
ALIPPF-Controller to Stabilize the Unstable Motion and Eliminate the Non-Linear Oscillations of the Rotor Electro-Magnetic Suspension System





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
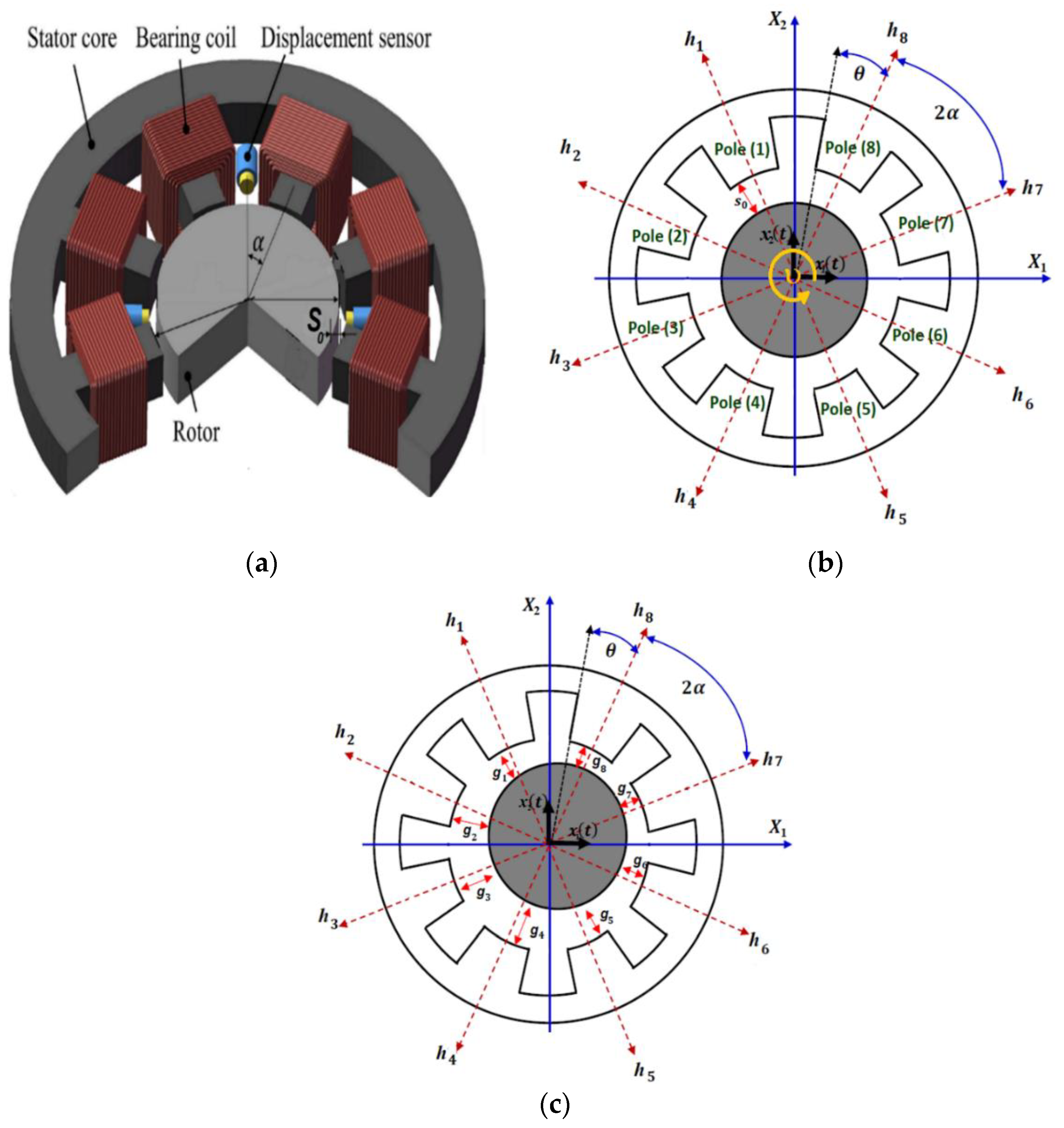
2. Equations of Motion
3. Analytical Investigations
4. Bifurcation Analysis and Control Performance
5. Numerical Validations and Temporal Oscillations
- Forward-sweep algorithm
- Set as the bifurcation control parameter with an initial value , step-size , and final value .
- Set () as zero initial conditions of the first simulation step.
- Set .
- .
- Compute the system parameters () as given in the Appendix A according to the values of the parameters given in step 4.
- Solve the system equations of motion (i.e., Equations (21)–(26)) using ODE45 MATLAB solver on the time interval to capture the steady-state motion.
- Find the maximum oscillation amplitudes of () on the time interval .
- Set , ().
- Set the initial conditions for the next simulation step such that , ().
- Increase the bifurcation parameter .
- If go to step (4), else go to step 12.
- Plot versus , () as small circles.
- End of forward-sweep algorithm.
- Backward-sweep algorithm
- Set as the bifurcation control parameter with an initial value , step-size , and final value .
- Set () as zero initial conditions of the first simulation step.
- Set .
- .
- Compute the system parameters () as given in the Appendix A according to the values of the parameters given in step 4.
- Solve the system equations of motion (i.e., Equations (21)–(26)) using ODE45 MATLAB solver on the time interval to capture the steady-state motion.
- Find the maximum oscillation amplitudes of () on the time interval .
- Set , ().
- Set the initial conditions for the next simulation step such that , ().
- Increase the bifurcation parameter .
- If go to step (4), else go to step 12.
- Plot versus , () as big dots.
- End of backward-sweep algorithm
6. Conclusions
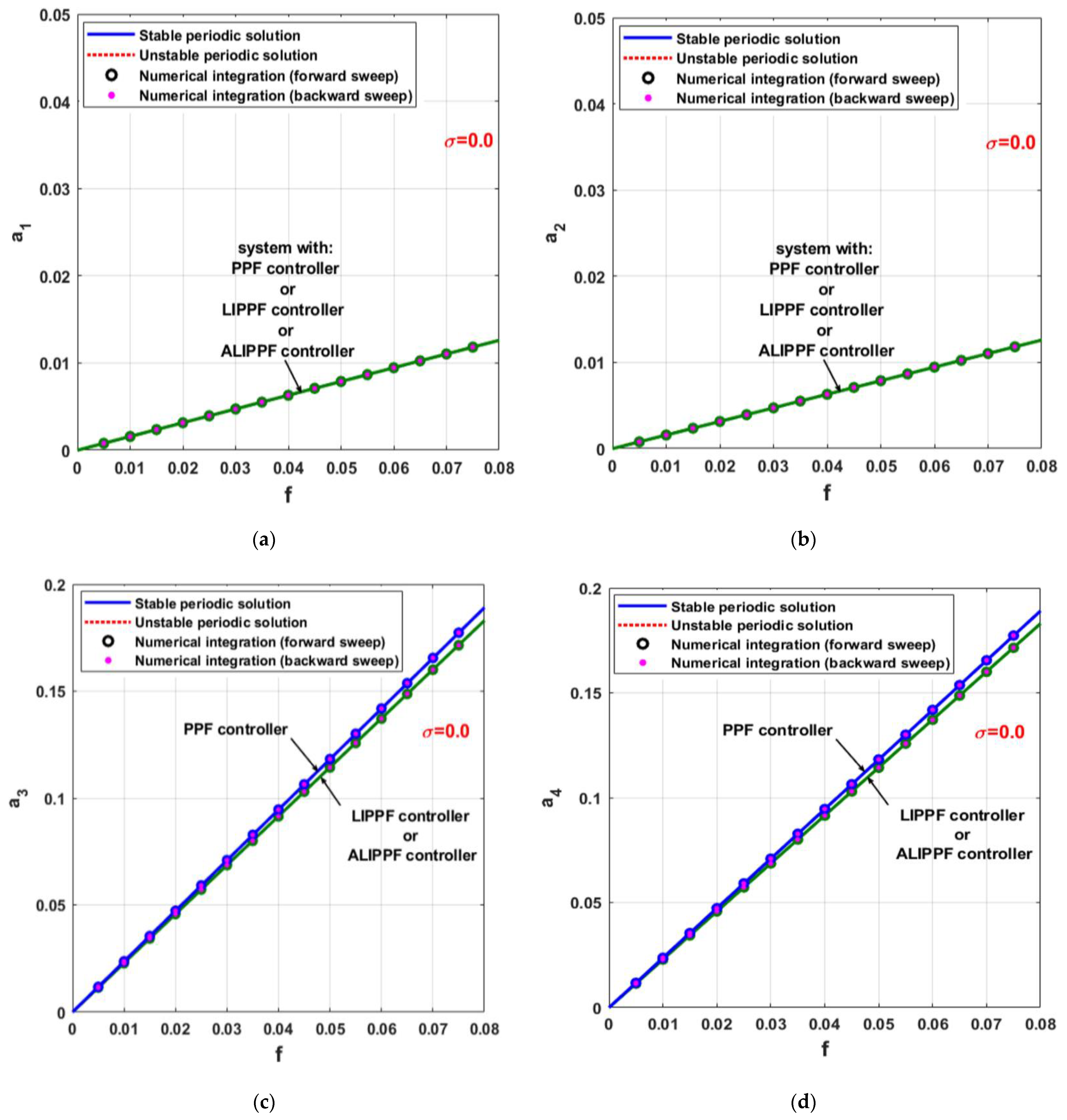
- The uncontrolled eight-pole electro-magnetic suspension system may respond as a linear system at the small rotor eccentricity () (i.e., ).
