
Time-Varying Topology Formation Reconfiguration Control of the Multi-Agent System Based on the Improved Hungarian Algorithm

Abstract
:1. Introduction
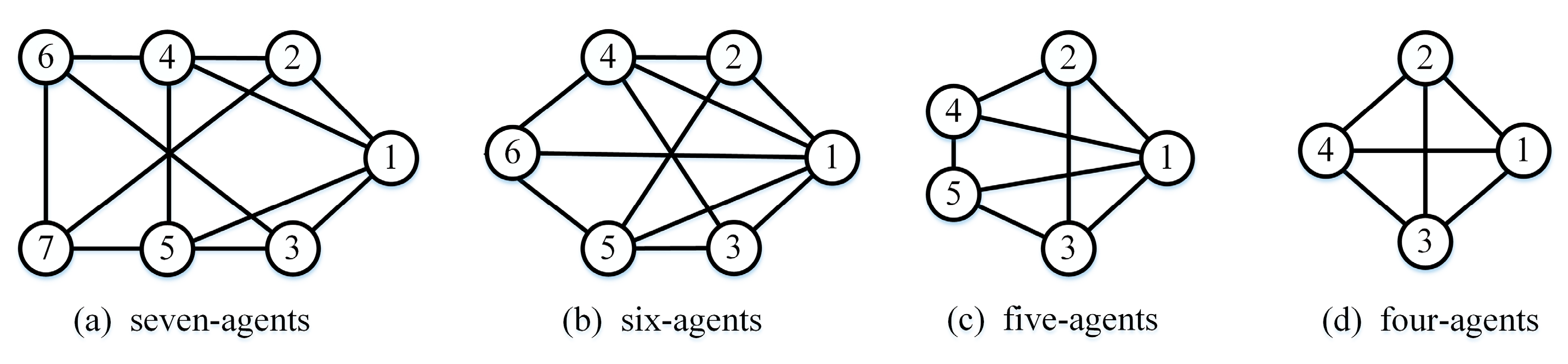
- A graphic library is innovatively established, and four possible multi-agent formation configurations are designed. After the failure of a single agent, topology images can be searched and dispatched in the graphic library according to the number of remaining agents, which can help the multi-agent system quickly establish a new configuration.
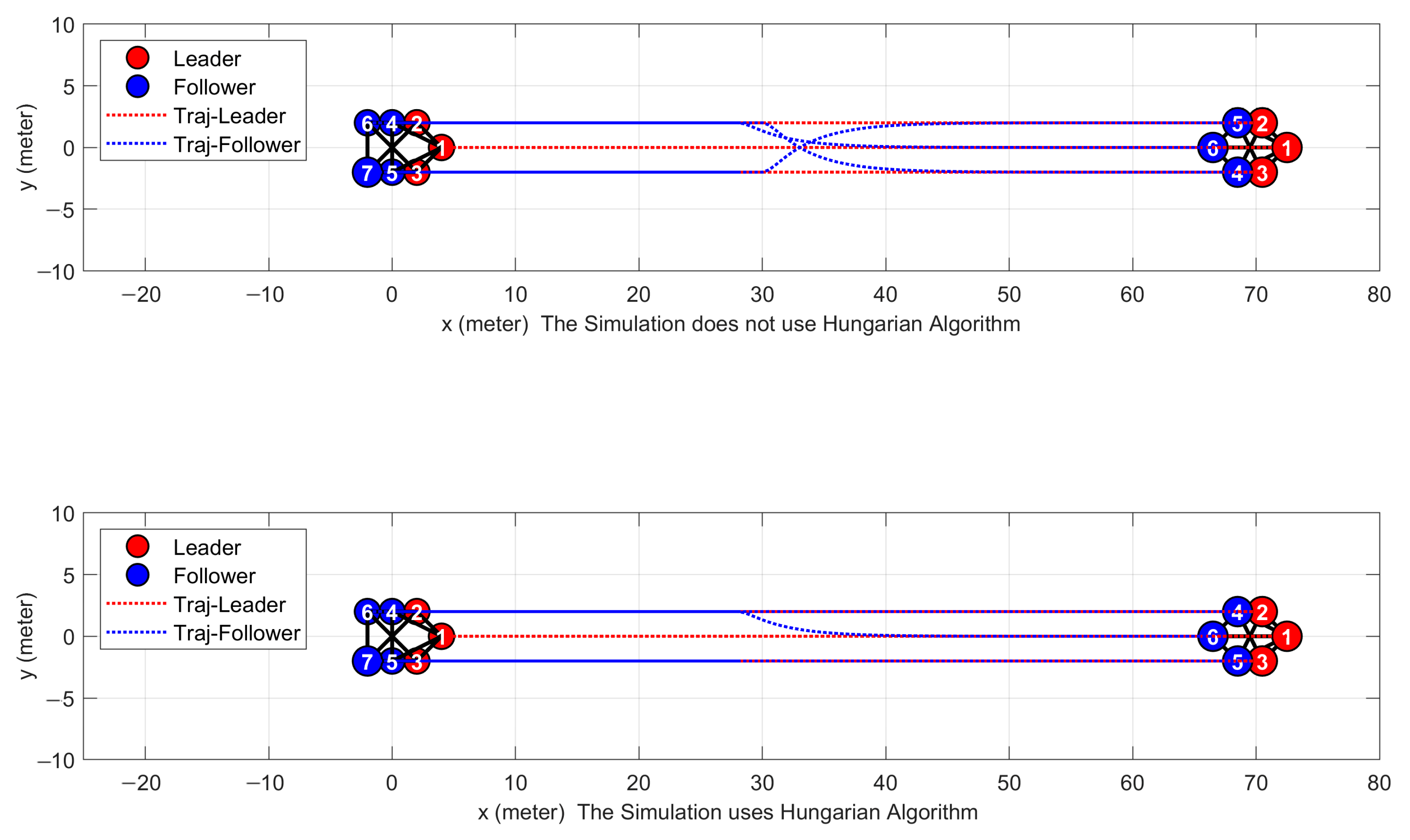
- The improved Hungarian algorithm is adopted to plan the target points so that each agent in the system can obtain specific target points in the formation using the ideal of ranking and a gradient weighting factor in the auction algorithm to further save time in formation reconfiguration.
