1. Introduction
Nowadays, electric vehicles (EVs) are receiving great attention due to their benefits in saving energy, decreasing greenhouse gas emissions, and reducing the dependence on conventional fossil fuels [
1,
2]. Driven by policies and regulations, the number of EVs is projected to rise significantly over the coming decades [
3,
4]. As the penetration rate of EVs is expected to continue growing exponentially, a lot of energy will be required to support EV charging. The influences of EVs on the power grid may include power losses (feeders overloading and transformer overloading) and power quality (harmonics, unacceptable voltage fluctuations and voltage profile) [
5]. Without any control strategies, the charging process of EVs will significantly affect the electric power grid, especially during peak hours [
6]. Among the possible solutions to cope with the new peak demand during peak hours is to increase power generation to handle the growth in vehicle charging or to upgrade the distribution system infrastructure. However, these are difficult and expensive solutions [
7]. In order to manage and coordinate an EV charging/discharging operation, there is a need for a cost-effective solution, especially in the distribution power network.
Different research work and studies have been conducted for EV charging schemes from different perspectives, including distribution transformer aging [
8], apartment buildings [
9], office buildings [
10] and commercial buildings [
11]. Paterakis et al. [
8] studied the impact of smart neighborhood load on a distribution transformer aging under a time-varying pricing scheme. The system consisted of a low voltage distribution system across four houses. Each house was equipped with a rooftop photovoltaic (PV) and an energy storage system (ESS). Different scenarios have been investigated considering different EV types. Van Roy et al. [
9] investigated the impact of EV charging strategies in an apartment building equipped with a PV system in terms of an EV utility factor, self-power consumption, and grid impact. Van Roy et al. [
10] discussed the impact of different EV charging strategies in a real office building equipped for EVs, a large photovoltaic system and a combined heat and power (CHP) unit. Charging strategies have been evaluated in terms of self-electricity consumption and grid impact. Energy storage solutions such as battery storage systems were not considered in References [
9,
10]. Tavakoli et al. [
11] investigated a two-stage energy management strategy for a demand response program considering the operation of EVs and a wind power-based commercial building microgrid with the objective of minimizing the building’s operational costs.
Charging schemes are classified into four basic types: uncontrolled, indirectly controlled, smart and bidirectional charging [
12,
13]. In uncontrolled charging, there is no attempt to schedule EVs as they begin to charge immediately from the charging stations upon their arrival. Indirectly controlled schemes aim to control some parameters such as charging cost and energy price that will affect the charging operation indirectly. Both smart charging schemes and bidirectional charging schemes aim to control the charging parameters directly, such as output power from a charging station, charging time, and charging duration. However, bidirectional charging schemes support vehicle-to-grid (V2G) concepts that enable EV batteries to discharge.
Coordinating EV charging has a major impact on end users [
14,
15,
16,
17,
18], retailers [
19,
20], and power grid operators [
21,
22,
23]. With respect to end user preferences, authors in [
14,
15] studied the scheduling problem of EV charging in order to minimize customers’ electricity payments and reduce the peak to average power ratio (PAPR). Deilami et al. and Akhavan-Reai et al. [
16,
17] proposed real-time EV load management to minimize the total energy cost for plug-in electric vehicle (PEV) charging and the corresponding grid energy losses. The proposed scheme in [
16] assigned preference time zones with different energy tariffs to customers in order to charge their vehicles. Authors in [
18] simulated an EV charging model for an individual EV load profile under a real-time price (RTP) to minimize electricity payments for users. In addition, Zhao et al. [
19,
20] studied the online peak-minimizing algorithm for an aggregator, which managed a large set of EV charging jobs with deadlines by planning the charging schedules in order.
With respect to the distribution power system, Khatiri-Doost et al. [
21] presented a new approach for the coordination of the charging and discharging of multiple EVs in a smart distribution system. The main objective was to minimize the peak shaving and active power losses. Alonso et al. [
22] developed and implemented an optimization algorithm for managing EV charging by considering a genetic algorithm in a low voltage distribution system. The proposed algorithm took into account the thermal line limit, transformer loading, parking availability, and voltage limits. Chaudhari et al. [
23] proposed a hybrid optimization algorithm for minimizing EV charging costs using energy storage management in a PV-integrated charging station. The algorithm considered the real-time electricity price and real-time PV output from the solar system in the PV-integrated charging station.
