1. Introduction
Bouskoura is a Moroccan city located approximately twenty kilometers south of the economic capital, Casablanca. Recently, the city has experienced a significant increase in population, resulting in a rise in road traffic as many individuals commute to and from Casablanca for work. This has led to direct congestion, particularly at intersections, resulting in increased travel time, vehicle blockages, and heightened fuel consumption. Congestion can cause driver stress and frustration [
1], which can significantly impact individuals’ performance and efficiency, lowering economic productivity and reducing the quality of life. Therefore, it is crucial to develop a traffic-management strategy that improves the design of existing roads [
2].
Deep learning is a rapidly growing subfield of artificial intelligence that has shown a remarkable ability to learn from vast amounts of data and can solve complex problems with high accuracy [
3,
4]. However, this often requires access to powerful computing resources and significant data storage, making it challenging to deploy deep-learning algorithms in resource-limited environments [
5,
6].
To address this challenge, our study proposes a solution that leverages deep-learning techniques to analyze the traffic data collected by our smart camera and to make informed decisions on which road lanes to expand or extend. By designing our solution with consideration for resource constraints, we can demonstrate the feasibility of deploying deep learning in real-world applications with limited resources. Deep learning has already shown great potential for improving traffic management and our solution provides a promising avenue for addressing traffic congestion challenges in urban environments.
In this paper, we present an efficient system that leverages modern image processing and artificial-intelligence technologies to support decision-making regarding which road lanes to extend or expand. Our system uses a smart camera equipped with an Nvidia Jetson Nano card to gather statistics. The camera records the number of vehicles by category at each intersection lane daily and calculates the precise count of vehicles moving from a certain entrance to a certain exit. All processing is carried out on the card, and the resulting statistics are then transmitted via the standard IoT messaging protocol MQTT [
7] for further analysis and decision support.
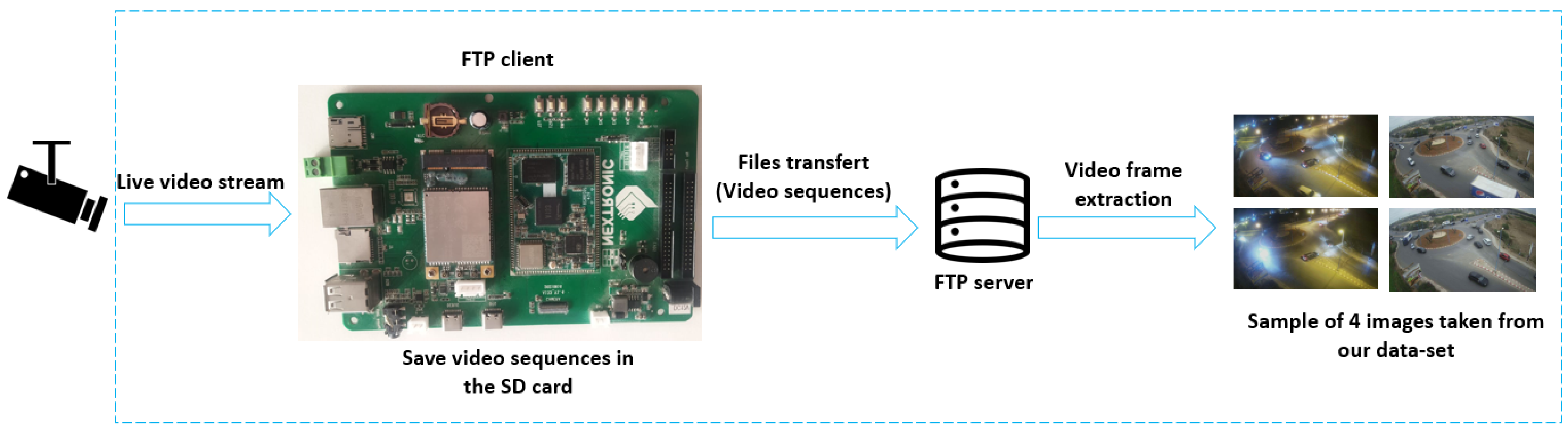
Our initial task was to create an application that could enable us to gather a substantial dataset to construct our detection and classification model. For data collection, we utilized an Allwinner A133 embedded card with a Linux system. The card was programmed to capture video sequences from an IP camera installed at the same intersection. The data were then stored in an external memory card and transmitted to a server via FTP with a secondary program.
We used these videos to create a dataset of 13,000 images. For object detection, we employed YOLOv7 (you only look once, version 7), which is currently the most reliable and easily deployable model available [
8]; it was selected based on these qualities, as well as its compatibility with the Nvidia Jetson Nano card. The images were manually labeled into four classes: cars, trucks, motorcycles, and buses. Manual labeling was essential to ensure the accuracy and precision of the labeled data, resulting in a higher-quality classification model. By manually labeling the images, we were able to carefully inspect and classify each object in the images, reducing the likelihood of errors or misclassifications. Our model of vehicle detection and classification was trained using 7000 images for training, 4000 for validation, and 2000 for testing. We evaluated the performance of our trained model using several measures, including a mean average precision (mAP) at a threshold of 0.5 of 91%, a recall of 84.1%, and a precision of 87.2%. After detection and recognition, we utilized the Deep SORT algorithm for vehicle tracking. Finally, the counting of vehicles on each road at the intersection was conducted by using a mathematical formula that calculated the intersection of two segments to trigger a vehicle count in increments. Finally, we calculated the number of vehicles passing from one road to another; this calculation was based on tracking that allows us to identify each vehicle and follow it throughout the scene with the information found previously, which is the number of vehicles passing through each road.
Our main contribution is the development of a robust and efficient vehicle-counting solution that can be deployed on the Nvidia Jetson Nano card. We achieved this by leveraging a large dataset, which was collected with an attention to different scenarios and conditions. This allowed us to train a high-performing detection model that can detect vehicles with high accuracy and low latency. In addition to detection, we utilized a tracking algorithm, Deep SORT, which maintains the identity of each vehicle as it moves throughout the roundabout, improving the counting accuracy of the system. Our solution offers several advantages over traditional methods, including speed, accuracy, and scalability. Deploying the solution on the Nvidia Jetson Nano card ensures low latency and high performance, making it ideal for real-time applications. In our experimental results, we demonstrated that our solution outperforms existing methods, achieving high accuracy and low error rates. We believe that our contribution can pave the way for more efficient and accurate vehicle-counting systems, which can have significant applications in areas such as traffic management, security, and surveillance.
The remainder of this paper is structured as follows:
Section 2 presents the previous works that deal with similar projects, i.e., “counting vehicles in embedded systems”.
Section 3 provides a brief overview of our project, including the cost of the solution and a detailed description of the overall architecture. Each component of the architecture is discussed in a separate subsection.
Section 4 explains the experimental results.
Section 5 includes a discussion and, finally, a conclusion.
2. Related Work
The main objective of our paper is to develop an intelligent camera system capable of processing a camera feed in real time to calculate the number of vehicles in each category passing through an intersection, as well as the total number of vehicles passing through each path. In the literature, we found various pieces of research and projects related to this problem and we would like to cite some examples.
Abuelgasim et al. [
9] presented a vehicle-counting system that utilized the YOLOv5 algorithm for object detection and Deep SORT for tracking. They collected a database of vehicles with four classes and deployed their system on an Nvidia Jetson Nano card, which can process at a speed of 15 fps. However, their system was only tested on videos; to truly evaluate the performance of a solution, it should be tested in real-time conditions under various lighting and weather conditions. Therefore, to ensure optimal performance, it is necessary to train a robust model that can handle different lighting and weather conditions.
Duc-Liem et al., 2021 [
10] presented a low-cost and effective system that integrated object detection models to detect, track, and count vehicles. They created a vehicle detection dataset representing traffic conditions in Vietnam and evaluated several deep learning models on two different types, a Coral Dev Board that supported TPU and then an Nvidia Jetson Nano Board that supported GPU. However, their study acknowledged the need to improve the inference time of the model for optimal performance. To address this limitation, our work aims to optimize the inference time, thus making a system that is even more practical for traffic control and management.
Valladares et al., 2021 [
11] assessed the performance of Nvidia cards by using machine learning to count vehicles in real time in the city of Quito, Ecuador. They evaluated performance based on several factors, including resource utilization (GPU and CPU), power consumption, the temperature of the card, and the RAM usage during processing. Additionally, they confirmed the need to increase the precision of their model, as the use of OpenDataCam for vehicle-counting and identification proved effective, but certain factors such as camera position, lighting, vehicle size and speed, and traffic flow needed to be considered. Therefore, it is necessary to find a solution that can adapt to all these conditions.
Yan Han et al., 2017 [
12] developed a driving-assistance system utilizing embedded cards, such as the Nvidia Jetson. The system consists of two components: the first one utilizes image processing techniques to locate signs, while the second uses a convolutional neural network (CNN) to classify the detected signs. The proposed system was implemented on the Nvidia Jetson TX1 board with a web camera. Although the system achieved a high detection accuracy of 96%, the frame rate was low, at 1.6 frames per second (FPS). Therefore, a faster model is needed to be deployed on the Jetson card.
Zhihui Wang et al., 2020 [
13], proposed an integrated solution that combines detection, tracking, and trajectory modeling algorithms for vehicle detection and counting. They utilized a GMM-type backward modeling approach along with a machine-learning-based detector to enhance the accuracy of vehicle detection and counting precision. They also implemented a trajectory modeling scheme that considers the direction and trajectory of the vehicles. However, their algorithm still has limitations, such as typical detection failures, false positives due to dynamic backgrounds or reflections, and missing detections of vehicles that are too large or too small. Therefore, there is a need to consider more robust algorithms to overcome these issues.
