An Investigation of Early Detection of Driver Drowsiness Using Ensemble Machine Learning Based on Hybrid Sensing †


Abstract
1. Introduction
2. Materials and Methods
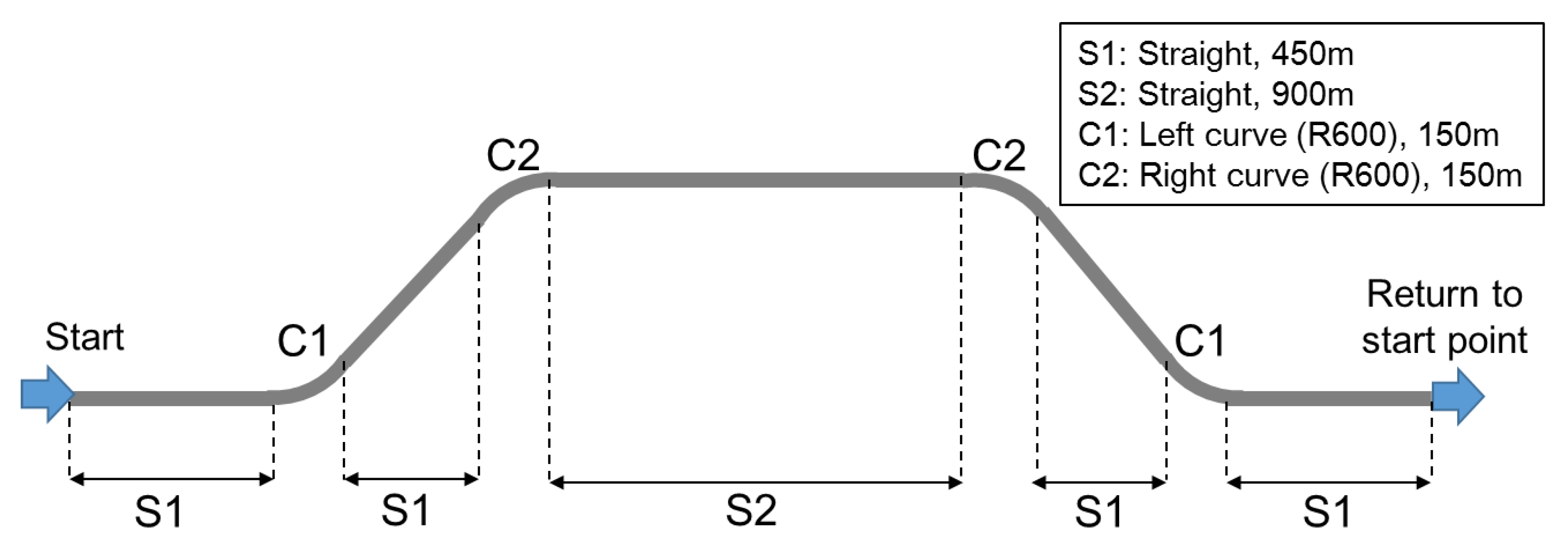
2.1. Participants and Driving Task
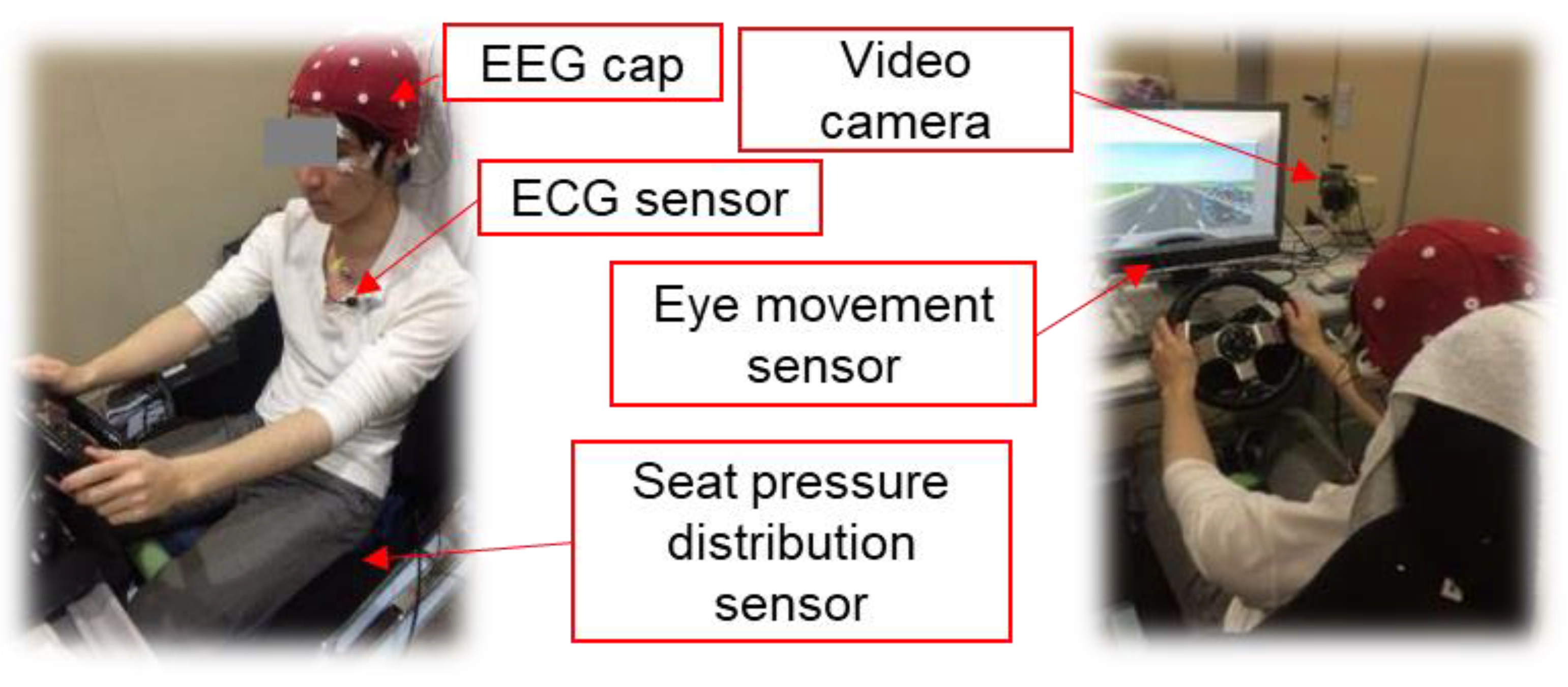
2.2. Measurements and Data Processing
2.2.1. Facial Expression
2.2.2. Driving Performance
2.2.3. Behavioral Features
2.2.4. Physiological Signals
EEG
ECG
2.3. Experimental Protocol
2.4. Data Analysis
2.4.1. Data Processing
2.4.2. Classification of the Drowsy State Using Machine Learning Algorithms
3. Results
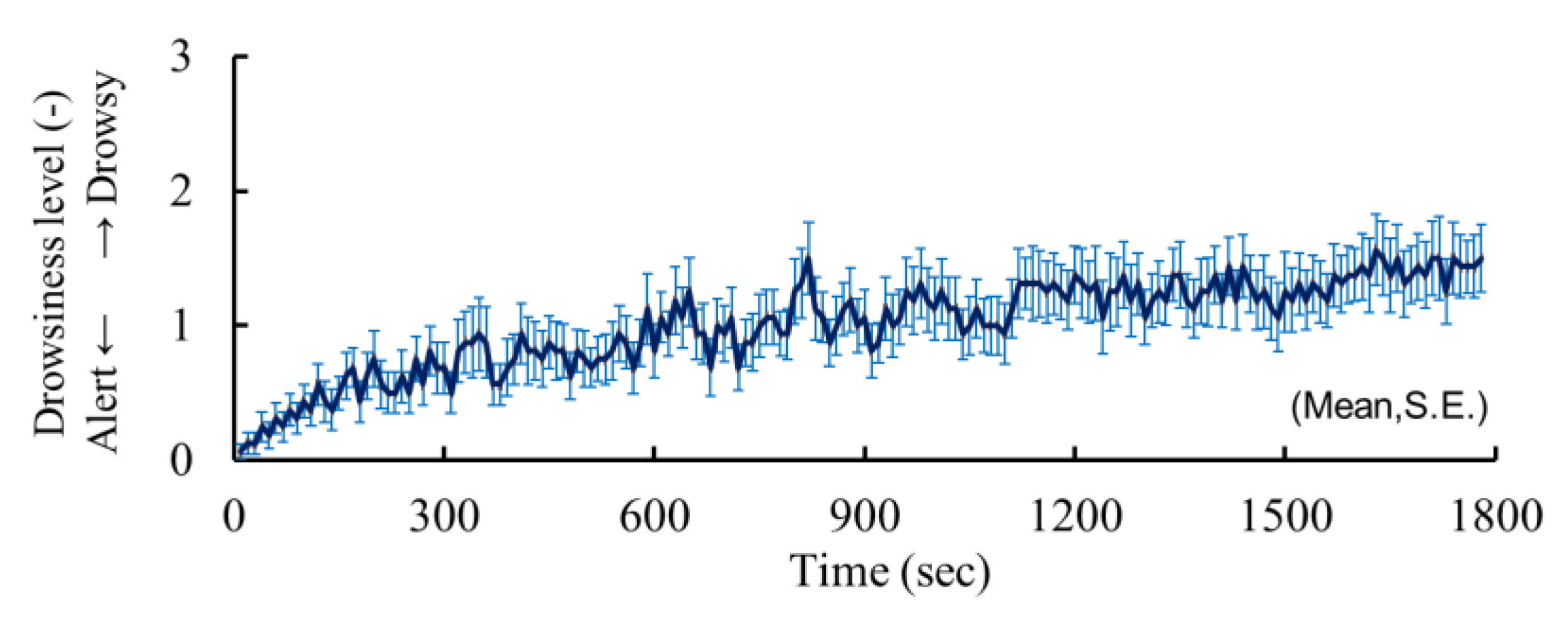
3.1. Changes in Drowsiness Level and the Constitution of the Dataset
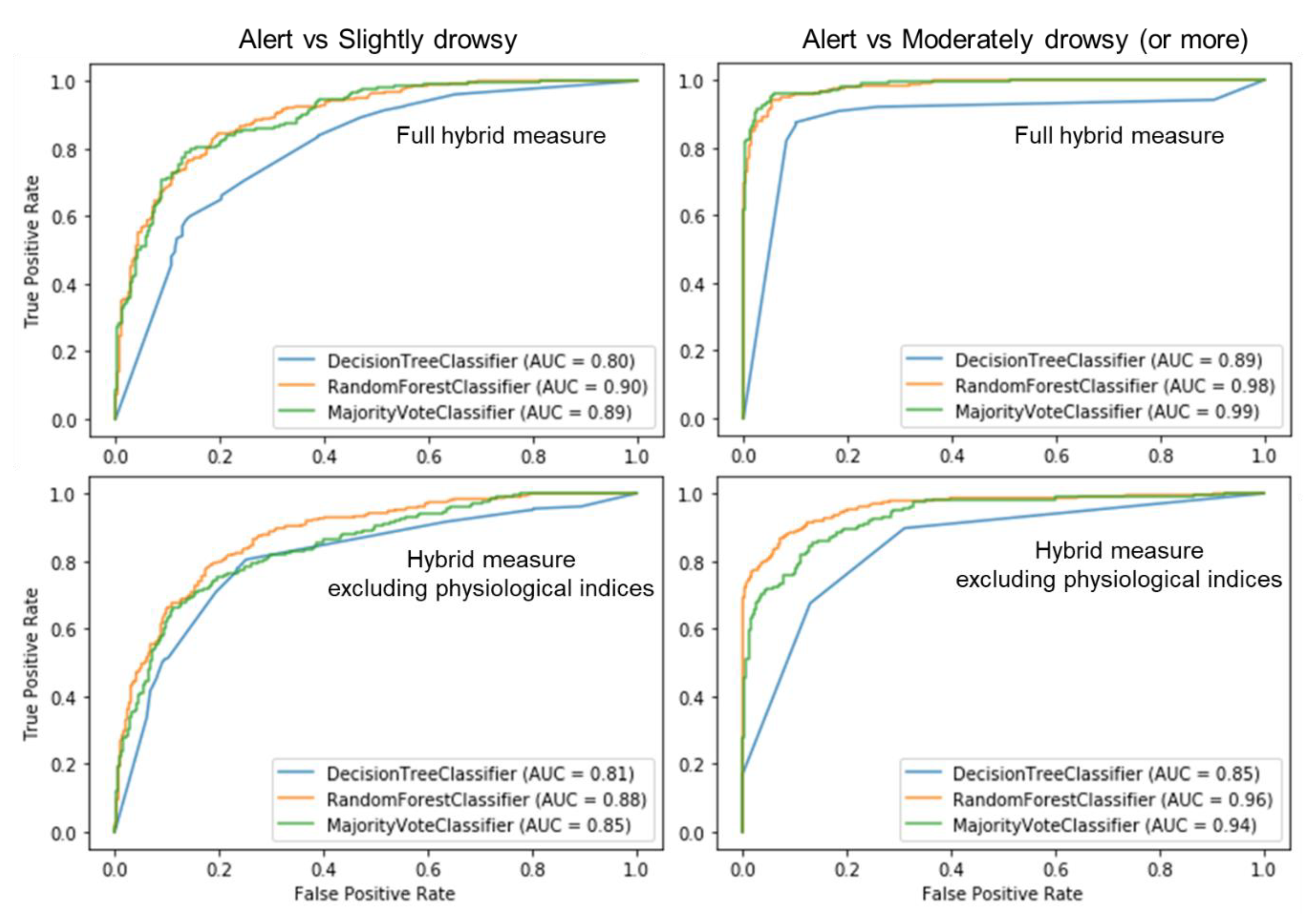
3.2. Performance of Drowsy State Classification Using Ensemble Machine Learning Algorithms
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Metropolitan Police Department of Japan. The occurrence Situation of Traffic Accidents during the Year of 2017. 2018, pp. 19–20. (In Japanese). Available online: https://www.npa.go.jp/publications/statistics/koutsuu/H29zennjiko.pdf (accessed on 1 March 2020).
- Kitajima, H.; Numata, N.; Yamamoto, K.; Goi, Y. Prediction of automobile driver sleepiness. Trans. Jpn. Soc. Mech. Eng. C 1997, 63, 99–100. [Google Scholar]
- Zilberg, E.; Xu, Z.M.; Burton, D.; Karrar, M.; Lal, S. Methodology and initial analysis results for development of non-invasive and hybrid driver drowsiness detection systems. In Proceedings of the IEEE International Conference on Wireless Broadband and Ultra-Wideband Communications, Sydney, NSW, Australia, 27–30 August 2007; p. 16. [Google Scholar]
