
Distributed 3-D Path Planning for Multi-UAVs with Full Area Surveillance Based on Particle Swarm Optimization



Abstract
:1. Introduction
1.1. Related Work
1.2. Main Contributions
2. System Model for UAV Path Planning
2.1. Problem Description
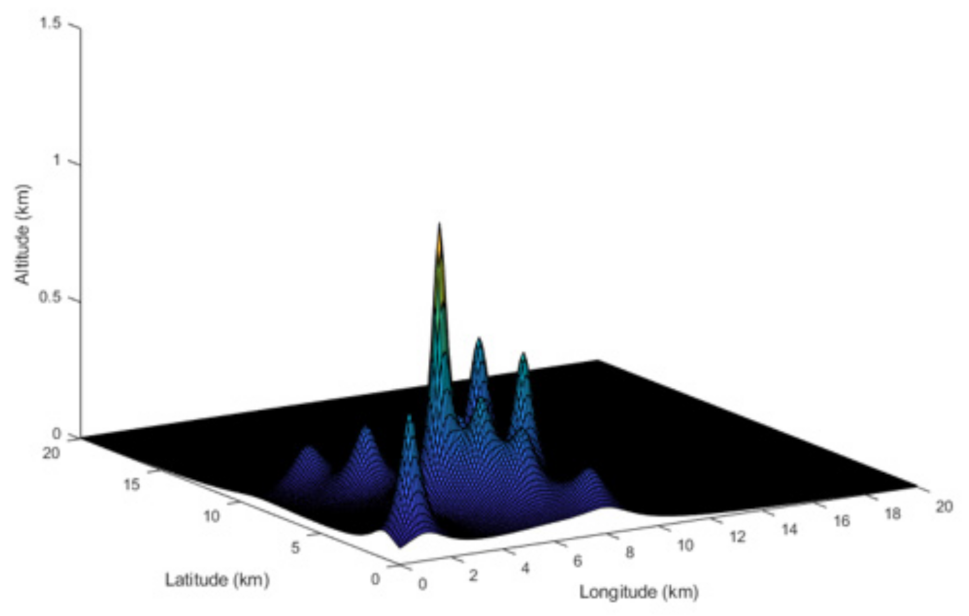
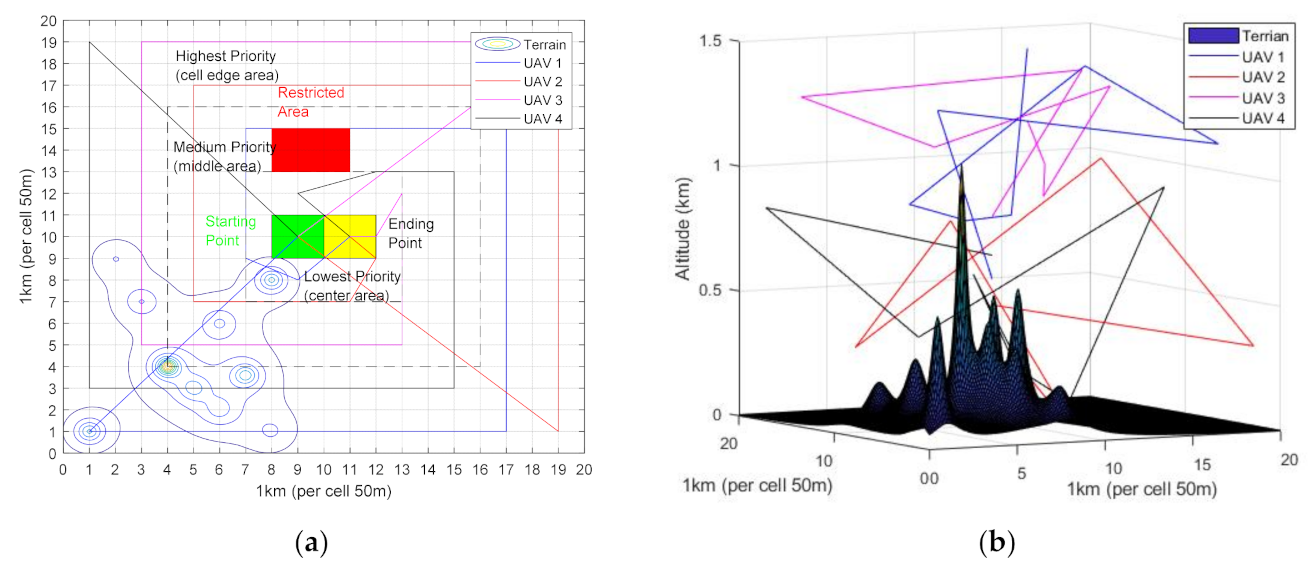
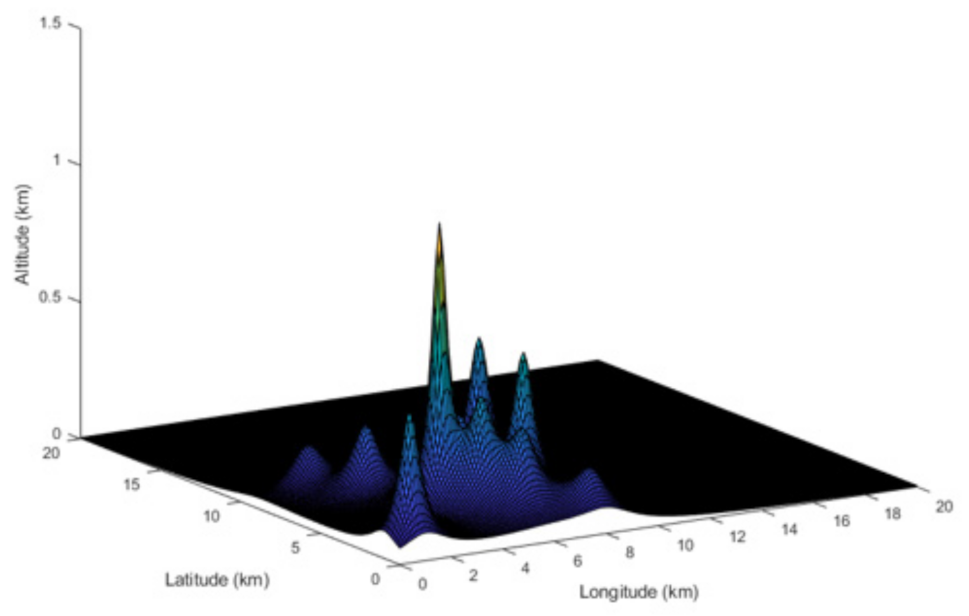
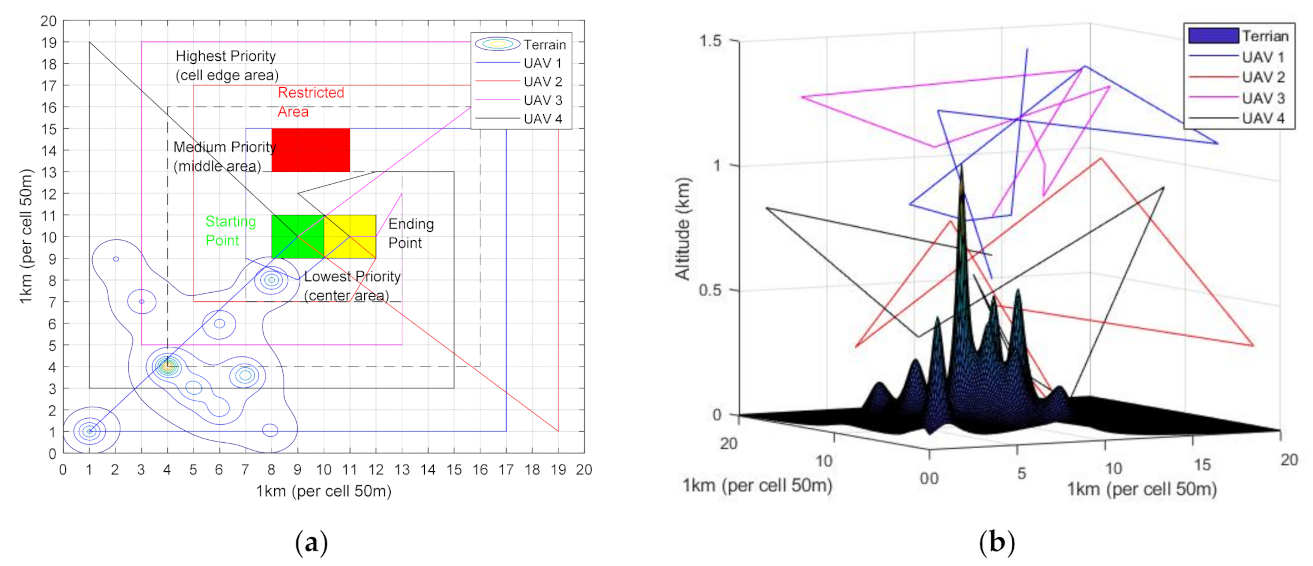
