
GNSS-Free Outdoor Localization Techniques for Resource-Constrained IoT Architectures: A Literature Review

 , , ,
, , ,  and
and 
Abstract
:1. Introduction
- Definition of the main requirements and limitations of outdoor localization for the IoT ecosystem, having in mind the following application domains: smart healthcare; smart transportation; smart cities; smart manufacturing.
- Review of the most relevant GNSS-free outdoor localization methods, with a focus on LPWAN technologies and their relationship with the newly 5G mobile network architectures;
- Review of the most relevant methods for improving the localization accuracy in the IoT ecosystem.
- Discussion on open challenges and future directions in the field.
2. Outdoor Positioning in the IoT Ecosystem
2.1. Why IoT Location Matters?
2.2. Application-Specific IoT Requirements
- Security and Privacy: Long-range communication protocols provide connectivity for IoT systems and IoT systems provide information about the system, environment, and people. The information which is collected by IoT and IoT communication signals in LPWAN should be sent securely, otherwise, it can lead to security (disclose sensitive information about environment) and privacy problems (potentially disclose end-node location). Poor authentication and encryption methods can lead to end-node privacy violence [15].To provide a secure localization system, it is important to consider privacy and security requirements in each step of architecture. With the release of General Data Protection Regulation (GDPR), authors in [16] present an appropriate privacy-by-design to guarantee the GDPR compliance through the integration of a specialized GDPR-based access control system.
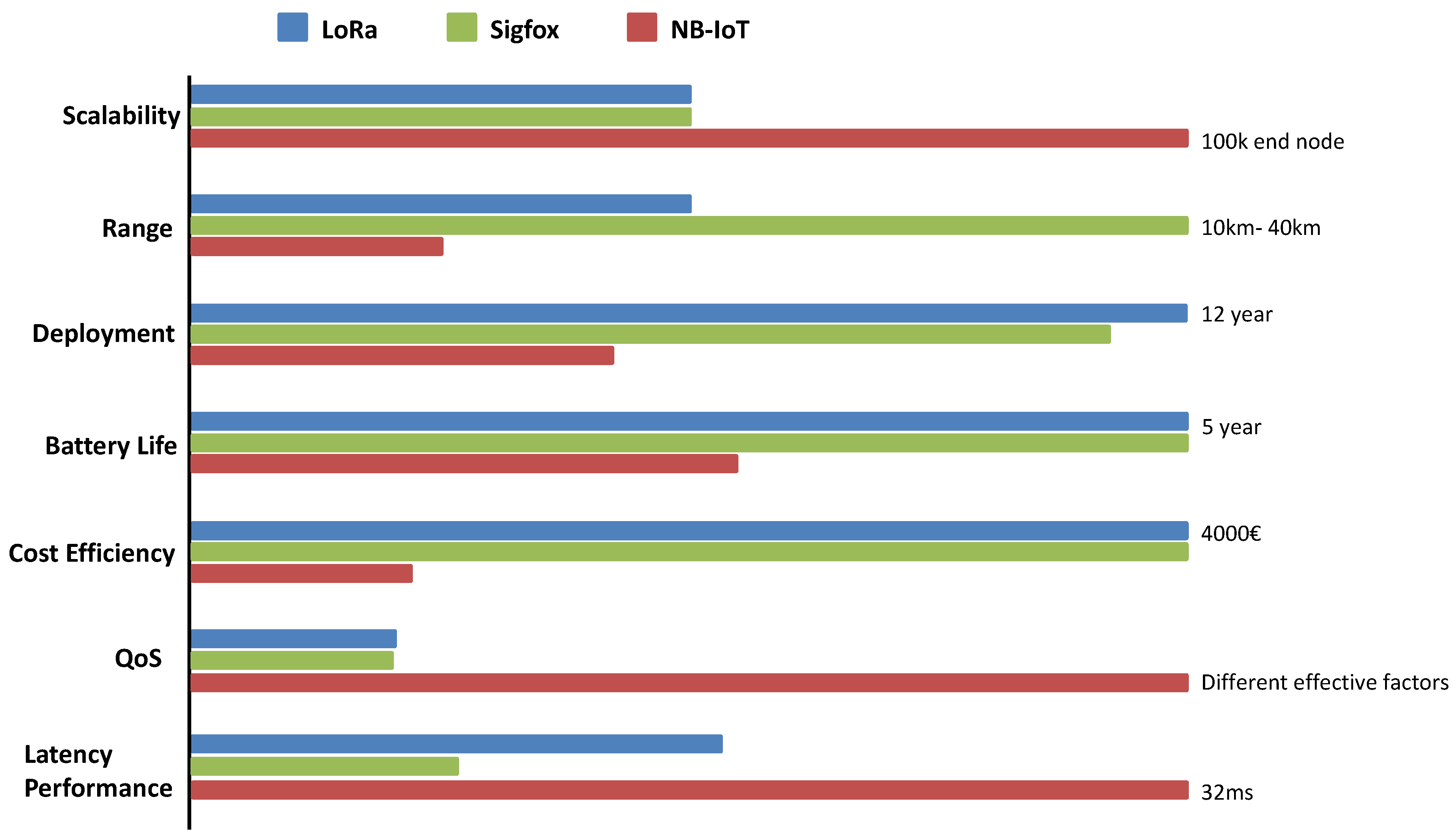
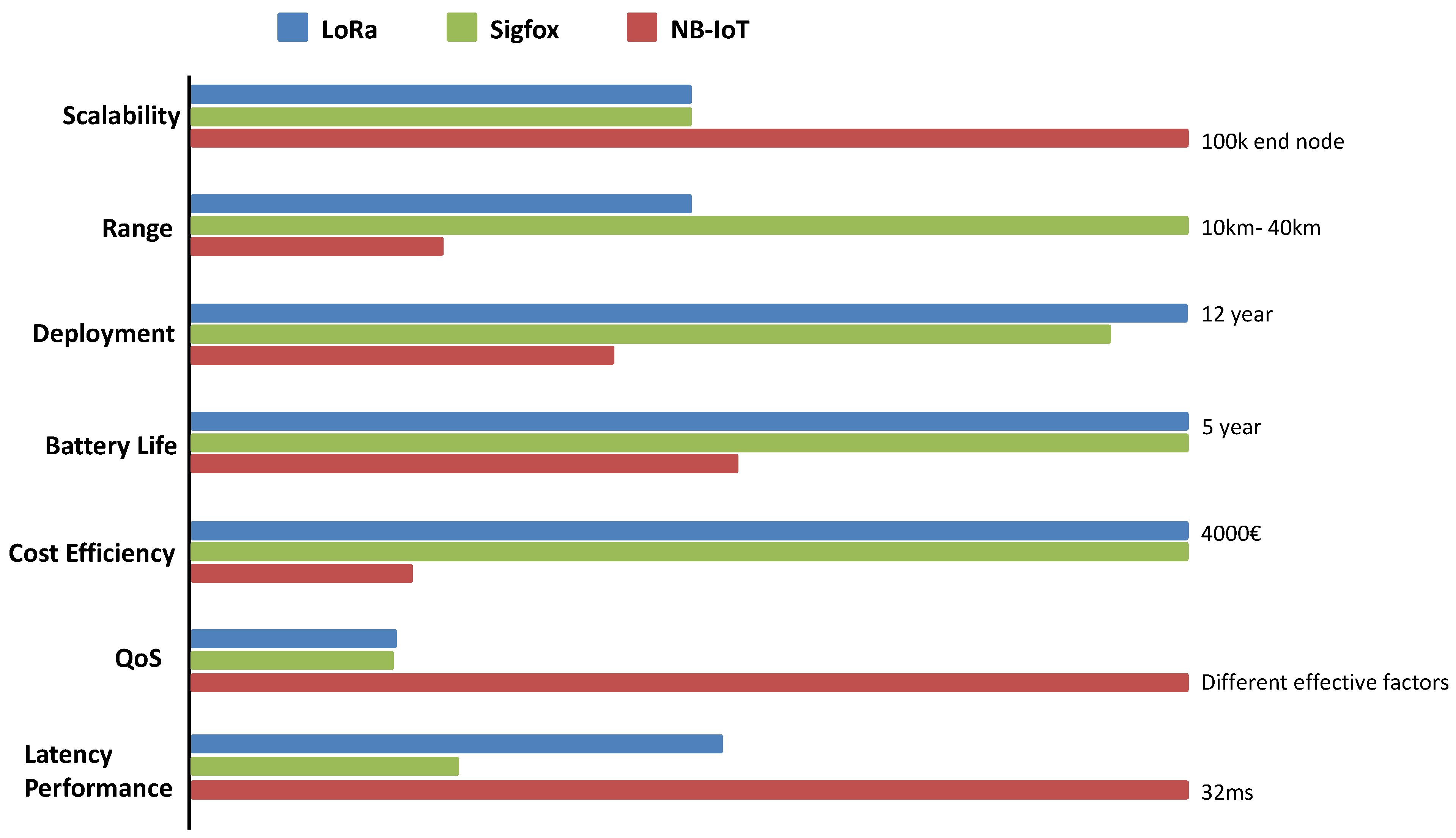
- Coverage Range: Different IoT systems work in different environment situations (for example, the smart industry has a harsh environment). LPWANs (LoRaWAN, Sigfox, and NB-IoT) has different coverage range and function in different situations. As a result, the efficiency and coverage range of the different LPWAN technologies can be varied in different systems. Therefore, a network technology should be compatible with the environmental situation and required range.
- Energy Consumption: Energy Consumption is one of the most important issues in IoT systems. IoT systems are embedded in different environments for an important purpose. Therefore, long battery life and the low energy consumption is a fundamental point for these systems. One of the important aspects to decrease energy consumption is multiple cheap network interfaces adoption such as Bluetooth, Wi-Fi, and LPWAN for short- and long-range positioning. In this case, end nodes look for nearby localization systems with the short-range network interfaces and, eventually, switch to a long-range search [17]. The authors in [18] try to standardize Application Programming Interfaces (APIs) designed to discover, access, and localize end nodes.
- Latency: low latency in some IoT categories is an essential priority because of the hard real-time limitations. In these cases, adopted LPWAN technology should provide services with specific maximum latency.
- Deployment: NB-IoT is a new emerging technology while LoRaWAN and Sigfox ecosystems are mature communication technology. Additionally, we need to choose the best LPWAN technology based on our system (local or public network).