- Subasi, A. Automatic recognition of alertness from EEG by using neural networks and wavelet coefficients. Expert Syst. Appl. 2005, 28, 701–711. [Google Scholar] [CrossRef]
- Ji, Q.; Zhu, Z.; Lan, P. Real-time nonintrusive monitoring and prediction of driver fatigue. IEEE Trans. Veh. Technol. 2004, 53, 1052–1068. [Google Scholar] [CrossRef]
- Popieul, J.C.; Simon, P.; Loslever, P. Using driver’s head movements evolution as a drowsiness indicator. In Proceedings of the IEEE Proceeding on Intelligent Vehicle Symposium, Columbus, OH, USA, 9–11 June 2003; pp. 616–621. [Google Scholar]
- Pritchett, S.; Zilberg, E.; Xu, Z.M.; Karrar, M.; Burton, D.; Lal, S. Comparing accuracy of two algorithms for detecting driver drowsiness–Single source (EEG) and hybrid (EEG and body movement). In Proceedings of the 6th International Conference on Broadband and Biomedical Communications (IB2Com), Melbourne, VIC, Australia, 21–24 November 2011; pp. 179–184. [Google Scholar]
- Papadelis, C.; Chen, Z.; Kourtidou-Papadeli, C.; Bamidis, P.D.; Chouvarda, I.; Bekiari, E. Monitoring sleepiness with on-board electrophysiological recordings for preventing sleep deprived traffic accidents. Clin. Neurophysiol. 2007, 9, 1906–1922. [Google Scholar] [CrossRef]
- Fu, C.L.; Li, W.K.; Chun, H.C.; Tung, P.S.; Chin, T.L. Generalized EEG-based drowsiness prediction system by using a self-organizing neural fuzzy system. IEEE Transection Circuits Syst. 2012, 59, 2044–2055. [Google Scholar]
