Our aim is to explore the existence of an association between the change in flock size (as an independent variable) and each of the performance measures (as dependent variables).
Figure 5.
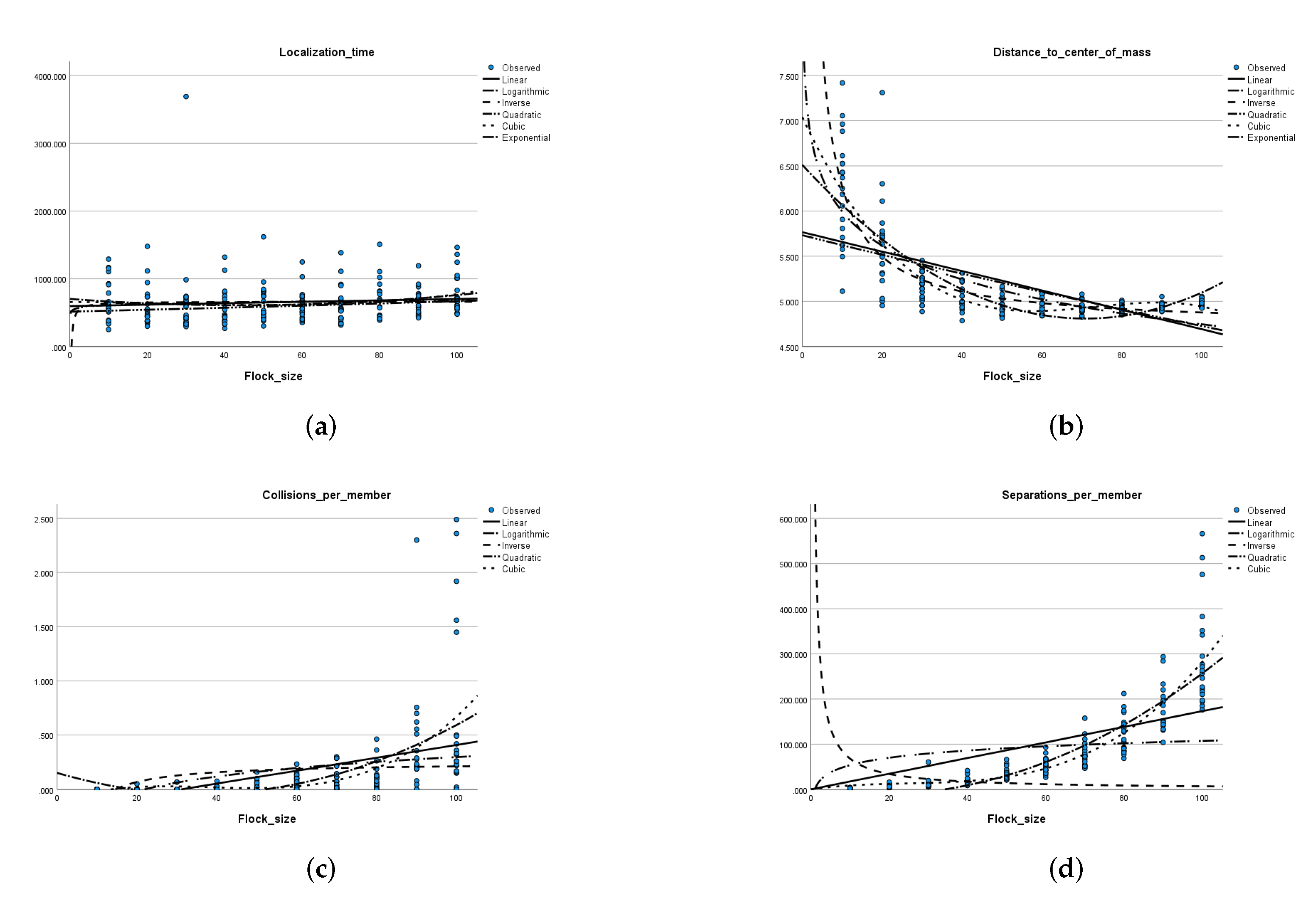
Relationship between the flock size and each of the performance metrics in an environment without obstacles. (a) Flock size versus the goal localization time. (b) Flock size versus the distance to the center of mass. (c) Flock size versus the average number of collisions per member. (d) Flock size versus the average number of applied separation rules per member. (e) Flock size versus the average number of applied alignment rules per member. (f) Flock size versus the average number of applied cohesion rules per member. (g) Flock size versus the average time of task completion. (h) Flock size versus the average speed matching time. (i) Flock size versus the average goal localization window.
