
Modified A-Star (A*) Approach to Plan the Motion of a Quadrotor UAV in Three-Dimensional Obstacle-Cluttered Environment

 ,
,  ,
, 
Abstract
:1. Introduction
2. Preliminaries
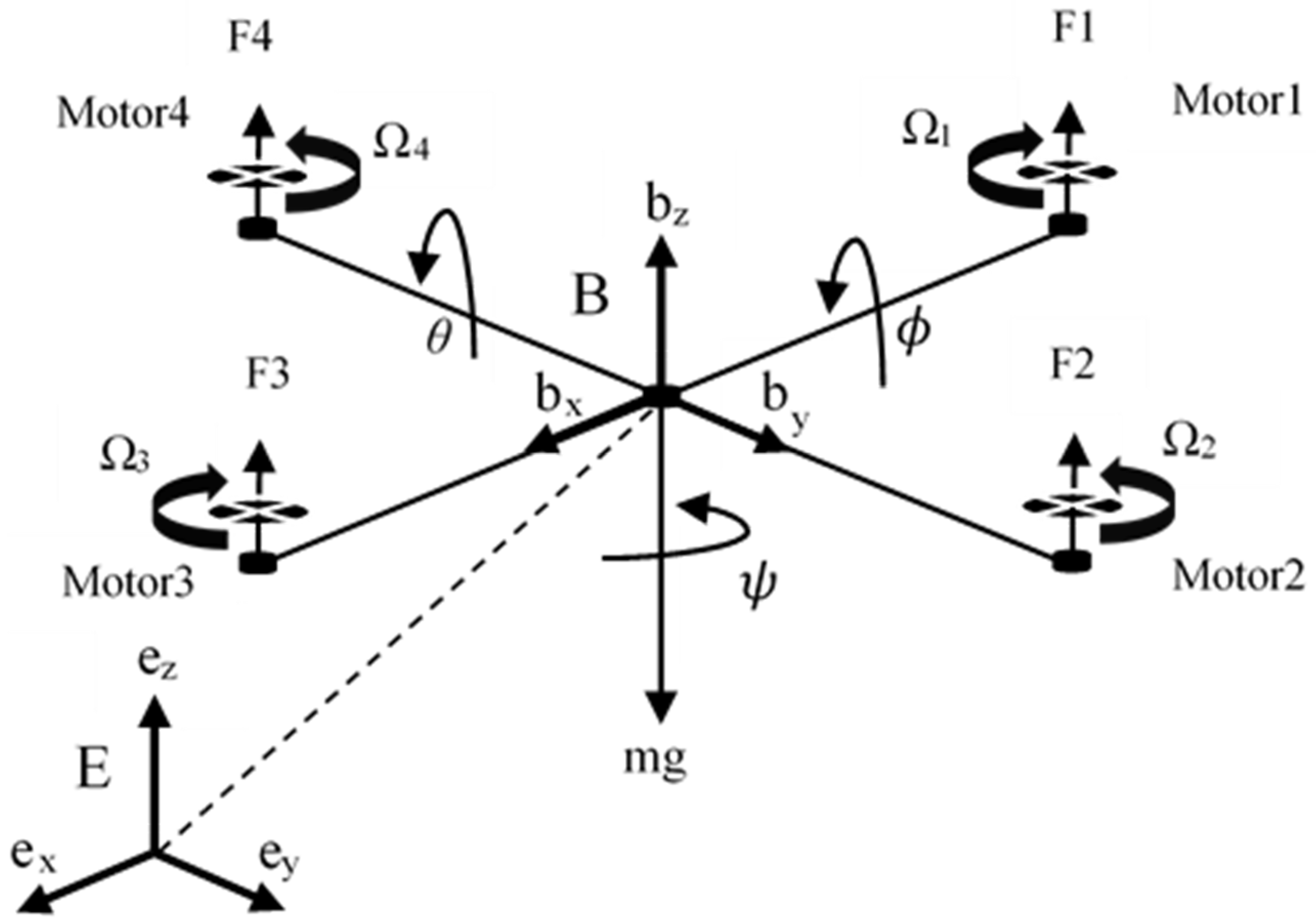
2.1. Modeling
2.2. Controller Design
2.2.1. Inner Loop Controller
2.2.2. Outer Loop Controller
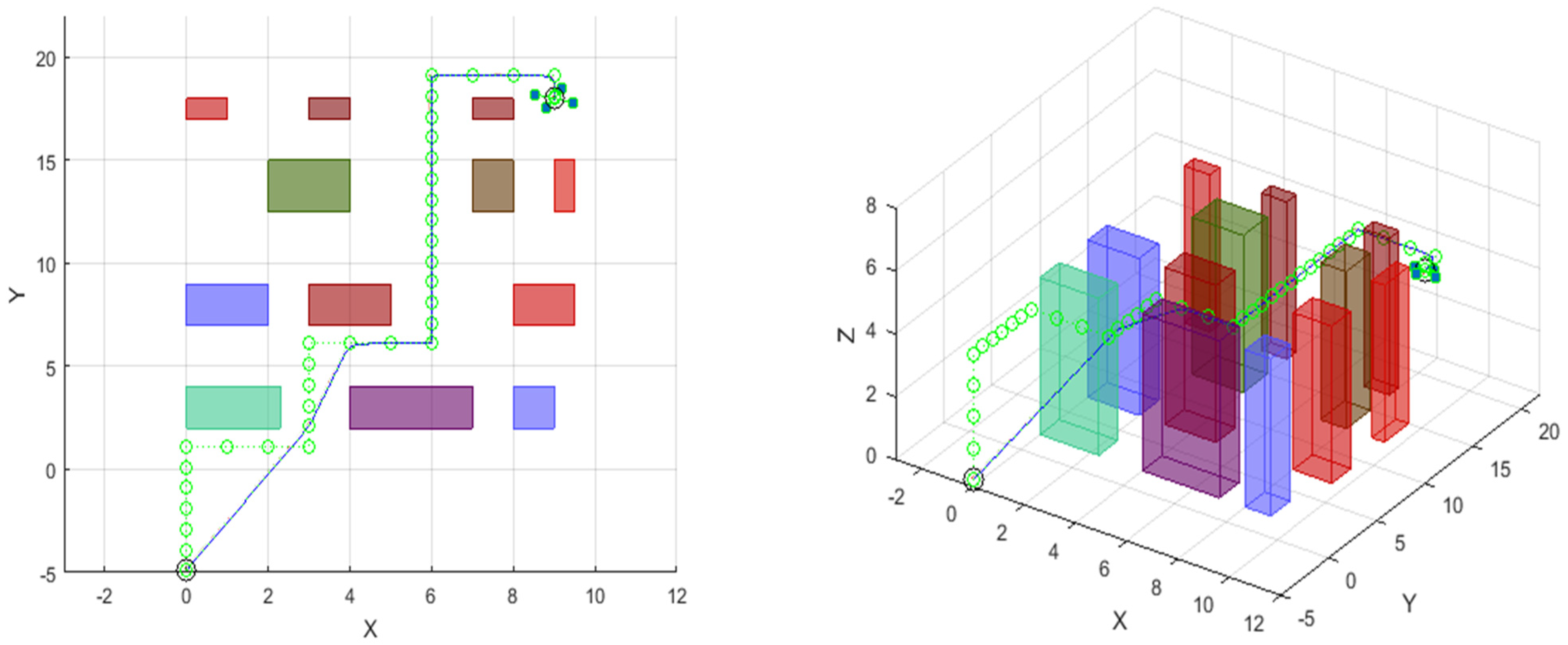
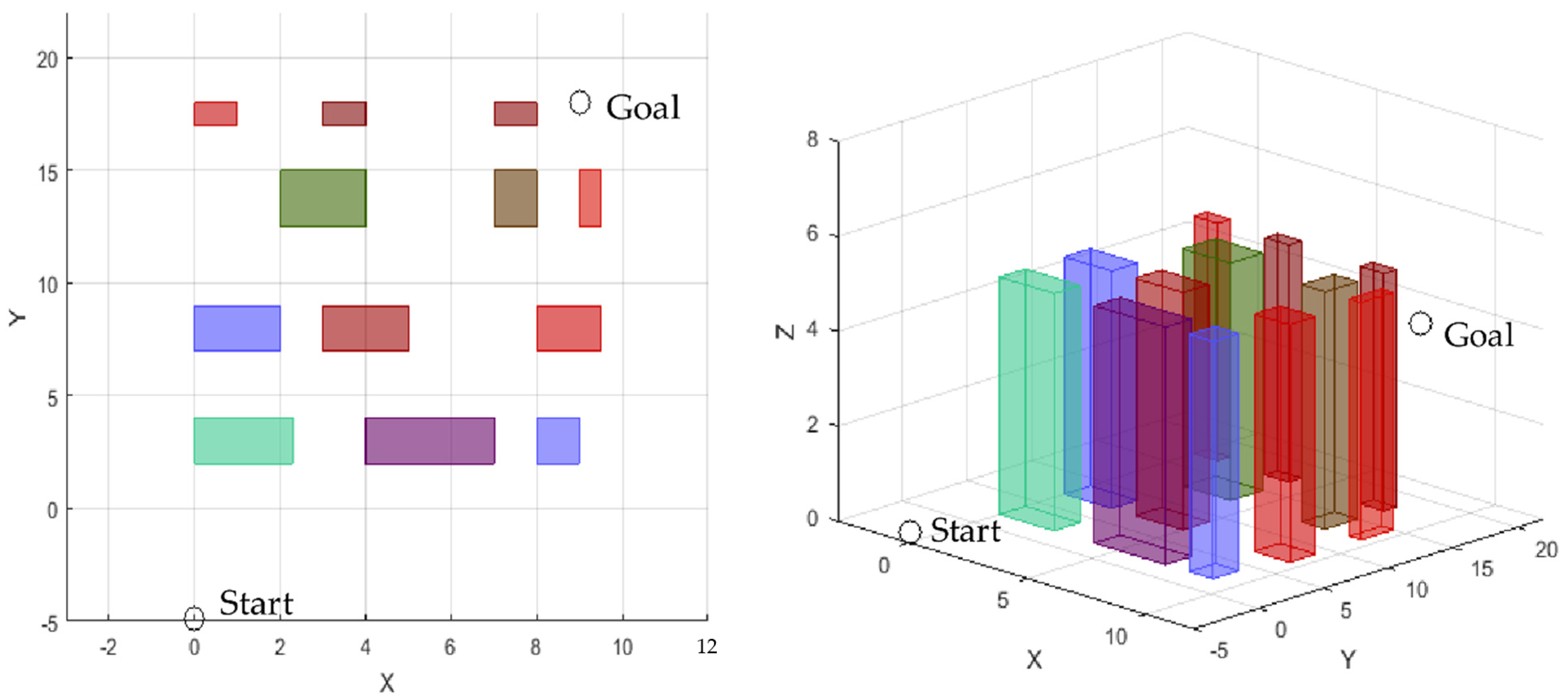
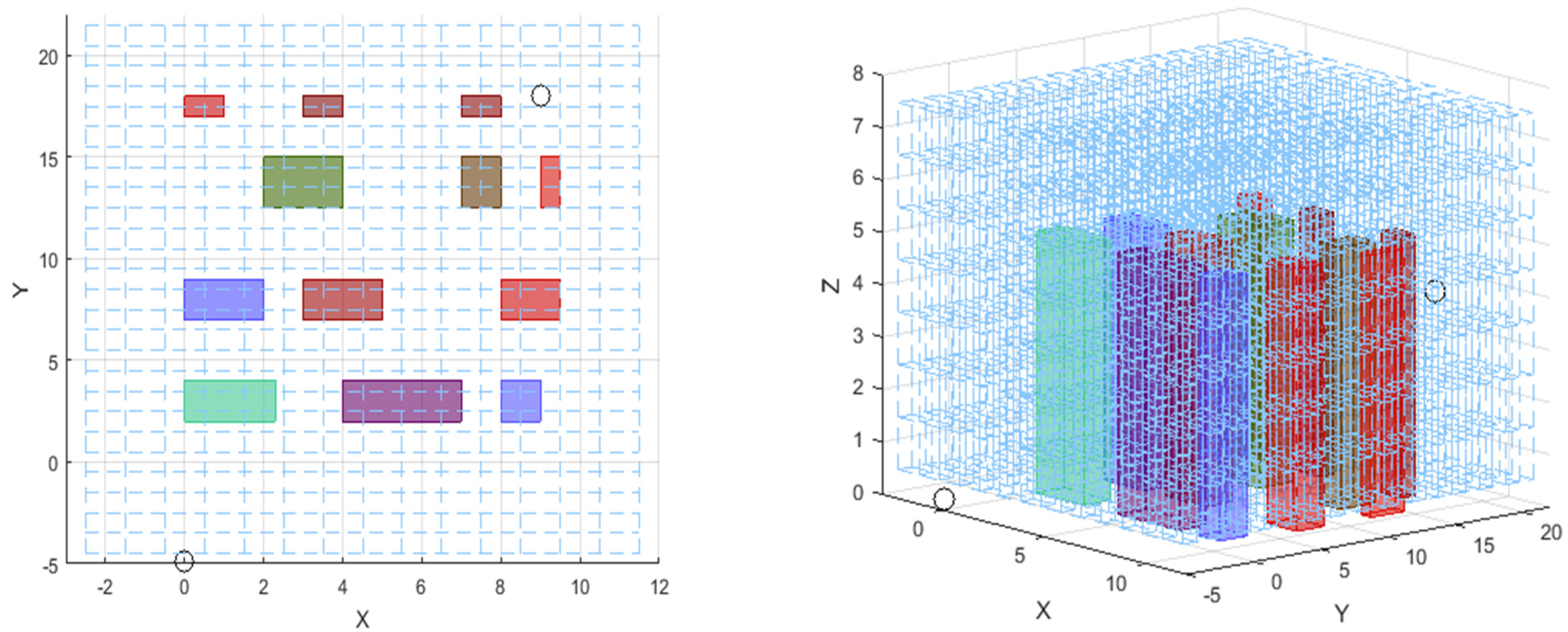
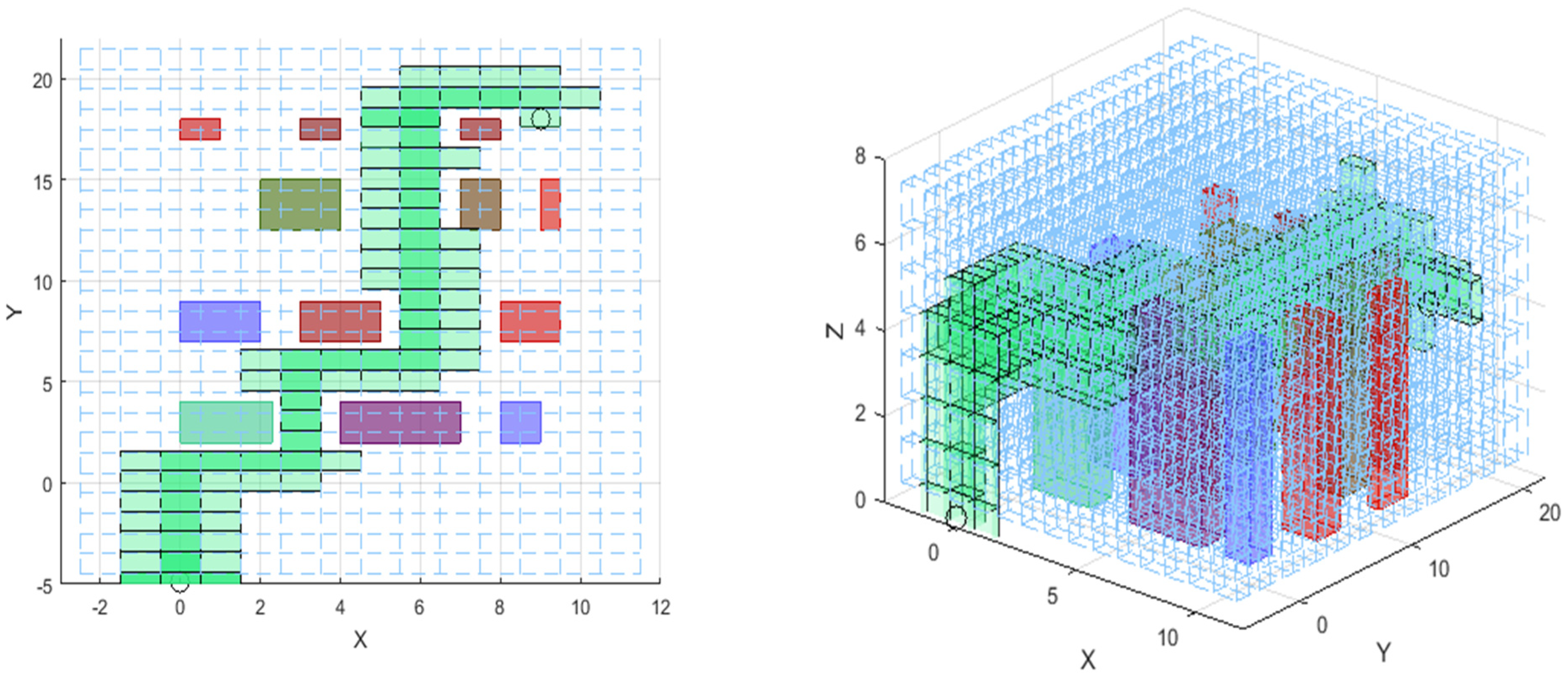
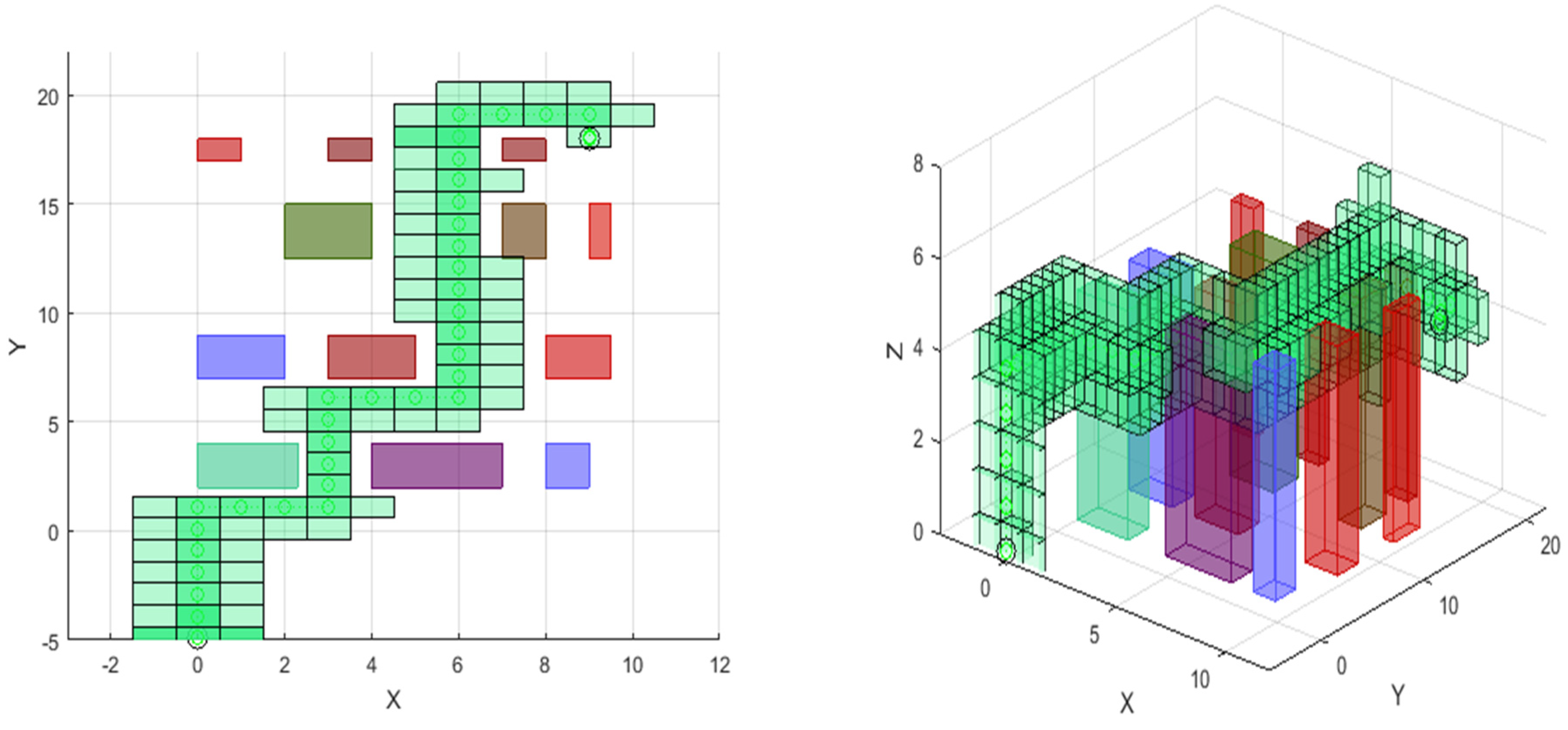
3. Motion Planning
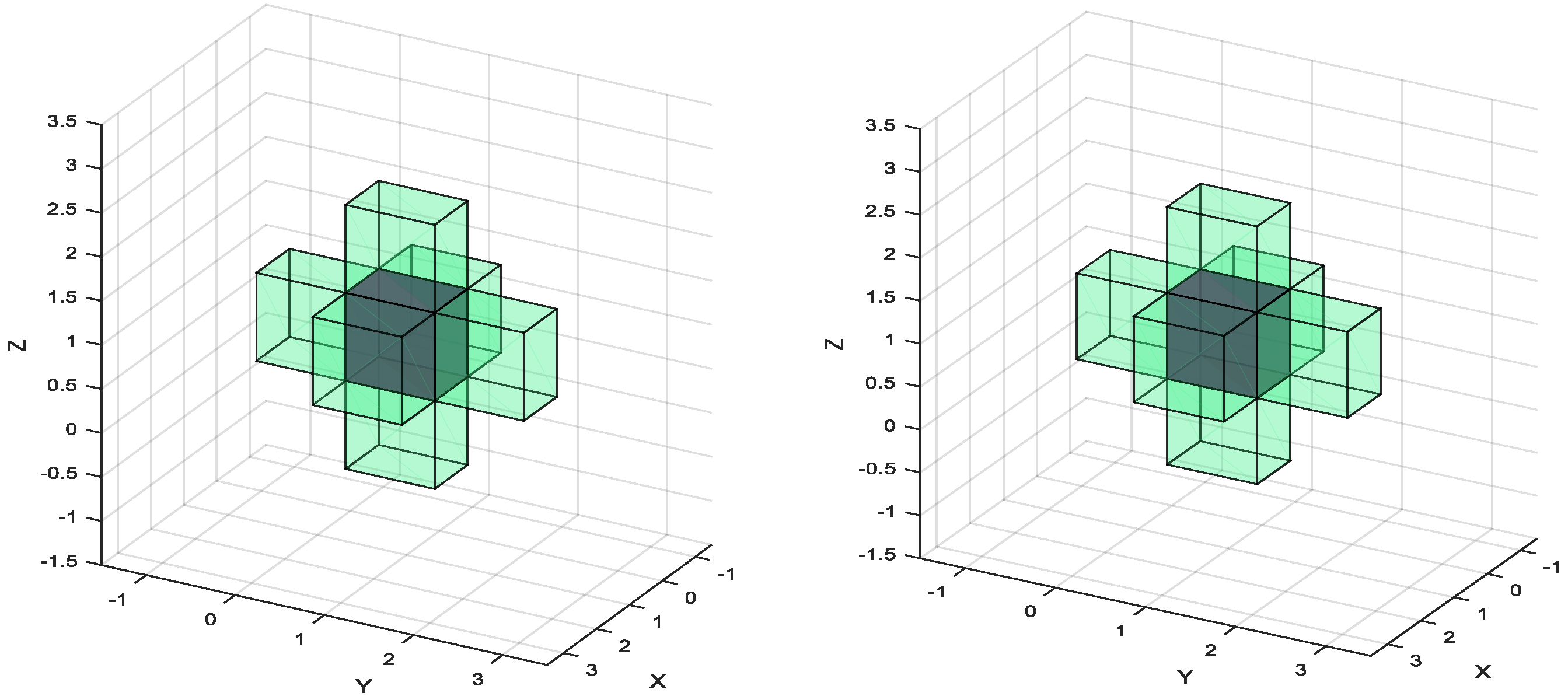
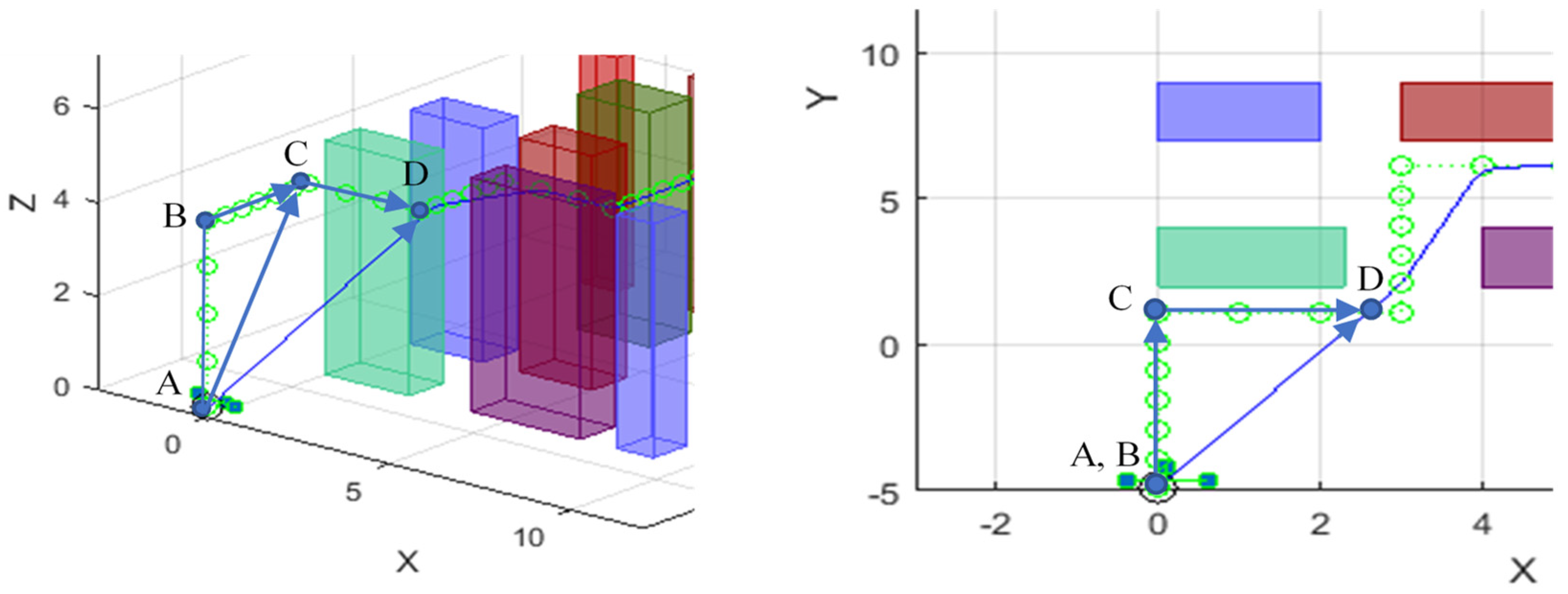
3.1. Three−Dimensional Path Search Using Modified A−Star Approach
| Algorithm 1 A* algorithm for three-dimensional path search (with 6-sided search). |
| 1: Function P(n) = Astar3D(3D_Environment, start, goal) |
| 2: list_open = nodes to be evaluated; %initially only starting node is present |
| 3: list_closed = nodes which have been examined; % initially empty |
| 4: list_open (start_node) = 0; |
| 5: while (list_open =! empty) do |
| 6: search the node with least f in list_open % the value of h(n) is same only for 6 neighbors, here one can plan the strategy for 18-sided search as well. |
| 7: n = node with least value of f; |
| 8: remove n from the list_open |
| 9: search the adj_cells of n % adj_cells infer adjacent cells |
| 10: for (each adj_cell) |
| % for three-dimensional case 6 adjacent cells have been visited in this work, however these can be up to 18 adjacent cells including the cells at the edges of a voxel holding the current vertex. |
| 11: if (adj_cell = goal) then |
| 12: stop the search |
| 13: adj_cell.g = n.g + dis_adj_cell; |
| 14: adj_cell.h = distance between adj_cell and goal; |
| 15: adj_cell.f = Adj_cell.g + Adj_cell.h; |
| 16: else if (node with same position as of adj_cell in list_open) |
