A New SORM Method for Structural Reliability with Hybrid Uncertain Variables



Abstract
1. Introduction
2. The Analysis of the Structural Reliability Using the Traditional SORM
3. UPSORM: The New SORM in Polar for Random and Interval Uncertainty
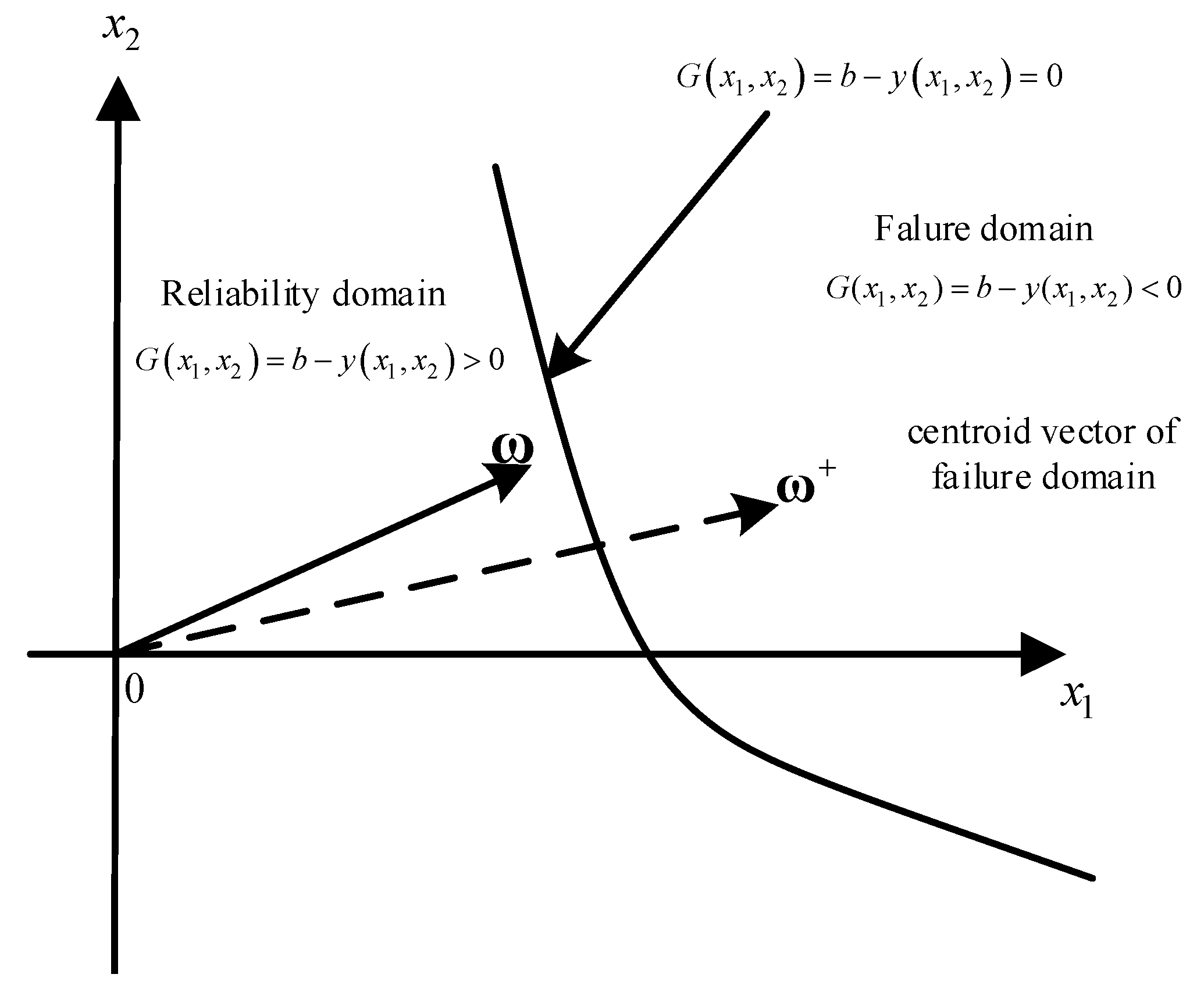
3.1. Polar Transformation For State Function with Randomness and Intervals
3.2. UPSORM: SORM in Polar for Random and Interval Uncertainty
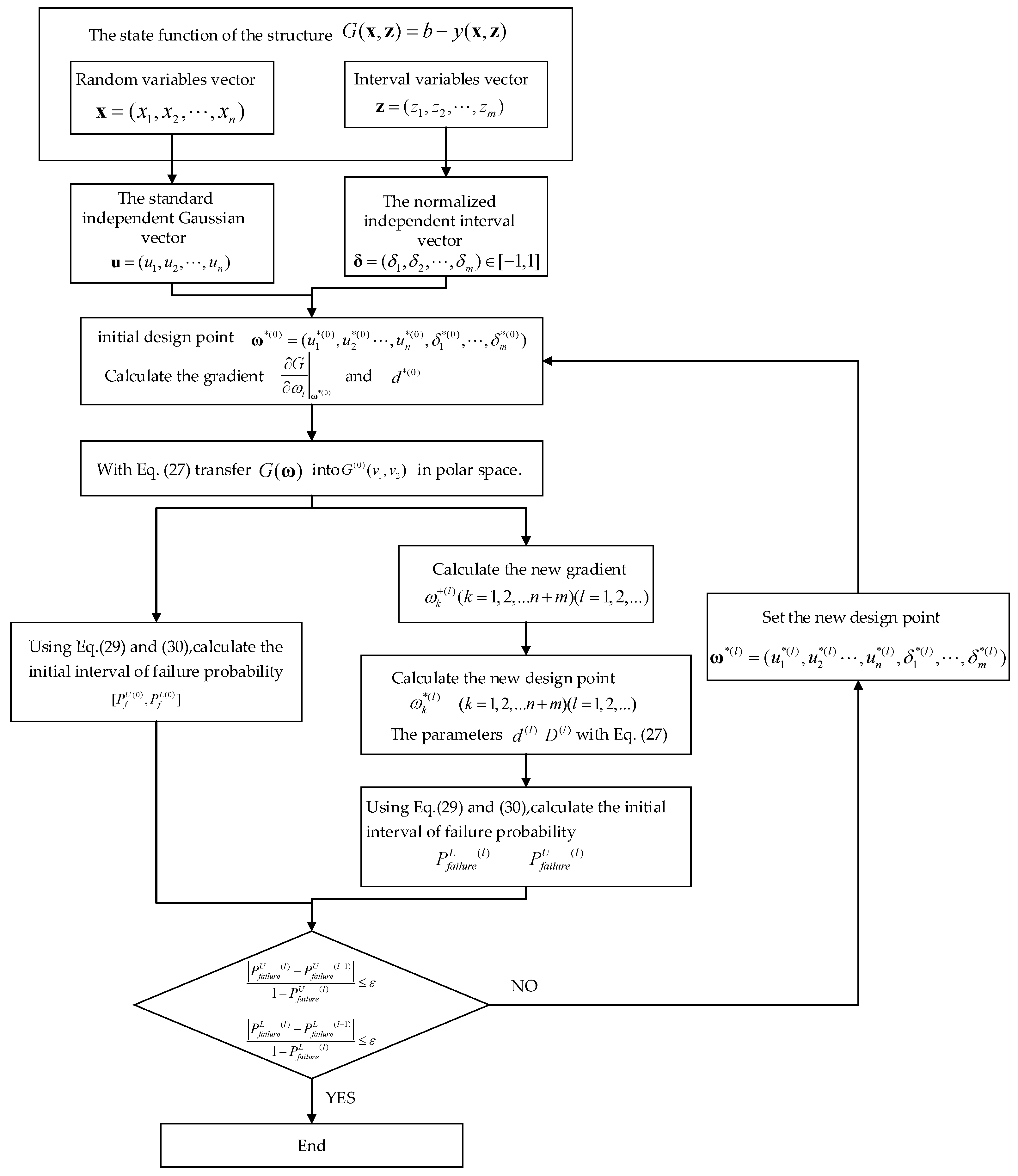
3.3. Implementation Details
4. Numerical Examples
4.1. A Toy Example
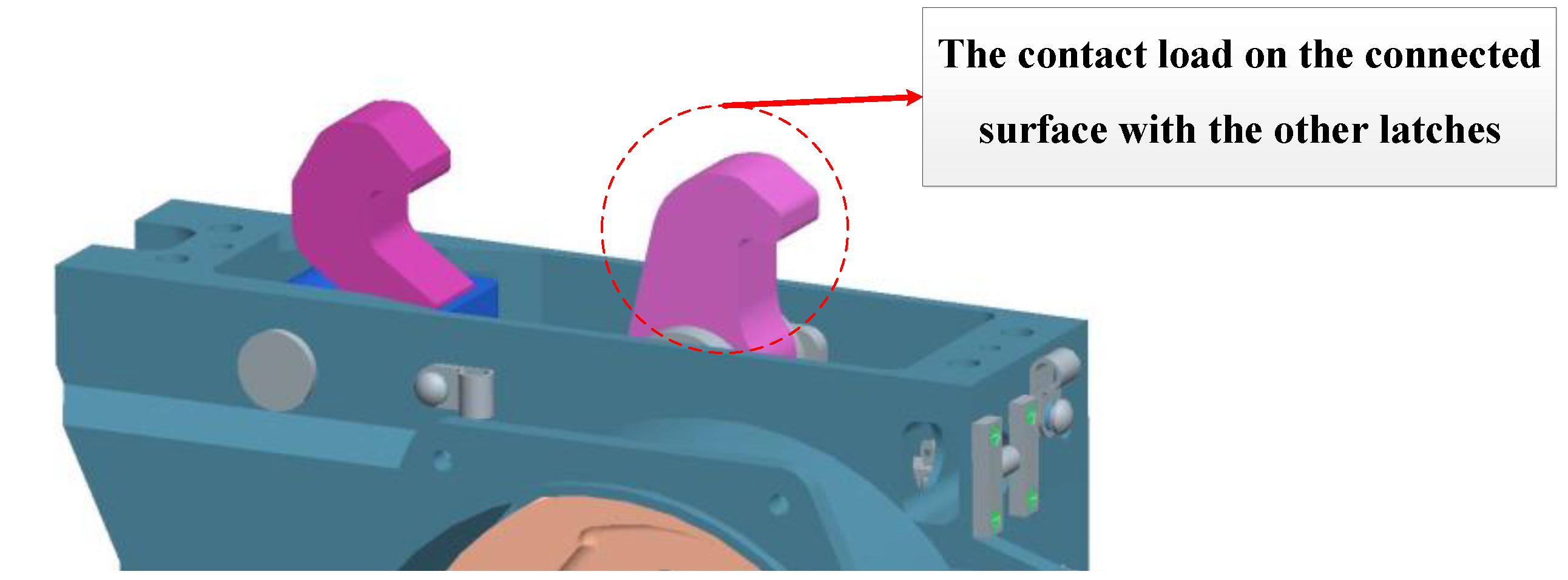
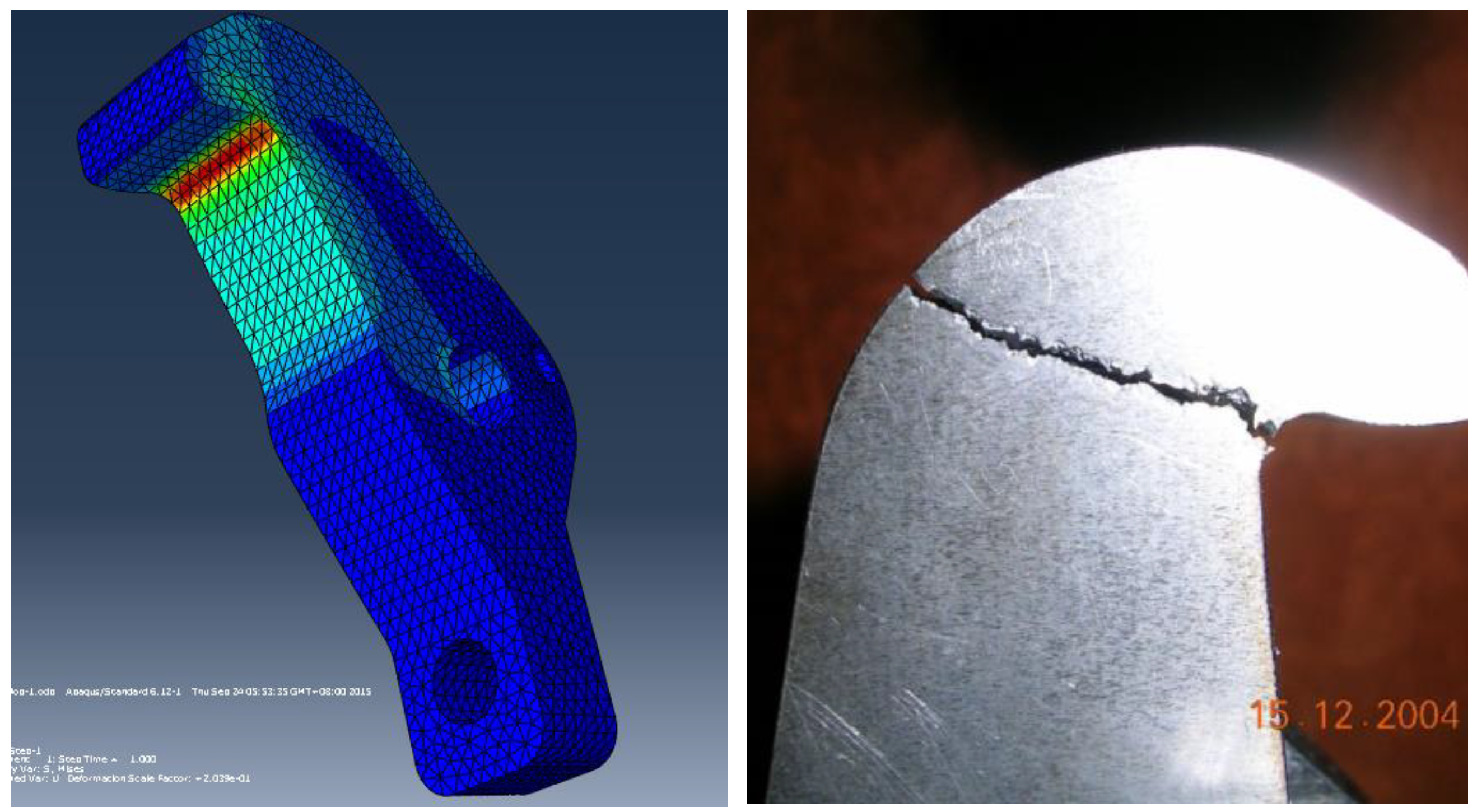
4.2. A Pracitical Application Example—Space Docking Mechanism
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A
References
- Wang, P.; Zhang, J.; Zhai, H.; Qiu, J. A new structural reliability index based on uncertainty theory. Chin. J. Aeronaut. 2017, 30, 1451–1458. [Google Scholar] [CrossRef]
- Ekin, O.; Maria, Q.F. Structural Reliability Estimation with Participatory Sensing and Mobile Cyber-Physical Structural Health Monitoring Systems. Appl. Sci. 2019, 9, 2840. [Google Scholar]
- Dai, W.; Chi, Y.; Lu, Z.; Wang, M.; Zhao, Y. Research on reliability assessment of mechanical equipment based on the performance-feature model. Appl. Sci. 2018, 8, 1619. [Google Scholar] [CrossRef]
- Huang, P.; Huang, H.Z.; Huang, T. A Novel Algorithm for Structural Reliability Analysis Based on Finite Step Length and Armijo Line Search. Appl. Sci. 2019, 9, 2546. [Google Scholar] [CrossRef]