Figure 6.
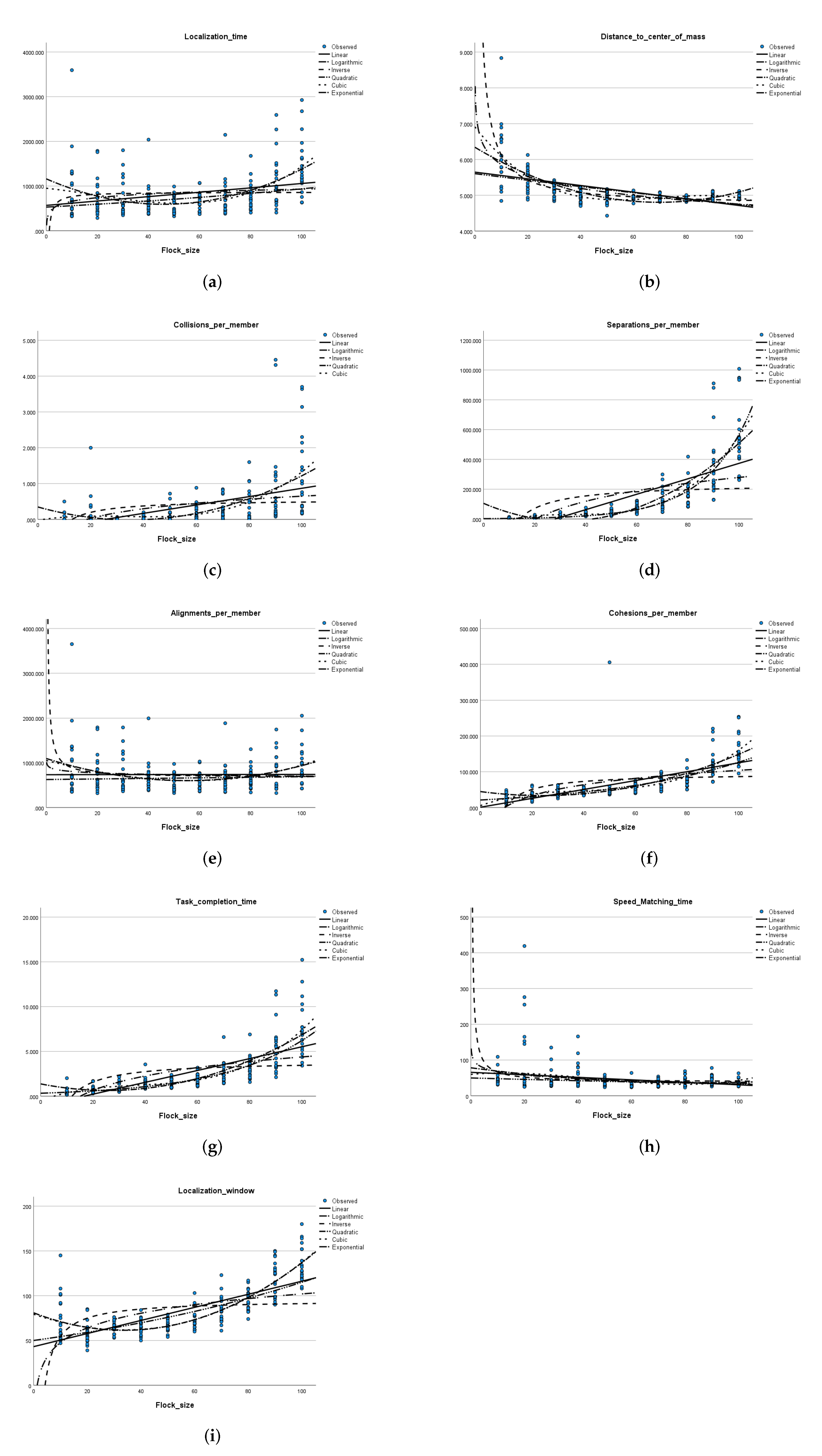
Relationship between the flock size and each of the performance metrics in an environment with obstacles. (a) Flock size versus the goal localization time. (b) Flock size versus the distance to the center of mass. (c) Flock size versus the average number of collisions per member. (d) Flock size
versus the average number of applied separation rules per member. (e) Flock size versus the average
number of applied alignment rules per member. (f) Flock size versus the average number of applied
cohesion rules per member. (g) Flock size versus the average time of task completion. (h) Flock size
versus the average speed matching time. (i) Flock size versus the average goal localization window.
3.2.1. Experimental Results in an Environment without Obstacles
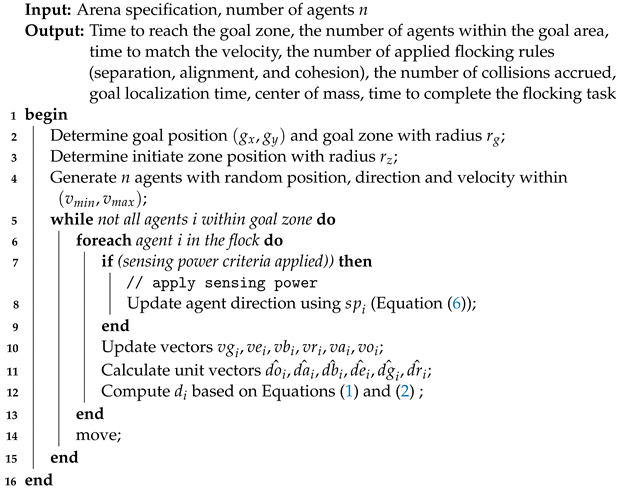
First, we simulated the flocking behavior of
agents in steps of 10, in an environment without obstacles. In all experiments, the flock completed the flocking task successfully by reaching the goal zone area. Recorded simulation outputs (performance metrics) for each flock size, averaged over twenty runs of each experiment, are shown in
Table 3. The relationship is also illustrated in
Figure 5. Each sub-figure shows the data results over all experiments for the number of agents (at the
x-axis) versus the respective performance metric (at the
y-axis) as points distributed on a plane. Moreover, the best-fit curves for each of the nine flocking performance measures against the flock size, using six functions (linear, inverse, logarithmic, quadratic, cubic, and exponential) are shown. The detailed model summary and parameter estimates for the curve fitting obtained are found in
Appendix B.
Localization time:
Table 3 shows that the average goal zone localization time does not exhibit any monotonic relation along with an increase in the flock size. The distribution of data points in the scatter plot shown in
Figure 5a supports this observation.
Figure 5a also shows curve estimates for each of the six functions (linear, inverse, logarithmic, quadratic, cubic, and exponential) relating the flock size to the goal localization time. The
p-value obtained in each of these models was larger than
(
Appendix B); thus, the null hypothesis cannot be rejected, meaning that there exists no association between the changes in flock size and shifts in goal localization time. An exception is the model associated with the exponential function, in which the
p-value detected was
; however, the associated
value indicates that the only
of the variation in the localization time is explained by the flock size.
Distance to center of mass: The average distance to center of mass values tend to decrease along with the increase in the flock size (
Table 3 and
Figure 5b). The flocking behavior is exhibited here, where a larger flock size enables more members to be contained in a flocking zone, allowing the average distance to the center of mass to be reduced.
