
Minimization of Average Peak Age of Information for Timely Status Updates in Two-Hop IoT Networks


Abstract
1. Introduction
- (1)
- The group size for joint packet coding;
- (2)
- The blocklength of a status packet in the first hop;
- (3)
- The blocklength of a coded packet in the second hop.
- We present a closed-form formula for the average PAoI in a two-hop status update system with joint packet coding in the finite blocklength regime.
- Based on this formula, we jointly optimize the first-hop blocklength, second-hop blocklength, and group size to minimize the average PAoI.
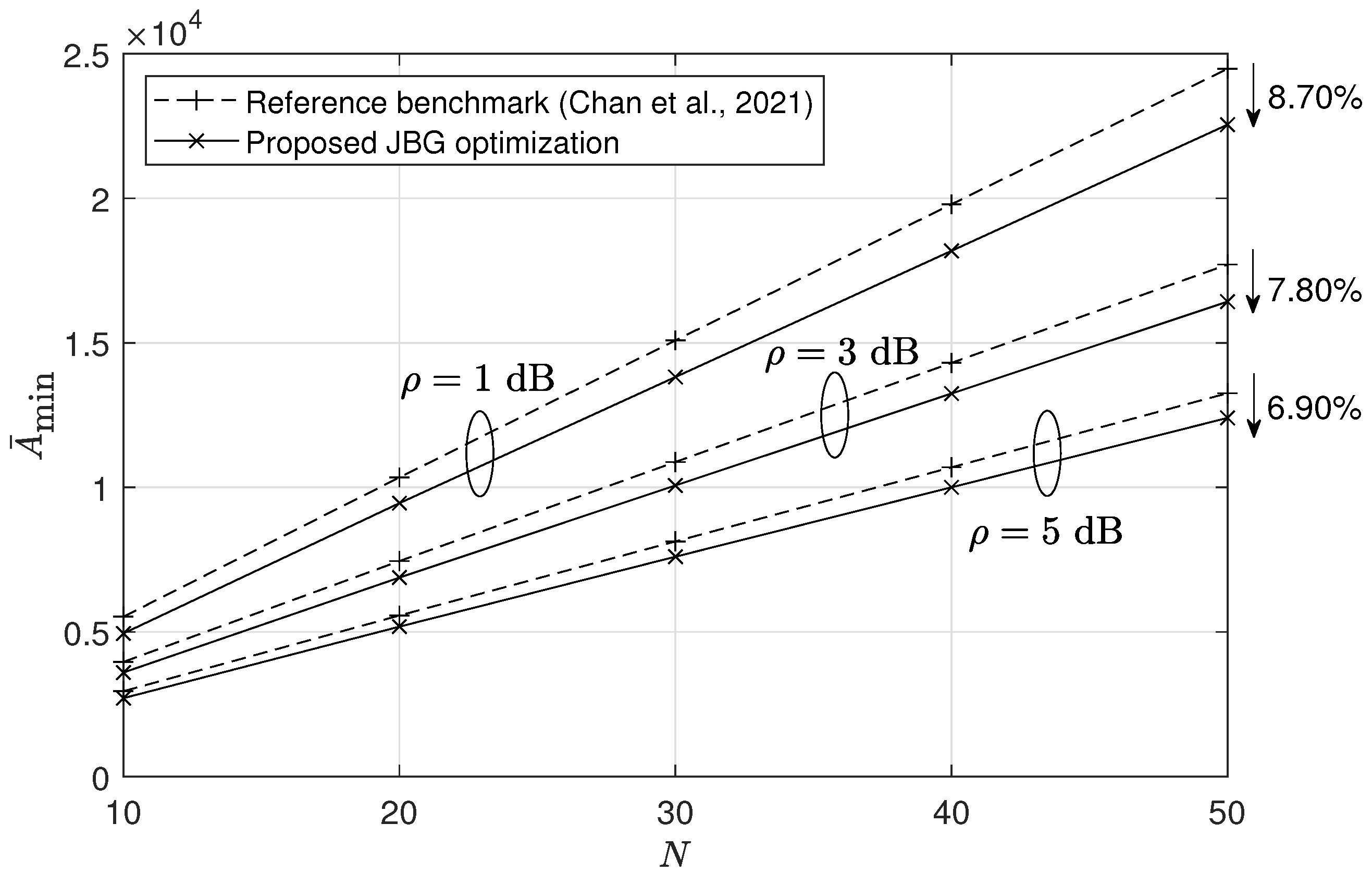
- Through numerical studies, we validate the effectiveness of our analysis and optimization. In particular, the results show that the proposed scheme reduces the average PAoI by around 8% compared to the existing approach, with more significant gains observed under poor wireless channel conditions.