- Accuracy: IoT systems can be divided into two categories based on required location accuracy: high accuracy and low accuracy. smart healthcare and smart factory need high accuracy based on their direct interaction with human safety. Smart cities and smart transportation need accuracies in the meter level. Therefore, the localization error rate of the adopted LPWAN method should be acceptable in the system.
- Scalability: LPWAN technologies are supposed to cover a wide-area environment. In different systems, a wide-area environment can contain many nodes that need to communicate throw a network and share the communication medium. For this reason, different technologies provide a range of communication options to handle network load to provide a scalable network. Therefore, the scalable of adopted technology should be acceptable for the system [19].
2.3. Location-Enabled IoT Technologies
2.3.1. LoRaWAN
- Channel: LoRaWAN works in license-free channel of 433 and 868 MHZ (in Europe), 915 MHZ (in US), and 430 MHZ (in AS) [23]. Lower Carrier Frequency leads to lower path loss. Therefore, Lower Carrier Frequency can be useful in long-distance. On the other hand, antenna dimensions at Lower Carrier Frequency should be bigger for a stated radiation efficiency. It leads to inefficiency for IoT systems with size limitations. In addition, a narrower Carrier Frequency leads to a lower number of communication channels. As a result, it is not suitable for systems with many users.
- Spreading Factor (SF): Spreading technique leads to extend a symbol to a longer sequence of bits. This technique reduced the signal-to-noise and interference ratio. In LoRaWAN, symbols are encoded using several chirps. The number of chirps is determined by the spreading factor. SF in LoRaWAN can range from 7 to 12. Therefore, SF7 means that each chirp represents seven bits. According to the explanations, SF12 has the lowest data rate and highest energy consumption but it has the highest resilience against noise, interference, and other unpredictable time-varying impairments because of user mobility. Therefore, SF12 is useful for IoT systems that work in dynamic and harsh environments and SF7 is useful for IoT systems with power limitations.
- Bandwidth (BW): Bandwidth measures the amount of data that can be transmitted per unit of time. The duration of each chip is equal to . Therefore, the symbol duration () is equal to . As a result, by increasing the BW, symbol duration and chirp duration would change accordingly which leads to a better Signal-to-Noise Ratio (SNR). Bandwidth in LoRaWAN can range from 7.8 kHz to 500 kHz.
- Transmission Power (TX-PoW): TX-Pow determines the direct amount of power used to transmit a chirp. By increasing TX-PoW, the probability of signal resistance versus channel fading increases too and there will be more chances for correct transmission of data. The LoRaMAC layer provides the medium access control mechanism. LoRaWAN has a star topology. Therefore, end nodes in LoRaWAN can only communicate with LoRaWAN gateways. For communication and data transmission, end nodes must join to network and their connection is allowed by the LoRaWAN network server. By allowing a LoRaWAN network server, end nodes will earn a set of parameters that are necessary to operate in a LoRaWAN. End nodes can join the network in two ways: Over-The-Air Activation and Activation by personalization [24]. In Over-The-Air Activation, the end nodes are identified with an end-device identifier, application identifier, and AppKey. In Activation by personalization, end nodes have two keys determined by the LoRaWAN network server as session keys. Therefore, in this way, the end nodes directly join the network without going through the Join procedure steps. After Joining the LoRaWAN network, end nodes can exchange data with the LoRaWAN network server throw LoRaWAN gateways. LoRaWAN defines three classes of end devices: Class A, Class B, and Class C [25].
- −
- Class A: when an end node needs to send data (Uplink), it selects a channel randomly. Then, end nodes send packets through the ALOHA technique. To enable bidirectional communication, Uplink transmission is followed by to short packet from the LoRaWAN network server (Downlink). Class A is useful for IoT devices with power limitations and low downlink data because the end node will be in sleep mode most of the time.
- −
- Class B: this class is useful for IoT devices with more downlink data and power limitations. The uplink transmission is the same as class A, but end nodes will open additional receive windows at scheduled times to receive downlink transmission. End node and LoRaWAN gateway establish a parameter. This parameter is used to calculate the ping slot. Throw ping slot determination, end device knows times that must wake up and wait for a downlink. Additionally, the server knows when end nodes are listening to the medium.
- −
- Class C: this class is not useful for devices with power limitation. In this class, IoT devices are continuously listening to the channel and are open for downlink transmission.
2.3.2. Sigfox
2.3.3. NB-IoT
2.3.4. LTE-M
2.3.5. 5G
2.4. Common LoRaWAN-Based Localization Architectures
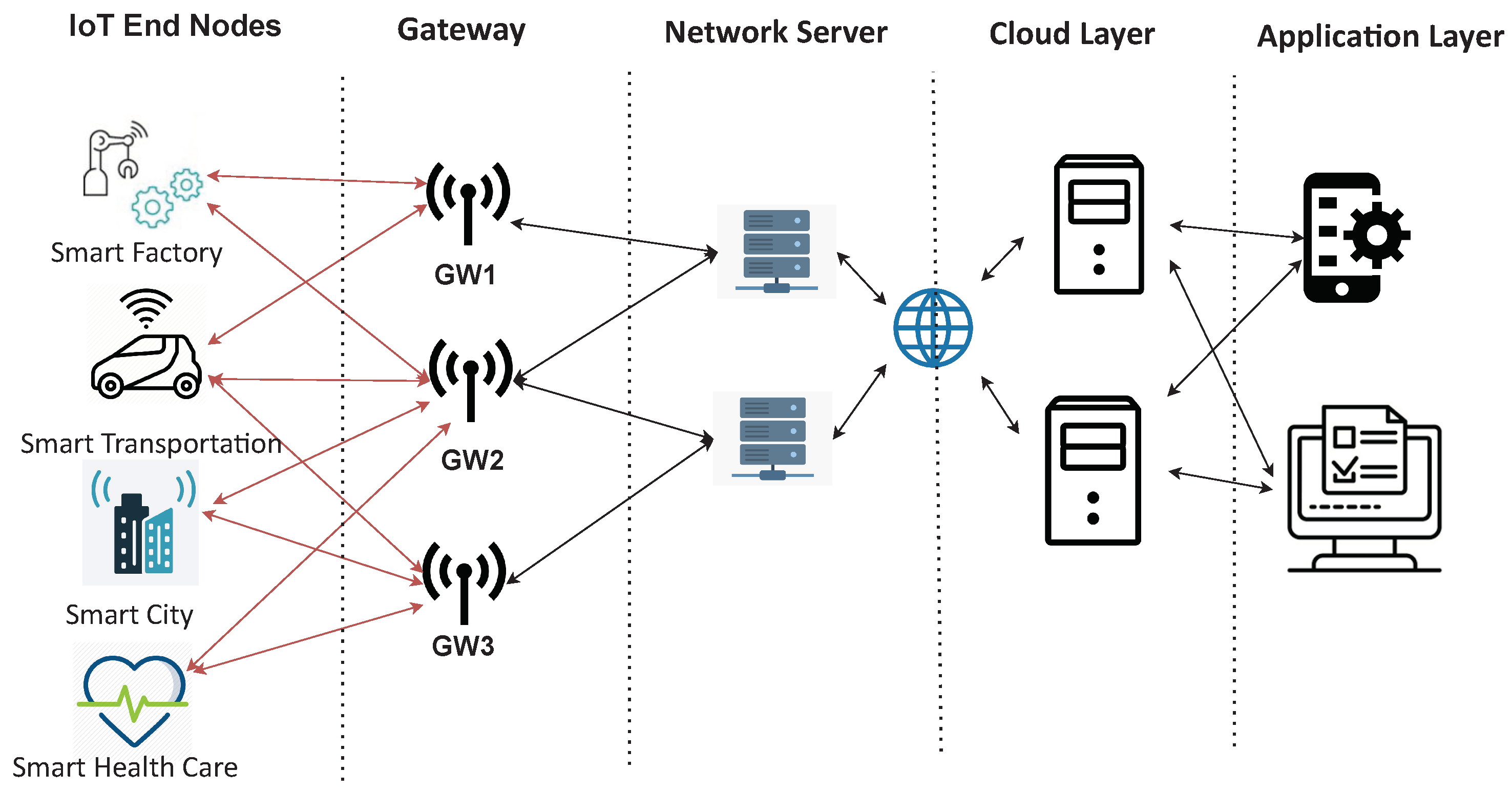
2.4.1. Central Architecture (Cloud-Based)
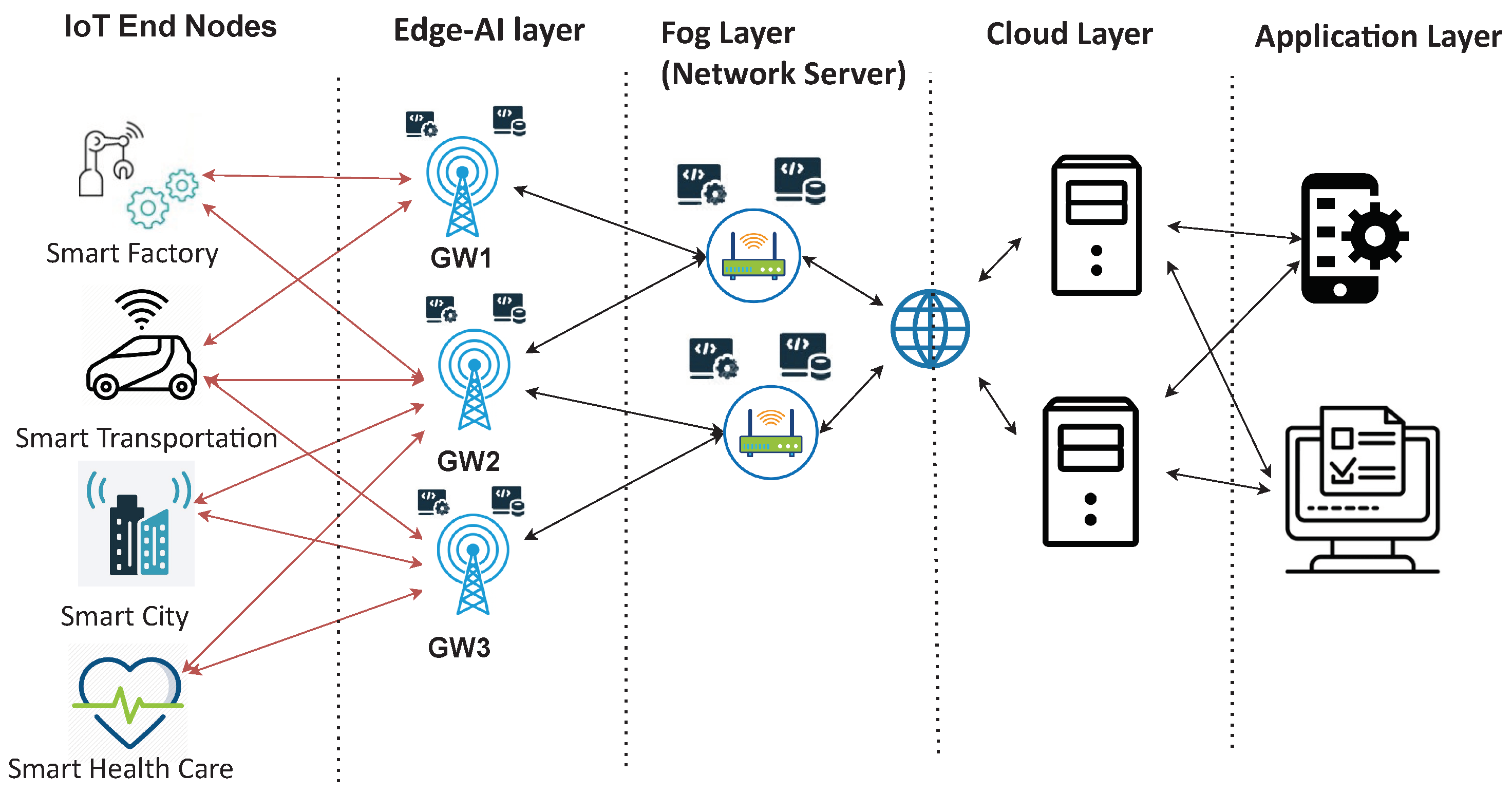
2.4.2. Distributed Architecture (Fog and Edge-AI Based)
3. GNSS-Free IoT Localization Methods
3.1. Signal-Based Localization Methods