2.2. Operational Area Representation
2.3. Trajectory Planning
3. Mathematical Model for Optimal Trajectory Planning
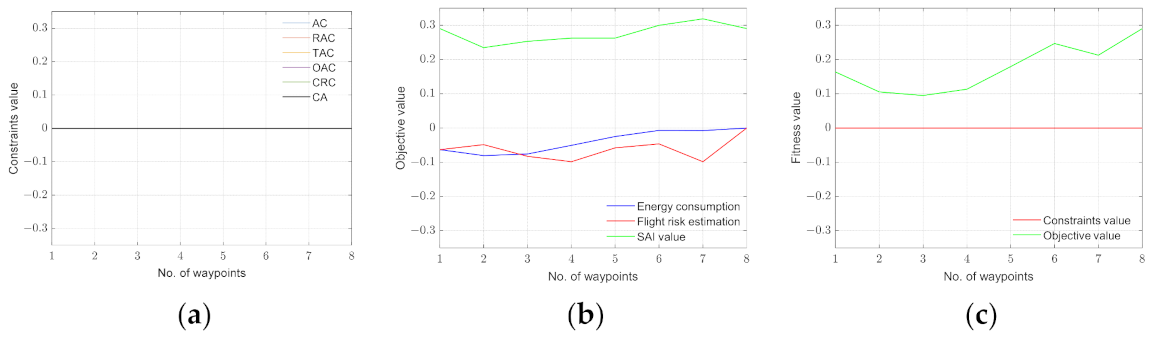
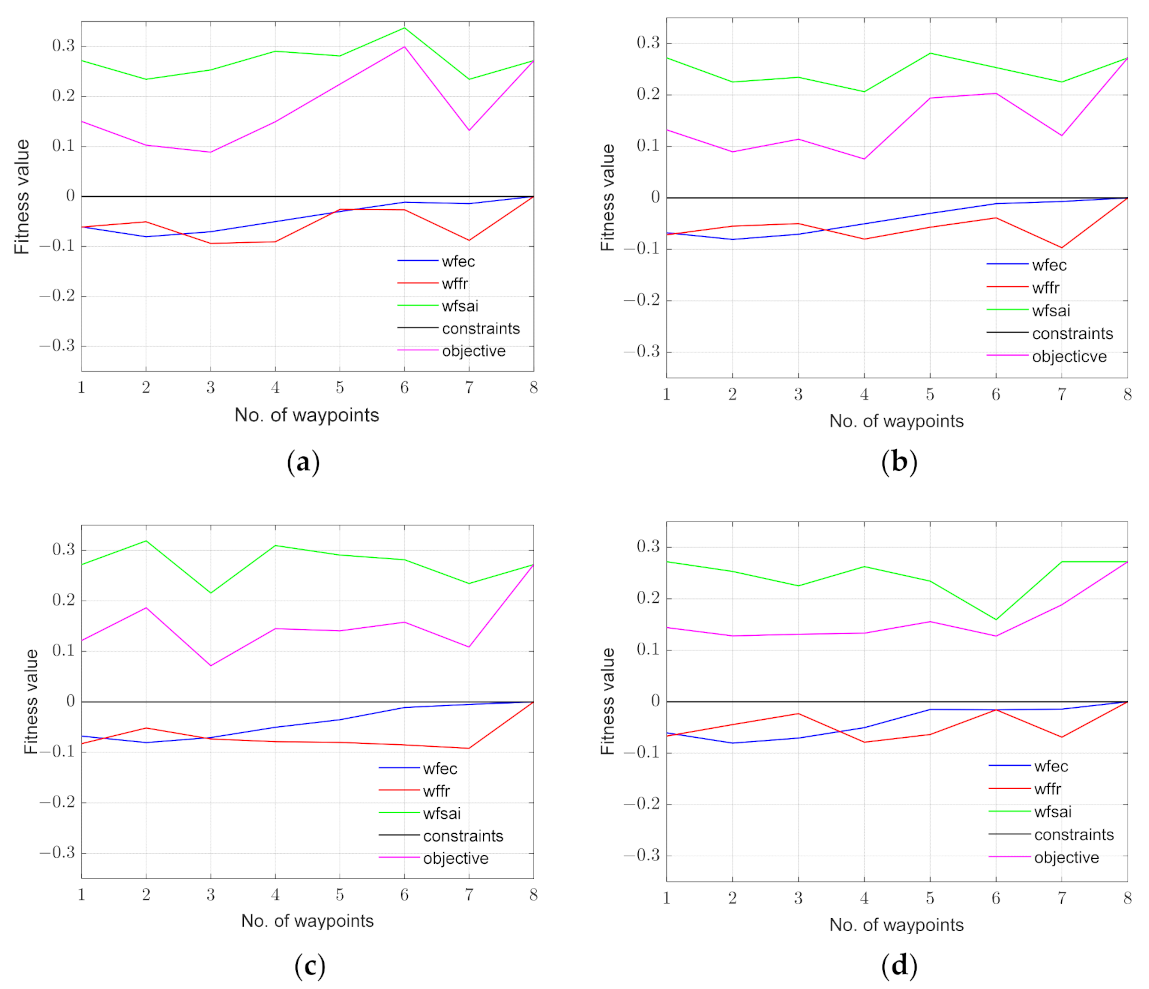
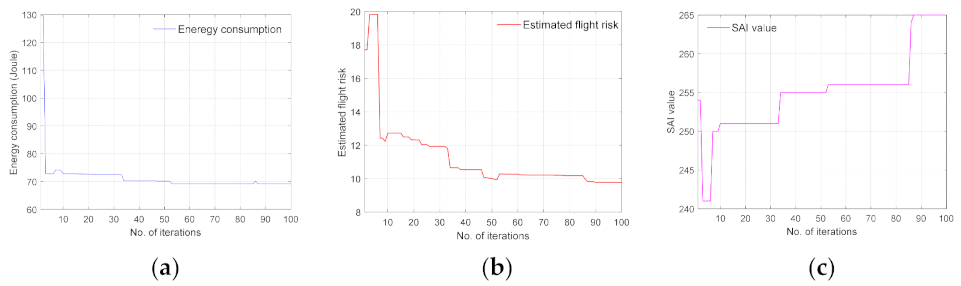
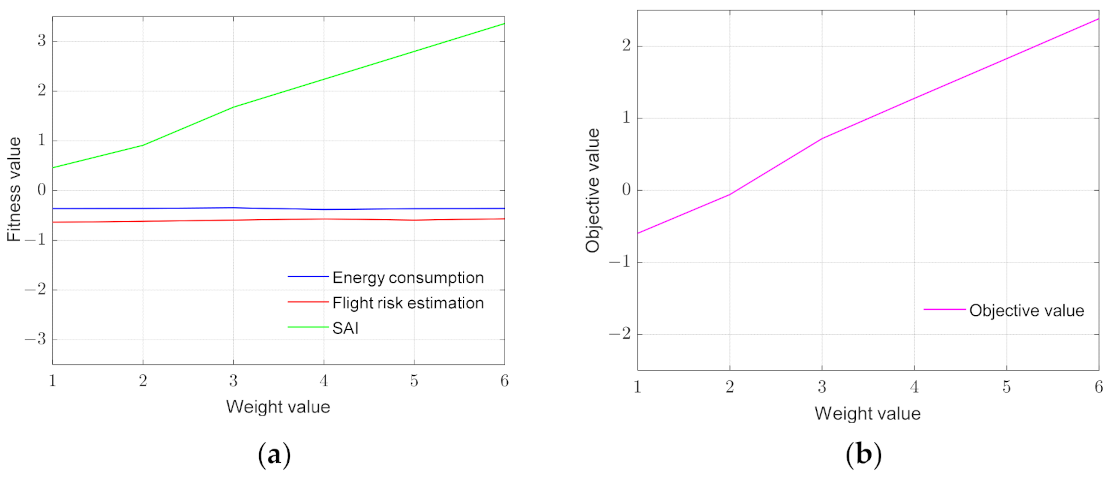
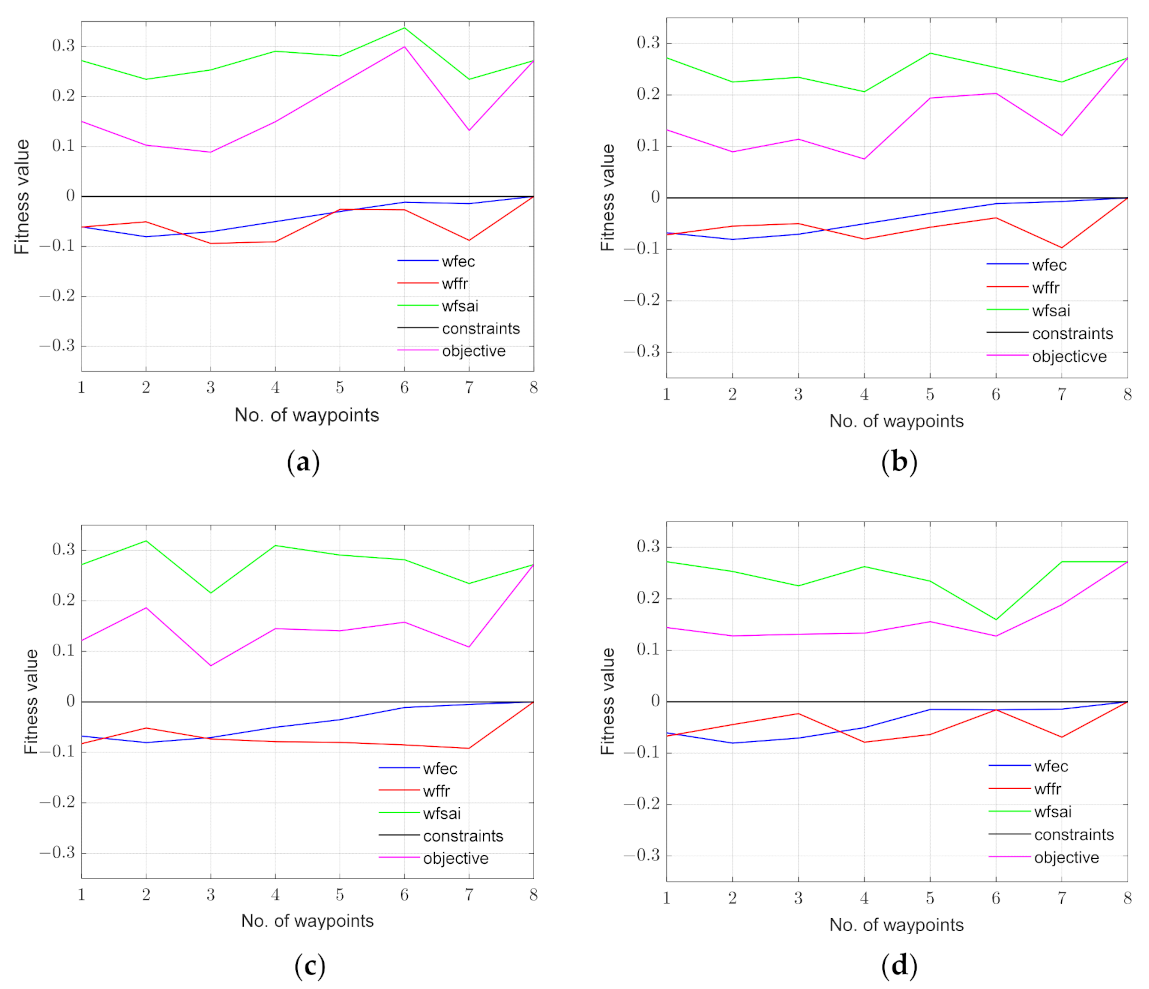
3.1. Dynamic Fitness Function Design
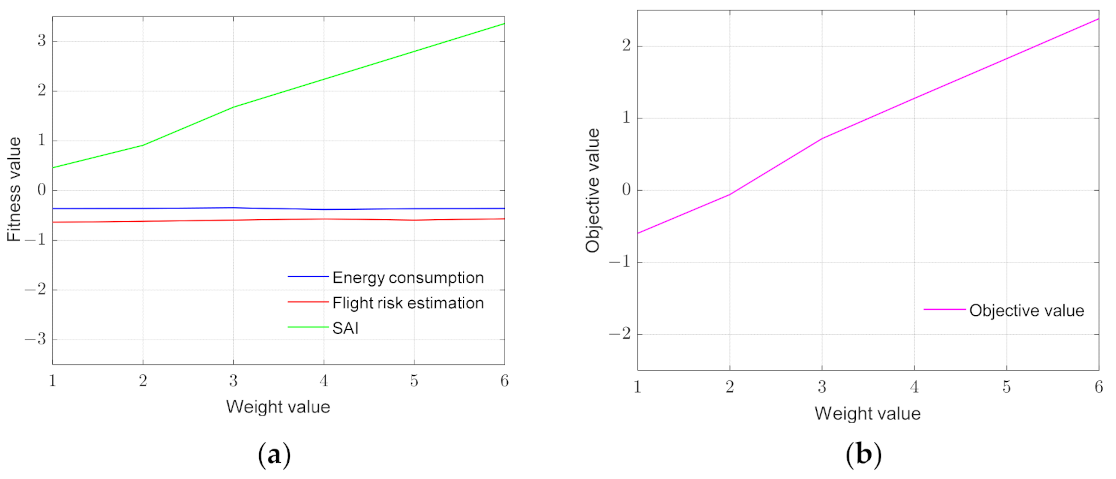