Figure 5b also shows curve estimates for each of the six functions relating the flock size to the distance to center of mass. The
p-value obtained for each of these models was less than
, which means that the sample data provides enough evidence to reject the null hypothesis, and that changes in the flock size are significantly associated with shifts in the distance to center of mass, on the population level. The
value associated with the inverse function for the distance to the center of mass indicates that
of the variation in the distance to center of mass is explained by the flock size, while the
value associated with the cube function was somewhat higher than that, at
.
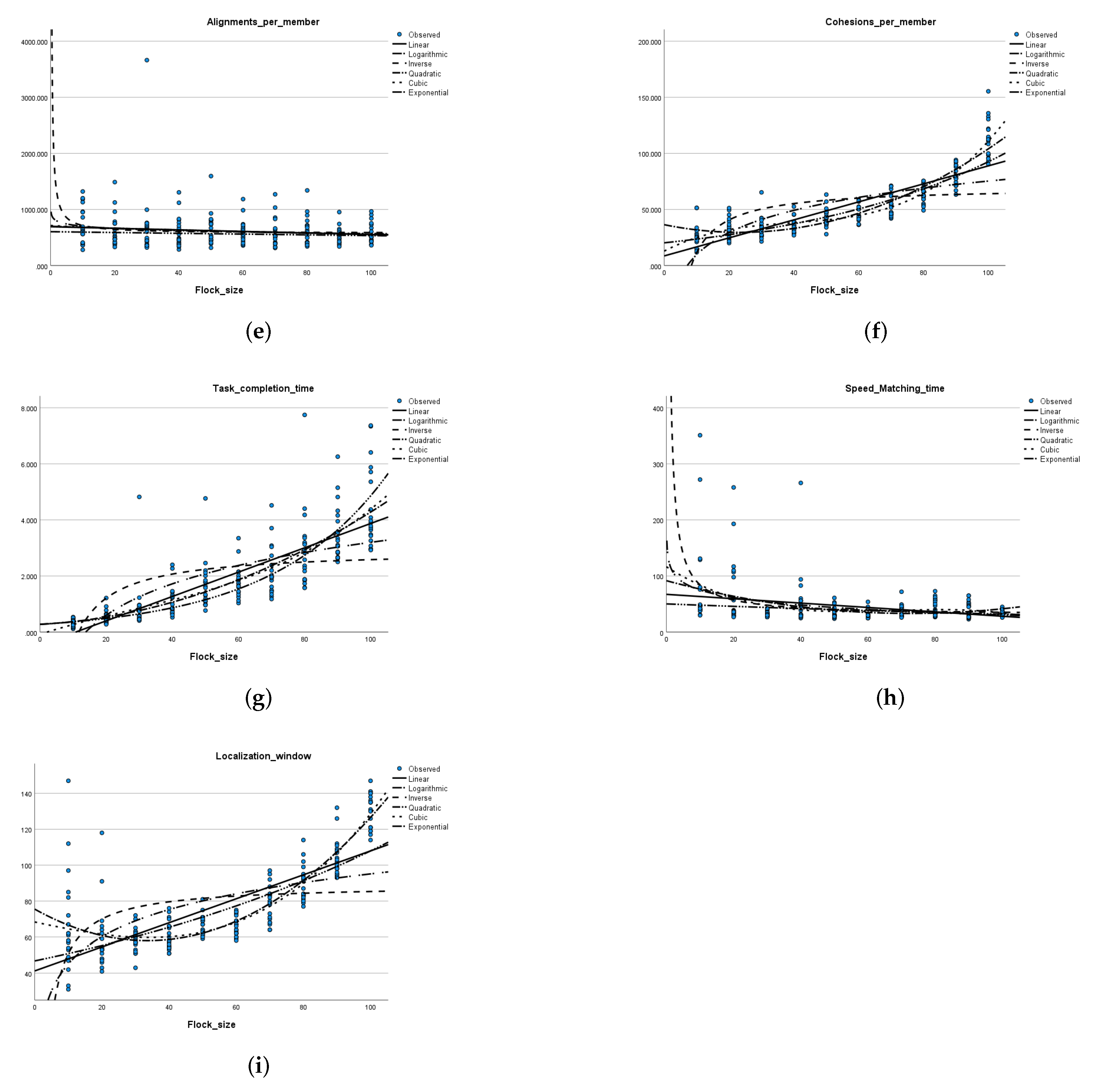
Speed matching time: A similar observation of distance to center of mass can be drawn for the speed matching time measure.