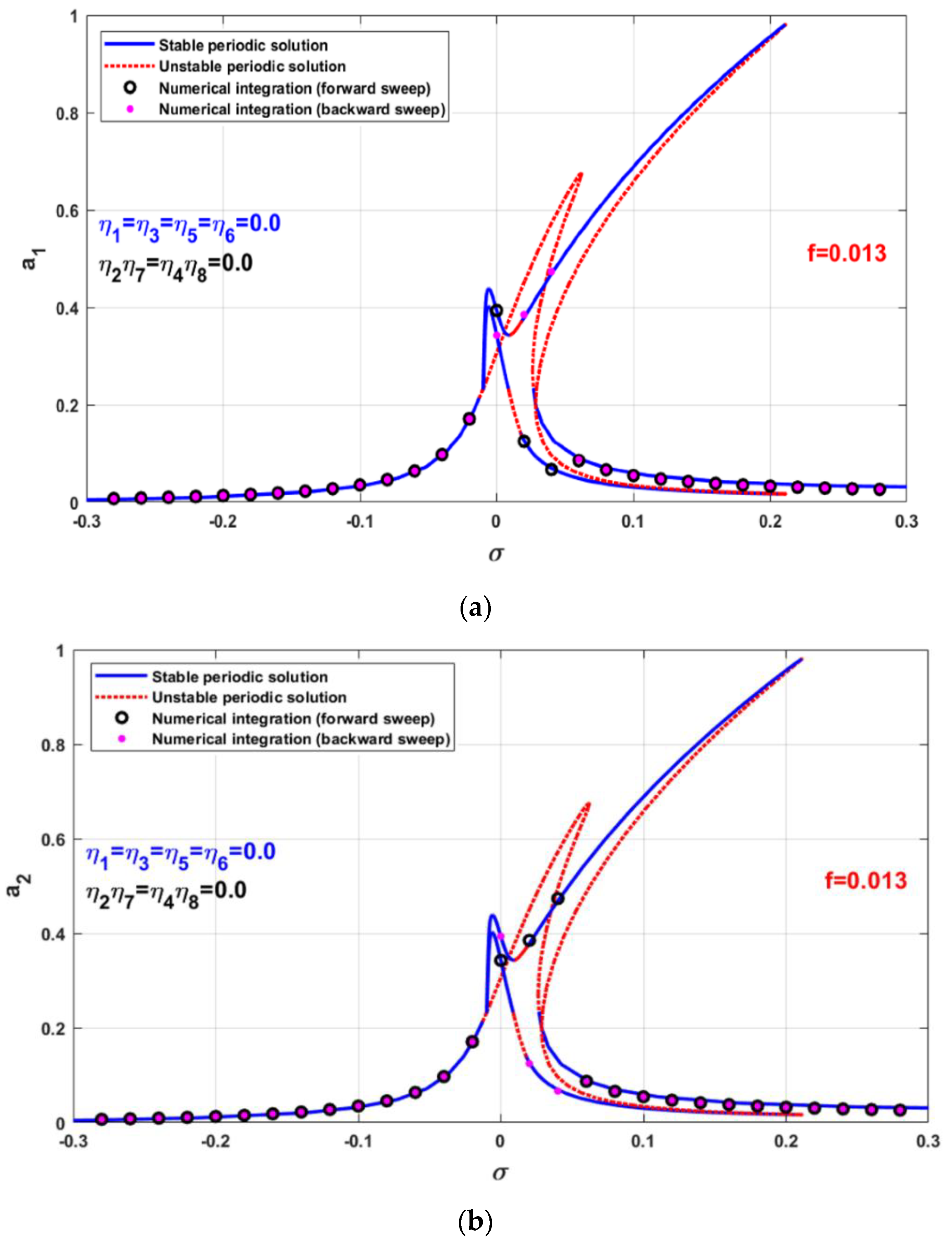
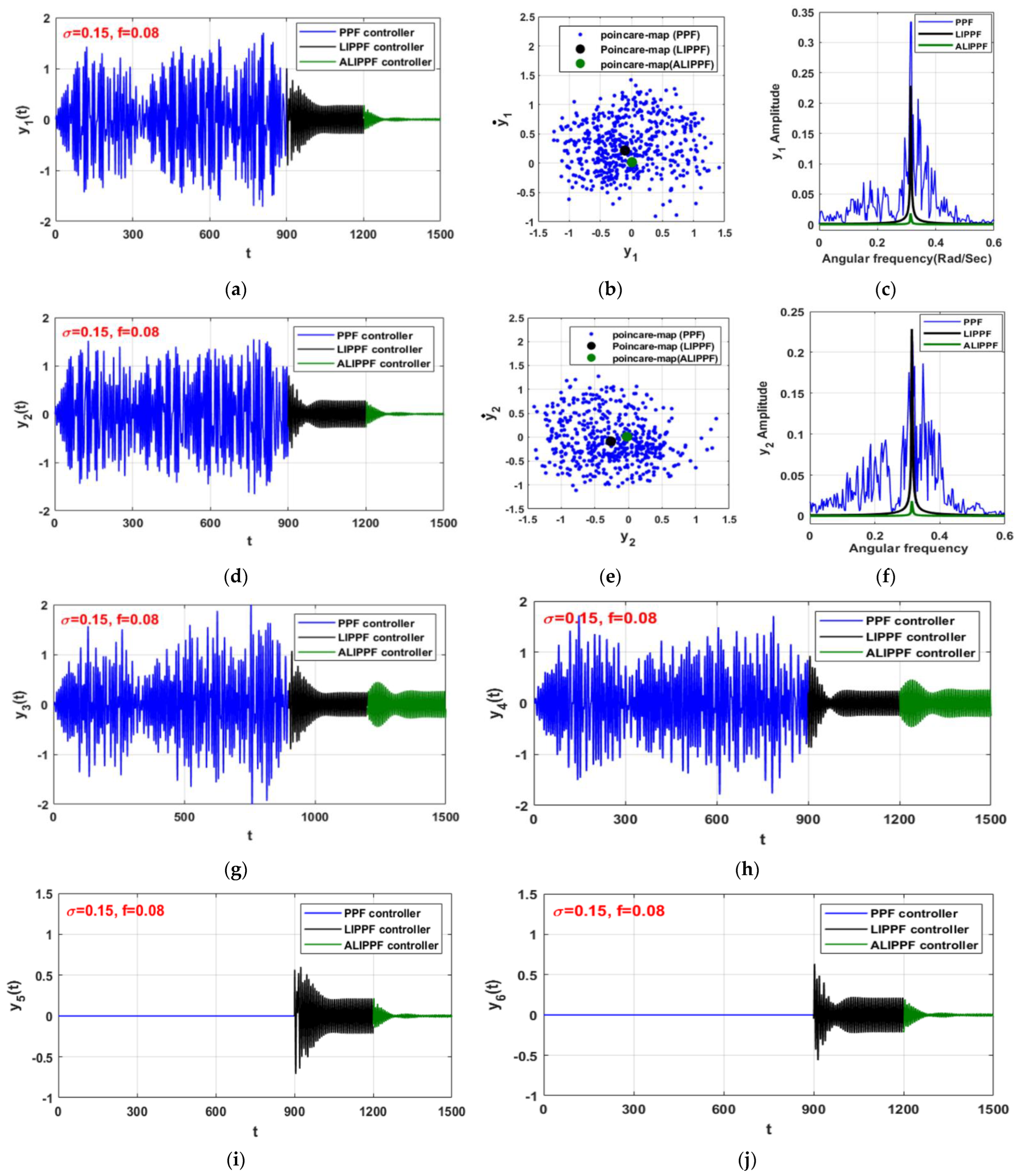
- At the large rotor eccentricity, the electro-magnetic suspension system may lose its stability to perform quasi-periodic or chaotic oscillations thanks to the complex bifurcation behaviors.
