
Rolling Bearing Fault Diagnosis Based on Time-Frequency Compression Fusion and Residual Time-Frequency Mixed Attention Network


Abstract
:1. Introduction
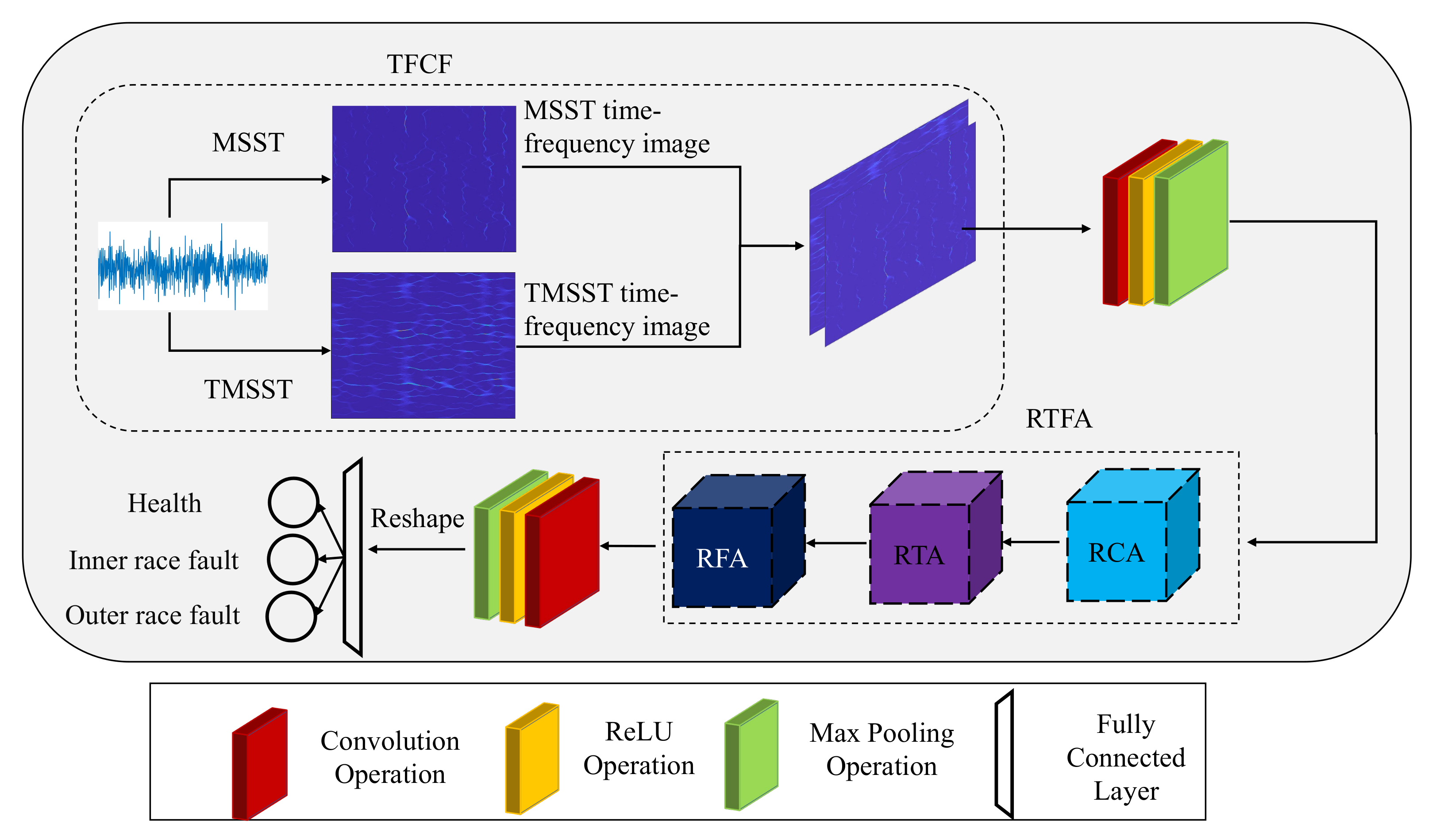
2. The Proposed Method
2.1. Time-Frequency Compression Fusion
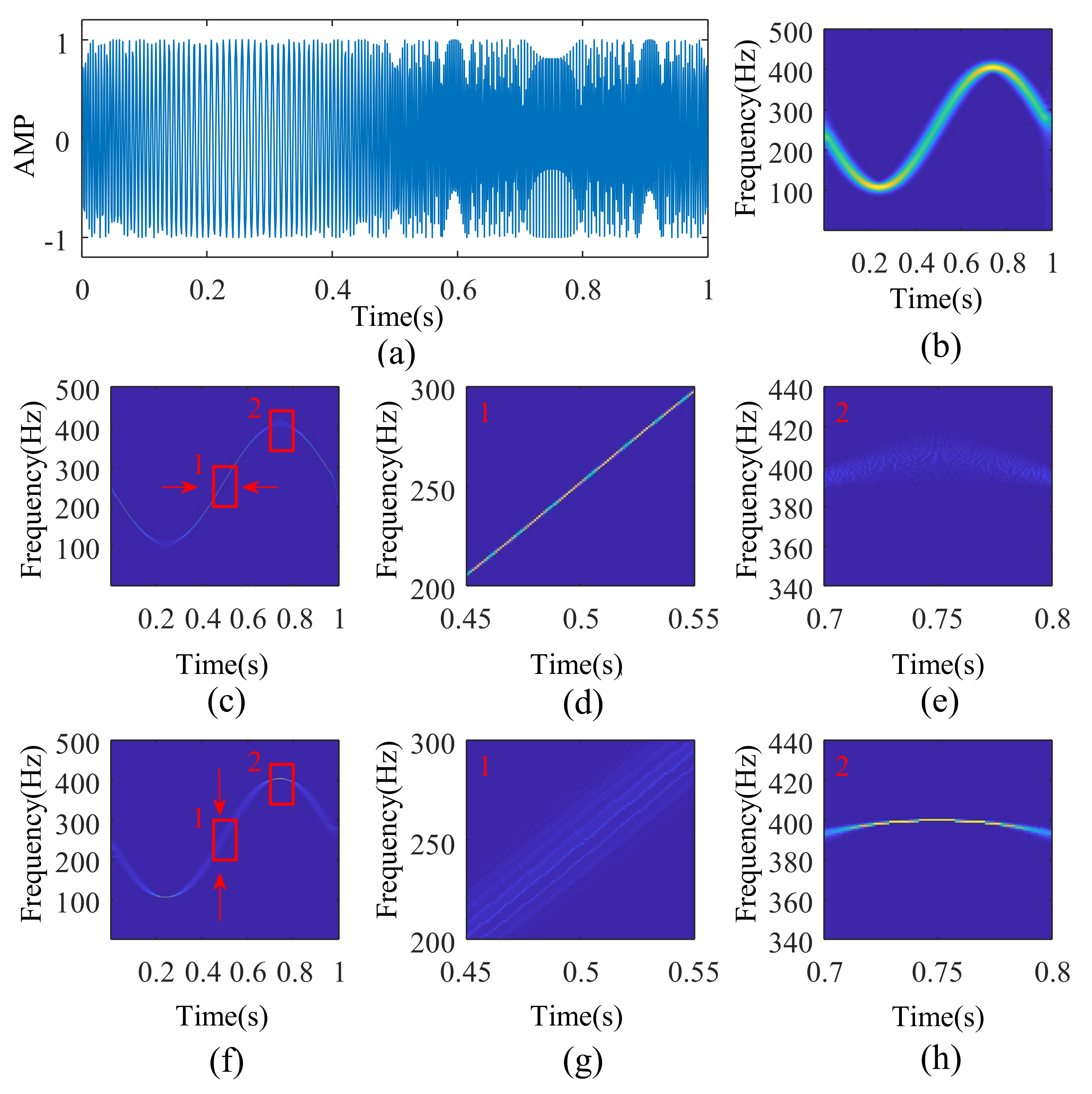
2.1.1. Time-Reassigned Multisynchrosqueezing Transform
2.1.2. Multisynchrosqueezing Transform
2.1.3. Comparison of the Two Methods
2.1.4. Time-Frequency Compression Fusion
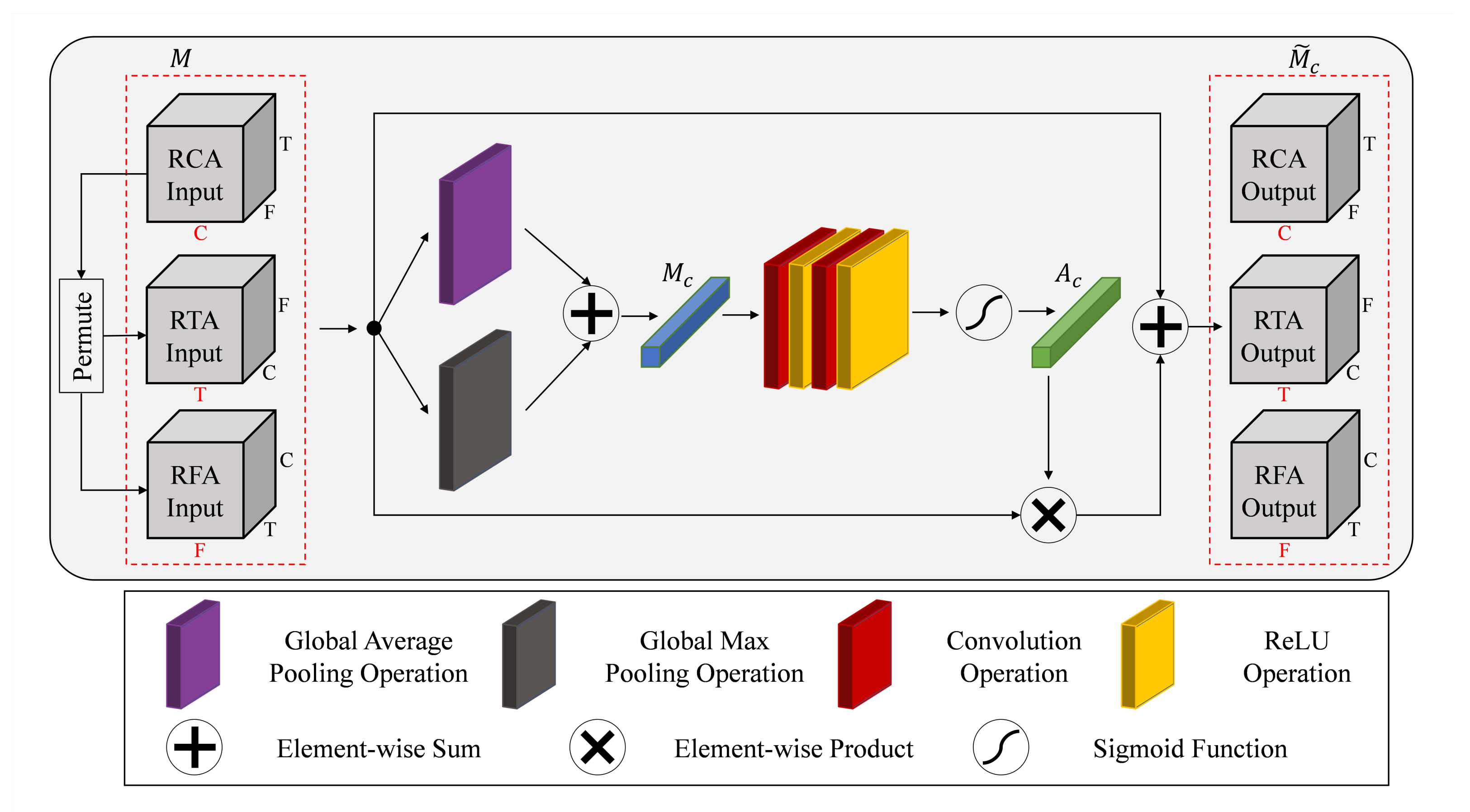
2.2. Residual Time-Frequency Mixed Attention Module Network
2.2.1. Residual Time-Frequency Mixed Attention Module
2.2.2. Loss Function
3. Experiments and Results
3.1. The Experimental Data
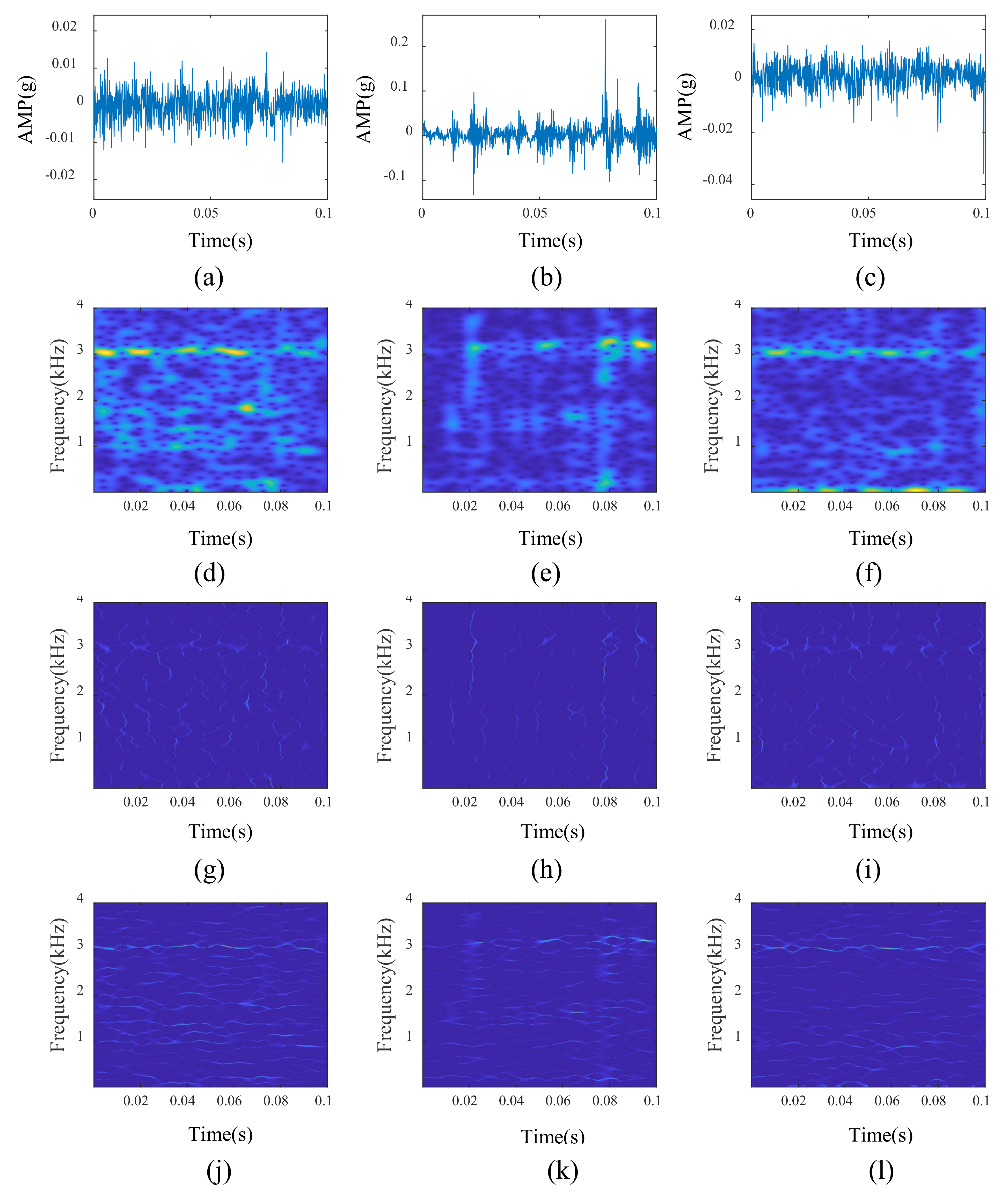
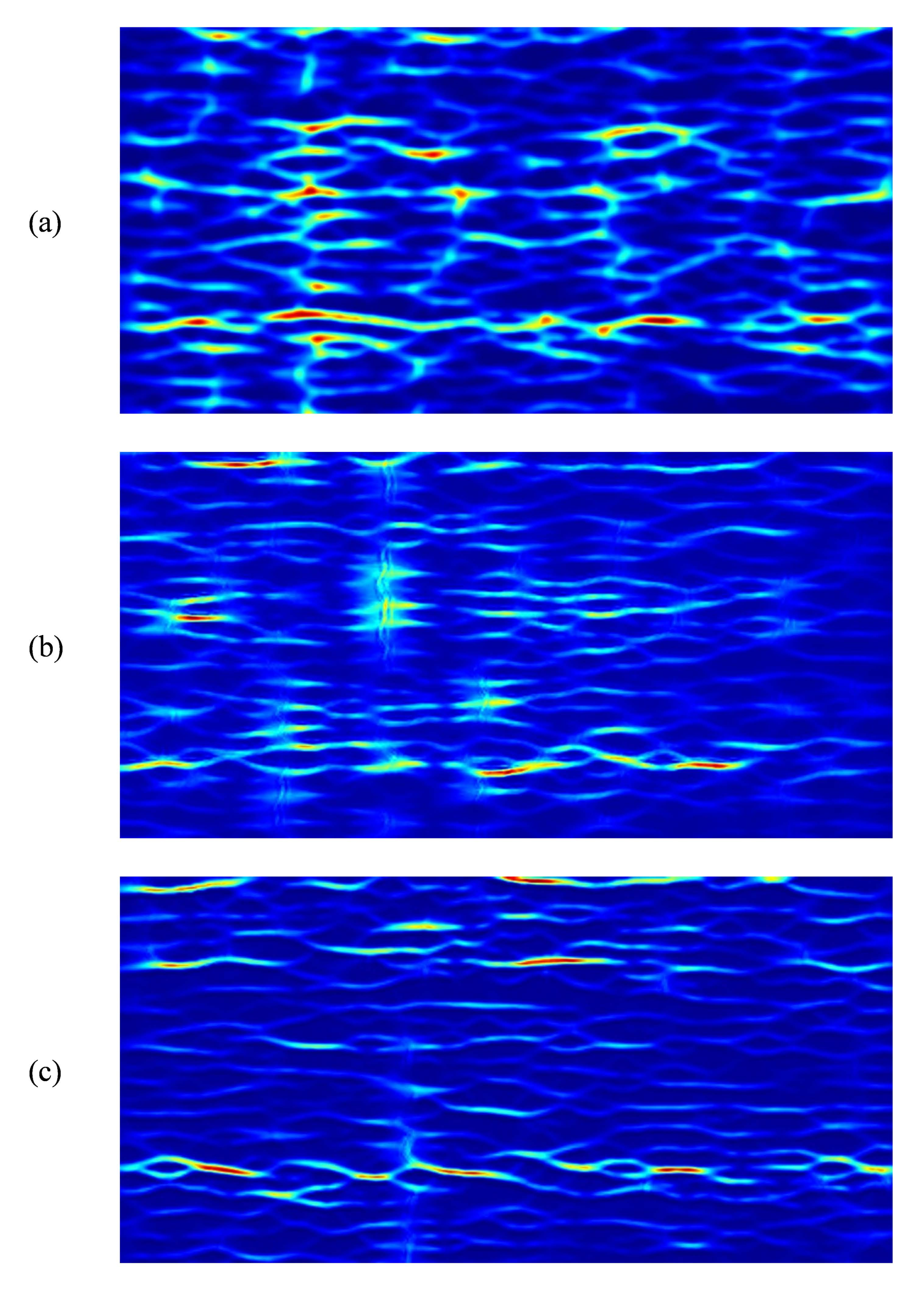
3.2. Time-Frequency Image of Vibration Signal
3.3. Model Parameter Setting
3.4. Ablation Experiments
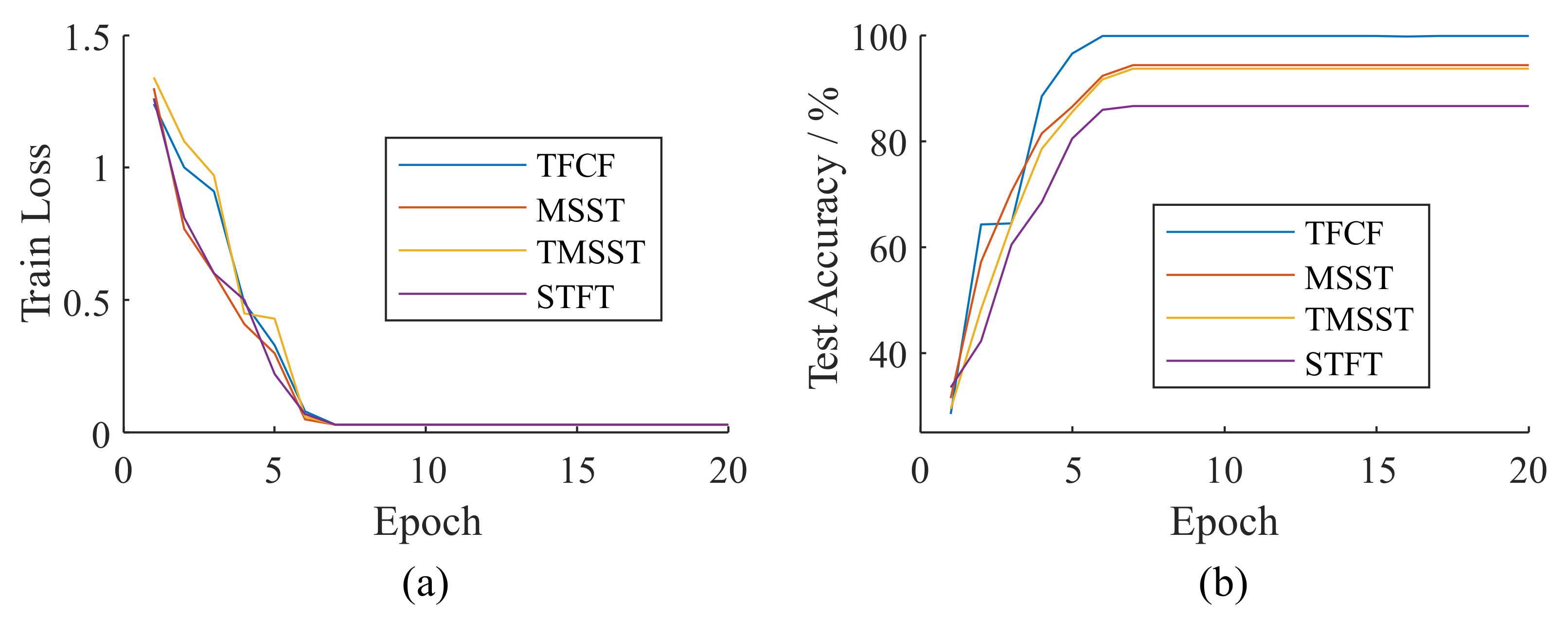
3.4.1. Different Time-Frequency Image Input
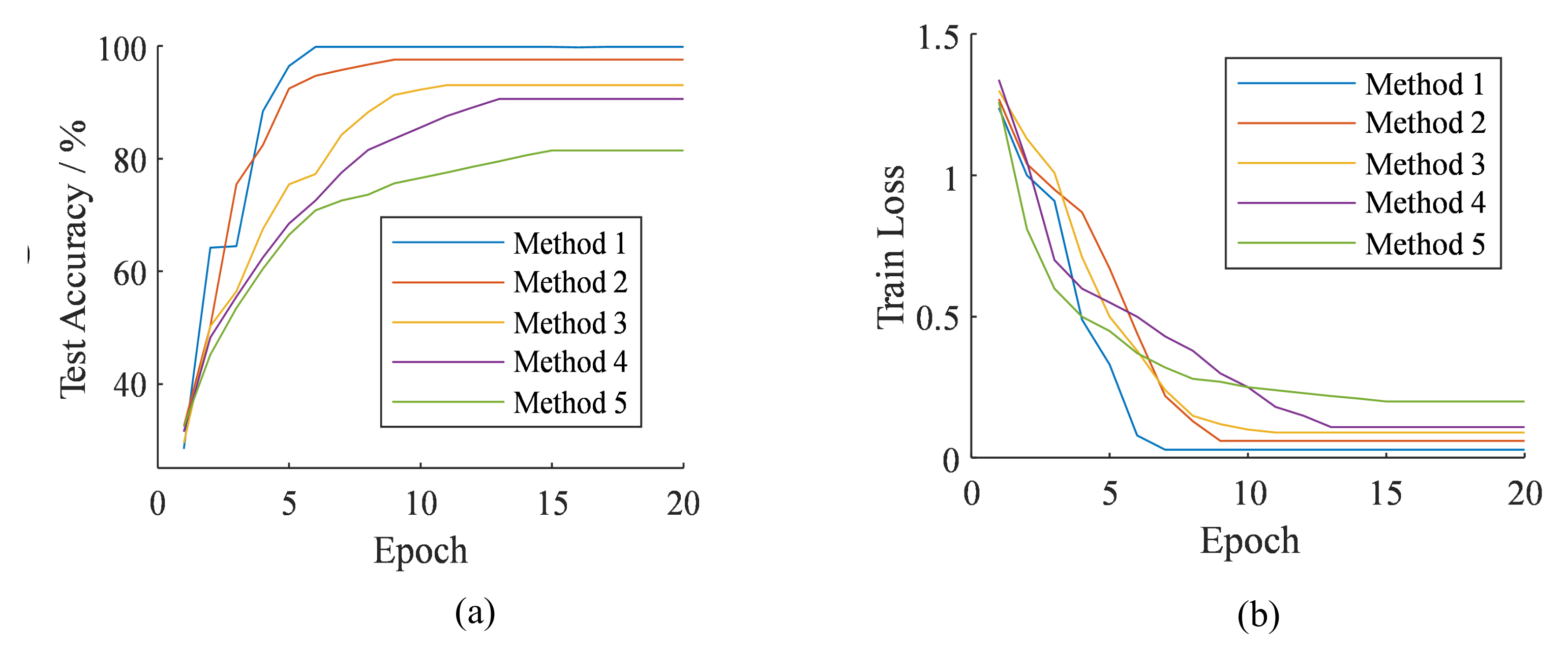
3.4.2. Different Model Combinations
3.5. Comparisons with Other Methods
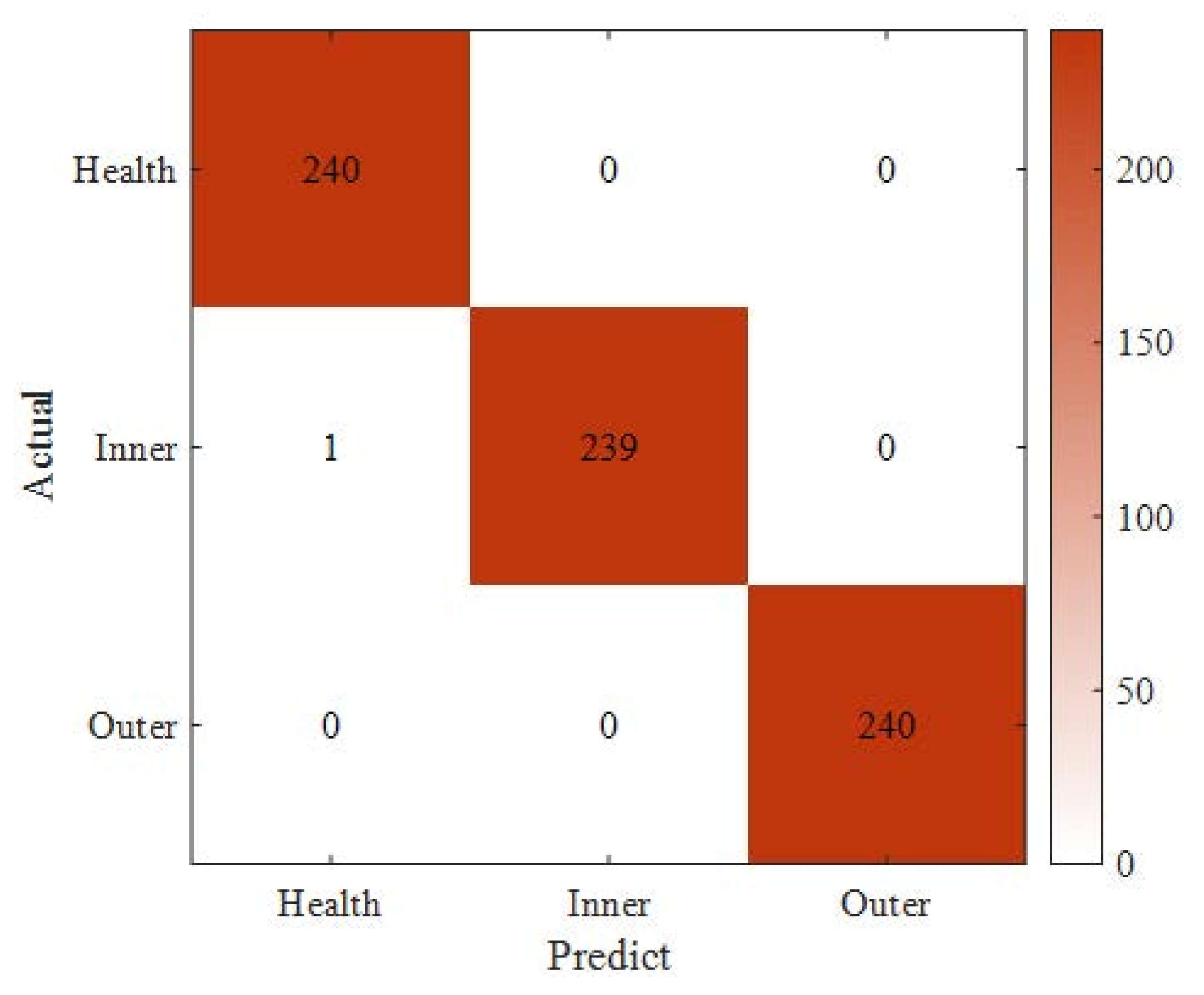
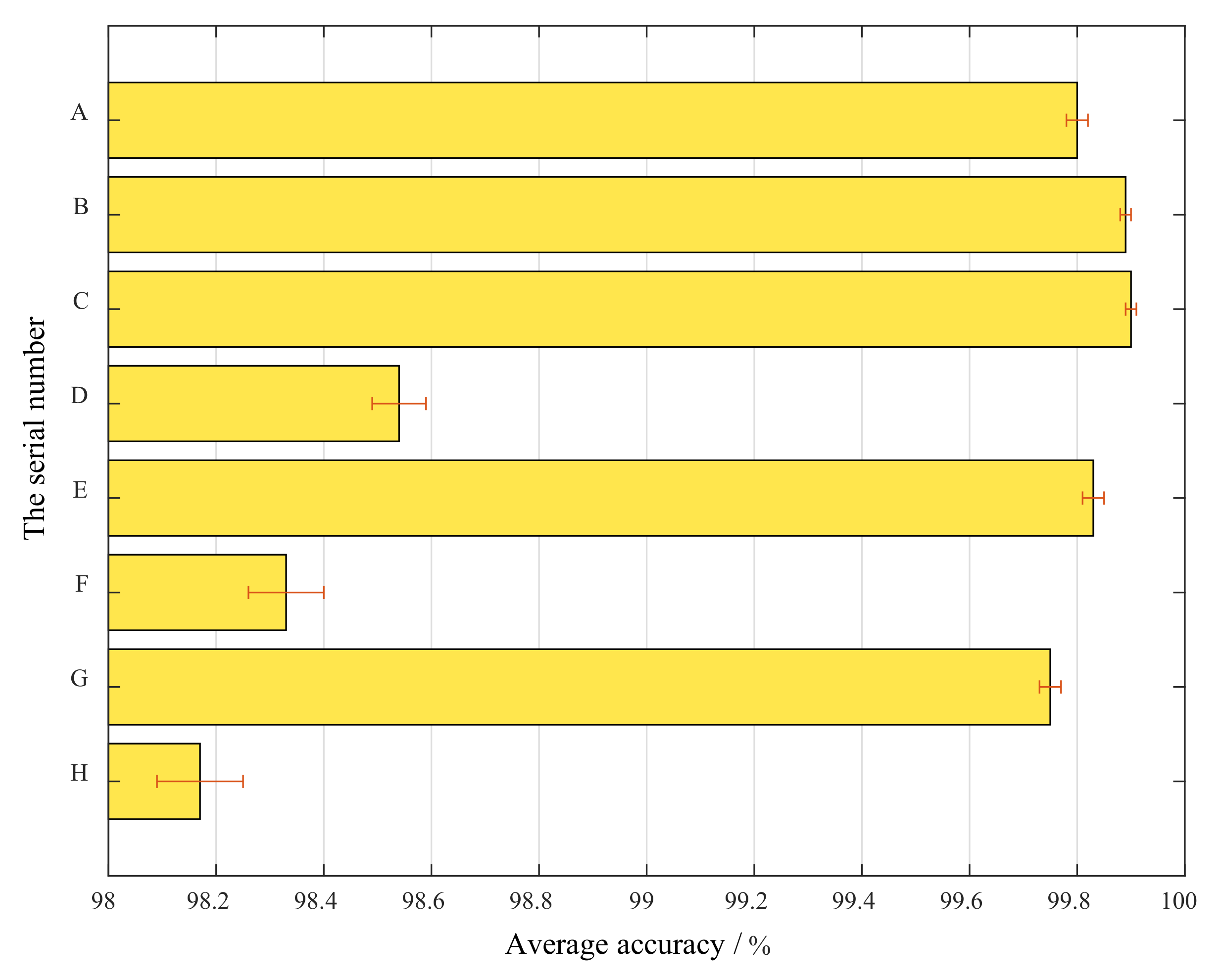
3.6. Model Performance Test
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Allen, J. Short term spectral analysis, synthesis, and modification by discrete Fourier transform. IEEE Trans. Acoust. Speech Signal Process. 1977, 25, 235–238. [Google Scholar] [CrossRef]
- Morlet, J.; Arens, G.; Fourgeau, E.; Giard, D. Wave propagation and sampling theory; Part I, Complex signal and scattering in multilayered media. Geophysics 1982, 47, 203–221. [Google Scholar] [CrossRef] [Green Version]
- Stockwell, R.; Mansinha, L.; Lowe, R. Localization of the complex spectrum: The S transform. IEEE Trans. Signal Process. 1996, 44, 998–1001. [Google Scholar] [CrossRef]
