
Measuring Ocean Surface Current in the Kuroshio Region Using Gaofen-3 SAR Data


Abstract
1. Introduction
2. Measurement of the Ocean Surface Current
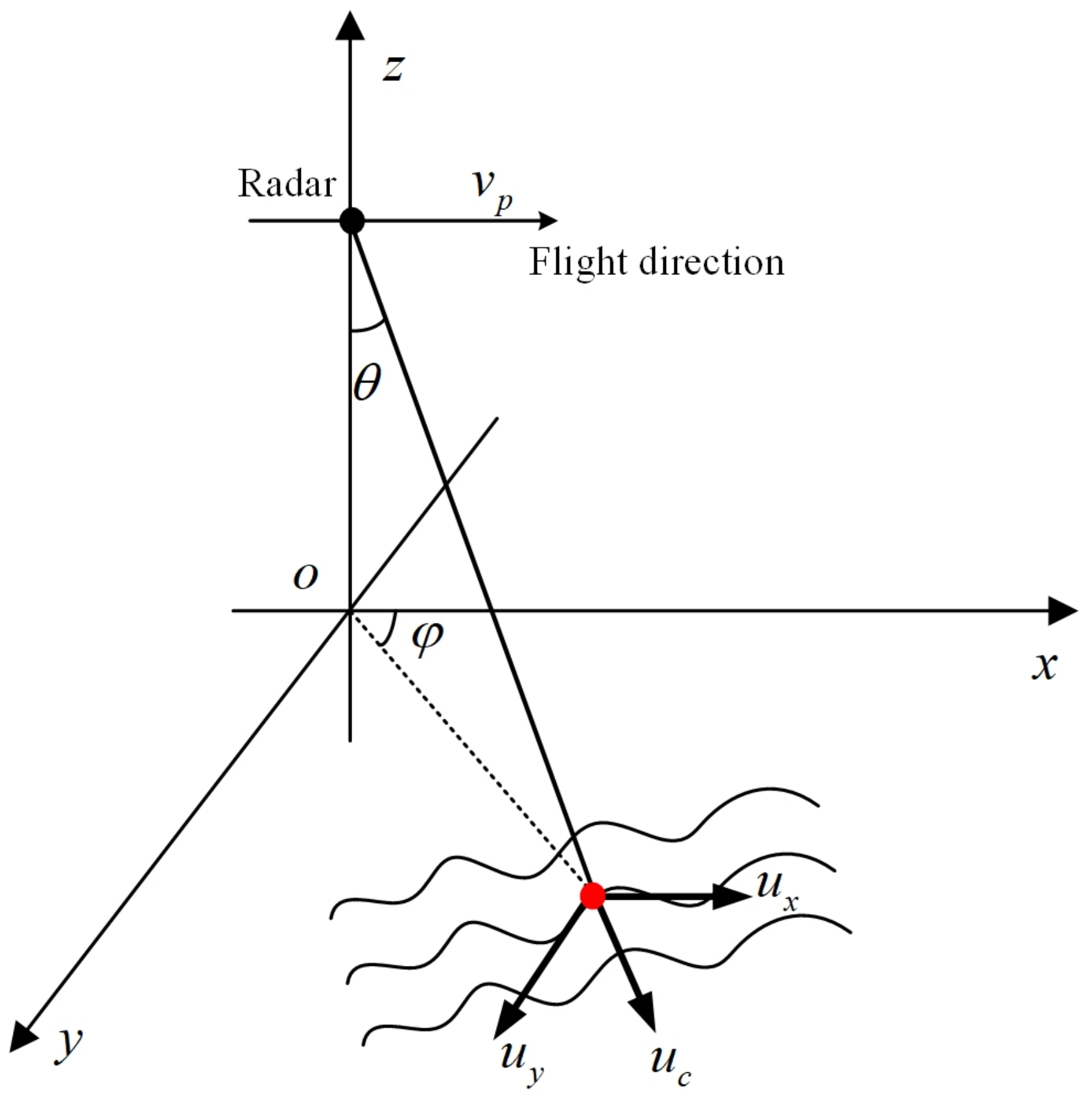
2.1. Ocean Doppler Information of Single Antenna SAR Data
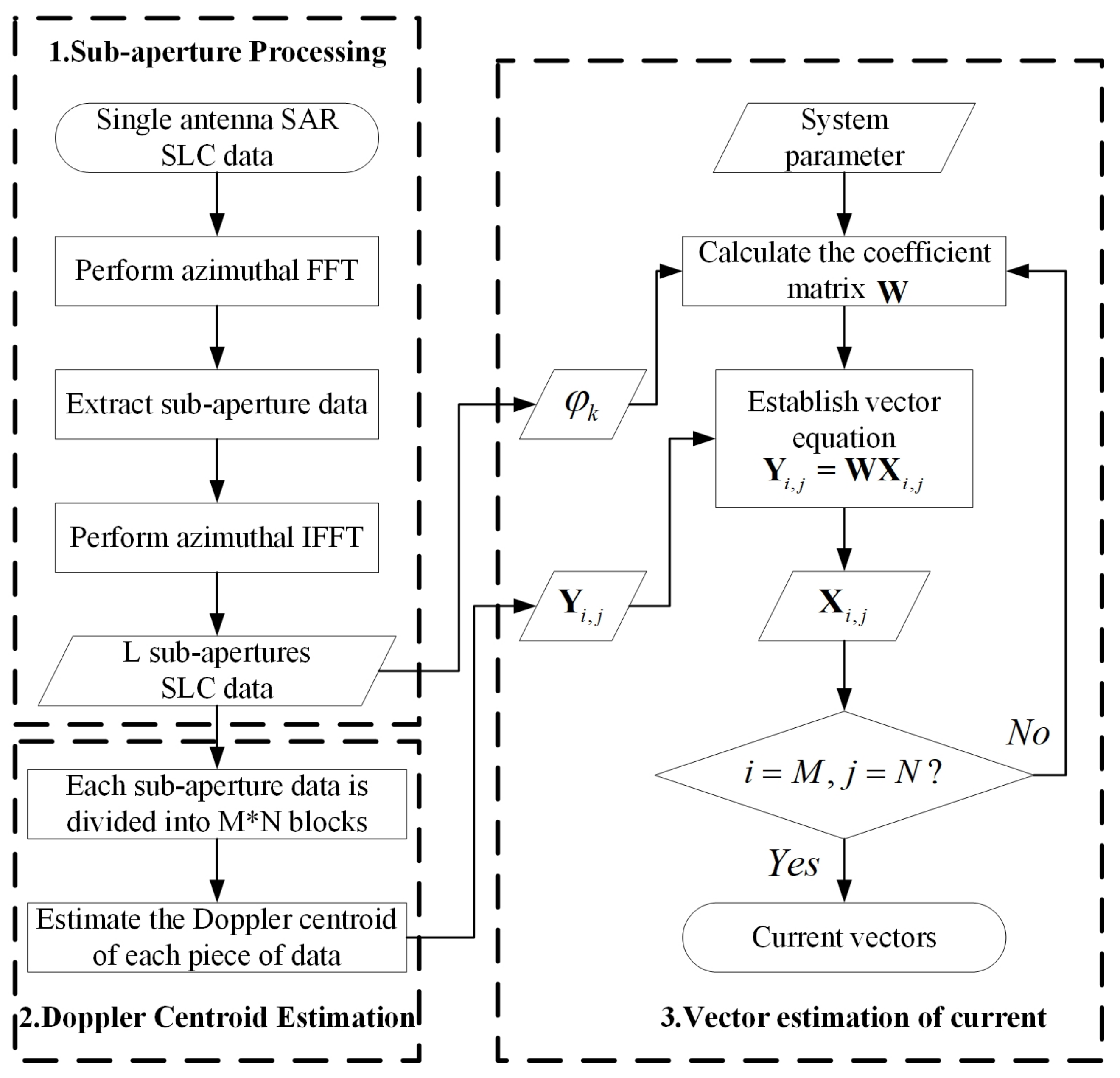
2.2. Measurement Method with Single Antenna SAR Data
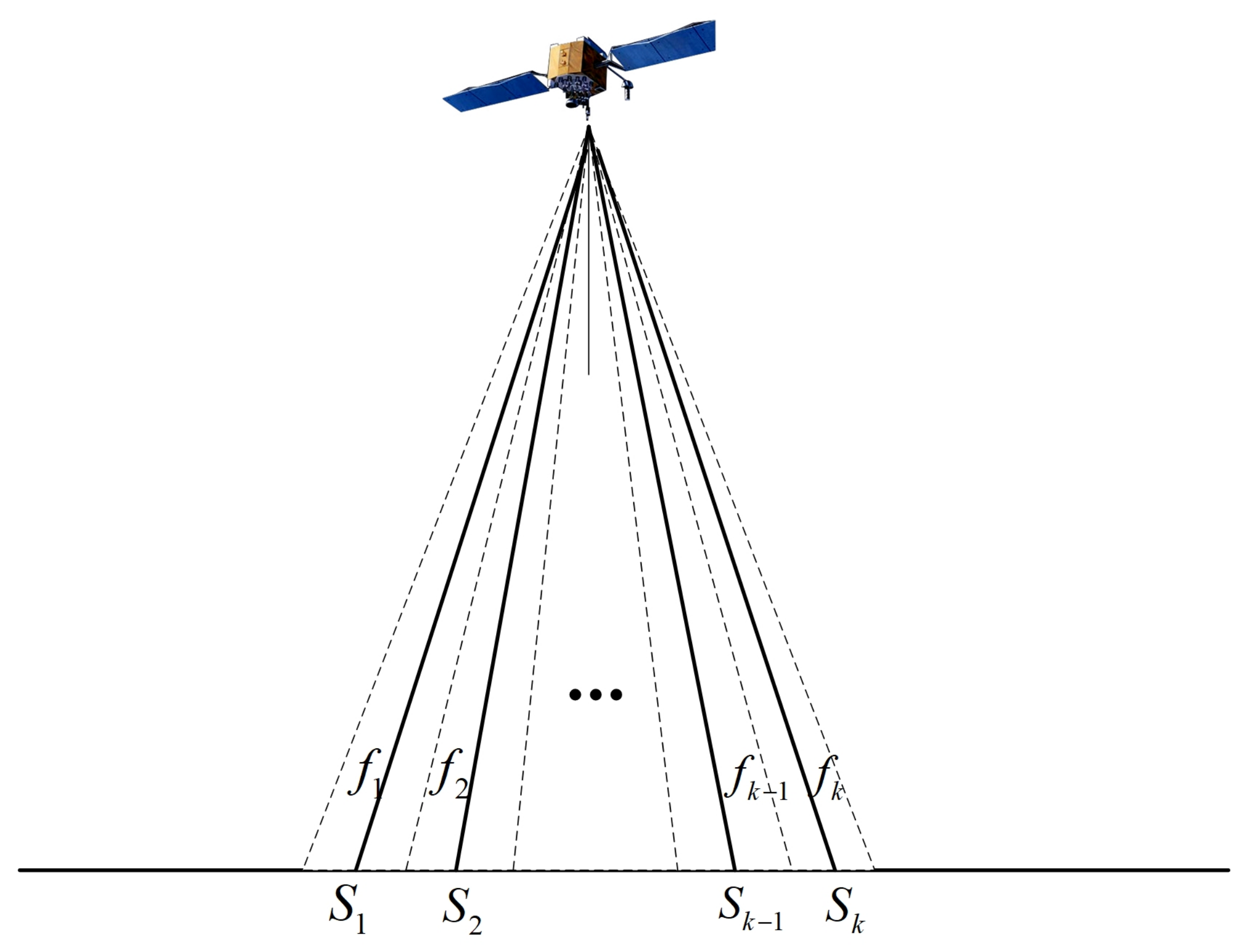
2.2.1. Sub-Aperture Processing
2.2.2. Doppler Centroid Estimation
2.2.3. Vector Estimation of Ocean Current
3. Gaofen-3 Data Experiment and Results
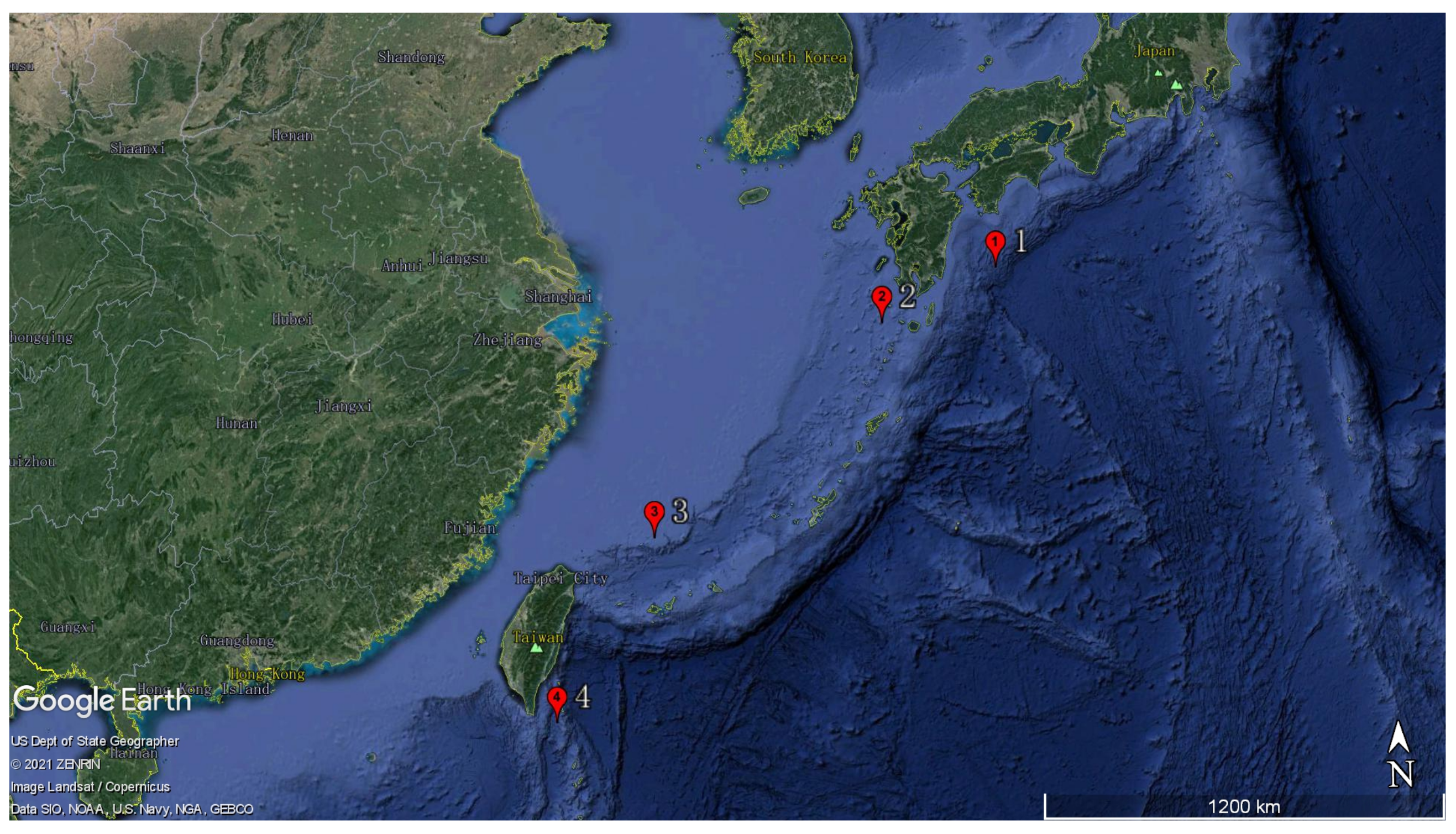
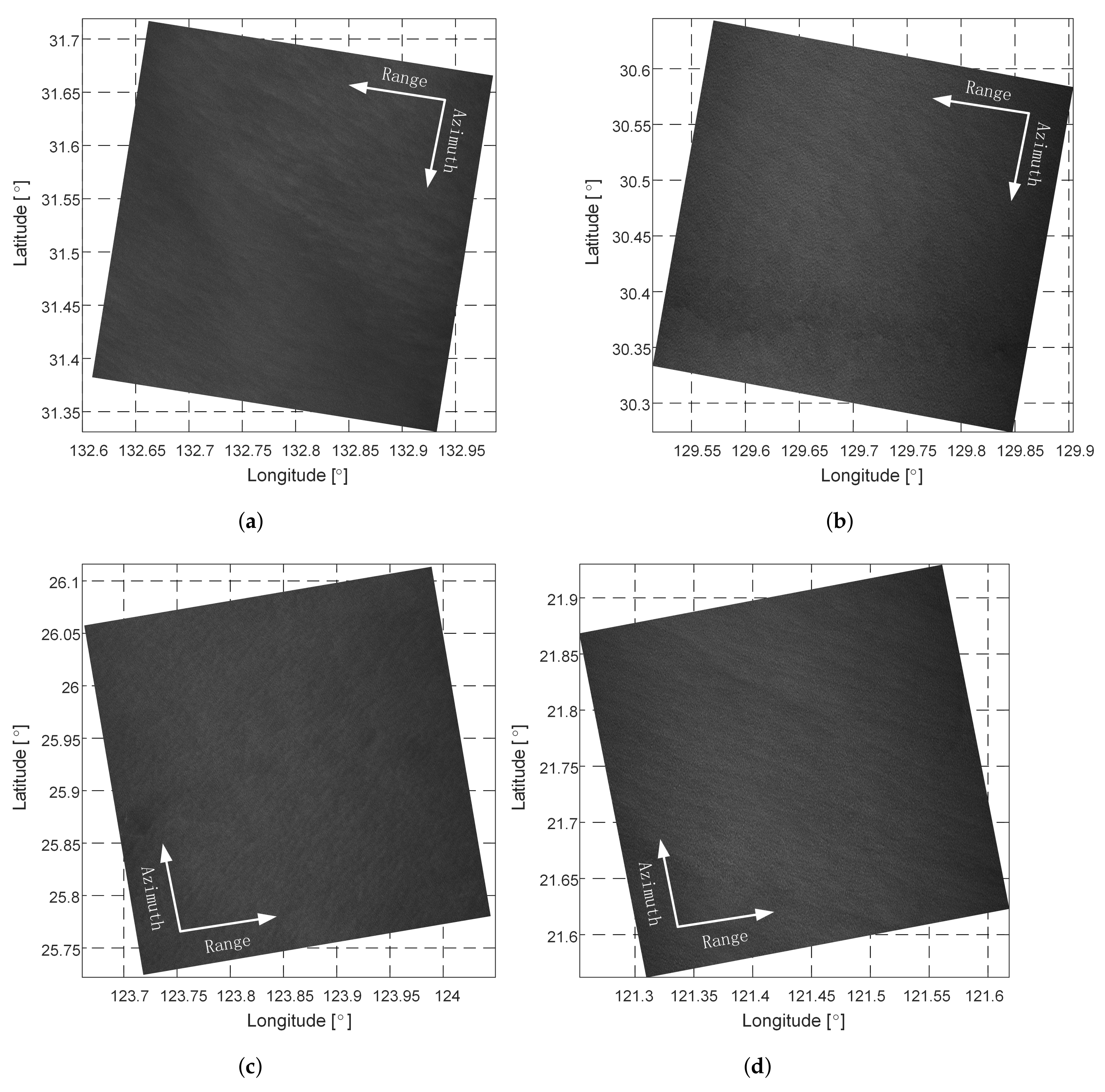
3.1. Experiment Description
3.2. Retrieved Ocean Surface Current
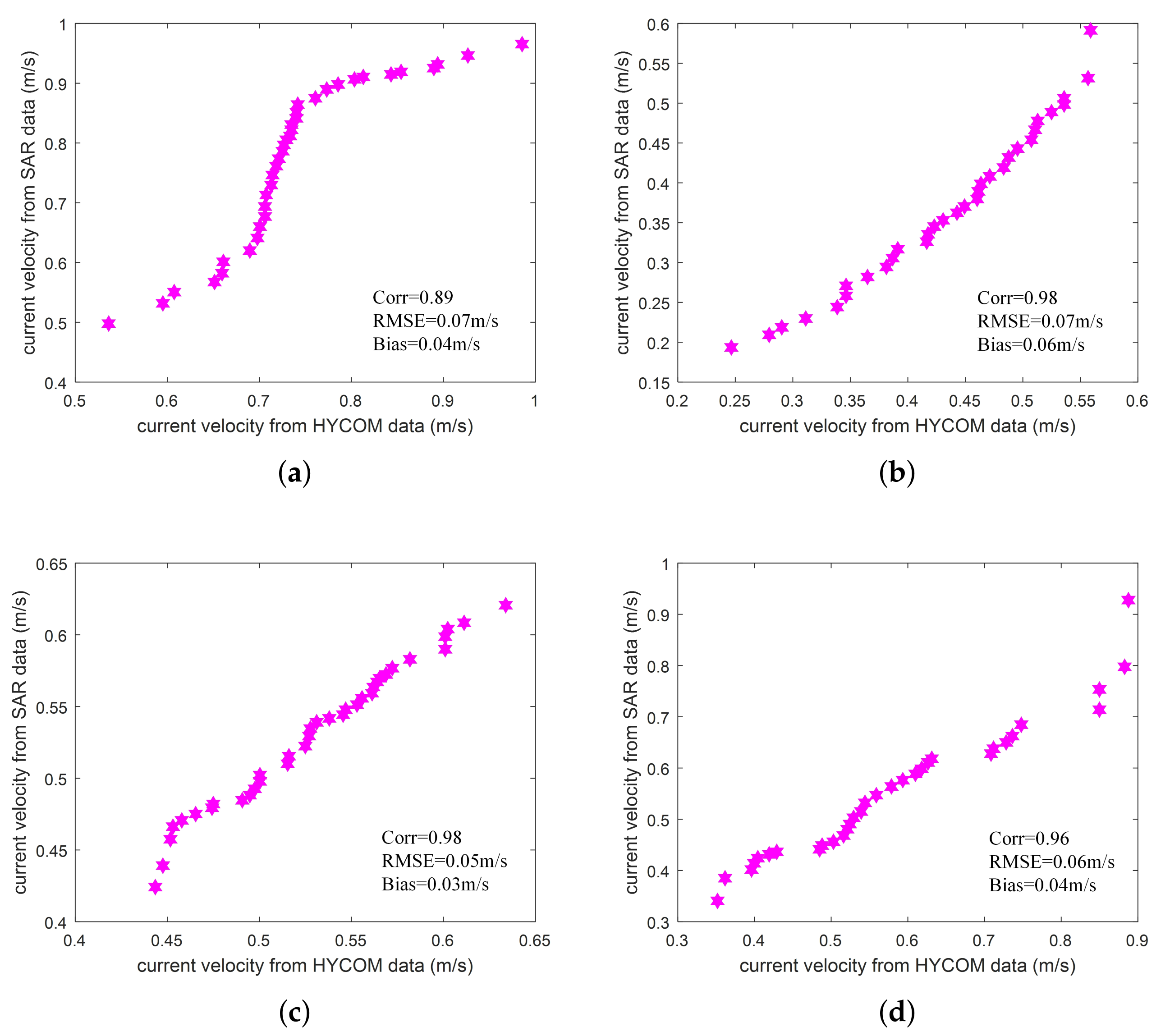
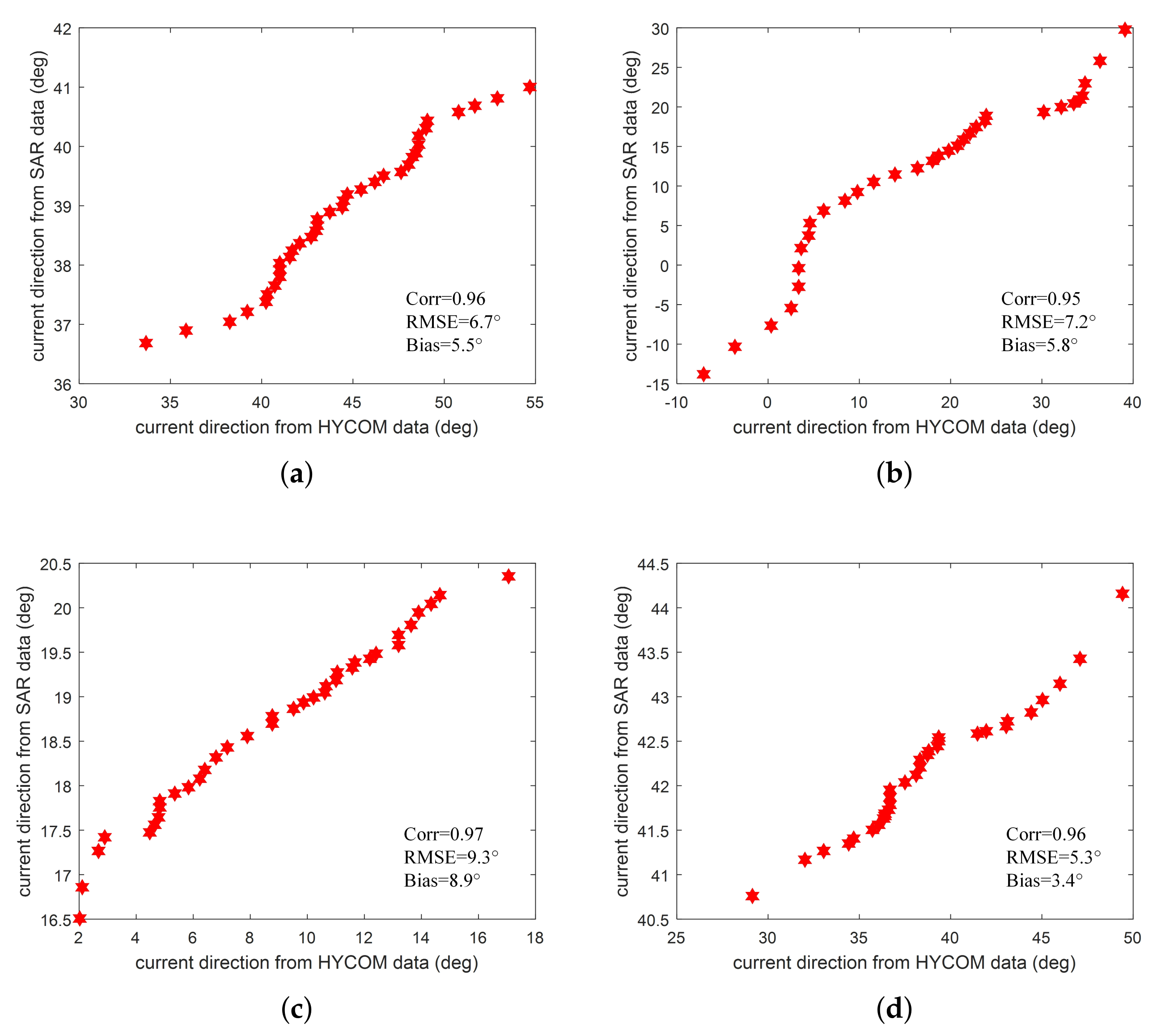
3.3. Results Validation
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Fischer, J.; Flemming, N.C. Operational Oceanography: Data Requirements Survey; Southampton Oceanography Centre: Southampton, UK, 1999. [Google Scholar]
- Elyouncha, A.; Eriksson, L.E.B.; Romeiser, R.; Ulander, L.M.H. Measurements of Sea Surface Currents in the Baltic Sea Region Using Spaceborne Along-Track InSAR. IEEE Trans. Geosci. Remote Sens. 2019, 57, 8584–8599. [Google Scholar] [CrossRef]
- Romeiser, R. The future of SAR-based oceanography: High-resolution current measurements by along-track interferometry. Oceanography 2013, 26, 92–99. [Google Scholar] [CrossRef][Green Version]
