2.3. Displacement Analysis: Relative Positioning
To analyze the sizes of detected movements, static observations were acquired at 1 Hz for four weeks, from 19 October 2020 to 19 November 2020. Three satellite constellations were tracked, namely, GPS, GLONASS, and Galileo. The open-source software RTKLIB (demo5_33b) was used to process the data; the adopted processing parameters are presented in
Table 3 [
31]. The established geodetic network (
Figure 1) consisted of four points and six baseline vectors. Each baseline was observed for one hour at 1 Hz, which was found to be an appropriate interval to detect displacements [
32].
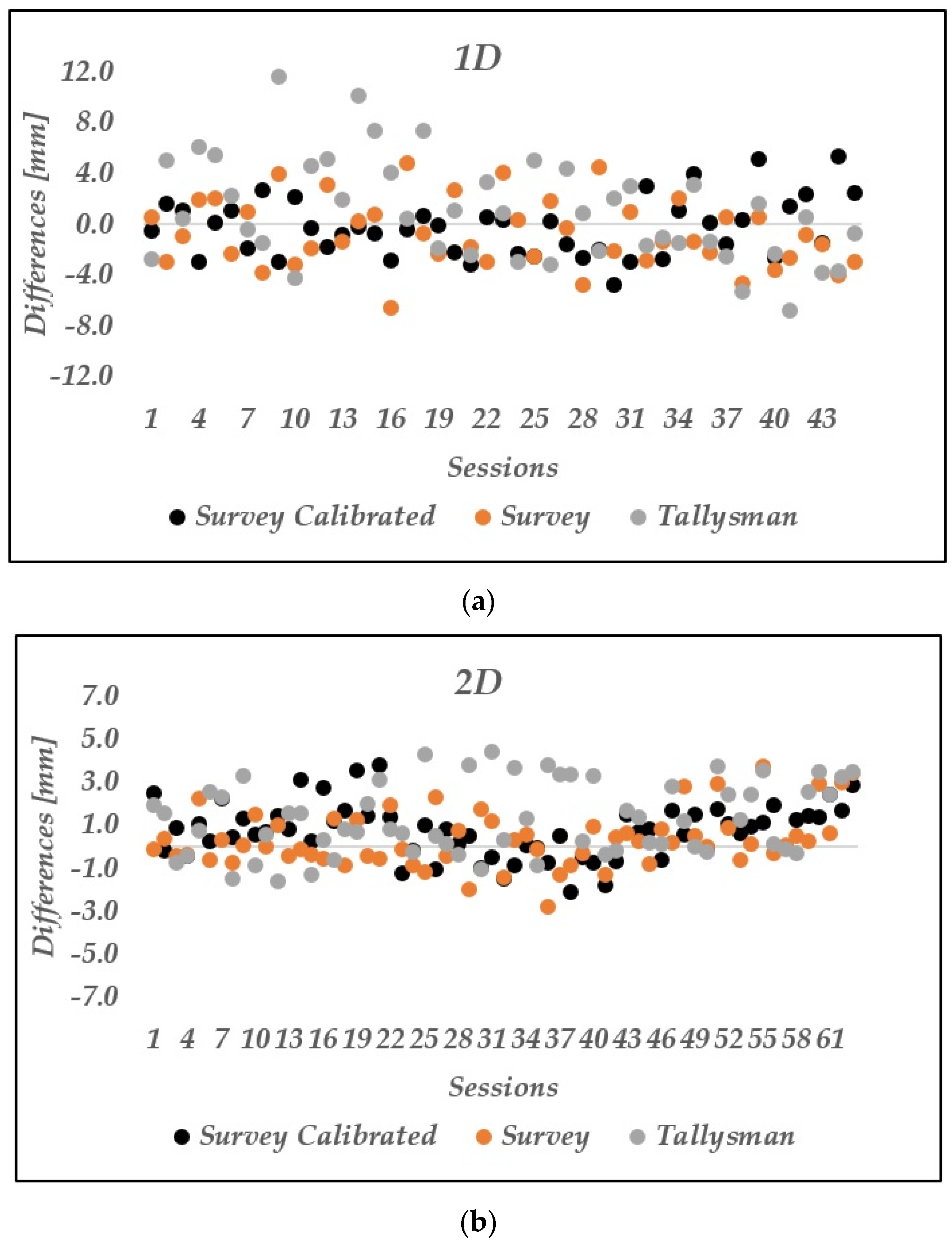
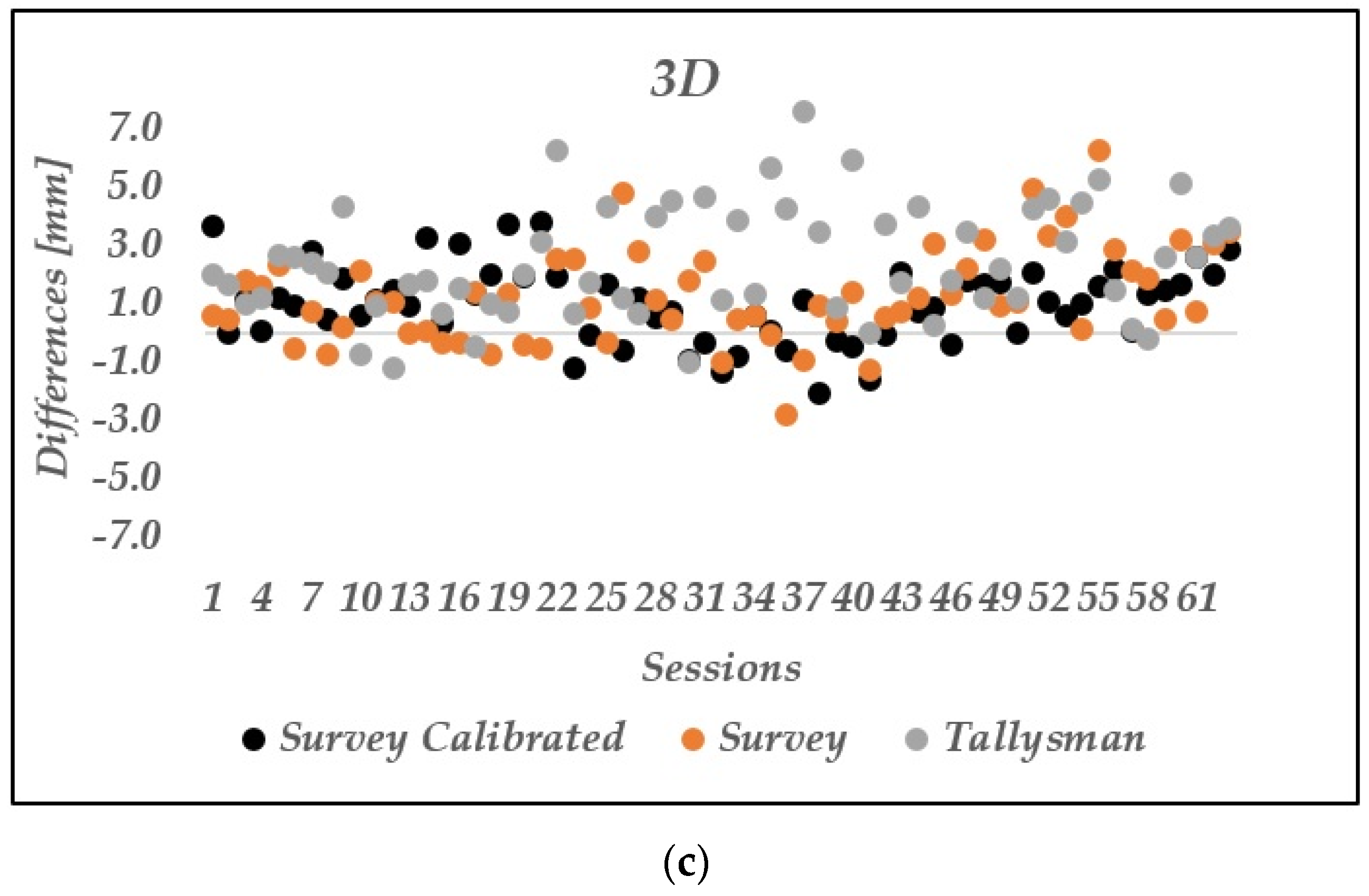
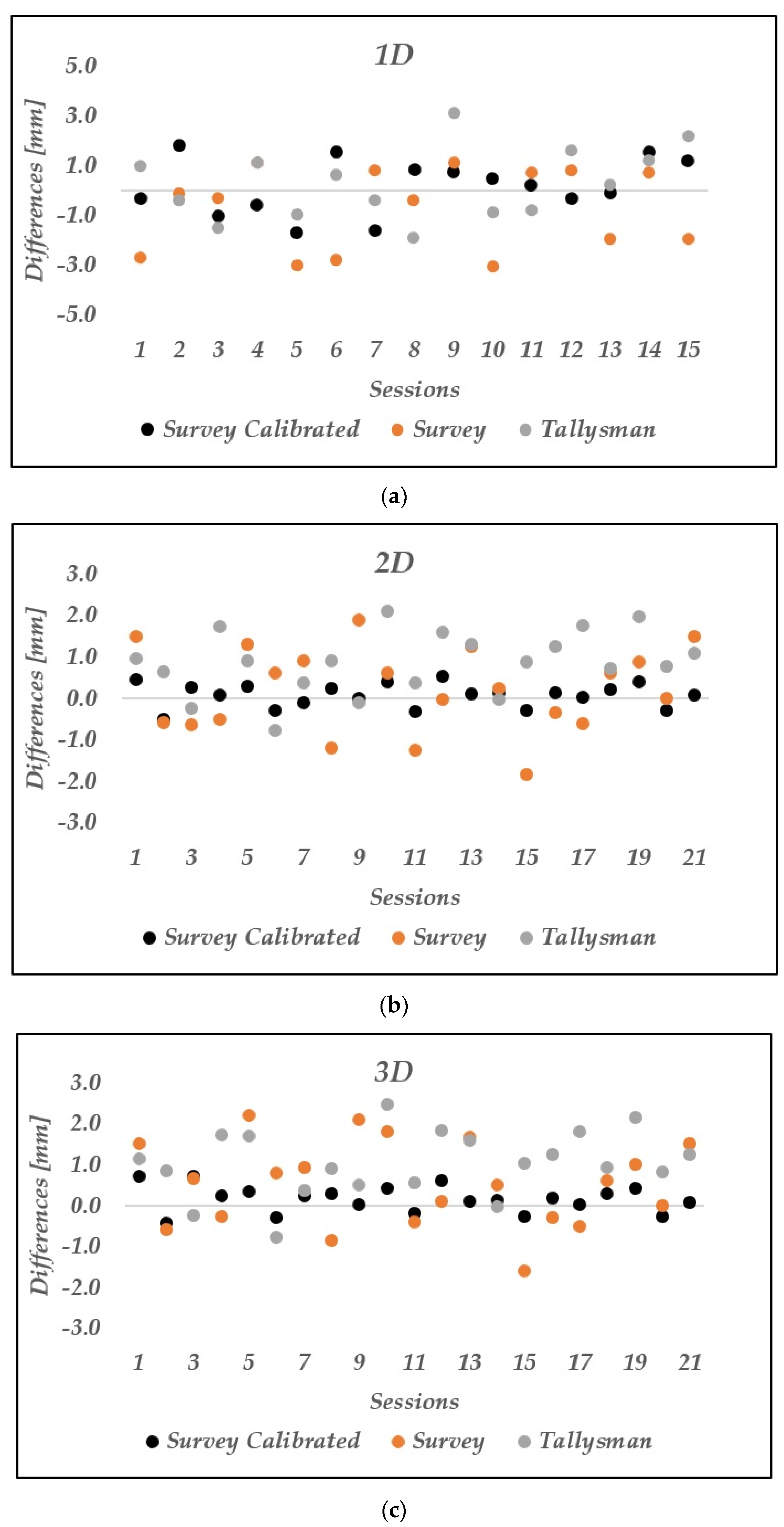
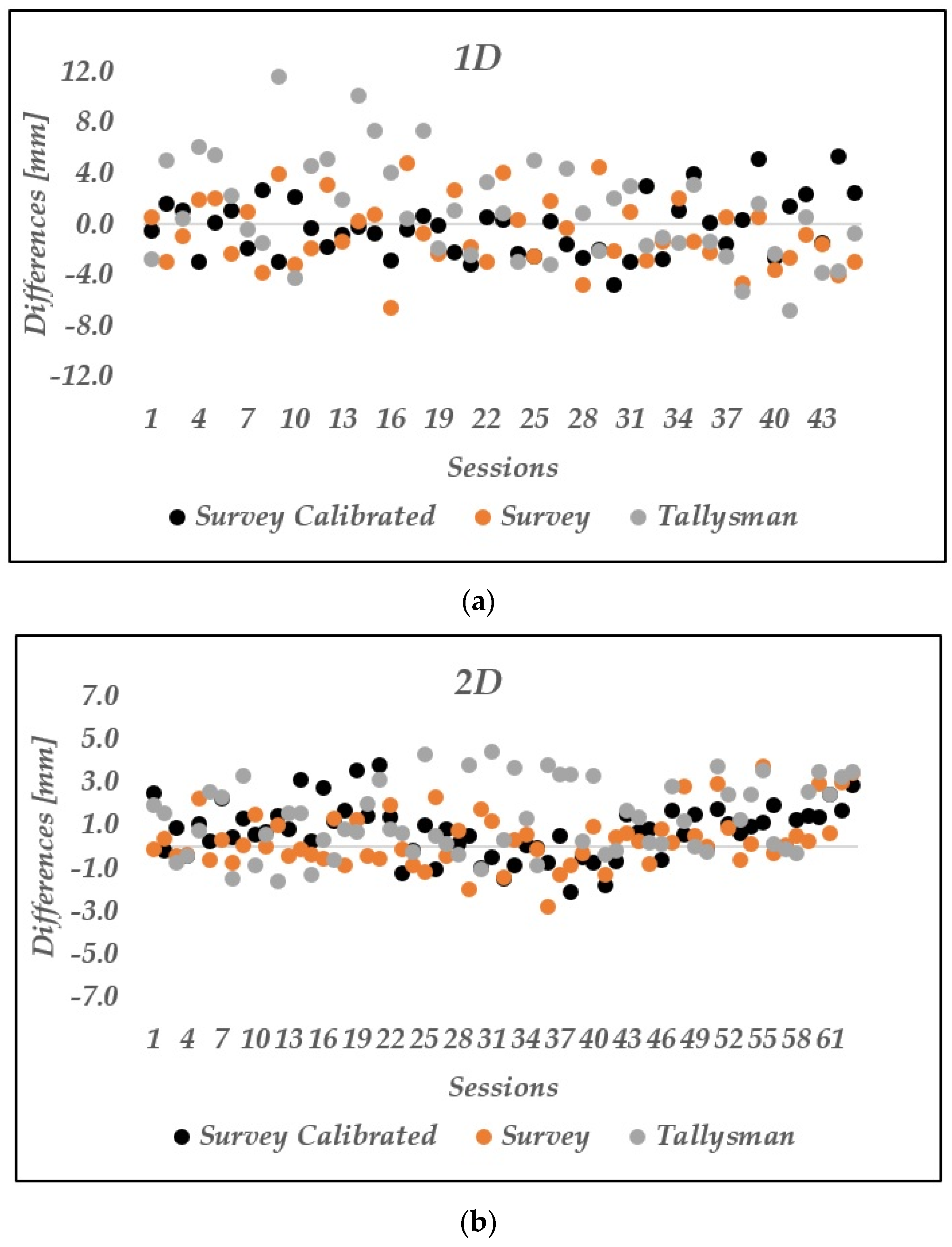
Control movements were imposed in the horizontal and vertical directions using a mechanical device and Vernier scale with high accuracy (0.05 mm) (
Figure 3). The moving antenna was set on point FGG1 and was observed in the first position for one hour, after which we moved the antenna to a new position and again observed it for one hour. The procedure was repeated 7 times. The difference between consecutive positions was 2 mm, and in total, 6 movements were observed; starting from the first (session 1) to the seventh position (session 7), the rover was moved 12 mm. The same