| 17: if (node.f < adj_cell.f) |
| 18: skip adj_cell |
| 19: end if |
| 20: else if (node with same position as of adj_cell in list_closed) |
| 21: if (node.f < adj_cell.f) |
| 21: skip adj_cell |
| 22: else |
| 23: add node to list_open |
| 24: end if |
| 25: end if |
| 26: end for loop |
| 27: add n to list_closed |
| 28: end while |
| 29: P(n)= list_closed |
| 30: return P(n) |
| 31: end function |
| Algorithm 2 Collision detection algorithm. |
| 1: input (3D_Environment, current vertex) |
| 2: E = 3D Environment; |
| 3: C(n) = current vertex; |
| 4: E_min = min(E.obstacles); %lower boundary of the obstacles |
| 5: E_max = max(E.obstacles); %upper boundary of the obstacles |
| 6: minEo = E_min – margins – UAV_size; |
| 7: maxEo = E.max + margins + UAV_size; |
| 8: minEb = lower boundary of 3D Environment; |
| 9: maxEb = upper boundary of 3D Environment; |
| 10: if (Cx(n), Cy(n), Cz(n) ≥ minEo && Cx(n), Cy(n), Cz(n) ≤ maxEo) |
| 11: return collision; |
| 12: else if (Cx(n), Cy(n), Cz(n) < minEb) |
| 13: return collision; |
| 14: else if (Cx(n), Cy(n), Cz(n) > maxEb) |
| 15: return collision; |
| 16: else |
| 17: return collision_free; |
| 18: End if |
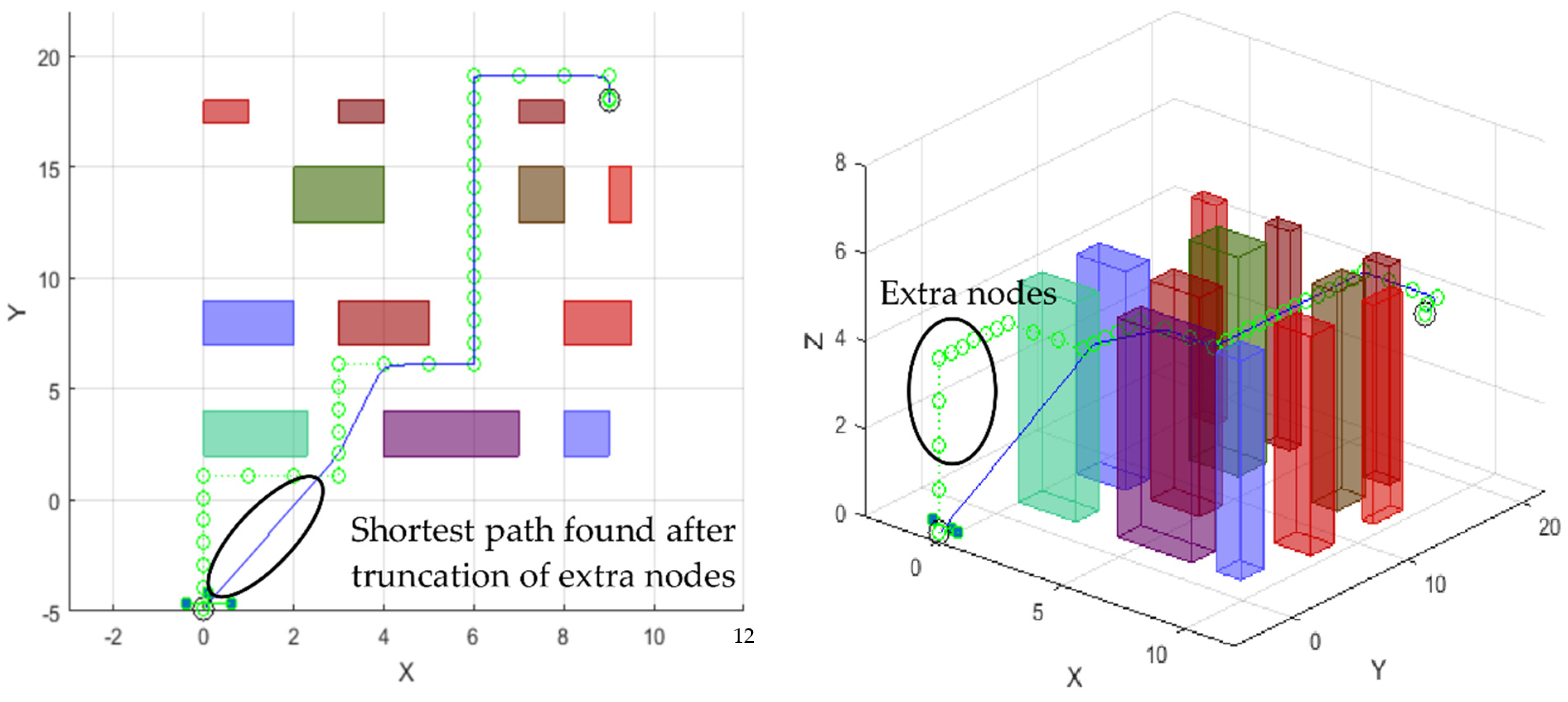
| Algorithm 3 Proposed algorithm to refine the path obtained from conventional A* approach |
| 1: function truncated_path = truncation(3D_Environment, P(n)) |
| 2: Truncated_path = P(1); |
| 3: E.obstacles = 3D_Environment.obstacles; |
| 4: for i = 2: length of path |
| 5: P = P(i) − P(1); |
| 6: if (collision between E.obstacles and P) |
| 7: Truncated _path = P(i − 1) % store the node explored just before collision-node into the truncated path list. |
| 8: else if (i == length of path) |
| 9: Truncated _path = P(i); % store last node in the truncated list |
| 10: else |
| 11: continue; |