In order to maintain the technical limits of the power grid, power grid operators are aiming to design flexible EV charging schemes while satisfying the vehicle owner’s preferences. To achieve this goal, bidirectional power and information flows are required. Therefore, the aggregator plays the main role between the power grid operator and vehicle owners in the EV system. For encouraging end users to change energy usage habits, time-of-use (TOU), real-time pricing (RTP) and critical peak pricing (CPP) are different price-based options as defined by the US Dept. of Energy during different time-periods [
24,
25].
The activities of EVs including charging and discharging enable them to participate in various domains such as vehicle-to-home (V2H), vehicle-to-building (V2B), V2G and vehicle-to-vehicle (V2V) [
26,
27,
28]. V2B consists of EVs, bidirectional chargers and small-scale renewable energy resources, such as photovoltaic systems and small-scale wind turbines. EVs are able to draw/transfer the energy from/to the building based on their battery status and offer services such as reducing the on-peak load of the building’s power consumption through peak shaving, load shifting and valley filling.
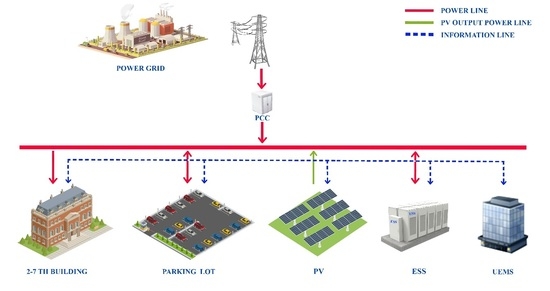
This paper studies the impact of EV charging on the building’s power consumption and presents a cost-effective solution for peak load minimization in an educational building equipped with a PV system and an ESS. In this work, we propose an optimal energy management algorithm (OEMA) for peak load minimization in a university campus. The system model consists of an educational building with laboratories, a smart parking lot, EVs, PV panels and an ESS. We also propose a time allocation scheme for EV charging and discharging based on priority. The priority determination rules are calculated based on different decision factors including both vehicle and user preference. We define three different priority levels as high, medium and low. Charging services will be allocated to EVs with higher priorities without violating the operational constraints of the grid. The proposed scheme is designed to minimize EV charging cost while balancing the load of the power grid. The simulation results outperformed the conventional charging method in terms of peak power and charging cost.
The remainder of this paper is organized as follows:
Section 2 presents the system architecture and components.
Section 3 explains the proposed optimal energy management algorithm in detail.
Section 4 presents the simulation results and a discussion of different scenarios and the conclusion is given in
Section 5.
3. Proposed Optimal Energy Management Algorithm
The main objective of the energy management system is to minimize the total power consumption from the main power grid, as given in Equation (4).
where
is the amount of power consumption from the main power grid at time
ts,
is the building power consumption at time
ts,
is the charging/discharging capacity of an EV at time
ts,
is the charging/discharging capacity of the ESS at time
ts, and
is the generated power from the PV system at time
ts. The coefficients
α,
β, and
γ are related to EV, ESS, and PV, respectively, as shown in Equations (5)–(7).
In this work, the proposed optimal energy management algorithm (OEMA) assigns different priorities to EV charging by considering the status of the building’s power consumption, PV output and ESS. We assume that time is slotted and indexed by an integer in
T = {1,2, 3, …,
T}, where
T is the time-period. The time-period is 24 h consisting of time slots. The time slot size (∆
ts) is 15 min. The main objective of this work is to minimize EV charging costs while balancing the load profile of the power grid. We calculate the required number of charging timeslots (
Nt) for each EV based on Equation (8) where
SOCreq is the desired SOC of the EV battery for the user for the next trip (departure time),
Bev is battery capacity,
Pc is charging rate and
η is the coefficient of charging power rate.