We have taken into consideration the limitations and difficulties highlighted by previous studies in the field of vehicle detection and counting. To improve the performance of this research, we have proposed the use of alternative algorithms for object detection and a new method of vehicle-counting that is adaptable to the specific requirements of the system. Additionally, we have collected a new database of vehicles that considers all the possible detection difficulties, such as occlusion, illumination variations, or bad weather conditions, to ensure a more robust and reliable detection and counting system.
3. System Architecture and Test Environment
The proposed traffic-management system aims to analyze the traffic at an intersection located between Bouskoura and Casablanca. For this purpose, we installed an IP camera connected to an Nvidia Nano Jetson card, which serves as our processing unit.
Figure 1 shows some of the images captured during the installation. Our system functions as a smart camera capable of detecting and tracking vehicles in real time. One of the most important features of our camera is that it follows the concept of edge computing, which means that the analysis is performed directly on the device, and only the counting results are transmitted. This has two main advantages: first, we do not need to transmit the images, which reduces bandwidth requirements; second, we respect the privacy of citizens, which is a crucial consideration for any application deployed in a public place.
To provide a practical and informative solution, we have included the current cost of each piece of equipment used in our system.
Table 1 summarizes the estimated cost of each component:
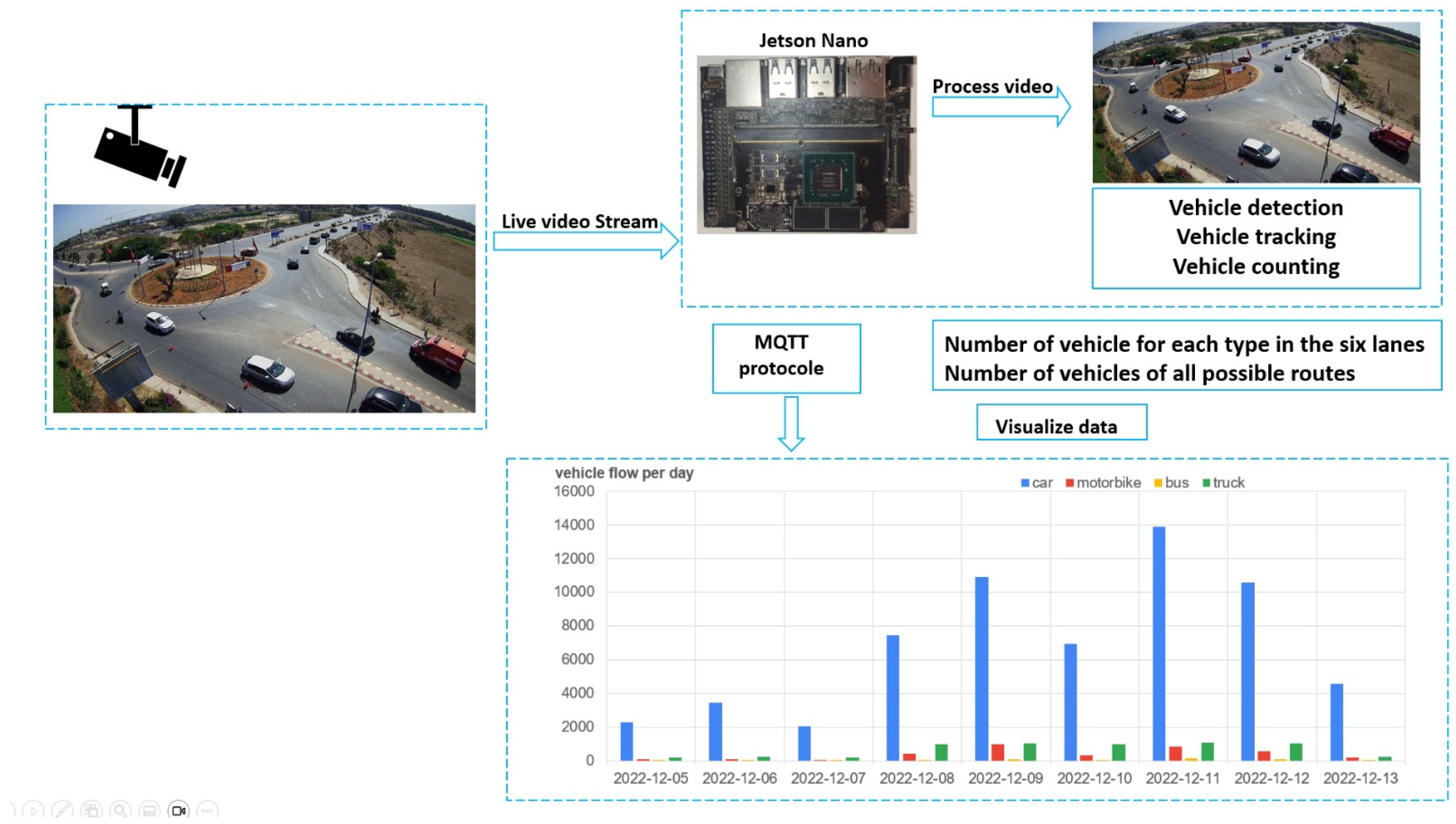
The system architecture of the proposed traffic management system is composed of several components, including data acquisition, object detection and classification, object tracking and identification, counting, and data transmission. The data-acquisition component captures video footage of the traffic at each intersection using a smart camera and statistics are calculated and transmitted via the MQTT protocol. The object detection and classification component uses the YOLOv7-tiny algorithm for vehicle identification and classification. The object tracking and identification component uses the Deep SORT algorithm to track and identify vehicles. The counting component combines image processing techniques and deep-learning algorithms to count the number of vehicles passing through each lane. Finally, the data-transmission component is responsible for transmitting the processed traffic data to a centralized server for further analysis and decision-making via the MQTT protocol.
Figure 2 shows the architectural overview of the proposed system, including its components.
3.1. Collection and Description of Data
Before deciding to build a custom detection model, we tested several existing models based on other datasets, such as COCO. However, these models did not meet the desired level of accuracy due to the constraint of having only one camera covering all the lanes of the intersection. The camera captures large vehicles that are close but the problem arises with vehicles in other lanes that are further away and appear smaller in size. To address this issue, we decided to build a dataset that met our needs by using the same camera deployed in the intersection. This approach ensured that the detection and tracking were optimized for the specific camera and consequently improved the accuracy of the counting, which is the primary purpose of our application.
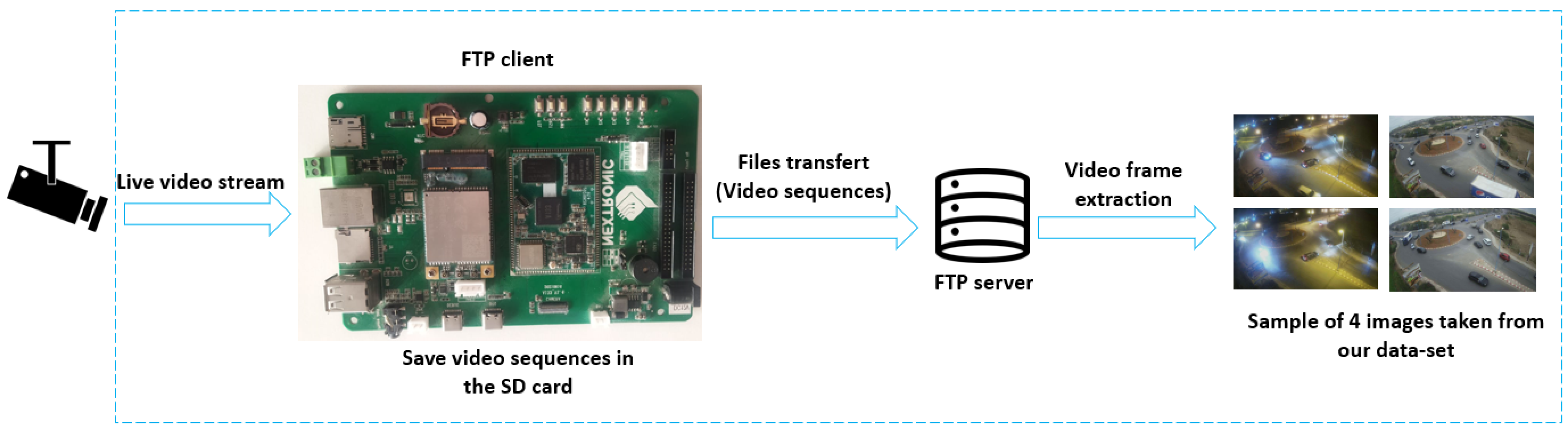
To build our dataset, we used an embedded system with a Linux system based on the Allwinner A133 motherboard. We programmed the board to capture video footage throughout the day from the IP camera installed at the intersection. The videos were stored on a memory card and sent to the server via FTP with a Python program that removed the successfully transmitted videos.
We carefully filtered the collected video sequences to obtain images that contained diversified sets representing different classes (cars, trucks, buses, and motorcycles) at different times of the day and in varying weather conditions, ensuring that all possible variations of the real world were included.
The dataset contains 13,000 images, which were manually annotated using the labeling tool with the text extension of YOLO.
Figure 3 shows the system architecture used for the dataset collection.
3.2. Object Detection, YOLOv7
To select the best algorithm for our vehicle detection and classification task, we needed to consider several criteria, including real-time detection with high reliability and deployment ability on the Nvidia Jetson Nano card. After careful consideration, we chose the YOLOv7 as the most suitable detection algorithm for our application as it has been successfully tested in several real-world applications [
8,
14,
15]. YOLOv7 is characterized by a unique CNN architecture that processes multiple networks separately [
8].