2. Related Work
2.1. Blocklength Optimization for AoI Reduction
2.2. Packet Concatenation for AoI Reduction
2.3. Error Control Techniques for AoI Reduction
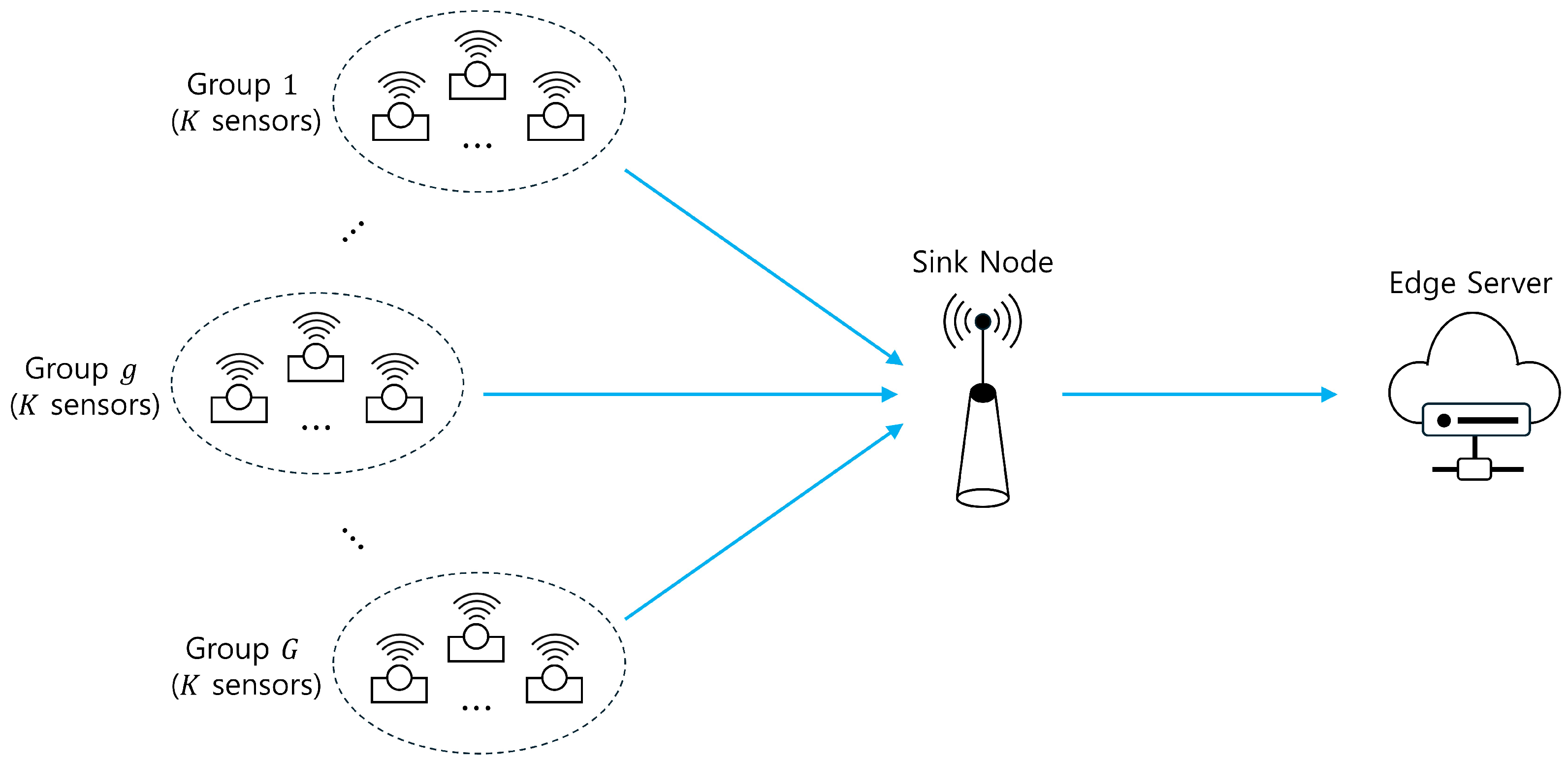
3. System Model
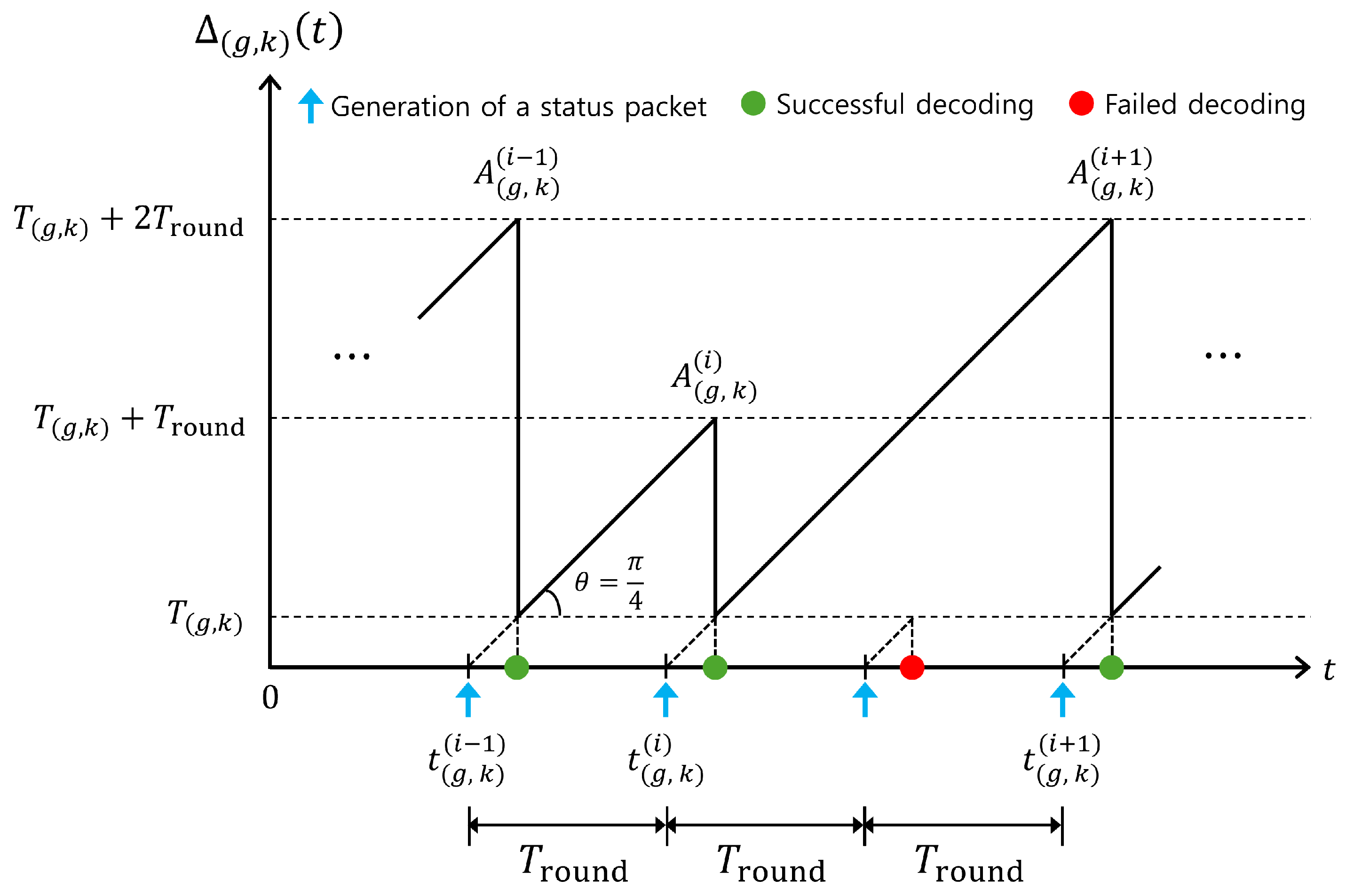
4. Average PAoI Analysis
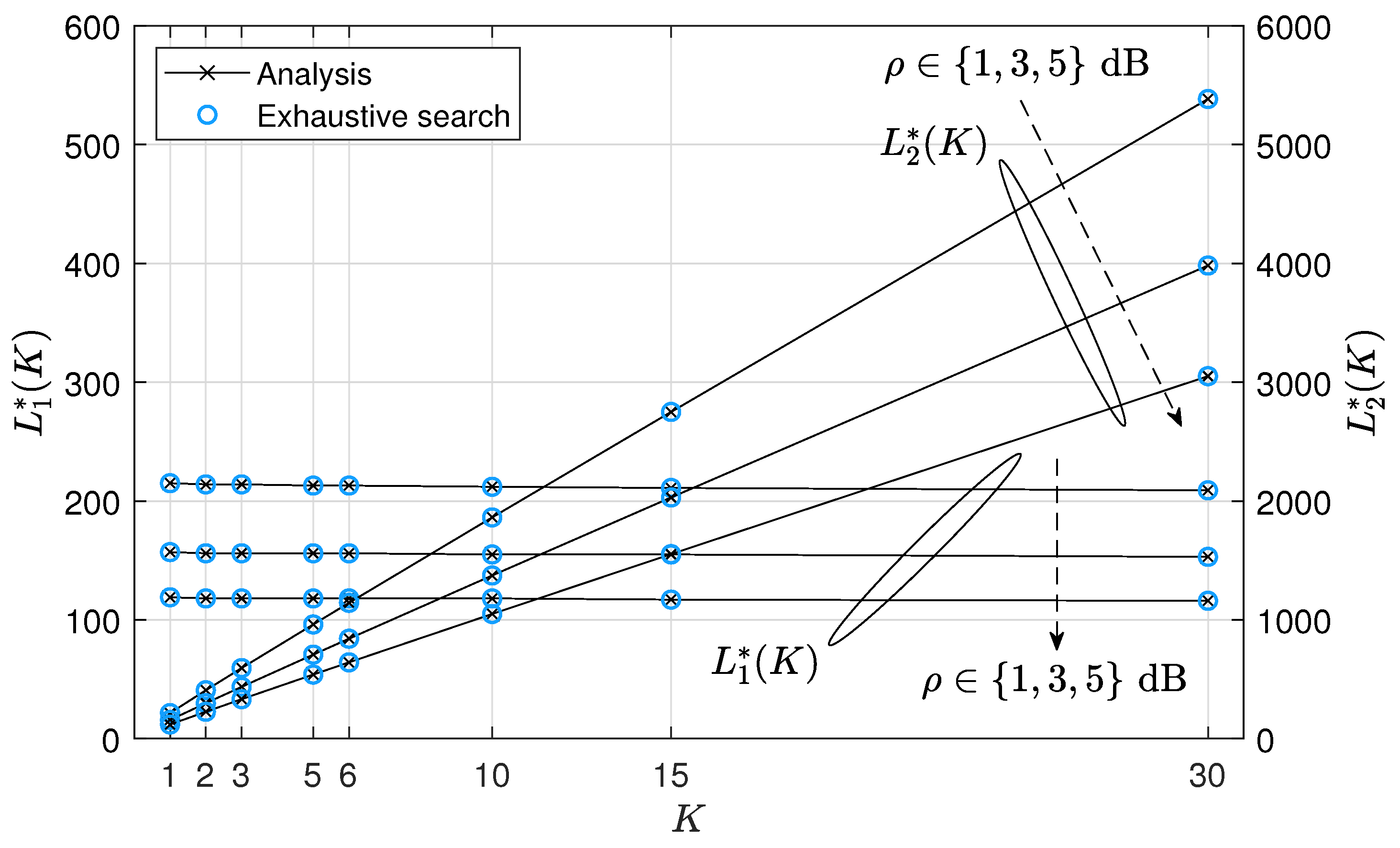
5. Average PAoI Minimization
6. Numerical Studies
6.1. Parameter Setting
6.2. Validation via Monte Carlo Simulations
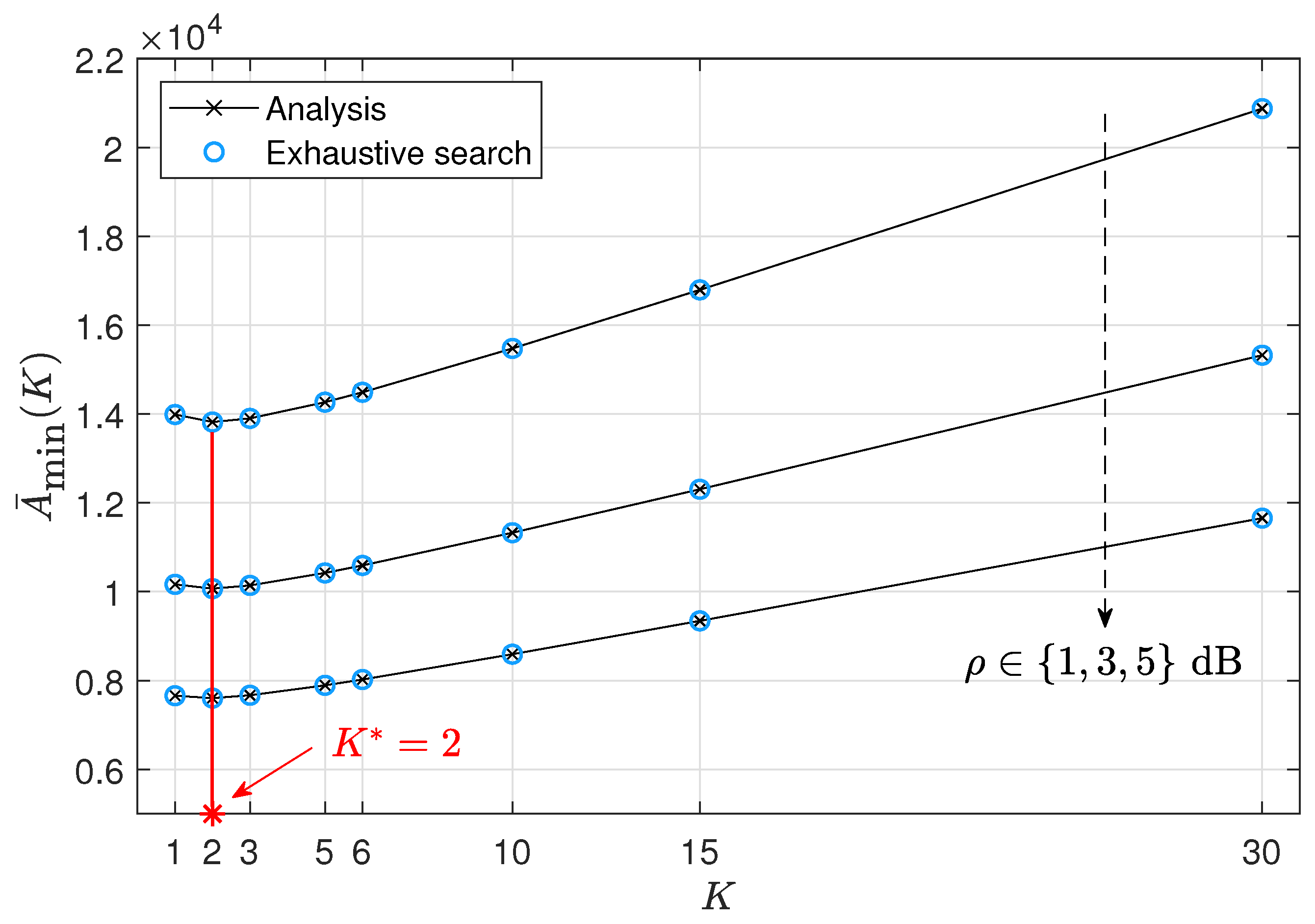
6.3. JBG Optimization
6.4. Impact of the Number of Sensors
6.5. Comparison
7. Discussion
7.1. Applicability to Fading Channels
7.2. Applicability to Average and Variance of AoI
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Gu, Y.; Chen, H.; Zhou, Y.; Li, Y.; Vucetic, B. Timely status update in Internet of Things monitoring systems: An age–energy tradeoff. IEEE Internet Things J. 2019, 6, 5324–5335. [Google Scholar] [CrossRef]
- Kaul, S.; Gruteser, M.; Rai, V.; Kenney, J. Minimizing age of information in vehicular networks. In Proceedings of the IEEE SECON 2011, Salt Lake City, UT, USA, 27–30 June 2011; pp. 350–358. [Google Scholar] [CrossRef]
- Kaul, S.; Yates, R.; Gruteser, M. Real-time status: How often should one update? In Proceedings of the IEEE INFOCOM 2012, Orlando, FL, USA, 25–30 March 2012; pp. 2731–2735. [Google Scholar] [CrossRef]