- Elyouncha, A.; Eriksson, L.E.B.; Romeiser, R.; Ulander, L.M.H. Empirical Relationship between the Doppler Centroid Derived from X-Band Spaceborne InSAR Data and Wind Vectors. IEEE Trans. Geosci. Remote Sens. 2021, in press. [Google Scholar] [CrossRef]
- Chapron, B.; Collard, F.; Ardhuin, F. Direct measurements of ocean surface velocity from space: Interpretation and validation. J. Geophys. Res. Oceans 2005, 110, C07008. [Google Scholar] [CrossRef]
- Johannessen, J.A.; Chapron, B.; Collard, F.; Kudryavtsev, V.; Mouche, A.; Akimov, D.; Dagestad, K.F. Direct ocean surface velocity measurements from space: Improved quantitative interpretation of Envisat ASAR observations. Geophys. Res. Lett. 2008, 35, L22608. [Google Scholar] [CrossRef]
- Rouault, M.J.; Mouche, A.; Collard, F.; Johannessen, J.; Chapron, B. Mapping the Agulhas Current from space: An assessment of ASAR surface current velocities. J. Geophys. Res. Oceans 2010, 115, C10026. [Google Scholar] [CrossRef]
- Hansen, M.W.; Collard, F.; Dagestad, K.F.; Johannessen, J.A.; Fabry, P.; Chapron, B. Retrieval of sea surface range velocities from Envisat ASAR Doppler centroid measurements. IEEE Trans. Geosci. Remote Sens. 2011, 49, 3582–3592. [Google Scholar] [CrossRef]