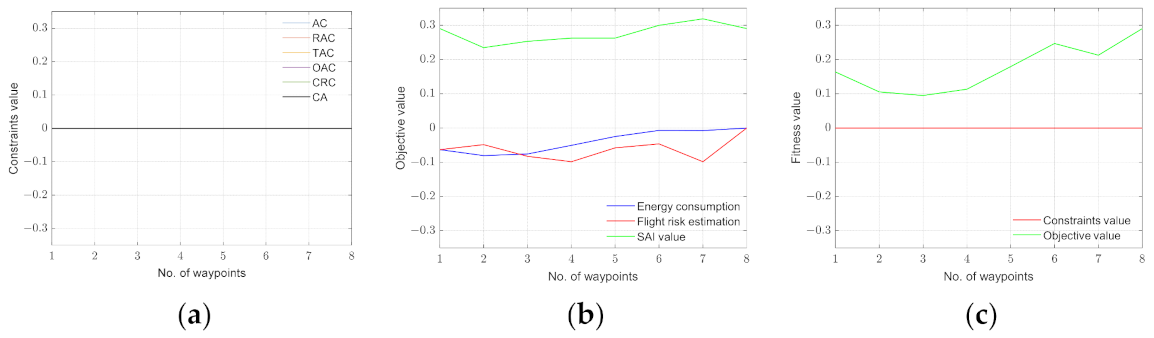
3.2. Objective Function Design
3.2.1. Energy Consumption (EC)
3.2.2. Flight Risk Estimation (FRE)
- Environmental Risk
- High Altitude Risk
3.2.3. Surveillance Area Important (SAI)
3.3. Constraint Function Design
3.3.1. Aerial Constraint (AC)
3.3.2. Restricted Area Constraint (RAC)
3.3.3. Turning Angle Constraint (TAC)
3.3.4. Operational Area Constraint (OAC)
3.3.5. Coverage Range Constraints (CRC)