- Costa, M.; Codreanu, M.; Ephremides, A. On the age of information in status update systems with packet management. IEEE Trans. Inf. Theory 2016, 62, 1897–1910. [Google Scholar] [CrossRef]
- Chan, T.-T.; Pan, H.; Liang, J. Age of information with joint packet coding in industrial IoT. IEEE Wirel. Commun. Lett. 2021, 10, 2499–2503. [Google Scholar] [CrossRef]
- Zhang, W.; Jiang, M.; Zhao, C. Age of information with product coded IoT systems. In Proceedings of the 2022 International Symposium on Wireless Communication Systems (ISWCS), Hangzhou, China, 19–22 October 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Tang, Z.; Yang, N.; Sadeghi, P.; Zhou, X. The age of information of short-packet communications: Joint or distributed encoding? In Proceedings of the IEEE ICC, Seoul, Republic of Korea, 16–20 May 2022; pp. 2175–2180. [Google Scholar] [CrossRef]
- Zou, Z.; Chan, T.-T.; Pan, H.; Lok, T.-M. Age of information and energy harvesting tradeoff for joint packet coding in downlink IoT networks. In Proceedings of the 2022 IEEE 95th Vehicular Technology Conference (VTC2022-Spring), Helsinki, Finland, 19–22 June 2022; pp. 1–5. [Google Scholar] [CrossRef]
- Shirvanimoghaddam, M.; Mohammadi, M.S.; Abbas, R.; Minja, A.; Yue, C.; Matuz, B.; Han, G.; Lin, Z.; Liu, W.; Li, Y.; et al. Short block-length codes for ultra-reliable low latency communications. IEEE Commun. Mag. 2019, 57, 130–137. [Google Scholar] [CrossRef]