scenario was then repeated for the vertical direction, but the imposed movements between consecutive positions were 3 mm, and from the first (session 1) to the sixth position (session 6), the rover was moved 15 mm upwards. In total, six movements were imposed in the horizontal plane, and five movements were implemented in the vertical direction. The experiment was repeated for three selected low-cost antennas in the same conditions. The movements were applied to point FGG1 only, and all other points in the GNSS network remained stable. Firstly, horizontal and vertical displacements were estimated from coordinates obtained on the basis of baseline vectors only, which were estimated from points FGG4, FGG3, and FGG2 to point FGG1. Summary statistics, such as minimum, maximum, and Mean Absolute Error (MAE) of the differences between estimated and true displacements were obtained to show the differences from true movements.
Computed baseline vectors were used afterward to define a geodetic network (
Figure 1). The geodetic network adjustment was carried out for each session to estimate displacements more accurately. In total, the geodetic network was adjusted 39 times, among which 18 adjustments were for vertical and 21 were for horizontal displacements. The points FGG2, FGG3, and FGG4 were used as datum points since we know a priori that they are stable. In the network adjustment, the following conditions were fulfilled [
33]:
where
is the residual vector for the
i-th session,
is the weight matrix for the
i-th session,
is the vector of approximate coordinates for the
i-th session,
is the parameter correction vector for the
i-th session, and
is the vector of adjusted coordinates for the
i-th session.
The data screening method (τ-test) with a significance level of 5% was used afterward for outlier detection. To analyze whether statistical equality of network precision was achieved between the corresponding sessions, the following hypothesis was established:
where
is a posteriori variance from the
i-th session, and
is a posteriori variance from the
j-th session.
To determine whether the null hypothesis could be rejected, the
F test was performed, defined as follows [
34]:
where
fi is degrees of freedom for a certain session,
ni is the number of observations for a certain session,
ui is the number of unknowns for a certain session,
d is the geodetic network datum defect, and
α is the significance level.
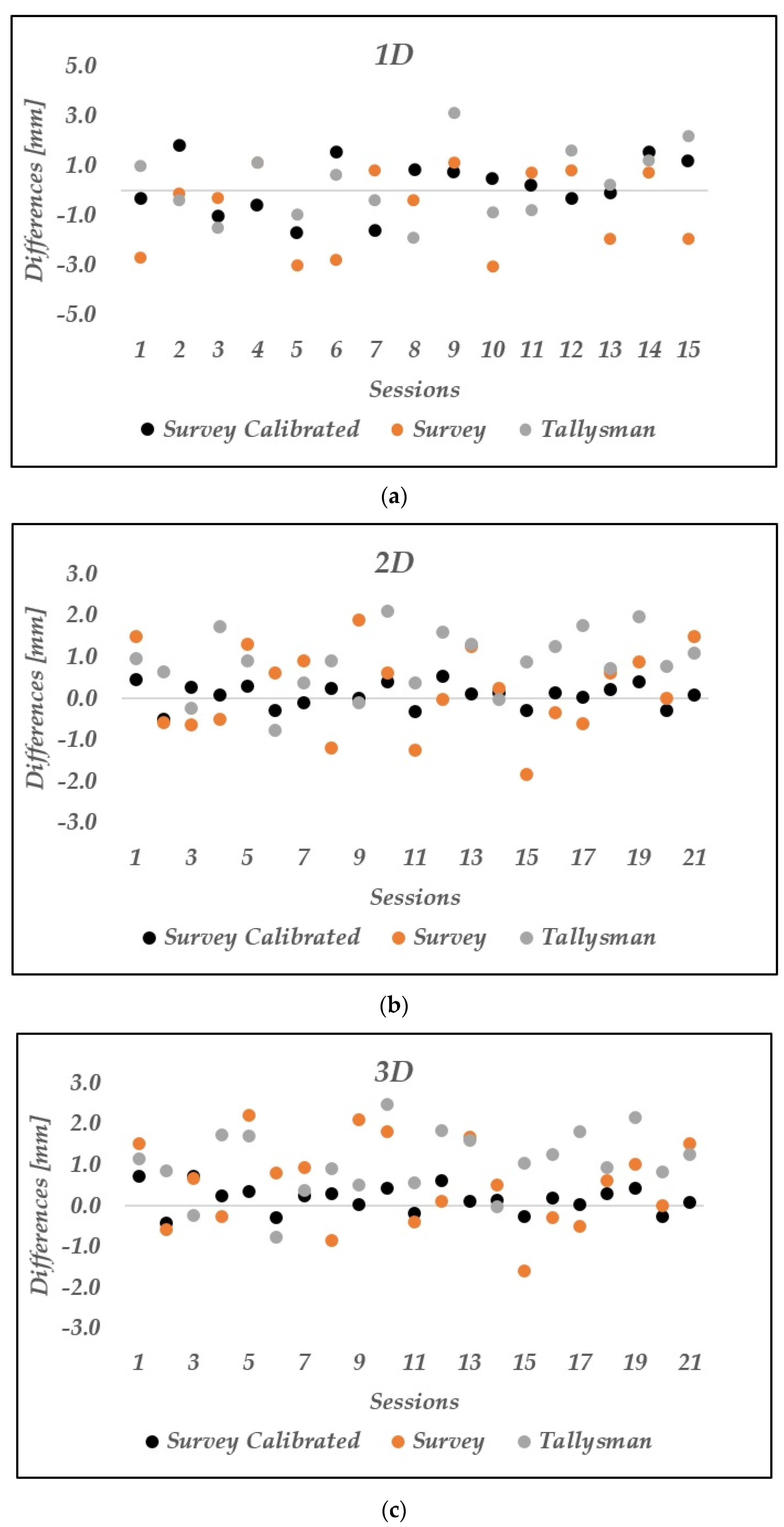
To determine the size of the detected 1D, 2D, and 3D displacements, statistical tests were used to test the hypothesis [
33,
34,
35,
36]. Displacements were analyzed by defining the following hypothesis:
H0. ; Point did not move between two sessions;
HA. ; Point moved between two sessions.
