
Receding Horizon Optimization for Cooperation of Connected Vehicles at Signal-Free Intersections under Mixed-Automated Traffic


Abstract
:1. Introduction
1.1. Background
1.2. Literature Review
1.3. Contribution of This Work
- (1)
- Different from the existing literature only considering coordinating vehicles under a fully AV environment, this paper proposes a coordination scheme under which AVs and MVs can cooperatively pass through a signal-free intersection;
- (2)
- The proposed scheme develops a practical application which concurrently considers the restrictions of control inputs, vehicle states, safety conditions, global conflict relationships, and the mixed-automated driving environment;
- (3)
- A distributed multi-objective optimization algorithm is presented to synchronously eliminate the traffic conflicts and improve mobility and fuel economy in a receding horizon framework.
2. Problem Statement
3. Methodology
3.1. Car-Following Models for AVs and MVs
| Algorithm 1 Trajectory-Updating Algorithm for MVs |
|
3.2. Traffic Conflict Graph and Communication Topology
3.3. Distributed Cooperative Control Model for AVs
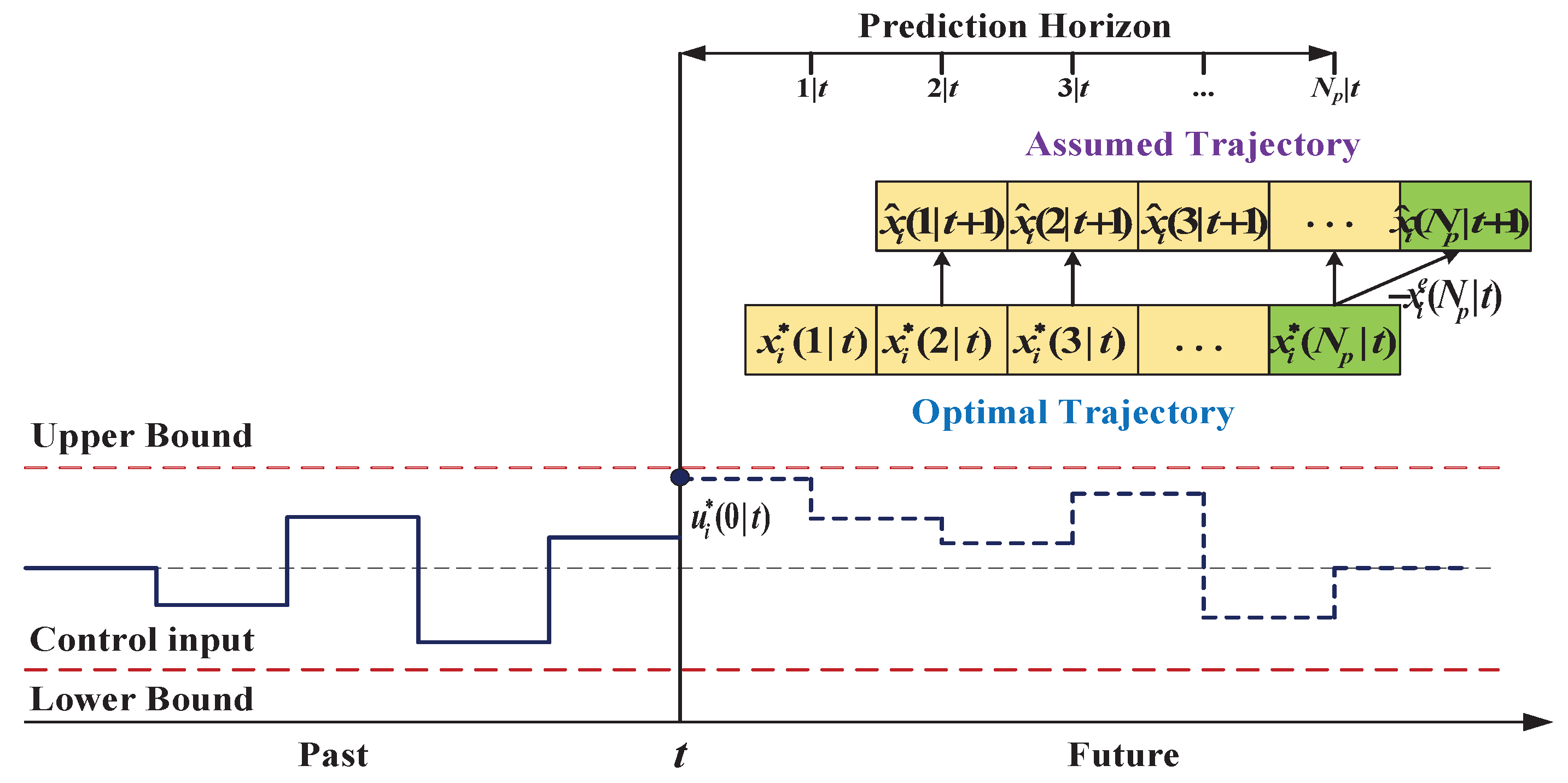
3.4. Algorithm of Distributed Receding Horizon Optimization
| Algorithm 2 Algorithm of Distributed Receding Horizon Optimization |
|
4. Simulation Results
4.1. Simulation Framework
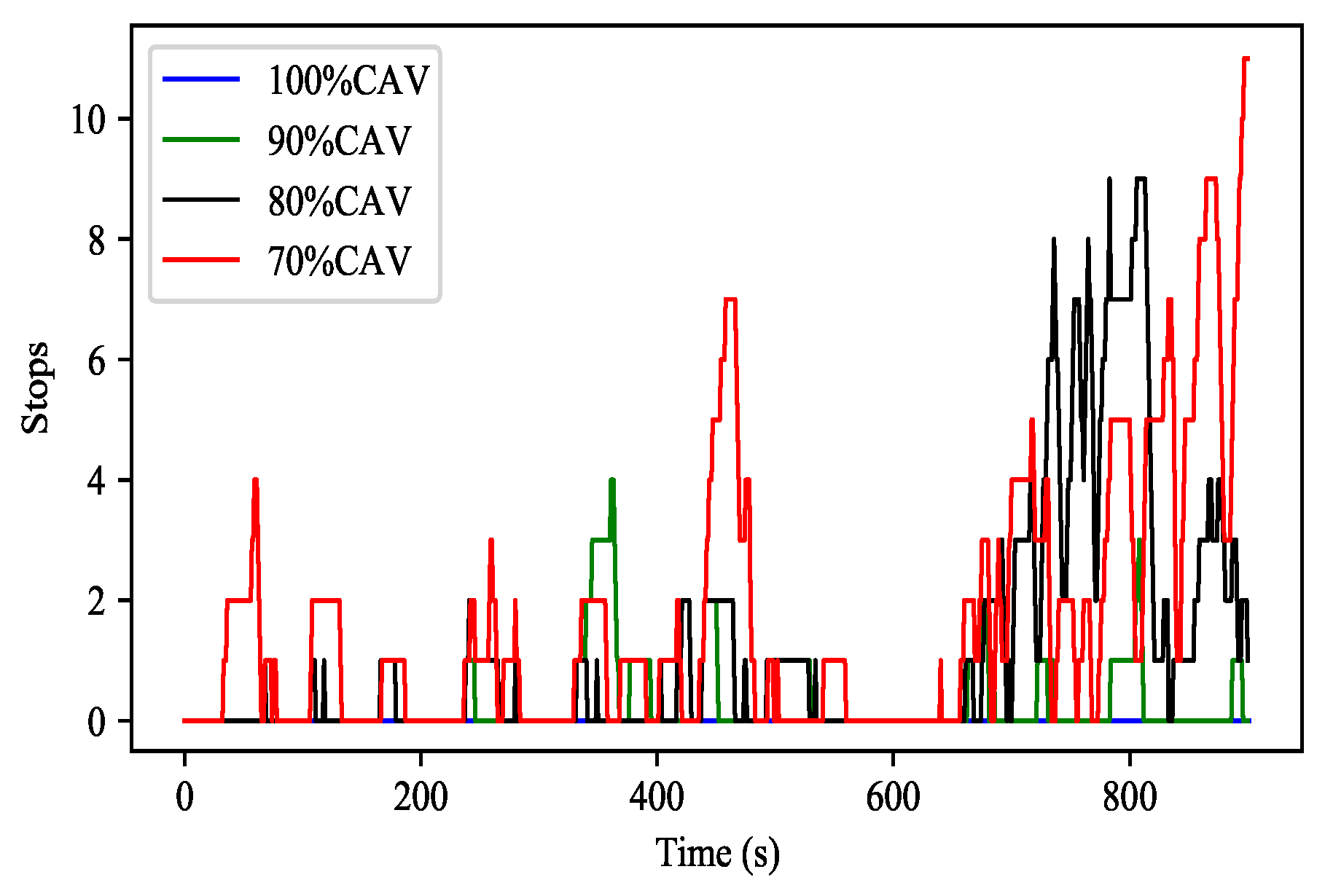
4.2. Results
4.3. Discussion and Limitations
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Alanazi, F. A systematic literature review of autonomous and connected vehicles in traffic management. Appl. Sci. 2023, 13, 1789. [Google Scholar] [CrossRef]
- Sun, K.; Zhao, X.; Gong, S.; Wu, X. A cooperative lane change control strategy for connected and automated vehicles by considering preceding vehicle switching. Appl. Sci. 2023, 13, 2193. [Google Scholar] [CrossRef]
- Antonio, G.P.; Maria-Dolores, C. Multi-agent deep reinforcement learning to manage connected autonomous vehicles at tomorrow’s intersections. IEEE Trans. Vehi. Technol. 2022, 71, 7033–7043. [Google Scholar] [CrossRef]
