
A Common Framework for Developing Robust Power-Flow Methods with High Convergence Rate






Abstract
:Featured Application
Abstract
1. Introduction
1.1. Motivation
1.2. Literature Review
1.3. Contributions and Paper Organization
- Methodologies based on the introduced solution paradigm achieve, at least, a quadratic convergence rate, which makes them competitive with standard solvers such as NR.
2. The Developed Solution Framework for PF Analysis
2.1. Analogy between NRJ and the Explicit Midpoint Method
2.2. The Novel Family of Robust PF Techniques
2.3. Embedded Formulation
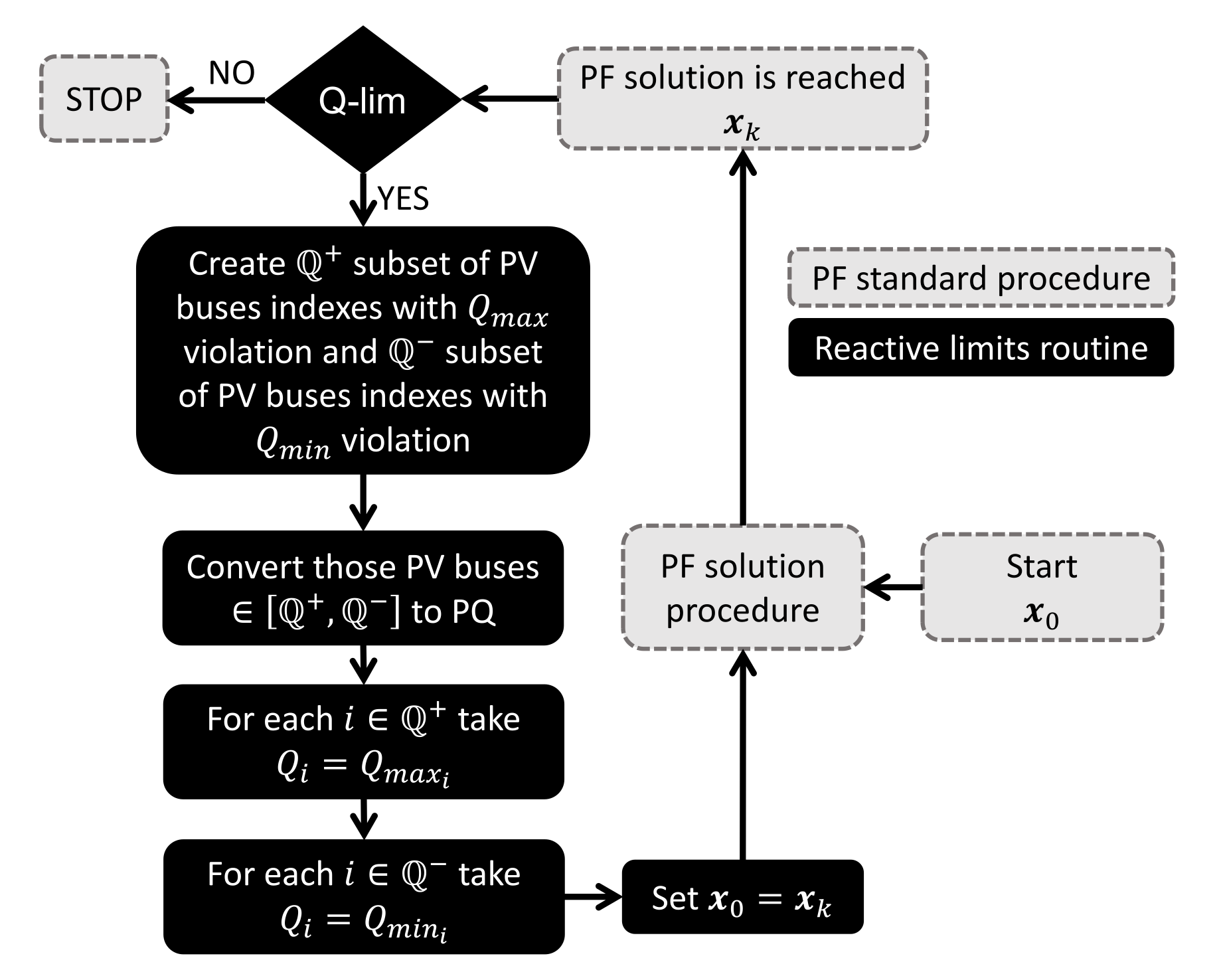
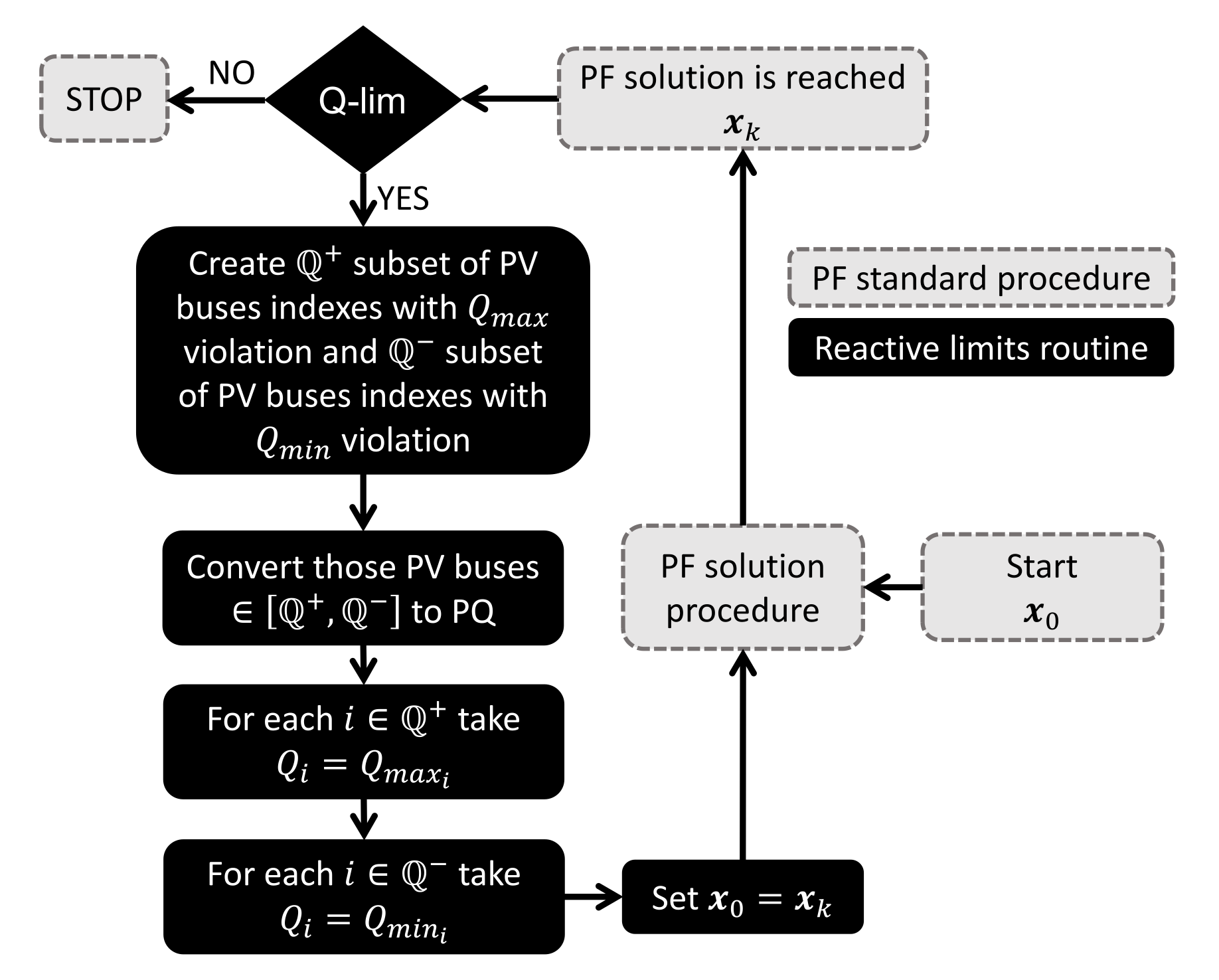
2.4. Handling Equipment Limits
2.5. Stability of the Developed Solution Paradigms
- Sink: if all the eigenvalues of the Jacobian of have a negative real part.
