
Utilizing Multivariate Adaptive Regression Splines (MARS) for Precise Estimation of Soil Compaction Parameters
 , , ,
, , ,  and
and
Abstract
:1. Introduction
2. Research Significance
3. Materials and Methods
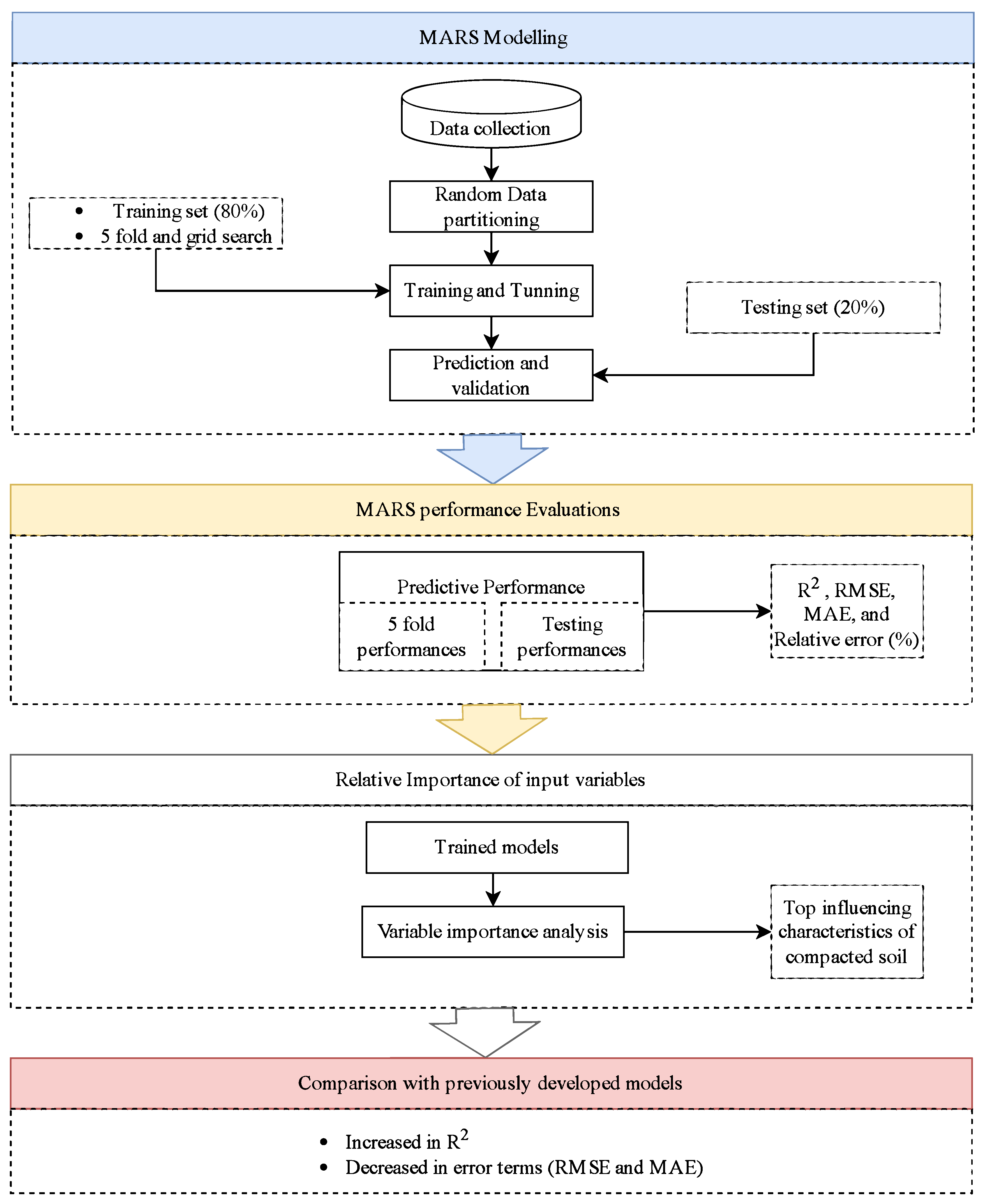
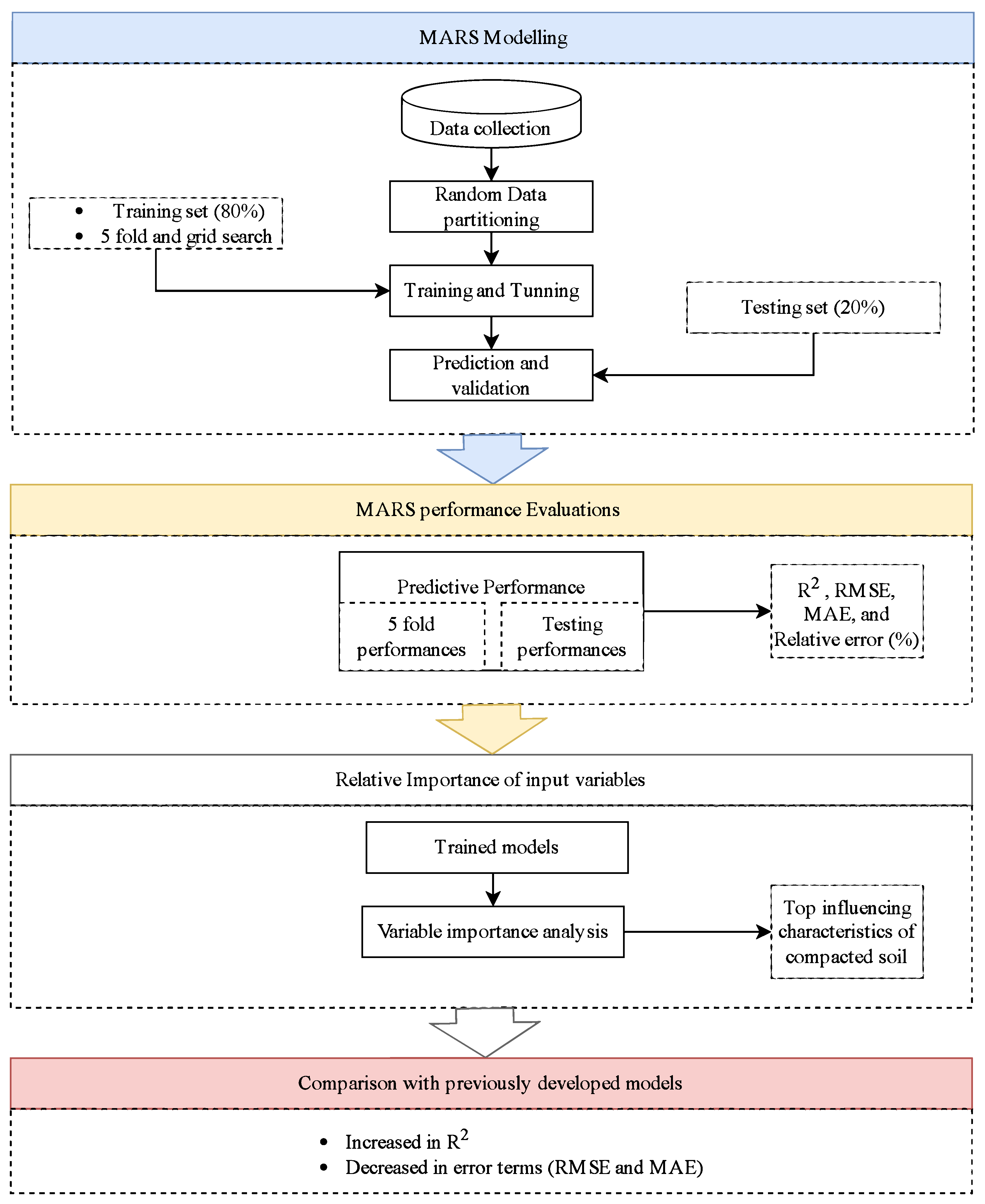
3.1. Research Methodology
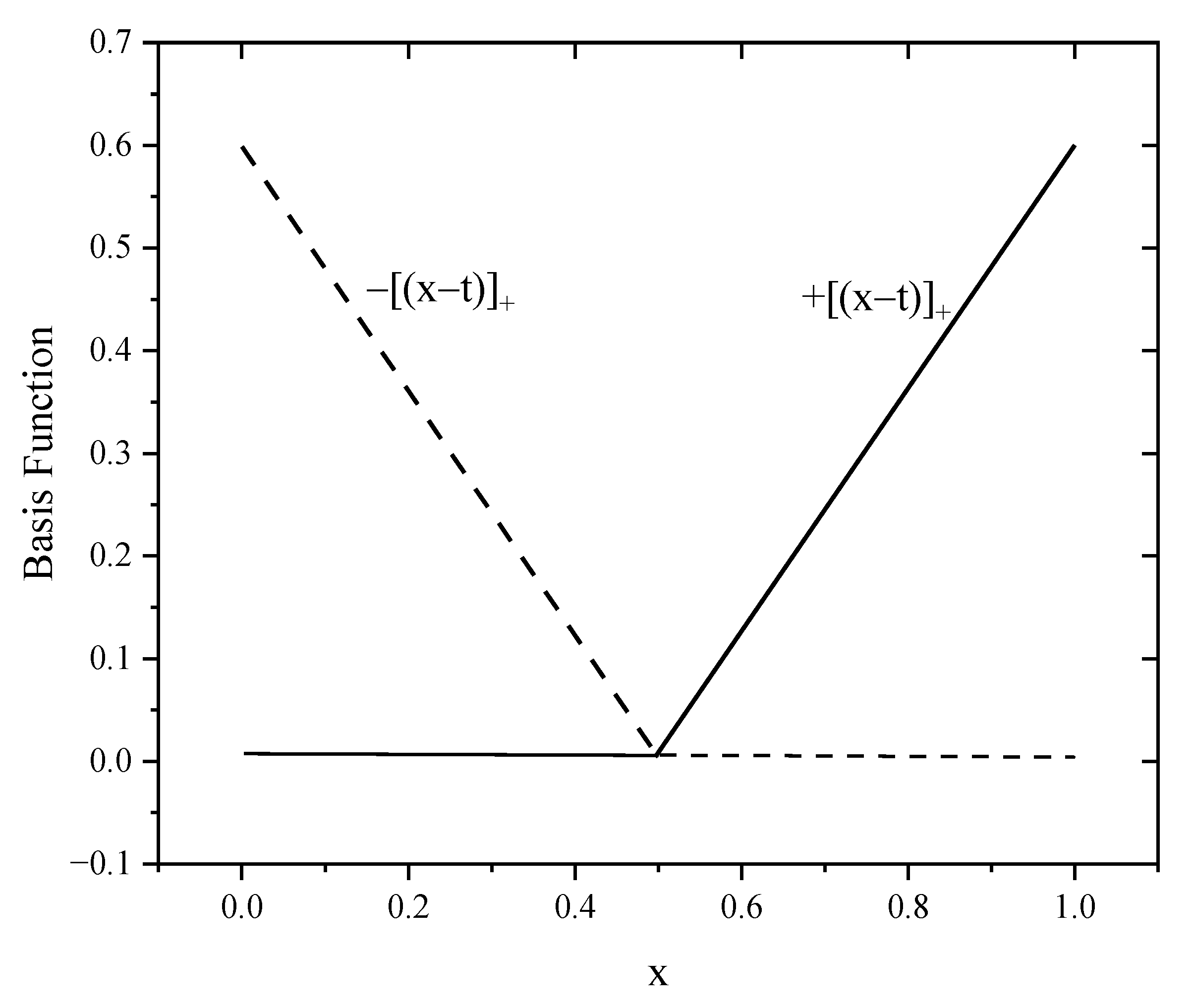