- Frasier, S.J.; Carswell, J.R.; Capdevila, J. A pod-based dual-beam interferometric radar for ocean surface current vector mapping. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Sydney, NSW, Australia, 9–13 July 2004; pp. 561–563. [Google Scholar]
- Toporkov, J.V.; Perkovic, D.; Farquharson, G.; Sletten, M.A.; Frasier, S.J. Sea surface velocity vector retrieval using dual-beam interferometry: First demonstration. IEEE Trans. Geosci. Remote Sens. 2005, 43, 2494–2502. [Google Scholar] [CrossRef]
- Martin, A.C.H.; Gommenginger, C. Towards wide-swath high-resolution mapping of total ocean surface current vectors from space: Airborne proof-of-concept and validation. Remote Sens. Environ. 2017, 197, 58–71. [Google Scholar] [CrossRef]
- Hwang, C.; Kao, R. TOPEX/POSEIDON-derived space–time variations of the Kuroshio Current: Applications of a gravimetric geoid and wavelet analysis. Geophys. J. Int. 2002, 151, 835–847. [Google Scholar] [CrossRef]
- Chao, M.; Wu, D.; Lin, X. Variability of surface velocity in the Kuroshio Current and adjacent waters derived from Argos drifter buoys and satellite altimeter data. Chin. J. Oceanol. Limnol. 2009, 27, 208–217. [Google Scholar]
- Yang, J.; Yuan, X.; Han, B.; Zhao, L.; Sun, J.; Shang, M.; Wang, X.; Ding, C. Phase Imbalance Analysis of GF-3 Along-Track InSAR Data and Ocean Current Measurements. Remote Sens. 2021, 13, 269. [Google Scholar] [CrossRef]