- Ma, J.; Li, S.; Wang, X. Condition Monitoring of Rolling Bearing Based on Multi-Order FRFT and SSA-DBN. Symmetry 2022, 14, 320. [Google Scholar] [CrossRef]
- Zhu, H.; He, Z.; Wei, J.; Wang, J.; Zhou, H. Bearing Fault Feature Extraction and Fault Diagnosis Method Based on Feature Fusion. Sensors 2021, 21, 2524. [Google Scholar] [CrossRef]
- Gituku, E.W.; Kimotho, J.K.; Njiri, J.G. Cross-domain bearing fault diagnosis with refined composite multiscale fuzzy entropy and the self organizing fuzzy classifier. Eng. Rep. 2021, 3, e12307. [Google Scholar] [CrossRef]
- Daubechies, I. The wavelet transform, time-frequency localization and signal analysis. IEEE Trans. Inf. Theory 1990, 36, 961–1005. [Google Scholar] [CrossRef] [Green Version]
- Daubechies, I.; Lu, J.; Wu, H.T. Synchrosqueezed wavelet transforms: An empirical mode decomposition-like tool. Appl. Comput. Harmon. Anal. 2011, 30, 243–261. [Google Scholar] [CrossRef] [Green Version]
- Auger, F.; Flandrin, P.; Lin, Y.T.; McLaughlin, S.; Meignen, S.; Oberlin, T.; Wu, H.T. Time-Frequency Reassignment and Synchrosqueezing: An Overview. IEEE Signal Process. Mag. 2013, 30, 32–41. [Google Scholar] [CrossRef] [Green Version]
- Huang, Z.l.; Zhang, J.; Zhao, T.H.; Sun, Y. Synchrosqueezing S-Transform and Its Application in Seismic Spectral Decomposition. IEEE Trans. Geosci. Remote. Sens. 2015, 54, 1–9. [Google Scholar] [CrossRef]
- Yu, G.; Wang, Z.; Zhao, P. Multisynchrosqueezing Transform. IEEE Trans. Ind. Electron. 2019, 66, 5441–5455. [Google Scholar] [CrossRef]
- Yu, G.; Lin, T.; Wang, Z.; Li, Y. Time-Reassigned Multisynchrosqueezing Transform for Bearing Fault Diagnosis of Rotating Machinery. IEEE Trans. Ind. Electron. 2021, 68, 1486–1496. [Google Scholar] [CrossRef]