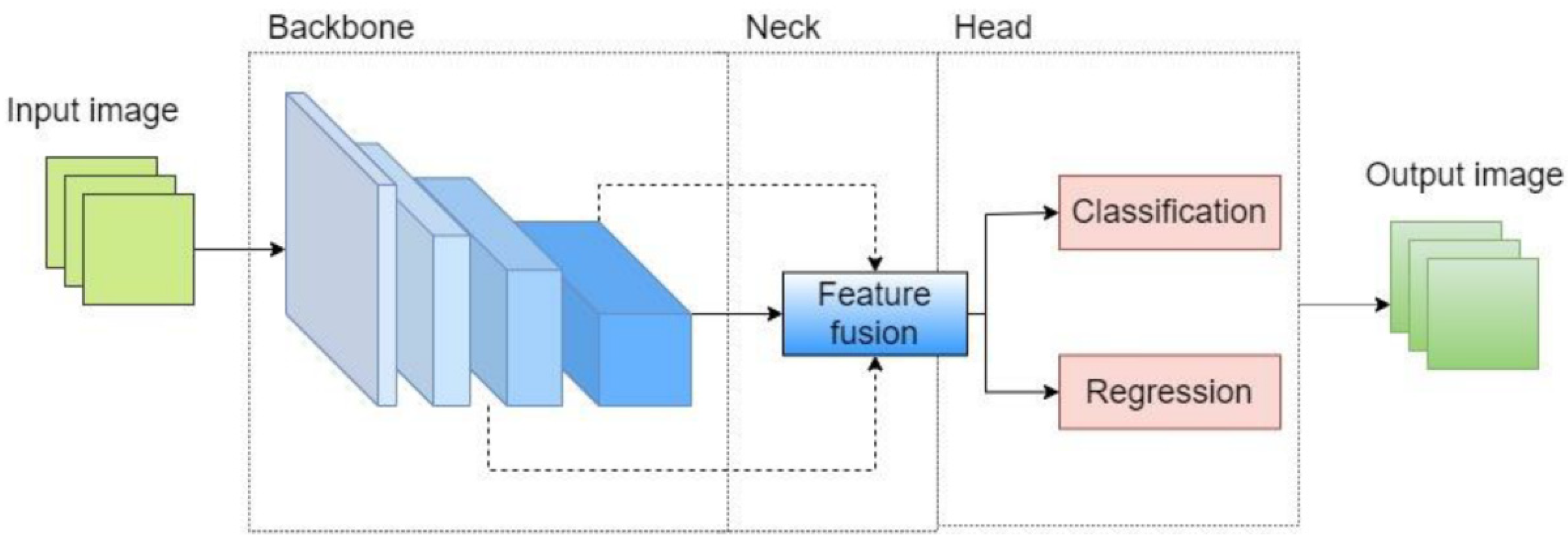
In a YOLO model (the general structure [
8] of which is represented in
Figure 4), the back part is the part that groups the pixels of the image. The representations of the layers of the convolutional network are combined and blended in the neck; then, they are passed to the prediction head. The head is the final part of the CNN, in which our YOLO model predicts the object classes and locations.
We carried out a comparative analysis of YOLOv7 with other YOLO versions, including YOLOv4 and YOLOv5. Our study revealed that YOLOv7 outperforms both YOLOv4 and YOLOv5 in terms of accuracy, parameters, and computation. Specifically, YOLOv7 showed a 1.5% higher average precision (AP) than YOLOv4-tiny, while reducing the number of parameters by 75% and computation by 36%. Moreover, the more edge-optimized version of YOLOv7, YOLOv7-tiny, achieved the same AP as YOLOv4-tiny, while using 39% fewer parameters and requiring 49% less computation. When compared to YOLOv5-N, YOLOv7-tiny demonstrated a 10.7% higher accuracy on AP and was 127 FPS faster [
16].
Our custom model for vehicle detection and classification was trained using the transfer learning approach, and it was based on the pretrained weight file of YOLOv7-tiny [
17] and our annotated dataset. We ran YOLOv7-tiny on the Nvidia Jetson Nano as this model can work faster on this type of device. Overall, our comparative study and choice of YOLOv7 demonstrate that it is a highly effective and efficient algorithm for real-time vehicle detection and classification.
3.3. Vehicle Tracking
In object tracking applications, there is the problem of correctly identifying the same object over multiple frames of a video. Deep SORT addresses this issue by assigning a unique identification (ID) to each detected object and by using a combination of appearance and motion information to track the object over time. To achieve the objective of our project, which is the counting of vehicles, we need to track all the vehicles accurately, which is a crucial task in this type of application. The tracking of objects involves detecting the object, identifying it in a frame, and tracking it across all sequences until it leaves the scene. To achieve this task, we chose to use the Deep SORT algorithm (simple online and real-time tracking with a deep association metric), which is a multiobject tracking method. The Deep SORT algorithm uses the spatial and temporal characteristics of the targets to track and maintain the identification of all moving objects in all sequences [
18] (as shown in
Figure 5). By assigning each detected object a unique ID, Deep SORT ensures that the same vehicle is consistently identified and tracked across multiple frames, allowing for accurate vehicle-counting.
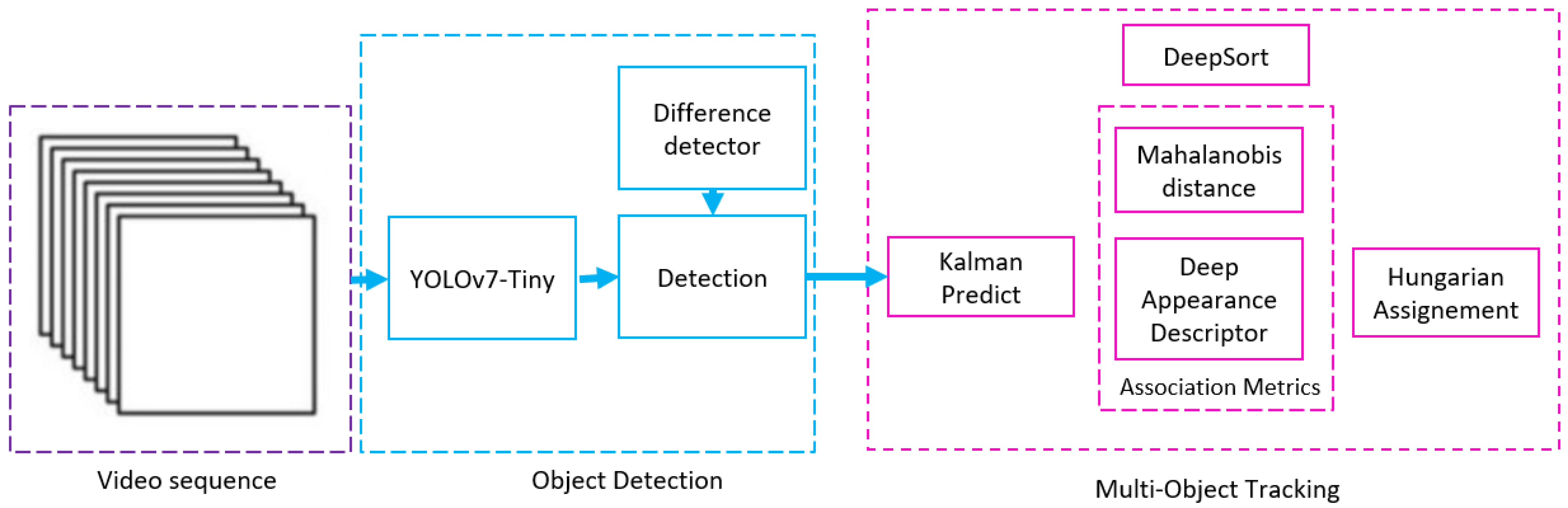
The Deep SORT algorithm consists of the following steps (as is shown in
Figure 6): First, the vehicles are detected using the YOLOv7-tiny. Then comes the multiobject tracking step, where the Kalman filter predicts the trajectories based on the position and speed of the target object; meanwhile, the Hungarian algorithm measures the correlation [
19].
Deep SORT distinguishes itself by using a combination of two convolutional layers, followed by six residual blocks and an appearance descriptor [
19]. This makes the system more robust against missing-object occlusions by significantly reducing the number of identity changes. This combination makes Deep SORT an appropriate choice for applications requiring real-time monitoring. Furthermore, Deep SORT has been shown to be effective in handling complex scenarios with significant occlusion, which is a common challenge in tracking vehicles that are using a roundabout. The algorithm is also capable of tracking vehicles with varying speeds and trajectories, making it ideal for real-world applications.
Additionally, the ability of Deep SORT to maintain the identity of each vehicle as it moves throughout the roundabout helps to improve the accuracy of the vehicle-counting system. Overall, the combination of traditional tracking methods with deep-learning techniques, the ability to handle complex scenarios, and the ability to maintain the identity of each vehicle makes Deep SORT a suitable choice for vehicle tracking for vehicles using a roundabout, and it contributes to the high accuracy of the proposed vehicle-counting solution.