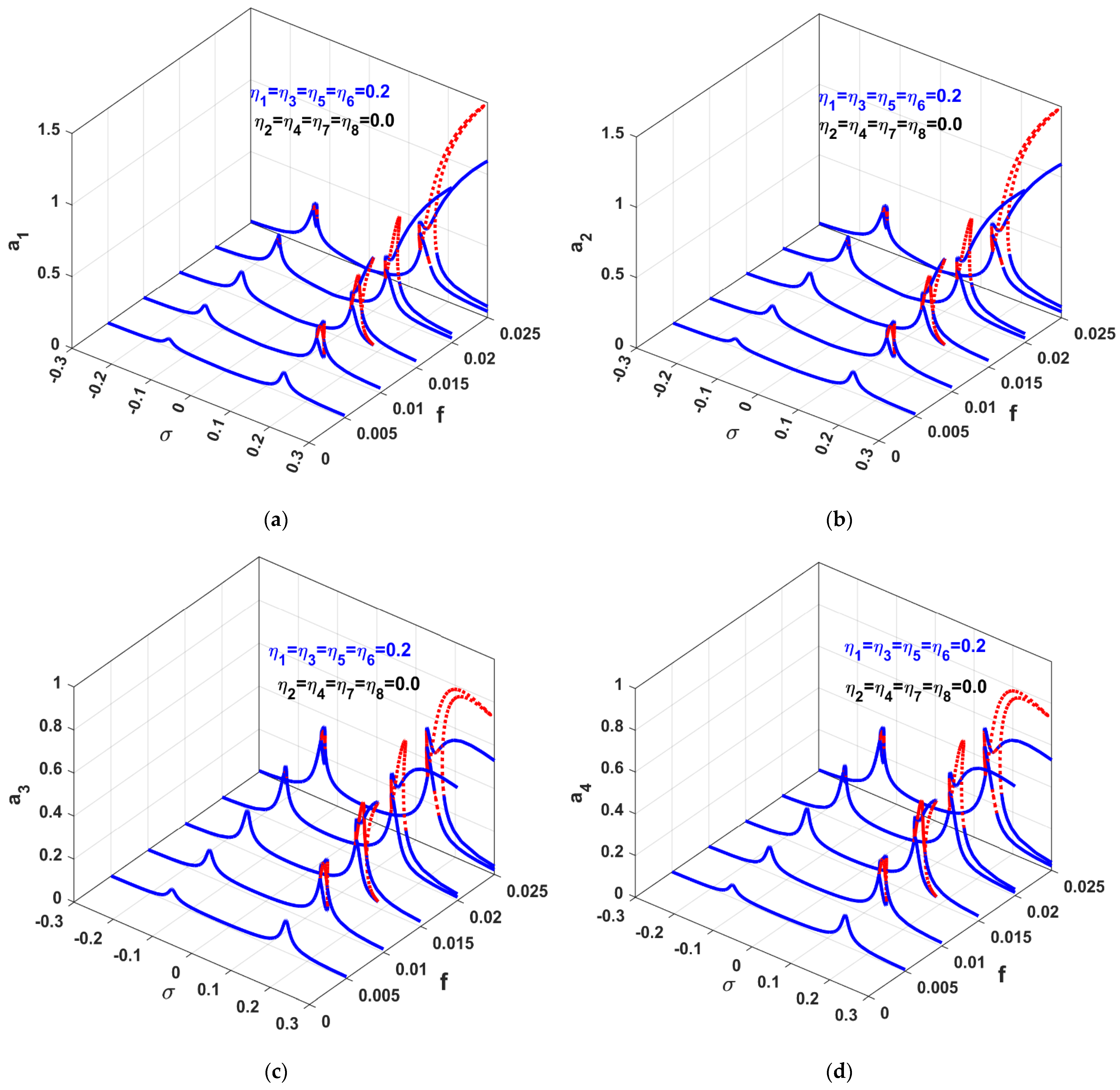
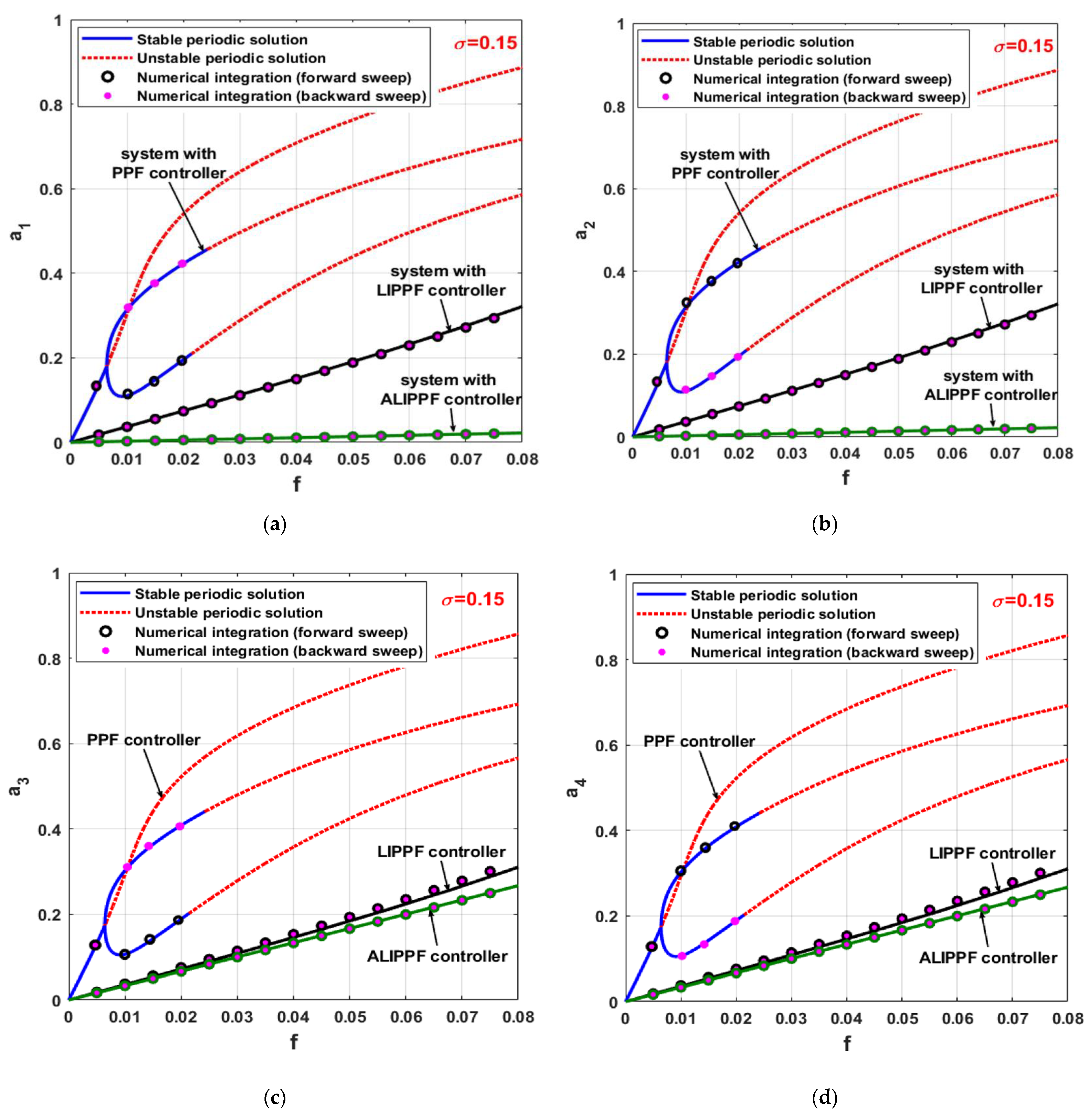
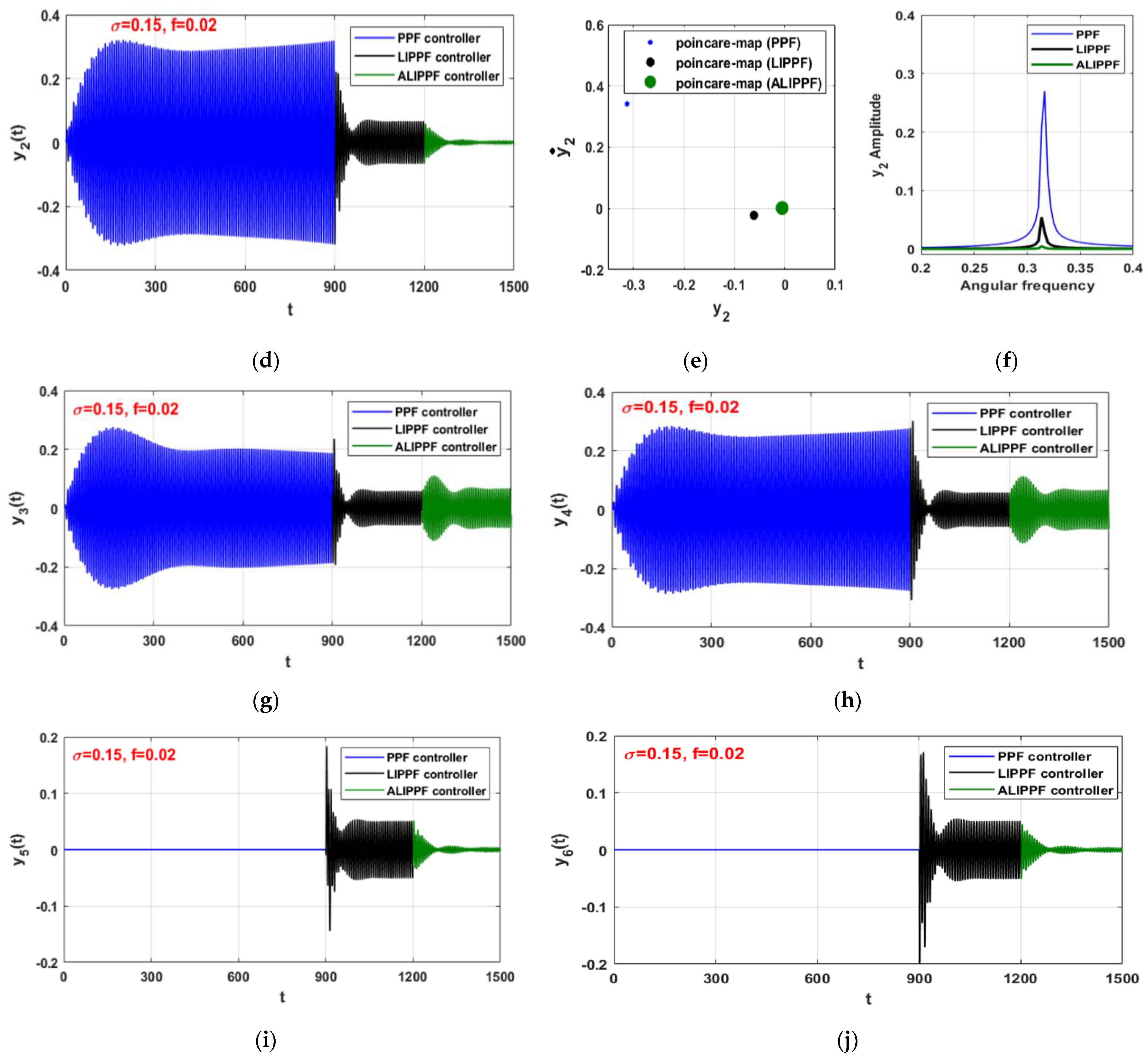
- Integrating the conventional PPF-controller into the electro-magnetic suspension system can eliminate the rotor vibration amplitudes at the perfect resonance conditions (i.e., ). However, the PPF-controller can add more excessive vibratory energy to the rotor system rather than