- Chin, T.L.; Che, J.C.; Bor, S.L.; Shao, H.H.; Chih, F.C.; Wang, I.J. A real–time wireless brain-computer interface system for drowsiness detection. IEEE Transection Biomed. Circuits Syst. 2010, 4, 214–222. [Google Scholar]
- Patel, M.; Lal, S.K.L.; Kavanagh, D.; Rossiter, P. Applying neural network analysis on heart rate variability data to assess driver fatigue. Expert Syst. Appl. 2011, 38, 7235–7242. [Google Scholar] [CrossRef]
- Awais, M.; Badruddin, N.; Drieberg, M. A Hybrid approach to detect driver drowsiness utilizing physiological signals to improve system performance and wearability. Sensors 2017, 17, 1991. [Google Scholar] [CrossRef]
- Otmani, S.; Pebayle, T.; Roge, J.; Muzet, A. Effect of driving duration and partial sleep deprivation on subsequent alertness and performance of car drivers. Physiol. Behav. 2005, 84, 715–724. [Google Scholar] [CrossRef]
- Ingre, M.; Akerstedt, T.; Peters, B.; Anund, A.; Kecklund, G. Subjective sleepiness, simulated driving performance and blink duration: Examining individual differences. J. Sleep Res. 2006, 15, 47–53. [Google Scholar] [CrossRef]
- Zhang, H.; Wua, C.; Yan, X.; Qiu, T.Z. The effect of fatigue driving on car following behavior. Transp. Res. Part F 2016, 43, 80–89. [Google Scholar] [CrossRef]
- Flores, M.; Armingol, J.; de la Escalera, A. Driver drowsiness warning system using visual information for both diurnal and nocturnal illumination conditions. EURASIP J. Adv. Signal Process. 2010, 2010, 438205. [Google Scholar] [CrossRef]