3.2. Multivariate Adaptive Regression Splines (MARS)
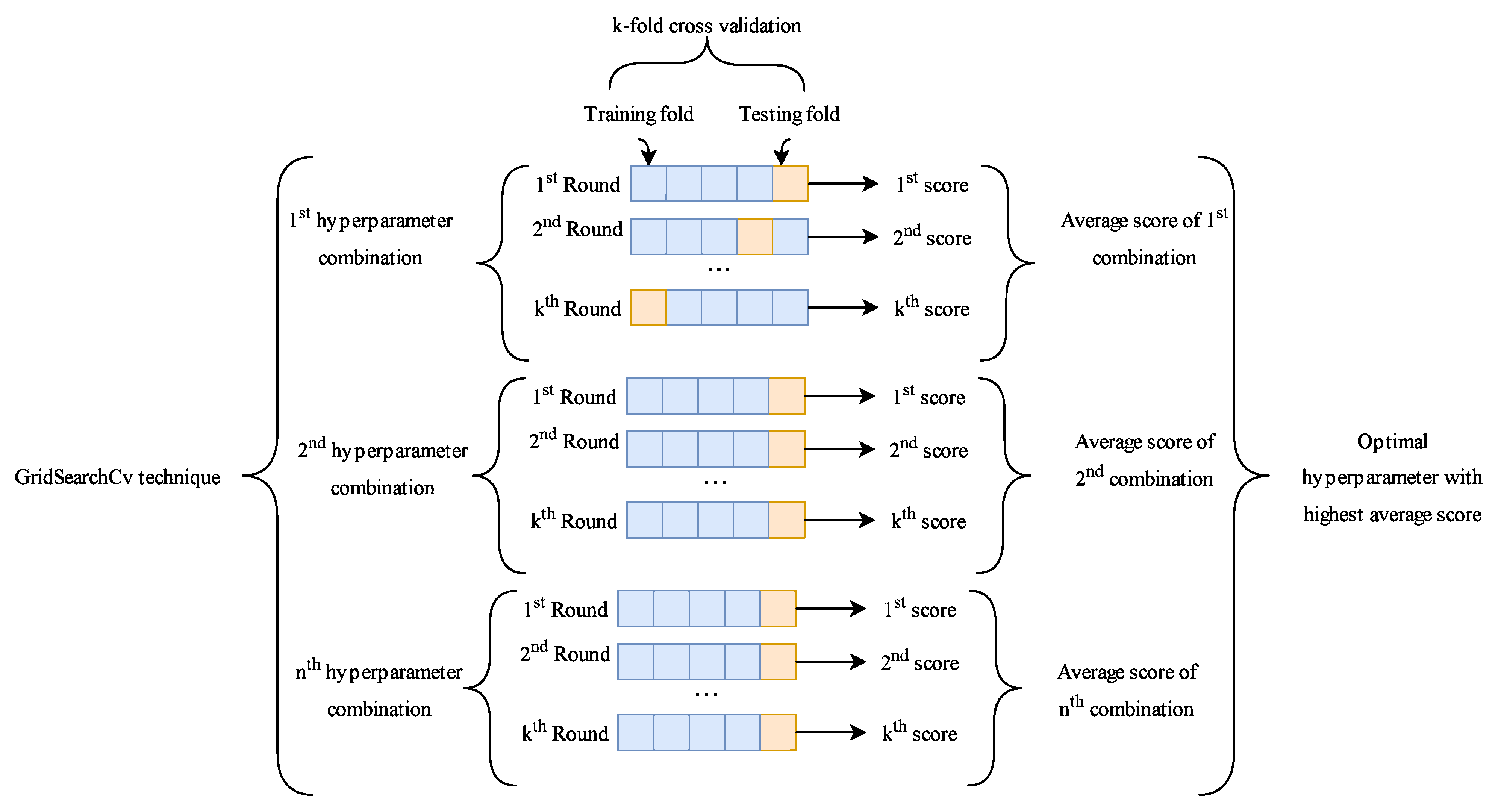
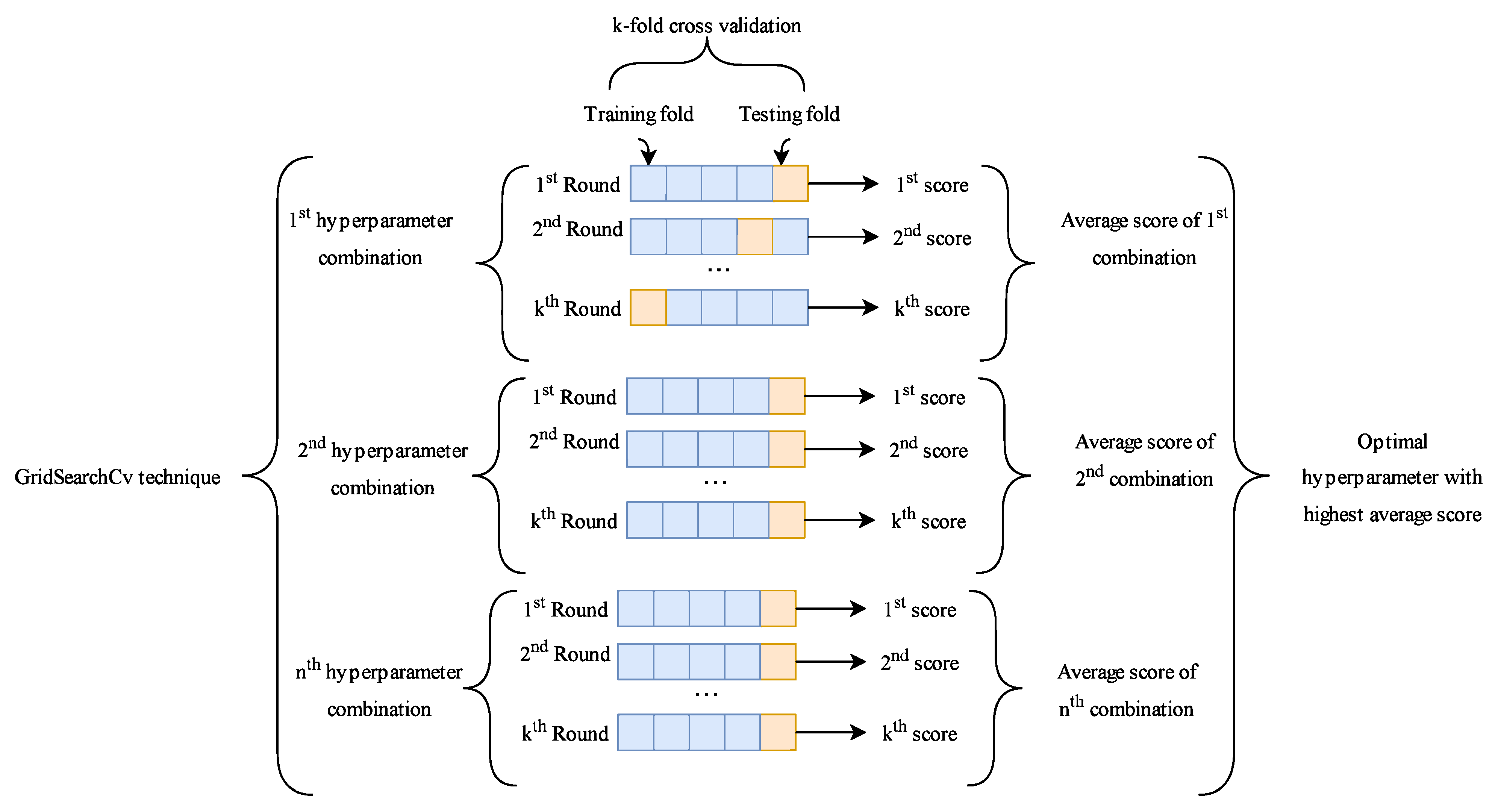
3.3. Hyperparameter Tuning Procedure
3.4. Performance Metrics
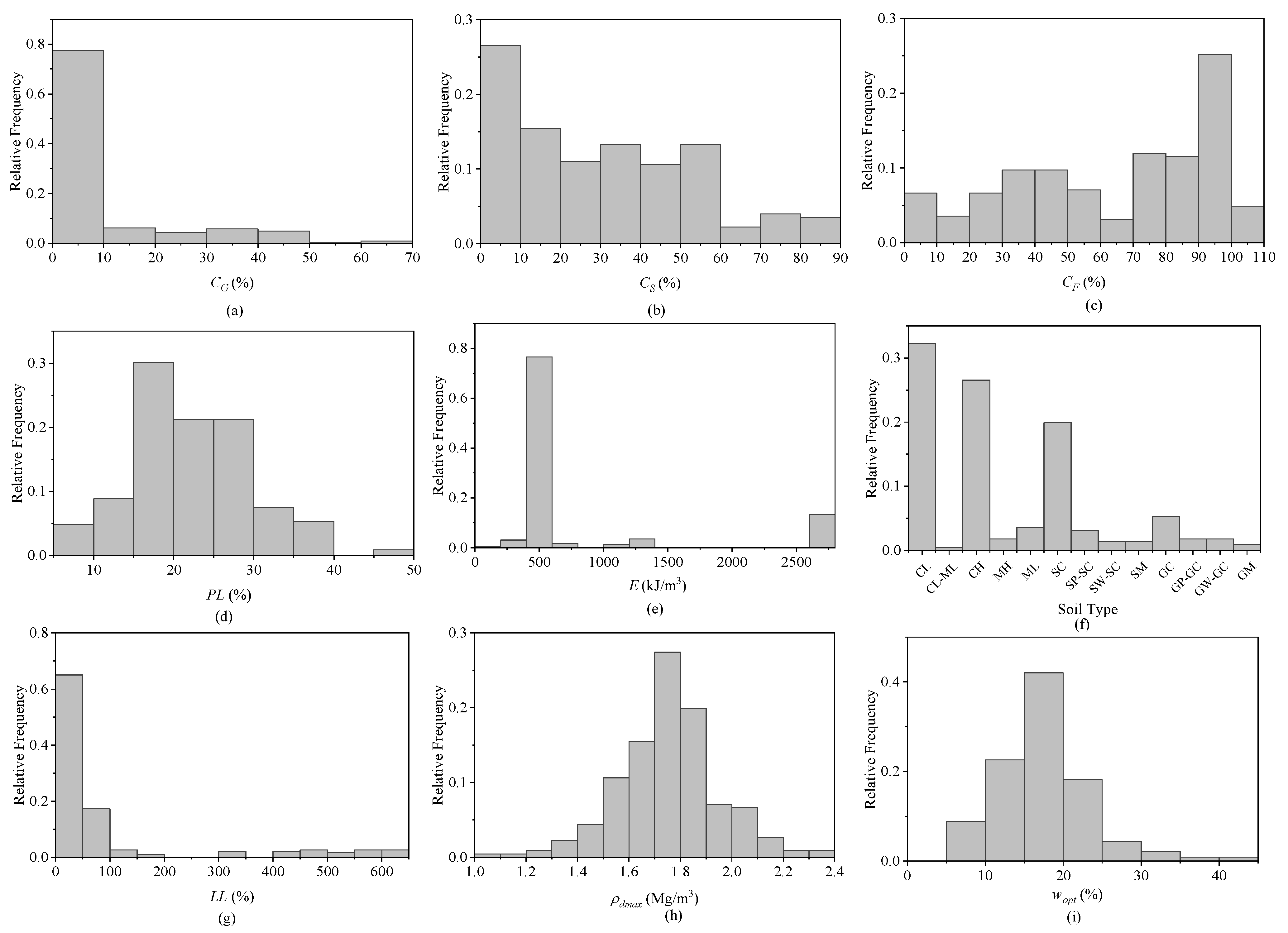
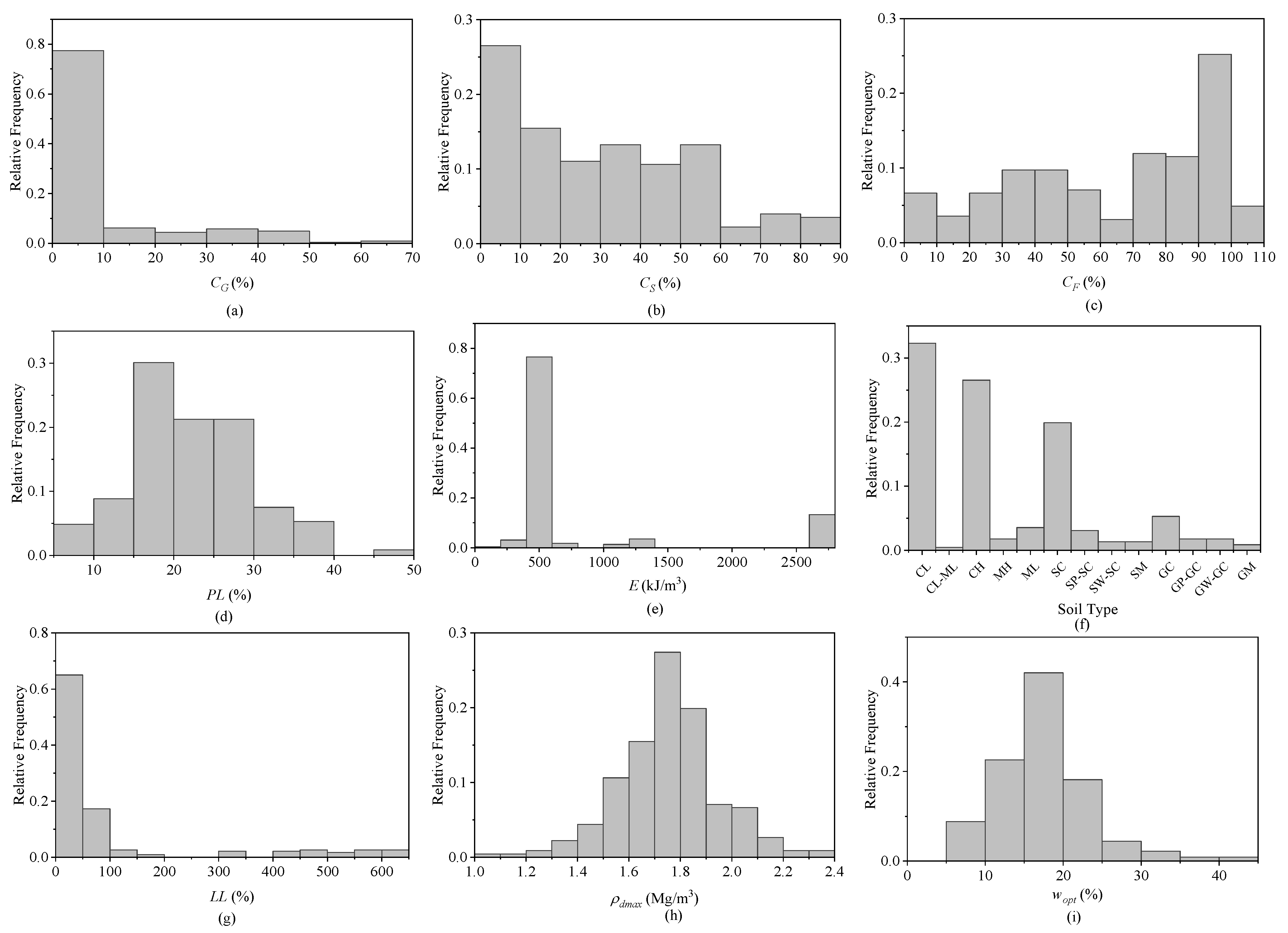
4. Database Used
5. Model Results
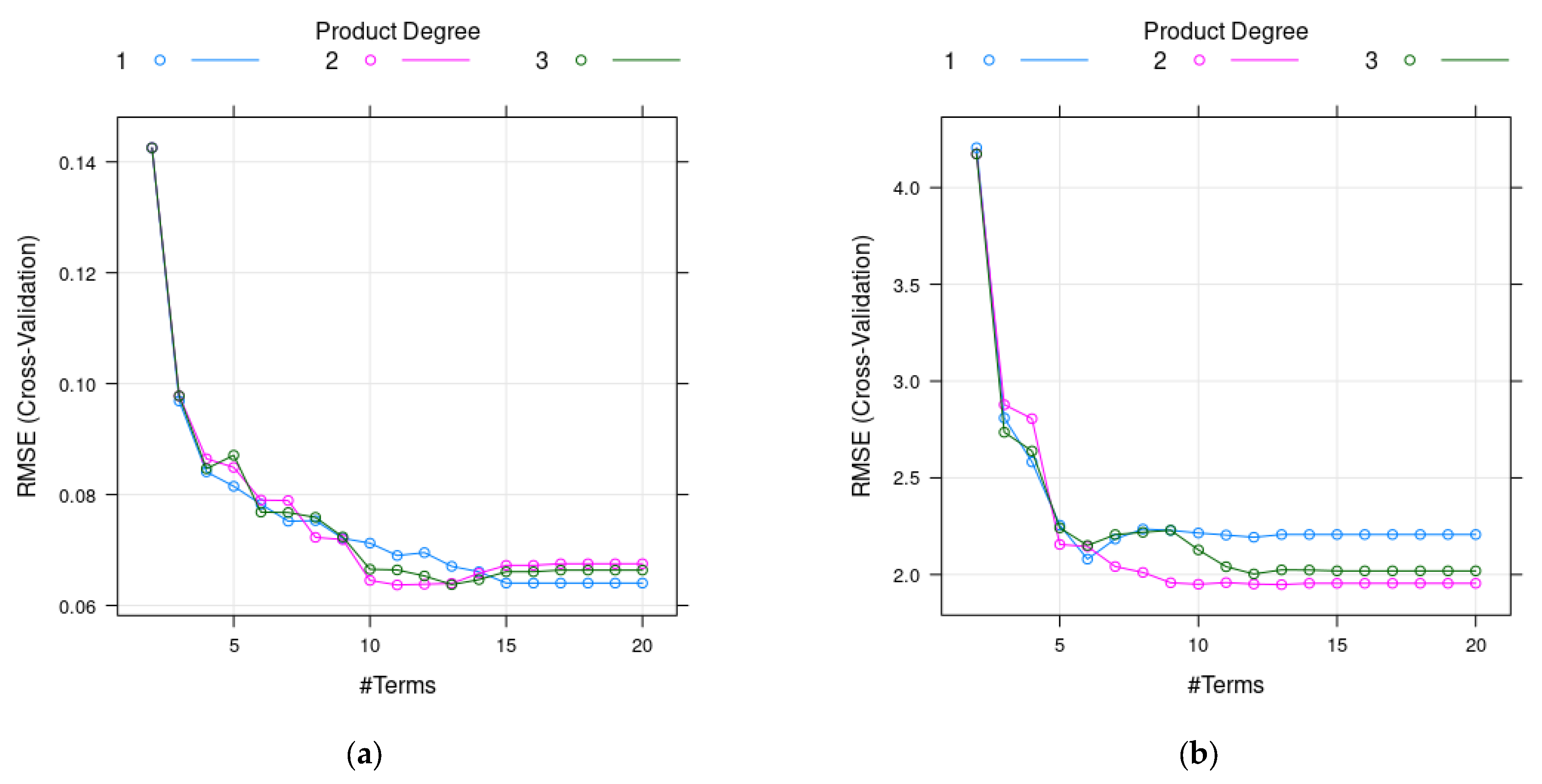