- Feng, Y.; Huang, S.E.; Wong, W.; Chen, Q.A.; Mao, Z.M.; Liu, H.X. On the cybersecurity of traffic signal control system with connected vehicles. IEEE Trans. Intell. Transp. Syst. 2022, 23, 16267–16279. [Google Scholar] [CrossRef]
- Riostorres, J.; Malikopoulos, A.A. A Survey on the coordination of connected and automated vehicles at intersections and merging at highway on-Ramps. IEEE Trans. Intell. Transp. Syst. 2017, 18, 1066–1077. [Google Scholar] [CrossRef]
- Dresner, K.; Stone, P. Multiagent traffic management: A reservation-based intersection control mechanism. In Proceedings of the 3rd International Joint Conference on Autonomous Agents and Multiagent Systems: (AAMAS), New York, NY, USA, 19–23 July 2004; pp. 530–537. [Google Scholar]
- Dresner, K.M.; Stone, P. A Multiagent approach to autonomous intersection management. J. Artif. Intell. Res. 2008, 31, 591–656. [Google Scholar] [CrossRef]
- Milanes, V.; Perez, J.; Onieva, E.; Gonzalez, C. Controller for urban intersections based on wireless communications and fuzzy logic. IEEE Trans. Intell. Transp. Syst. 2010, 11, 243–248. [Google Scholar] [CrossRef]
- Onieva, E.; Milanes, V.; Villagra, J.; Perez, J.; Godoy, J. Genetic optimization of a vehicle fuzzy decision system for intersections. Expert Syst. Appl. 2012, 39, 13148–13157. [Google Scholar] [CrossRef]
- Medina, A.I.M.; van de Wouw, N.; Nijmeijer, H. Cooperative intersection control based on virtual platooning. IEEE Trans. Intell. Transp. Syst. 2017, 19, 1727–1740. [Google Scholar] [CrossRef]
- Xu, B.; Li, S.E.; Bian, Y.; Li, S.; Ban, X.J.; Wang, J.; Li, K. Distributed conflict-free cooperation for multiple connected vehicles at unsignalized intersections. Transp. Res. C Emerg. Technol. 2018, 93, 322–334. [Google Scholar] [CrossRef]
- Lee, J.; Park, B. Development and evaluation of a cooperative vehicle intersection control algorithm under the connected vehicles environment. IEEE Trans. Intell. Transp. Syst. 2012, 13, 81–90. [Google Scholar] [CrossRef]