- Polyanskiy, Y.; Poor, H.V.; Verdú, S. Channel coding rate in the finite blocklength regime. IEEE Trans. Inf. Theory 2010, 56, 2307–2359. [Google Scholar] [CrossRef]
- Durisi, G.; Koch, T.; Popovski, P. Toward massive, ultrareliable, and low-latency wireless communication with short packets. Proc. IEEE 2016, 104, 1711–1726. [Google Scholar] [CrossRef]
- Trillingsgaard, K.F.; Popovski, P. Downlink transmission of short packets: Framing and control information revisited. IEEE Trans. Commun. 2017, 65, 2048–2061. [Google Scholar] [CrossRef]
- Wang, R.; Gu, Y.; Chen, H.; Li, Y.; Vucetic, B. On the age of information of short-packet communications with packet management. In Proceedings of the IEEE GLOBECOM, Waikoloa, HI, USA, 9–13 December 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Cao, J.; Zhu, X.; Jiang, Y.; Wei, Z.; Sun, S. Information age-delay correlation and optimization with finite block length. IEEE Trans. Commun. 2021, 69, 7236–7250. [Google Scholar] [CrossRef]
- Kim, Y. Minimizing age of information in slotted ALOHA with short-packet communications. IEEE Access 2024, 12, 186779–186793. [Google Scholar] [CrossRef]
- Yu, B.; Cai, Y.; Wu, D.; Xiang, Z. Average age of information in short packet based machine type communication. IEEE Trans. Veh. Technol. 2020, 69, 10306–10319. [Google Scholar] [CrossRef]