suppress it if the perfect resonance conditions have been lost.
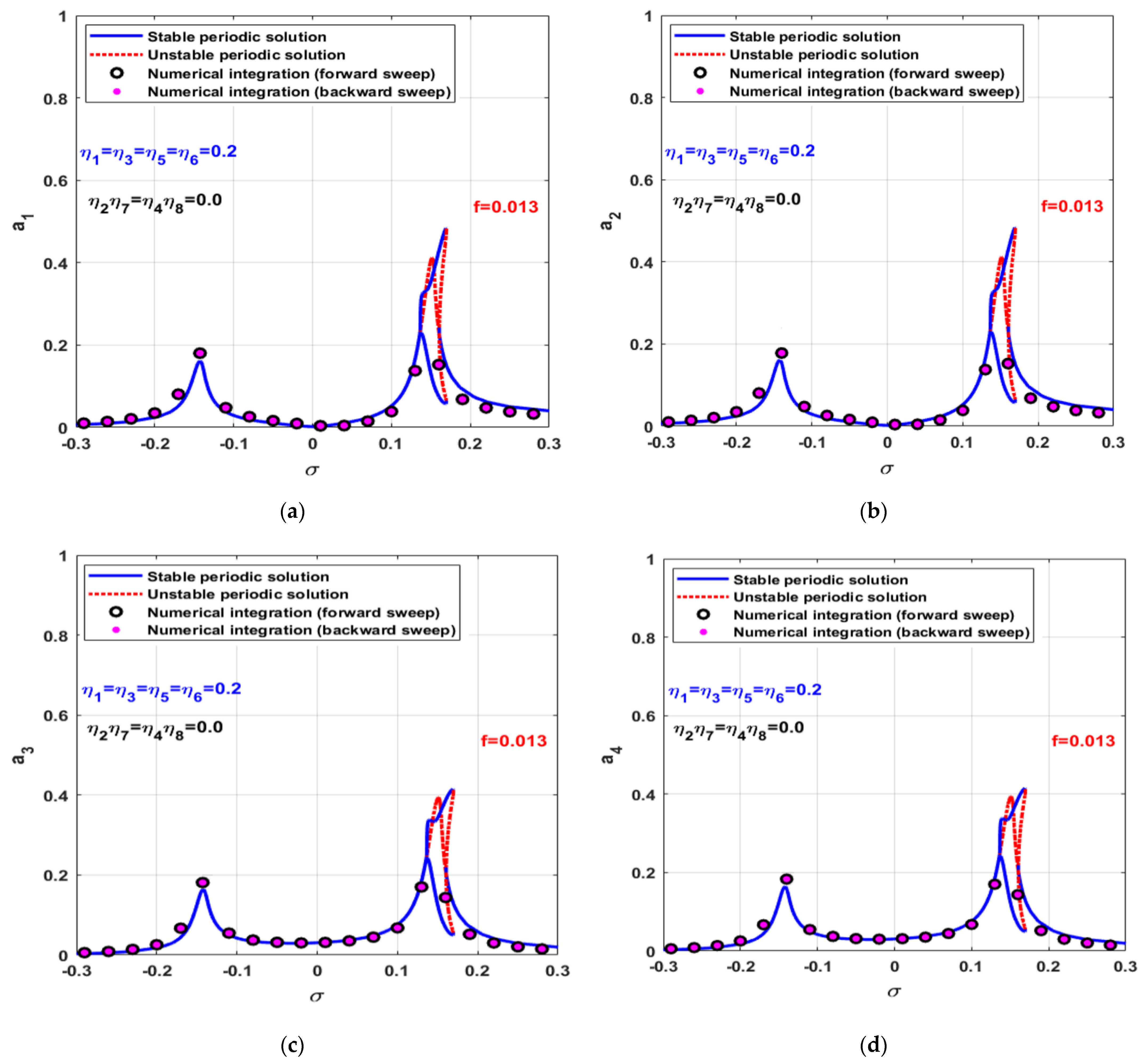
- The coupling of the LIR-controller to the eight-pole electromagnetic suspension system can eliminate the non-linear bifurcation and force the rotor to respond as a linear dynamical system. However, the controlled system may exhibit high oscillation at the perfect resonance conditions (i.e., ).
