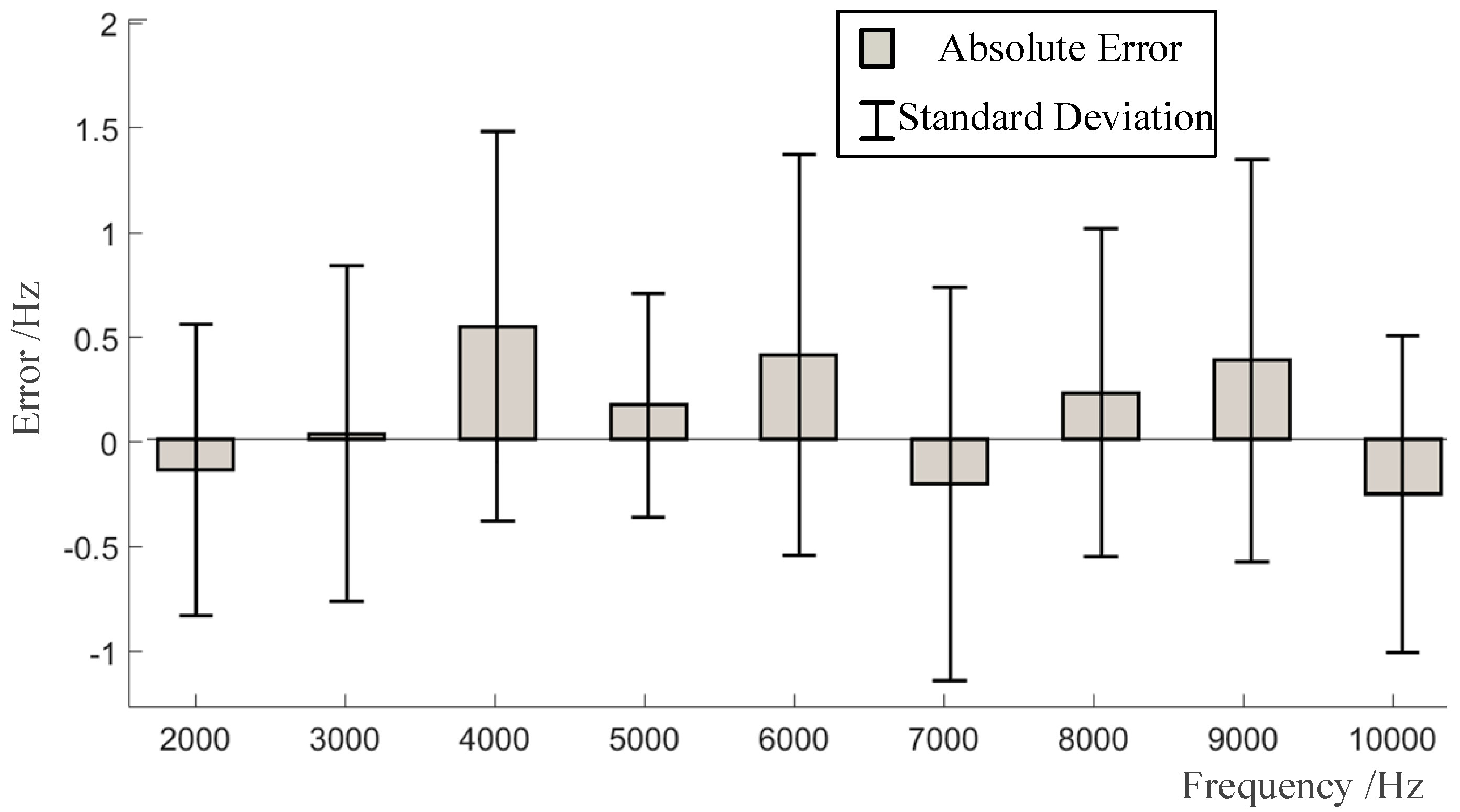
3.1. Frequency Measurement Results
3.2. Amplitude Measurement Results
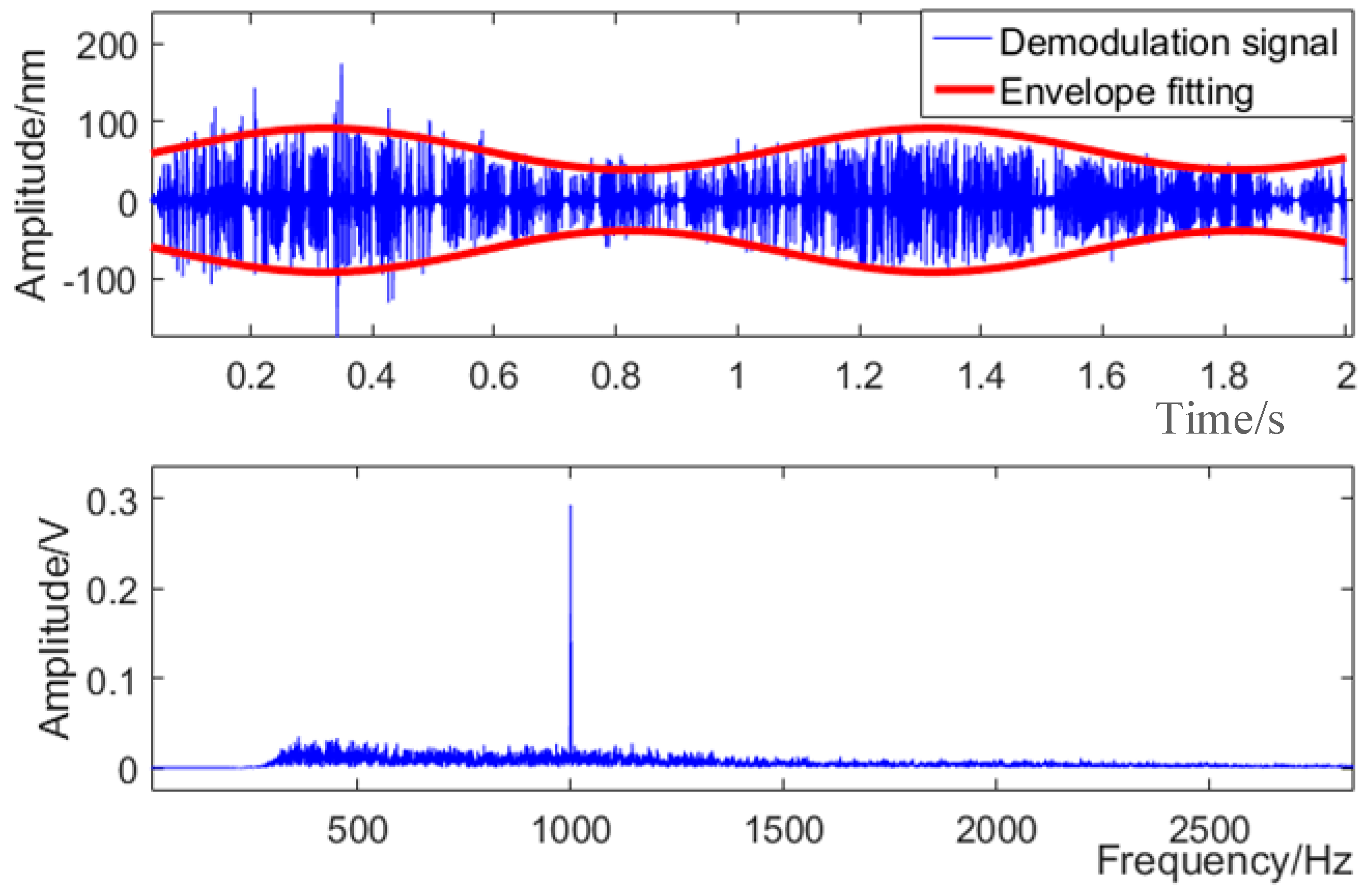
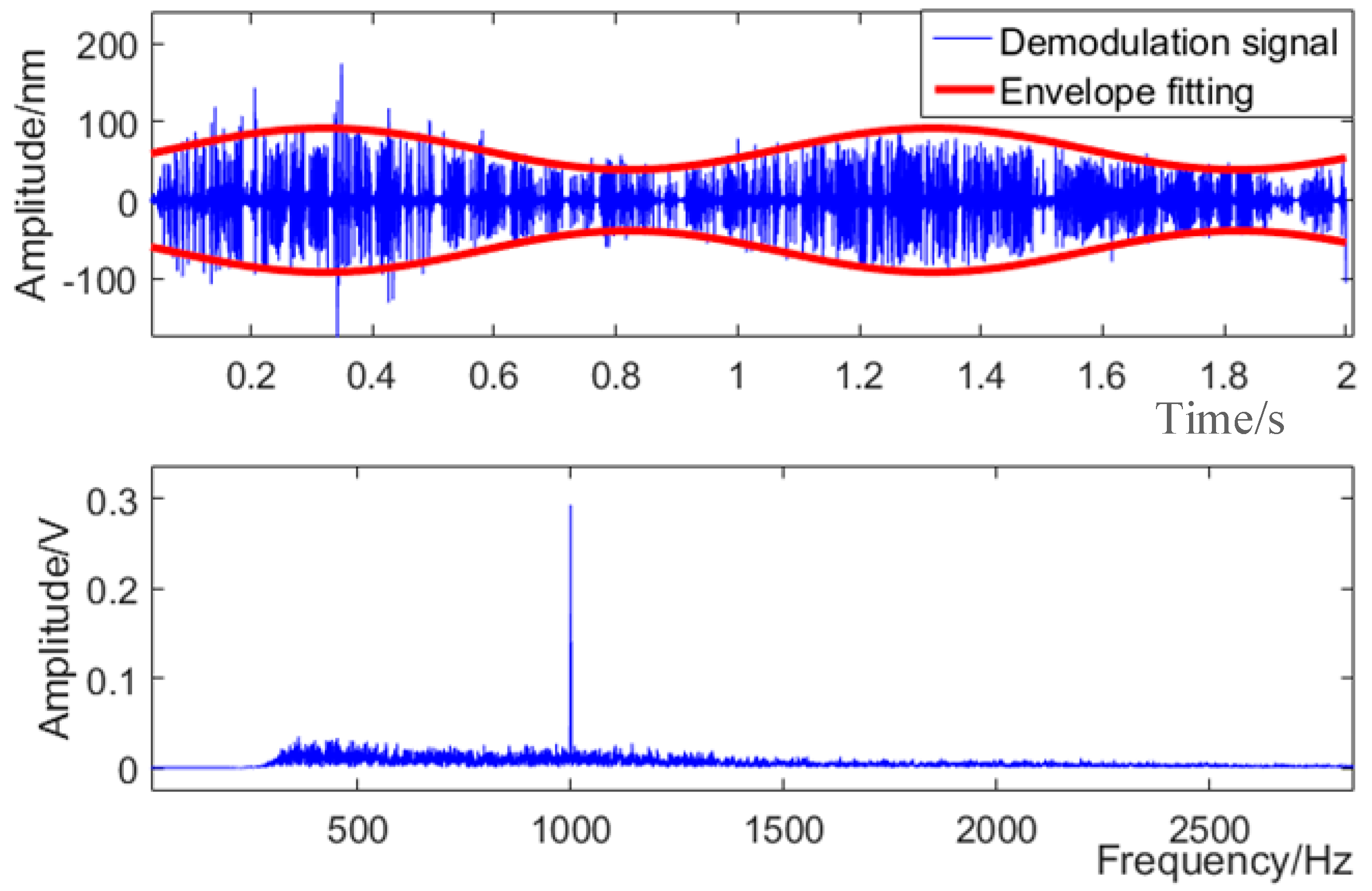
3.3. Results of Tracking Demodulation of Amplitude Modulation Signals
4. Discussion
Author Contributions
Funding
Conflicts of Interest
Appendix A
References
- Hirao, M.; Fukuoka, H.; Hori, K. Acoustoelastic Effect of Rayleigh Surface Wave in Isotropic Material. J. Appl. Mech. 1981, 48, 119–124. [Google Scholar] [CrossRef]
- Dai, Z.H.; Sun, J.Z.; Sui, P.F. Theoretical Study on the Water Surface Transversal Mini-wave due to the Underwater Sound Field. J. Natl. Univ. Def. Technol. 2004, 26, 95–98. [Google Scholar]
- Blackmon, F.; Estes, L.; Fain, G. Linear optoacoustic underwater communication. Appl. Opt. 2005, 44, 3833–3845. [Google Scholar] [CrossRef] [PubMed]
- Minami, Y. Surface tension measurement of liquid metal with inelastic light-scattering spectroscopy of a thermally excited capillary wave. Appl. Phys. B 2014, 117, 969–972. [Google Scholar] [CrossRef]
- Lee, M.S.; Bourgeois, B.S.; Hsieh, S.T.; Martinez, A.B.; Hsu, L.; Hickman, G.D. A laser sensing scheme for detection of underwater acoustic signals. In Proceedings of the Conference Proceedings ’88, IEEE Southeastcon, Knoxville, TN, USA, 10–13 April 1988; pp. 253–257. [Google Scholar]