- Zheng, D.; Yang, Y.; Wei, L.; Jiao, B. Decode-and-forward short-packet relaying in the Internet of Things: Timely status updates. IEEE Trans. Wirel. Commun. 2021, 20, 8423–8437. [Google Scholar] [CrossRef]
- Xie, M.; Jia, X.; Yin, J.; Wang, Q.; Zhou, M. Age of information for partial earliest relay aided short packet status update with energy harvesting. IEEE Trans. Wirel. Commun. 2024, 23, 699–719. [Google Scholar] [CrossRef]
- Bedewy, A.M.; Sun, Y.; Shroff, N.B. Minimizing the age of information through queues. IEEE Trans. Inf. Theory 2019, 65, 5215–5232. [Google Scholar] [CrossRef]
- Moltafet, M.; Leinonen, M.; Codreanu, M. On the age of information in multi-source queueing models. IEEE Trans. Commun. 2020, 68, 5003–5017. [Google Scholar] [CrossRef]
- Kahraman, İ.; Köse, A.; Koca, M.; Anarım, E. Age of information in Internet of Things: A survey. IEEE Internet Things J. 2023, 11, 9896–9914. [Google Scholar] [CrossRef]
- Abbas, Q.; Hassan, S.A.; Qureshi, H.K.; Dev, K.; Jung, H. A comprehensive survey on age of information in massive IoT networks. Comput. Commun. 2023, 197, 199–213. [Google Scholar] [CrossRef]
- Li, A.; Wu, S.; Jiao, J.; Zhang, N.; Zhang, Q. Age of information with Hybrid-ARQ: A unified explicit result. IEEE Trans. Commun. 2022, 70, 7899–7914. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, R.; Ren, J.; Wang, F.; Wang, S.; Yu, J. On AoI of grant-free access with HARQ. IEEE Trans. Commun. 2024, 72, 924–937. [Google Scholar] [CrossRef]