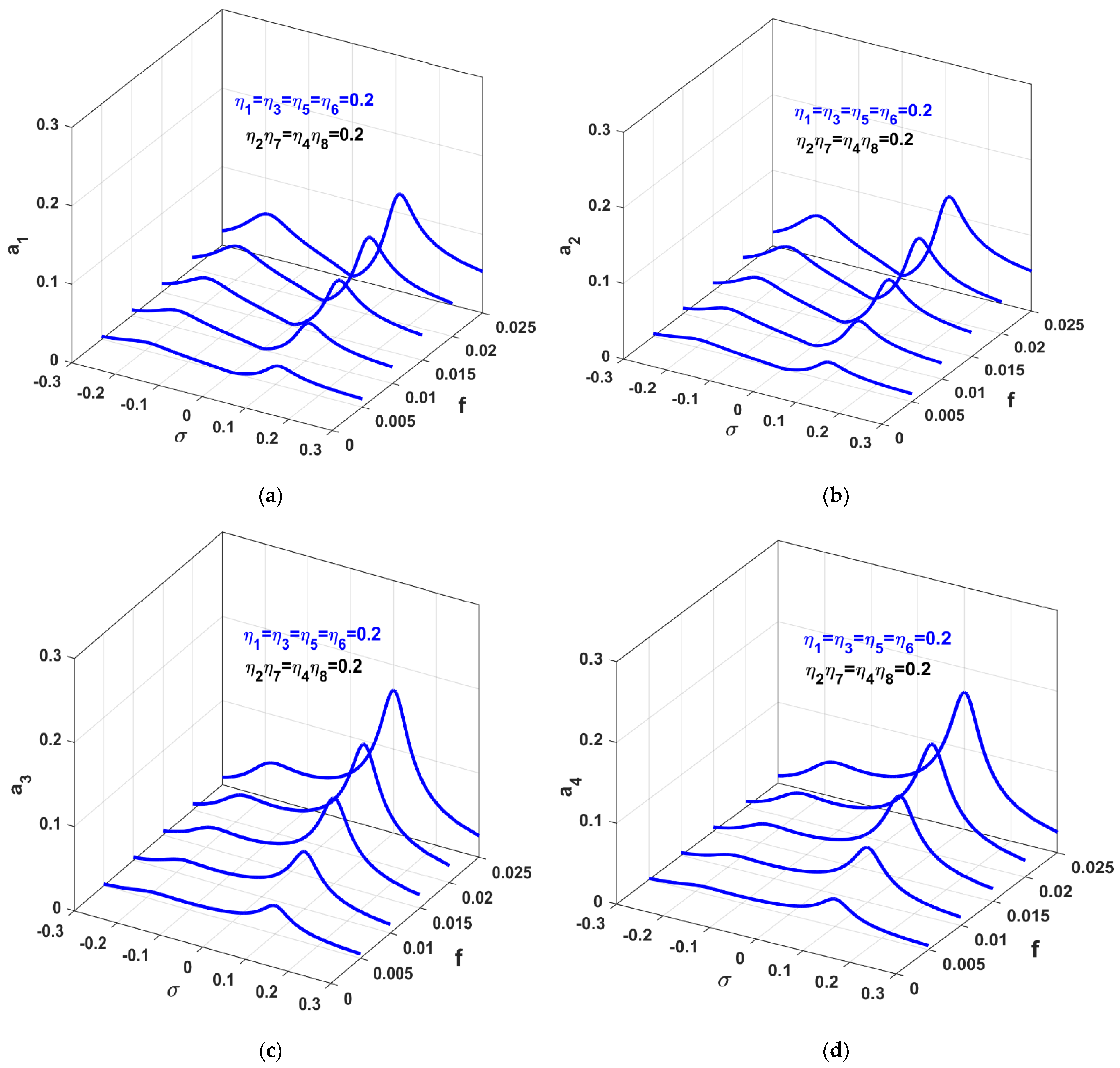
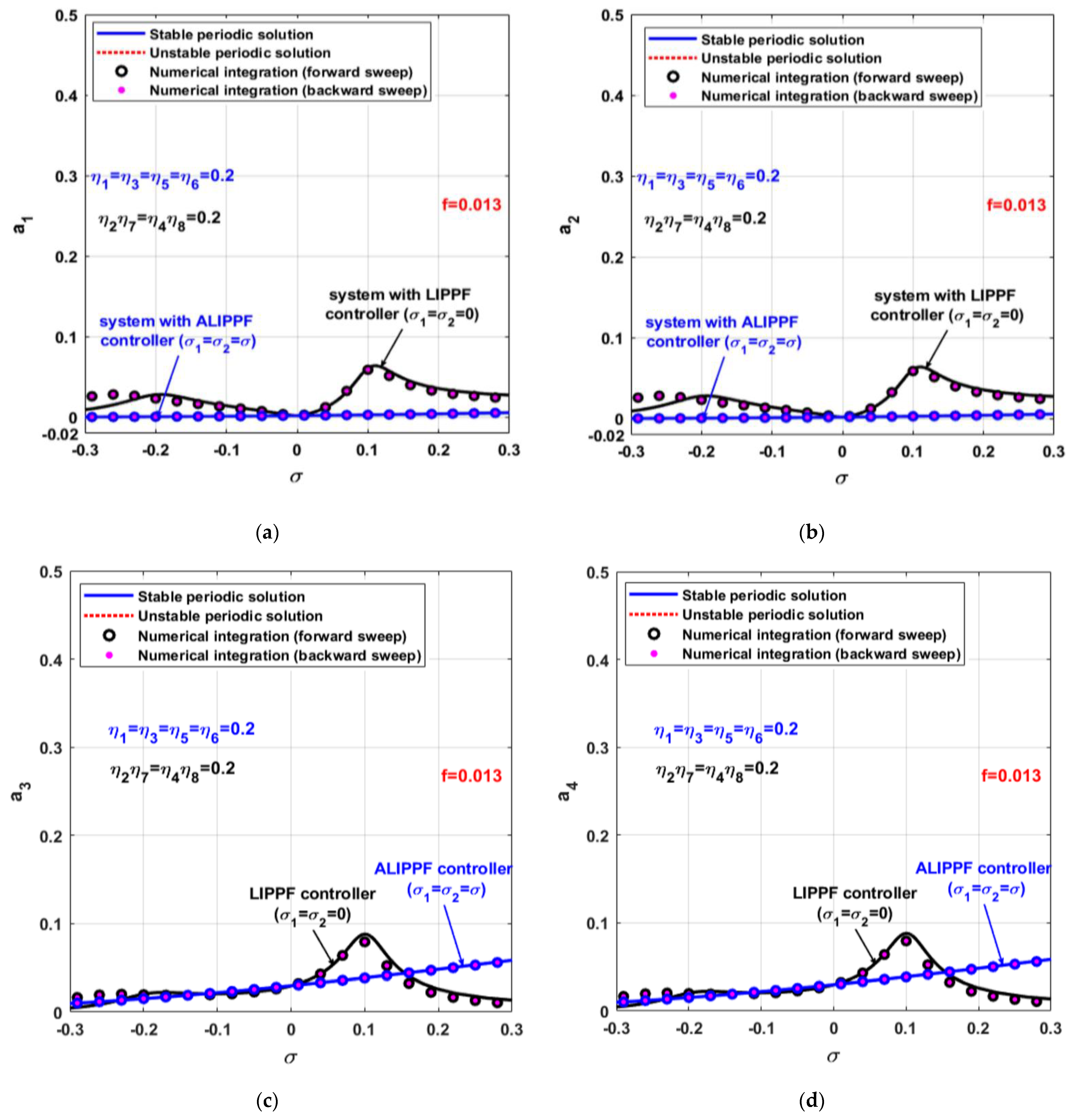
- The integration of the LIPPF-controller to the considered system can eliminate rotor oscillations at the perfect resonance conditions as well as suppress the non-linear vibrations to very small magnitudes if the resonance conditions have been lost.