- Khushaba, R.N.; Kodagoda, S.; Lal, S.; Dissanayake, G. Driver drowsiness classification using fuzzy wavelet-packet-based feature-extraction algorithm. IEEE Transactions Biomed. Eng. 2010, 58, 121–131. [Google Scholar] [CrossRef] [PubMed]
- Correa, A.G.; Orosco, L.; Laciar, E. Automatic detection of drowsiness in EEG records based on multimodal analysis. Med Eng. Phys. 2014, 36, 244–249. [Google Scholar] [CrossRef] [PubMed]
- Cheng, B.; Zhang, W.; Lin, Y.; Feng, R.; Zhang, X. Driver drowsiness detection based on multisource information. Hum. Factors Ergon. Manuf. Serv. Ind. 2012, 22, 450–467. [Google Scholar] [CrossRef]
- Gwak, J.S.; Shino, M.; Hirao, A. Early detection of driver drowsiness utilizing machine learning based on physiological signals, behavioral measures, and driving performance. In Proceedings of the IEEE International Conference on Intelligent Transportation Systems, Maui, Hawaii, HI, USA, 4–7 November 2018; pp. 1794–1800. [Google Scholar]
- Hsieh, F.Y.; Bloch, D.A.; Larsen, M.D. A simple method of sample size calculation for linear and logistic regression. Stat. Med. 1998, 17, 1623–1634. [Google Scholar] [CrossRef]
- Garrett, D.; Peterson, D.A.; Anderson, C.W.; Thaut, M.H. Comparison of linear, nonlinear, and feature selection methods for EEG signal classification. IEEE Trans. Neural Syst. Rehabil. Eng. 2003, 11, 141–144. [Google Scholar] [CrossRef]