3.3.6. Collision Avoidance (CA)
4. Proposed Distributed Trajectory Planner Based on PSO and Bresenham Algorithm
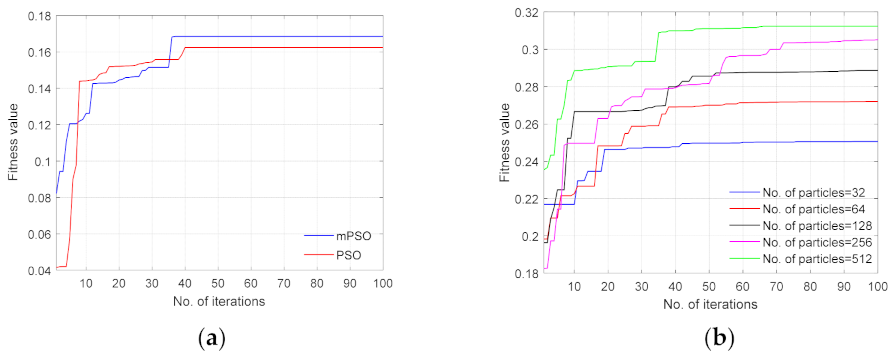
4.1. Particle Swarm Optimization
| Algorithm 1: Pseudocode for Dynamic Fitness Function using PSO. |
|
4.2. Bresenham Algorithm
- Either the one to its right (lower-bound for the line)
- On top, it is right and up (upper-bound for the line).