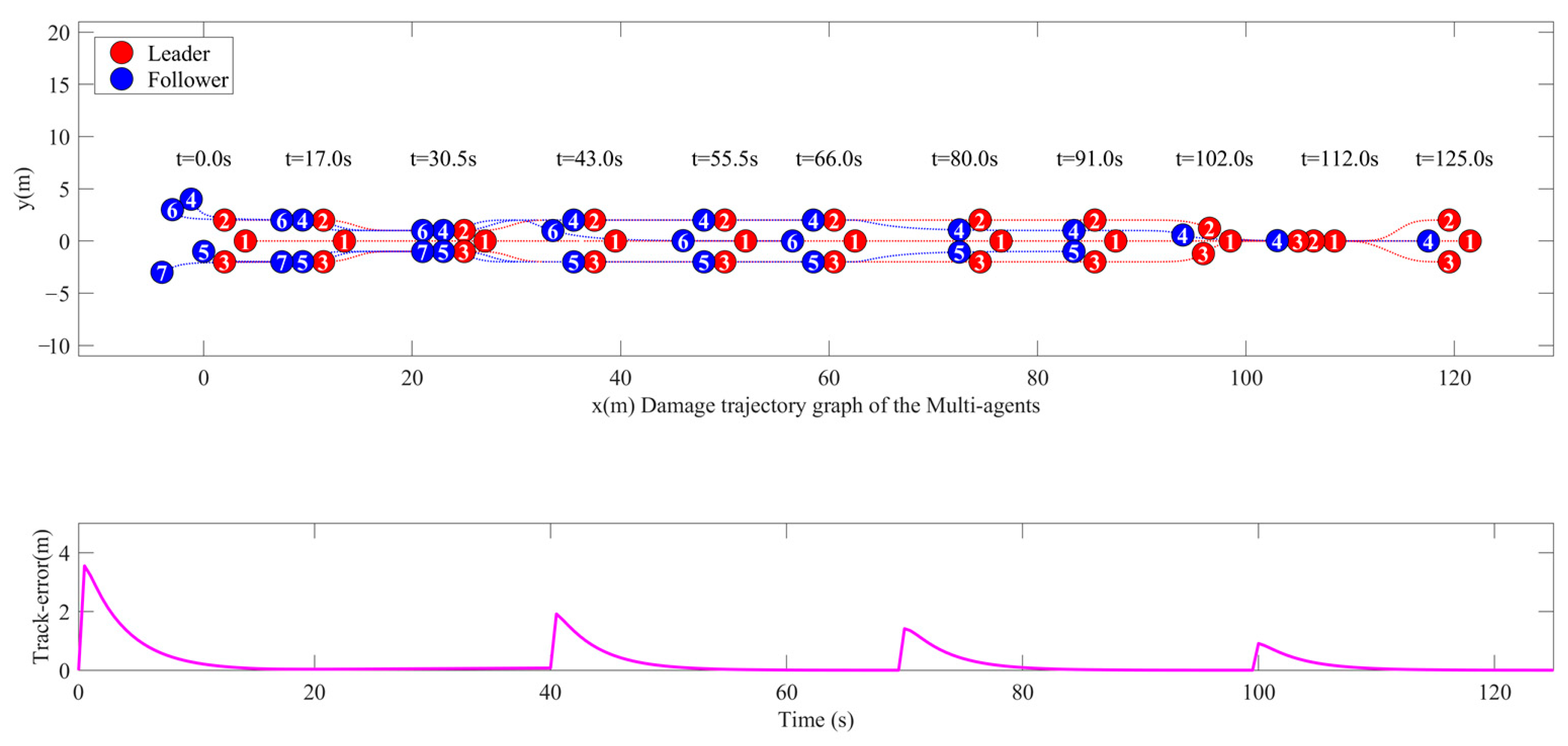
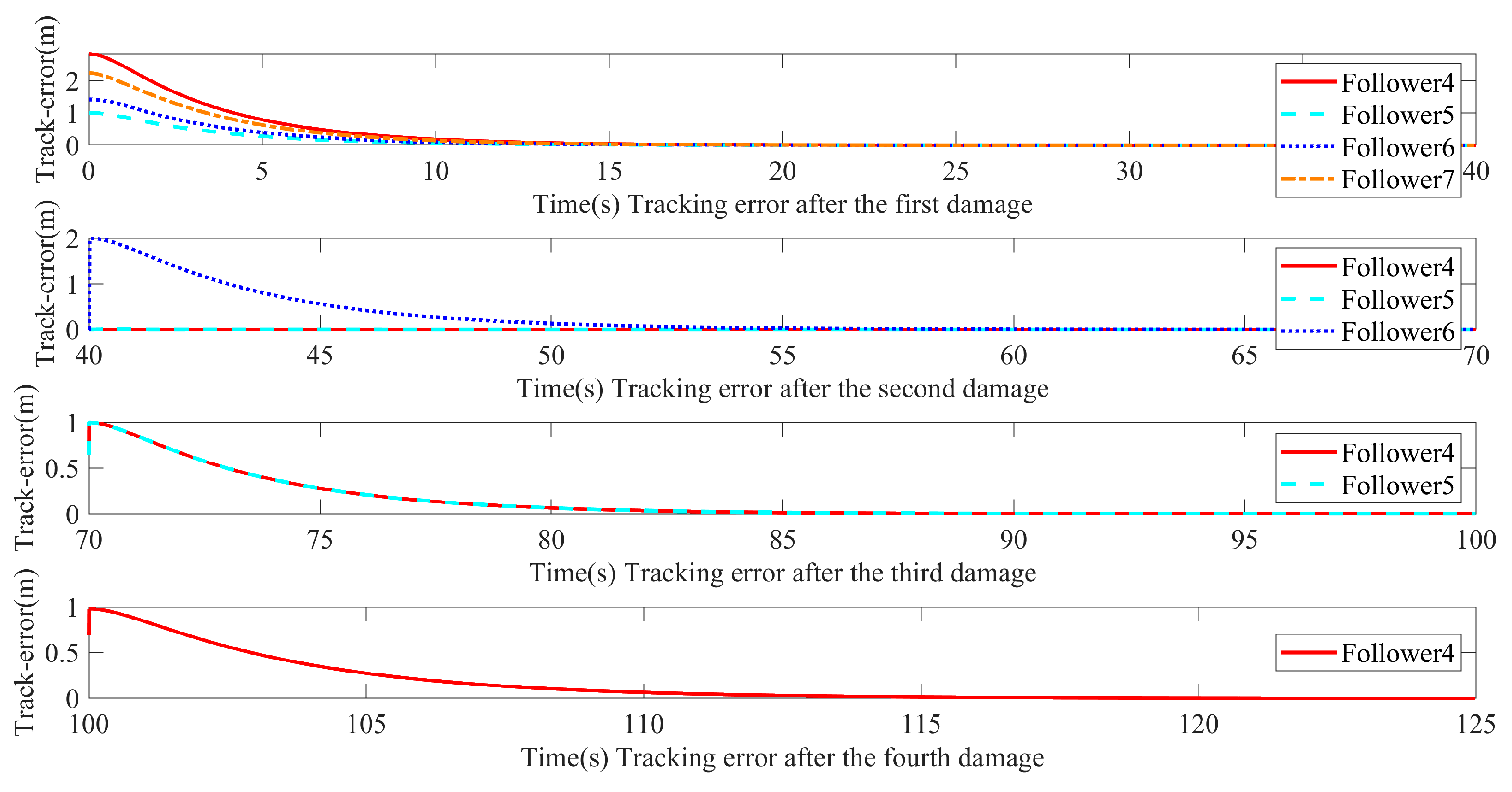
- In each topological cycle, a time-varying topological formation control law based on consistency theory is established. The control law can quickly reduce the tracking error to form a nominal configuration, and the stability of the formation reconfiguration system in a single time interval is proved by using the Lyapunov function.