3.4. The Counting of Vehicles at Intersections
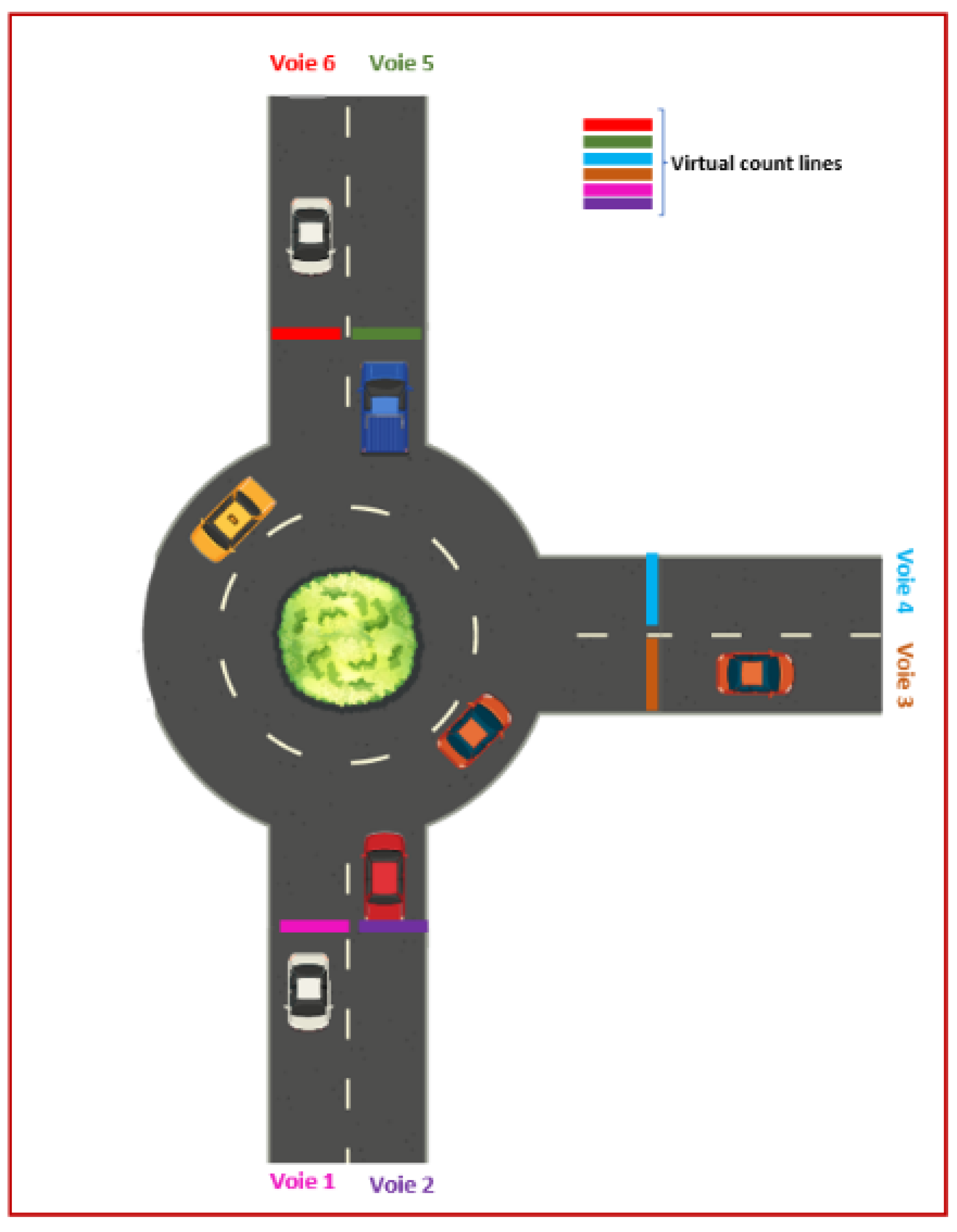
The principle used for the counting of vehicles in the different lanes [
20] of the intersection involves drawing virtual custom lines that cut across the six lanes of the roundabout.
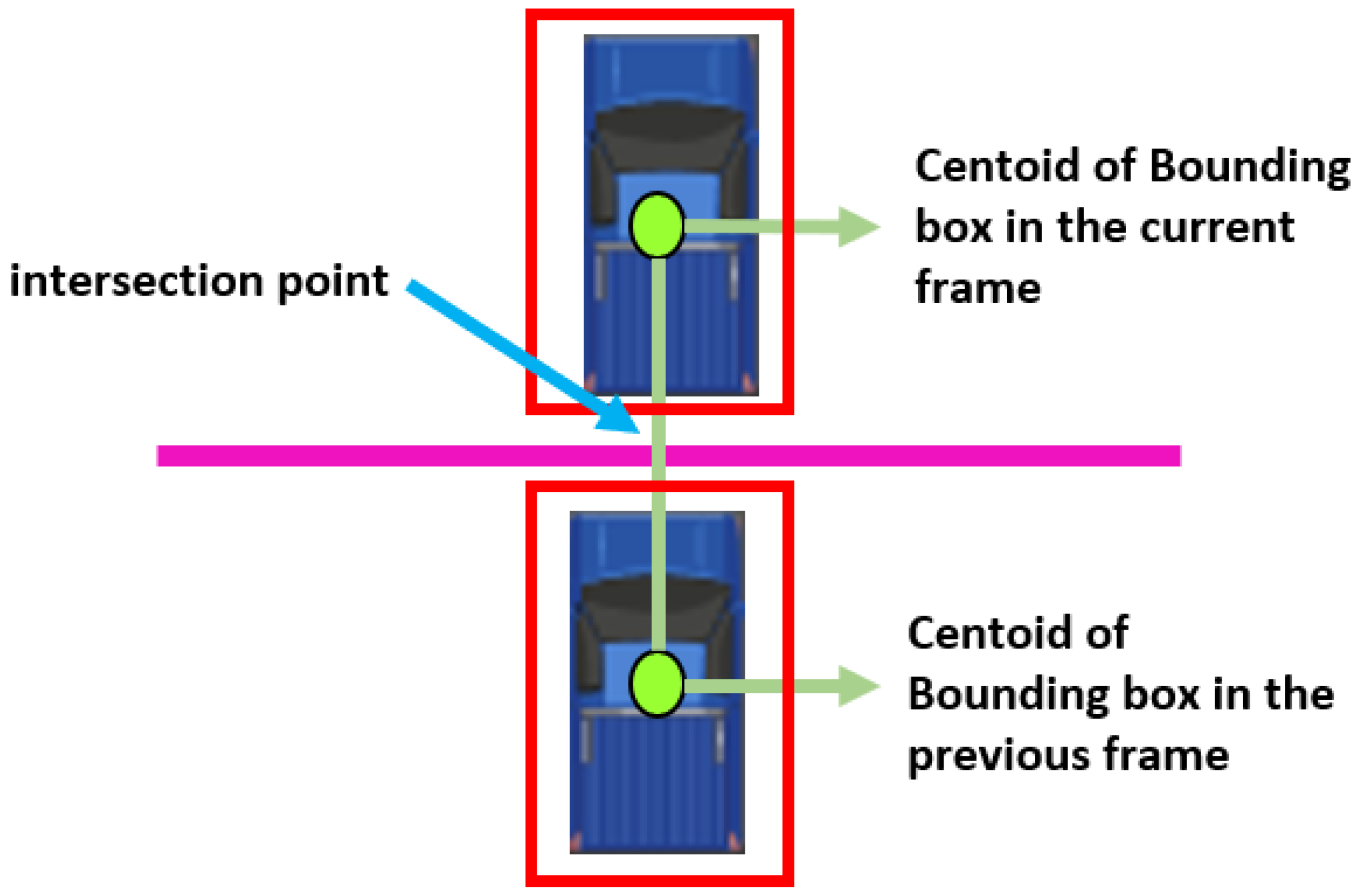
Figure 7 shows an illustrative diagram of the method used. Each line drawn must reach both sides of each lane in a single direction. For the detecting and tracking of vehicles in different images, the system calculates the intersection between the defined line and the segment composed of two points: the centroid of the current box of the vehicle and the centroid of the old box of the same detected vehicle (
Figure 8). When the segment crosses the imaginary line, the system calculates the number of vehicles in increments and detects the vehicles in the relevant category.
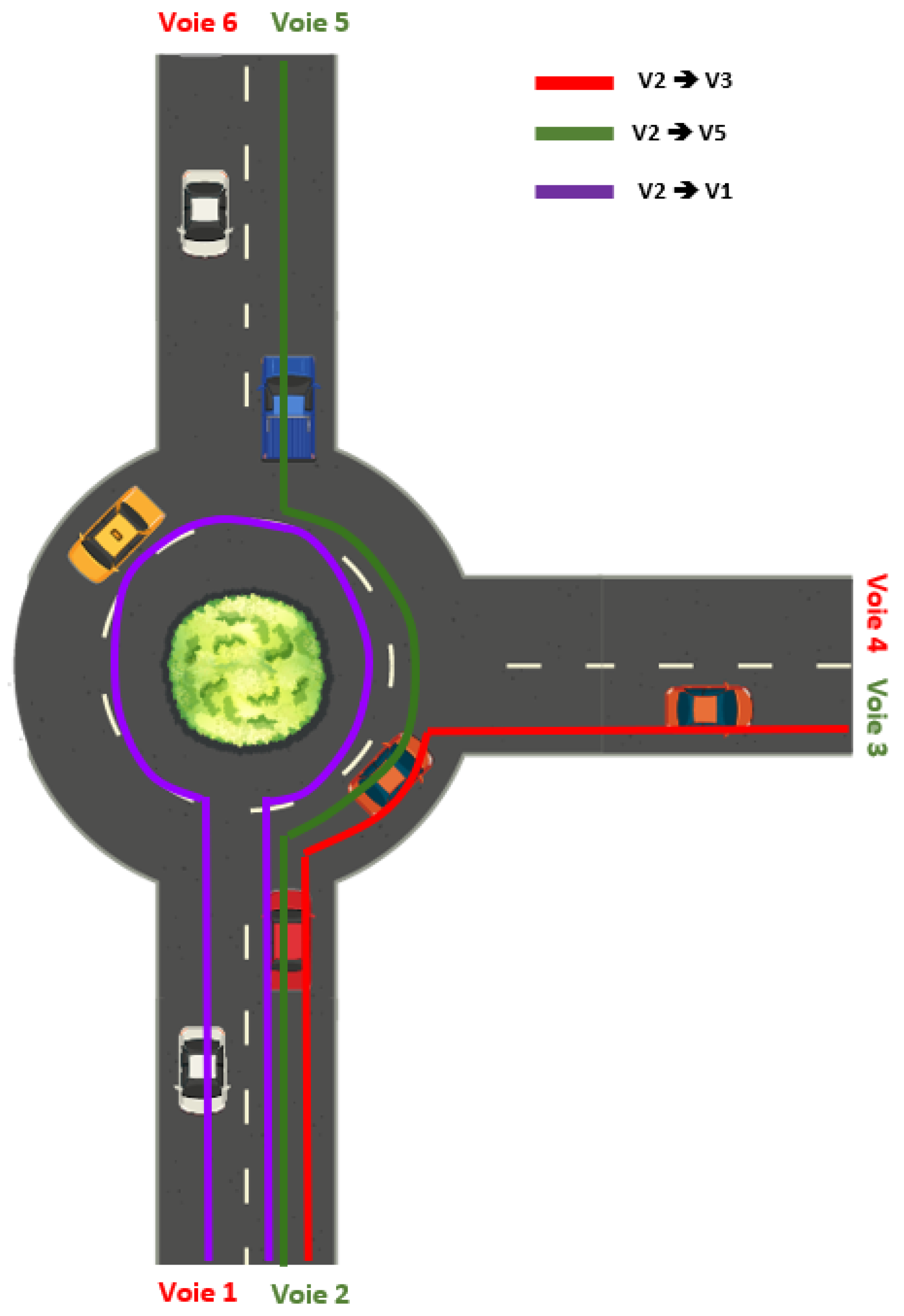
To calculate the number of vehicles passing from one lane to another, we recorded the IDs of the vehicles that crossed each lane. If a certain vehicle with the same ID crossed two lanes simultaneously, we calculated the number of vehicles, in increments, that were making this maneuver. For example, if the vehicle identified by the number 1 passes through lane 3 at first, and then passes through lane 4, we calculated the number, in increments, of vehicles that passed from lane 3 to lane 4.