- Yang, J.S.; Ren, L.; Wang, J. The First Quantitative Remote Sensing of Ocean Surface Waves by Chinese GF-3 SAR Satellite. Oceanol. Limnol. Sin. 2017, 48, 207–209. [Google Scholar]
- Ren, L.; Yang, J.; Mouche, A.A.; Wang, H.; Zheng, G.; Wang, J.; Zhang, H.; Lou, X.; Chen, P. Assessments of Ocean Wind Retrieval Schemes Used for Chinese Gaofen-3 Synthetic Aperture Radar Co-Polarized Data. IEEE Trans. Geosci. Remote Sens. 2019, 57, 7075–7085. [Google Scholar] [CrossRef]
- Yang, J.; Wang, J.; Lin, R. The first quantitative remote sensing of ocean internal waves by Chinese GF-3 SAR satellite. Acta Oceanol. Sin. 2017, 36, 118. [Google Scholar] [CrossRef]
- Moiseev, A.; Johnsen, H.; Hansen, M.W.; Johannessen, J.A. Evaluation of Radial Ocean Surface Currents Derived From Sentinel-1 IW Doppler Shift Using Coastal Radar and Lagrangian Surface Drifter Observations. J. Geophys. Res. Oceans 2020, 125, 1–18. [Google Scholar] [CrossRef]
- Plant, W.J. Bragg scattering of electromagnetic waves from the air/sea interface. In Surface Waves and Fluxes; Springer: Amsterdam, The Netheriands, 1990; pp. 41–108. [Google Scholar]
- Plant, W.J.; Keller, W.C.; Hayes, K. Measurement of river surface currents with coherent microwave systems. IEEE Trans. Geosci. Remote Sens. 2005, 43, 1242–1257. [Google Scholar] [CrossRef]