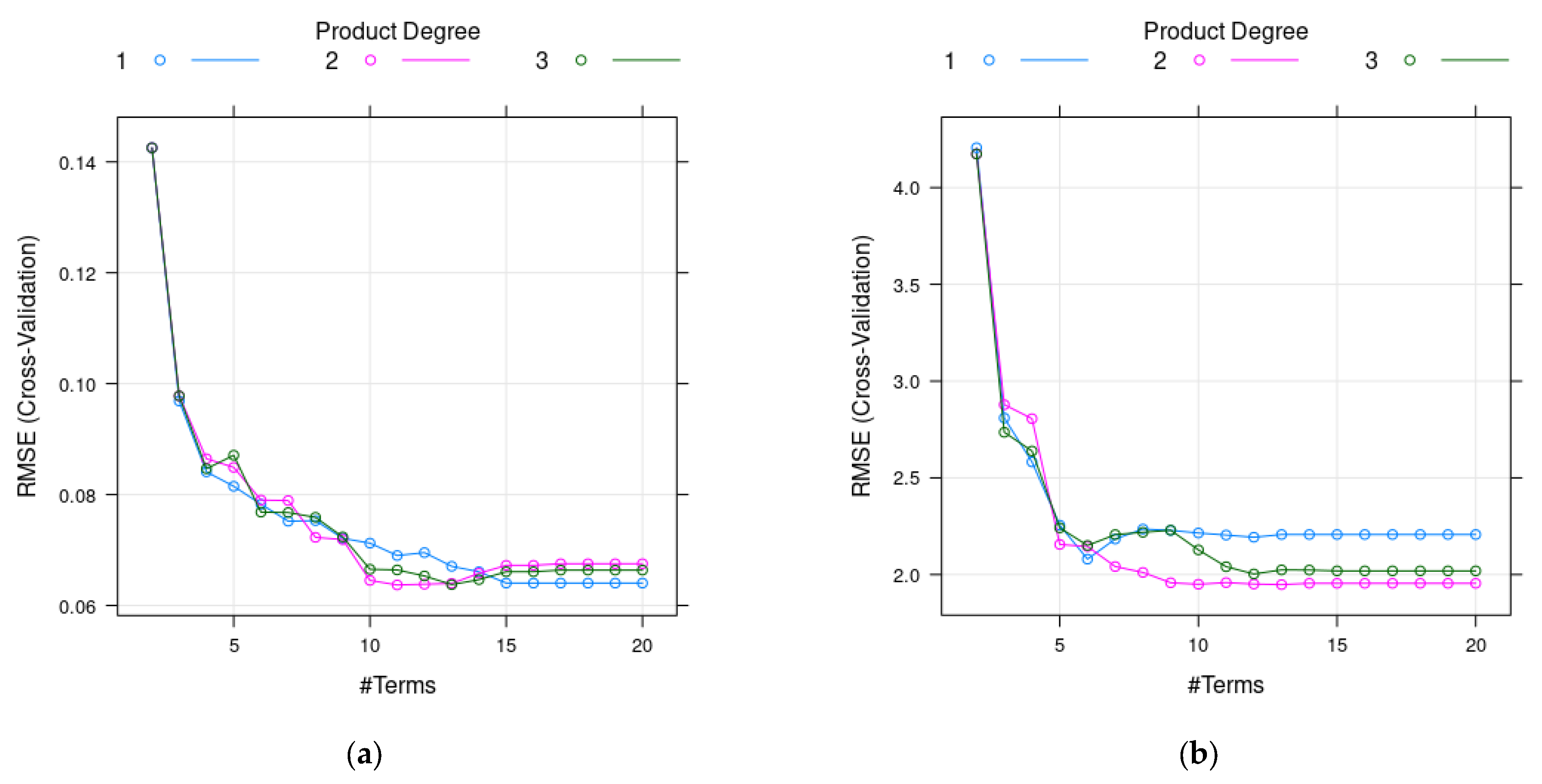
5.1. Hyperparameter Tuning Results for Optimal Model
5.2. Cross-Validation Results after Hyperparameter Tuning

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Folds | Performance Measures | ||
|---|---|---|---|
| RMSE (%) | R2 | MAE (%) | |
| Fold 1 | 1.513 | 0.929 | 1.182 |
| Fold 2 | 2.368 | 0.870 | 1.867 |
| Fold 3 | 1.827 | 0.886 | 1.351 |