To determine whether the null hypothesis could be rejected, the following statistical test was performed [
35]:
The estimated value of the statistical test (T) was compared with its corresponding critical value from the normal (N, in the case of 1D displacements) and chi-squared (, in the case of 2D and 3D displacements) distributions. The critical values are defined based on the displacement dimension: the critical values are 1.96, 2.45, and 2.80 for 1D, 2D, and 3D displacements, respectively, for a significance level of 5% (α = 0.05).
The imposed 1D, 2D, and 3D movements were estimated as follows:
where
are FGG1 coordinates from the
i-th session in the topocentric coordinate system, and
are FGG1 coordinates from the
j-th session in the topocentric coordinate system.
The network adjustment was performed in a global coordinate system, and the variance-covariance matrix for the point FGG1 was transformed to its topocentric coordinate system as follows [
37]:
where
is the variance-covariance matrix in the global coordinate system in the
i-th session,
is the rotation matrix,
is the latitude of the point in the
i-th session, and
is the longitude of the point in the
i-th session.
The displacement precision
was estimated considering the error propagation law as follows [
38]:
Based on the error propagation law, Jacobi matrices were defined for 1D, 2D, and 3D displacements; more details can be found in [
36].
The mechanical devices could not impose spatial movements, but in order to analyze spatial displacements, the imposed horizontal movements were estimated in 3D. Movements were imposed with high accuracy (0.05 mm), and their true values are known. The MAE with respect to their true values was estimated for all displacements. Therefore, the displacement accuracy was estimated, and the difference in displacement accuracy was mainly attributed to the antenna since the other conditions (location, duration of observation, receiver type, observations) were almost the same.
2.4. Displacement Analysis: Absolute Positioning
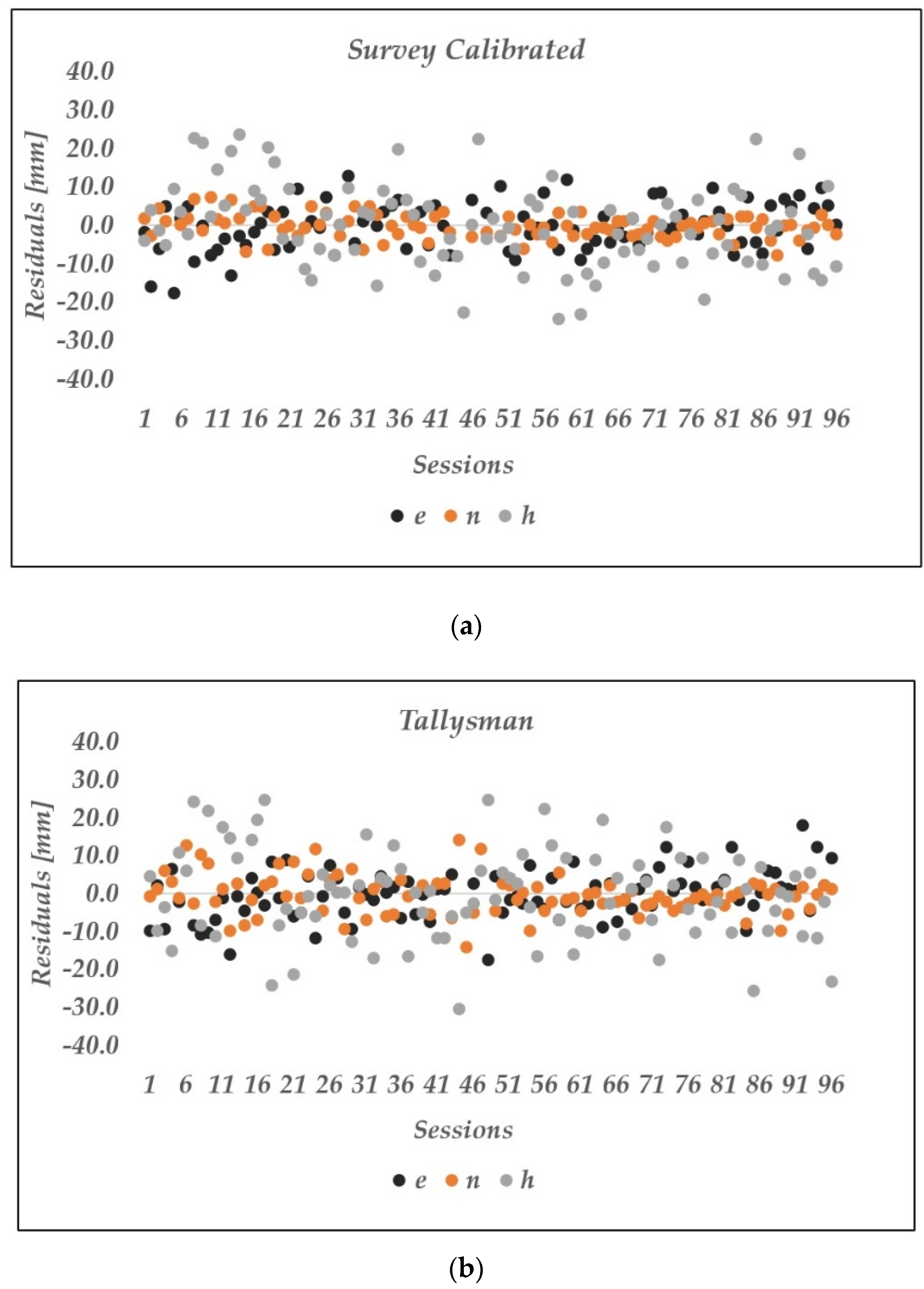
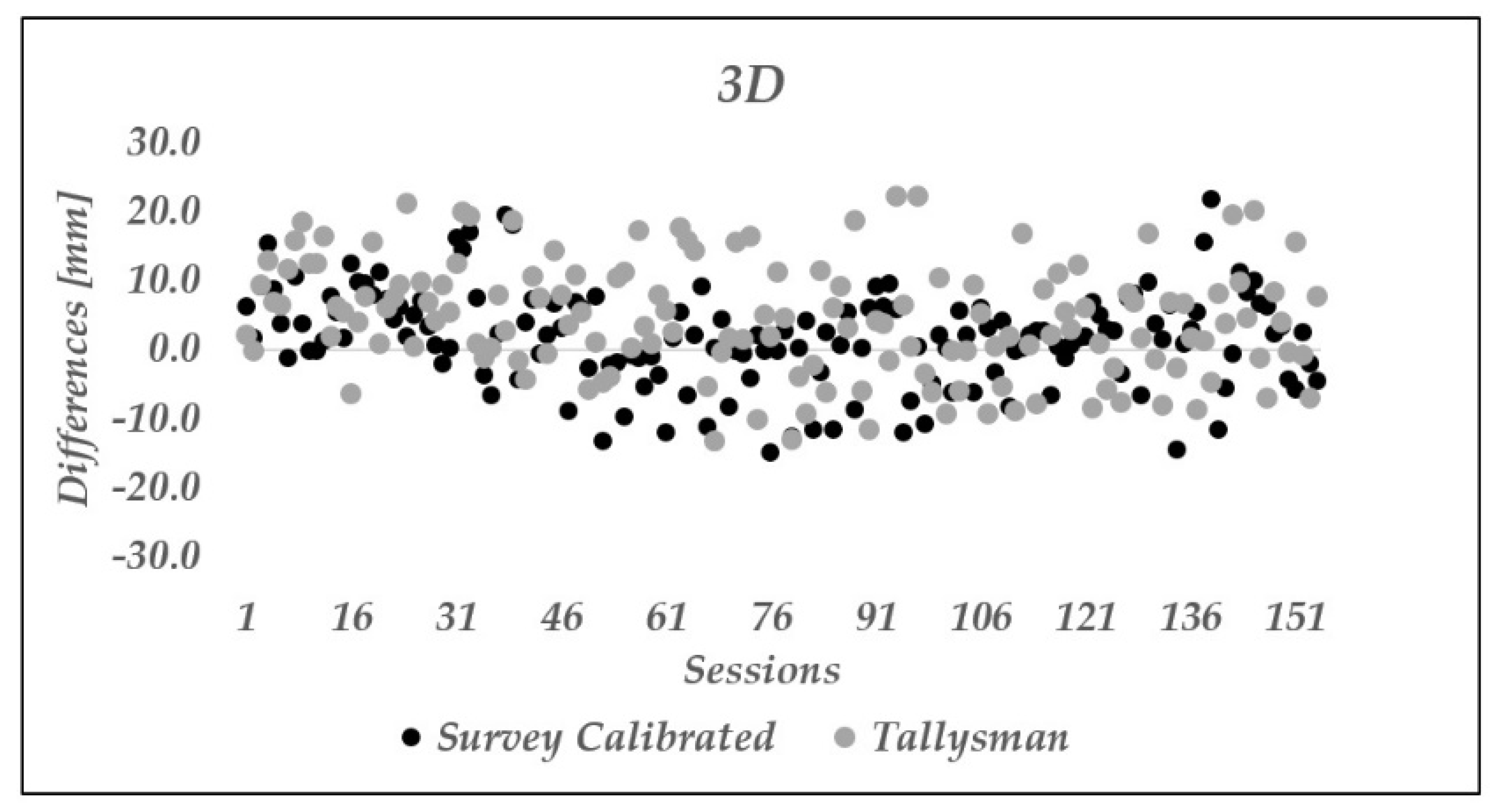
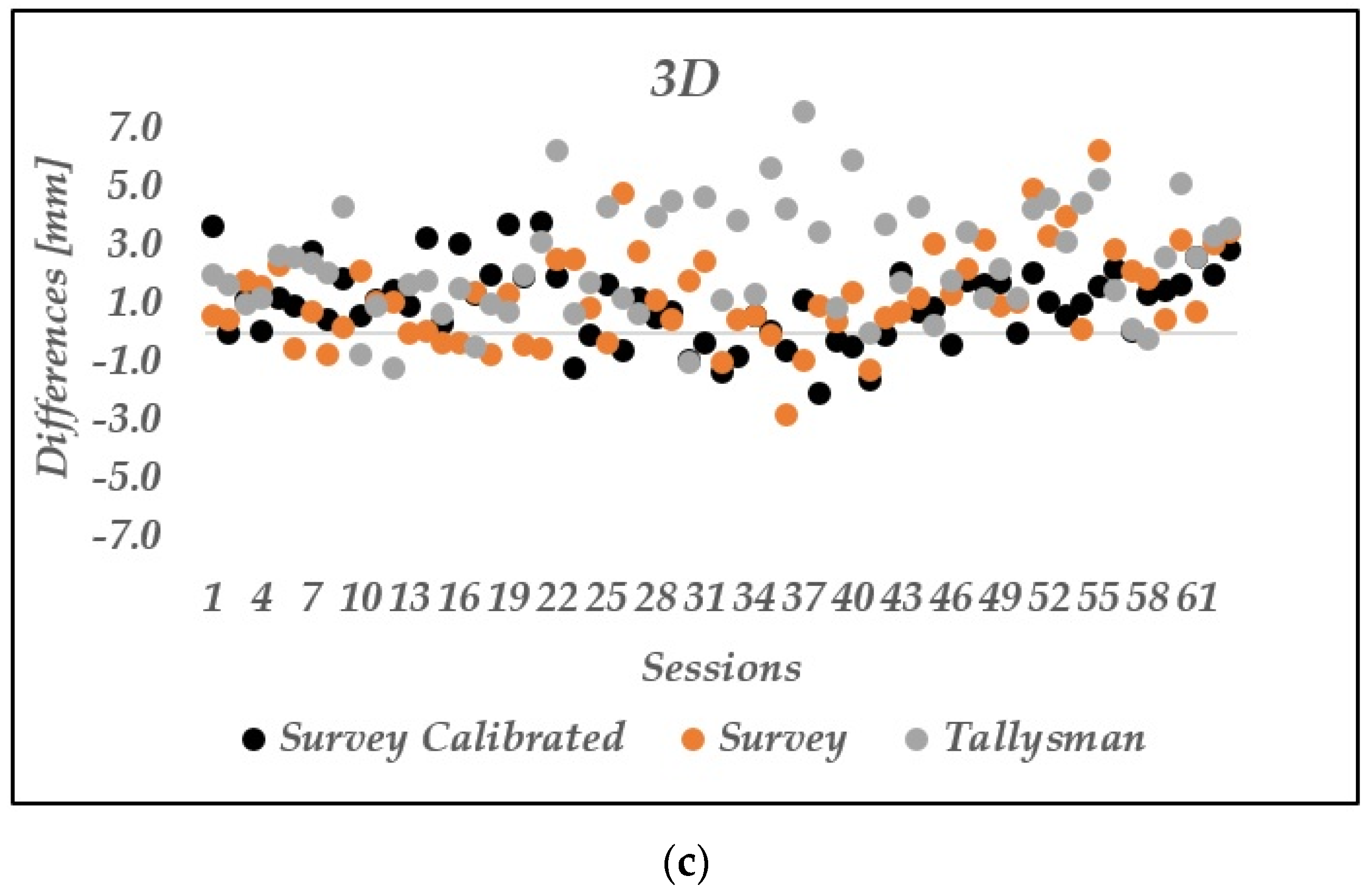
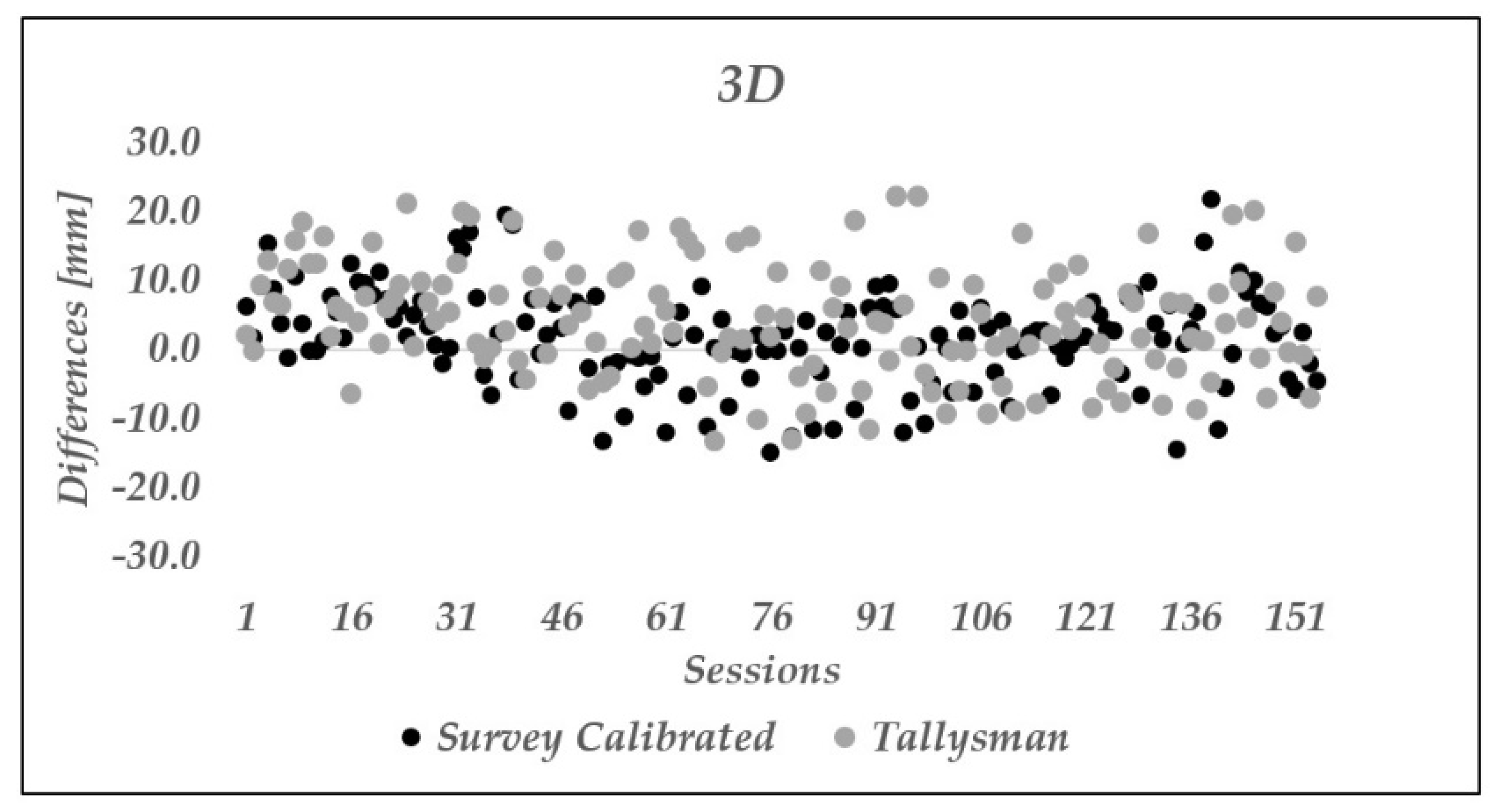
To evaluate low-cost devices in PPP mode, Survey Calibrated and Tallysman antennas were placed near point FGG1, and static observations were acquired from 1 February to 29 March 2021. In this static test, the antennas did not move. The acquired data were used to define 96 sessions, each of which contained observations for 8 h at 0.25 Hz. Then, a dynamic test was carried out in which the same mechanism was used to impose horizontal movements in steps of 10 mm. In total, seven positions were observed for 24 h, and displacements in the range of 10–60 mm were defined. As in the static test, the duration of the session was 8 h. The IGS-MGEX products, precise ephemeris (15 min, “sp3” format), and clock correction (30 s, “clk” format) were used. The