In
Figure 9, we give an example of the possible trajectories for a vehicle coming from lane 2. As illustrated in the figure, we can conclude that a vehicle coming from lane 2 can pass through lane 5, lane 3, or lane 1, thus making the following routes V2 → V5, V2 → V3, and V2 → V1. Additionally, the same principle applies to all the other lanes of the intersection.
3.5. Deploy Model for the Nvidia Jetson Nano
The Nvidia Jetson Nano is a small, low-power computer designed for use in embedded systems and other applications requiring a high computing performance within a compact form factor. It is based on the Nvidia Jetson platform and is powered by a quad-core ARM Cortex-A57 CPU and a 128-core Maxwell GPU. It supports a wide range of interfaces and peripherals, including USB, ethernet, and HDMI [
21]. The Nvidia Jetson Nano has a maximum power consumption of 10 watts, which makes it an energy-efficient solution for edge computing. It also has a memory bandwidth of 25.6 GB/s, which allows for fast and efficient data transfer between the CPU and GPU. These parameters make the Nvidia Jetson Nano a suitable platform for running deep learning models as it can handle complex computations while maintaining a low power consumption. Additionally, the Nvidia Jetson Nano is equipped with 4 GB of LPDDR4 memory, which provides sufficient memory for running deep learning models and handling large datasets. Overall, the Nvidia Jetson Nano’s power consumption and memory bandwidth parameters make it an excellent choice for deploying AI solutions at the cutting edge.
4. Results
In this part, we present the performance evaluation of the deployed system, the performance of the vehicle-detection model trained by YOLOv7-tiny, the efficiency of the counting method used, and present the counting accuracy scores.
4.1. Training Results
Our model of vehicle detection and classification was trained using 7000 images for training, 4000 for validation, and 2000 for testing. We evaluated the performance of our trained model using several measures, a mAP@.5 of 91%, a recall of 84.1%, and a precision of 87.2%.
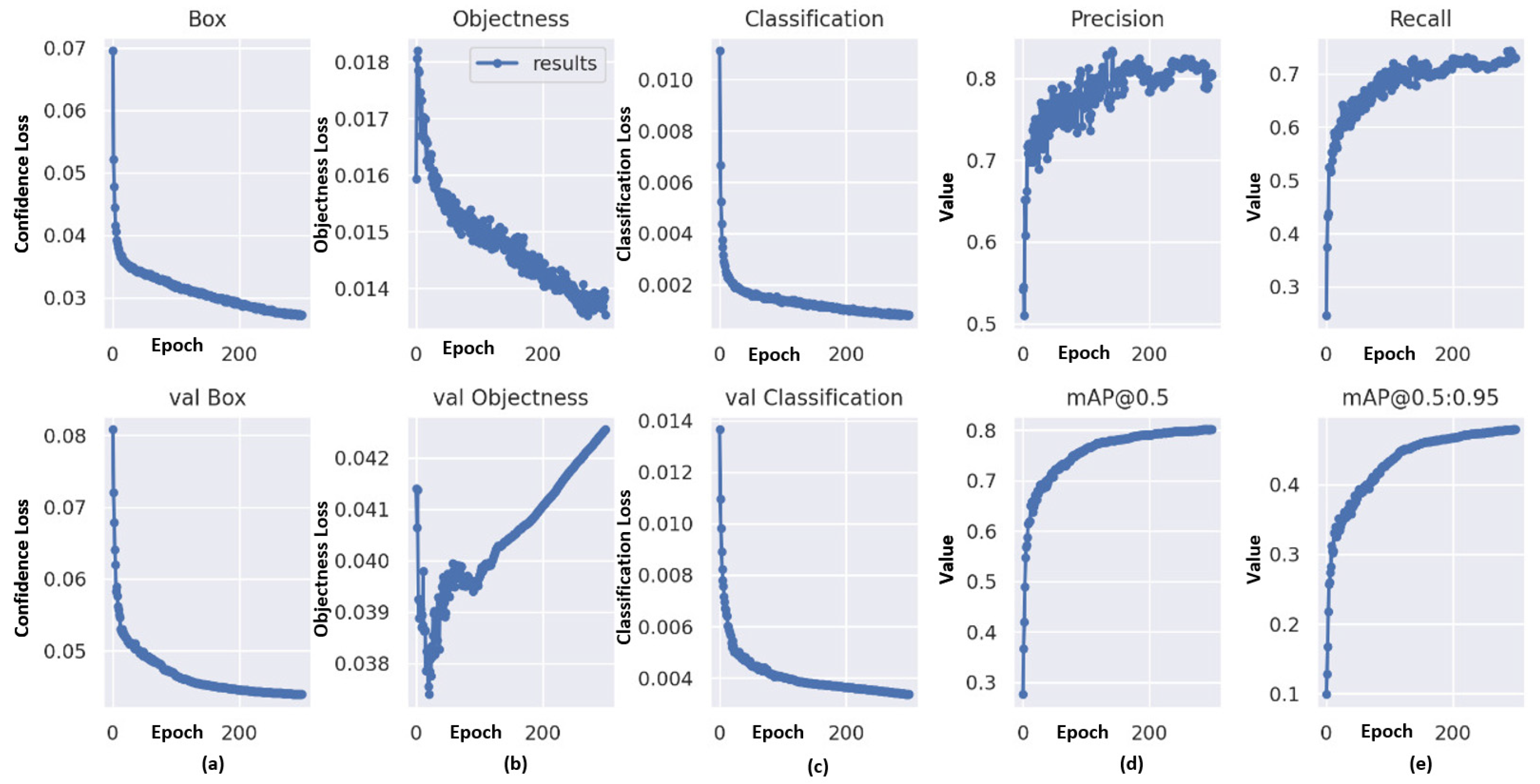
We trained our model using the architecture of the YOLOv7-tiny model as a starting point for the training process. The model was trained for 300 epochs, which took 8.715 h with the use of an Nvidia RTX 3060ti GPU computer.