- Source: if at least one of the eigenvalues of the Jacobian of has a positive real part.
3. Developed PF Solvers
| Algorithm 1: Developed PF solution techniques |
| 1: Set iteration counter: |
| 2: Initial variable guess: |
| 3: # Iterations |
| 4: while do |
| 5: Solve (23) # or (24) |
| 6: Update iteration counter: |
| 7: if then |
| 8: break # fail |
| 9: end if |
| 10: end do |
| 11: return solution |
4. Numerical Experiments
4.1. Studied Systems
4.2. Convergence Rates for Base Cases
4.3. Convergence Rates with Reactive Limits
4.4. Solution Times
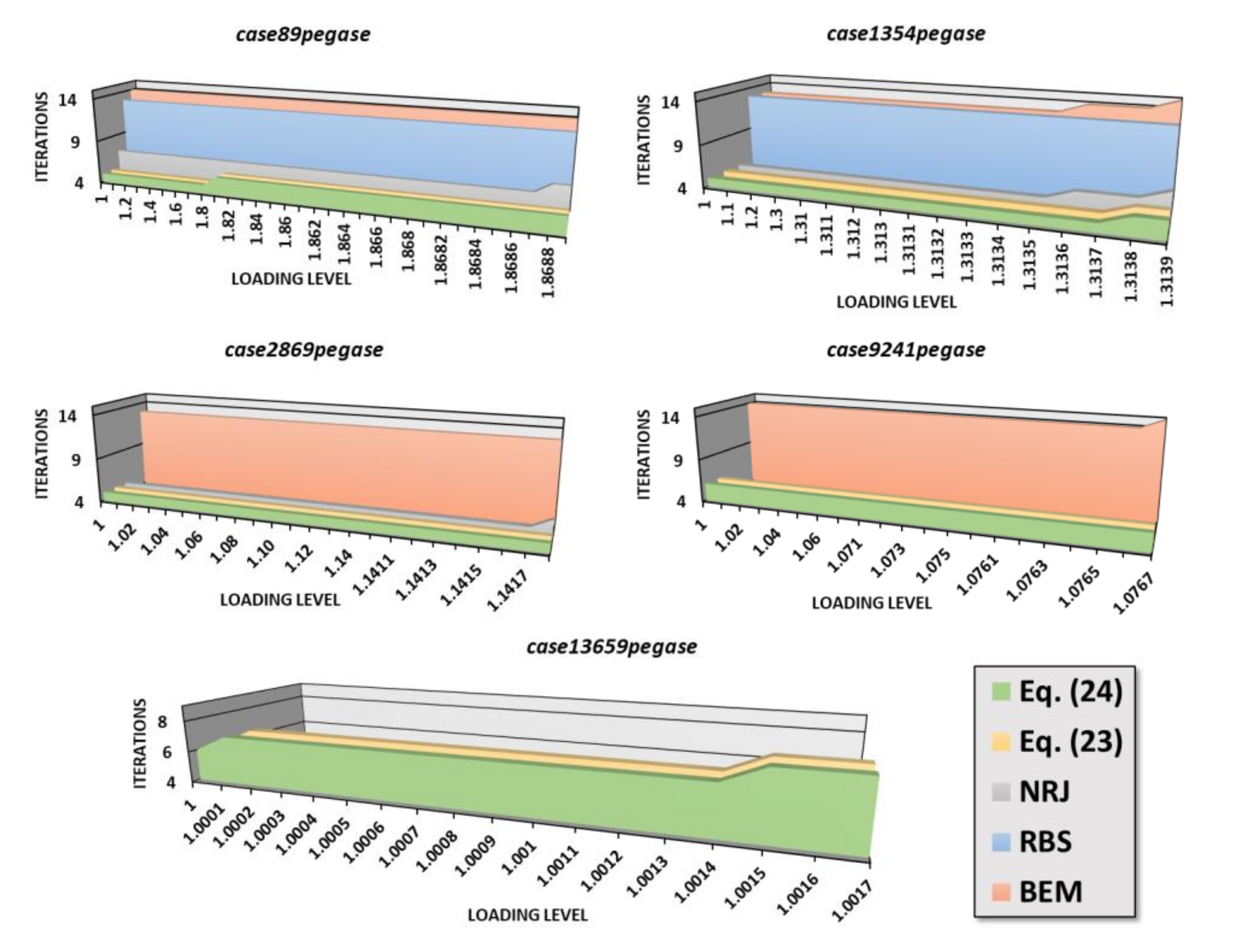
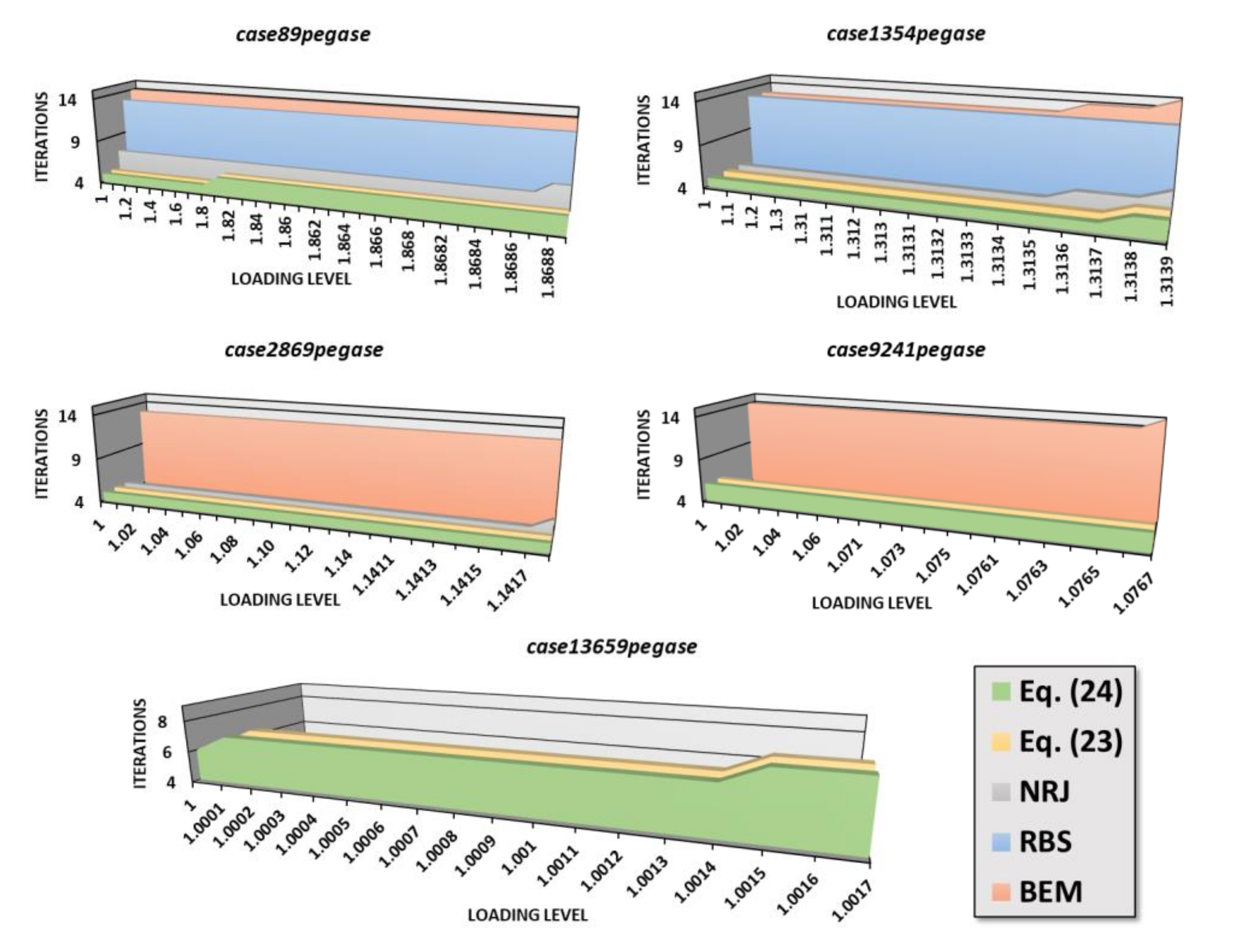
4.5. Influence of the Loading Level
5. Conclusions and Future Works
- The influence of the step size vanishes from the formulation, which means that the developed solution paradigm is intrinsically robust.