- Yurovsky, Y.Y.; Kudryavtsev, V.N.; Grodsky, S.A.; Chapron, B. Sea Surface Ka-Band Doppler Measurements: Analysis and Model Development. Remote Sens. 2019, 11, 839. [Google Scholar] [CrossRef]
- Mouche, A.A.; Collard, F.; Chapron, B.; Dagestad, K.-F.; Guitton, G.; Johannessen, J.A.; Kerbaol, V.; Hansen, M.W. On the Use of Doppler Shift for Sea Surface Wind Retrieval From SAR. IEEE Trans. Geosci. Remote Sens. 2012, 50, 2901–2909. [Google Scholar] [CrossRef]
- Yu, X.Z.; Chong, J.S.; Hong, W. An Iterative Method for Ocean Surface Current Retrieval by Along-track Interferometric SAR. J. Electron. Inf. Technol. 2012, 34, 2660–2665. [Google Scholar] [CrossRef]
- Pu, W. Deep SAR Imaging and Motion Compensation. IEEE Trans. Image Process. 2021, 30, 2232–2247. [Google Scholar] [CrossRef]
- Romeiser, R.; Schwäbisch, M.; Schulz-Stellenfleth, J. Study on Concepts for Radar Interferometry from Satellites for Ocean (and Land) Applications (KoRIOLiS); University of Hamburg: Hamburg, Germany, 2002. [Google Scholar]
- Zhang, Q. Design and Key Technologies of the GF-3 Satellite. Acta Geod. Cartogr. Sin. 2017, 46, 269–277. [Google Scholar]
- Pan, X.; Liao, G.; Yang, Z.; Dang, H. Sea surface current estimation using airborne circular scanning SAR with a medium grazing angle. Remote Sens. 2018, 10, 178. [Google Scholar] [CrossRef]