The EV charging cost is given in Equation (9) where
C is the minimum EV charging cost,
Celec(
ts) is the charging cost,
Pc is the charging rate, and
η is charging efficiency.
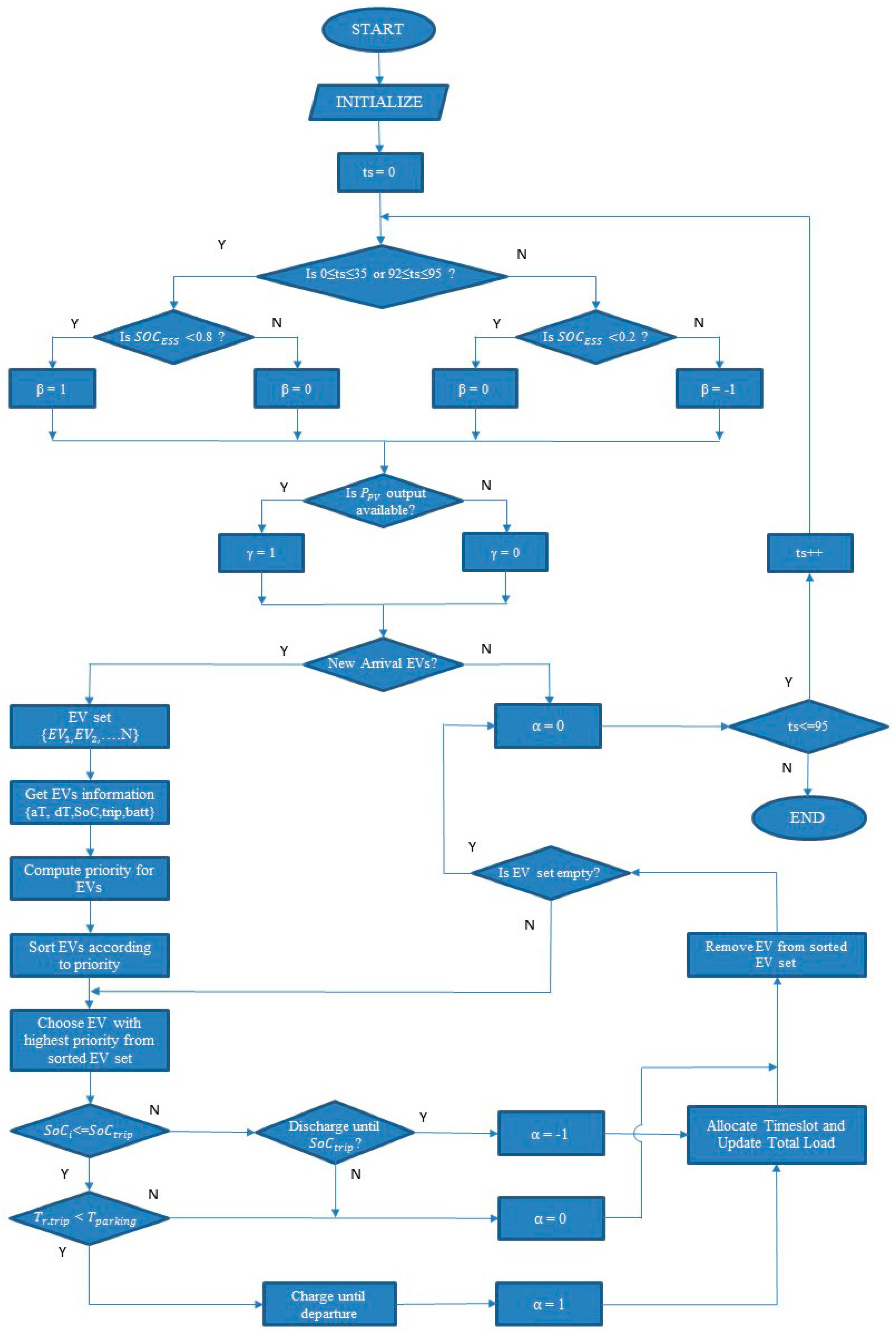
Figure 5 illustrates the main flow chart of the proposed algorithm. The algorithm includes three main parts: ESS, PV output and EV charging/discharging with the user’s preferences. The UEMS receives monitoring data from different sub-systems through communication networks. The major roles of the UEMS are:
Step 1: -Initiation.