satellite and receiver phase center variations were determined by using the “igs.atx” file from IGS. The Iono-Free LC and Estimated ZTD were used to eliminate the ionospheric error and the tropospheric delay, respectively. The elevation mask was set to 15°, and the DCB products from the Center of Orbit Determination in Europe were also considered.
For each session in the static test, east (e), north (n), and ellipsoid height coordinates (h) were estimated. The 3σ method was used to detect outliers, and then the RMSE, minimum, and maximum values of coordinate residuals were estimated. In monitoring applications, the movements can be in any direction; thus, we estimated them in the 3D coordinate system. The statistical hypotheses for spatial movements defined in the previous subsection were used to identify the range of detected displacements.
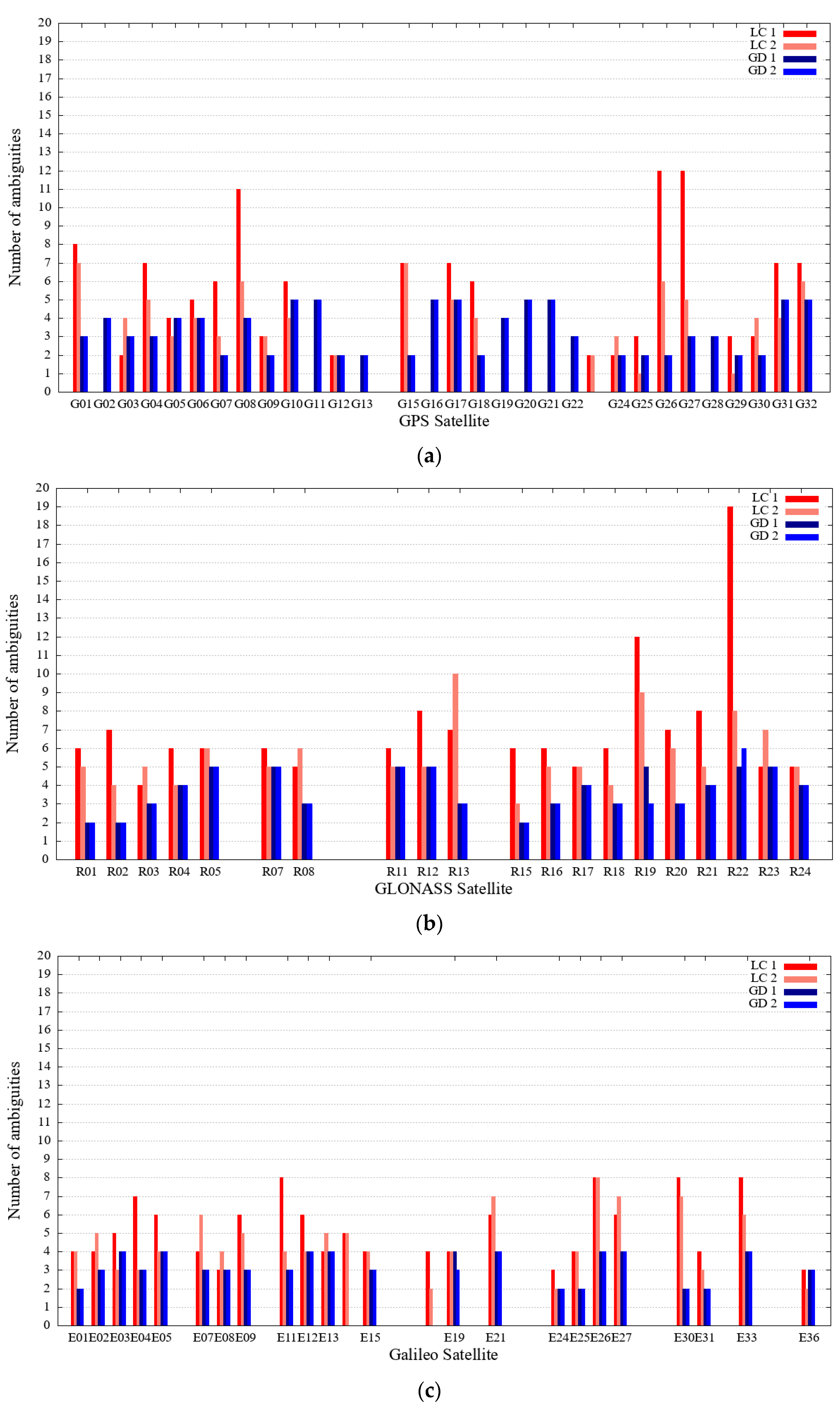
2.5. Low-Cost and Geodetic GNSS Instruments: A Comparison in Terms of Observations
To use low-cost GNSS instruments for displacement detection purposes, they must be able to perform with a similar level of quality and reliability to geodetic GNSS instruments. In the test described in this sub-section, comparisons were made between two low-cost (simpleRTK2B V1 receiver and Survey Calibrated antenna) and two geodetic (Leica GS18 receiver and LEIGS18 antenna) GNSS instruments. Data used for comparison comprise almost 48 h of static observations that were acquired at 1 Hz (
Figure 4).