- Sun, G.; Gao, Y.; Lin, K.; Hu, Y. Fine-Grained Fault Diagnosis Method of Rolling Bearing Combining Multisynchrosqueezing Transform and Sparse Feature Coding Based on Dictionary Learning. Shock Vib. 2019, 2019, 1531079. [Google Scholar] [CrossRef] [Green Version]
- Sun, G.; Gao, Y.; Xu, Y.; Feng, W. Data-Driven Fault Diagnosis Method Based on Second-Order Time-Reassigned Multisynchrosqueezing Transform and Evenly Mini-Batch Training. IEEE Access 2020, 8, 120859–120869. [Google Scholar] [CrossRef]
- Yu, G. A multisynchrosqueezing-based high-resolution time-frequency analysis tool for the analysis of non-stationary signals. J. Sound Vib. 2020, 492, 115813. [Google Scholar] [CrossRef]
- Zheng, J.; Gu, M.; Pan, H.; Tong, J. A Fault Classification Method for Rolling Bearing Based on Multisynchrosqueezing Transform and WOA-SMM. IEEE Access 2020, 8, 215355–215364. [Google Scholar] [CrossRef]
- Yu, K.; Wang, X.; Cheng, Y. A Post-Processing Method for Time-Reassigned Multisynchrosqueezing Transform and Its Application in Processing the Strong Frequency-Varying Signal. IEEE Trans. Instrum. Meas. 2021, 70, 1–11. [Google Scholar] [CrossRef]
- Feiyue, D.; Liu, C.; Liu, Y.; Hao, R. A Hybrid SVD-Based Denoising and Self-Adaptive TMSST for High-Speed Train Axle Bearing Fault Detection. Sensors 2021, 21, 6025. [Google Scholar]
- Lin, Y.; Li, Y.; Yin, X.; Dou, Z. Multisensor Fault Diagnosis Modeling Based on the Evidence Theory. IEEE Trans. Reliab. 2018, 67, 513–521. [Google Scholar] [CrossRef]
- Mao, W.; Feng, W.; Liu, Y.; Zhang, D.; Liang, X. A new deep auto-encoder method with fusing discriminant information for bearing fault diagnosis. Mech. Syst. Signal Process. 2021, 150, 107233. [Google Scholar] [CrossRef]