- Ferro-Famil, L.; Reigber, A.; Pottier, E.; Boerner, W.M. Scene characterization using sub-aperture polarimetric SAR data. IEEE Trans. Geosci. Remote Sens. 2003, 41, 2264–2276. [Google Scholar] [CrossRef]
- Bamler, R. Doppler frequency estimation and the Cramer-Rao bound. IEEE Trans. Geosci. Remote Sens. 1991, 29, 385–390. [Google Scholar] [CrossRef]
- Cumming, I.; Wong, F. Digital Signal Processing of Synthetic Aperture Radar Data: Algorithms and Implementation; Artech House Incorporated: London, UK, 2005. [Google Scholar]
- Li, W.; Huang, Y.; Yang, J.; Wu, J.; Kong, L. An Improved Radon-Transform-Based Scheme of Doppler Centroid Estimation for Bistatic Forward-Looking SAR. IEEE Geosci. Remote Sens. Lett. 2011, 8, 379–383. [Google Scholar] [CrossRef]
- Kong, Y.; Cho, B.; Kim, Y. Ambiguity-free Doppler centroid estimation technique for airborne SAR using the Radon transform. IEEE Trans. Geosci. Remote Sens. 2005, 43, 715–721. [Google Scholar] [CrossRef]
- Han, B.; Ding, C.; Zhong, L.; Liu, J.; Qiu, X.; Hu, Y.; Lei, B. The GF-3 SAR Data Processor. Sensors 2018, 18, 835. [Google Scholar] [CrossRef] [PubMed]
- Backeberg, B.C.; Bertino, L.; Johannessen, J.A. Evaluating two numerical advection schemes in HYCOM for eddy-resolving modelling of the Agulhas Current. Ocean Sci. 2009, 5, 173–190. [Google Scholar] [CrossRef]