- Start from the two-line, starting point (x1, y1) and endpoint (xend, yend) and then calculate the constants where and .
- Calculate the first value of the decision parameter by using the equation:
- For each value of xi along the line, check the following condition, if pi < 0, the next point needs to be selected as (xi+1, yi) and:
- Otherwise, the next point to be selected is (xi+1, yi+1) and:
| Algorithm 2: Pseudocode of Bresenham Algorithm. |
|
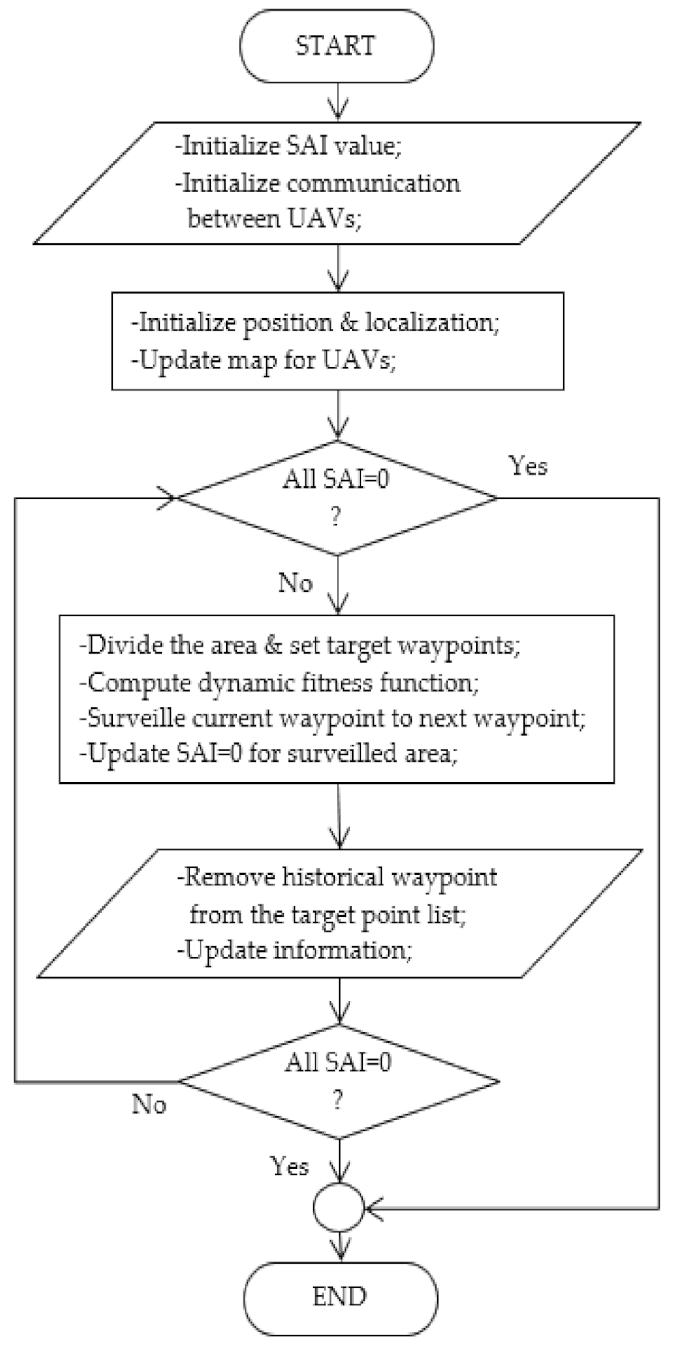
4.3. Distributed Path Planning for Multi-UAVs
| Algorithm 3: Pseudocode for Distributed Path Planning |
|
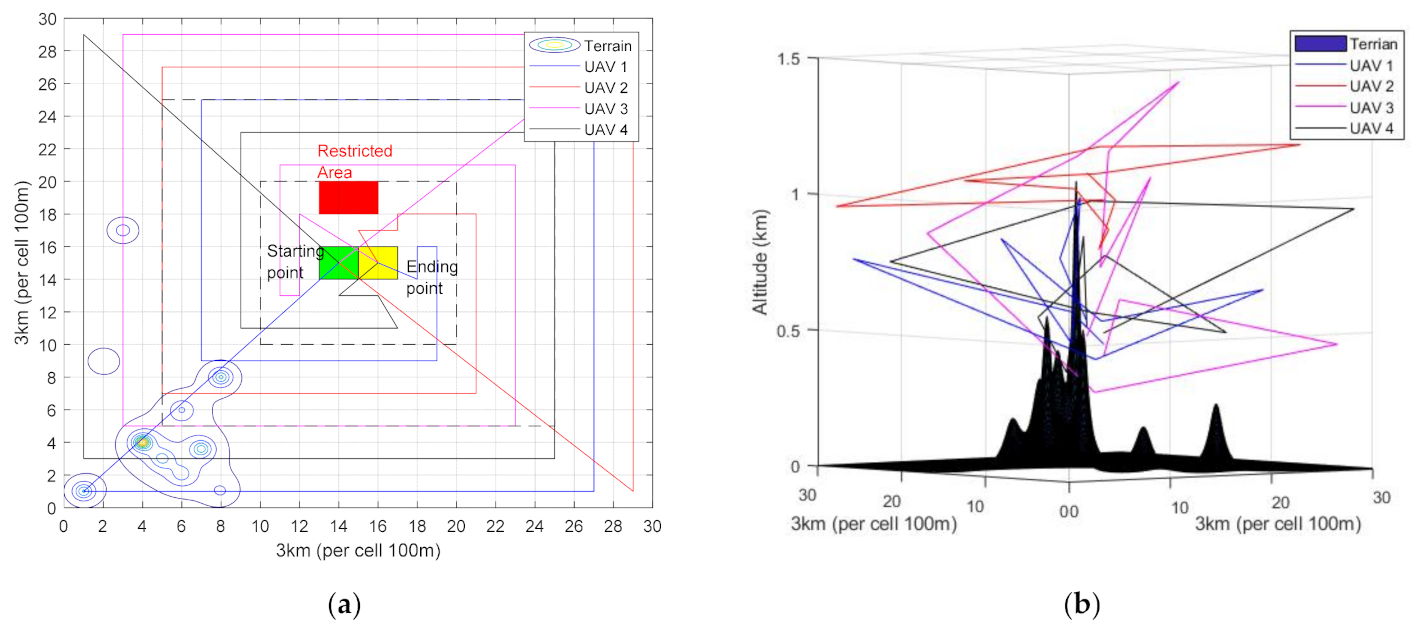
5. Simulation Results and Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| UAV | Unmanned Aerial Vehicle |
| PSO | Particle Swarm Optimization |
| mPSO | PSO with modified parameters |
| GBS | Ground Base Station |
| EC | Energy Consumption |
| FRE | Flight Risk Estimation |
| SAI | Surveillance Area Importance |
| AC | Aerial Constraint |
| RAC | Restricted Area Constraint |
| OAC | Operational Area Constraint |
| CRC | Coverage Range Constraint |
| TAC | Turning Angle Constraint |
| CA | Collision Avoidance |
References
- Teng, H.; Ahmad, I.; Msm, A.; Chang, K. 3D Optimal Surveillance Trajectory Planning for Multiple UAVs by Using Particle Swarm Optimization With Surveillance Area Priority. IEEE Access 2020, 8, 86316–86327. [Google Scholar] [CrossRef]
- Sheng, G.; Min, M.; Xiao, L.; Liu, S. Reinforcement Learning-Based Control for Unmanned Aerial Vehicles. J. Commun. Inf. Netw. 2018, 3, 39–48. [Google Scholar] [CrossRef]
- Yang, Q.; Yoo, S.-J. Optimal UAV Path Planning: Sensing Data Acquisition Over IoT Sensor Networks Using Multi-Objective Bio-Inspired Algorithms. IEEE Access 2018, 6, 13671–13684. [Google Scholar] [CrossRef]
- Zhan, C.; Zeng, Y.; Zhang, R. Energy-efficient data collection in UAV enabled wireless sensor network. IEEE Wirel. Commun. Lett. 2018, 7, 328–331. [Google Scholar] [CrossRef] [Green Version]
- Yang, L.; Qi, J.; Xiao, J.; Yong, X. A literature review of UAV 3D path planning. In Proceedings of the 11th World Congress on Intelligent Control and Automation, Shenyang, China, 29 June–4 July 2014; pp. 2376–2381. [Google Scholar] [CrossRef]
- Geraerts, R. Planning short paths with clearance using explicit corridors. In Proceedings of the IEEE International Conference on Robotics and Automation, Anchorage, Alaska, 3 May 2010; pp. 1997–2004. [Google Scholar]