| Fold 4 | 1.710 | 0.889 | 1.361 |
| Fold 5 | 2.323 | 0.895 | 1.728 |
| Average | 1.948 | 0.893 | 1.498 |
| SD | 0.380 | 0.023 | 0.287 |
| CoV (%) | 0.195 | 0.026 | 0.192 |
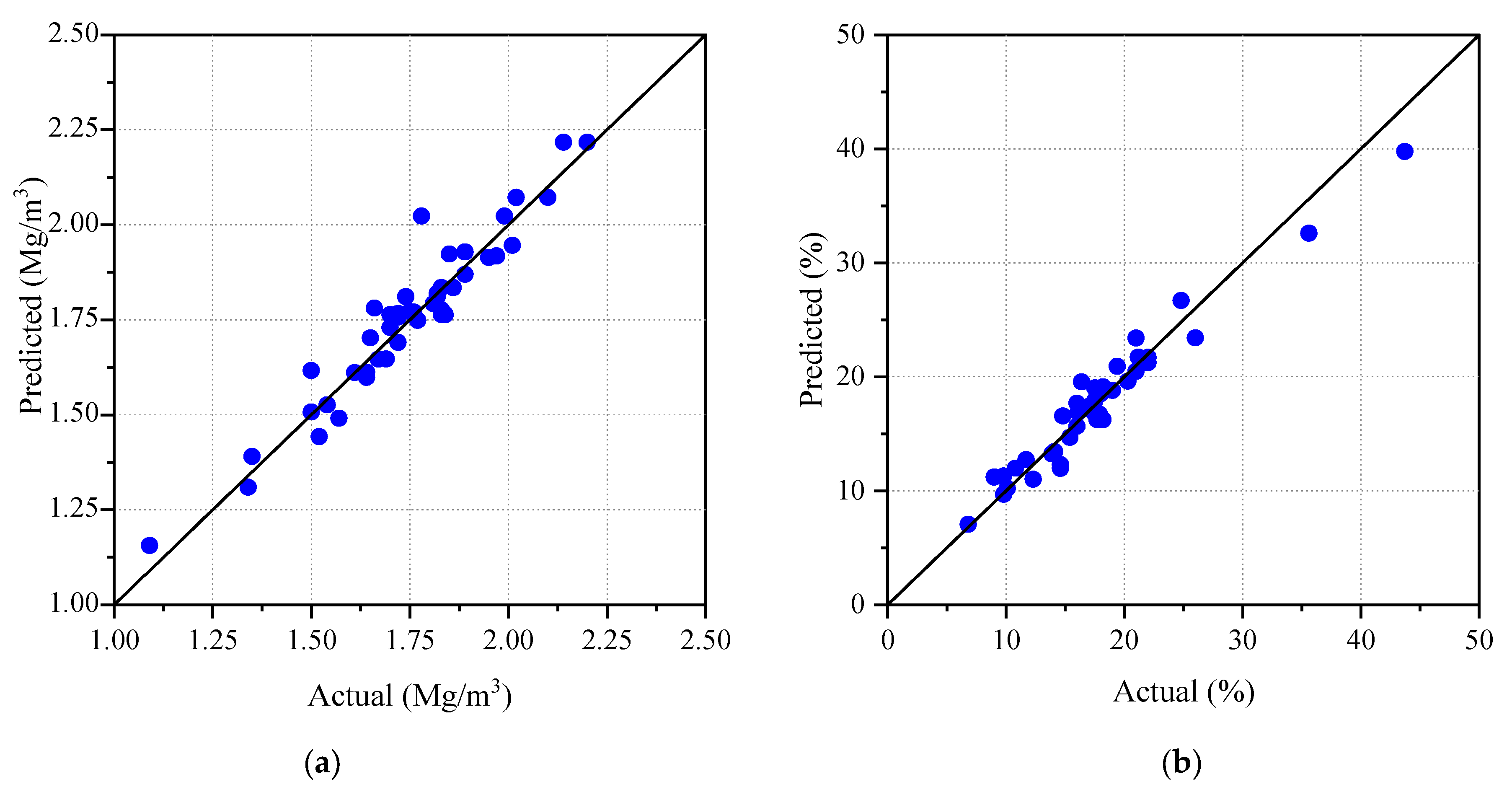
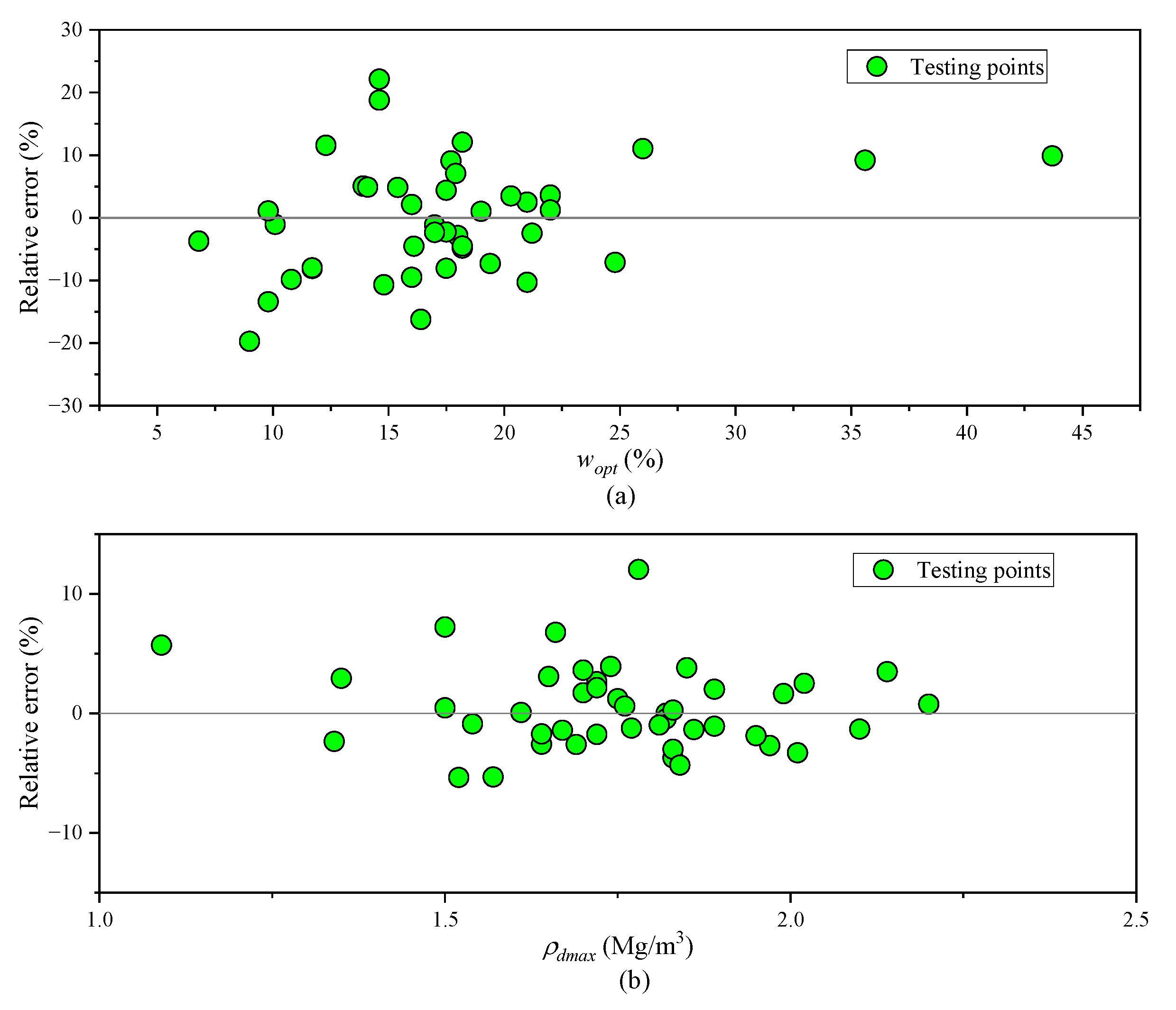
5.3. Evaluation of MARS Models on Unseen Dataset
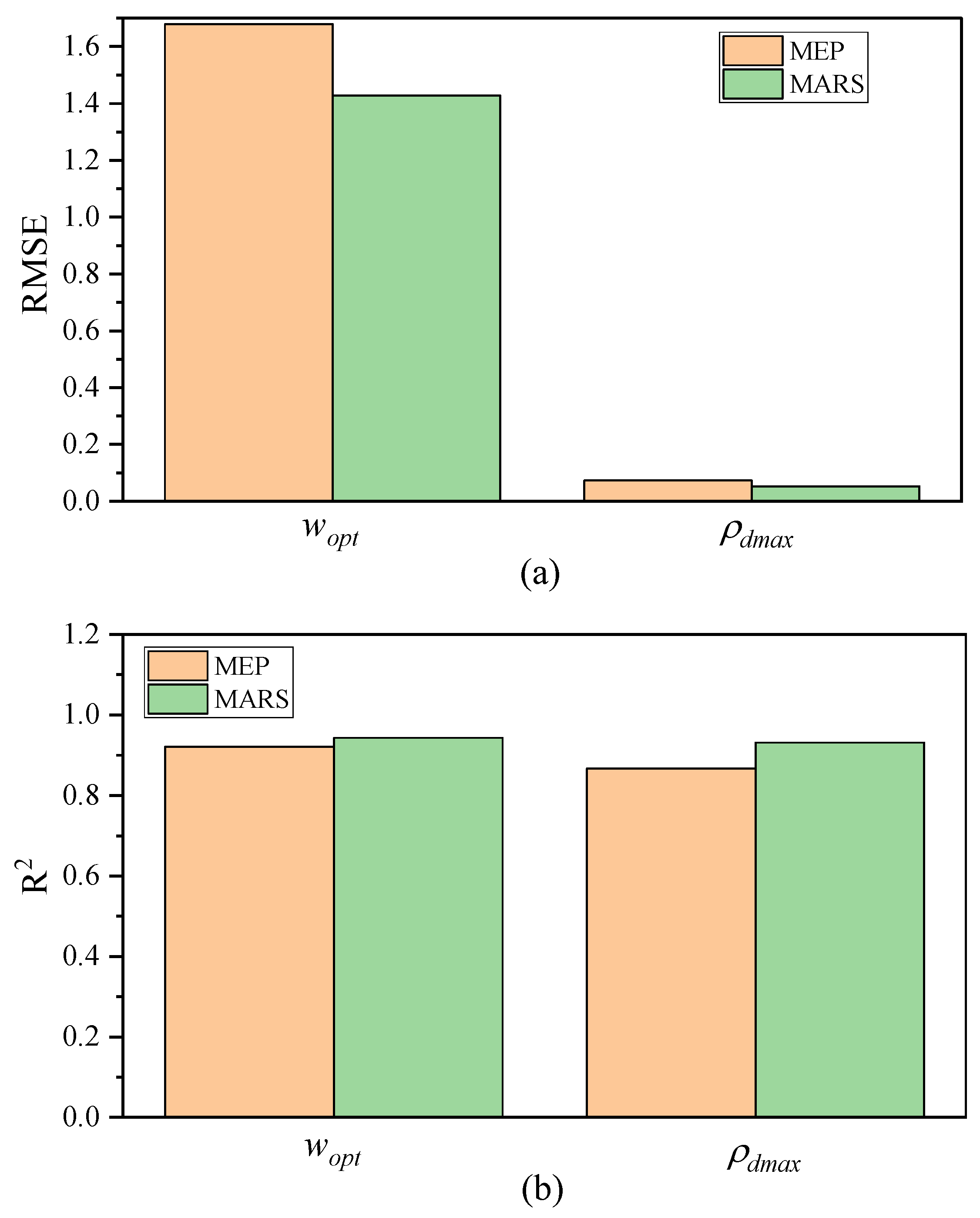