Figure 5h shows curve estimates for each of the six functions relating the flock size to the speed matching time. The
p-value obtained for each of these models was less than
, which means that the sample data provides enough evidence to reject the null hypothesis, and that changes in the flock size are significantly associated with shifts in the speed matching time on the population level. For the speed matching time, the highest
value is that associated with the inverse function and it accounted for only
of the variation in speed matching time due to changes in the flock size.
Collisions per member: The average collisions per member tend to increase along with the increase in the flock size as shown in
Table 3. The number of collision avoidance steps needed for a larger flock size is larger than the number needed for a smaller flock size. The scatter plot in
Figure 5c also shows that the standard deviation is small (2.5 collisions). The
p-value obtained in each of the six curve estimation models was less than
, which means that the sample data provides enough evidence to reject the null hypothesis, and that changes in the flock size are significantly associated with shifts in the number of collisions on the population level. However, the
values associated with these models are a bit lower than those obtained for the models of the distance to center of mass variable. The
value associated with the quadratic function indicates that
of the variation in the number of collisions is explained by the flock size, while the
value associated with the cube function was closely higher than that at
.
Separations per member:
Table 3 shows a steady increase in the average number of applied separation steps along with the increase in the flock size. The scatter plot in
Figure 5d) clearly supports that. The shape of the scatter is close to a quadratic or a cubic function. In fact, the
p-value obtained in each of the six curve estimation models was less than
, which means that the sample data provides enough evidence to reject the null hypothesis, and that changes in flock size are significantly associated with shifts in the number of applied separation steps on the population level. The highest
value is that associated with the cubic function (
), closely followed by the
value associated with the quadratic function at
.
Alignments per member: Similar to goal localization time,
Table 3 shows that the average number of alignment steps does not exhibit any monotonic relation along with an increase in the flock size. The distribution of data points in the scatter plot shown in
Figure 5e supports this observation. It appears that the average number of alignment steps per member is not affected by the flock size. The scatter of data points appears in every flock size.
Figure 5e also shows curve estimates for each of the six functions relating the flock size to the average number of alignment steps per member. The
p-value obtained in each of these models was larger than
(
Appendix B); thus, the null hypothesis cannot be rejected, meaning that there exists no association between changes in flock size and shifts in the number of alignment steps.
Cohesions per member: The average cohesion steps per member monotonically increases with the increase in the flock size as shown in
Table 3, which is confirmed by the scatter plot in
Figure 5f. The distribution of data points in the scatter plot shown in
Figure 5f shows that the standard deviation of number of cohesion steps is similar for each flock size; however, the average number of cohesion steps increases as the flock size increases. The number of cohesion steps needed to keep a larger flock size in cohesion is larger than the number needed for a smaller flock size. The
p-value obtained in each of the six curve estimation models was less than
, which means that the sample data provides enough evidence to reject the null hypothesis, and that changes in flock size are significantly associated with shifts in the number of cohesion steps on the population level. The highest
value is that associated with the cubic function and explains
of the variation in the number of cohesion steps due to shifts in the flock size.