- Received Signal Strength Indicator (RSSI): RSSI is the simplest and widely used method that uses received signal power for end-node localization. For doing this, a path-loss model should be developed for the system. The path-loss model specifies the signal propagation model of the system. The signal propagation model determines the signal strength at increasing distances [41].There are different kinds of propagation models including Line Of Sight (LOS), Two-Ray (2R), Nakagami-m, gamma distribution, and log-normal, etc. In the simplest model, a free space between transmitting and receiving antennas is considered. Therefore, only a LOS propagation path is present between transmitter and receiver antennas. In this system, the only disturbance is atmospheric effects and path loss is a function of distance between them. In more usual systems, communication between transmitter and receiver takes place closer to the earth surface. Therefore, the LOS model is extended to incorporate the effect of the ground-reflected signal. That means, in the 2R model, the path-loss characteristics in LOS environments are dominated by interference between the direct path and the ground-reflected path [18].In a more realistic system, the transmitted signal is obstructed by buildings, mountains, and foliage several times and a combination of these signals is received. Received signal strength in multipath propagation at the receiver can be characterized based on two different scales (large scale and small scale). Large-scale fading is due to motion in a large area, and small-scale fading is due to small changes in position or to changes in the environment [42]. To model these two different scales of multipath propagation, different probability distributions are presented (e.g., Nakagami-m, gamma distribution, log-normal). As most of the IoT systems have small changes in position or in the environment (smart healthcare, smart manufacturing, and most applications in smart city), in this paper we focused on small-scale fading to model the signal propagation.The log-normal model or log-distance path-loss model is the most commonly used method to model small-scale fading. In this model, when the LoRaWAN network server receives a signal from the end node, it can measure transmitter distance by Equation (1).where n is the path-loss exponent and A is the RSSI value at a reference distance (1 m) from the receiver. The ground reflection model is another commonly used propagation model. The ground reflection model considers the ground reflection propagation path between transmitter and receiver in addition to the direct path [43]. RSSI is easily affected by the propagation environment, absorption and scattering, and antenna effects including impedance mismatch and polarization mismatch [44]. In addition, RSSI is highly dependent on changes in environmental and weather conditions, which may lead to location accuracy reduction. On the other hand, RSSI is cost-effective and it does not need extra equipment.
- Time of Arrival or Time on Air (ToA): ToA is the time that transmitted signal takes to reach the receiver and the ToA of a packet is dependent on CR, SF, and BW. ToA can be used for distance estimation by multiplying the speed of light. There are two categories of ToA: one-way and two-way ToA [45]. In one-way ToA, the distance is computed based on one-way signal transmission between transmitter and receiver. In this case, ToA requires strict synchronization or timestamps to be transmitted with the signal. In two-way ToA, ToA is computed from roundtrip communications between transmitter and receiver. Two-way ToA is an asynchronous procedure, thus involved clocks do not need to be precisely synchronized.
- Time Difference of Arrival (TDoA): unlike ToA, TDoA needs three or more GWs with only precise time synchronization between GWs for end-node localization. When an end node in location (x,y) transmits a message, the message is received by gateways with different timestamps . Then, differences in signals propagation times is measured at the receiver for physical distance computation by Equation (2).
- Angle of Arrival (AoA): In the AoA method, an array of antennas is implemented at the receiver side to estimate the angle between transceiver and receiver. For doing this, the time difference of transmitted signal at individual elements of the antennas array is computed. The AoA method is not dependent on signal strength for location estimation. Therefore, channel fading and environment features have minimal effect on location estimation accuracy. In addition, AoA can decompose the received signals into direct and reflected paths, thus, the multipath effect can be minimized [46]. AoA has a high deployment cost, and it needs careful calibration. A low error in angle computation can lead to huge error in location estimation.As TDoA work with propagation time, it is dependent on CR, SF, and BW of the system same as ToA.
3.2. Learning-Based Localization Methods
- Path-Loss Modeling: When a signal travels from the transmitter to receiver over a distance d, path loss or propagation loss leads to received signal power decrements. By correct determination of system path-loss model, location estimation accuracy improved. The path-loss model of the signal can change based on the environment. For path-loss model determination, the ML method needs collected data of experiment environment under different situations by Equation (3).where is the transmission power, and are the gains of the transmitting and receiving antenna, respectively. By large enough number of and measurements as input of ML, correct determination of system path-loss model as ML output can be achieved. Free space, indoor and urban path-loss models are more usual defined path-loss models [48]. The authors in [49] studies the propagation of LoRaWAN signals in forest, urban, and suburban vehicular environments.
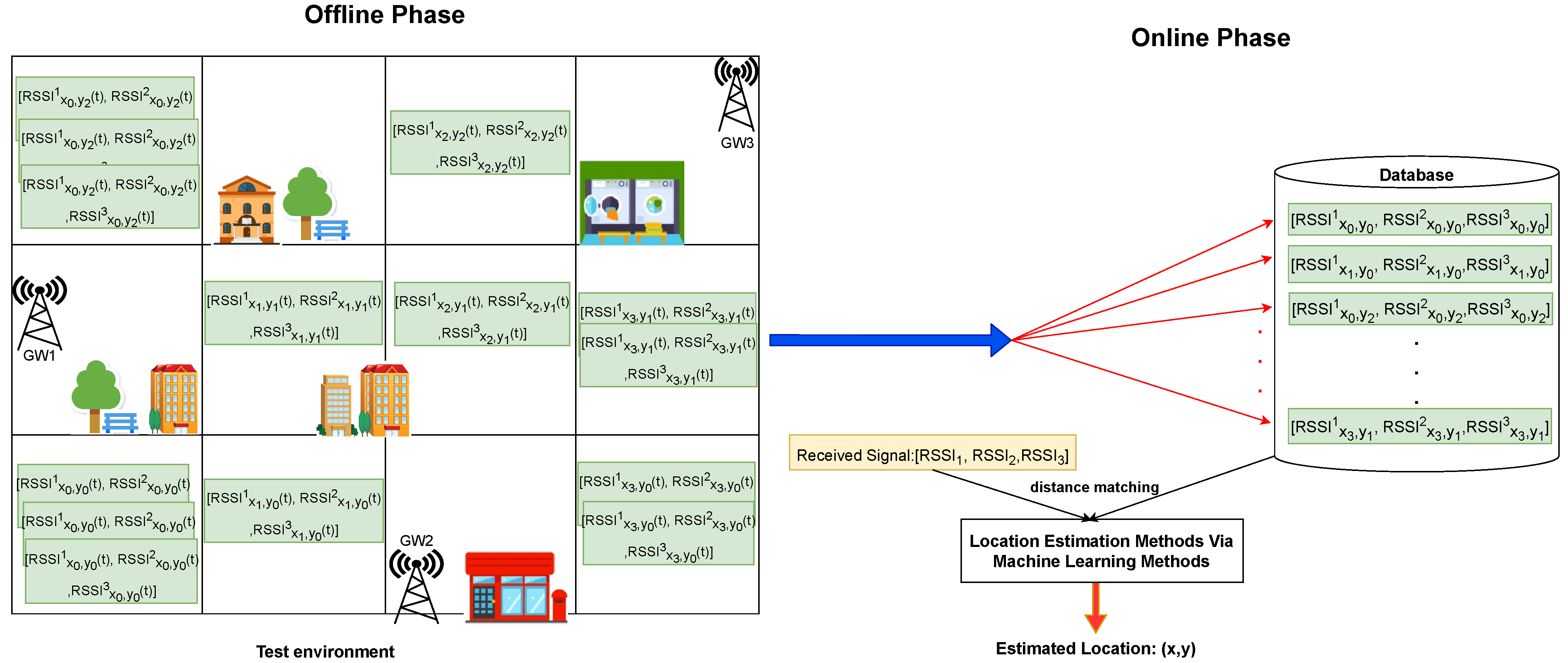
- Fingerprinting/Scene Analysis: The purpose of the fingerprinting method is to find the location of an end node by comparing its signal characterizes received from multiple GWs with a stored signal characterizes. For example, RSSI fingerprinting-based localization method has two phases: offline and online phase. In the offline phase, the characteristics of signals for specific locations (x,y) are collected and stored according to Equation (4).where N is the number of gateways and t is the time that signal is collected by gateways. In the online phase, the distance matching of received signal characterizes with stored data is used for location estimation. Distance matching indicates how close a fingerprint at one reference location to the received fingerprint at an unknown location [50]. The fingerprint process is shown in Figure 4.