5.4. Comparison between MARS Model with Previously Developed Models
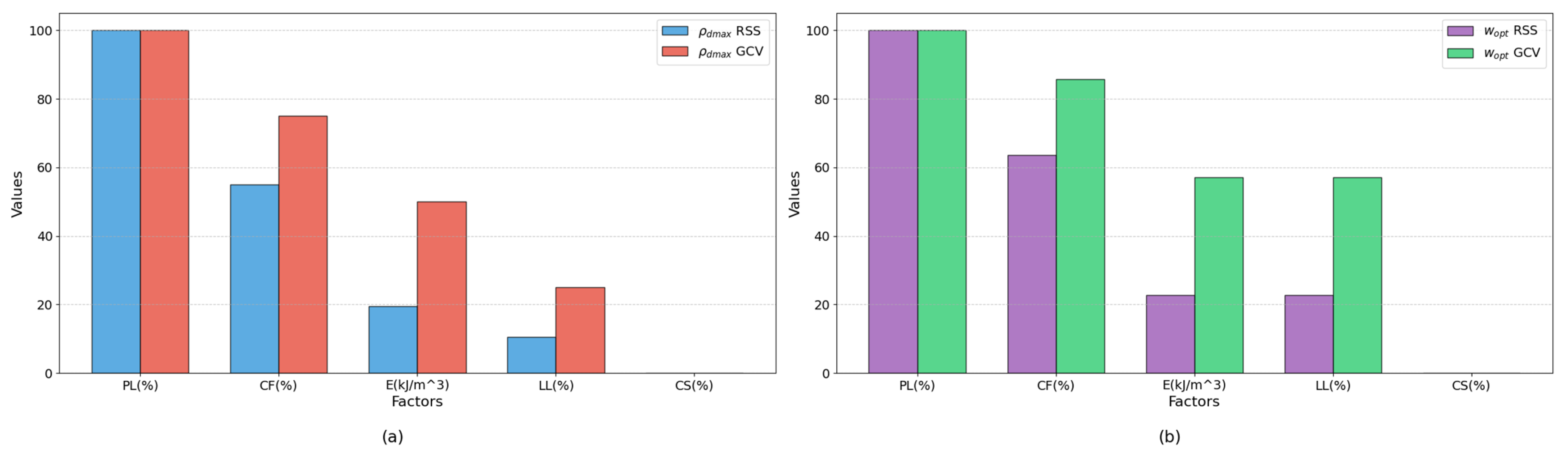
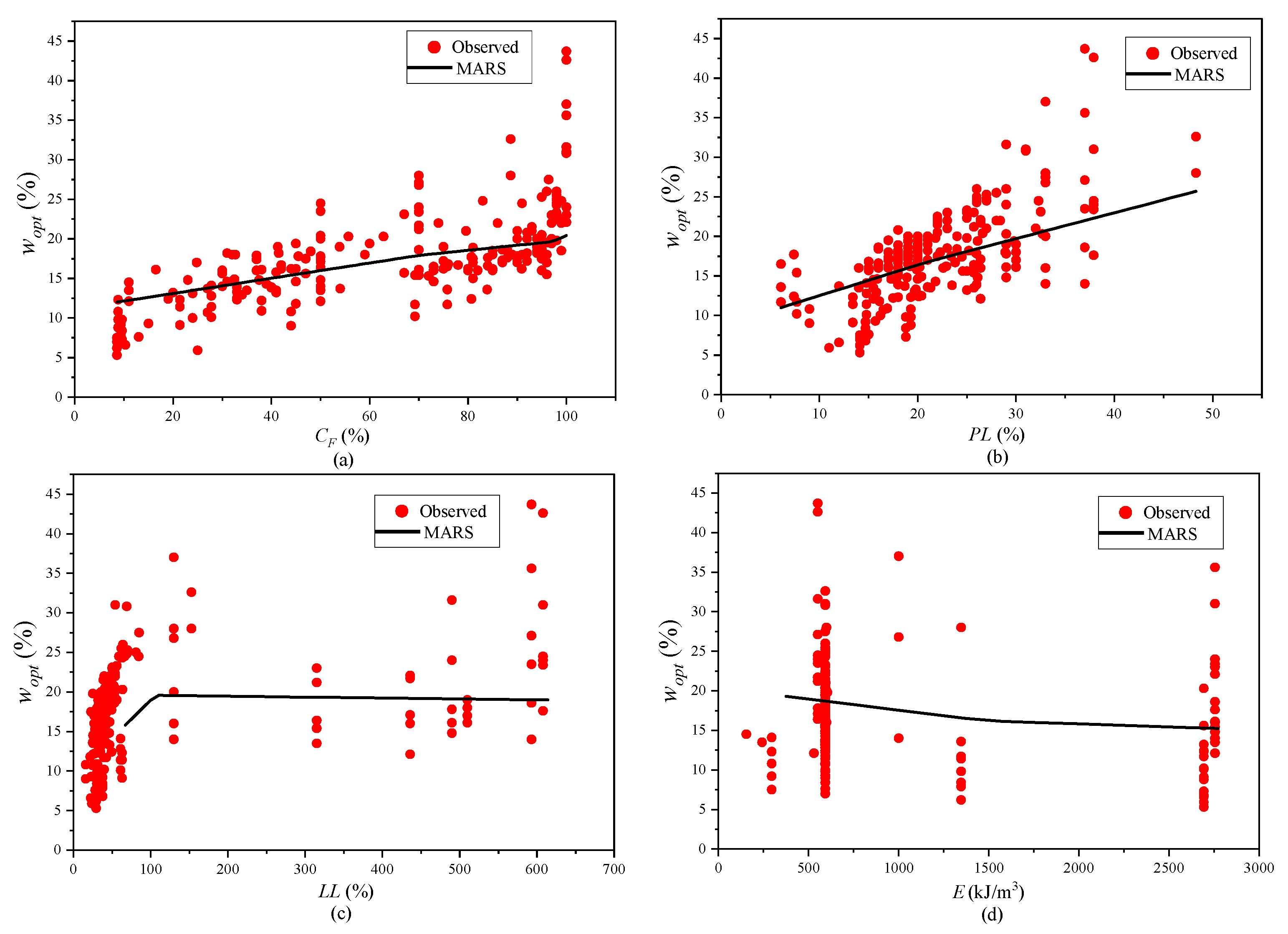
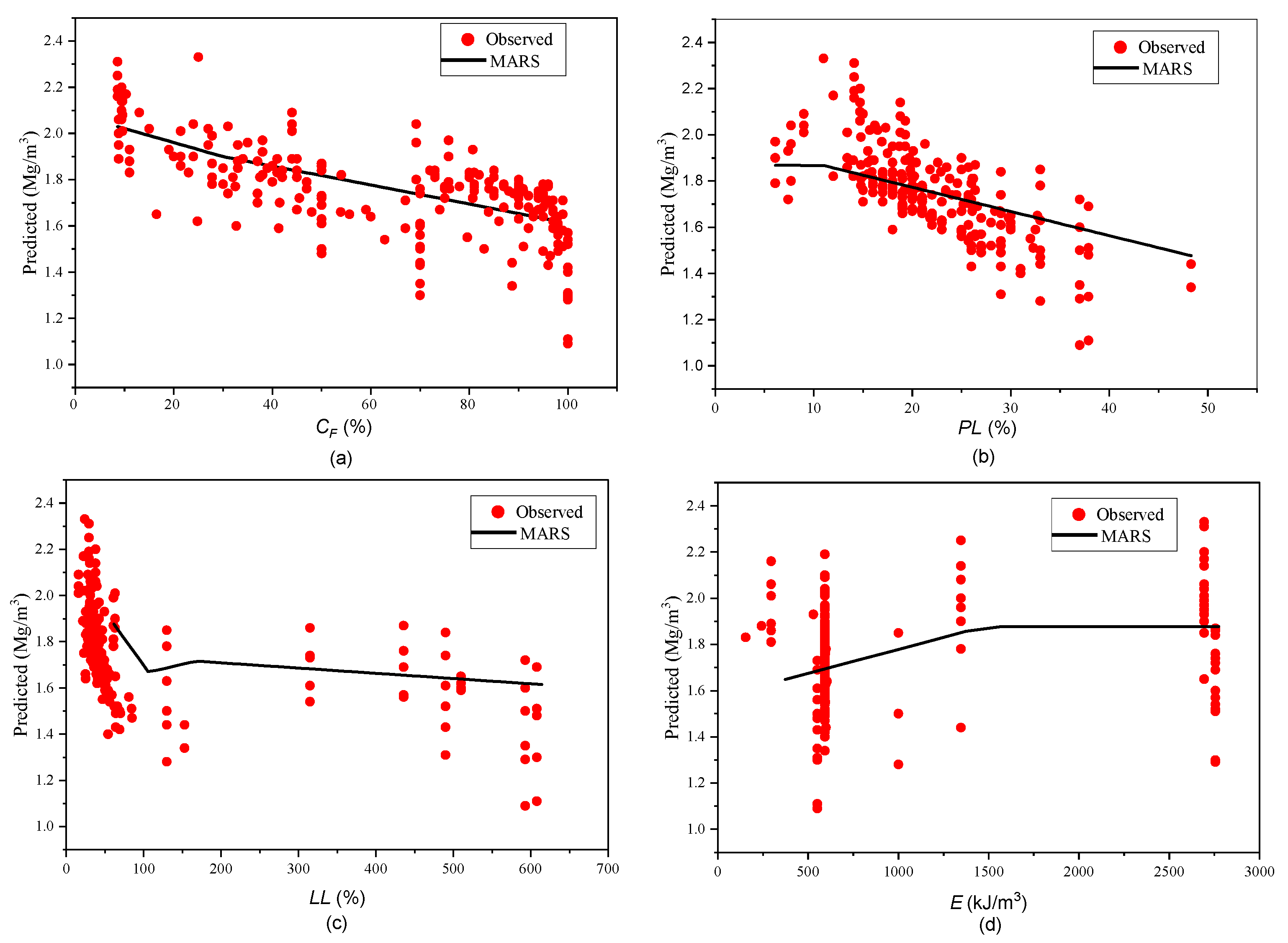
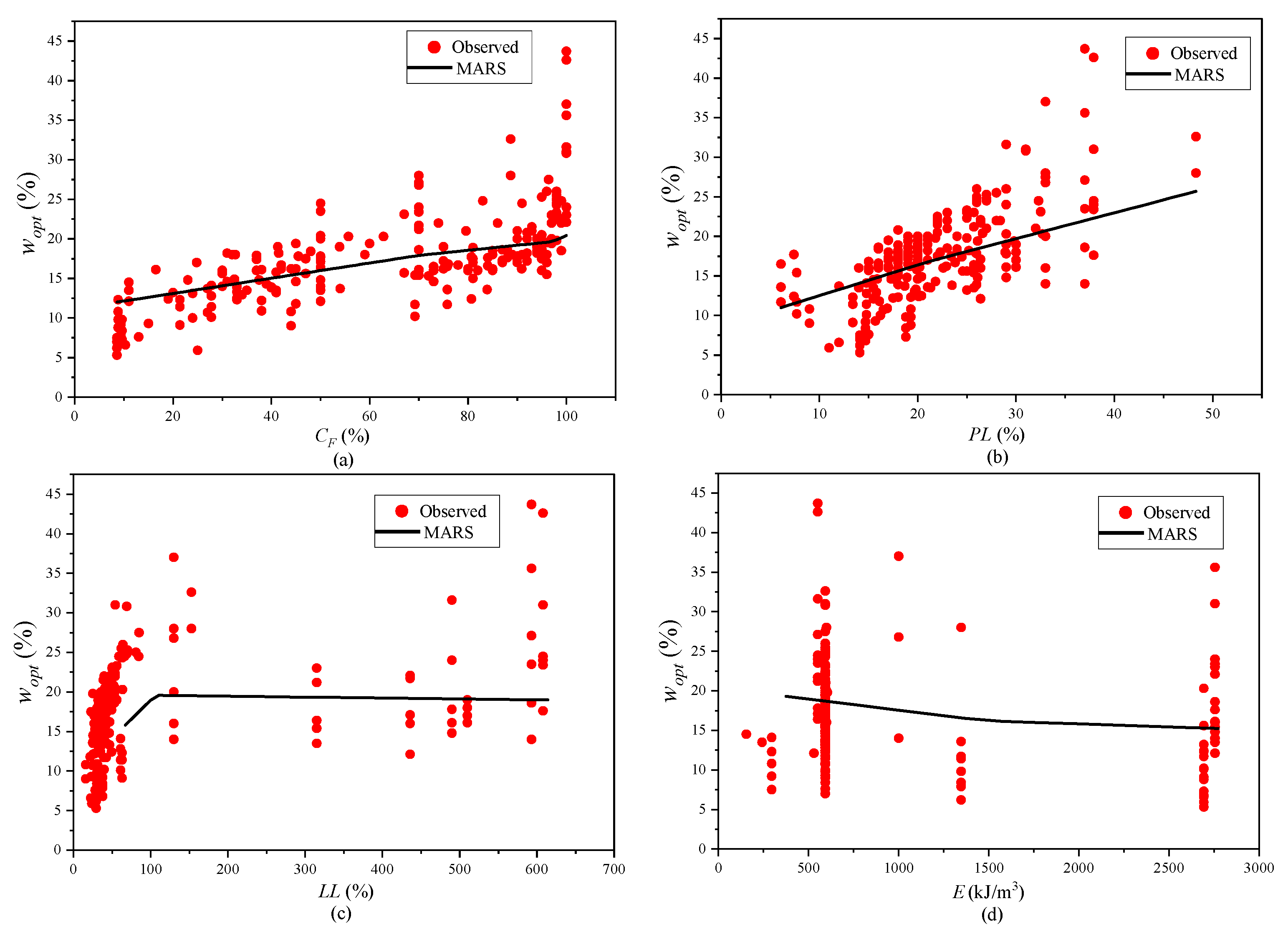
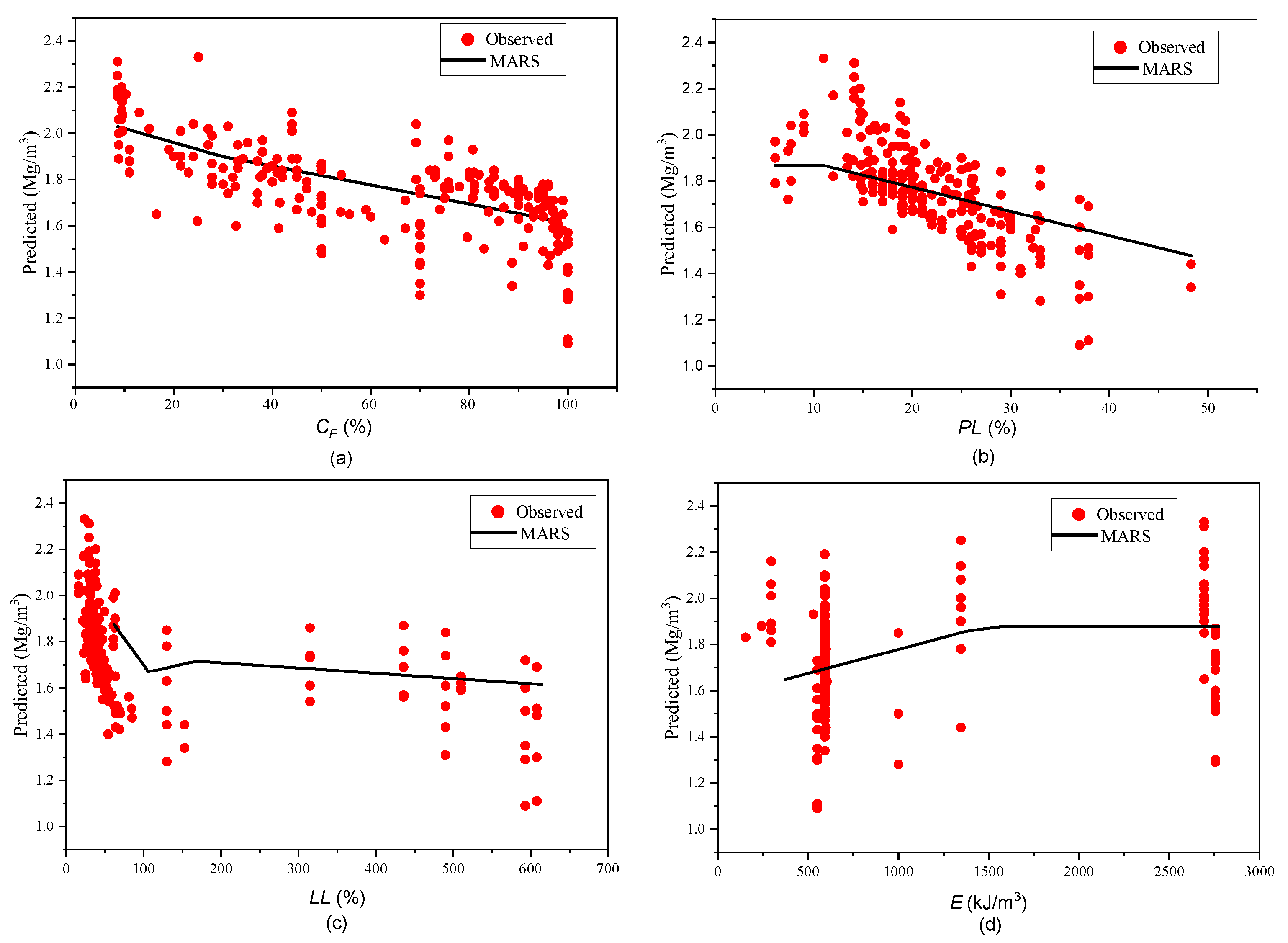
5.5. Variable Importance Analysis
- The raw residual sum-of-squares (RSS) method proceeds in two phases. Initially, it assesses the RSS decrease for each subset, contrasting it with the preceding subset’s value. Subsequently, for every relevant feature, it accumulates these reductions across all subsets that incorporate that feature. Finally, the overall sum of these reductions is analyzed. Features leading to substantial RSS declines hold greater importance.