- Yang, K.; Sukkarieh, S. Real-time continuous curvature path planning of UAVs in cluttered environments. In Proceedings of the 5th International Symposium on Mechatronics and Its Applications, ISMA 2008, Amman, Jordan, 27–29 May 2008; pp. 1–6. [Google Scholar]
- Cho, Y.; Kim, D.; Kim, D.S.K. Topology representation for the Voronoi diagram of 3D spheres. Int. J. CAD/CAM 2005, 5, 59–68. [Google Scholar]
- Musliman, I.A.; Rahman, A.A.; Coors, V. Implementing 3D network analysis in 3D-GIS. Int. Arch. ISPRS 2008, 37, 913–918. [Google Scholar]
- De Filippis, L.; Guglieri, G.; Quagliotti, F. Path Planning strategies for UAVs in 3D environments. J. Intell. Robot. Syst. 2012, 65, 247–264. [Google Scholar] [CrossRef]
- Carsten, J.; Ferguson, D.; Stentz, A. 3d field d: Improved path planning and replanning in three dimensions. In Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–15 October 2006; pp. 3381–3386. [Google Scholar]
- Miller, B.; Stepanyan, K.; Miller, A. 3D path planning in a threat environment. In Proceedings of the 2011 50th IEEE Conference on Decision and Control and European Control Conference (CDC-ECC), Orlando, FL, USA, 12–15 December 2011; pp. 6864–6869. [Google Scholar]
- Masehian, E.; Habibi, G. Robot path planning in 3D space using binary integer programming. Proc. World Acad. Sci. Eng. Technol. 2007, 23, 26–31. [Google Scholar]
- Chamseddine, A.; Zhang, Y.; Rabbath, C.A. Flatness-based trajectory planning/replanning for a quadrotor unmanned aerial vehicle. Aerosp. Electron. Syst. IEEE Trans. 2012, 48, 2832–2848. [Google Scholar] [CrossRef]
- Borrelli, F.; Subramanian, D.; Raghunathan, A.U. MILP and NLP techniques for centralized trajectory planning of multiple unmanned air vehicles. In Proceedings of the American Control Conference, Minneapolis, MN, USA, 14–16 June 2006; p. 6. [Google Scholar]
- Hasircioglu, I.; Topcuoglu, H.R.; Ermis, M. 3-D path planning for the navigation of unmanned aerial vehicles by using evolutionary algorithms. In Proceedings of the 10th Annual Conference on Genetic and Evolutionary Computation, Atlanta, GA, USA, 12–16 July 2008; pp. 1499–1506. [Google Scholar]
- Kroumov, V.; Yu, J.; Shibayama, K. 3D path planning for mobile robots using simulated annealing neural network. Int. J. Innov. Comput. Inf. Control 2010, 6, 2885–2899. [Google Scholar]
- Scholer, F.; la Cour-Harbo, A. Generating approximative minimum length paths in 3D for UAVs. In Proceedings of the IEEE Intelligent Vehicles Symposium, Madrid, Spain, 3–7 June 2012; pp. 229–233.