- Proximity Analysis: In this category, service provider do not need precise location information of end user. Distance between two end user is the purpose of Proximity Analysis. This analysis is useful in smart factories [51].
3.3. Localization Accuracy Improvement Methods
4. LoRaWAN-Based Outdoor Positioning in Application-Specific IoT Domains
4.1. Smart Manufacture (Industry 4.0)
Localization Methods in Industry 4.0
4.2. Smart Healthcare
Localization Methods in Smart Healthcare
4.3. Smart Transportation (Intelligent Transportation)
Localization Methods in Smart Transportation
4.4. Smart City
Localization Methods in Smart City
4.5. Comparative Analysis and Discussion
5. Conclusions
- Energy Consumption: it is an important limitation in IoT-based systems. The main portion of energy consumption is related to connectivity, typically during the data transmission periods. To decrease data transmission, resource-aware and context-aware solutions are becoming an attractive subject for researchers [137].
- Security and Privacy: LPWAN technologies contain important security and safety vulnerabilities Ṫhese vulnerabilities are exploited by malicious entities and lead to great damages. This becomes more important in some IoT categories (Industry 4.0, smart city) and it is a drawback. Therefore, providing a reliable security mechanism based on their limitations is a challenging and open issue task [15,138].
- Accuracy: there are different methods for accuracy improvement in positioning methods, but outdoor localization for resource-constrained IoT devices is still an open issue. Several IoT-based systems deployed in different environments have different error sources that should be considered to improve localization accuracy [39].
- Scalability: by increasing device density, for example, the scalability of a LoRaWAN network becomes a challenging issue. This is more important in a smart city application domain, which typically presents a dynamic and large number of end devices. Moreover, the scalability of a LoRaWAN network can be affected by different factors including co-SF interference, inter-SF interference, and the class selected during the design and implementation of the end nodes [139].
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Figueiredo e Silva, P.; Kaseva, V.; Lohan, E.S. Wireless positioning in IoT: A look at current and future trends. Sensors 2018, 18, 2470. [Google Scholar] [CrossRef] [Green Version]
- Lohan, E.S.; Koivisto, M.; Galinina, O.; Andreev, S.; Tolli, A.; Destino, G.; Costa, M.; Leppanen, K.; Koucheryavy, Y.; Valkama, M. Benefits of positioning-aided communication technology in high-frequency industrial IoT. IEEE Commun. Mag. 2018, 56, 142–148. [Google Scholar] [CrossRef]
- Kuutti, S.; Fallah, S.; Katsaros, K.; Dianati, M.; Mccullough, F.; Mouzakitis, A. A survey of the state-of-the-art localization techniques and their potentials for autonomous vehicle applications. IEEE Internet Things J. 2018, 5, 829–846. [Google Scholar] [CrossRef]
- Shit, R.C.; Sharma, S.; Puthal, D.; Zomaya, A.Y. Location of Things (LoT): A review and taxonomy of sensors localization in IoT infrastructure. IEEE Commun. Surv. Tutor. 2018, 20, 2028–2061. [Google Scholar] [CrossRef]
- Shafique, K.; Khawaja, B.A.; Sabir, F.; Qazi, S.; Mustaqim, M. Internet of things (IoT) for next-generation smart systems: A review of current challenges, future trends and prospects for emerging 5G-IoT scenarios. IEEE Access 2020, 8, 23022–23040. [Google Scholar] [CrossRef]
- Tian, S.; Yang, W.; Le Grange, J.M.; Wang, P.; Huang, W.; Ye, Z. Smart healthcare: Making medical care more intelligent. Glob. Health J. 2019, 3, 62–65. [Google Scholar] [CrossRef]
- Barsocchi, P.; Chessa, S.; Furfari, F.; Potorti, F. Evaluating ambient assisted living solutions: The localization competition. IEEE Pervasive Comput. 2013, 12, 72–79. [Google Scholar] [CrossRef]
- Yang, Z.; Pun-Cheng, L.S. Vehicle detection in intelligent transportation systems and its applications under varying environments: A review. Image Vis. Comput. 2018, 69, 143–154. [Google Scholar] [CrossRef]
- Andrade, R.O.; Yoo, S.G. A comprehensive study of the use of LoRa in the development of smart cities. Appl. Sci. 2019, 9, 4753. [Google Scholar] [CrossRef] [Green Version]
- Thoben, K.D.; Wiesner, S.; Wuest, T. “Industrie 4.0” and smart manufacturing-a review of research issues and application examples. Int. J. Autom. Technol. 2017, 11, 4–16. [Google Scholar] [CrossRef] [Green Version]
- Torres, N.; Martins, P.; Pinto, P.; Lopes, S.I. Smart & Sustainable Mobility on Campus: A secure IoT tracking system for the BIRA Bicycle. In Proceedings of the 2021 16th Iberian Conference on Information Systems and Technologies (CISTI), Chaves, Portugal, 23–26 June 2021; pp. 1–7. [Google Scholar] [CrossRef]
- Chaojie, G.; Jiang, L.; Tan, R. Lora-based localization: Opportunities and challenges. arXiv 2018, arXiv:1812.11481. [Google Scholar]
- Naik, N. LPWAN technologies for IoT systems: Choice between ultra narrow band and spread spectrum. In Proceedings of the 2018 IEEE International Systems Engineering Symposium (ISSE), Rome, Italy, 1–3 October 2018; pp. 1–8. [Google Scholar]
- Pereira, F.; Correia, R.; Pinho, P.; Lopes, S.I.; Carvalho, N.B. Challenges in Resource-Constrained IoT Devices: Energy and Communication as Critical Success Factors for Future IoT Deployment. Sensors 2020, 20, 6420. [Google Scholar] [CrossRef] [PubMed]
- Torres, N.; Pinto, P.; Lopes, S.I. Security Vulnerabilities in LPWANs—An Attack Vector Analysis for the IoT Ecosystem. Appl. Sci. 2021, 11, 3176. [Google Scholar] [CrossRef]
- Barsocchi, P.; Calabrò, A.; Crivello, A.; Daoudagh, S.; Furfari, F.; Girolami, M.; Marchetti, E. A Privacy-by-Design Architecture for Indoor Localization Systems. In International Conference on the Quality of Information and Communications Technology; Springer: Faro, Portugal, 2020; pp. 358–366. [Google Scholar]
- Furfari, F.; Crivello, A.; Baronti, P.; Barsocchi, P.; Girolami, M.; Palumbo, F.; Quezada-Gaibor, D.; Silva, G.M.M.; Torres-Sospedra, J. Discovering location based services: A unified approach for heterogeneous indoor localization systems. Internet Things 2021, 13, 100334. [Google Scholar] [CrossRef]
- Potorti, F.; Torres-Sospedra, J.; Quezada-Gaibor, D.; Jiménez, A.R.; Seco, F.; Pérez-Navarro, A.; Ortiz, M.; Zhu, N.; Renaudin, V.; Ichikari, R. Off-line Evaluation of Indoor Positioning Systems in Different Scenarios: The Experiences from IPIN 2020 Competition. IEEE Sens. J. 2021. [Google Scholar] [CrossRef]
- Bor, M.C.; Roedig, U.; Voigt, T.; Alonso, J.M. Do LoRa low-power wide-area networks scale? In Proceedings of the 19th ACM International Conference on Modeling, Analysis and Simulation of Wireless and Mobile Systems, Alicante, Spain, 13–17 November 2016; pp. 59–67. [Google Scholar]
- Whitening, S. Implementing Data Whitening and CRC Calculation in Software on SX12xx Devices. 2013. Available online: https://www.semtech.com/uploads/documents/AN1200.18_STD.pdf (accessed on 8 November 2021).
- Semtech, L. LoRa Modulation Basics; Technical Report. 2015. Available online: https://www.semtech.com/uploads/documents/an1200.22.pdf (accessed on 8 November 2021).