- Dai, P.; Liu, K.; Zhuge, Q.; Sha, E.H.M.; Lee, V.C.S.; Son, S.H. Quality-of-experience-oriented autonomous intersection control in vehicular networks. IEEE Trans. Intell. Transp. Syst. 2016, 17, 1956–1967. [Google Scholar] [CrossRef]
- Xu, H.; Zhang, Y.; Li, L.; Li, W. Cooperative driving at unsignalized intersections using tree search. IEEE Trans. Intell. Transp. Syst. 2019, 21, 4563–4571. [Google Scholar] [CrossRef]
- Meng, Y.; Li, L.; Wang, F.Y.; Li, K.; Li, Z. Analysis of cooperative driving strategies for non-signalized intersections. IEEE Trans. Veh. Technol. 2018, 67, 2900–2911. [Google Scholar] [CrossRef]
- Gong, J.; Cao, J.; Zhao, Y.; Wei, Y.; Guo, J.; Huang, W. Sampling-based cooperative adaptive cruise control subject to communication delays and actuator lags. Math. Comput. Simul. 2020, 171, 13–25. [Google Scholar] [CrossRef]
- Lu, J.; Wang, Y.; Shi, X.; Cao, J. Finite-time bipartite consensus for multiagent systems under detail-balanced antagonistic interactions. IEEE Trans. Syst. Man, Cyber. Syst. 2021, 51, 3867–3875. [Google Scholar] [CrossRef]
- Mirheli, A.; Tajalli, M.; Hajibabai, L.; Hajbabaie, A. A consensus-based distributed trajectory control in a signal-free intersection. Transp. Res. C Emerg. Technol. 2019, 100, 161–176. [Google Scholar] [CrossRef]
- Zhang, X.; Fang, S.; Shen, Y.; Yuan, X.; Lu, Z. Hierarchical velocity optimization for connected automated vehicles with cellular vehicle-to-everything communication at continuous signalized intersections. IEEE Trans. Intell. Transp. Syst. 2023; early access. [Google Scholar]
- Kamal, M.A.S.; Imura, J.I.; Hayakawa, T.; Ohata, A.; Aihara, K. A vehicle-intersection coordination scheme for smooth flows of traffic without using traffic lights. IEEE Trans. Intell. Transp. Syst. 2014, 16, 1136–1147. [Google Scholar] [CrossRef]
- Du, Z.; HomChaudhuri, B.; Pisu, P. Hierarchical distributed coordination strategy of connected and automated vehicles at multiple intersections. J. Intell. Transp. Syst. 2018, 22, 144–158. [Google Scholar] [CrossRef]
- Pourmehrab, M.; Elefteriadou, L.; Ranka, S.; Martin-Gasulla, M. Optimizing signalized intersections performance under conventional and automated vehicles traffic. IEEE Trans. Intell. Transp. Syst. 2019, 21, 2864–2873. [Google Scholar] [CrossRef]