Task completion time and goal localization window: The time required to complete the task in minutes (
Figure 5g), as well as the goal localization window (
Figure 5i) all increased along with an increase in flock size, as supported by the average value readings from
Table 3. The
p-value obtained in each of the six curve estimation models for both of these metrics was less than
, which means that the sample data provides enough evidence to reject the null hypothesis and that changes in flock size are strongly associated with shifts in each of these two performance measures. For the time required to complete the task measure, the highest
value was associated with the exponential function and accounted for
of the variation in time required to complete the flocking task due to changes in the flock size. As for the goal localization window, the highest
value was associated with the cubic function and indicates that
of the variation in the goal localization window is explained by changes in the flock size, while the
value associated with the quadratic function closely follows at
. These results are in line with the shape of the points on the scatter plot in
Figure 5i.
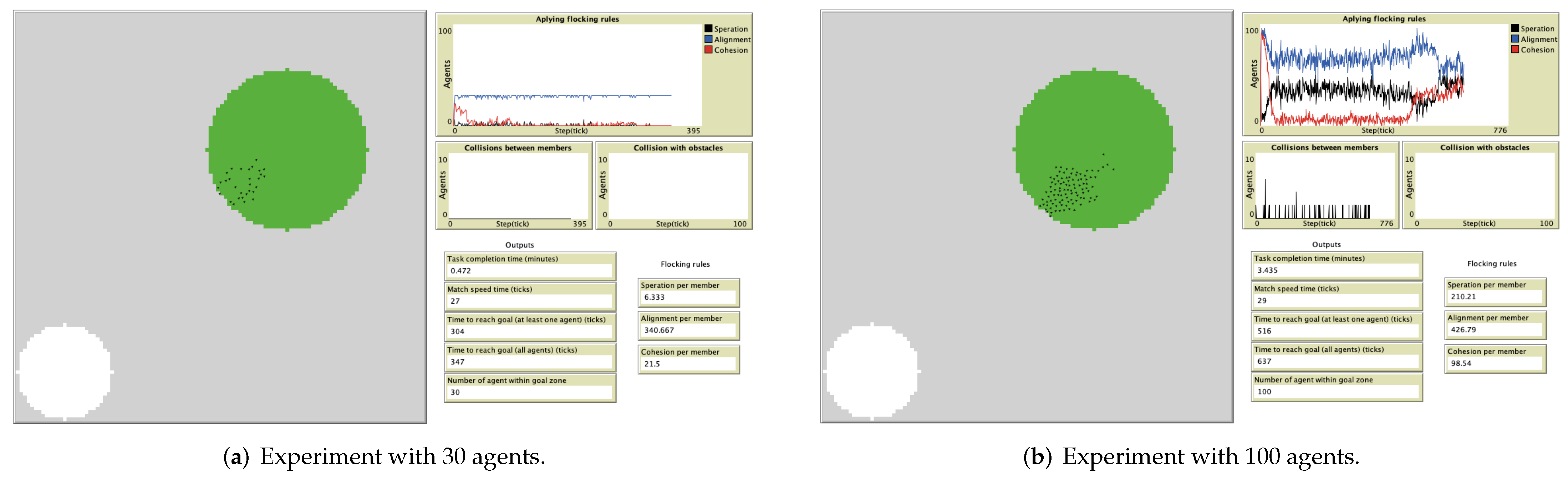
As previously mentioned, the flocking behavior became stable when the majority of the flock members applied the alignment rule, rather than the attraction or separation rules. Based on the obtained results, the larger the flock size, the larger the number of repulsion and cohesion steps applied. The simulation outputs of two randomly selected experiments with flock sizes of 30 and 100 are shown in
Appendix C.
3.2.2. Experimental Results in an Environment with Obstacles
Next, experiments simulating the flocking behavior of
agents in steps of 10, in an environment with obstacles are conducted. In all experiments, the flock was able to complete the flocking task successfully by reaching the goal zone area. Recorded simulation outputs (performance metrics) for each flock size, averaged over twenty runs of each experiment, are shown in
Table 4. The relationships are also illustrated in
Figure 6. Each sub-figure shows the data results over all experiments for the number of agents (on the
x-axis) versus the respective performance metric (on the
y-axis) as points distributed on a plane. Moreover, the best-fit curves for each of the nine flocking performance measures against the flock size, using six functions (linear, inverse, logarithmic, quadratic, cubic, and exponential) are shown. The detailed model summary and parameter estimates for the curve fitting obtained are found in
Appendix B.