- Liando, J.C.; Gamage, A.; Tengourtius, A.W.; Li, M. Known and unknown facts of LoRa: Experiences from a large-scale measurement study. ACM Trans. Sens. Netw. (TOSN) 2019, 15, 1–35. [Google Scholar] [CrossRef]
- Aernouts, M.; Berkvens, R.; Van Vlaenderen, K.; Weyn, M. Sigfox and LoRaWAN datasets for fingerprint localization in large urban and rural areas. Data 2018, 3, 13. [Google Scholar] [CrossRef] [Green Version]
- El Fehri, C.; Kassab, M.; Abdellatif, S.; Berthou, P.; Belghith, A. LoRa technology MAC layer operations and Research issues. Procedia Comput. Sci. 2018, 130, 1096–1101. [Google Scholar] [CrossRef]
- Ertürk, M.A.; Aydın, M.A.; Büyükakkaşlar, M.T.; Evirgen, H. A survey on LoRaWAN architecture, protocol and technologies. Future Internet 2019, 11, 216. [Google Scholar] [CrossRef] [Green Version]
- Lavric, A.; Petrariu, A.I.; Popa, V. Long Range SigFox Communication Protocol Scalability Analysis Under Large-Scale, High-Density Conditions. IEEE Access 2019, 7, 35816–35825. [Google Scholar] [CrossRef]
- Mekki, K.; Bajic, E.; Chaxel, F.; Meyer, F. Overview of Cellular LPWAN Technologies for IoT Deployment: Sigfox, LoRaWAN, and NB-IoT. In Proceedings of the 2018 IEEE International Conference on Pervasive Computing and Communications Workshops (PerCom Workshops), Athens, Greece, 19–23 March 2018; pp. 197–202. [Google Scholar] [CrossRef]
- Gomez, C.; Veras, J.C.; Vidal, R.; Casals, L.; Paradells, J. A Sigfox Energy Consumption Model. Sensors 2019, 19, 681. [Google Scholar] [CrossRef] [Green Version]
- Aldahdouh, K.A.; Darabkh, K.A.; Al-Sit, W. A survey of 5G emerging wireless technologies featuring LoRaWAN, Sigfox, NB-IoT and LTE-M. In Proceedings of the 2019 International Conference on Wireless Communications Signal Processing and Networking (WiSPNET), Chennai, India, 21–23 March 2019; pp. 561–566. [Google Scholar]
- Kabalcı, Y.; Ali, M. Emerging LPWAN technologies for smart environments: An outlook. In Proceedings of the 2019 1st Global Power, Energy and Communication Conference (GPECOM), Nevsehir, Turkey, 12–15 June 2019; pp. 24–29. [Google Scholar]
- Lauridsen, M.; Kovács, I.Z.; Mogensen, P.; Sorensen, M.; Holst, S. Coverage and capacity analysis of LTE-M and NB-IoT in a rural area. In Proceedings of the 2016 IEEE 84th Vehicular Technology Conference (VTC-Fall), Montreal, QC, Canada, 18–21 September 2016; pp. 1–5. [Google Scholar]
- Li, Y.; Zhuang, Y.; Hu, X.; Gao, Z.; Hu, J.; Chen, L.; He, Z.; Pei, L.; Chen, K.; Wang, M. Toward location-enabled IoT (LE-IoT): IoT positioning techniques, error sources, and error mitigation. IEEE Internet Things J. 2020, 8, 4035–4062. [Google Scholar] [CrossRef]
- Yasmin, R.; Petäjäjärvi, J.; Mikhaylov, K.; Pouttu, A. On the integration of LoRaWAN with the 5G test network. In Proceedings of the 2017 IEEE 28th Annual International Symposium on Personal, Indoor, and Mobile Radio Communications (PIMRC), Montreal, QC, Canada, 8–13 October 2017; pp. 1–6. [Google Scholar]
- Mekki, K.; Bajic, E.; Chaxel, F.; Meyer, F. A comparative study of LPWAN technologies for large-scale IoT deployment. ICT Express 2019, 5, 1–7. [Google Scholar] [CrossRef]
- Furfari, F.; Crivello, A.; Barsocchi, P.; Palumbo, F.; Potortì, F. What is next for indoor localisation? Taxonomy, protocols, and patterns for advanced location based services. In Proceedings of the 2019 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Pisa, Italy, 30 September–3 October 2019; pp. 1–8. [Google Scholar]
- Gia, T.N.; Qingqing, L.; Queralta, J.P.; Zou, Z.; Tenhunen, H.; Westerlund, T. Edge AI in smart farming IoT: CNNs at the edge and fog computing with LoRa. In Proceedings of the 2019 IEEE AFRICON, Accra, Ghana, 25–27 September 2019; pp. 1–6. [Google Scholar]
- Queralta, J.P.; Gia, T.N.; Tenhunen, H.; Westerlund, T. Edge-AI in LoRa-based health monitoring: Fall detection system with fog computing and LSTM recurrent neural networks. In Proceedings of the 2019 42nd International Conference on Telecommunications and Signal Processing (TSP), Budapest, Hungary, 1–3 July 2019; pp. 601–604. [Google Scholar]
- Fayos-Jordan, R.; Felici-Castell, S.; Segura-Garcia, J.; Lopez-Ballester, J.; Cobos, M. Performance comparison of container orchestration platforms with low cost devices in the fog, assisting Internet of Things applications. J. Netw. Comput. Appl. 2020, 169, 102788. [Google Scholar] [CrossRef]
- Li, Y.; Zhuang, Y.; Hu, X.; Gao, Z.; Hu, J.; Chen, L.; He, Z.; Pei, L.; Chen, K.; Wang, M.; et al. Location-Enabled IoT (LE-IoT): A Survey of Positioning Techniques, Error Sources, and Mitigation. arXiv 2020, arXiv:2004.03738. [Google Scholar]
- Yang, Z.; Zhou, Z.; Liu, Y. From RSSI to CSI: Indoor localization via channel response. ACM Comput. Surv. (CSUR) 2013, 46, 1–32. [Google Scholar] [CrossRef]
- Mackey, A.; Spachos, P. LoRa-based localization system for emergency services in GPS-less environments. In Proceedings of the IEEE INFOCOM 2019-IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Paris, France, 29 April–2 May 2019; pp. 939–944. [Google Scholar]
- Barsocchi, P. Channel Models for TerrestrialWireless Communications: A Survey. CNR-ISTI Techical Report. 2006. Available online: https://www.csd.uoc.gr/~hy439/lectures11/2006-TR-16.physical_layer_tutorial.pdf (accessed on 9 November 2012).
- Svečko, J.; Malajner, M.; Gleich, D. Distance estimation using RSSI and particle filter. ISA Trans. 2015, 55, 275–285. [Google Scholar] [CrossRef] [PubMed]
- Li, C.; Tanghe, E.; Plets, D.; Suanet, P.; Hoebeke, J.; De Poorter, E.; Joseph, W. Reloc: Hybrid rssi-and phase-based relative uhf-rfid tag localization with cots devices. IEEE Trans. Instrum. Meas. 2020, 69, 8613–8627. [Google Scholar] [CrossRef]
- Zhao, S.; Zhang, X.P.; Cui, X.; Lu, M. A New TOA Localization and Synchronization System with Virtually Synchronized Periodic Asymmetric Ranging Network. IEEE Internet Things J. 2021, 8, 9030–9044. [Google Scholar] [CrossRef]
- BniLam, N.; Joosens, D.; Aernouts, M.; Steckel, J.; Weyn, M. LoRay: AoA Estimation System for Long Range Communication Networks. IEEE Trans. Wirel. Commun. 2020. [Google Scholar] [CrossRef]
- Burghal, D.; Ravi, A.T.; Rao, V.; Alghafis, A.A.; Molisch, A.F. A Comprehensive Survey of Machine Learning Based Localization with Wireless Signals. arXiv 2020, arXiv:2012.11171. [Google Scholar]
- Janssen, T.; BniLam, N.; Aernouts, M.; Berkvens, R.; Weyn, M. LoRa 2.4 GHz Communication Link and Range. Sensors 2020, 20, 4366. [Google Scholar] [CrossRef]
- Ferreira, A.E.; Ortiz, F.M.; Costa, L.H.M.; Foubert, B.; Amadou, I.; Mitton, N. A study of the LoRa signal propagation in forest, urban, and suburban environments. Ann. Telecommun. 2020, 75, 333–351. [Google Scholar] [CrossRef]
- Vo, Q.D.; De, P. A survey of fingerprint-based outdoor localization. IEEE Commun. Surv. Tutor. 2015, 18, 491–506. [Google Scholar] [CrossRef]
- Chaffo, F.; Saravia, P.; Kemper, G. A Wireless Communication Device Based on LoRa Module Aimed at Detecting Rectilinear Proximity Between Vehicles. In Proceedings of the 2019 Congreso Internacional de Innovación y Tendencias en Ingenieria (CONIITI), Bogota, Colombia, 2–4 October 2019; pp. 1–6. [Google Scholar]
- Ikpehai, A.; Adebisi, B.; Rabie, K.M.; Anoh, K.; Ande, R.E.; Hammoudeh, M.; Gacanin, H.; Mbanaso, U.M. Low-power wide area network technologies for internet-of-things: A comparative review. IEEE Internet Things J. 2018, 6, 2225–2240. [Google Scholar] [CrossRef] [Green Version]
- Plets, D.; Podevijn, N.; Trogh, J.; Martens, L.; Joseph, W. Experimental performance evaluation of outdoor tdoa and rss positioning in a public lora network. In Proceedings of the 2018 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Nantes, France, 24–27 September 2018; pp. 1–8. [Google Scholar]
- Anjum, M.; Khan, M.A.; Hassan, S.A.; Mahmood, A.; Gidlund, M. Analysis of RSSI fingerprinting in LoRa networks. In Proceedings of the 2019 15th InternationalWireless Communications & Mobile Computing Conference (IWCMC), Tangier, Morocco, 24–28 June 2019; pp. 1178–1183. [Google Scholar]
- Anagnostopoulos, G.G.; Kalousis, A. A reproducible analysis of RSSI fingerprinting for outdoor localization using sigfox: Preprocessing and hyperparameter tuning. In Proceedings of the 2019 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Pisa, Italy, 29 September–2 October 2019; pp. 1–8. [Google Scholar]
- Zafari, F.; Papapanagiotou, I.; Hacker, T.J. A novel Bayesian filtering based algorithm for RSSI-based indoor localization. In Proceedings of the 2018 IEEE International Conference on Communications (ICC), Kansas City, MO, USA, 20–24 May 2018; pp. 1–7. [Google Scholar]
- Savazzi, P.; Goldoni, E.; Vizziello, A.; Favalli, L.; Gamba, P. A Wiener-based RSSI localization algorithm exploiting modulation diversity in LoRa networks. IEEE Sens. J. 2019, 19, 12381–12388. [Google Scholar] [CrossRef]
- Biswas, D.; Barai, S.; Sau, B. Improved RSSI based Vehicle Localization using Base Station. In Proceedings of the 2021 International Conference on Innovative Trends in Information Technology (ICITIIT), Kottayam, India, 11–12 February 2021; pp. 1–6. [Google Scholar]