- Mao, W.; Feng, W.; Liang, X. A novel deep output kernel learning method for bearing fault structural diagnosis. Mech. Syst. Signal Process. 2019, 117, 293–318. [Google Scholar] [CrossRef]
- Cui, M.; Wang, Y.; Lin, X.; Zhong, M. Fault Diagnosis of Rolling Bearings Based on an Improved Stack Autoencoder and Support Vector Machine. IEEE Sens. J. 2020, 21, 4927–4937. [Google Scholar] [CrossRef]
- Zhang, S.; Ye, F.; Wang, B.; Habetler, T. Semi-Supervised Bearing Fault Diagnosis and Classification Using Variational Autoencoder-Based Deep Generative Models. IEEE Sens. J. 2020, 21, 6476–6486. [Google Scholar] [CrossRef]
- Dixit, S.; Verma, N. Intelligent Condition-Based Monitoring of Rotary Machines With Few Samples. IEEE Sens. J. 2020, 20, 14337–14346. [Google Scholar] [CrossRef]
- Xu, M.; Wang, Y. An Imbalanced Fault Diagnosis Method for Rolling Bearing Based on Semi-Supervised Conditional Generative Adversarial Network With Spectral Normalization. IEEE Access 2021, 9, 27736–27747. [Google Scholar] [CrossRef]
- Zheng, T.; Song, L.; Wang, J.; Teng, W.; Xu, X.; Ma, C. Data synthesis using dual discriminator conditional generative adversarial networks for imbalanced fault diagnosis of rolling bearings. Measurements 2020, 158, 107741. [Google Scholar] [CrossRef]
- Yin, H.; Li, Z.; Zuo, J.; Liu, H.; Yang, K.; Li, F. Wasserstein Generative Adversarial Network and Convolutional Neural Network (WG-CNN) for Bearing Fault Diagnosis. Math. Probl. Eng. 2020, 2020, 2604191. [Google Scholar] [CrossRef]
- Wang, M.; Lin, Y.; Tian, Q.; Si, G. Transfer Learning Promotes 6G Wireless Communications: Recent Advances and Future Challenges. IEEE Trans. Reliab. 2021, 70, 790–807. [Google Scholar] [CrossRef]