- Cheng, J.; Zhang, Y.; Feng, Y.; Liu, Z.; Tan, J. Structural optimization of a high-speed Press considering multi-source uncertainties based on a new heterogeneous TOPSIS. Appl. Sci. 2018, 8, 126. [Google Scholar] [CrossRef]
- Melchers, R.E. Structural Reliability Analysis and Prediction, 2nd ed.; John Wiley: New York, NY, USA, 1999; pp. 9–62. [Google Scholar]
- Yang, L.; Guo, Y.; Wang, Q. Reliability assessment of a hierarchical system subjected to inconsistent priors and multi-level data. IEEE Trans. Reliab. 2020, 69, 277–292. [Google Scholar] [CrossRef]
- Rackwitz, R. Reliability analysis–A review and some perspectives. Struct. Saf. 2001, 23, 365–395. [Google Scholar] [CrossRef]
- Zhao, Y.G.; Ono, T. A general procedure for first/second-order reliability method (FORM/SORM). Struct. Saf. 1999, 21, 95–112. [Google Scholar] [CrossRef]
- Abdelouafi, E.G.; Benaissa, K.; Abdellatif, K. Reliability analysis of reinforced concrete buildings: Comparison between FORM and ISM. Procedia Eng. 2015, 114, 650–657. [Google Scholar] [CrossRef]
- Huang, X.; Li, Y.; Zhang, Y.; Zhang, X. A new direct second-order reliability analysis method. Appl. Math. Model. 2018, 55, 68–80. [Google Scholar] [CrossRef]
- Yang, L.; Guo, Y. Combining pre- and post-model information in the uncertainty quantification of non-deterministic models using an extended Bayesian melding approach. Inf. Sci. 2019, 502, 146–163. [Google Scholar] [CrossRef]
- Yang, L.; Guo, Y.; Kong, Z. On the performance evaluation of a hierarchical-structure prototype product using inconsistent prior information and limited test data. Inf. Sci. 2019, 485, 362–375. [Google Scholar] [CrossRef]