- Lam, K.H.; Cheung, C.C.; Lee, W.C. Rssi-based lora localization systems for large-scale indoor and outdoor environments. IEEE Trans. Veh. Technol. 2019, 68, 11778–11791. [Google Scholar] [CrossRef]
- Lam, K.H.; Cheung, C.C.; Lee, W.C. New rssi-based lora localization algorithms for very noisy outdoor environment. In Proceedings of the 2018 IEEE 42nd Annual Computer Software and Applications Conference (COMPSAC), Tokyo, Japan, 23–27 July 2018; Volume 2, pp. 794–799. [Google Scholar]
- Lazaro, A.; Lazaro, M.; Villarino, R. Room-Level Localization System Based on LoRa Backscatters. IEEE Access 2021, 9, 16004–16018. [Google Scholar] [CrossRef]
- Hashim, I.S.M.; Al-Hourani, A.; Rowe, W.S. Machine Learning Performance for Radio Localization under Correlated Shadowing. In Proceedings of the 2020 IEEE 14th International Conference on Signal Processing and Communication Systems (ICSPCS), Adelaide, SA, Australia, 14–16 December 2020; pp. 1–7. [Google Scholar]
- Daramouskas, I.; Kapoulas, V.; Paraskevas, M. Using neural networks for RSSI location estimation in LoRa networks. In Proceedings of the 2019 10th International Conference on Information, Intelligence, Systems and Applications (IISA), Patras, Greece, 15–17 July 2019; pp. 1–7. [Google Scholar]
- Purohit, J.; Wang, X.; Mao, S.; Sun, X.; Yang, C. Fingerprinting-based indoor and outdoor localization with LoRa and deep learning. In Proceedings of the GLOBECOM 2020—2020 IEEE Global Communications Conference, Taipei, Taiwan, 8–10 December 2020; pp. 1–6. [Google Scholar]
- Khatab, Z.E.; Hajihoseini, A.; Ghorashi, S.A. A fingerprint method for indoor localization using autoencoder based deep extreme learning machine. IEEE Sens. Lett. 2017, 2, 1–4. [Google Scholar] [CrossRef]
- Robyns, P.; Marin, E.; Lamotte, W.; Quax, P.; Singelée, D.; Preneel, B. Physical-layer fingerprinting of LoRa devices using supervised and zero-shot learning. In Proceedings of the 10th ACM Conference on Security and Privacy in Wireless and Mobile Networks, Boston, MA, USA, 18–20 July 2017; pp. 58–63. [Google Scholar]
- Chen, Y.S.; Hsu, C.S.; Huang, C.Y.; Hung, H.M. Outdoor Localization for LoRaWans Using Semi-Supervised Transfer Learning with Grid Segmentation. In Proceedings of the 2019 IEEE VTS Asia Pacific Wireless Communications Symposium (APWCS), Singapore, 28–30 August 2019; pp. 1–5. [Google Scholar]
- Chen, Y.S.; Hsu, C.S.; Huang, C.Y. A Semi-Supervised Transfer Learning with Grid Segmentation for Outdoor Localization over LoRaWans. Sensors 2021, 21, 2640. [Google Scholar] [CrossRef]
- Delafontaine, V.; Schiano, F.; Cocco, G.; Rusu, A.; Floreano, D. Drone-aided Localization in LoRa IoT Networks. arXiv 2020, arXiv:2004.03852. [Google Scholar]
- Anjum, M.; Khan, M.A.; Hassan, S.A.; Mahmood, A.; Qureshi, H.K.; Gidlund, M. RSSI Fingerprinting-based Localization Using Machine Learning in LoRa Networks. IEEE Internet Things Mag. 2020, 3, 53–59. [Google Scholar] [CrossRef]
- Lemic, F.; Handziski, V.; Aernouts, M.; Janssen, T.; Berkvens, R.; Wolisz, A.; Famaey, J. Regression-based estimation of individual errors in fingerprinting localization. IEEE Access 2019, 7, 33652–33664. [Google Scholar] [CrossRef]
- Lin, Y.; Dong, W.; Gao, Y.; Gu, T. SateLoc: A Virtual Fingerprinting Approach to Outdoor LoRa Localization using Satellite Images. ACM Trans. Sens. Netw. (TOSN) 2021, 17, 1–28. [Google Scholar] [CrossRef]
- Choi, W.; Chang, Y.S.; Jung, Y.; Song, J. Low-Power LoRa signal-based outdoor positioning using fingerprint Algorithm. ISPRS Int. J. Geo-Inf. 2018, 7, 440. [Google Scholar] [CrossRef] [Green Version]
- Podevijn, N.; Trogh, J.; Karaagac, A.; Haxhibeqiri, J.; Hoebeke, J.; Martens, L.; Suanet, P.; Hendrikse, K.; Plets, D.; Joseph, W. TDoA-based outdoor positioning in a public LoRa network. In Proceedings of the 12th European Conference on Antennas and Propagation (EuCAP 2018), London, UK, 9–13 April 2018; pp. 1–4. [Google Scholar]
- Pospisil, J.; Fujdiak, R.; Mikhaylov, K. Investigation of the Performance of TDoA-Based Localization Over LoRaWAN in Theory and Practice. Sensors 2020, 20, 5464. [Google Scholar] [CrossRef]
- Pérez-Solano, J.J.; Ezpeleta, S.; Claver, J.M. Indoor localization using time difference of arrival with UWB signals and unsynchronized devices. Ad. Hoc. Netw. 2020, 99, 102067. [Google Scholar] [CrossRef]
- Lopes, S.I.; Vieira, J.M.; Reis, J.; Albuquerque, D.; Carvalho, N.B. Accurate smartphone indoor positioning using a WSN infrastructure and non-invasive audio for TDoA estimation. Pervasive Mob. Comput. 2015, 20, 29–46. [Google Scholar] [CrossRef]
- ElSabaa, A.A.; Ward, M.; Wu, W. Hybrid Localization techniques in LoRa-based WSN. In Proceedings of the 2019 25th International Conference on Automation and Computing (ICAC), Lancaster, UK, 5–7 September 2019; pp. 1–5. [Google Scholar]
- Carrino, F.; Janka, A.; Abou Khaled, O.; Mugellini, E. LoRaLoc: Machine learning-based fingerprinting for outdoor geolocation using LoRa. In Proceedings of the 2019 6th Swiss Conference on Data Science (SDS), Bern, Switzerland, 14 June 2019; pp. 82–86. [Google Scholar]
- Li, X.; Leitinger, E.; Tufvesson, F. RSS-based localization of low-power IoT devices exploiting AoA and range information. In Proceedings of the 2020 54th Asilomar Conference on Signals, Systems, and Computers, Pacific Grove, CA, USA, 1–4 November 2020; pp. 651–656. [Google Scholar]
- Hu, K.; Chen, Y.; He, S.; Shi, Z.; Chen, J.; Tao, Z. ILoc: A low-cost low-power outdoor localization system for internet of things. In Proceedings of the 2019 IEEE Global Communications Conference (GLOBECOM), Waikoloa, HI, USA, 9–13 December 2019; pp. 1–6. [Google Scholar]
- Chen, H.; Zeng, J.; He, S.; Shi, Z.; Chen, J.; Tao, Z. MAGIC: A Lightweight System for Localizing Multiple Devices Via A Single LoRa Gateway. In Proceedings of the ICC 2020—2020 IEEE International Conference on Communications (ICC), Dublin, Ireland, 7–11 June 2020; pp. 1–6. [Google Scholar]
- Aernouts, M.; BniLam, N.; Berkvens, R.; Weyn, M. TDAoA: A combination of TDoA and AoA localization with LoRaWAN. Internet Things 2020, 11, 100236. [Google Scholar] [CrossRef]
- Ghobakhloo, M. Industry 4.0, digitization, and opportunities for sustainability. J. Clean. Prod. 2020, 252, 119869. [Google Scholar] [CrossRef]
- Vaidya, S.; Ambad, P.; Bhosle, S. Industry 4.0—A glimpse. Procedia Manuf. 2018, 20, 233–238. [Google Scholar] [CrossRef]
- Frank, A.G.; Dalenogare, L.S.; Ayala, N.F. Industry 4.0 technologies: Implementation patterns in manufacturing companies. Int. J. Prod. Econ. 2019, 210, 15–26. [Google Scholar] [CrossRef]
- Pătru, G.C.; Trancă, D.C.; Costea, C.M.; Rosner, D.; Rughiniş, R.V. LoRA based, low power remote monitoring and control solution for Industry 4.0 factories and facilities. In Proceedings of the 2019 18th RoEduNet Conference: Networking in Education and Research (RoEduNet), Galati, Romania, 10–12 October 2019; pp. 1–6. [Google Scholar]
- Ahsan, M.; Based, M.; Haider, J.; Rodrigues, E.M. Smart Monitoring and Controlling of Appliances Using LoRa Based IoT System. Designs 2021, 5, 17. [Google Scholar]
- Leonardi, L.; Battaglia, F.; Patti, G.; Bello, L.L. Industrial LoRa: A novel medium access strategy for LoRa in industry 4.0 applications. In Proceedings of the IECON 2018—44th Annual Conference of the IEEE Industrial Electronics Society, Washington, DC, USA, 21–23 October 2018; pp. 4141–4146. [Google Scholar]
- Rohit, S.; Jamkhandi, A.G.; Rao, A.; Krishna, V.; Naik, A.; Parathodiyil, M. IoT based identification and assessment of industrial assets. In Proceedings of the 2018 International Conference on Computing, Power and Communication Technologies (GUCON), Greater Noida, India, 28–29 September 2018; pp. 378–383. [Google Scholar]
- SV, A.; Ganesh, N.; Lekha, U.C.; Irfan, S. Industrial Parameters Monitoring with Lora Technology in next Generation Wireless Communications. Turk. J. Physiother. Rehabil. 2021, 32, 2. [Google Scholar]
- Elijah, O.; Rahman, T.A.; Orikumhi, I.; Leow, C.Y.; Hindia, M.N. An overview of Internet of Things (IoT) and data analytics in agriculture: Benefits and challenges. IEEE Internet Things J. 2018, 5, 3758–3773. [Google Scholar] [CrossRef]
- Swain, M.; Zimon, D.; Singh, R.; Hashmi, M.F.; Rashid, M.; Hakak, S. LoRa-LBO: An Experimental Analysis of LoRa Link Budget Optimization in Custom Build IoT Test Bed for Agriculture 4.0. Agronomy 2021, 11, 820. [Google Scholar] [CrossRef]
- Feltrin, L.; Buratti, C.; Vinciarelli, E.; De Bonis, R.; Verdone, R. LoRaWAN: Evaluation of link-and system-level performance. IEEE Internet Things J. 2018, 5, 2249–2258. [Google Scholar] [CrossRef]
- Miles, B.; Bourennane, E.B.; Boucherkha, S.; Chikhi, S. A study of LoRaWAN protocol performance for IoT applications in smart agriculture. Comput. Commun. 2020, 164, 148–157. [Google Scholar] [CrossRef]
- Iakovlev, R.; Saveliev, A. Approach to implementation of local navigation of mobile robotic systems in agriculture with the aid of radio modules. Telfor J. 2020, 12, 92–97. [Google Scholar] [CrossRef]