| 12: end if |
| 13: end for loop |
3.2. Trajectory Generation
3.2.1. Constraints on Positions
3.2.2. Constraints on Derivatives
3.2.3. Constraints on Start and Goal Points
4. Simulations
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Farid, G.; Mo, H.; Ali, S.M.; Liwei, Q. A review on linear and nonlinear control techniques for position and attitude control of a quadrotor. Control. Intell. Syst. 2017, 45, 43–57. [Google Scholar]
- Kendoul, F. Survey of advances in guidance, navigation, and control of unmanned rotorcraft systems. J. Field Robot. 2012, 29, 315–378. [Google Scholar] [CrossRef]
- Liu, P.; Chen, A.Y.; Huang, Y.N.; Han, J.Y.; Lai, J.S.; Kang, S.C.; Wu, T.H.; Wen, M.C.; Tsai, M.H. A review of rotorcraft Unmanned Aerial Vehicle (UAV) developments and applications in civil engineering. Smart. Struct. Syst. 2014, 13, 1065–1094. [Google Scholar] [CrossRef]
- Özbek, N.S.; Önkol, M.; Efe, M.Ö. Feedback control strategies for quadrotor-type aerial robots: A survey. Trans. Inst. Meas. Control. 2016, 38, 529–554. [Google Scholar] [CrossRef]
- Zhang, X.; Li, X.; Wang, K.; Lu, Y. A Survey of Modelling and Identification of Quadrotor Robot. Abstr. Appl. Anal. 2014, 2014, 16. [Google Scholar] [CrossRef]
- Bullo, F.; Frazzoli, E.; Pavone, M.; Savla, K.; Smith, S.L. Dynamic Vehicle Routing for Robotic Systems. Proc. IEEE 2011, 99, 1482–1504. [Google Scholar] [CrossRef] [Green Version]
- Mo, H.; Farid, G. Nonlinear and adaptive intelligent control techniques for quadrotor UAV—A survey. Asian J. Control 2019, 21, 989–1008. [Google Scholar] [CrossRef]
- Tokekar, P.; Hook, J.V.; Mulla, D.; Isler, V. Sensor planning for a symbiotic UAV and UGV system for precision agriculture. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 5321–5326. [Google Scholar]