2. Theoretical Basis of Time-Varying Target Formation
3. Design of Time-Varying Target Formation Control for Multi-Agent Systems Based on the Improved Hungarian Algorithm
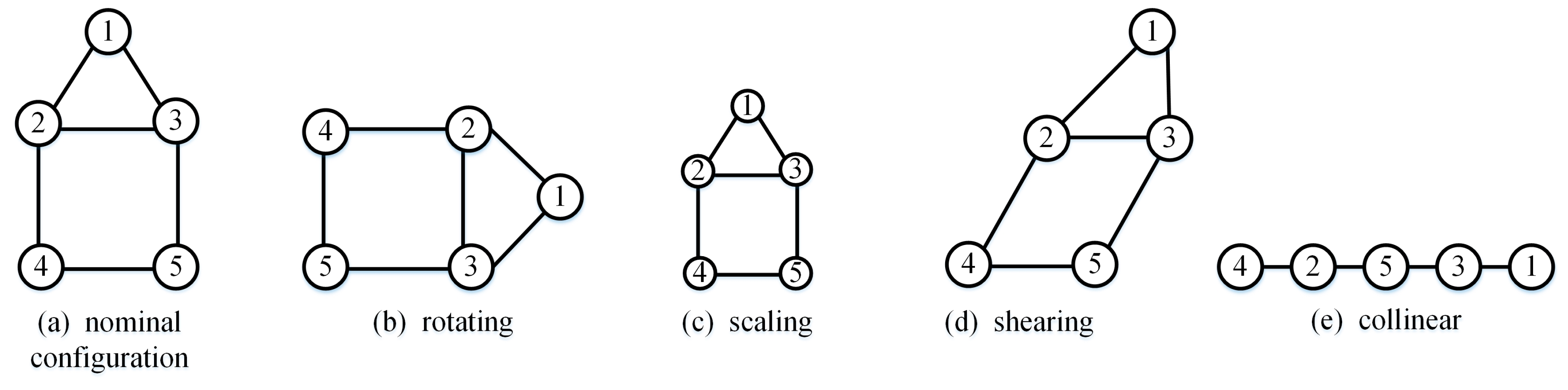
3.1. Construction of Time-Varying Topology Formation Graphics Library
3.2. Improved Hungarian Algorithm Design
- Before each calculation, use conditional statements to judge, and check the number of agents in the system, and feedback the number of agents in the system;
- Determine whether the agent is disabled in the current system; if failed, skip to step (3); if not, skip to step (6);
- According to the number of smart bodies, find and call the corresponding number of formation configurations in the graphics library; use the formations of the graphics library to generate new adjacency matrix and stress matrix, and renumber the smart bodies in order;
- Set the distance matrix of the agent. The improved Hungarian algorithm traverses the distance between the agent and each target point and calculates the cost matrix. Find the minimum value of each row/column of the distance matrix, and subtract the minimum value of all the elements in this row/column at the same time to get a new distance matrix. The matrix is constantly reduced by rows and columns until the 0 element appears in each row and column. We sort the elements of each row and column, and calculate the weighting factors of each order. Then we adjust the sorting results of the elements in each row and column, according to the sorting value assigned above. The non-zero minimum value is subtracted from the unassigned rows and the column element ordering result is adjusted. The same calculation needs to be done for unassigned columns. The algorithm counts the comprehensive gradient weighted sum of elements in each row and column.
- 5.
- Among them, are the incremental sorting results of the row and column elements respectively. For the unallocated row and column elements, the weighted sum of the comprehensive gradients is sorted from large to small, and the row or column with the largest comprehensive gradient is selected for trial allocation. To reduce the order of the distance matrix, the algorithm deletes the rows and columns allocated above. If the number of rows of the distance matrix is less than or equal to the number of columns, the weighted sum of the comprehensive gradients of the unallocated column elements is sorted from large to small, and the column with the largest comprehensive gradient is selected for trial allocation. By deleting the rows and columns of the above allocation, the order of distance matrix is reduced. Repeat the above process to determine whether the end condition is met and obtain the allocation result.
- 6.
- According to the method of the minimum objective function, the target points to be reconstructed is reprogrammed, and the desired position to be achieved is assigned;
- 7.
- Based on the above numbering method, use the leader-follower control law based on the consensus algorithm to control the system to achieve the formation and reconstruction of the overall goal.
- Step 1.
- Initialize the algorithm and related parameters;
- Step 2.
- The number of rows and columns in the distance matrix was compared. If the number of rows and columns are equal, go to the next step. If the number of rows is larger, go to step5, otherwise go to step7.
- Step 3.
- We sort the comprehensive weighted values of each row and column from large to small, so that the subscript of the row (column) with the largest comprehensive weighted value is;
- Step 4.
- If the row (column) with the smallest element in the row (column) k of the distance matrix is ik, jk respectively, then assign the row ik to column jk and go to step9.
- Step 5.
- Sorting the combined weighted values of the rows from the largest to the smallest, and let the subscript of the row with the largest combined weighted value be k;
- Step 6.
- If the smallest element in row k of the distance matrix is located is jk, and assign row k to column jk and go to step9.
- Step 7.
- Sorting the combined weighted values of the columns from the smallest to the largest, and let the subscript of the column with the largest combined weighted value be;
- Step 8.
- If the smallest element in the column k of the distance matrix is in the column ik, then assign the row k to the column ik and go to step9.
- Step 9.
- End the target trial assignment.