Step 2: -Check Status of ESS.
Check time period (off, mid, on).
Check ESS status at current ts then decide on the participation of ESS.
If (SOC of ESS < 80%) β = 1 {charge ESS by charging power of ESS} else (SOC of ESS > 80%) β = 0 if (SOC of ESS < 20%) β = 0 {charge ESS by charging power of ESS} else (SOC of ESS > 20%) β = −1
Step 3: -Check Status of PV output.
Step 4: -Check New Arrival of EVs and Priority Determination.
Check newly arrived EVs in current ts.
Create EV set then enroll new arrival EVs in EV set.
Get EV information such as arrival and departure time, SOC, battery capacity and trip distance.
Compute priority for EVs according to EV information.
Descending sort EVs according to priority.
Choose EV with highest priority from sorted EV set.
Check the current SOC and decide participation with user’s preference (charge or discharge).
Allocate numbers of charging/discharging timeslots into the building load profile.
Step 5: -Update load profile
The load profile is updated.
If ts number is greater than 95, finish programming unless ts increased by one then go to step two.
Priority Determination Algorithm
The priority determination rules are calculated based on different decision factors including both vehicle and user preference. The main parameters of priority rules are arrival time, departure time, SOC, trip distance and battery capacity. After calculating the EV priority, the aggregator assigns these priorities to EVs for charging, as given in Equation (10) where
,
,
and
are stay time, state of charge, trip distance and battery capacity, respectively. After EVs have been prioritized, the highest priority EVs are allocated first for charging (timeslots with low electricity cost).
We defined three different priority levels as high, medium and low, as shown in
Table 1. Regarding the EV stay time, low priority is given if the EV stay time is greater than 6 h while high priority is considered if the EV stay time is less than 3 h. With respect to the initial SOC of an EV battery, we define a high priority for SOC as less than 20%, medium as 20–80% and low priority as a SOC greater than 80%. We also consider trip distance; low priority for a trip is less than 10 km, medium 10–60 km and high priority greater than 60 km. Two priority levels for EV battery capacity are defined; medium and low. Low priority is assigned to a battery capacity less than 30 kWh while medium priority is greater than 30 kWh. As a result, the charging service will be allocated to EVs with higher priorities without violating the grid’s operational constraints. Algorithm 1 explains the priority determination algorithm in detail.
| Algorithm 1. Priority Determination Algorithm |
| Input: V—Set of charging requests from EVs |
| Info—information of arrival of EVs (, , ) |
| Output: P—Set of priority lists for charging EVs |
| 1. , , , |
| 2. for i ← 1 to |V| do |
| 3. if 20 then |
| 4. |
| 5. else if 80 then |
| 6. |
| 7. else if then |
| 8. |
| 9. end if; |
| 10. if 3 then |
| 11. |
| 12. else if 6 then |
| 13. |
| 14. else if then |
| 15. |
| 16. end if; |
| 17. if 10 then |
| 18. |
| 19. else if 40 then |
| 20. |
| 21. else if then |
| 22. |
| 23. end if; |
| 24. if 10 then |
| 25. |
| 26. else if then |
| 27. |
| 28. end if; |
| 29. ; |
| 30. P.insert (); |
| 31. end for |
4. Simulation Results
In this work, we considered a real case study to evaluate the performance of the proposed optimal energy management algorithm. The real data for the demand load profile of the engineering building 2–7, Chonbuk National University, Jeonju Campus, South Korea were obtained during a working day. We considered five different scenarios with different system configurations, as given in
Table 2. We assumed the time slot size was set to be 15 min, the ESS capacity was set to 50 kWh, and the charging and discharging power of ESS was 6.6 kWh. The output power of the PV system was based on Reference [
30]. Simulation parameters and assumptions are given in
Table 3.