- High convergence rates can be achieved, even higher than two.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Proof of Cubic Convergence of the Developed Solvers
References
- Milano, F. Continuous Newton’s Method for Power Flow Analysis. IEEE Trans. Power Syst. 2009, 24, 50–57. [Google Scholar] [CrossRef]
- Xie, N.; Torelli, F.; Bompard, E.; Vaccaro, A. Dynamic computing paradigm for comprehensive power flow analysis. IET Gener. Transmiss. Distrib. 2013, 7, 832–842. [Google Scholar] [CrossRef]
- Iwamoto, S.; Tamura, Y. A load flow calculation method for ill-conditioned power systems. IEEE Trans. Power Appar. Syst. 1981, PAS-100, 1736–1743. [Google Scholar] [CrossRef]
- Milano, F. Power System Modelling and Scripting; Springer: New York, NY, USA, 2010. [Google Scholar]
- Braz, L.M.C.; Castro, C.A.; Murati, C.A.F. A critical evaluation of step size optimization based load flow methods. IEEE Trans. Power Syst. 2000, 15, 202–207. [Google Scholar] [CrossRef]
- Lagace, P.J. Power flow methods for improving convergence. In Proceedings of the IECON 2012—38th Annual Conference on IEEE Industrial Electronics Society, Montreal, QC, USA, 25–28 October 2012; pp. 1387–1392. [Google Scholar] [CrossRef]
- Tostado-Véliz, M.; Kamel, S.; Jurado, F. Development of combined Runge–Kutta Broyden’s load flow approach for well- and ill-conditioned power systems. IET Gener. Transmiss. Distrib. 2018, 12, 5723–5729. [Google Scholar] [CrossRef]
- Tostado-Véliz, M.; Kamel, S.; Jurado, F. Development of different load flow methods for solving large-scale ill-conditioned systems. Int. Trans. Elect. Energy Syst. 2019, 29, e2784. [Google Scholar] [CrossRef]
- Tostado-Véliz, M.; Kamel, S.; Jurado, F. A Robust Power Flow Algorithm Based on Bulirsch-Stoer Method. IEEE Trans. Power Syst. 2019, 34, 3081–3089. [Google Scholar] [CrossRef]
- Tostado-Véliz, M.; Kamel, S.; Jurado, F. Comparison of various robust and efficient load-flow techniques based on Runge-Kutta formulas. Elect. Power Syst. Res. 2019, 174, 105881. [Google Scholar] [CrossRef]
- Tostado-Véliz, M.; Kamel, S.; Jurado, F. A powerful power-flow method based on Composite Newton-Cotes formula for ill-conditioned power systems. Int. J. Elect. Power Energy Syst. 2020, 116, 105558. [Google Scholar] [CrossRef]
- Milano, F. Implicit Continuous Newton Method for Power Flow Analysis. IEEE Trans. Power Syst. 2019, 34, 3309–3311. [Google Scholar] [CrossRef]
- Xie, N.; Bompard, E.; Napoli, R.; Torelli, F. Widely convergent method for finding solutions of simultaneous nonlinear equations. Elect. Power Syst. Res. 2012, 83, 9–18. [Google Scholar] [CrossRef]
- Milano, F. Analogy and Convergence of Levenberg’s and Lyapunov-Based Methods for Power Flow Analysis. IEEE Trans. Power Syst. 2016, 31, 1663–1664. [Google Scholar] [CrossRef]
- Pourbagher, R.; Derakhshandeh, S.Y. Application of high-order Levenberg-Marquardt method for solving the power flow problem in the ill-conditioned systems. IET Gener. Transmiss. Distrib. 2016, 10, 3017–3022. [Google Scholar] [CrossRef]