- Soucy, P.; Mineau, G.W. A simple KNN algorithm for text categorization. In Proceedings of the IEEE International Conference on Data Mining, San Jose, CA, USA, 29 November–2 December 2001; pp. 647–648. [Google Scholar]
- Brijain, R.P.; Kushik, K.R. A survey on decision tree algorithm for classification. Int. J. Eng. Dev. Res. 2014, 2, 1–5. [Google Scholar]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Cloete, S.R.; Wallis, G. Visuomotor control of steering: The artefact of the matter. Exp. Brain Res. 2011, 208, 475–489. [Google Scholar] [CrossRef] [PubMed]
- Loon, R.J.; Brouwer, R.F.T.; Martens, M.H. Drowsy drivers’ under-performance in lateral control: How much is too much? Using an integrated measure of lateral control to quantify safe lateral driving. Accid. Anal. Prev. 2015, 84, 134–143. [Google Scholar] [CrossRef] [PubMed]
- Godthelp, H.; Milgram, P.; Blaauw, G.J. The development of a time related measure to describe driving strategy. Hum. Factors 1984, 26, 257–268. [Google Scholar] [CrossRef]
- Michel, C.M.; Lehmann, D.; Henggeler, B.; Brandeis, D. Localization of the sources of EEG delta, theta, alpha and beta frequency bands using the FFT dipole approximation. Electroencephalogr Clin. Neurophysiol. 1992, 82, 38–44. [Google Scholar] [CrossRef]
- International Organization for Standardization. ISO7730: Ergonomics of the Thermal Environment–Analytical Determination and Interpretation of Thermal Comfort Using Calculation of the PMV and PPD Indices and Local Thermal Comfort Criteria; International Organization for Standardization: Geneva, Switzerland, 2005. [Google Scholar]