- Alexis, K.; Nikolakopoulos, G.; Tzes, A. On Trajectory Tracking Model Predictive Control of an Unmanned Quadrotor Helicopter Subject to Aerodynamic Disturbances. Asian J. Control 2014, 16, 209–224. [Google Scholar] [CrossRef]
- Besnard, L.; Shtessel, Y.B.; Landrum, B. Quadrotor vehicle control via sliding mode controller driven by sliding mode disturbance observer. J. Frankl. Inst. 2012, 349, 658–684. [Google Scholar] [CrossRef]
- Ghommam, J.; Charland, G.; Saad, M. Three-Dimensional Constrained Tracking Control Via Exact Differentiation Estimator of a Quadrotor Helicopter. Asian J. Control 2015, 17, 1093–1103. [Google Scholar] [CrossRef]
- Lee, D.; Jin Kim, H.; Sastry, S. Feedback linearization vs. adaptive sliding mode control for a quadrotor helicopter. Int. J. Control Autom. Syst. 2009, 7, 419–428. [Google Scholar] [CrossRef]
- Mellinger, D.; Michael, N.; Kumar, V. Trajectory generation and control for precise aggressive maneuvers with quadrotors. Int. J. Robot. Res. 2012, 31, 664–674. [Google Scholar] [CrossRef]
- Xiong, J.-J.; Zhang, G. Discrete-time sliding mode control for a quadrotor UAV. Int. J. Light Electron Opt. 2016, 127, 3718–3722. [Google Scholar] [CrossRef]
- Zou, Y. Nonlinear robust adaptive hierarchical sliding mode control approach for quadrotors. Int. J. Robust Nonlinear Control 2017, 27, 925–941. [Google Scholar] [CrossRef]
- Chen, Y.-b.; Luo, G.-c.; Mei, Y.-s.; Yu, J.-q.; Su, X.-l. UAV path planning using artificial potential field method updated by optimal control theory. Int. J. Syst. Sci. 2016, 47, 1407–1420. [Google Scholar] [CrossRef]
- Duchoň, F.; Babinec, A.; Kajan, M.; Beňo, P.; Florek, M.; Fico, T.; Jurišica, L. Path Planning with Modified a Star Algorithm for a Mobile Robot. Procedia Eng. 2014, 96, 59–69. [Google Scholar] [CrossRef] [Green Version]