- Pan, H.; Chan, T.-T.; Leung, V.C.M.; Li, J. Age of information in physical-layer network coding enabled two-way relay networks. IEEE Trans. Mob. Comput. 2023, 22, 4485–4499. [Google Scholar] [CrossRef]
- Kahraman, İ.; Köse, A.; Koca, M.; Anarim, E. Impact of network coding on age of information in multi-source multi-hop IoT networks. IEEE Internet Things J. 2024, 11, 33053–33063. [Google Scholar] [CrossRef]
- Bae, Y.H.; Baek, J.W. Age of information and throughput in random access-based IoT systems with periodic updating. IEEE Wirel. Commun. Lett. 2022, 11, 821–825. [Google Scholar] [CrossRef]
- Al-Qurabat, A.K.M.; Abdulzahra, S.A. An overview of periodic wireless sensor networks to the Internet of Things. IOP Conf. Ser. Mater. Sci. Eng. 2020, 928, 032055. [Google Scholar] [CrossRef]
- Chen, L.; Dong, Y. Estimating age of information in wireless systems with unknown distributions of inter-arrival/service time. IEEE Trans. Netw. Sci. Eng. 2024, 11, 6090–6104. [Google Scholar] [CrossRef]
- Yates, R.D.; Sun, Y.; Brown, D.R.; Kaul, S.K.; Modiano, E.; Ulukus, S. Age of information: An introduction and survey. IEEE J. Sel. Areas Commun. 2021, 39, 1183–1210. [Google Scholar] [CrossRef]
- Burden, R.L.; Faires, J.D. Numerical Analysis, 9th ed.; Brooks/Cole Cengage Learning: Boston, MA, USA, 2011. [Google Scholar]