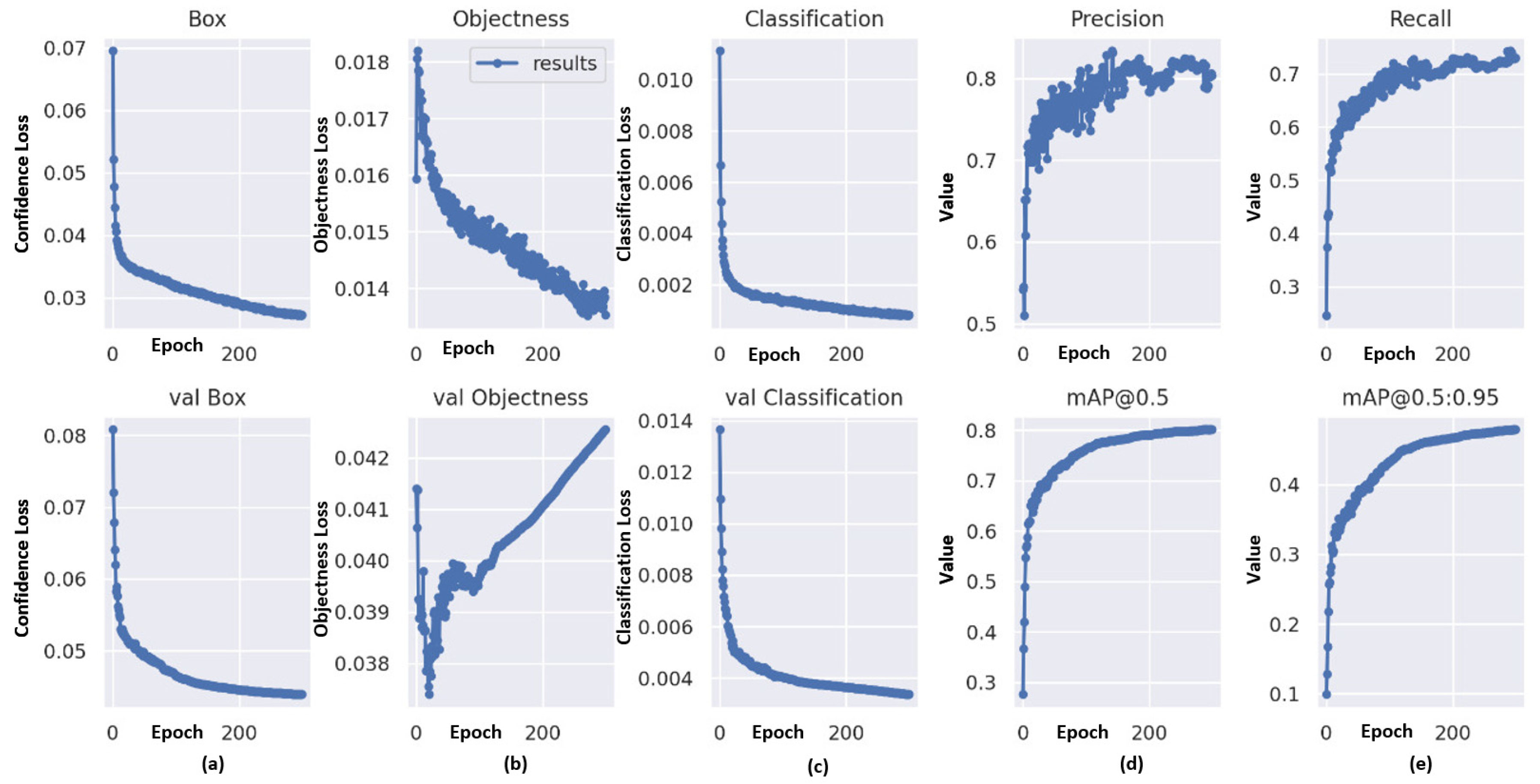
Figure 10 shows the plots of the functions of losses. It contains the loss of box regression that shows the way in which the boxes cover the vehicles, and also the capacity to locate the centers of each category of vehicles. In addition, it includes the classification loss, which represents the ability to differentiate between the different detected objects, and finally the abjectness loss, which is the probability that the detected vehicle exists in the ROI.
The training results of our pretrained YOLOv7-tiny model for object detection show that the precision, recall, and mAP increase as the number of epochs increases, indicating that the training process was effective. On the other hand, the errors in objectness, classification, and box decreased with the number of epochs, indicating that our model is well-trained.
The precision–recall curve is a graph that shows the trade-off between the precision and recall for a classifier. In the case of the YOLOv7-tiny model that was trained for vehicle detection and classification, the precision–recall curve is shown in
Figure 11 and it is based on the precision and recall data obtained for each class (i.e., car, truck, bus, and motorcycle).
From the obtained results, we can calculate the average precision (mAP) for all classes at a threshold of 0.5. The average precision for all classes is 0.801, which indicates that the model can detect and classify vehicles with high precision.
4.2. Experimental Results
To evaluate our application that counts vehicles in an intersection in the real world, we used the Nvidia Jetson Nano as a peripheral computing system. The experimental device was deployed at the intersection between Bouskoura and Casablanca (see
Figure 1). We used the Nvidia Jetson Nano to perform all the necessary steps in order to conduct the analysis, detection, tracking, and counting. The final step involved sending the counting results via MQTT to aid in the decision-making regarding expanding the intersection to mitigate congestion.
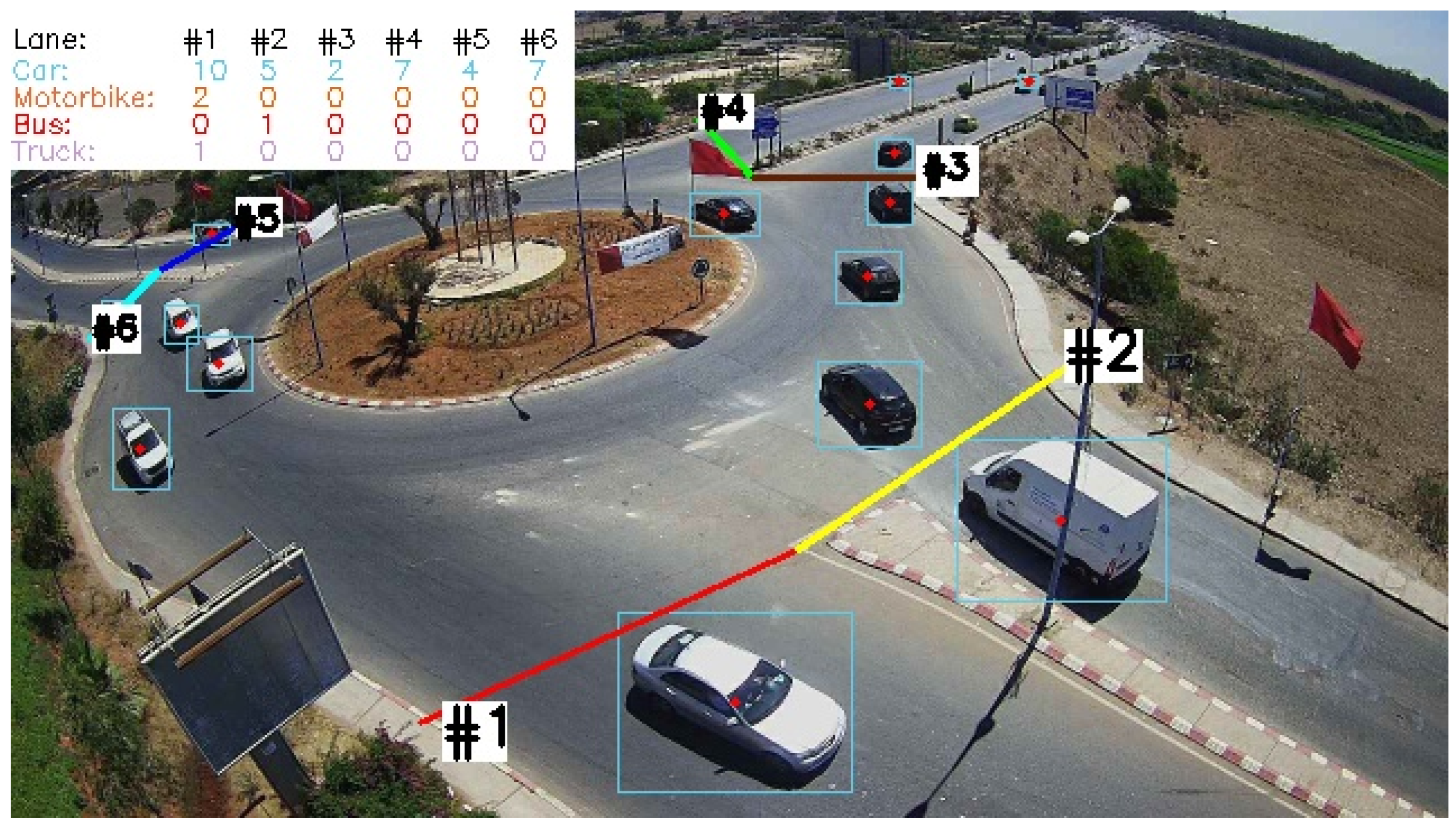
The detection, tracking, and counting results were displayed on a monitor connected via HDMI. We have demonstrated an example of the results obtained with an average inference execution speed of 16 FPS in
Figure 12. In addition, we captured two photos, one taken during the day and the other taken at night, to showcase the performance of our algorithm in different lighting conditions. The first photo was captured on 24 October 2022, at 06:44:26 with low lighting conditions. The other was taken at 13:44:00 on the same day. These results demonstrate the effectiveness of our solution in detecting and tracking vehicles under various lighting conditions.