- The generalized cross-validation (GCV) method operates analogously to the RSS method, but it employs GCV in place of RSS. GCV assesses feature performance in subsets, pinpointing the most pivotal subset (with smaller GCV values being preferable).
6. Conclusions
- Hyperparameter tuning of the MARS model significantly enhanced its predictive performance, reducing the error rate and refining the model’s adaptability to complex geotechnical data.
- The final optimal models for parameters wopt and ρdmax were evaluated using five-fold cross-validation. The findings showed consistency and high accuracy across all folds, demonstrating the model’s robustness and reliability in estimating these critical parameters.
- Testing the models on unseen data (testing dataset) revealed that they maintained a commendable level of precision and generalization, further substantiating their efficacy for real-world applications in geotechnical projects.
- Comparing the MARS model with other state-of-the-art models, such as Multi Expression Programming (MEP), indicated that while both models exhibit strong predictive capabilities, MARS demonstrated faster convergence and better handling of non-linear relationships, offering a more efficient and robust alternative for geotechnical parameter prediction.
- Finally, the variable importance analysis revealed that the fine content (CF) and plasticity limit (PL) are the most influential factors driving the predictive accuracy of the model, highlighting their pivotal role in determining the geotechnical properties under study.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Verma, G.; Kumar, B. Prediction of compaction parameters for fine-grained and coarse-grained soils: A review. Int. J. Geotech. Eng. 2020, 14, 970–977. [Google Scholar] [CrossRef]
- Proctor, R. Fundamental principles of soil compaction. Eng. News-Rec. 1933, 111, 245–248, 286–289, 348–351. [Google Scholar]
- Hussain, A.; Atalar, C. Estimation of compaction characteristics of soils using Atterberg limits. Proc. IOP Conf. Ser. Mater. Sci. Eng. 2020, 800, 012024. [Google Scholar] [CrossRef]
- Rimbarngaye, A.; Mwero, J.N.; Ronoh, E.K. Effect of gum Arabic content on maximum dry density and optimum moisture content of laterite soil. Heliyon 2022, 8, e11553. [Google Scholar] [CrossRef]
- Spagnoli, G.; Shimobe, S. An overview on the compaction characteristics of soils by laboratory tests. Eng. Geol. 2020, 278, 105830. [Google Scholar] [CrossRef]
- Ren, X.-C.; Lai, Y.-M.; Zhang, F.-Y.; Hu, K. Test method for determination of optimum moisture content of soil and maximum dry density. KSCE J. Civ. Eng. 2015, 19, 2061–2066. [Google Scholar] [CrossRef]
- Lim, Y.Y.; Miller, G.A. Wetting-induced compression of compacted Oklahoma soils. J. Geotech. Geoenviron. Eng. 2004, 130, 1014–1023. [Google Scholar] [CrossRef]
- Delage, P.; Marcial, D.; Cui, Y.; Ruiz, X. Ageing effects in a compacted bentonite: A microstructure approach. Géotechnique 2006, 56, 291–304. [Google Scholar] [CrossRef]
- Rahman, F.; Hossain, M.; Hunt, M.; Romanoschi, S. Soil stiffness evaluation for compaction control of cohesionless embankments. Geotech. Test. J. 2008, 31, 442–451. [Google Scholar]
- Di Matteo, L.; Bigotti, F.; Ricco, R. Best-fit models to estimate modified proctor properties of compacted soil. J. Geotech. Geoenviron. Eng. 2009, 135, 992–996. [Google Scholar] [CrossRef]
- Sun, D.a.; Cui, H.; Sun, W. Swelling of compacted sand–bentonite mixtures. Appl. Clay Sci. 2009, 43, 485–492. [Google Scholar] [CrossRef]
- Zhao, L.-S.; Zhou, W.-H.; Yuen, K.-V. A simplified axisymmetric model for column supported embankment systems. Comput. Geotech. 2017, 92, 96–107. [Google Scholar] [CrossRef]
- Chen, R.-P.; Wang, H.-L.; Hong, P.-Y.; Cui, Y.-J.; Qi, S.; Cheng, W. Effects of degree of compaction and fines content of the subgrade bottom layer on moisture migration in the substructure of high-speed railways. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2018, 232, 1197–1210. [Google Scholar] [CrossRef]
- Chen, R.-P.; Qi, S.; Wang, H.-L.; Cui, Y.-J. Microstructure and hydraulic properties of coarse-grained subgrade soil used in high-speed railway at various compaction degrees. J. Mater. Civ. Eng. 2019, 31, 04019301. [Google Scholar] [CrossRef]
- Ardakani, A.; Kordnaeij, A. Soil compaction parameters prediction using GMDH-type neural network and genetic algorithm. Eur. J. Environ. Civ. Eng. 2019, 23, 449–462. [Google Scholar] [CrossRef]
- Wang, H.-L.; Chen, R.-P. Estimating static and dynamic stresses in geosynthetic-reinforced pile-supported track-bed under train moving loads. J. Geotech. Geoenviron. Eng. 2019, 145, 04019029. [Google Scholar] [CrossRef]
- Benbouras, M.A.; Lefilef, L. Progressive machine learning approaches for predicting the soil compaction parameters. Transp. Infrastruct. Geotechnol. 2023, 10, 211–238. [Google Scholar] [CrossRef]
- ASTM D698; Standard Test Methods for Laboratory Compaction Characteristics of Soil Using Standard Effort (12,400 ft-lbf/ft3 (600 kN-m/m3)). ASTM International: West Conshohocken, PA, USA, 2021; p. 13.
- ASTM D1557; Standard Test Methods for Laboratory Compaction Characteristics of Soil Using Modiefied Effort (56,000 ft-lbf/ft3 (2,700 kN-m/m3)). ASTM International: West Conshohocken, PA, USA, 2021; pp. 1–10.
- Blotz, L.R.; Benson, C.H.; Boutwell, G.P. Estimating optimum water content and maximum dry unit weight for compacted clays. J. Geotech. Geoenviron. Eng. 1998, 124, 907–912. [Google Scholar] [CrossRef]
- Omar, M.; Shanableh, A.; Basma, A.; Barakat, S. Compaction characteristics of granular soils in United Arab Emirates. Geotech. Geol. Eng. 2003, 21, 283–295. [Google Scholar] [CrossRef]
- Gurtug, Y.; Sridharan, A. Compaction behaviour and prediction of its characteristics of fine grained soils with particular reference to compaction energy. Soils Found. 2004, 44, 27–36. [Google Scholar] [CrossRef]
- Sridharan, A.; Nagaraj, H. Plastic limit and compaction characteristics of finegrained soils. Proc. Inst. Civ. Eng. Ground Improv. 2005, 9, 17–22. [Google Scholar] [CrossRef]
- Mujtaba, H.; Farooq, K.; Sivakugan, N.; Das, B.M. Correlation between gradational parameters and compaction characteristics of sandy soils. Int. J. Geotech. Eng. 2013, 7, 395–401. [Google Scholar] [CrossRef]
- Farooq, K.; Khalid, U.; Mujtaba, H. Prediction of compaction characteristics of fine-grained soils using consistency limits. Arab. J. Sci. Eng. 2016, 41, 1319–1328. [Google Scholar] [CrossRef]
- Taha, O.M.E.; Majeed, Z.H.; Ahmed, S.M. Artificial neural network prediction models for maximum dry density and optimum moisture content of stabilized soils. Transp. Infrastruct. Geotechnol. 2018, 5, 146–168. [Google Scholar] [CrossRef]
- Othman, K.; Abdelwahab, H. Prediction of the soil compaction parameters using deep neural networks. Transp. Infrastruct. Geotechnol. 2021, 10, 147–164. [Google Scholar] [CrossRef]
- Verma, G.; Kumar, B. Multi-layer perceptron (MLP) neural network for predicting the modified compaction parameters of coarse-grained and fine-grained soils. Innov. Infrastruct. Solut. 2022, 7, 78. [Google Scholar] [CrossRef]
- Bardhan, A.; Singh, R.K.; Ghani, S.; Konstantakatos, G.; Asteris, P.G. Modelling Soil Compaction Parameters Using an Enhanced Hybrid Intelligence Paradigm of ANFIS and Improved Grey Wolf Optimiser. Mathematics 2023, 11, 3064. [Google Scholar] [CrossRef]
- Verma, G.; Kumar, B. Artificial neural network equations for predicting the modified proctor compaction parameters of fine-grained soil. Transp. Infrastruct. Geotechnol. 2023, 10, 424–447. [Google Scholar] [CrossRef]
- Hasnat, A.; Hasan, M.M.; Islam, M.R.; Alim, M.A. Prediction of compaction parameters of soil using support vector regression. Curr. Trends Civ. Struct. Eng. 2019, 4, 1–7. [Google Scholar] [CrossRef]
- Ferreira, C. Gene expression programming: A new adaptive algorithm for solving problems. arXiv 2001, arXiv:pcs/0102027. [Google Scholar]
- Raja, M.N.A.; Abdoun, T.; El-Sekelly, W. Smart prediction of liquefaction-induced lateral spreading. J. Rock Mech. Geotech. Eng. 2023. [Google Scholar] [CrossRef]
- Jalal, F.E.; Xu, Y.; Iqbal, M.; Jamhiri, B.; Javed, M.F. Predicting the compaction characteristics of expansive soils using two genetic programming-based algorithms. Transp. Geotech. 2021, 30, 100608. [Google Scholar] [CrossRef]
- Jalal, F.E.; Iqbal, M.; Ali Khan, M.; Salami, B.A.; Ullah, S.; Khan, H.; Nabil, M. Indirect estimation of swelling pressure of expansive soil: Gep versus mep modelling. Adv. Mater. Sci. Eng. 2023, 2023, 1827117. [Google Scholar] [CrossRef]
- Samui, P. Determination of ultimate capacity of driven piles in cohesionless soil: A multivariate adaptive regression spline approach. Int. J. Numer. Anal. Methods Geomech. 2012, 36, 1434–1439. [Google Scholar] [CrossRef]
- Samui, P. Multivariate adaptive regression spline (Mars) for prediction of elastic modulus of jointed rock mass. Geotech. Geol. Eng. 2013, 31, 249–253. [Google Scholar] [CrossRef]