- Lin, Y.; Tu, Y.; Dou, Z. An Improved Neural Network Pruning Technology for Automatic Modulation Classification in Edge Devices. IEEE Trans. Veh. Technol. 2020, 69, 5703–5706. [Google Scholar] [CrossRef]
- You, D.; Chen, L.; Liu, F.; Zhang, Y.; Shang, W.; Hu, Y.; Liu, W. Intelligent Fault Diagnosis of Bearing Based on Convolutional Neural Network and Bidirectional Long Short-Term Memory. Shock Vib. 2021, 2021, 7346352. [Google Scholar] [CrossRef]
- Zhang, T.; Liu, S.; Wei, Y.; Zhang, H. A novel feature adaptive extraction method based on deep learning for bearing fault diagnosis. Measurement 2021, 185, 110030. [Google Scholar] [CrossRef]
- Wang, Y.; Huang, S.; Dai, J.; Tang, J. A Novel Bearing Fault Diagnosis Methodology Based on SVD and One-Dimensional Convolutional Neural Network. Shock Vib. 2020, 2020, 1850286. [Google Scholar] [CrossRef]
- Ji, M.; Peng, G.; He, J.; Liu, S.; Chen, Z.; Li, S. A Two-Stage, Intelligent Bearing-Fault-Diagnosis Method Using Order-Tracking and a One-Dimensional Convolutional Neural Network with Variable Speeds. Sensors 2021, 21, 675. [Google Scholar] [CrossRef] [PubMed]
- Khorram, A.; Khalooei, M.; Rezghi, M. End-to-end CNN + LSTM deep learning approach for bearing fault diagnosis. Appl. Intell. 2021, 51, 1–16. [Google Scholar] [CrossRef]
- Bera, A.; Dutta, A.; Dhara, A.K. Deep Learning based Fault Classification Algorithm for Roller Bearings using Time-Frequency Localized Features. In Proceedings of the International Conference on Computing, Communication, and Intelligent Systems (ICCCIS), Greater Noida, India, 19–20 February 2021; pp. 419–424. [Google Scholar]
- Xu, Y.; Li, Z.; Wang, S.; Li, W.; Sarkodie-Gyan, T.; Feng, S. A hybrid deep-learning model for fault diagnosis of rolling bearings. Measurement 2021, 169, 108502. [Google Scholar] [CrossRef]