- Priyanta, I.F.; Golatowski, F.; Schulz, T.; Timmermann, D. Evaluation of LoRa technology for vehicle and asset tracking in smart harbors. In Proceedings of the IECON 2019—45th Annual Conference of the IEEE Industrial Electronics Society, Lisbon, Portugal, 14–17 October 2019; Volume 1, pp. 4221–4228. [Google Scholar]
- Sanchez-Iborra, R.; G Liaño, I.; Simoes, C.; Couñago, E.; Skarmeta, A.F. Tracking and monitoring system based on LoRa technology for lightweight boats. Electronics 2019, 8, 15. [Google Scholar] [CrossRef] [Green Version]
- Catarinucci, L.; De Donno, D.; Mainetti, L.; Palano, L.; Patrono, L.; Stefanizzi, M.L.; Tarricone, L. An IoT-aware architecture for smart healthcare systems. IEEE Internet Things J. 2015, 2, 515–526. [Google Scholar] [CrossRef]
- Baker, S.B.; Xiang, W.; Atkinson, I. Internet of things for smart healthcare: Technologies, challenges, and opportunities. IEEE Access 2017, 5, 26521–26544. [Google Scholar] [CrossRef]
- Misran, N.; Islam, M.S.; Beng, G.K.; Amin, N.; Islam, M.T. IoT based health monitoring system with LoRa communication technology. In Proceedings of the 2019 International Conference on Electrical Engineering and Informatics (ICEEI), Bandung, Indonesia, 9–10 July 2019; pp. 514–517. [Google Scholar]
- Shahidul Islam, M.; Islam, M.T.; Almutairi, A.F.; Beng, G.K.; Misran, N.; Amin, N. Monitoring of the human body signal through the Internet of Things (IoT) based LoRa wireless network system. Appl. Sci. 2019, 9, 1884. [Google Scholar] [CrossRef] [Green Version]
- Valach, A.; Macko, D. Exploration of the LoRa technology utilization possibilities in healthcare IoT devices. In Proceedings of the 2018 16th International Conference on Emerging eLearning Technologies and Applications (ICETA), Stary Smokovec, Slovakia, 15–16 November 2018; pp. 623–628. [Google Scholar]
- Cicirelli, G.; Marani, R.; Petitti, A.; Milella, A.; D’Orazio, T. Ambient Assisted Living: A Review of Technologies, Methodologies and Future Perspectives for Healthy Aging of Population. Sensors 2021, 21, 3549. [Google Scholar] [CrossRef] [PubMed]
- Fernandes, C.D.; Depari, A.; Sisinni, E.; Ferrari, P.; Flammini, A.; Rinaldi, S.; Pasetti, M. Hybrid indoor and outdoor localization for elderly care applications with LoRaWAN. In Proceedings of the 2020 IEEE International Symposium on Medical Measurements and Applications (MeMeA), Bari, Italy, 1 June–1 July 2020; pp. 1–6. [Google Scholar]
- Tayeh, G.B.; Azar, J.; Makhoul, A.; Guyeux, C.; Demerjian, J. A wearable lora-based emergency system for remote safety monitoring. In Proceedings of the 2020 International Wireless Communications and Mobile Computing (IWCMC), Limassol, Cyprus, 29 June–3 July 2020; pp. 120–125. [Google Scholar]
- Dehda, P.S.; Jayram, S.; Abu-Mahfouz, A.M.; Ouahada, K. A sea rescue operation system based on LoRa. In Proceedings of the 2019 International Conference on Advances in Big Data, Computing and Data Communication Systems (icABCD), Winterton, South Africa, 5–6 August 2019; pp. 1–6. [Google Scholar]
- Centelles, R.P.; Freitag, F.; Meseguer, R.; Navarro, L.; Ochoa, S.F.; Santos, R.M. A lora-based communication system for coordinated response in an earthquake aftermath. In Proceedings of the Multidisciplinary Digital Publishing Institute Proceedings, Toledo, Spain, 2–5 December 2019; Volume 31, pp. 1–12. [Google Scholar]
- Centelles, R.P.; Meseguer, R.; Freitag, F.; Navarro, L.; Ochoa, S.F.; Santos, R.M. LoRaMoto: A communication system to provide safety awareness among civilians after an earthquake. Future Gener. Comput. Syst. 2021, 115, 150–170. [Google Scholar] [CrossRef]
- Höchst, J.; Baumgärtner, L.; Kuntke, F.; Penning, A.; Sterz, A.; Freisleben, B. Lora-based device-to-device smartphone communication for crisis scenarios. In Proceedings of the 17th International Conference on Information Systems for Crisis Response and Management (ISCRAM), Blacksburg, VA, USA, 24–27 May 2020. [Google Scholar]
- Sciullo, L.; Fossemo, F.; Trotta, A.; Di Felice, M. Locate: A lora-based mobile emergency management system. In Proceedings of the 2018 IEEE Global Communications Conference (GLOBECOM), Abu Dhabi, United Arab Emirates, 9–13 December 2018; pp. 1–7. [Google Scholar]
- Sciullo, L.; Trotta, A.; Di Felice, M. Design and performance evaluation of a LoRa-based mobile emergency management system (LOCATE). Ad. Hoc. Netw. 2020, 96, 101993. [Google Scholar] [CrossRef]
- Bianco, G.M.; Giuliano, R.; Marrocco, G.; Mazzenga, F.; Mejia-Aguilar, A. LoRa System for Search and Rescue: Path-Loss Models and Procedures in Mountain Scenarios. IEEE Internet Things J. 2020, 8, 1985–1999. [Google Scholar] [CrossRef]
- Bianco, G.M.; Mejia-Aguilar, A.; Marrocco, G. Radio wave propagation of LoRa systems in mountains for Search and Rescue operations. In Proceedings of the 2020 XXXIIIrd General Assembly and Scientific Symposium of the International Union of Radio Science, Rome, Italy, 29 August–5 September 2020; pp. 1–3. [Google Scholar]
- Zantalis, F.; Koulouras, G.; Karabetsos, S.; Kandris, D. A review of machine learning and IoT in smart transportation. Future Internet 2019, 11, 94. [Google Scholar] [CrossRef] [Green Version]
- Dirnfeld, R.; Flammini, F.; Marrone, S.; Nardone, R.; Vittorini, V. Low-power wide-area networks in intelligent transportation: Review and opportunities for smart-railways. In Proceedings of the 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC)E, Rhodes, Greece, 20–23 September 2020; pp. 1–7. [Google Scholar]
- Guerrero-Ibáñez, J.; Zeadally, S.; Contreras-Castillo, J. Sensor technologies for intelligent transportation systems. Sensors 2018, 18, 1212. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Haque, K.F.; Abdelgawad, A.; Yanambaka, V.P.; Yelamarthi, K. Lora architecture for v2x communication: An experimental evaluation with vehicles on the move. Sensors 2020, 20, 6876. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Han, S.; Yang, L.; Wang, F.Y.; Zhang, H. LoRa on the move: Performance evaluation of LoRa in V2X communications. In Proceedings of the 2018 IEEE Intelligent Vehicles Symposium (IV), Changshu, China, 26–30 June 2018; pp. 1107–1111. [Google Scholar]
- Ilham, A.; Angriawan, R. Integration of LoRa-Cellular: Design and Implementation of Data Communication in Vehicle Tracking Systems. In IOP Conference Series: Materials Science and Engineering; IOP Publishing: Bristol, UK, 2019; Volume 676, p. 012010. [Google Scholar]
- Jurado Murillo, F.; Quintero Yoshioka, J.S.; Varela López, A.D.; Salazar-Cabrera, R.; Pachón de la Cruz, Á.; Madrid Molina, J.M. Experimental Evaluation of LoRa in Transit Vehicle Tracking Service Based on Intelligent Transportation Systems and IoT. Electronics 2020, 9, 1950. [Google Scholar] [CrossRef]
- Guan, P.; Zhang, Z.; Wei, L.; Zhao, Y. A real-time bus positioning system based on LoRa technology. In Proceedings of the 2018 2nd International Conference on Smart Grid and Smart Cities (ICSGSC), Kuala Lumpur, Malaysia, 12–14 August 2018; pp. 45–48. [Google Scholar]
- Boshita, T.; Suzuki, H.; Matsumoto, Y. IoT-based bus location system using LoRaWAN. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 933–938. [Google Scholar]
- Salazar-Cabrera, R.; Pachón de la Cruz, Á.; Madrid Molina, J.M. Proof of concept of an iot-based public vehicle tracking system, using lora (long range) and intelligent transportation system (its) services. J. Comput. Netw. Commun. 2019, 2019. [Google Scholar] [CrossRef] [Green Version]
- Ahad, M.A.; Paiva, S.; Tripathi, G.; Feroz, N. Enabling technologies and sustainable smart cities. Sustain. Cities Soc. 2020, 61, 102301. [Google Scholar] [CrossRef]
- Silva, B.N.; Khan, M.; Han, K. Towards sustainable smart cities: A review of trends, architectures, components, and open challenges in smart cities. Sustain. Cities Soc. 2018, 38, 697–713. [Google Scholar] [CrossRef]
- Tzortzakis, K.; Papafotis, K.; Sotiriadis, P.P. Wireless self powered environmental monitoring system for smart cities based on LoRa. In Proceedings of the 2017 Panhellenic Conference on Electronics and Telecommunications (PACET), Xanthi, Greece, 17–18 November 2017; pp. 1–4. [Google Scholar]
- Emmanuel, A.L.; Fernando, X.; Hussain, F.; Farjow, W. Optimization of spreading factor distribution in high density LoRa networks. In Proceedings of the 2020 IEEE 91st Vehicular Technology Conference (VTC2020-Spring), Antwerp, Belgium, 25–28 May 2020; pp. 1–5. [Google Scholar]
- Deese, A.S.; Jesson, J.; Brennan, T.; Hollain, S.; Stefanacci, P.; Driscoll, E.; Dick, C.; Garcia, K.; Mosher, R.; Rentsch, B. Long-term monitoring of smart city assets via Internet of Things and low-power wide-area networks. IEEE Internet Things J. 2020, 8, 222–231. [Google Scholar] [CrossRef]
- Croce, D.; Garlisi, D.; Giuliano, F.; Valvo, A.L.; Mangione, S.; Tinnirello, I. Performance of lora for bike-sharing systems. In Proceedings of the 2019 AEIT International Conference of Electrical and Electronic Technologies for Automotive (AEIT AUTOMOTIVE), Turin, Italy, 2–4 July 2019; pp. 1–6. [Google Scholar]