Three types of EVs (Hyundai BlueOn, Kia Soul and Nissan Leaf Zeo) with different battery capacities (16.4 kWh, 27 kWh and 30 kWh) were considered [
31], as given in
Table 4. The charging and discharging power for each EV was set to 3.6 kWh. The charging and discharging efficiency were configured as 0.90 and 0.85, respectively. The driver behavior regarding arrival time, departure time, and driving range is given in
Table 5. The electricity cost of Korea Electric Power Corporation (KEPCO) during the summer season is shown in
Table 6. We considered the electric rate of an educational tariff with option two [
32]. We used C++ programming language for our real-time algorithm. Also, we used Qt Creator which is a cross-platform C++, JavaScript and QML integrated development environment which is part of the software development kit (SDK) for the graphical user interface (GUI).
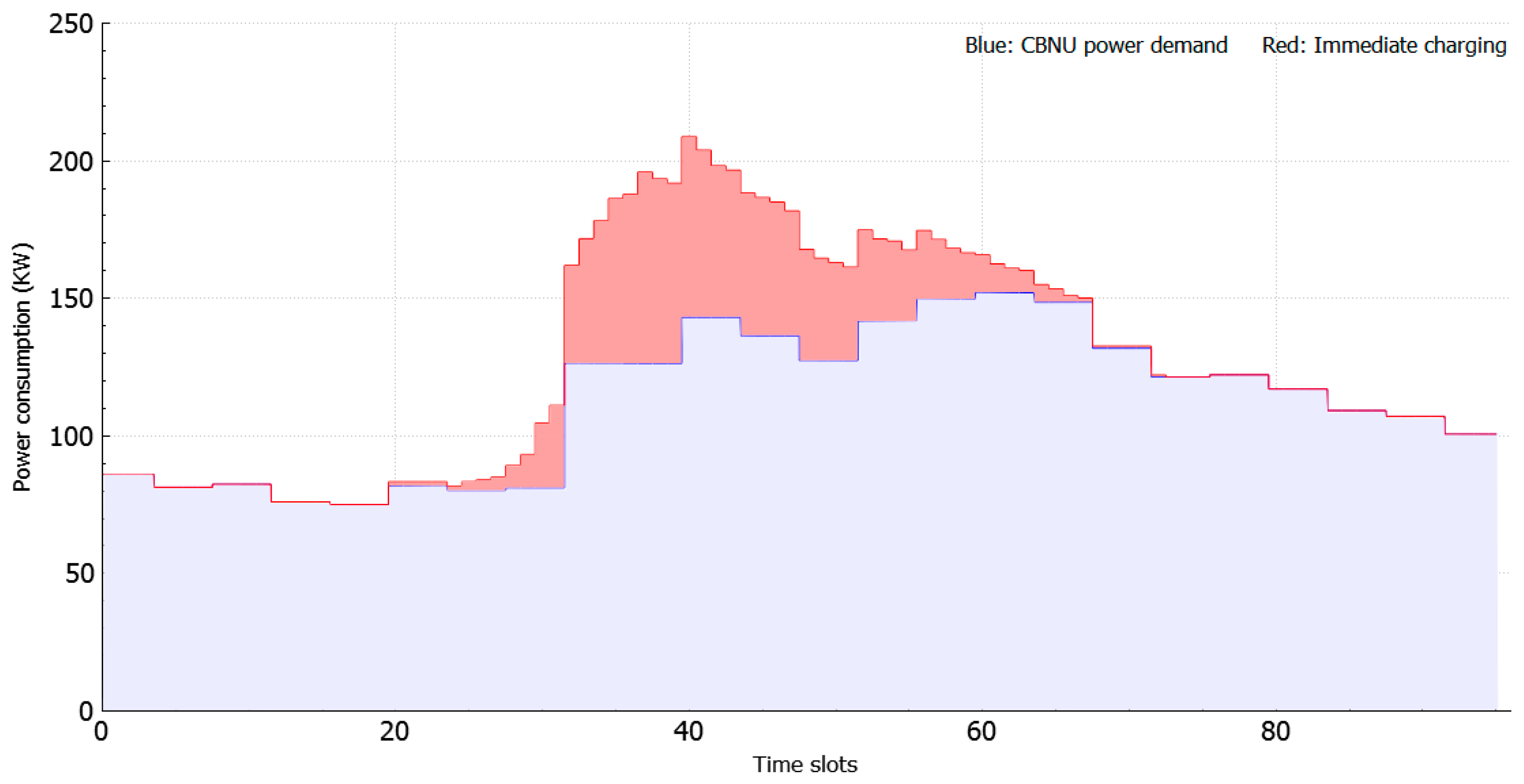
4.1. Scenario One: Immediate Charging EVs
In immediate charging, EVs start charging directly upon arrival without any attempt to schedule or organize their needs.