- Shenfield, A.; Howarth, M. A Novel Deep Learning Model for the Detection and Identification of Rolling Element-Bearing Faults. Sensors 2020, 20, 5112. [Google Scholar] [CrossRef]
- Guo, S.; Yang, T.; Gao, W.; Zhang, C. A Novel Fault Diagnosis Method for Rotating Machinery Based on a Convolutional Neural Network. Sensors 2018, 18, 1429. [Google Scholar] [CrossRef] [Green Version]
- Duan, S.; Zheng, H.; Liu, J. A Novel Classification Method for Flutter Signals Based on the CNN and STFT. Int. J. Aerosp. Eng. 2019, 2019, 1–8. [Google Scholar] [CrossRef]
- Guo, M.F.; Yang, N.C.; Chen, W.F. Deep-Learning-Based Fault Classification Using Hilbert-Huang Transform and Convolutional Neural Network in Power Distribution Systems. IEEE Sensors J. 2019, 19, 6905–6913. [Google Scholar] [CrossRef]
- Shao, H.; Zhang, X.; Cheng, J.; Yu, Y. Intelligent Fault Diagnosis of Bearing Using Enhanced Deep Transfer Auto-encoders. J. Mech. Eng. 2020, 9, 84–90. [Google Scholar]
- Zhuang, Z.; Lv, H.; Xu, J.; Zizhao, H.; Qin, W. A Deep Learning Method for Bearing Fault Diagnosis through Stacked Residual Dilated Convolutions. Appl. Sci. 2019, 9, 1823. [Google Scholar] [CrossRef] [Green Version]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Bahdanau, D.; Cho, K.; Bengio, Y. Neural Machine Translation by Jointly Learning to Align and Translate. arXiv 2014, arXiv:1409.0473. [Google Scholar]
- Mnih, V.; Heess, N.; Graves, A.; Kavukcuoglu, K. Recurrent Models of Visual Attention. In Proceedings of the 27th International Conference on Neural Information Processing Systems, Montreal, QC, Canada, 8–13 December 2014; Volume 2, pp. 2204–2212. [Google Scholar]
- Huang, H.; Baddour, N. Bearing vibration data collected under time-varying rotational speed conditions. Data Brief 2018, 21, 1745–1749. [Google Scholar] [CrossRef] [PubMed]