- Carvalho, D.F.; Depari, A.; Ferrari, P.; Flammini, A.; Rinaldi, S.; Sisinni, E. On the feasibility of mobile sensing and tracking applications based on LPWAN. In Proceedings of the 2018 IEEE Sensors Applications Symposium (SAS), Seoul, Korea, 12–14 March 2018; pp. 1–6. [Google Scholar]
- Ferreira, A.E.; Ortiz, F.M.; Almeida, T.T.d.; Costa, L.H.M. A Visitor Assistance System Based on LoRa for Nature Forest Parks. Electronics 2020, 9, 696. [Google Scholar] [CrossRef]
- Mikhaylov, K.; Stusek, M.; Masek, P.; Petrov, V.; Petajajarvi, J.; Andreev, S.; Pokorny, J.; Hosek, J.; Pouttu, A.; Koucheryavy, Y. Multi-rat lpwan in smart cities: Trial of lorawan and nb-iot integration. In Proceedings of the 2018 IEEE International Conference on Communications (ICC), Kansas City, MO, USA, 20–24 May 2018; pp. 1–6. [Google Scholar]
- Dinh, T.D.; Kirichek, R. Method for organizing mesh topology based on LoRa technology. In Proceedings of the 2018 10th International Congress on Ultra Modern Telecommunications and Control Systems and Workshops (ICUMT), Moscow, Russia, 5–9 November 2018; pp. 1–6. [Google Scholar]
- Berto, R.; Napoletano, P.; Savi, M. A LoRa-Based Mesh Network for Peer-to-Peer Long-Range Communication. Sensors 2021, 21, 4314. [Google Scholar] [CrossRef]
- Kisel, V.; Kirichek, R.; Koucheryavy, A.; Shestakov, A. Evaluation of A Mesh Network based on LoRa Technology. In Proceedings of the 2021 23rd International Conference on Advanced Communication Technology (ICACT), PyeongChang, Korea, 7–10 February 2021; pp. 1–6. [Google Scholar]
- Chatterjee, B.; Seo, D.H.; Chakraborty, S.; Avlani, S.; Jiang, X.; Zhang, H.; Abdallah, M.; Raghunathan, N.; Mousoulis, C.; Shakouri, A.; et al. Context-Aware Collaborative Intelligence with Spatio-Temporal In-Sensor-Analytics for Efficient Communication in a Large-Area IoT Testbed. IEEE Internet Things J. 2020, 8, 6800–6814. [Google Scholar] [CrossRef]
- Chacko, S.; Job, M.D. Security mechanisms and Vulnerabilities in LPWAN. In IOP Conference Series: Materials Science and Engineering; IOP Publishing: Bristol, UK, 2018; Volume 396, p. 012027. [Google Scholar]
- Mahmood, A.; Sisinni, E.; Guntupalli, L.; Rondón, R.; Hassan, S.A.; Gidlund, M. Scalability analysis of a LoRa network under imperfect orthogonality. IEEE Trans. Ind. Inform. 2018, 15, 1425–1436. [Google Scholar] [CrossRef] [Green Version]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technology | LTE-M | NB-IoT | Sigfox | LoRaWAN |
|---|---|---|---|---|
| Frequency Channel | Licensed LTE frequency spectrum | Licensed LTE frequency spectrum | License-free channel of 868 MHz (in Europe), 902 MHz (in US), and 433 MHz (in Asia) | License-free channel of 868 MHz (in Europe), 902 MHz (in US), and 433 MHz (in Asia) |
| Bandwidth | 200 kHz | 200 kHz | 100 Hz (in Europe) and 600 Hz (in US) for uplink and 1.5 kHz for downlink | Range from 7.8 kHz to 500 kHz. |
| Modulation | QAM | QPSK | DBPSK modulation for uplink and GFSK modulation for downlink | CSS (Fsk is defined too) |
| Maximum Throughput | 1 Mbps | 200 kbps | 100 bps | 37.5 kbps |
| Maximum Range | 5 km | 1 km (in urban) and 10 km (in rural) | 10 km (in urban) and 40 km (in rural) | 5 km (in urban) and 20 km (in rural) |
| Packet Payload size | 100 bytes | 1600 bytes | 12 (uplink packet) and 8 (downlink packet) bytes | 243 bytes |
| Battery life time (1000 mAH) | 9 month | 3.5 years | 4.5 years | 5 years |
| Maximum message per day | Unlimited | Unlimited | 140 message (uplink) and 4 message (downlink) | Unlimited |
| Topology | Cellular Network | Cellular Network | Star | Star |
| Authentication | LTE encryption | LTE encryption | Not supported | Over-The-Air Activation and Activation by personalization |
| Advantage | Higher traffic reliability with low delay | Higher traffic reliability | Wide communication range | Allow private network construction, Provide energy consumption Management by different class type definition, Adaptive data rate |
| Disadvantage | Higher energy consumption (more than NB-IOT) | Higher energy consumption | Do not allow private network, Has a maximum message limitation per day | signal attenuation and interference |
| Reference | Localization Technique | Method |
|---|---|---|
| Savazzi et al. (2019) [57] | RSSI | Wiener Filter for noise decrement |
| Biswas et al. (2021) [58] | RSSI | GSAM to decrease interference effect |
| Lam et al. (2019) [59] | RSSI | Six algorithm for non-Gaussian noise decrement |
| Daramouskas et al. (2019) [63] | RSSI | NN for Location estimation |
| Chen et al. (2019) [67] | RSSI | DNN for location estimation |
| Chen et al. (2021) [68] | RSSI | DNN for location estimation |
| Delafontaine et al. (2020) [69] | RSSI | Exploit from UAV for accuracy improvement |
| Anjum et al. (2019) [54] | RSSI-based Fingerprint | Analysis of regression and ML models |
| Lin et al. (2020) [72] | RSSI-based Fingerprint | High-resolution satellite images adoption |
| Choi et al. (2018) [73] | RSSI-based Fingerprint | Use interpolated fingerprint map |
| Podevijn et al. (2018) [74] | TDoA | Road map and movement speed consideration |
| Pospisil et al. (2020) [75] | TDoA | Combine Chan’s and Foy’s TDoA algorithms |
| Elsabaa et al. (2019) [78] | TDoA | adopts ultrasonic signals |
| Carrino et al. (2019) [79] | TDoA-based fingerprint | Random Forest and NN |
| Lin et al. (2020) [44] | AoA and RSSI | Dynamic path-loss exponent consideration |
| Hu et al. (2019) [81] | RSSI and ToA | Regression analysis |
| Chen et al. (2020) [82] | RSSI and ToA | Regression analysis |
| Application Domain | Accuracy | Latency | Energy Consumption | Scalability | Security and Privacy |
|---|---|---|---|---|---|
| Smart Factory | ✓ | ✓ | * | * | ✓ |
| Smart Healthcare | ✓ | ✓ | ✓ | * | ✓ |
| Smart Transportation | * | * | * | ✓ | ✓ |
| Smart City | * | * | ✓ | ✓ | ✓ |
| Reference | Application Domain | Purpose | IoT Localization Approach |
|---|---|---|---|
| Rohit et al. (2018) [90] | Industry 4.0 | Asset localization and tracking | GPS and LoRaWAN |
| Swain et al. (2021) [93] | Industry 4.0 | Agriculture sensor nodes localization | LoRaWAN and Wi-Fi |
| Miles et al. (2020) [95] | Industry 4.0 | Performance evaluation of the LoRaWAN | Number of Nodes and transmission interval |
| Iakovlev et al. (2020) [96] | Industry 4.0 | Mobile robotic localization | UAV aided with LoRaWAN |
| Priyanta et al. (2019) [97] | Industry 4.0 | Harbors assets localization | Evaluate SF, number of nodes, etc. parameters |
| Sanchez et al. (2019) [98] | Industry 4.0 | Boat tracking and monitoring | RSSI with different LoRaWAN factors |
| Fernandes et al. (2020) [105] | Smart Healthcare | Elderly position monitoring | GNSS for outdoor and ToA for indoor |
| Tayeh et al. (2020) [106] | Smart Healthcare | Localization in risky outdoor | GPS with LoRaWAN |
| Dehda et al. (2019) [107] | Smart Healthcare | Sea rescue system | GPS with LoRaWAN |
| Sciullo et al. (2018) [111] | Smart Healthcare | Phone-based ECS | GPS with LoRaWAN |
| Bianco et al. (2020) [113] | Smart Healthcare | Mountain Search and Rescue | Pass loss model |
| Ilham et al. (2019) [120] | Smart Transportation | Hybrid communications | RSSI level and energy consumption |
| Jurado et al. (2020) [121] | Smart Transportation | Transit vehicle tracking | RSSI |
| Guan et al. (2018) [122] | Smart Transportation | Bus positioning system | GPS with LoRaWAN |
| Boshita et al. (2018) [123] | Smart Transportation | IoT-based bus location system | using the location and delay information |
| Salazar et al. (2020) [124] | Smart Transportation | Public vehicle tracking | GPS with LoRaWAN |
| Deese et al. (2020) [129] | Smart City | City assets track and localization | RSSI |
| Croce et al. (2019) [130] | Smart City | Bike localization system | RSSI |
| Carvalho et al. (2018) [131] | Smart City | Mobile applications localization | Network transfer protocol |
| Ferreira et al. (2020) [132] | Smart City | Ecotourism visitor assistance | GPS and RSSI |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Moradbeikie, A.; Keshavarz, A.; Rostami, H.; Paiva, S.; Lopes, S.I. GNSS-Free Outdoor Localization Techniques for Resource-Constrained IoT Architectures: A Literature Review. Appl. Sci. 2021, 11, 10793. https://doi.org/10.3390/app112210793
Moradbeikie A, Keshavarz A, Rostami H, Paiva S, Lopes SI. GNSS-Free Outdoor Localization Techniques for Resource-Constrained IoT Architectures: A Literature Review. Applied Sciences. 2021; 11(22):10793. https://doi.org/10.3390/app112210793
Chicago/Turabian StyleMoradbeikie, Azin, Ahmad Keshavarz, Habib Rostami, Sara Paiva, and Sérgio Ivan Lopes. 2021. "GNSS-Free Outdoor Localization Techniques for Resource-Constrained IoT Architectures: A Literature Review" Applied Sciences 11, no. 22: 10793. https://doi.org/10.3390/app112210793
APA StyleMoradbeikie, A., Keshavarz, A., Rostami, H., Paiva, S., & Lopes, S. I. (2021). GNSS-Free Outdoor Localization Techniques for Resource-Constrained IoT Architectures: A Literature Review. Applied Sciences, 11(22), 10793. https://doi.org/10.3390/app112210793