- Pehlivanoglu, Y.V.; Baysal, O.; Hacioglu, A. Path planning for autonomous UAV via vibrational genetic algorithm. Aircr. Eng. Aerosp. Technol. Int. J. 2007, 79, 352–359. [Google Scholar] [CrossRef]
- Shahidi, N.; Esmaeilzadeh, H.; Abdollahi, M. Memetic Algorithm Based Path Planning for a Mobile Robot. In Proceedings of the International Conference on Computational Intelligence, Istanbul, Turkey, 17–19 December 2004; pp. 56–59. [Google Scholar]
- Foo, J.L.; Knutzon, J.; Kalivarapu, V. Path planning of unmanned aerial vehicles using B-splines and particle swarm optimization. J. Aerosp. Comput. Inf. Commun. 2009, 6, 271–290. [Google Scholar] [CrossRef]
- Cheng, C.T.; Fallahi, K.; Leung, H. Cooperative path planner for UAVs using ACO algorithm with Gaussian distribution functions. In Proceedings of the IEEE International Symposium on Circuits and Systems, ISCAS, Taipei, Taiwan, 24–27 May 2009; pp. 173–176. [Google Scholar]
- Xi, J.; Li, S.; Sheng, J.; Zhang, Y.; Cui, Y. Application of Improved Particle Swarm Optimization for Navigation of Unmanned Surface Vehicles. Sensors 2019, 19, 3096. [Google Scholar]
- Li, Y.; Chen, H.; Meng, J.E. Coverage path planning for UAVs based on enhanced exact cellular decomposition method. Mechatronics 2011, 21, 876–885. [Google Scholar] [CrossRef]
- Peng, H.; Shen, L.C.; Huo, X.H. Research on Multiple UAV Cooperative Area Coverage Searching. J. Syst. Simul. 2007, 19, 2472–2476. (In Chinese) [Google Scholar]
- Wu, Q.P.; Zhou, S.L.; Yin, G.Y. Improvement of Multi-UAV Cooperative Coverage Searching Method. Electron. Opt. Control 2016, 23, 80–84. [Google Scholar]
- Guo, Y.; Qu, Z. Coverage control for a mobile robot patrolling a dynamic and uncertain environment. In Proceedings of the Fifth World Congress on Intelligent Control and Automation, WCICA 2004, Hangzhou, China, 15–19 June 2004; Volume 6, pp. 4899–4903. [Google Scholar]
- Araujo, J.F.; Sujit, P.B.; Sousa, J.B. Multiple UAV area decomposition and coverage. In Proceedings of the Computational Intelligence for Security and Defense Applications (CISDA), Singapore, 16–19 April 2013; pp. 30–37. [Google Scholar]
- Xuan, Y.B.; Huang, C.Q.; Wu, W.C. Coverage search strategies for moving targets using multiple unmanned aerial vehicle teams. Syst. Eng. Electron. 2013, 35, 539–544. [Google Scholar]
- Belkadi, A.; Ciarletta, L.; Theilliol, D. UAVs team flight training based on a virtual leader: Application to a fleet of Quadrotors. In Proceedings of the 2015 International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015; pp. 1364–1369. [Google Scholar]
- Belkadi, A.; Ciarletta, L.; Theilliol, D. UAVs fleet control design using distributed particle swarm optimization: A leaderless approach. In Proceedings of the 2016 International Conference on Unmanned Aircraft Systems (ICUAS), Arlington, VA, USA, 7–10 June 2016; pp. 364–371. [Google Scholar]
- Belkadi, A.; Abaunza, H.; Ciarletta, L.; Castillo, P.; Theilliol, D. Distributed Path Planning for Controlling a Fleet of UAVs: Application to a Team of Quadrotors * *Research supported by the Conseil Regional de Lorraine, the Ministére de L’Education Nationale, de l’Enseignement Supérieur et de La Recherche, and the National Network of Robotics Platforms (ROBOTEX), from France. IFAC-Pap. OnLine 2017, 50, 15983–15989. [Google Scholar] [CrossRef]
- Belkadi, A.; Abaunza, H.; Ciarletta, L.; Castillo, P.; Theilliol, D. Design and Implementation of Distributed Path Planning Algorithm for a Fleet of UAVs. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 2647–2657. [Google Scholar] [CrossRef]
- Golzari, S.; Zardehsavar, M.N.; Mousavi, A.; Saybani, M.R.; Khalili, A.; Shamshirband, S. KGSA: A Gravitational Search Algorithm for Multimodal Optimization based on K-Means Niching Technique and a Novel Elitism Strategy. Open Math. 2018, 16, 1582–1606. [Google Scholar] [CrossRef] [Green Version]
- Zheng, C.; Li, L.; Xu, F.; Sun, F.; Ding, M. Evolutionary route planner for unmanned air vehicles. IEEE Trans. Robot. 2005, 21, 609–620. [Google Scholar] [CrossRef]
- Cabreira, T.; Brisolara, L.; Ferreira, P., Jr. Survey on coverage path planning with unmanned aerial vehicles. Drones 2019, 3, 4. [Google Scholar] [CrossRef] [Green Version]
- Noonan, A.; Schinstock, D.; Lewis, C.; Spletzer, B. Optimal Turning Path Generation for Unmanned Aerial Vehicles (No. SAND2007-3152C); Sandia National Lab. (SNL-NM): Albuquerque, NM, USA, 2007. [Google Scholar]