- Foead, D.; Ghifari, A.; Kusuma, M.B.; Hanafiah, N.; Gunawan, E. A Systematic Literature Review of A* Pathfinding. Procedia Comput. Sci. 2021, 179, 507–514. [Google Scholar] [CrossRef]
- Tang, G.; Tang, C.; Claramunt, C.; Hu, X.; Zhou, P. Geometric A-Star Algorithm: An Improved A-Star Algorithm for AGV Path Planning in a Port Environment. IEEE Access 2021, 9, 59196–59210. [Google Scholar] [CrossRef]
- Zheng, T.; Xu, Y.; Zheng, D. AGV Path Planning based on Improved A-star Algorithm. In Proceedings of the 2019 IEEE 3rd Advanced Information Management, Communicates, Electronic and Automation Control Conference (IMCEC), Chongqing, China, 11–13 October 2019; pp. 1534–1538. [Google Scholar]
- Erke, S.; Bin, D.; Yiming, N.; Qi, Z.; Liang, X.; Dawei, Z. An improved A-Star based path planning algorithm for autonomous land vehicles. Int. J. Adv. Robot. Syst. 2020, 17, 1729881420962263. [Google Scholar] [CrossRef]
- Ghaffari, A. An Energy Efficient Routing Protocol for Wireless Sensor Networks using A-star Algorithm. J. Appl. Res. Technol. 2014, 12, 815–822. [Google Scholar] [CrossRef] [Green Version]
- Castillo-García, P.; Muñoz Hernandez, L.E.; García Gil, P. Chapter 9—Trajectory Generation, Planning &Tracking. In Indoor Navigation Strategies for Aerial Autonomous Systems; Butterworth-Heinemann: Oxford, UK, 2017; pp. 213–241. [Google Scholar]
- Wang, G.-G.; Chu, H.E.; Mirjalili, S. Three-dimensional path planning for UCAV using an improved bat algorithm. Aerosp. Sci. Technol. 2016, 49, 231–238. [Google Scholar] [CrossRef]
- Chen, Y.; Mei, Y.; Yu, J.; Su, X.; Xu, N. Three-dimensional unmanned aerial vehicle path planning using modified wolf pack search algorithm. Neurocomputing 2017, 266, 445–457. [Google Scholar] [CrossRef]
- Contreras-Cruz, M.A.; Ayala-Ramirez, V.; Hernandez-Belmonte, U.H. Mobile robot path planning using artificial bee colony and evolutionary programming. Appl. Soft. Comput. 2015, 30, 319–328. [Google Scholar] [CrossRef]