- Tajalli, M.; Hajbabaie, A. Traffic signal timing and trajectory optimization in a mixed autonomy traffic stream. IEEE Trans. Intell. Transp. Syst. 2021, 23, 6525–6538. [Google Scholar] [CrossRef]
- Niroumand, R.; Tajalli, M.; Hajibabai, L.; Hajbabaie, A. Joint optimization of vehicle-group trajectory and signal timing: Introducing the white phase for mixed-autonomy traffic stream. Transp. Res. C Emerg. Technol. 2020, 116, 102659. [Google Scholar] [CrossRef]
- Xu, H.; Cassandras, C.G.; Li, L.; Zhang, Y. Comparison of cooperative driving strategies for CAVs at signal-free intersections. IEEE Trans. Intell. Transp. Syst. 2021, 23, 7614–7627. [Google Scholar] [CrossRef]
- Belkhouche, F. Collaboration and optimal conflict resolution at an unsignalized intersection. IEEE Trans. Intell. Transp. Syst. 2018, 20, 2301–2312. [Google Scholar] [CrossRef]
- Bian, Y.; Li, S.E.; Ren, W.; Wang, J.; Li, K.; Liu, H.X. Cooperation of multiple connected vehicles at unsignalized intersections: Distributed observation, optimization, and control. IEEE Trans. Ind. Electron. 2019, 67, 10744–10754. [Google Scholar] [CrossRef]
- Li, L.; Wang, F. Cooperative driving at blind crossings using intervehicle communication. IEEE Trans. Veh. Technol. 2006, 55, 1712–1724. [Google Scholar] [CrossRef]
- Krauß, S. Microscopic Modeling of Traffic Flow: Investigation of Collision Free Vehicle Dynamics. Ph.D. Thesis, University of Cologne, Koln, Germany, 1998. [Google Scholar]
- Gong, S.; Du, L. Cooperative platoon control for a mixed traffic flow including human drive vehicles and connected and autonomous vehicles. Transp. Res. B Methodol. 2018, 116, 25–61. [Google Scholar] [CrossRef]
- Rudin, W. Principles of Mathematical Analysis; McGraw-Hill: New York, NY, USA, 1976; Volume 3. [Google Scholar]
- Ishii, H.; Wang, Y.; Feng, S. An overview on multi-agent consensus under adversarial attacks. Annu. Rev. Control 2022, 53, 252–272. [Google Scholar] [CrossRef]