- Bresenham, J.E. Algorithm for computer control of a digital plotter. IBM Syst. J. 1965, 4, 25–30. [Google Scholar] [CrossRef]
- Koopman, P., Jr. Bresenham Line-Drawing Algorithm; Fourth Dimension: North Kingstown, RI, USA, 1987; pp. 12–16. [Google Scholar]
- Rashid, A.T.; Ali, A.A.; Frasca, M.; Fortuna, L. Path planning with obstacle avoidance based on visibility binary tree algorithm. Robot. Auton. Syst. 2013, 61, 1440–1449. [Google Scholar] [CrossRef]
- Roberge, V.; Tarbouchi, M.; Labonte, G. Comparison of parallel genetic algorithm and particle swarm optimization for real-time UAV path planning. IEEE Trans. Ind. Inf. 2013, 9, 132–141. [Google Scholar] [CrossRef]
- Jordehi, A.R.; Jasni, J. Parameter selection in particle swarm optimization: A survey. J. Exp. Theor. Artif. Intell. 2012, 25, 527–542. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Objective Function | ||||||
| Name | Energy Consumption | Flight Risk Estimation | Surveillance Area Importance | |||
| Abbreviation | EC | FRE | SAI | |||
| Equation | (5)–(10) | (11)–(14) | (15)–(17) | |||
| Value/Range | [0, 1] | [0, 1] | [0, 1] | |||
| Constraint Function | ||||||
| Name | Aerial Constraint | Restricted Area Constraint | Turning Angle Constraint | Operational Area Constraint | Coverage Range Constraint | Collision Avoidance |
| Abbreviation | AC | RAC | TAC | OAC | CRC | CA |
| Equation | (19) | (20) | (21) | (22) | (23) | (24) |
| Value/Range | 0 | 0 | 0 | 0 | 0 | 0 |
| Parameters | Symbols | Values |
|---|---|---|
| Grid Side (2-D environment) | - | 2020 |
| Operational Space (3-D environment) | - | |
| Number of drones | ND | 4 |
| Drone unit power | Pw | 20 |
| Monitoring drone speed | v | 10 m/s |
| Number of particles | Npar | 32, 64, 128, 150, 256, 512 |
| Number of iterations | Niter | 100 |
| Minimum safe distance | dmin | 0.2 m |
| Initial SAI value | 4 to 10 | |
| Initial environment risk | 1–5 |
| Parameter Name | Conventional PSO | PSO with Modified Parameters (mPSO) |
|---|---|---|
| Inertia value | 0.7298 | 0.8 |
| Personal Cognitive value | 1.4960 | 2.0 |
| Social Cognitive value | 1.4960 | 2.0 |
| Weight Value | Energy Consumption | Flight Risk Estimation | Surveillance Area Importance | Objective Value |
|---|---|---|---|---|
| 1 | −0.3619 | −0.6356 | 0.4597 | −0.5978 |
| 2 | −0.3577 | −0.6186 | 0.9096 | −0.0567 |
| 3 | −0.3478 | −0.5939 | 1.6792 | 0.7178 |
| 4 | −0.3789 | −0.5705 | 2.2389 | 1.2775 |
| 5 | −0.3652 | −0.5937 | 2.7986 | 1.8297 |
| 6 | −0.3580 | −0.5655 | 3.3583 | 2.3848 |
| No. of Waypoints | Altitude (Meter) | |||
|---|---|---|---|---|
| UAV1 | UAV2 | UAV3 | UAV4 | |
| 1 | 0.4827 | 0.4792 | 0.3403 | 0.5184 |
| 2 | 1.3508 | 0.3393 | 1.3211 | 0.8365 |
| 3 | 1.1563 | 0.9815 | 1.2727 | 0.4283 |
| 4 | 1.3724 | 0.2747 | 1.1685 | 0.9781 |
| 5 | 0.8549 | 0.8525 | 1.3761 | 0.0475 |
| 6 | 0.8316 | 0.1218 | 0.8848 | 0.1951 |
| 7 | 0.8528 | 0.0602 | 1.0310 | 0.5889 |
| 8 | 0.5366 | 0.5191 | 0.4815 | 0.5165 |
| UAV Number | Distance Covered in 2-D (Meter) | Time Required for 2-D (Second) | Distance Covered in 3-D (Meter) | Time Required for 3-D (Second) |
|---|---|---|---|---|
| 1 | 3,152 | 315.2 | 3,159 | 315.9 |
| 2 | 3,155 | 315.5 | 3,164 | 316.4 |
| 3 | 3,184 | 318.4 | 3,195 | 319.5 |
| 4 | 3,052 | 305.2 | 3,056 | 305.6 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ahmed, N.; Pawase, C.J.; Chang, K. Distributed 3-D Path Planning for Multi-UAVs with Full Area Surveillance Based on Particle Swarm Optimization. Appl. Sci. 2021, 11, 3417. https://doi.org/10.3390/app11083417
Ahmed N, Pawase CJ, Chang K. Distributed 3-D Path Planning for Multi-UAVs with Full Area Surveillance Based on Particle Swarm Optimization. Applied Sciences. 2021; 11(8):3417. https://doi.org/10.3390/app11083417
Chicago/Turabian StyleAhmed, Nafis, Chaitali J. Pawase, and KyungHi Chang. 2021. "Distributed 3-D Path Planning for Multi-UAVs with Full Area Surveillance Based on Particle Swarm Optimization" Applied Sciences 11, no. 8: 3417. https://doi.org/10.3390/app11083417
APA StyleAhmed, N., Pawase, C. J., & Chang, K. (2021). Distributed 3-D Path Planning for Multi-UAVs with Full Area Surveillance Based on Particle Swarm Optimization. Applied Sciences, 11(8), 3417. https://doi.org/10.3390/app11083417