- Breitung, K. 40 years FORM: Some new aspects? Probablist. Eng. Mech. 2015, 42, 71–77. [Google Scholar] [CrossRef]
- Wang, W.; Xue, H.; Kong, T. An efficient hybrid reliability analysis method for structures involving random and interval variables. Struct. Multidiscip. Optim. 2020, 62, 1–2. [Google Scholar] [CrossRef]
- Low, B.K. FORM, SORM, and spatial modeling in geotechnical engineering. Struct. Saf. 2014, 49, 56–64. [Google Scholar] [CrossRef]
- Lu, Z.H.; Hu, D.Z.; Zhao, Y.G. Second-order fourth-moment method for structural reliability. J. Eng. Mech. 2017, 143. [Google Scholar] [CrossRef]
- Zeng, P.; Li, T.; Jimenez, R.; Feng, X.D.; Chen, Y. Extension of quasi-Newton approximation-based SORM for series system reliability analysis of geotechnical problems. Eng. Comput. 2018, 34, 215–224. [Google Scholar] [CrossRef]
- Mansour, R.; Olsson, M. A closed-form second-order reliability method using noncentral chi-squared distributions. J. Mech. Des. 2014, 136, 1–10. [Google Scholar] [CrossRef]
- Yoo, D.; Lee, I.; Cho, H. Probabilistic sensitivity analysis for novel second-order reliability method (SORM) using generalized chi-squared distribution. Struct. Multidiscip. Optim. 2014, 50, 787–797. [Google Scholar] [CrossRef]
- Kiureghian, A.D.; Ditlevsen, O. Aleatory or epistemic? Does it matter? Struct. Saf. 2009, 31, 105–112. [Google Scholar] [CrossRef]
- Zhang, J.; Qiu, J.; Wang, P. Hybrid Reliability Analysis for Spacecraft Docking Lock with Random and Interval Uncertainty. Int. J. Aerosp. Eng. 2017, 2017, 3920267. [Google Scholar] [CrossRef]