- Singh, A.; Danish, S.M.; Prasad, G.; Kumar, S. A unified α–η–κ–μ fading model based real-time localization on IoT edge devices. IEEE Trans. Netw. Sci. Eng. 2024, 11, 6207–6218. [Google Scholar] [CrossRef]
- Blagojević, V.; Kozić, N.; Cvetković, A.; Ivaniš, P. Secrecy outage performance analysis of wirelessly powered IoT system with randomly moving receiving nodes. Sensors 2025, 25, 1386. [Google Scholar] [CrossRef]
- Han, C.; Gu, Y.; Li, Y.; Vucetic, B. Optimal blocklength allocation towards reduced age of information in wireless sensor networks. In Proceedings of the IEEE GLOBECOM Workshops, Waikoloa, HI, USA, 9–13 December 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Li, J.; Tang, J.; Liu, Z. On the data freshness for industrial Internet of Things with mobile-edge computing. IEEE Internet Things J. 2022, 9, 13542–13554. [Google Scholar] [CrossRef]
- Sung, H.; Kim, M.; Lee, S.; Lee, J. Age of information analysis for finite blocklength regime in downlink cellular networks. IEEE Wirel. Commun. Lett. 2022, 11, 683–687. [Google Scholar] [CrossRef]
- Makki, B.; Svensson, T.; Zorzi, M. Finite block-length analysis of spectrum sharing networks using rate adaptation. IEEE Trans. Commun. 2015, 63, 2823–2835. [Google Scholar] [CrossRef]