The performance of all instruments used was analyzed with the help of several linear combinations of raw GNSS observations, where the geometry-free linear combination (
L4) is of particular interest. All of the previously mentioned linear combinations can also be used for cycle slip detection and repair [
39,
40,
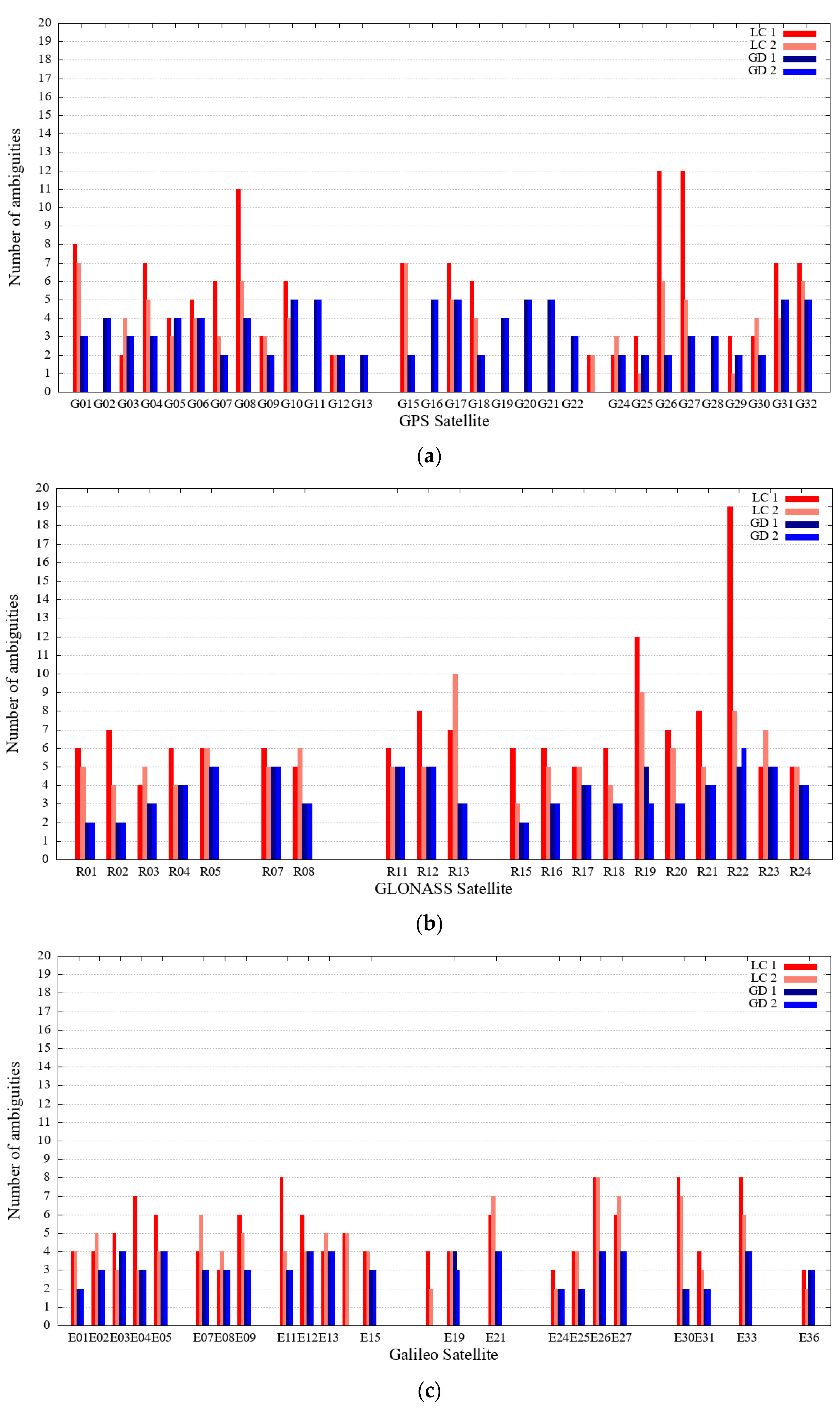
41]. One of the parameters that indicate the reliability of the GNSS instrument is the number of cycle slips (i.e., ambiguities) that occur during the survey, where the lowest possible number of cycle slips is desirable.