- Hurtado, J.E.; Alvarez, D.A. The encounter of interval and probabilistic approaches to structural reliability at the design point. Comput. Methods Appl. Mech. Eng. 2012, 225, 74–94. [Google Scholar] [CrossRef]
- Zaman, K.; Rangavajhala, S.; Mcdonald, M.P.; Mahadevan, S. A probabilistic approach for representation of interval uncertainty. Reliab. Eng. Syst. Saf. 2011, 96, 117–130. [Google Scholar] [CrossRef]
- Wang, L.; Wang, X.; Xia, Y. Hybrid reliability analysis of structures with multi-source uncertainties. Acta Mech. 2014, 225, 413–430. [Google Scholar] [CrossRef][Green Version]
- Xiao, M.; Zhang, J.; Gao, L.; Lee, S.; Eshghi, A.T. An efficient Kriging-based subset simulation method for hybrid reliability analysis under random and interval variables with small failure probability. Struct. Multidiscip. Optim. 2019, 59, 2077–2092. [Google Scholar] [CrossRef]
- Penmetsa, R.C.; Grandhi, R.V. Efficient estimation of structural reliability for problems with uncertain intervals. Comput. Struct. 2002, 80, 1103–1112. [Google Scholar] [CrossRef]
- Sankararaman, S.; Mahadevan, S. Separating the contributions of variability and parameter uncertainty in probability distributions. Reliab. Eng. Syst. Saf. 2013, 112, 187–199. [Google Scholar] [CrossRef]
- Alvarez, D.A.; Hurtado, J.E. An efficient method for the estimation of structural reliability intervals with random sets, dependence modeling and uncertain inputs. Comput. Struct. 2014, 142, 54–63. [Google Scholar] [CrossRef]