- Cao, J.; Zhu, X.; Jiang, Y.; Wei, Z. Can AoI and delay be minimized simultaneously with short-packet transmission? In Proceedings of the IEEE INFOCOM Workshops, Vancouver, BC, Canada, 10–13 May 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Yang, W.; Lu, X.; Yan, S.; Shu, F.; Li, Z. Age of information for short-packet covert communication. IEEE Wirel. Commun. Lett. 2021, 10, 1890–1894. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Number of sensors N | 30 |
| System bandwidth B | 1 |
| Information bits per status packet S | 100 bits |
| Average SNR | 1 dB, 3 dB, 5 dB |
| Average SNR (dB) | Optimal Group Size | Optimal Blocklengths |
|---|---|---|
| 1 | 2 | |
| 3 | 2 | |
| 5 | 2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chung, J.-H.; Kim, Y. Minimization of Average Peak Age of Information for Timely Status Updates in Two-Hop IoT Networks. Appl. Sci. 2025, 15, 7042. https://doi.org/10.3390/app15137042
Chung J-H, Kim Y. Minimization of Average Peak Age of Information for Timely Status Updates in Two-Hop IoT Networks. Applied Sciences. 2025; 15(13):7042. https://doi.org/10.3390/app15137042
Chicago/Turabian StyleChung, Jin-Ho, and Yoora Kim. 2025. "Minimization of Average Peak Age of Information for Timely Status Updates in Two-Hop IoT Networks" Applied Sciences 15, no. 13: 7042. https://doi.org/10.3390/app15137042
APA StyleChung, J.-H., & Kim, Y. (2025). Minimization of Average Peak Age of Information for Timely Status Updates in Two-Hop IoT Networks. Applied Sciences, 15(13), 7042. https://doi.org/10.3390/app15137042