Figure 6 shows the result of the uncoordinated charging scheme where 100 EVs were charged immediately after arriving at the parking lot. The peak power consumption was about 208 kW at 11.00 a.m. The charging load of the EVs coincided with the building’s daily peak demand hours. Both the PV system and the ESS were not configured in this scenario. The result showed that the impact of EV charging on the building power consumption was very severe.
4.2. Scenario Two: EVs Coordinated Charging
The coordinated charging aims to manage/organize EV charging in order to decrease the peak power consumption of the building while fulfilling user requirements.
Figure 7 shows the result of the coordinated charging scheme for 100 EVs. The PV system and the ESS were not considered as in scenario one. The proposed algorithm was able to manage the charging of EVs with minimum charging cost, however, power consumption showed two peaks during the periods of low charging cost. The first time period was between 9:00 a.m. and 11:00 a.m., and the second time period was at 1:00 p.m. The peak power consumption was about 192 kW at 10:15 a.m., which was lower than in scenario one.
4.3. Scenario Three: EVs, PV and ESS
Scenario three considers the cooperation among EVs, PV and ESS to reduce the building’s power consumption. Compared to scenario one and scenario two, EVs were able to discharge part of their batteries in order to support the load demands of the building by providing power during peak periods.
Figure 8 shows the simulation result considering 50 EVs, a PV system of 10 kWh and an ESS of 30 kWh. The proposed algorithm showed a reduction in the building’s power consumption during the period between 11:00 a.m. and 7:00 p.m. During that time, the output power from PV panels was enough to support part of the EV charging during their parking time. We noticed that power consumption during the remaining periods was similar to the initial building power consumption.
4.4. Scenario Four
Scenario four was an extension to scenario three, considering a system configuration with 100 EVs, a PV system of 30 kWh and an ESS of 50 kWh. The output power from the PV system was enough to decrease the building’s power consumption during the period between 11:00 a.m. and 8:00 p.m., as shown in
Figure 9. As the number of EVs had been doubled compared to scenario three, there was an increase in the building’s power consumption at 9:00 a.m. Peak power consumption was about 132 kW. This increase was due to the low charging costs during the mid-peak from 9:00 a.m. to 10:00 a.m.