4.2.1. System Evaluation
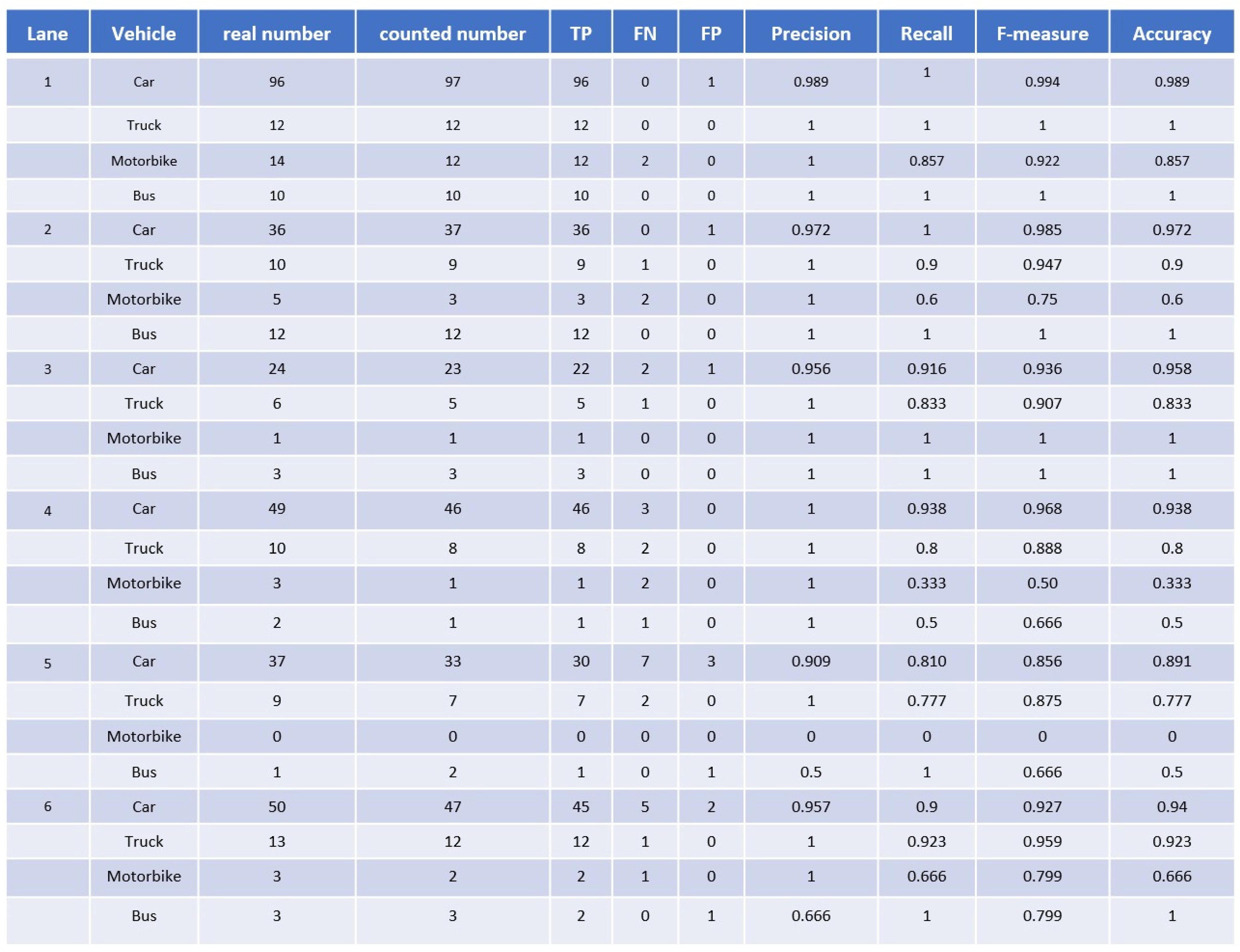
To evaluate the performance of our counting system, we use four metrics: precision, recall, F-measure, and accuracy. These metrics were calculated using the following parameters: true positive (TP), which represents the successfully counted vehicles; false negative (FN), which represents the vehicles that our system is not able to count; and false positive (FP), which represents the vehicles that are incorrectly counted.
The mathematical relationships between these parameters and the evaluation metrics are shown below:
Our system has shown promising results in most of the tested videos. The table (
Figure 13) displays the counting results of a previously tested video, with each of the six lanes at the intersection represented in the table. However, we did observe instances of false negatives in lanes 4, 5, and 6, which may be due to the detection not being entirely reliable, possibly due to the significant distance between the camera and these lanes.
4.2.2. Data Visualization
From the results sent by our smart camera installed at the intersection, we drew the diagrams below.
Figure 14 shows the counting results for the period from 5 December 2022 to 13 December 2022. It also shows the number of cars, trucks, buses, and motorcycles passing through each lane of the intersection. By analyzing these numbers, we can easily determine which lanes have the most traffic, as well as which days of the week have the most traffic. In addition, we specifically chose the days included in the diagrams because they occurred during rainy weather, and our model has been proven to be reliable in detecting vehicles in different weather conditions.
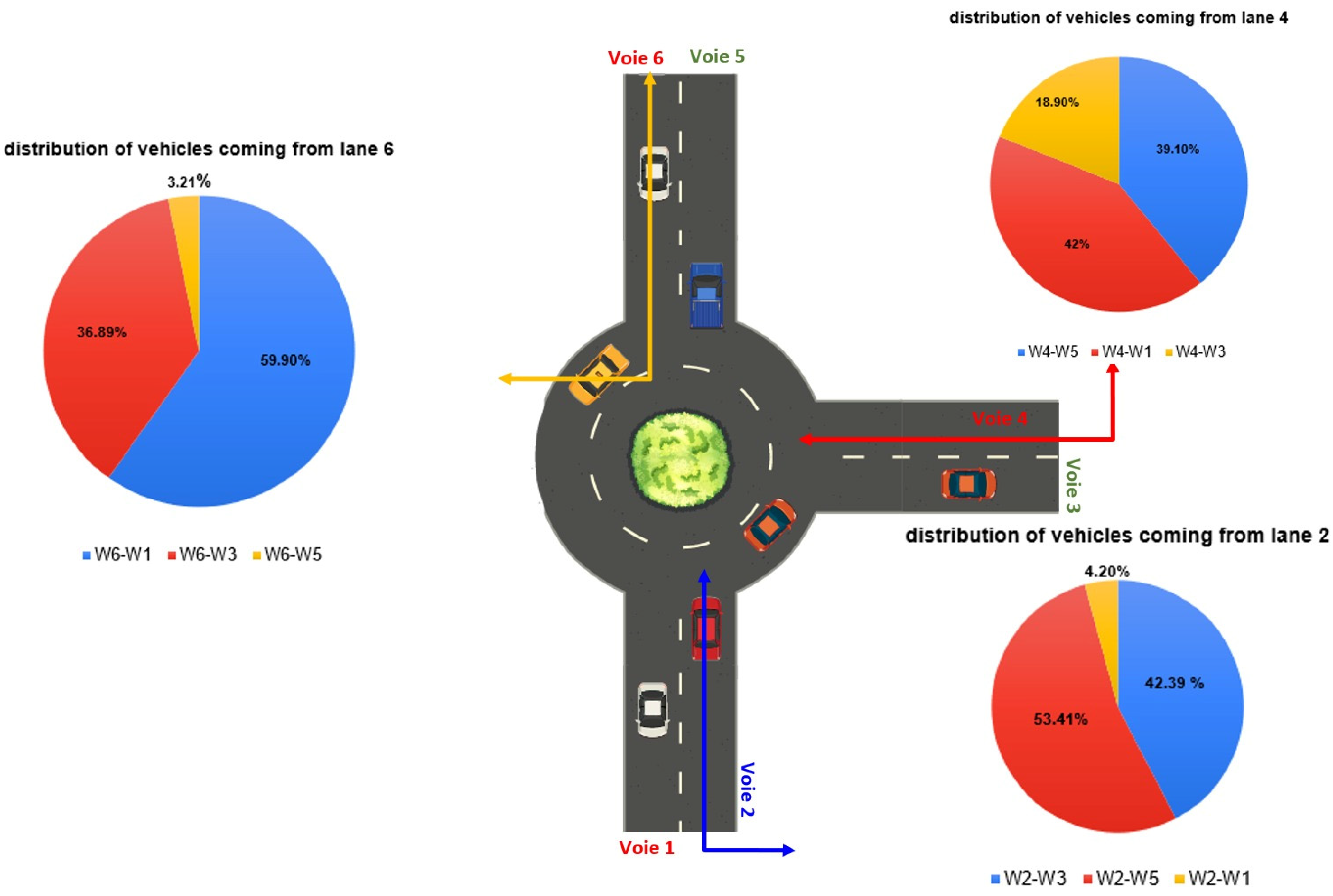
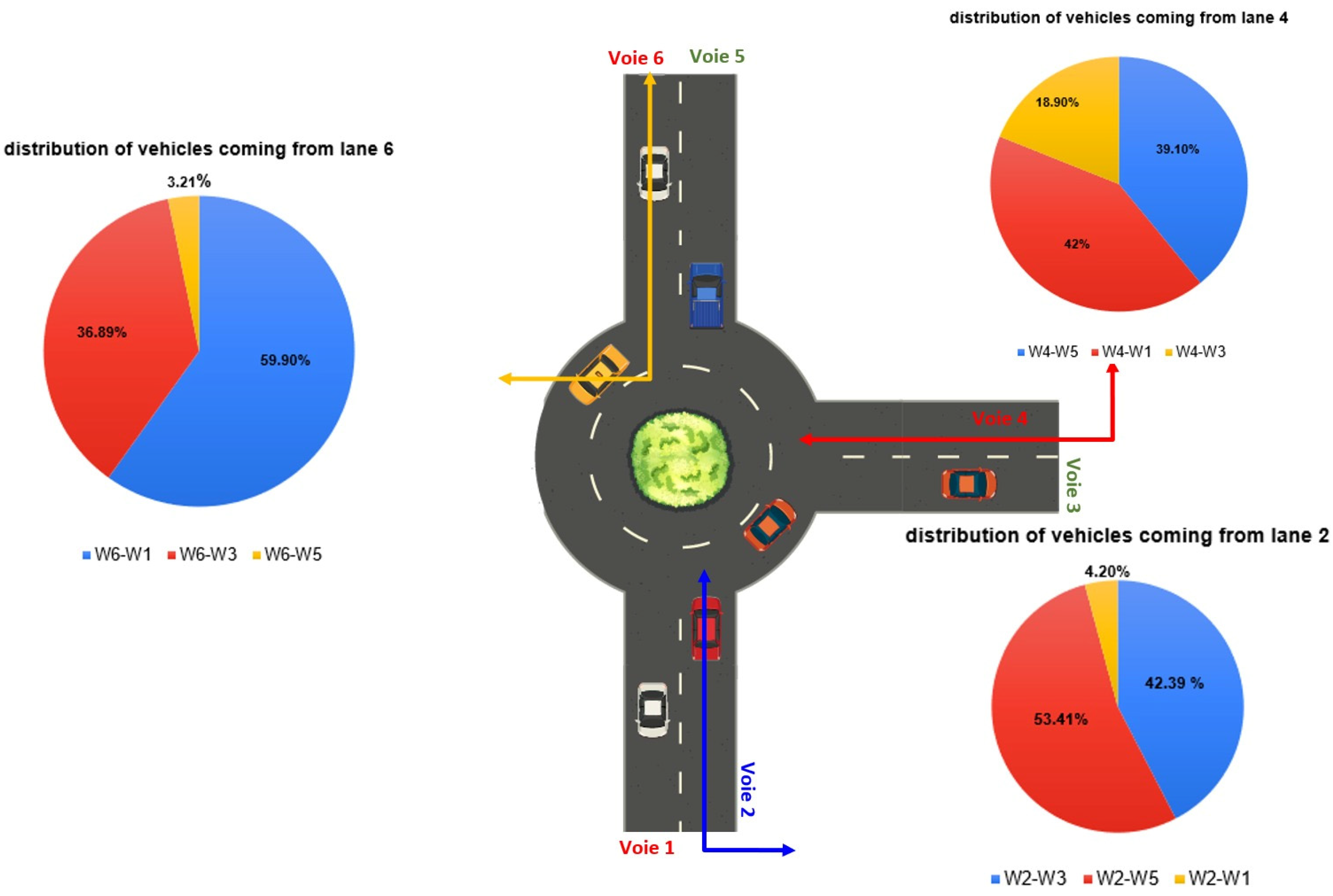
Figure 15 shows the representation of data sent by our system in the form of a pie chart. The data represent the percentage of each path taken by the vehicles on 8 December 2022.