- Tostado, M.; Kamel, S.; Jurado, F. An effective load-flow approach based on Gauss-Newton formulation. Int. J. Elect. Power Energy Syst. 2019, 113, 573–581. [Google Scholar] [CrossRef]
- Rao, S.; Feng, Y.; Tylavsky, D.J.; Subramanian, M.K. The Holomorphic Embedding Method Applied to the Power-Flow Problem. IEEE Trans. Power Syst. 2016, 31, 3816–3828. [Google Scholar] [CrossRef]
- Tostado, M.; Kamel, S.; Jurado, F. Several robust and efficient load flow techniques based on combined approach for ill-conditioned power systems. Int. J. Elect. Power Energy Syst. 2019, 110, 349–356. [Google Scholar] [CrossRef]
- Butcher, J.C. Numerical Methods for Ordinary Differential Equations; Wiley: Hoboken, NJ, USA, 2003. [Google Scholar]
- Tostado-Véliz, M.; Kamel, S.; Jurado, F. Promising Framework Based on Multistep Continuous Newton Scheme for Developing Robust PF Methods. IET Gener. Transmiss. Distrib. 2020, 14, 265–274. [Google Scholar] [CrossRef]
- Tostado-Véliz, M.; Kamel, S.; Jurado, F. Robust and efficient approach based on Richardson extrapolation for solving badly initialised/ill-conditioned power-flow problems. IET Gener. Transmiss. Distrib. 2019, 13, 3524–3533. [Google Scholar] [CrossRef]
- Zimmerman, R.D.; Murillo-Sánchez, C.E.; Thomas, R.J. Matpower: Steady-State Operations, Planning and Analysis Tools for Power Systems Research and Education. IEEE Trans. Power Syst. 2011, 26, 12–19. [Google Scholar] [CrossRef] [Green Version]
- Josz, C.; Fliscounakis, S.; Maeght, J.; Panciatici, P. AC power flow data in MATPOWER and QCQP format: ITesla, RTE snapshots, and PEGASE. arXiv 2016, arXiv:1603.01533. Available online: http://arxiv.org/abs/1603.01533 (accessed on 1 June 2021).
- Fliscounakis, S.; Panciatici, P.; Capitanescu, F.; Wehenkel, L. Contingency Ranking With Respect to Overloads in Very Large Power Systems Taking Into Account Uncertainty, Preventive, and Corrective Actions. IEEE Trans. Power Syst. 2013, 28, 4909–4917. [Google Scholar] [CrossRef] [Green Version]
- Modified Matpower EU PEGASE Systems. Available online: https://zenodo.org/record/3553615 (accessed on 1 June 2021). [CrossRef]
- Ajjarapu, V.; Christy, C. The continuation power flow: A tool for steady state voltage stability analysis. IEEE Trans. Power Syst. 1992, 7, 416–423. [Google Scholar] [CrossRef]
- Cordero, A.; Villalba, E.G.; Torregrosa, J.R.; Triguero-Navarro, P. Convergence and Stability of a Parametric Class of Iterative Schemes for Solving Nonlinear Systems. Mathematics 2021, 9, 86. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
| Solver | Analogy | ||
|---|---|---|---|
| NR (2) | Explicit Euler | ||
| NRJ (6) | Explicit Midpoint | ||
| (23) | Explicit Heun | ||
| (24) | Embedded Heun–Euler |
| System | Buses | Branches | Generators | Load | ||
|---|---|---|---|---|---|---|
| MW | MVar | |||||
| 89-bus | 89 | 210 | 12 | 5727.9 | 1374.9 | 165 |
| 1354-bus | 1354 | 1991 | 260 | 73,059.7 | 13,401.4 | 2447 |
| 2869-bus | 2869 | 4582 | 510 | 132,437.3 | 29,007.8 | 5227 |
| 9241-bus | 9241 | 16,049 | 1445 | 312,354.1 | 73,581.6 | 17,036 |
| 13659-bus | 13,659 | 20,467 | 4092 | 381,431.9 | 98,523.4 | 23,225 |