3.3. Multi-Agent System Control Law Design Based on Graph Theory and Consistency Algorithm
3.4. Stability Analysis of Time-Varying Topology Formation
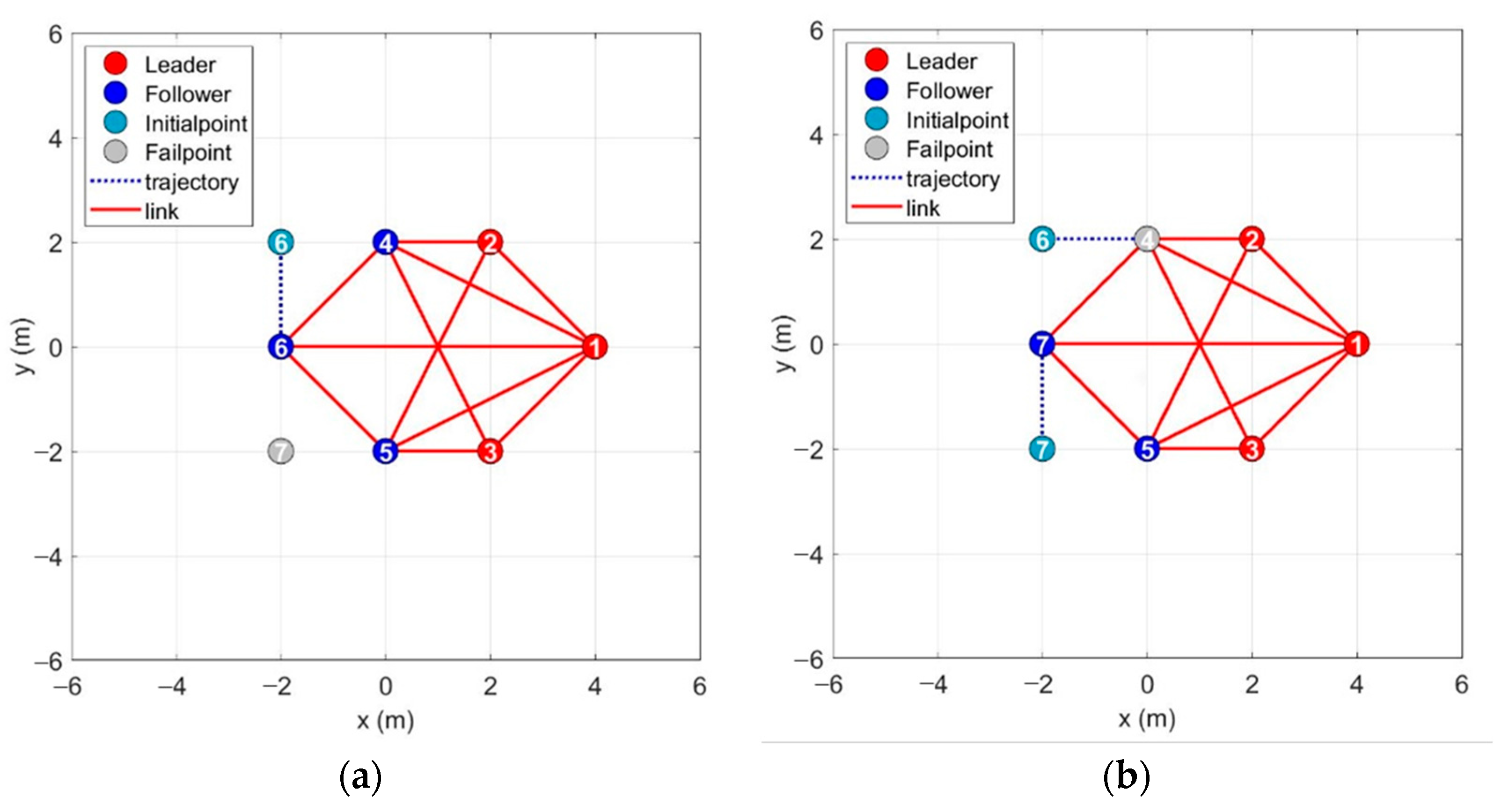
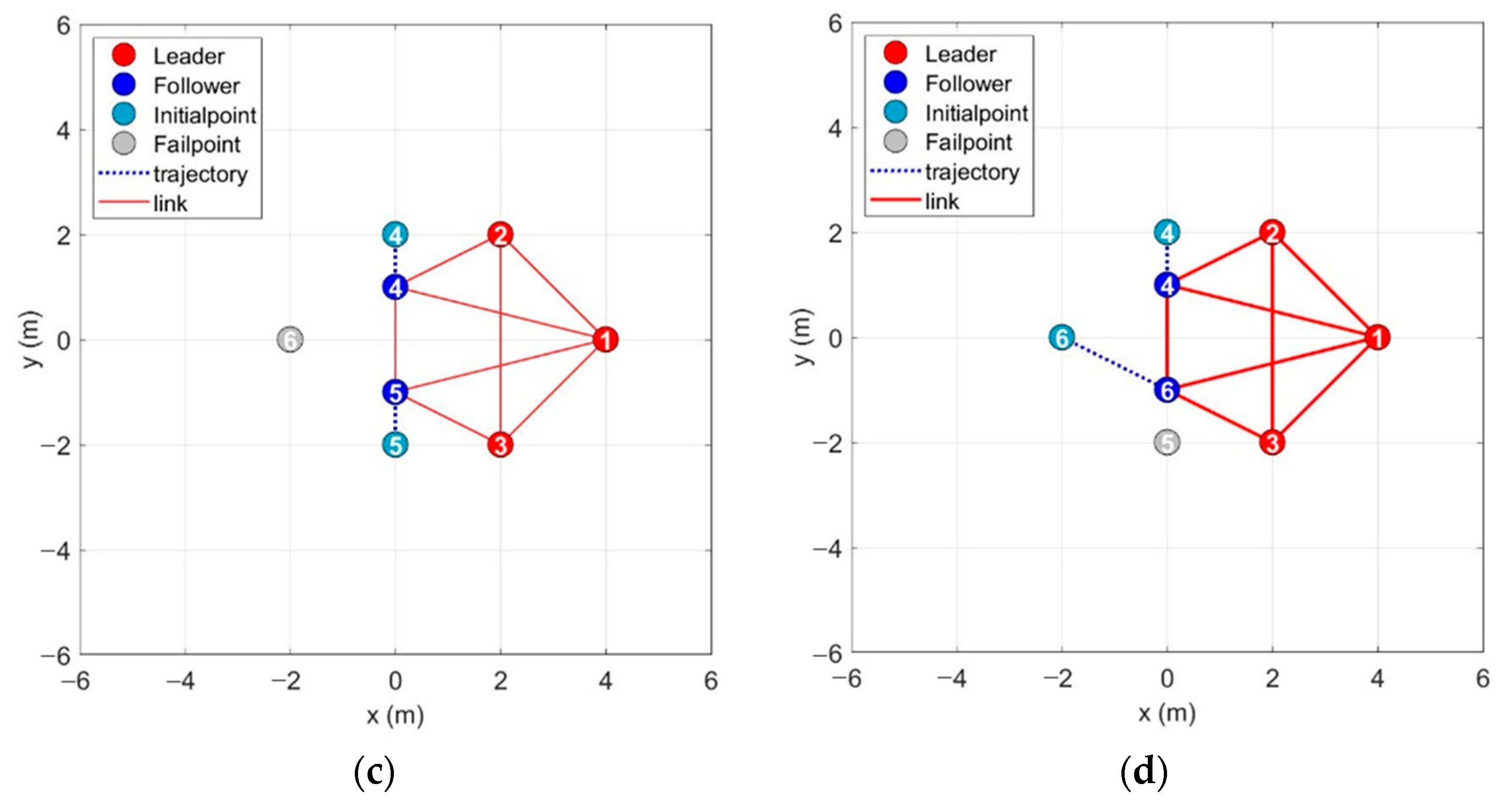
4. Simulation Analysis of Switching Topology Formation
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AUV | Autonomous underwater vehicle |
| UAV | Unmanned Aerial Vehicle |
References
- Tian, L.; Zhao, Q.; Dong, X. Time-varying Output Group Formation Traking for Heterogeneous Multi-agent Systems. Acta Aeronaut. Astronaut. Sin. 2020, 41, 323727. [Google Scholar]
- Chen, Q.; Wang, Y.; Jin, Y.; Wang, T.; Nie, X.; Yan, T. A Survey of An Intelligent Multi-Agent Formation Control. Appl. Sci. 2023, 13, 5934. [Google Scholar] [CrossRef]
- Wang, W.; Zhang, W.; Hu, Z. PI Strategy Based Time-Varying Formation Control of Multiple Heterogeneous Agents. Electron. Optics Control 2021, 28, 11–15+30. [Google Scholar]
- Zhen, Q.; Wan, L.; Li, Y. Time-varying Formation Control and Disturbance Rejection for UAV-UGV Heterogeneous Swarm System. Acta Aeronaut. Astronaut. Sin. 2020, 41, 723767. [Google Scholar]
- Thuy, N.; Bui, D.; Phung, M. Deployment of UAVs for Optimal Multihop Ad-hoc Networks Using Particle Swarm Optimization and Behavior-based Control. In Proceedings of the International Conference on Control, Automation and Information Sciences (ICCAIS), Hanoi, Vietnam, 21–24 November 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 304–309. [Google Scholar]
- Zhen, Q.; Wan, L.; Li, Y. Formation Control of a Multi-AUVs System Based on Virtual Structure and Artificial Potential Field on SE(3). Ocean Eng. 2022, 253, 111148.1–111148.12. [Google Scholar] [CrossRef]
- Wang, J.; Gu, W.; Dou, L. Leader-Follower Formation Control for Multiple UAVs with Trajectory Tracking Design. Acta Aeronaut. Astronaut. Sin. 2020, 41, 88–98. [Google Scholar]