- Liang, Y.; Juntong, Q.; Xiao, J.; Xia, Y. A literature review of UAV 3D path planning. In Proceedings of the 11th World Congress on Intelligent Control and Automation, Shenyang, China, 29 June–4 July 2014; pp. 2376–2381. [Google Scholar]
- Lu, Y.; Xue, Z.; Xia, G.-S.; Zhang, L. A survey on vision-based UAV navigation. Geo-Spat. Inf. Sci. 2018, 21, 21–32. [Google Scholar] [CrossRef] [Green Version]
- Aggarwal, S.; Kumar, N. Path planning techniques for unmanned aerial vehicles: A review, solutions, and challenges. Comput. Commun. 2020, 149, 270–299. [Google Scholar] [CrossRef]
- Goerzen, C.; Kong, Z.; Mettler, B. A Survey of Motion Planning Algorithms from the Perspective of Autonomous UAV Guidance. J. Intell. Robot. Syst. 2009, 57, 65. [Google Scholar] [CrossRef]
- Zhao, Y.; Zheng, Z.; Liu, Y. Survey on computational-intelligence-based UAV path planning. Knowl. Based Syst. 2018, 158, 54–64. [Google Scholar] [CrossRef]
- Mac, T.T.; Copot, C.; Tran, D.T.; De Keyser, R. Heuristic approaches in robot path planning: A survey. Robot. Auton. Syst. 2016, 86, 13–28. [Google Scholar] [CrossRef]
- Goel, U.; Varshney, S.; Jain, A.; Maheshwari, S.; Shukla, A. Three Dimensional Path Planning for UAVs in Dynamic Environment using Glow-worm Swarm Optimization. Procedia Comput. Sci. 2018, 133, 230–239. [Google Scholar] [CrossRef]
- Kunchev, V.; Jain, L.; Ivancevic, V.; Finn, A. Path Planning and Obstacle Avoidance for Autonomous Mobile Robots: A Review. In Knowledge-Based Intelligent Information and Engineering Systems; Springer: Berlin/Heidelberg, Germany, 2006; pp. 537–544. [Google Scholar]
- Dadkhah, N.; Mettler, B. Survey of Motion Planning Literature in the Presence of Uncertainty: Considerations for UAV Guidance. J. Intell. Robot. Syst. 2012, 65, 233–246. [Google Scholar] [CrossRef]