| Method | 89-Bus | 1354-Bus | 2869-Bus | 9241-Bus | 13659-Bus |
|---|---|---|---|---|---|
| NR | Fail | Fail | Fail | Fail | Fail |
| RBS | 13 | 13 | Fail | Fail | Fail |
| BEM | 14 | 13 | 13 | 14 | 14 * |
| NRJ | 7 | 5 | 5 | Fail | Fail |
| Equation (23) | 5 | 5 | 5 | 6 | 6 |
| Equation (24) | 5 | 5 | 5 | 6 | 6 |
| Method | 89-Bus | 1354-Bus | 2869-Bus | 9241-Bus | 13659-Bus |
|---|---|---|---|---|---|
| NR | Fail | Fail | Fail | Fail | Fail |
| RBS | 13 | 32 | Fail | Fail | Fail |
| BEM | 14 | 32 | 40 | 42 | 25 * |
| NRJ | 7 | 8 | 9 | Fail | Fail |
| Equation (23) | 5 | 8 | 9 | 10 | 7 |
| Equation (24) | 5 | 8 | 9 | 10 | 7 |
| Method | 89-Bus | 1354-Bus | 2869-Bus | 9241-Bus | 13659-Bus |
|---|---|---|---|---|---|
| RBS | 0.05 | 0.34 | -- | -- | -- |
| BEM | 0.02 | 0.11 | 0.25 | 0.87 | 1.17 |
| NRJ | 0.02 | 0.08 | 0.18 | -- | -- |
| Equation (23) | 0.01 | 0.08 | 0.18 | 0.72 | 1.00 |
| Equation (24) | 0.01 | 0.08 | 0.18 | 0.72 | 1.00 |
| Method | 89-Bus | 1354-Bus | 2869-Bus | 9241-Bus | 13659-Bus |
|---|---|---|---|---|---|
| RBS | 0.05 | 0.88 | -- | -- | -- |
| BEM | 0.02 | 0.28 | 0.76 | 2.68 | 2.08 |
| NRJ | 0.02 | 0.13 | 0.33 | -- | -- |
| Equation (23) | 0.01 | 0.13 | 0.33 | 1.24 | 1.15 |
| Equation (24) | 0.01 | 0.13 | 0.33 | 1.24 | 1.15 |
| Method | 89-Bus | 1354-Bus | 2869-Bus | 9241-Bus | 13659-Bus |
|---|---|---|---|---|---|
| RBS | 32 | 32 | -- | -- | -- |
| BEM | 14 | 13 | 13 | 14 | 14 |
| NRJ | 14 | 10 | 10 | -- | -- |
| Equation (23) | 10 | 10 | 10 | 12 | 12 |
| Equation (24) | 10 | 10 | 10 | 12 | 12 |
| Method | 89-Bus | 1354-Bus | 2869-Bus | 9241-Bus | 13659-Bus |
|---|---|---|---|---|---|
| RBS | 32 | 90 | -- | -- | -- |
| BEM | 14 | 64 | 80 | 84 | 50 |
| NRJ | 14 | 16 | 18 | -- | -- |
| Equation (23) | 10 | 16 | 18 | 20 | 14 |
| Equation (24) | 10 | 16 | 18 | 20 | 14 |
| Method | 89-Bus | 1354-Bus | 2869-Bus | 9241-Bus | 13659-Bus |
|---|---|---|---|---|---|
| RBS | 13 | 13 | -- | -- | -- |
| BEM | 14 | 15 | 13 | 15 | -- |
| NRJ | 8 | 7 | 6 | -- | -- |
| Equation (23) | 6 | 6 | 5 | 6 | 8 |
| Equation (24) | 6 | 6 | 5 | 6 | 8 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tostado-Véliz, M.; Kamel, S.; Escamez, A.; Vera, D.; Jurado, F. A Common Framework for Developing Robust Power-Flow Methods with High Convergence Rate. Appl. Sci. 2021, 11, 6147. https://doi.org/10.3390/app11136147
Tostado-Véliz M, Kamel S, Escamez A, Vera D, Jurado F. A Common Framework for Developing Robust Power-Flow Methods with High Convergence Rate. Applied Sciences. 2021; 11(13):6147. https://doi.org/10.3390/app11136147
Chicago/Turabian StyleTostado-Véliz, Marcos, Salah Kamel, Antonio Escamez, David Vera, and Francisco Jurado. 2021. "A Common Framework for Developing Robust Power-Flow Methods with High Convergence Rate" Applied Sciences 11, no. 13: 6147. https://doi.org/10.3390/app11136147
APA StyleTostado-Véliz, M., Kamel, S., Escamez, A., Vera, D., & Jurado, F. (2021). A Common Framework for Developing Robust Power-Flow Methods with High Convergence Rate. Applied Sciences, 11(13), 6147. https://doi.org/10.3390/app11136147