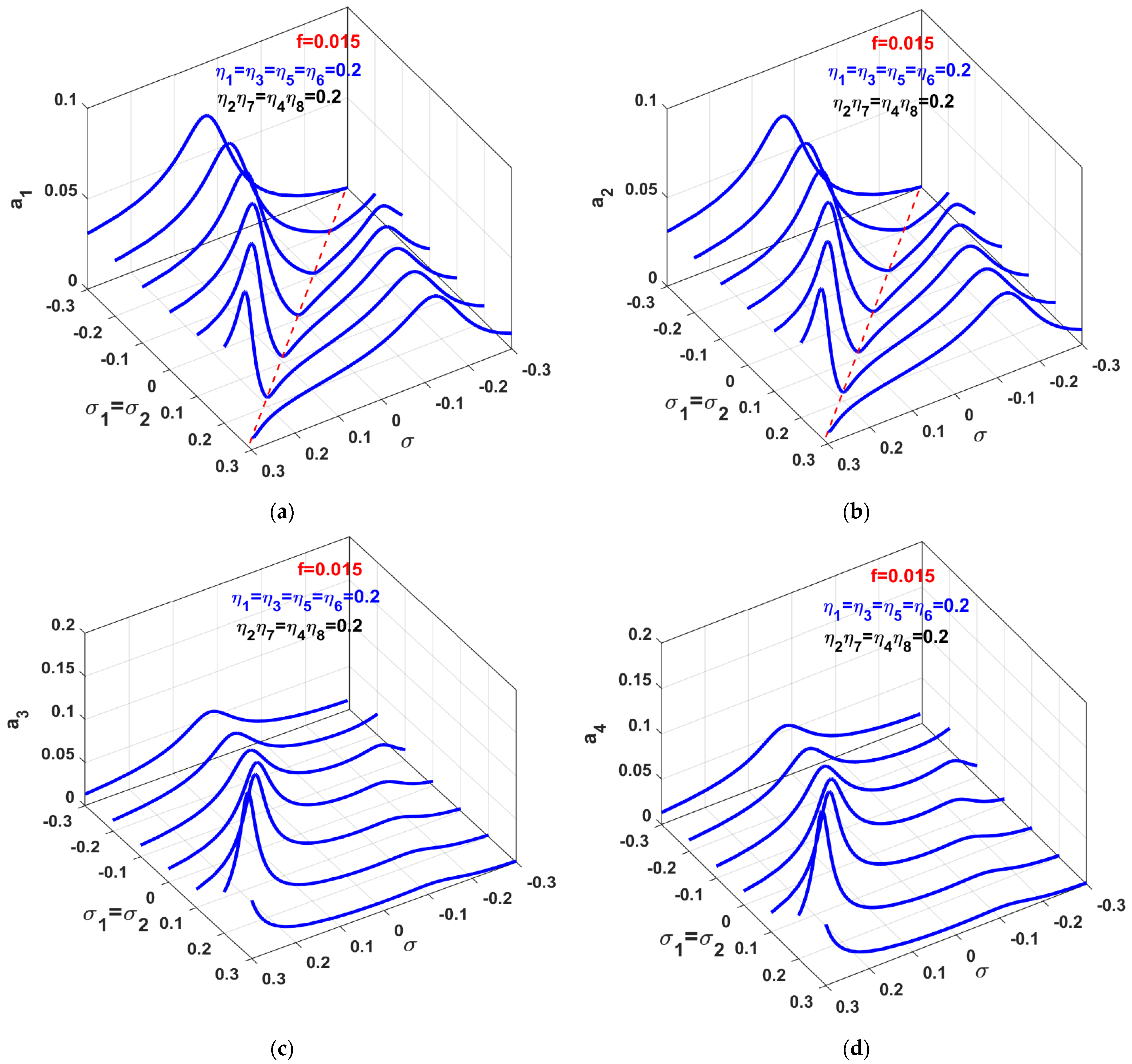
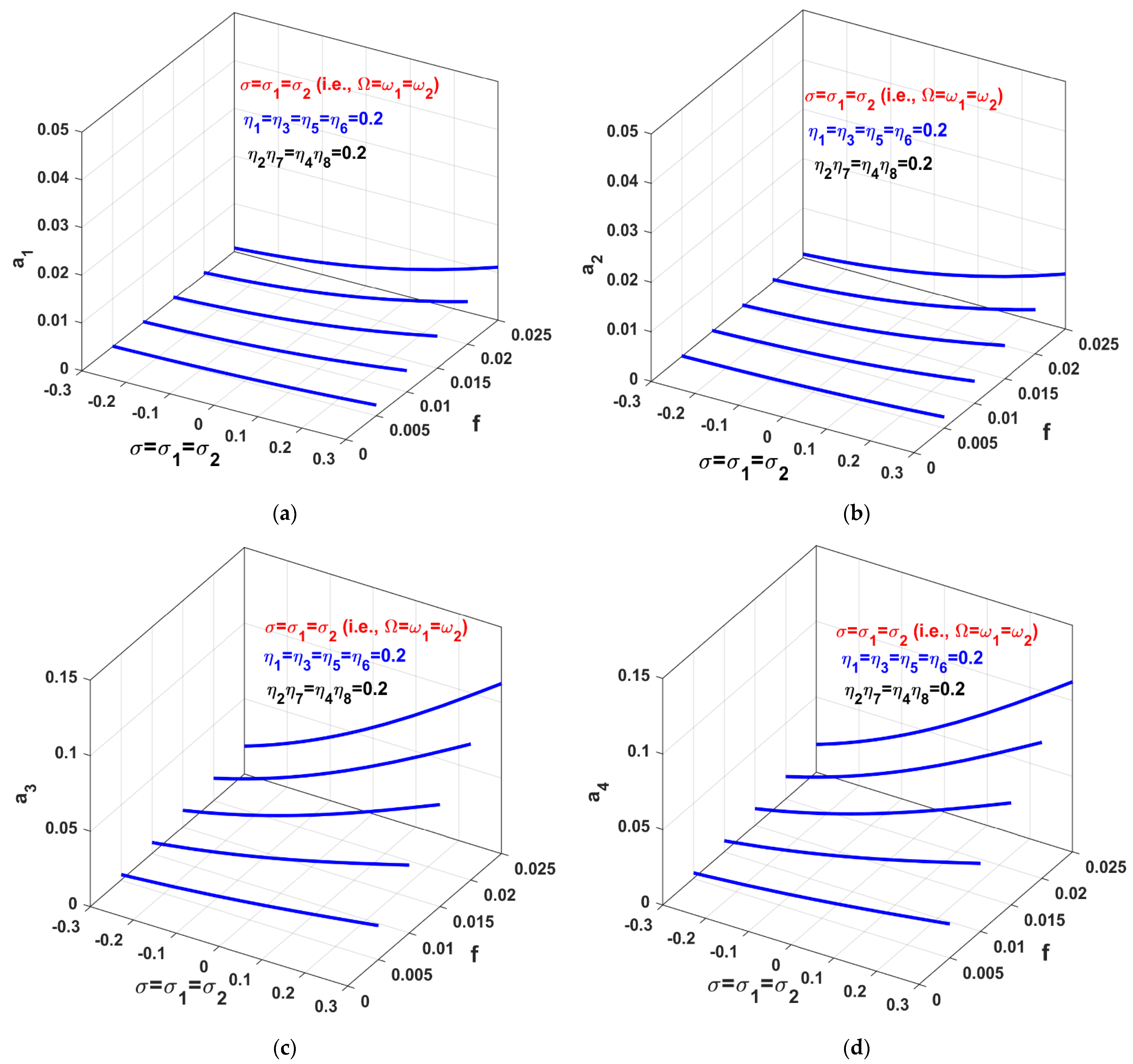
- The ALIPPF-controller (i.e., when setting ) can eliminate the undesired vibrations of the electro-magnetic suspension system to zero regardless of the angular speed and eccentricity of the rotating shaft.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| Instantaneous displacement, velocity, and acceleration of rotor system in direction, respectively. | |
| Instantaneous displacement, velocity, and acceleration of rotor system in direction, respectively. | |
| Instantaneous displacement, velocity, and acceleration of the second-order filter that coupled to the rotor system in direction. | |
| Instantaneous displacement, velocity, and acceleration of the second-order filter that coupled to the rotor system in direction. | |
| Instantaneous displacement and velocity of the first-order filter that coupled to rotor system in direction. | |
| Instantaneous displacement and velocity of the first-order filter that coupled to rotor system in direction. | |
| Linear damping parameter of the rotor system in and directions. | |
| Linear damping parameters of the second-order filters that coupled to the rotor system in and directions, respectively. | |
| The natural frequency of the rotor system in and directions. | |
| Natural frequencies of the second-order filters that coupled to the rotor system in and directions, respectively. | |
| Internal-loop feedback gains of the first-order filters that coupled to the rotor system in and directions, respectively. | |
| The angular speed of the rotor system. | |
| The rotor system eccentricity. | |
| Control signal gains of the ALIPPF-controller. | |
| Feedback signal gains of the ALIPPF-controller. | |
| Non-linear coupling coefficients of the rotor system. | |
| Non-linear coupling coefficients of the ALIPPF-controller. | |
| Steady-state oscillation amplitudes of the rotor system in and directions, respectively. | |
| Steady-state oscillation amplitudes of the ALIPPF-controller. | |
| The difference between the rotor angular speed () and its natural frequency (: . |
Appendix A
References
- Ji, J.C.; Yu, L.; Leung, A.Y.T. Bifurcation behavior of a rotor supported by active magnetic bearings. J. Sound Vib. 2000, 235, 133–151. [Google Scholar] [CrossRef]
- Saeed, N.A.; Mahrous, E.; Awrejcewicz, J. Non-linear dynamics of the six-pole rotor-AMBs under two different control configurations. Non-Linear Dyn. 2020, 101, 2299–2323. [Google Scholar] [CrossRef]
- Saeed, N.A.; Awwad, E.M.; El-Meligy, M.A.; Nasr, E.S.A. Radial versus Cartesian Control Strategies to Stabilize the Non-linear Whirling Motion of the Six-Pole Rotor-AMBs. IEEE Access 2020, 8, 138859–138883. [Google Scholar] [CrossRef]
- Ji, J.C.; Hansen, C.H. Non-linear oscillations of a rotor in active magnetic bearings. J. Sound Vib. 2001, 240, 599–612. [Google Scholar] [CrossRef]
- Ji, J.C.; Leung, A.Y.T. Non-linear oscillations of a rotor-magnetic bearing system under superharmonic resonance conditions. Int. J. Non-Linear Mech. 2003, 38, 829–835. [Google Scholar] [CrossRef]
- El-Shourbagy, S.M.; Saeed, N.A.; Kamel, M.; Raslan, K.R.; Abouel Nasr, E.; Awrejcewicz, J. On the Performance of a Non-linear Position-Velocity Controller to Stabilize Rotor-Active Magnetic-Bearings System. Symmetry 2021, 13, 2069. [Google Scholar] [CrossRef]
- Saeed, N.A.; Mahrous, E.; Abouel Nasr, E.; Awrejcewicz, J. Non-linear dynamics and motion bifurcations of the rotor active magnetic bearings system with a new control scheme and rub-impact force. Symmetry 2021, 13, 1502. [Google Scholar] [CrossRef]
- Zhang, W.; Zhan, X.P. Periodic and chaotic motions of a rotor-active magnetic bearing with quadratic and cubic terms and time-varying stiffness. Non-Linear Dyn. 2005, 41, 331–359. [Google Scholar] [CrossRef]
- Zhang, W.; Yao, M.H.; Zhan, X.P. Multi-pulse chaotic motions of a rotor-active magnetic bearing system with time-varying stiffness. Chaos Solitons Fractals 2006, 27, 175–186. [Google Scholar] [CrossRef]
- Zhang, W.; Zu, J.W.; Wang, F.X. Global bifurcations and chaos for a rotor-active magnetic bearing system with time-varying stiffness. Chaos Solitons Fractals 2008, 35, 586–608. [Google Scholar] [CrossRef]
- Zhang, W.; Zu, J.W. Transient and steady non-linear responses for a rotor-active magnetic bearings system with time-varying stiffness. Chaos Solitons Fractals 2008, 38, 1152–1167. [Google Scholar] [CrossRef]
- Li, J.; Tian, Y.; Zhang, W.; Miao, S.F. Bifurcation of multiple limit cycles for a rotor-active magnetic bearings system with time-varying stiffness. Int. J. Bifurc. Chaos 2008, 18, 755–778. [Google Scholar] [CrossRef]