- Farrant, D.; Burke, J.; Dickinson, L.; Fairman, P.; Wendoloski, J. Opto-acoustic underwater remote sensing (OAURS)—an optical sonar? In Proceedings of the OCEANS’10 IEEE SYDNEY, Sydney, NSW, Australia, 24–27 May 2010; pp. 1–7. [Google Scholar]
- Bruno, F.; Lagudi, A.; Ritacco, G.; Muzzupappa, M.; Guida, R. Opto-Acoustic Data Fusion for Supporting the Guidance of Remotely Operated Underwater Vehicles (ROVs). ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, XL-5/W5, 47–53. [Google Scholar] [CrossRef]
- Antonelli, L.T.; Kenneth, M.W.; Andrew, A. Laser interrogation of air-water interface for in-water sound detection initial feasibility tests. J. Acoust. Soc. Am. 1999, 106, 2298. [Google Scholar] [CrossRef]
- Antonelli, L.T.; Blackmon, F.; Meier, L.I. Acousto-optic localization using a dynamic, Spatio-temporal array. In Proceedings of the Proceedings of OCEANS 2005 MTS/IEEE, Washington, DC, USA, 17–23 September 2005; Volume 1, pp. 1–8. [Google Scholar]
- Miao, R.C.; Wang, Y.M.; Meng, F.; Ma, J. Optical measurement of the liquid surface wave amplitude with different intensities of underwater acoustic signal. Opt. Commun. 2014, 313, 285–289. [Google Scholar] [CrossRef]
- Zhang, L.S.; Zhang, X.L.; Tang, W.Y. Detection of water surface capillary wave by analysis of turning-point local signal data using a laser interferometer. Chin. Opt. Lett. 2017, 15, 36–41. [Google Scholar]