- Selvaraju, R.R.; Cogswell, M.; Das, A.; Vedantam, R.; Parikh, D.; Batra, D. Grad-CAM: Visual Explanations from Deep Networks via Gradient-Based Localization. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 618–626. [Google Scholar]
- Hu, J.; Shen, L.; Albanie, S.; Sun, G.; Wu, E. Squeeze-and-Excitation Networks. IEEE Trans. Pattern Anal. Mach. Intell. 2020, 42, 2011–2023. [Google Scholar] [CrossRef] [PubMed] [Green Version]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bearing Condition | Variable Speed Condition | Training Set | Validation Set | Test Set | Class (Label) |
|---|---|---|---|---|---|
| Healthy state | 720 | 240 | 240 | 1 | |
| Inner race fault | 720 | 240 | 240 | 2 | |
| Outer race fault | 720 | 240 | 240 | 3 |
| The Network Layer | Nuclear Size | Step Length | Output Channel | Output Size |
|---|---|---|---|---|
| Input | - | - | - | |
| Conv1 | 1 | 6 | ||
| ReLU | - | - | - | |
| Max Pooling | 2 | - | ||
| RCA | - | - | 3; 6 | |
| RTA | - | - | 99; 198 | |
| RFA | - | - | 199; 398 | |
| Conv2 | 1 | 16 | ||
| ReLU | - | - | - | |
| Max Pooling | 2 | - | ||
| FC1 | - | - | 120 | |
| FC2 | - | - | 84 | |
| FC3 | - | - | 3 | |
| Softmax | - | - | 3 |
| The Time-Frequency Image | Average Recognition Accuracy (%) | Standard Deviation (%) |
|---|---|---|
| TFCF | 99.80 | 0.02 |
| MSST | 94.13 | 0.09 |
| TMSST | 93.51 | 0.06 |
| STFT | 85.62 | 0.23 |
| Number | CNN | SENet | RCA | RTA | TFA | FC | Average Accuracy | Standard Deviation |
|---|---|---|---|---|---|---|---|---|
| 1 | √ | - | √ | √ | √ | √ | 99.80 | 0.02 |
| 2 | √ | - | √ | - | - | √ | 97.17 | 0.11 |
| 3 | √ | √ | - | - | - | √ | 93.09 | 0.10 |
| 4 | √ | - | - | - | - | √ | 90.34 | 0.09 |