- Hurtado, J.E. Assessment of reliability intervals under input distributions with uncertain parameters. Probabilist. Eng. Mech. 2013, 32, 80–92. [Google Scholar] [CrossRef]
- Hall, J.W.; Lawry, J. Generation, combination and extension of random set approximations to coherent lower and upper probabilities. Reliab. Eng. Syst. Saf. 2004, 85, 89–101. [Google Scholar] [CrossRef]
- Karanki, D.R.; Kushwaha, H.S.; Verma, A.K.; Ajit, S. Uncertainty analysis based on probability bounds (p-box) approach in probabilistic safety assessment. Risk Anal. 2009, 29, 662–675. [Google Scholar] [CrossRef] [PubMed]
- Gao, W.; Wu, D.; Song, C.M.; Tin Loi, F.; Li, X. Hybrid probabilistic interval analysis of bar structures with uncertainty using a mixed perturbation Monte-Carlo method. Finite Elem. Anal. Des. 2011, 47, 643–652. [Google Scholar] [CrossRef]
- Xie, S.J.; Pan, B.S.; Du, X.P. A single-loop optimization method for reliability analysis with second order uncertainty. Eng. Optimiz. 2014, 47, 1125–1139. [Google Scholar] [CrossRef]
- Yoo, D.; Lee, I. Sampling-based approach for design optimization in the presence of interval variables. Struct. Multidiscip. Optim. 2014, 49, 253–266. [Google Scholar] [CrossRef]
- Guo, J.; Du, X.P. Reliability sensitivity analysis with random and interval variables. Int. J. Numer. Meth. Eng. 2010, 78, 1585–1617. [Google Scholar] [CrossRef]
- Luo, Y.J.; Kang, Z.; Li, A. Structural reliability assessment based on probability and convex set mixed model. Comput. Struct. 2009, 87, 1408–1415. [Google Scholar] [CrossRef]