- Zhang, X.L.; Tang, W.Y.; Sun, H.Y. Frequency identification of underwater acoustic signals based on Morlet wavelet. J. Optoelectron. Laser 2010, 21, 1839–1841. [Google Scholar]
- Zhang, L.S.; Zhang, X.L.; Tang, W.Y. Detection of water surface acoustic wave using laser interference based on wavelet ridge. J. Optoelectron. Laser 2015, 26, 103–107. [Google Scholar]
- Zhang, L.S.; Zhang, X.L.; Tang, W.Y. Amplitude measurement of weak sinusoidal water surface acoustic wave using laser interferometer. Chin. Opt. Lett. 2015, 13, 33–37. [Google Scholar]
- Li, S.W.; Shao, S.Y.; Mei, H.P.; Hao, Q.; Tao, R. Interference Phase Generated Carrier Demodulation Algorithm Based on Synchronous Carrier restoration Method. Chin. J. Lasers 2016, 43, 1204004. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Amplitude/nm | Frequency/Hz | Initial Phases/rad | |
|---|---|---|---|
| Disturbances (superimposition) | 1500 | 3 | 0.8π |
| 3000 | 4 | 0.2π | |
| 1000 | 5 | 1.2π | |
| WSAW | 30 | 1000 | 0.5π |
| Laser wavelength λ/nm | 632.8 | ||
| System gain of the signals A/V | 1 | ||
| The fixed system phase Ω/rad | 10,000 | ||
| SNR of system/dB | 20 | ||
| Equipment | Parameter | Value |
|---|---|---|
| He–Ne Laser | Wavelength/nm | 632.8 |
| Power/mW | 0.6–1.4 | |
| Power stability | ±0.1% | |
| Underwater speaker | Rated power/W | 15 |
| Frequency response /Hz | 80–20,000 | |
| Data acquisition card | Sampling rate/kS/s | 100 |