From
Table 4 and similar to the observation drawn from results of the experiments without obstacles, no relationship can be easily drawn between the flock size and the goal localization time. The scatter plot in (
Figure 6a) shows that the lowest goal localization time was obtained in experiments with 50 agents. Considering the significance of the obtained function curves, interestingly, the
p-value associated with each of the different functions was smaller than
except that for the inverse function. The highest
value was that for the cubic model (
), closely followed by that for the quadratic model at
.
The average distance to center of mass tends to decrease along with an increase in flock size as shown in
Table 4. The pattern observed is similar to that illustrated by the results in experiments without obstacles. The
p-value associated with all the curve estimation functions in (
Figure 6b) supports rejecting the null hypothesis. The
value associated with the inverse function was
, while that associated with the cube function was found to be slightly higher at
.
Furthermore, similar to the observations drawn from the experiments without obstacles,
Table 4 displays a monotonic increase in the average value obtained for each of the performance measures separations, cohesion, and task completion time along with the increase in flock size. The table also shows a tendency of increase in the number of collisions and localization window with the increase in flock size. The
p-value obtained for each of the curve estimates in each of (
Figure 6c,d,f,g,i) provides strong evidence that the null hypothesis should be rejected. The
value associated with the cubic function in (
Figure 6c) was
closely followed by that for the quadratic function (
). Similarly, The
value associated with the cubic function and the quadratic function in (
Figure 6i) was, equally,
. The highest
value for the models in each of (
Figure 6d,f,g) was that associated with the exponential function, having considerable values of
,
, and
, respectively.
In contrast, considering the number of alignment steps, the
p-value obtained for each of the curve estimation values in
Figure 6e does not provide sufficient evidence to reject the null hypothesis, except for the cubic and quadratic models. However, the
value associated with these models can only explain the variation in no more than
of the number of alignment steps due to the change in flock size.
Finally, the average speed matching time values reported in
Table 4 do not show a clear relationship with the flock size. However, the
p-value for all the curve estimation functions in
Figure 6h for this measure show strong evidence to reject the null hypothesis. Notably, the highest
value obtained from these functions can explain no more than
of the change in the speed matching time due to the change in flock size.
The environment had five obstacles, which were added manually to ensure they were distributed along the route to the goal, with random sizes, as illustrated in
Figure 7. We applied the same methodology as in the simulation with no obstacles—3 randomly selected experiments of 100, 50, and 30 agents simulation output are shown in
Figure 7a–c, respectively. In the upper right corner in these figures, we represent the different flock behaviors: blue curve for number of applied alignment rules, black curve for the number of applied separation rules, and red curve for the number of applied attraction rules. A zoomed-out view of these parameters along with the number of collisions is made clear in
Figure 7d. The increase in flock size causes unstable flocking behavior, whereas the flocking rules plot looks smooth in
Figure 7a,b. In addition, there is a noticeable increase in the application of the separation and attraction rules (black and red lines, respectively) when the flock size is 100, as shown in
Figure 7c. Moreover, whenever the flock does not have stable flocking behavior, the collision between its members increases. In addition, sensing the goal in presence of obstacles close to the goal led to a high possibility that the flock members collide with these obstacles, as shown in
Figure 7d.
The flock controller was capable of making the flock split and rejoin to avoid the obstacles, similar to the results reported in [
23].
Figure 8 illustrates examples of the splitting (
Figure 8a) and joining (
Figure 8b) of the flock. This means that the flock was able to split into smaller groups to avoid the obstacle, as long as the obstacle was smaller than the orientation zone’s size.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}