- Riahifard, A.; Rostami, S.M.H.; Wang, J.; Kim, H.-J. Adaptive Leader-Follower Formation Control of Under-Actuated Surface Vessels with Model Uncertainties and Input Constraints. Appl. Sci. 2019, 9, 3901. [Google Scholar] [CrossRef]
- Pan, W.; Jiang, D.; Pang, Y.; Li, Y. A Multi-AUV Formation Algorithm Combining Artificial Potential Field and Virtual Structure. Acta Armamentarii 2017, 38, 326–334. [Google Scholar]
- Lee, G.; Chwa, D. Decentralized Behavior-based Formation Control of Multiple Robots Considering Obstacle Avoidance. Intell. Serv. Robot. 2018, 11, 127–138. [Google Scholar] [CrossRef]
- Shi, P.; Yu, J.; Liu, Y. Robust Time-varying Output Formation Tracking for Heterogeneous Multi-agent Systems with Adaptive Event-triggered Mechanism. J. Frankl. Inst. 2022, 359, 5842–5864. [Google Scholar] [CrossRef]
- Qi, H.; Zhang, M.; Yao, H. Formation Maintenance and Reconfiguration Algorithm Design for Small UAVs. Ordnance Ind. Autom. 2021, 40, 32–35. [Google Scholar]
- Guo, X. Consensus Analysis and Synthesis of Multi-Agent with Several Communication Topologies. Ph.D. Thesis, Beijing University of Technology, Beijing, China, 2017. [Google Scholar]
- Tian, L.; Hua, Y.; Dong, X.; Lu, J. Distributed Time-Varying Group Formation Tracking for Multiagent Systems With Switching Interaction Topologies via Adaptive Control Protocols. IEEE Trans. Ind. Inf. 2022, 18, 8422–8433. [Google Scholar] [CrossRef]
- Li, J.; Yu, J.; Hua, Y.; Dong, X.; Zhang, R. Resilient practical time-varying formation tracking for multiagent systems with a leader of unknown input. In Proceedings of the 2022 17th International Conference on Control, Automation, Robotics and Vision (ICARCV), Singapore, 11–13 December 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 739–745. [Google Scholar]