5. Discussion
Traffic management plays a crucial role in tracking the growth of cities such as Bouskoura, and our system has demonstrated its reliability in the experimental phase. The data collected are a valuable tool that helps the municipality make informed decisions regarding changes to the infrastructure, as well as to better understand the impact of opening of a new shopping center in the city. Specifically, our system has helped the municipality of Bouskoura to calculate, by class, the number of vehicles that pass through the roundabout. It can also help to determine the percentage of vehicles from each lane, which has been instrumental in deciding what lanes to extend and how to manage traffic flow to support the economic growth of the city. Overall, our data-collection system is an invaluable tool for the Bouskoura municipality in making informed decisions about traffic management and infrastructure adaptation to better meet the needs of its growing population.
6. Conclusions
In summary, our proposed vehicle-counting and classification system, which is based on a combination of a customized YOLOv7-tiny model and the Deep SORT algorithm, offers several key advantages over existing methods. We demonstrated that our system accurately counts and tracks vehicles that are using different lanes of a roundabout intersection while also providing the percentage of the trajectories that are performed by the vehicles. Moreover, our system can be deployed on the Nvidia Jetson Nano card, which has high performance and low power consumption, making it suitable for real-world scenarios. However, our system has certain limitations in accurately detecting vehicles in complex scenarios that have high occlusion and are under different lighting conditions. Furthermore, the quality of the input video stream and the camera’s distance from the intersection can affect our system’s accuracy. To address these limitations and to further improve our system, we can explore additional deep-learning techniques. We can also consider using multiple cameras to capture a more comprehensive view of the intersection and to improve our system’s trajectory-estimation accuracy.
Author Contributions
Conceptualization, I.E. and M.A.S.; methodology, I.E., M.A.S. and A.A.; software, I.E. and Y.A.; validation, I.E., M.A.S. and Y.A.; writing—review and editing, I.E., M.A.S. and A.A. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
The data presented in this study are available on request from the corresponding author.
Acknowledgments
We wish to acknowledge the support of the LISAC Laboratory at the University Sidi Mohamed Ben Abdellah who worked in collaboration with Nextronic by Aba technology Company, who was the host of this work.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Ghazali, W.N.W.B.; Zulkifli, C.N.B.; Ponrahono, Z. The Effect of Traffic Congestion on Quality of Community Life. ICRP 2019, 2, 759–766. [Google Scholar] [CrossRef]
- Jiber, M.; Mbarek, A.; Yahyaouy, A.; Sabri, M.A.; Boumhidi, J. Road Traffic Prediction Model Using Extreme Learning Machine: The Case Study of Tangier, Morocco. Information 2020, 11, 542. [Google Scholar] [CrossRef]
- Patro, K.K.; Allam, J.P.; Hammad, M.; Tadeusiewicz, R.; Pławiak, P. SCovNet: A skip connection-based feature union deep learning technique with statistical approach analysis for the detection of COVID-19. Biocybern. Biomed. Eng. 2023, 43, 352–368. [Google Scholar] [CrossRef] [PubMed]
- Pedada, K.R.; Rao, B.; Patro, K.K.; Allam, J.P.; Jamjoom, M.M.; Samee, N.A. A novel approach for brain tumour detection using deep learning based technique. Biomed. Signal Process. Control. 2023, 82, 104549. [Google Scholar] [CrossRef]
- Shashirangana, J.; Padmasiri, H.; Meedeniya, D.; Perera, C.; Nayak, S.R.; Nayak, J.; Vimal, S.; Kadry, S. License plate recognition using neural architecture search for edge devices. Int. J. Intell. Syst. 2021, 37, 10211–10248. [Google Scholar] [CrossRef]
- Padmasiri, H.; Shashirangana, J.; Meedeniya, D.; Rana, O.; Perera, C. Automated License Plate Recognition for Resource-Constrained Environments. Sensors 2022, 22, 1434. [Google Scholar] [CrossRef] [PubMed]
- Hunkeler, U.; Truong, H.L.; Stanford-Clark, A. MQTT-S—A publish/subscribe protocol for Wireless Sensor Networks. In Proceedings of the 3rd International Conference on Communication Systems Software and Middleware and Workshops (COMSWARE’08), Bangalore, India, 6–10 January 2008; pp. 791–798. [Google Scholar] [CrossRef]
- Uday, P.; Shikha, B.S.; Uday, P.; Shubham, S. Using YOLO V7: Development of Complete VIDS Solution Based on Latest Requirements to Provide Highway Traffic and Incident Real-Time Info to the ATMS Control Room Using Artificial Intelligence. SSRN 2022, 4313791. Available online: https://papers.ssrn.com/sol3/papers.cfm?abstract_id=4313791 (accessed on 20 December 2022).
- Mansour Mohamed, A.S.M.M.; Rashid, M.M. Video-Based Vehicle Counting and Analysis using YOLOv5 and DeepSORT with Deployment on Jetson Nano. Asian J. Electr. Electron. Eng. 2022, 2, 11–20. Available online: https://journals.alambiblio.com/ojs/index.php/ajoeee/article/view/34 (accessed on 1 March 2023).
- Dinh, D.-L.; Nguyen, H.-N.; Thai, H.-T.; Le, K.-H. Towards AI-Based Traffic Counting System with Edge Computing. J. Adv. Transp. 2021, 2021, 5551976. [Google Scholar] [CrossRef]
- Valladares, S.; Toscano, M.; Tufiño, R.; Morillo, P.; Vallejo-Huanga, D. Performance Evaluation of the Nvidia Jetson Nano Through a Real-Time Machine Learning Application. In Intelligent Human Systems Integration; Russo, D., Ahram, T., Karwowski, W., Di Bucchianico, G., Taiar, R., Eds.; Springer: Cham, Switzerland, 2021; Volume 1322. [Google Scholar] [CrossRef]
- Han, Y.; Oruklu, E. Traffic sign recognition based on the NVIDIA Jetson TX1 embedded system using convolutional neural networks. In Proceedings of the 60th International Midwest Symposium on Circuits and Systems (MWSCAS), Boston, MA, USA, 6–9 August 2017; pp. 184–187. [Google Scholar] [CrossRef]
- Wang, Z.; Bai, B.; Xie, Y.; Xing, T.; Zhong, B.; Zhou, Q.; Meng, Y.; Xu, B.; Song, Z.; Xu, P.; et al. Robust and Fast Vehicle Turn-counts at Intersections via an Integrated Solution from Detection, Tracking and Trajectory Modeling. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Seattle, WA, USA, 14–19 June 2020; pp. 2598–2606. [Google Scholar] [CrossRef]
- Jiang, K.; Xie, T.; Yan, R.; Wen, X.; Li, D.; Jiang, H.; Jiang, N.; Feng, L.; Duan, X.; Wang, J. An Attention Mechanism-Improved YOLOv7 Object Detection Algorithm for Hemp Duck Count Estimation. Agriculture 2022, 12, 1659. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, H.; Xin, Z. Efficient Detection Model of Steel Strip Surface Defects Based on YOLO-V7. IEEE Access 2022, 10, 133936–133944. [Google Scholar] [CrossRef]
- DEEP LEARNING. YOLOv7: The Most Powerful Object Detection Algorithm (2023 Guide). Available online: https://viso.ai/deep-learning/yolov7-guide/#:~:text=Compared%20to%20PP%2DYOLOE%2DL,or%20106%25%20faster%20inference%20speed (accessed on 25 March 2023).
- WongKinYiu. YOLOv7 Official GitHub repository. Available online: https://github.com/WongKinYiu/yolov7 (accessed on 1 December 2022).
- Lamouik, I.; Yahyaouy, A.; Sabri, M.A. Model Predictive Control for Full Autonomous Vehicle Overtaking. Transp. Res. Rec. J. Transp. Res. Board 2023, 2677, 1193–1207. [Google Scholar] [CrossRef]
- Mandal, V.; Adu-Gyamfi, Y. Object Detection and Tracking Algorithms for Vehicle Counting: A Comparative Analysis. J. Big Data Anal. Transp. 2020, 2, 251–261. [Google Scholar] [CrossRef]
- Xiang, X.; Zhai, M.; Lv, N.; El Saddik, A. Vehicle Counting Based on Vehicle Detection and Tracking from Aerial Videos. Sensors 2018, 18, 2560. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Nvidia Corporation. Jetson NANO Module. Available online: https://developer.nvidia.com/embedded/jetson-nano (accessed on 2 January 2023).
| Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}