- Seo, S.; Park, Y.-G.; Park, J.-H.; Lee, H.J.; Hirose, N.J.O.; Research, P. The Tsushima Warm Current from a high resolution ocean prediction model, HYCOM. Ocean Polar Res. 2013, 35, 135–146. [Google Scholar] [CrossRef]
- Wang, M.; Liu, Z.; Zhu, X.; Yan, X.; Zhang, Z.; Zhao, R. Origin and formation of the Ryukyu Current revealed by HYCOM reanalysis. Acta Oceanol. Sin. 2019, 38, 1–10. [Google Scholar] [CrossRef]
- Kim, J.-E.; Kim, D.-J.; Moon, W.M. Enhancement of Doppler centroid for ocean surface current retrieval from ERS-1/2 raw SAR. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Anchorage, AK, USA, 20–24 September 2004; pp. 3118–3120. [Google Scholar]
- Rossi, C.; Runge, H.; Breit, H.; Fritz, T. Surface current retrieval from TerraSAR-X data using Doppler measurements. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Honolulu, HI, USA, 25–30 July 2010; pp. 3055–3058. [Google Scholar]
- Johnsen, H.; Nilsen, V.; Engen, G.; Mouche, A.A.; Collard, F. Ocean doppler anomaly and ocean surface current from Sentinel 1 tops mode. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; pp. 3993–3996. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | Units |
|---|---|---|
| Radar Frequency | 5.4 | GHz |
| Incidence Angle | 20–60 | deg |
| Polarization | HH/HV/VH/VV | – |