- Han, Z.; Wang, L.; Lin, Z.; Zheng, R. Formation Control with Size Scaling Via a Complex Laplacian-Based Approach. IEEE Trans. Cybern. 2016, 46, 2348–2359. [Google Scholar] [CrossRef] [PubMed]
- Wu, G.; Hammers, J. Leader-Following Consensus of Nonlinear Discrete-Time Multi-Agent Systems with Limited Bandwidth and Switching Topologies. Am. J. Clin. Pathol. 2019, 152, S76. [Google Scholar] [CrossRef]
- Xu, Y.; Luo, D.; You, Y.; Duan, H. Affine Transformation Based Formation Maneuvering for Discrete-Time Directed Networked Systems. Sci. China Technol. Sci. 2020, 63, 73–85. [Google Scholar] [CrossRef]
- Zhao, S. Affine Formation Maneuver Control of Multiagent Systems. IEEE Trans. Automat. Contr. 2018, 63, 4140–4155. [Google Scholar] [CrossRef]
- Tan, W.; Huang, N.; Huang, C.; Yu, C.; Zhong, C. Fixed-Time Rigidity-Based 3-D Formation Maneuvering Control with Distributed Finite-Time Velocity Estimators. In Proceedings of the 2019 Chinese Control Conference (CCC), Guangzhou, China, 27–30 July 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 3237–3242. [Google Scholar]
- Yang, Q.; Sun, Z.; Cao, M.; Fang, H.; Chen, J. Construction of Universally Rigid Tensegrity Frameworks and Their Applications in Formation Scaling Control. In Proceedings of the 2017 36th Chinese Control Conference (CCC), Dalian, China, 26–28 July 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 8177–8182. [Google Scholar]
- Gortler, S.J.; Thurston, D.P. Characterizing the Universal Rigidity of Generic Frameworks. Discrete Comput. Geom. 2014, 51, 1017–1036. [Google Scholar] [CrossRef]
- Yang, Q.; Cao, M.; Fang, H.; Chen, J. Constructing Universally Rigid Tensegrity Frameworks with Application in Multiagent Formation Control. IEEE Trans. Automat. Contr. 2019, 64, 381–388. [Google Scholar] [CrossRef]
- Lin, Z.; Wang, L.; Chen, Z.; Fu, M.; Han, Z. Necessary and Sufficient Graphical Conditions for Affine Formation Control. IEEE Trans. Automat. Contr. 2016, 61, 2877–2891. [Google Scholar] [CrossRef]