| Resolution/bit | 16 |
| f/Hz | H (Ac = 39.28 nm) | θc/rad | As/nm | σ/nm | |
|---|---|---|---|---|---|
| 500 | 0.39 | 0.628 | 48.59 | 1.63 | |
| 1.309 | 50.03 | ||||
| 0.211 | 51.77 | ||||
| 0.785 | 53.42 | ||||
| 1.553 | 51.22 | ||||
| 3000 | Sum of Low/V | Sum of high/V | R | As/nm | σ/nm |
| 3.157 | 1.044 | 3.023 | 31.64 | 1.31 | |
| 2.684 | 0.861 | 3.117 | 30.78 | ||
| 2.551 | 0.854 | 2.986 | 32.00 | ||
| 4.003 | 1.408 | 2.843 | 33.44 | ||
| 3.996 | 1.453 | 2.750 | 34.44 | ||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, X.; Mao, H.; Tang, W. Demodulation Technique Based on Laser Interference for Weak Photo-Acoustic Signals on Water Surface. Appl. Sci. 2018, 8, 2423. https://doi.org/10.3390/app8122423
Zhang X, Mao H, Tang W. Demodulation Technique Based on Laser Interference for Weak Photo-Acoustic Signals on Water Surface. Applied Sciences. 2018; 8(12):2423. https://doi.org/10.3390/app8122423
Chicago/Turabian StyleZhang, Xiaolin, Hongjie Mao, and Wenyan Tang. 2018. "Demodulation Technique Based on Laser Interference for Weak Photo-Acoustic Signals on Water Surface" Applied Sciences 8, no. 12: 2423. https://doi.org/10.3390/app8122423
APA StyleZhang, X., Mao, H., & Tang, W. (2018). Demodulation Technique Based on Laser Interference for Weak Photo-Acoustic Signals on Water Surface. Applied Sciences, 8(12), 2423. https://doi.org/10.3390/app8122423