- Zheng, Y.; Li, S.E.; Li, K.; Borrelli, F.; Hedrick, J.K. Distributed model predictive control for heterogeneous vehicle platoons under unidirectional topologies. IEEE Trans. Control Syst. Technol. 2017, 25, 899–910. [Google Scholar] [CrossRef]
- Dunbar, W.B.; Caveney, D.S. Distributed receding horizon control of vehicle platoons: Stability and string stability. IEEE Trans. Autom. Control 2011, 57, 620–633. [Google Scholar] [CrossRef]
- Dunbar, W.B.; Murray, R.M. Distributed receding horizon control for multi-vehicle formation stabilization. Automatica 2006, 42, 549–558. [Google Scholar] [CrossRef]
- Lopez, P.A.; Behrisch, M.; Bieker-Walz, L.; Erdmann, J.; Flötteröd, Y.P.; Hilbrich, R.; Lücken, L.; Rummel, J.; Wagner, P.; Wießner, E. Microscopic traffic simulation using sumo. In Proceedings of the 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 2575–2582. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Notation | Value |
|---|---|---|
| Common | ||
| Radius of CZ (m) | R | 100 |
| Lane length (m) | L | 193.6 |
| Lane width (m) | W | 3.2 |
| Road speed limit (m/s) | 20 | |
| Vehicle length (m) | l | 5 |
| Minimum gap (m) | 5 | |
| AVs | ||
| Desired spacing (m) | 10 | |
| Maximum speed (m/s) | 18 | |
| Minimum speed (m/s) | 5 | |
| Maximum acceleration (m/s) | 3 | |
| Maximum deceleration (m/s) | 3 | |
| Prediction horizon (s) | 5 | |
| Time interval (s) | 1 | |
| Weight | 2 | |
| Weight | 1 | |
| Weight | 1 | |
| Weight | 1 | |
| MVs | ||
| Maximum speed (m/s) | 18 | |
| Maximum acceleration (m/s) | 3 | |
| Maximum deceleration (m/s) | 4 | |
| Reaction time of drivers (s) | 0.5 | |
| Constant | 0.4 |
| North- and Southbound | East- and Westbound | |||
|---|---|---|---|---|
| Case |
Through
Demand (veh/h/lane) |
Left-Turn
Demand (veh/h/lane) |
Through
Demand (veh/h/lane) |
Left-Turn
Demand (veh/h/lane) |
| 1 | 250 | 125 | 150 | 75 |
| 2 | 300 | 150 | 200 | 100 |
| 3 | 350 | 175 | 250 | 125 |
| Case | Penetration Rate of AVs | |||
|---|---|---|---|---|
| 100% | 90% | 80% | 70% | |
| 1 | 30.4 | 30.8 | 31.1 | 31.7 |
| 2 | 30.6 | 31.5 | 32.1 | 32.7 |
| 3 | 30.8 | 32.3 | 34.6 | 39.7 |
| Case | Penetration Rate of AVs | |||