- Deng, Z.-P.; Pan, M.; Niu, J.-T.; Jiang, S.-H.; Qian, W.-W. Slope reliability analysis in spatially variable soils using sliced inverse regression-based multivariate adaptive regression spline. Bull. Eng. Geol. Environ. 2021, 80, 7213–7226. [Google Scholar] [CrossRef]
- Ghanizadeh, A.R.; Rahrovan, M. Modeling of unconfined compressive strength of soil-RAP blend stabilized with Portland cement using multivariate adaptive regression spline. Front. Struct. Civ. Eng. 2019, 13, 787–799. [Google Scholar] [CrossRef]
- Zheng, G.; Zhang, W.; Zhou, H.; Yang, P. Multivariate adaptive regression splines model for prediction of the liquefaction-induced settlement of shallow foundations. Soil Dyn. Earthq. Eng. 2020, 132, 106097. [Google Scholar] [CrossRef]
- Zuo, Q. Settlement prediction of the piles socketed into rock using multivariate adaptive regression splines. J. Appl. Sci. Eng. 2022, 26, 111–119. [Google Scholar]
- Sirimontree, S.; Jearsiripongkul, T.; Lai, V.Q.; Eskandarinejad, A.; Lawongkerd, J.; Seehavong, S.; Thongchom, C.; Nuaklong, P.; Keawsawasvong, S. Prediction of penetration resistance of a spherical penetrometer in clay using multivariate adaptive regression splines model. Sustainability 2022, 14, 3222. [Google Scholar] [CrossRef]
- Emamgolizadeh, S.; Bateni, S.; Shahsavani, D.; Ashrafi, T.; Ghorbani, H. Estimation of soil cation exchange capacity using genetic expression programming (GEP) and multivariate adaptive regression splines (MARS). J. Hydrol. 2015, 529, 1590–1600. [Google Scholar] [CrossRef]
- Haghiabi, A.H. Prediction of river pipeline scour depth using multivariate adaptive regression splines. J. Pipeline Syst. Eng. Pract. 2017, 8, 04016015. [Google Scholar] [CrossRef]
- Conoscenti, C.; Ciaccio, M.; Caraballo-Arias, N.A.; Gómez-Gutiérrez, Á.; Rotigliano, E.; Agnesi, V. Assessment of susceptibility to earth-flow landslide using logistic regression and multivariate adaptive regression splines: A case of the Belice River basin (western Sicily, Italy). Geomorphology 2015, 242, 49–64. [Google Scholar] [CrossRef]
- Sharda, V.; Prasher, S.; Patel, R.; Ojasvi, P.; Prakash, C. Performance of Multivariate Adaptive Regression Splines (MARS) in predicting runoff in mid-Himalayan micro-watersheds with limited data/Performances de régressions par splines multiples et adaptives (MARS) pour la prévision d’écoulement au sein de micro-bassins versants Himalayens d’altitudes intermédiaires avec peu de données. Hydrol. Sci. J. 2008, 53, 1165–1175. [Google Scholar]
- R Core Team. R: A Language and Environment for Statistical Computing; R Core Team: Vienna, Austria, 2020. [Google Scholar]
- Friedman, J.H. Multivariate adaptive regression splines. Ann. Stat. 1991, 19, 1–67. [Google Scholar] [CrossRef]
- Loh, W.Y. Classification and regression trees. Data Min. Knowl. Discov. 2011, 1, 14–23. [Google Scholar] [CrossRef]
- Kuhn, M.; Johnson, K. Applied Predictive Modeling; Springer: Berlin/Heidelberg, Germany, 2013; Volume 26. [Google Scholar]
- Alhakeem, Z.M.; Jebur, Y.M.; Henedy, S.N.; Imran, H.; Bernardo, L.F.; Hussein, H.M. Prediction of ecofriendly concrete compressive strength using gradient boosting regression tree combined with GridSearchCV hyperparameter-optimization techniques. Materials 2022, 15, 7432. [Google Scholar] [CrossRef] [PubMed]
- Yang, Z.; Gao, W.; Chen, L.; Yuan, C.; Chen, Q.; Kong, Q. A novel electromechanical impedance-based method for non-destructive evaluation of concrete fiber content. Constr. Build. Mater. 2022, 351, 128972. [Google Scholar] [CrossRef]
- Koya, B.P.; Aneja, S.; Gupta, R.; Valeo, C. Comparative analysis of different machine learning algorithms to predict mechanical properties of concrete. Mech. Adv. Mater. Struct. 2022, 29, 4032–4043. [Google Scholar] [CrossRef]
- Tang, F.; Wu, Y.; Zhou, Y. Hybridizing grid search and support vector regression to predict the compressive strength of fly ash concrete. Adv. Civ. Eng. 2022, 2022, 3601914. [Google Scholar] [CrossRef]
- Luo, H.; Paal, S.G. Machine learning–based backbone curve model of reinforced concrete columns subjected to cyclic loading reversals. J. Comput. Civ. Eng. 2018, 32, 04018042. [Google Scholar] [CrossRef]
- Rodriguez, J.D.; Perez, A.; Lozano, J.A. Sensitivity analysis of k-fold cross validation in prediction error estimation. IEEE Trans. Pattern Anal. Mach. Intell. 2009, 32, 569–575. [Google Scholar] [CrossRef]
- Kohavi, R. A study of cross-validation and bootstrap for accuracy estimation and model selection. In Proceedings of the 14th International Joint Conference on Artificial Intelligence (IJCAI), Montreal, QC, Canada, 20 August 1995; Volume 14, pp. 1137–1145. [Google Scholar]
- Wong, T.-T. Performance evaluation of classification algorithms by k-fold and leave-one-out cross validation. Pattern Recognit. 2015, 48, 2839–2846. [Google Scholar] [CrossRef]
- Liu, X.; Liu, T.; Feng, P. Long-term performance prediction framework based on XGBoost decision tree for pultruded FRP composites exposed to water, humidity and alkaline solution. Compos. Struct. 2022, 284, 115184. [Google Scholar] [CrossRef]
- Hastie, T.; Tibshirani, R.; Friedman, J.H.; Friedman, J.H. The Elements of Statistical Learning: Data Mining, Inference, and prediction; Springer: Cham, Switzerland, 2009; Volume 2. [Google Scholar]
- Wang, H.-L.; Yin, Z.-Y. High performance prediction of soil compaction parameters using multi expression programming. Eng. Geol. 2020, 276, 105758. [Google Scholar] [CrossRef]
- Shah, H.A.; Nehdi, M.L.; Khan, M.I.; Akmal, U.; Alabduljabbar, H.; Mohamed, A.; Sheraz, M. Predicting Compressive and Splitting Tensile Strengths of Silica Fume Concrete Using M5P Model Tree Algorithm. Materials 2022, 15, 5436. [Google Scholar] [CrossRef]
- Kaveh, A.; Bakhshpoori, T.; Hamze-Ziabari, S. New model derivation for the bond behavior of NSM FRP systems in concrete. Iran. J. Sci. Technol. Trans. Civ. Eng. 2017, 41, 249–262. [Google Scholar] [CrossRef]
- Kuhn, M. Building predictive models in R using the caret package. J. Stat. Softw. 2008, 28, 1–26. [Google Scholar] [CrossRef]
- Wang, S.; Chan, D.; Lam, K.C. Experimental study of the effect of fines content on dynamic compaction grouting in completely decomposed granite of Hong Kong. Constr. Build. Mater. 2009, 23, 1249–1264. [Google Scholar] [CrossRef]
- Alshameri, B. Maximum dry density of sand–kaolin mixtures predicted by using fine content and specific gravity. SN Appl. Sci. 2020, 2, 1693. [Google Scholar] [CrossRef]





| Statistics | CG (%) | CS (%) | CF (%) | LL (%) | PL (%) | E (kJ/m3) | wopt (%) | ρdmax (Mg/m3) |
|---|---|---|---|---|---|---|---|---|
| Standard deviation | 14.566 | 23.388 | 30.016 | 164.218 | 7.405 | 735.435 | 5.964 | 0.199 |
| Mean | 7.468 | 29.448 | 63.088 | 108.727 | 22.005 | 894.066 | 17.512 | 1.751 |
| Median | 0.000 | 27.000 | 70.000 | 40.650 | 20.150 | 593.000 | 17.000 | 1.750 |
| Maximum | 67.100 | 89.000 | 100.000 | 608.000 | 48.300 | 2755.000 | 43.700 | 2.330 |
| Minimum | 0.000 | 0.000 | 8.600 | 16.000 | 6.100 | 155.000 | 5.300 | 1.090 |
| Kurtosis | 3.482 | −0.471 | −1.250 | 3.264 | 0.748 | 2.266 | 2.862 | 0.977 |
| Folds | Performance Measures | ||
|---|---|---|---|
| RMSE (Mg/m3) | R2 | MAE (Mg/m3) | |
| Fold 1 | 0.068 | 0.860 | 0.051 |
| Fold 2 | 0.067 | 0.908 | 0.050 |
| Fold 3 | 0.048 | 0.948 | 0.040 |
| Fold 4 | 0.071 | 0.870 | 0.057 |
| Fold 5 | 0.065 | 0.909 | 0.049 |
| Average | 0.064 | 0.899 | 0.050 |
| SD | 0.009 | 0.035 | 0.006 |
| CoV (%) | 0.141 | 0.039 | 0.120 |
| Training | Testing | Overall | ||
|---|---|---|---|---|
| wopt | MAE (%) | 1.12 | 1.276 | 1.15 |
| RMSE (%) | 1.392 | 1.577 | 1.428 | |
| R2 | 0.942 | 0.948 | 0.943 | |
| ρdmax | MAE (Mg/m3) | 0.04 | 0.047 | 0.041 |
| RMSE (Mg/m3) | 0.05 | 0.062 | 0.052 | |
| R2 | 0.936 | 0.919 | 0.931 |
| Compaction Parameters | Performance Measures | Overall |
|---|---|---|
| wopt | MAE (%) | 1.3 |
| RMSE (%) | 1.68 | |
| R2 | 0.921 | |
| ρdmax | MAE (Mg/m3) | 0.054 |
| RMSE (Mg/m3) | 0.073 | |
| R2 | 0.867 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abed, M.S.; Kadhim, F.J.; Almusawi, J.K.; Imran, H.; Bernardo, L.F.A.; Henedy, S.N. Utilizing Multivariate Adaptive Regression Splines (MARS) for Precise Estimation of Soil Compaction Parameters. Appl. Sci. 2023, 13, 11634. https://doi.org/10.3390/app132111634
Abed MS, Kadhim FJ, Almusawi JK, Imran H, Bernardo LFA, Henedy SN. Utilizing Multivariate Adaptive Regression Splines (MARS) for Precise Estimation of Soil Compaction Parameters. Applied Sciences. 2023; 13(21):11634. https://doi.org/10.3390/app132111634
Chicago/Turabian StyleAbed, Musaab Sabah, Firas Jawad Kadhim, Jwad K. Almusawi, Hamza Imran, Luís Filipe Almeida Bernardo, and Sadiq N. Henedy. 2023. "Utilizing Multivariate Adaptive Regression Splines (MARS) for Precise Estimation of Soil Compaction Parameters" Applied Sciences 13, no. 21: 11634. https://doi.org/10.3390/app132111634
APA StyleAbed, M. S., Kadhim, F. J., Almusawi, J. K., Imran, H., Bernardo, L. F. A., & Henedy, S. N. (2023). Utilizing Multivariate Adaptive Regression Splines (MARS) for Precise Estimation of Soil Compaction Parameters. Applied Sciences, 13(21), 11634. https://doi.org/10.3390/app132111634