- Li, J.; Tian, Y.; Zhang, W. Investigation of relation between singular points and number of limit cycles for a rotor–AMBs system. Chaos Solitons Fractals 2009, 39, 1627–1640. [Google Scholar] [CrossRef]
- El-Shourbagy, S.M.; Saeed, N.A.; Kamel, M.; Raslan, K.R.; Aboudaif, M.K.; Awrejcewicz, J. Control Performance, Stability Conditions, and Bifurcation Analysis of the Twelve-Pole Active Magnetic Bearings System. Appl. Sci. 2021, 11, 10839. [Google Scholar] [CrossRef]
- Saeed, N.A.; Kandil, A. Two different control strategies for 16-pole rotor active magnetic bearings system with constant stiffness coefficients. Appl. Math. Model. 2021, 92, 1–22. [Google Scholar] [CrossRef]
- Wu, R.; Zhang, W.; Yao, M.H. Non-linear vibration of a rotor-active magnetic bearing system with 16-pole legs. In Proceedings of the International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Cleveland, OH, USA, 6–9 August 2017. [Google Scholar] [CrossRef]
- Wu, R.; Zhang, W.; Yao, M.H. Analysis of non-linear dynamics of a rotor-active magnetic bearing system with 16-pole legs. In Proceedings of the International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Cleveland, OH, USA, 6–9 August 2017. [Google Scholar] [CrossRef]
- Wu, R.Q.; Zhang, W.; Yao, M.H. Non-linear dynamics near resonances of a rotor-active magnetic bearings system with 16-pole legs and time varying stiffness. Mech. Syst. Signal Process. 2018, 100, 113–134. [Google Scholar] [CrossRef]
- Zhang, W.; Wu, R.Q.; Siriguleng, B. Non-linear Vibrations of a Rotor-Active Magnetic Bearing System with 16-Pole Legs and Two Degrees of Freedom. Shock Vib. 2020, 2020, 5282904. [Google Scholar] [CrossRef]
- Ma, W.S.; Zhang, W.; Zhang, Y.F. Stability and multi-pulse jumping chaotic vibrations of a rotor-active magnetic bearing system with 16-pole legs under mechanical-electric-electro-magnetic excitations. Eur. J. Mech. A/Solids 2021, 85, 104120. [Google Scholar] [CrossRef]
- Ishida, Y.; Inoue, T. Vibration suppression of non-linear rotor systems using a dynamic damper. J. Vib. Control 2007, 13, 1127–1143. [Google Scholar] [CrossRef]
- Saeed, N.A.; Awwad, E.M.; El-Meligy, M.A.; Nasr, E.S.A. Sensitivity analysis and vibration control of asymmetric non-linear rotating shaft system utilizing 4-pole AMBs as an actuator. Eur. J. Mech. A/Solids 2021, 86, 104145. [Google Scholar] [CrossRef]
- Saeed, N.A.; Eissa, M. Bifurcation analysis of a transversely cracked non-linear Jeffcott rotor system at different resonance cases. Int. J. Acoust. Vib. 2019, 24, 284–302. [Google Scholar] [CrossRef]
- Saeed, N.A.; Awwad, E.M.; El-Meligy, M.A.; Nasr, E.S.A. Analysis of the rub-impact forces between a controlled non-linear rotating shaft system and the electromagnet pole legs. Appl. Math. Model. 2021, 93, 792–810. [Google Scholar] [CrossRef]
- Shan, J.; Liu, H.; Sun, D. Slewing and vibration control of a single-link flexible manipulator by positive position feedback (PPF). Mechatronics 2005, 15, 487–503. [Google Scholar] [CrossRef]
- Ahmed, B.; Pota, H.R. Dynamic compensation for control of a rotary wing UAV using positive position feedback. J. Intell. Robot. Syst. 2011, 61, 43–56. [Google Scholar] [CrossRef] [Green Version]
- Warminski, J.; Bochenski, M.; Jarzyna, W.; Filipek, P.; Augustyinak, M. Active suppression of non-linear composite beam vibrations by selected control algorithms. Commun. Non-Linear Sci. Numer. Simul. 2011, 16, 2237–2248. [Google Scholar] [CrossRef]
- El-Ganaini, W.A.; Saeed, N.A.; Eissa, M. Positive position feedback (PPF) controller for suppression of nonlinear system vibration. Nonlinear Dyn. 2013, 72, 517–537. [Google Scholar] [CrossRef]
- Saeed, N.A.; Kandil, A. Lateral vibration control and stabilization of the quasiperiodic oscillations for rotor-active magnetic bearings system. Nonlinear Dyn. 2019, 98, 1191–1218. [Google Scholar] [CrossRef]
- Diaz, I.M.; Pereira, E.; Reynolds, P. Integral resonant control scheme for cancelling human-induced vibrations in light-weight pedestrian structures. Struct. Control Health Monit. 2012, 19, 55–69. [Google Scholar] [CrossRef]
- Al-Mamun, A.; Keikha, E.; Bhatia, C.S.; Lee, T.H. Integral resonant control for suppression of resonance in piezoelectric micro-actuator used in precision servomechanism. Mechatronics 2013, 23, 1–9. [Google Scholar] [CrossRef]
- Omidi, E.; Mahmoodi, S.N. Non-linear integral resonant controller for vibration reduction in non-linear systems. Acta Mech. Sin. 2016, 32, 925–934. [Google Scholar] [CrossRef]
- MacLean, J.D.J.; Sumeet, S.A. A modified linear integral resonant controller for suppressing jump phenomenon and hysteresis in micro-cantilever beam structures. J. Sound Vib. 2020, 480, 115365. [Google Scholar] [CrossRef]