- Du, X.; Sudjianto, A.; Huang, B. Reliability-Based Design with the Mixture of Random and Interval Variables. J. Mech. Des. 2005, 127, 1068–1076. [Google Scholar] [CrossRef]
- Qiu, Z.P.; Wang, J. The interval estimation of reliability for probabilistic and non-probabilistic hybrid structural system. Eng. Fail. Anal. 2010, 17, 1142–1154. [Google Scholar] [CrossRef]
- Chowdhury, R.; Rao, B.N. Hybrid high dimensional model representation for reliability analysis. Comput. Methods Appl. Mech. Eng. 2009, 198, 753–765. [Google Scholar] [CrossRef]
- Jiang, C.; Han, X.; Liu, W.; Liu, J.; Zhang, Z. A Hybrid Reliability Approach Based on Probability and Interval for Uncertain Structures. J. Mech. Des. 2012, 134, 031001. [Google Scholar] [CrossRef]
- Kang, Z.; Luo, Y. Reliability-based structural optimization with probability and convex set hybrid models. Struct. Multidiscip. Optim. 2010, 42, 89–102. [Google Scholar] [CrossRef]
- Xie, S.; Pan, B.; Du, X. An efficient hybrid reliability analysis method with random and interval variables. Eng. Optimiz. 2015, 48, 1–15. [Google Scholar] [CrossRef]
- Alibrandi, U.; Koh, C.G. First-Order Reliability Method for Structural Reliability Analysis in the Presence of Random and Interval Variables. J. Risk Uncertain. Eng. Syst. Part B Mech. Eng. 2015, 4, 1–10. [Google Scholar] [CrossRef]
- Hurtado, J.E. Dimensionality reduction and visualization of structural reliability problems using polar features. Probabilist. Eng. Mech. 2012, 29, 16–31. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Failure Probability Interval | Relative Error | ||
|---|---|---|---|---|