- Cocuzza, S.; Doria, A. Modeling and Identification of Vibrations in a UAV for Aerial Manipulation. Mech. Mach. Sci. 2021, 91, 182–190. [Google Scholar] [CrossRef]
- Cocuzza, S.; Doria, A. Experimental vibration analysis and development of the dynamic model of a uav for aerial manipulation. Int. J. Mech. Control. 2021, 22, 71–81. [Google Scholar]
- Cocuzza, S.; Rossetto, E.; Doria, A. Dynamic interaction between robot and UAV in aerial manipulation. In Proceedings of the 2020 19th International Conference on Mechatronics—Mechatronika, Prague, Czech Republic, 2–4 December 2020. [Google Scholar] [CrossRef]
- Cocuzza, S.; Pretto, I.; Debei, S. Least-squares-based reaction control of space manipulators. J. Guid. Control. Dyn. 2012, 35, 976–986. [Google Scholar] [CrossRef]
- Tringali, A.; Cocuzza, S. Globally optimal inverse kinematics method for a redundant robot manipulator with linear and nonlinear constraints. Robotics 2020, 9, 61. [Google Scholar] [CrossRef]
- Tringali, A.; Cocuzza, S. Finite-horizon kinetic energy optimization of a redundant space manipulator. Appl. Sci. Switz. 2021, 11, 2346. [Google Scholar] [CrossRef]
- Cocuzza, S.; Menon, C.; Angrilli, F. Free-flying robot tested on ESA parabolic flights: Simulated microgravity tests and simulator validation. In Proceedings of the International Astronautical Federation—58th International Astronautical Congress, Hyderabad, India, 24–28 September 2007; Volume 1, pp. 593–608. [Google Scholar]
- Farid, G.; Mo, H.; Ahmed, M.I.; Ehsan, A. On control law partitioning for nonlinear control of a quadrotor UAV. In Proceedings of the 2018 15th International Bhurban Conference on Applied Sciences and Technology (IBCAST), Islamabad, Pakistan, 9–13 January 2018; pp. 257–262. [Google Scholar]