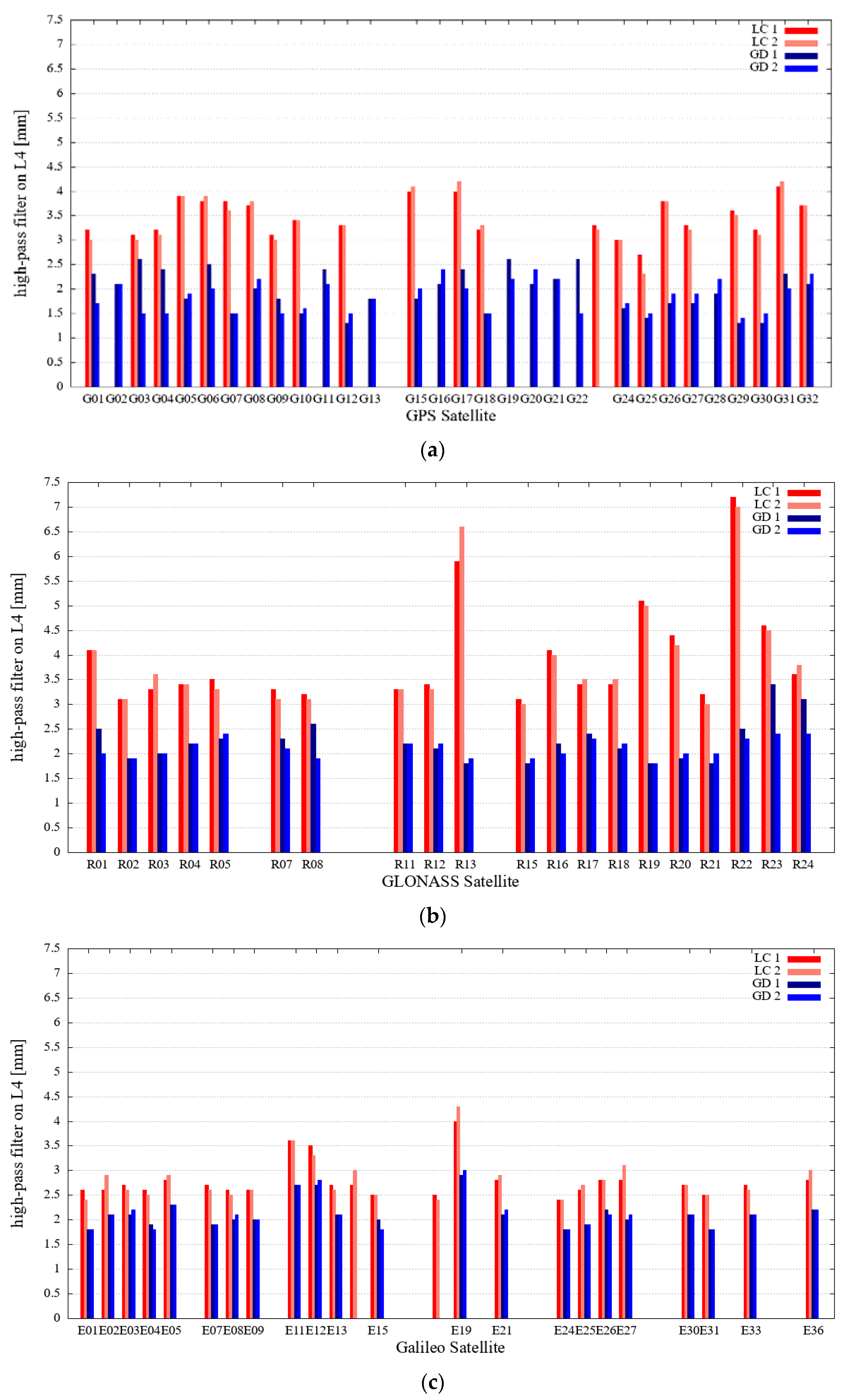
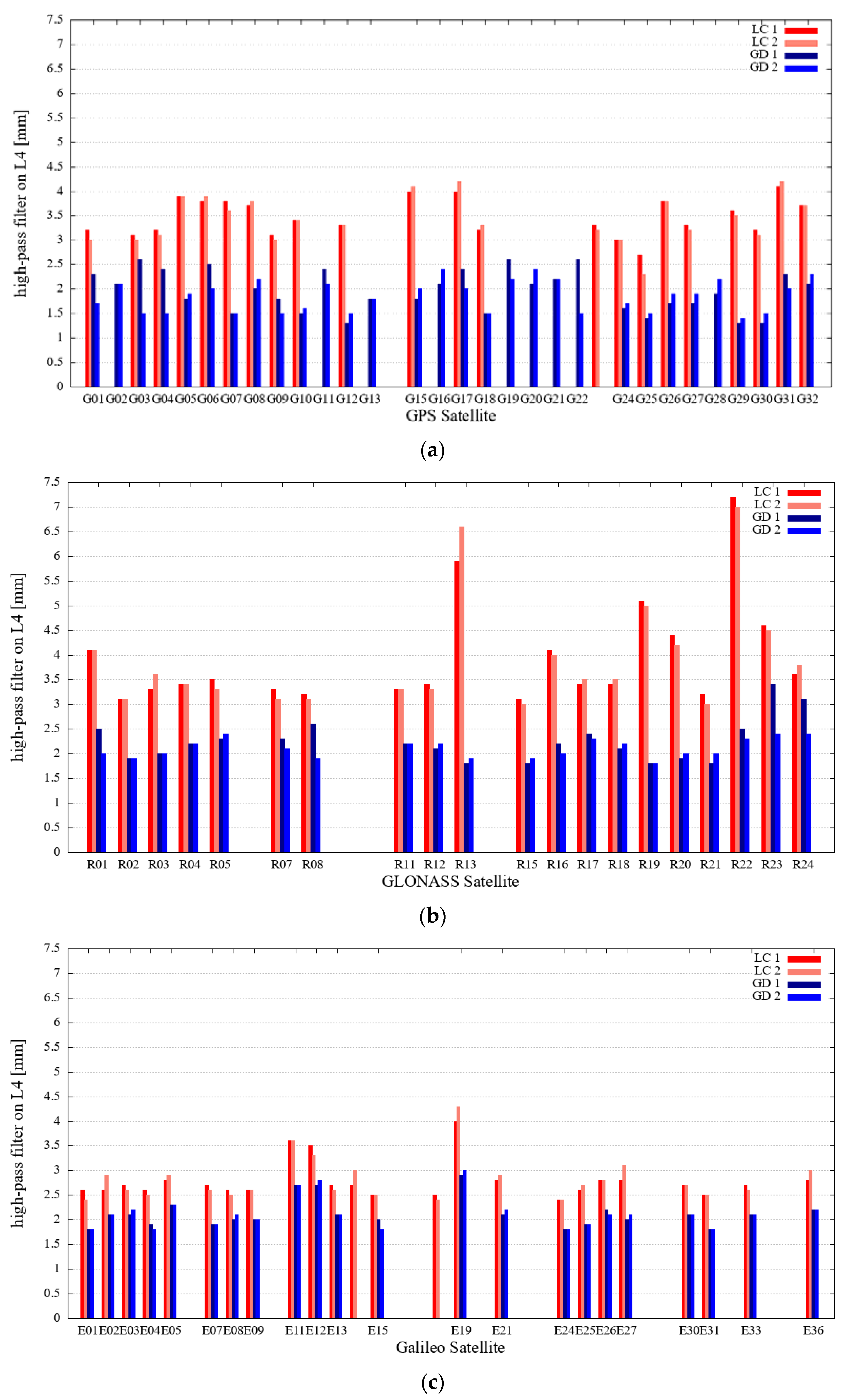
The most important quantity for precise position determination in the case of GNSS is the quality of phase observations with both carriers. The noise of phase observations can be determined with the geometry-free linear combination
L4. However, since
L4 slowly changes over time due to temporal changes in ionospheric bias, this linear combination must be filtered to remove the low-frequency trend [
41]. For each satellite tracked by four GNSS devices, the
L4 linear combination was filtered with a simple 3-point high-pass filter as follows:
where
represents the index of an epoch. The variable
contains only amplified (by
) noise of linear combination
L4.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}