|---|---|---|---|---|
| 100% | 90% | 80% | 70% | |
| 1 | 31.8 | 31.6 | 31.4 | 31.5 |
| 2 | 33.4 | 33.3 | 33.5 | 33.7 |
| 3 | 34.7 | 35.3 | 36.4 | 38.8 |
| Performance | Proposed Scheme | NC | FSC | |
|---|---|---|---|---|
| 100% AV | 70% AV | |||
| Travel time (s) | 30.8 | 39.7 | 56.5 | 60.6 |
| Fuel consumption (mL) | 34.7 | 38.8 | 53.6 | 49.5 |
| PRA | Demand 1 | Demand 2 | ||
|---|---|---|---|---|
| This Study | Ramin et al. [24] | This Study | Ramin et al. [24] | |
| 100% | 69.1 | 78.2 | 157.8 | 173.2 |
| 70% | 164.2 | 191.6 | 1062.3 | 1057.0 |
| 50% | 211.7 | 204.3 | 1552.1 | 1363.2 |
| 30% | 265.6 | 228.3 | 2521.6 | 2000.1 |
| 0% | 318.4 | 270.9 | 3256.2 | 2468.8 |
| PRA | # Var. | # Con. | # Com. | |||
|---|---|---|---|---|---|---|
| This Study | Ramin et al. [24] | This Study | Ramin et al. [24] | This Study | Ramin et al. [24] | |
| 100% | 25.5 | 150.9 | 20.4 | 92.8 | 26.5 | 38.8 |
| 70% | 20.3 | 130.3 | 16.2 | 88.5 | 21.6 | 33.0 |
| 50% | 15.5 | 72.7 | 12.4 | 84.4 | 18.4 | 29.1 |
| 30% | 10.4 | 51.3 | 5.2 | 82.0 | 15.1 | 25.3 |
| 0% | 0 | 15.9 | 0 | 75.0 | 10.2 | 19.4 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gong, J.; Chen, W.; Zhou, Z. Receding Horizon Optimization for Cooperation of Connected Vehicles at Signal-Free Intersections under Mixed-Automated Traffic. Appl. Sci. 2023, 13, 11576. https://doi.org/10.3390/app132011576
Gong J, Chen W, Zhou Z. Receding Horizon Optimization for Cooperation of Connected Vehicles at Signal-Free Intersections under Mixed-Automated Traffic. Applied Sciences. 2023; 13(20):11576. https://doi.org/10.3390/app132011576
Chicago/Turabian StyleGong, Jian, Weijie Chen, and Ziyi Zhou. 2023. "Receding Horizon Optimization for Cooperation of Connected Vehicles at Signal-Free Intersections under Mixed-Automated Traffic" Applied Sciences 13, no. 20: 11576. https://doi.org/10.3390/app132011576
APA StyleGong, J., Chen, W., & Zhou, Z. (2023). Receding Horizon Optimization for Cooperation of Connected Vehicles at Signal-Free Intersections under Mixed-Automated Traffic. Applied Sciences, 13(20), 11576. https://doi.org/10.3390/app132011576