- Coogan, S.; Arcak, M. Scaling the Size of a Formation Using Relative Position Feedback. Automatica 2012, 48, 2677–2685. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Formation Dimension | Number of Leaders | Total Number of Agents | Maximum Number of Sides | The Actual Number of Sides |
|---|---|---|---|---|
| 2 | 3 | 7 | 15 | 12 |
| 2 | 3 | 6 | 12 | 11 |
| 2 | 3 | 5 | 9 | 8 |
| 2 | 3 | 4 | 6 | 6 |
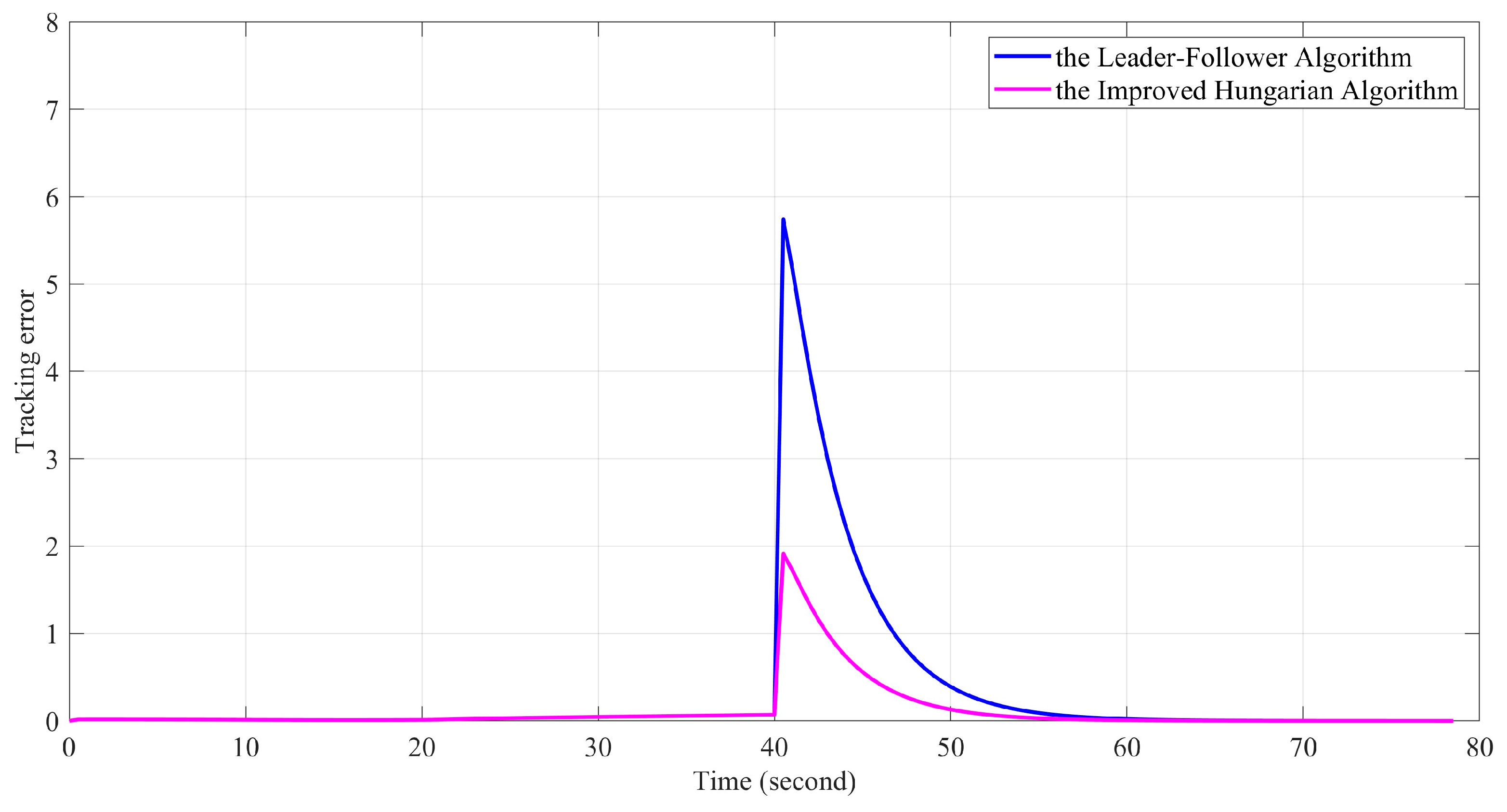
| Different Strategies | Total Path Cost | Steady-State Time | Tracking Error Peak Comparison |
|---|---|---|---|
| Using the Leader-Follower algorithms | 68.15 | 63 s | 5.742 |
| Using the Improved Hungarian Algorithm | 60.09 | 55 s | 1.916 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Chen, M.; Chen, J.; Chen, C.; Yu, H.; Zhang, Y.; Deng, X. Time-Varying Topology Formation Reconfiguration Control of the Multi-Agent System Based on the Improved Hungarian Algorithm. Appl. Sci. 2023, 13, 11581. https://doi.org/10.3390/app132011581
Zhang Y, Chen M, Chen J, Chen C, Yu H, Zhang Y, Deng X. Time-Varying Topology Formation Reconfiguration Control of the Multi-Agent System Based on the Improved Hungarian Algorithm. Applied Sciences. 2023; 13(20):11581. https://doi.org/10.3390/app132011581
Chicago/Turabian StyleZhang, Yingxue, Meng Chen, Jinbao Chen, Chuanzhi Chen, Hongzhi Yu, Yunxiao Zhang, and Xiaokang Deng. 2023. "Time-Varying Topology Formation Reconfiguration Control of the Multi-Agent System Based on the Improved Hungarian Algorithm" Applied Sciences 13, no. 20: 11581. https://doi.org/10.3390/app132011581
APA StyleZhang, Y., Chen, M., Chen, J., Chen, C., Yu, H., Zhang, Y., & Deng, X. (2023). Time-Varying Topology Formation Reconfiguration Control of the Multi-Agent System Based on the Improved Hungarian Algorithm. Applied Sciences, 13(20), 11581. https://doi.org/10.3390/app132011581