| Spatial Resolution | 1–500 | m |
| Swath | 10–650 | km |
| Platform Speed | 7567 | m/s |
| Orbit Altitude | 755 | km |
| Number | Date | Center Coordinates | Orbit | Polarization | Swath |
|---|---|---|---|---|---|
| 1 | 8 May 2021 | 132.79 E, 31.53 N | Descend | HH | 30 km |
| 2 | 23 April 2021 | 129.70 E, 30.46 N | Descend | HH | 30 km |
| 3 | 15 April 2021 | 123.86 E, 25.92 N | Ascend | HH | 30 km |
| 4 | 16 November 2020 | 121.44 E, 21.75 N | Ascend | HH | 30 km |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Chong, J.; Sun, K.; Zhao, Y.; Yang, X. Measuring Ocean Surface Current in the Kuroshio Region Using Gaofen-3 SAR Data. Appl. Sci. 2021, 11, 7656. https://doi.org/10.3390/app11167656
Li Y, Chong J, Sun K, Zhao Y, Yang X. Measuring Ocean Surface Current in the Kuroshio Region Using Gaofen-3 SAR Data. Applied Sciences. 2021; 11(16):7656. https://doi.org/10.3390/app11167656
Chicago/Turabian StyleLi, Yan, Jinsong Chong, Kai Sun, Yawei Zhao, and Xue Yang. 2021. "Measuring Ocean Surface Current in the Kuroshio Region Using Gaofen-3 SAR Data" Applied Sciences 11, no. 16: 7656. https://doi.org/10.3390/app11167656
APA StyleLi, Y., Chong, J., Sun, K., Zhao, Y., & Yang, X. (2021). Measuring Ocean Surface Current in the Kuroshio Region Using Gaofen-3 SAR Data. Applied Sciences, 11(16), 7656. https://doi.org/10.3390/app11167656