- Omidi, E.; Mahmoodi, S.N. Sensitivity analysis of the Non-linear Integral Positive Position Feedback and Integral Resonant controllers on vibration suppression of non-linear oscillatory systems. Commun. Non-Linear Sci. Numer. Simul. 2015, 22, 149–166. [Google Scholar] [CrossRef]
- Omidi, E.; Mahmoodi, S.N. Non-linear vibration suppression of flexible structures using non-linear modified positive position feedback approach. Non-Linear Dyn. 2015, 79, 835–849. [Google Scholar] [CrossRef]
- Saeed, N.A.; Awrejcewicz, J.; Alkashif, M.A.; Mohamed, M.S. 2D and 3D Visualization for the Static Bifurcations and Nonlinear Oscillations of a Self-Excited System with Time-Delayed Controller. Symmetry 2022, 14, 621. [Google Scholar] [CrossRef]
- Saeed, N.A.; Moatimid, G.M.; Elsabaa, F.M.; Ellabban, Y.Y.; Elagan, S.K.; Mohamed, M.S. Time-Delayed Non-linear Integral Resonant Controller to Eliminate the Non-linear Oscillations of a Parametrically Excited System. IEEE Access 2021, 9, 74836–74854. [Google Scholar] [CrossRef]
- Saeed, N.A.; Mohamed, M.S.; Elagan, S.K.; Awrejcewicz, J. Integral Resonant Controller to Suppress the Non-linear Oscillations of a Two-Degree-of-Freedom Rotor Active Magnetic Bearing System. Processes 2022, 10, 271. [Google Scholar] [CrossRef]
- Nayfeh, A.H.; Mook, D.T. Non-Linear Oscillations; Wiley: New York, NY, USA, 1995. [Google Scholar]
- Nayfeh, A.H. Resolving Controversies in the Application of the Method of Multiple Scales and the Generalized Method of Averaging. Non-Linear Dyn. 2005, 40, 61–102. [Google Scholar] [CrossRef]
- De la Luz Sosa, J.; Olvera-Trejo, D.; Urbikain, G.; Martinez-Romero, O.; Elías-Zúñiga, A.; Lacalle, L.N.L.d. Uncharted Stable Peninsula for Multivariable Milling Tools by High-Order Homotopy Perturbation Method. Appl. Sci. 2020, 10, 7869. [Google Scholar] [CrossRef]
- Puma-Araujo, S.D.; Olvera-Trejo, D.; Martínez-Romero, O.; Urbikain, G.; Elías-Zúñiga, A.; López de Lacalle, L.N. Semi-Active Magnetorheological Damper Device for Chatter Mitigation during Milling of Thin-Floor Components. Appl. Sci. 2020, 10, 5313. [Google Scholar] [CrossRef]
- Urbikain, G.; Olvera, D.; López de Lacalle, L.N.; Beranoagirre, A.; Elías-Zuñiga, A. Prediction Methods and Experimental Techniques for Chatter Avoidance in Turning Systems: A Review. Appl. Sci. 2019, 9, 4718. [Google Scholar] [CrossRef] [Green Version]
- Urbikain, G.; Olvera-Trejo, D.; López de Lacalle, L.N.; Elías-Zúñiga, A. Spindle speed variation technique in turning operations: Modeling and real implementation. J. Sound Vib. 2016, 383, 384–396. [Google Scholar] [CrossRef]
- Urbikain, G.; Olvera-Trejo, D.; López de Lacalle, L.N.; Elías-Zúñiga, A. Stability and vibrational behaviour in turning processes with low rotational speeds. Int. J. Adv. Manuf. Technol. 2015, 80, 871–885. [Google Scholar] [CrossRef]
- Ishida, Y.; Yamamoto, T. Linear and Non-Linear Rotordynamics: A Modern Treatment with Applications, 2nd ed.; Wiley-VCH Verlag GmbH & Co. KGaA: New York, NY, USA, 2012. [Google Scholar] [CrossRef]
- Schweitzer, G.; Maslen, E.H. Magnetic Bearings: Theory, Design, and Application to Rotating Machinery; Springer: Berlin/Heidelberg, Germany, 2009. [Google Scholar] [CrossRef]
- Slotine, J.-J.E.; Li, W. Applied Non-Linear Control; Prentice Hall: Englewood Cliffs, NJ, USA, 1991. [Google Scholar]
- Yang, W.Y.; Cao, W.; Chung, T.; Morris, J. Applied Numerical Methods Using Matlab; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2005. [Google Scholar]
















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Saeed, N.A.; Awrejcewicz, J.; Mousa, A.A.A.; Mohamed, M.S. ALIPPF-Controller to Stabilize the Unstable Motion and Eliminate the Non-Linear Oscillations of the Rotor Electro-Magnetic Suspension System. Appl. Sci. 2022, 12, 3902. https://doi.org/10.3390/app12083902
Saeed NA, Awrejcewicz J, Mousa AAA, Mohamed MS. ALIPPF-Controller to Stabilize the Unstable Motion and Eliminate the Non-Linear Oscillations of the Rotor Electro-Magnetic Suspension System. Applied Sciences. 2022; 12(8):3902. https://doi.org/10.3390/app12083902
Chicago/Turabian StyleSaeed, Nasser A., Jan Awrejcewicz, Abd Allah A. Mousa, and Mohamed S. Mohamed. 2022. "ALIPPF-Controller to Stabilize the Unstable Motion and Eliminate the Non-Linear Oscillations of the Rotor Electro-Magnetic Suspension System" Applied Sciences 12, no. 8: 3902. https://doi.org/10.3390/app12083902
APA StyleSaeed, N. A., Awrejcewicz, J., Mousa, A. A. A., & Mohamed, M. S. (2022). ALIPPF-Controller to Stabilize the Unstable Motion and Eliminate the Non-Linear Oscillations of the Rotor Electro-Magnetic Suspension System. Applied Sciences, 12(8), 3902. https://doi.org/10.3390/app12083902