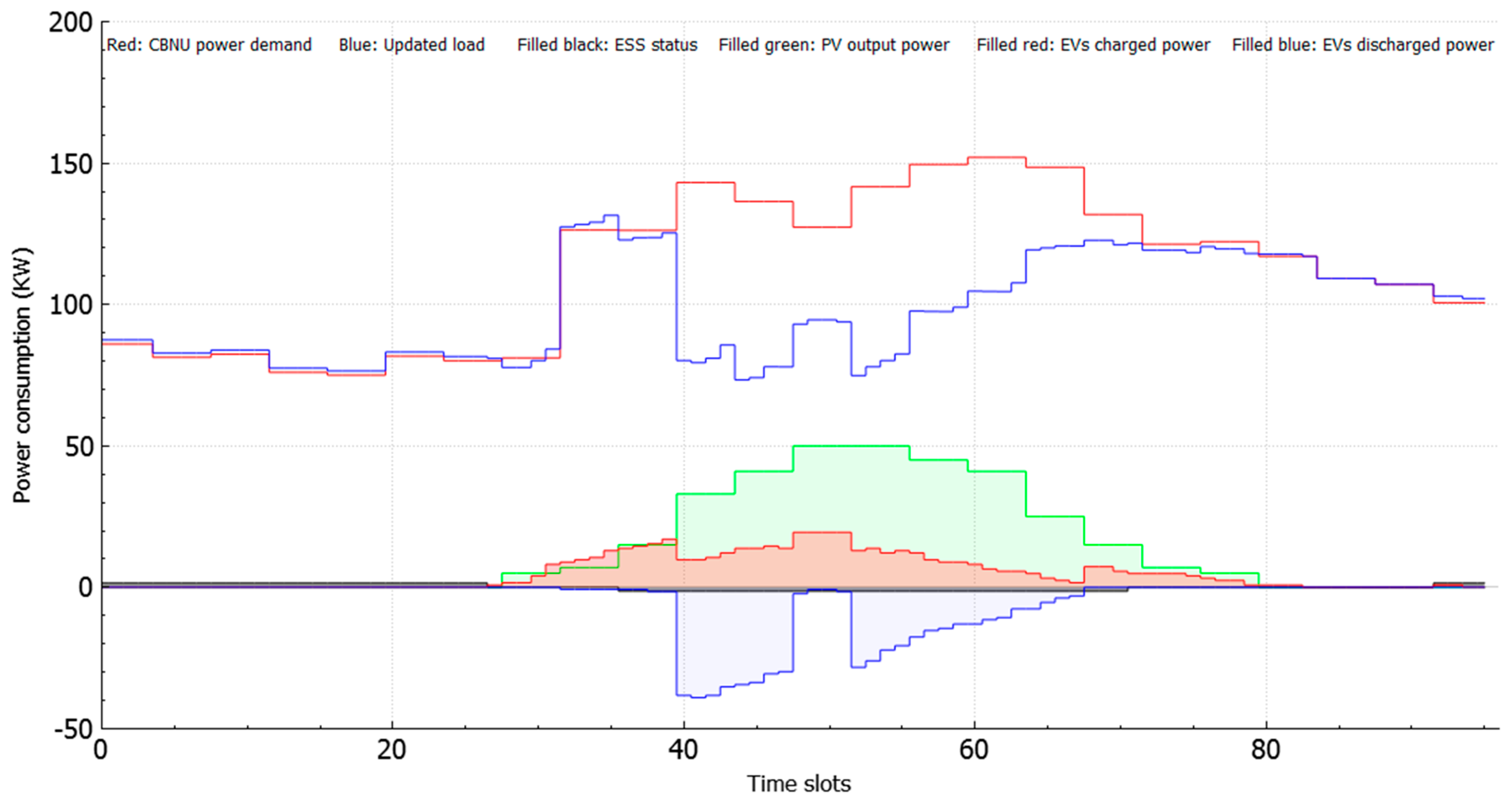
4.5. Scenairo Five
We also considered a future scenario for the university building with a PV system of 50 kWh, an ESS of 80 kWh and a smart parking lot to support 150 EVs. The simulation results showed a great reduction in building power consumption during the period from 11:00 a.m. to 6:00 p.m., as shown in
Figure 10. However, there was a small reduction in the power consumption during the period between 9:00 a.m. and 11:00 a.m.
Table 7 shows a comparison between different scenarios with respect to peak power consumption, charging/discharging costs and the number of EVs. The initial peak demand of the educational building was about 152 kW. Considering an uncontrolled charging scenario, there was a significant increase in the peak power consumption of about 26.92% (208 kW). However, scheduling EV charging with the help of the PV system and the ESS gave an opportunity to decrease the building’s peak power. The simulation results showed that peak load decreased by about 14.47% and the charging cost of EVs reduced from 202,294 KRW in scenario one to 74,319 KRW in scenario five.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}