| 5 | - | - | - | - | - | - | 81.5 | 0.46 |
| Method | Fault Types | Accuracy (%) |
|---|---|---|
| TFCF+RTFANet (Proposed) | 3 | 99.86 |
| FRFT+SSA-DBN [4] | 3 | 95 |
| STFT+CNN [32] | 3 | 96 |
| WPT-MWSVD+SVM [5] | 3 | 87.8 |
| CNN-BLSTM [30] | 3 | 99.2 |
| ResNet-STAC-tanh [31] | 3 | 90.77 |
| RCMFE+SOF [6] | 3 | 95.8 |
| The Serial Number | Sample Size of Training Set | Sample Size of Test Set | Sampling Time (s) | Sampling Frequency |
|---|---|---|---|---|
| A | 2160 | 720 | 0.1 | 8 |
| B | 1800 | 1800 | 0.1 | 8 |
| C | 180 | 3420 | 0.1 | 8 |
| D | 108 | 3492 | 0.1 | 8 |
| E | 180 | 3420 | 0.05 | 8 |
| F | 180 | 3420 | 0.025 | 8 |
| G | 180 | 3420 | 0.05 | 4 |
| H | 180 | 3420 | 0.05 | 2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, G.; Yang, X.; Xiong, C.; Hu, Y.; Liu, M. Rolling Bearing Fault Diagnosis Based on Time-Frequency Compression Fusion and Residual Time-Frequency Mixed Attention Network. Appl. Sci. 2022, 12, 4831. https://doi.org/10.3390/app12104831
Sun G, Yang X, Xiong C, Hu Y, Liu M. Rolling Bearing Fault Diagnosis Based on Time-Frequency Compression Fusion and Residual Time-Frequency Mixed Attention Network. Applied Sciences. 2022; 12(10):4831. https://doi.org/10.3390/app12104831
Chicago/Turabian StyleSun, Guodong, Xiong Yang, Chenyun Xiong, Ye Hu, and Moyun Liu. 2022. "Rolling Bearing Fault Diagnosis Based on Time-Frequency Compression Fusion and Residual Time-Frequency Mixed Attention Network" Applied Sciences 12, no. 10: 4831. https://doi.org/10.3390/app12104831
APA StyleSun, G., Yang, X., Xiong, C., Hu, Y., & Liu, M. (2022). Rolling Bearing Fault Diagnosis Based on Time-Frequency Compression Fusion and Residual Time-Frequency Mixed Attention Network. Applied Sciences, 12(10), 4831. https://doi.org/10.3390/app12104831