| Lower Boundary | Upper Boundary | Lower Boundary | Upper Boundary | |
| MC(107) | 0.0591 | 0.4421 | ||
| Uncertainty FORM in [22] | 0.0537 | 0.4672 | 9.13% | 5.68% |
| UPSORM | 0.0634 | 0.4192 | 7.28% | 5.18% |
| Random Variables | Distribution Type | Mean | Standard Deviation |
|---|---|---|---|
| elastic modulus E (Pa) | normal | 117 × 109 | 117 × 107 |
| Poisson’s ratio | normal | 0.3 | 0.003 |
| density (kg/m3) | normal | 4.81 × 103 | 0.481 × 103 |
| Method | Failure Probability Interval | Relative Error | ||
|---|---|---|---|---|
| Lower Boundary | Upper Boundary | Lower Boundary | Upper Boundary | |
| MC () | / | / | ||
| Uncertainty FORM in [22] | 11.4% | 8.12% | ||
| UPSORM | 7.88% | 7.55% | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, P.; Yang, L.; Zhao, N.; Li, L.; Wang, D. A New SORM Method for Structural Reliability with Hybrid Uncertain Variables. Appl. Sci. 2021, 11, 346. https://doi.org/10.3390/app11010346
Wang P, Yang L, Zhao N, Li L, Wang D. A New SORM Method for Structural Reliability with Hybrid Uncertain Variables. Applied Sciences. 2021; 11(1):346. https://doi.org/10.3390/app11010346
Chicago/Turabian StyleWang, Pidong, Lechang Yang, Ning Zhao, Lefei Li, and Dan Wang. 2021. "A New SORM Method for Structural Reliability with Hybrid Uncertain Variables" Applied Sciences 11, no. 1: 346. https://doi.org/10.3390/app11010346
APA StyleWang, P., Yang, L., Zhao, N., Li, L., & Wang, D. (2021). A New SORM Method for Structural Reliability with Hybrid Uncertain Variables. Applied Sciences, 11(1), 346. https://doi.org/10.3390/app11010346