- Farid, G.; Hamid, H.T.; Karim, S.; Tahir, S. Waypoint-Based Generation of Guided and Optimal Trajectories for Autonomous Tracking Using a Quadrotor UAV. Stud. Inform. Control. 2018, 27, 223–234. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit |
|---|---|---|
| Mass (m) | 0.2 | kg |
| Arm length (l) | 0.09 | m |
| Inertia (Ix) | 0.00026 | kgm2 |
| Inertia (Iy) | 0.00026 | kgm2 |
| Inertia (Iz) | 0.00040 | kgm2 |
| Gravity (g) | 9.81 | m/s2 |
| Controller | Parameter | Value |
|---|---|---|
| Outer Loop Controller | (x, y, z) | 2 |
| Outer Loop Controller | (x, y, z) | 1.4 |
| Inner Loop Controller | ) | 7 |
| Inner Loop Controller | () | 0.3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Farid, G.; Cocuzza, S.; Younas, T.; Razzaqi, A.A.; Wattoo, W.A.; Cannella, F.; Mo, H. Modified A-Star (A*) Approach to Plan the Motion of a Quadrotor UAV in Three-Dimensional Obstacle-Cluttered Environment. Appl. Sci. 2022, 12, 5791. https://doi.org/10.3390/app12125791
Farid G, Cocuzza S, Younas T, Razzaqi AA, Wattoo WA, Cannella F, Mo H. Modified A-Star (A*) Approach to Plan the Motion of a Quadrotor UAV in Three-Dimensional Obstacle-Cluttered Environment. Applied Sciences. 2022; 12(12):5791. https://doi.org/10.3390/app12125791
Chicago/Turabian StyleFarid, Ghulam, Silvio Cocuzza, Talha Younas, Asghar Abbas Razzaqi, Waqas Ahmad Wattoo, Ferdinando Cannella, and Hongwei Mo. 2022. "Modified A-Star (A*) Approach to Plan the Motion of a Quadrotor UAV in Three-Dimensional Obstacle-Cluttered Environment" Applied Sciences 12, no. 12: 5791. https://doi.org/10.3390/app12125791
APA StyleFarid, G., Cocuzza, S., Younas, T., Razzaqi, A. A., Wattoo, W. A., Cannella, F., & Mo, H. (2022). Modified A-Star (A*) Approach to Plan the Motion of a Quadrotor UAV in Three-Dimensional Obstacle-Cluttered Environment. Applied Sciences, 12(12), 5791. https://doi.org/10.3390/app12125791