- Ogutu, J.O.; Schulz-Streeck, T.; Piepho, H. Genomic selection using regularized linear regression models: Ridge regression, lasso, elastic net and their extensions. BMC Proc. 2012, 6, S10. [Google Scholar] [CrossRef]
- Hamdia, K.M.; Ghasemi, H.; Bazi, Y.; AlHichri, H.; Alajlan, N.; Rabczuk, T. A novel deep learning based method for the computational material design of flexoelectric nanostructures with topology optimization. Finite Elem. Anal. Des. 2019, 165, 21–30. [Google Scholar] [CrossRef]
- Li, G.; Chung, W.Y. A Context-Aware EEG Headset System for Early Detection of Driver Drowsiness. Sensors 2015, 15, 20873–20893. [Google Scholar] [CrossRef]
- Rhodes, N.; Pivik, K. Age and gender differences in risky driving: The roles of positive affect and risk perception. J. Accid. Anal. Prev. 2011, 43, 923–931. [Google Scholar] [CrossRef]
- Yan, X.; Radwan, E.; Guo, D. Effects of major-road vehicle speed and driver age and gender on left-turn gap acceptance. J. Accid. Anal. Prev. 2007, 39, 843–852. [Google Scholar] [CrossRef]
- Hamdia, K.M.; Arafa, M.; Alqedra, M. Structural damage assessment criteria for reinforced concrete buildings by using a Fuzzy Analytic Hierarchy process. Undergr. Space 2018, 3, 243–249. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| State (Value) | Indicators in Images |
|---|---|
| Alert (0) | Fast eye blinks, often reasonably regular; apparent focus on driving with occasional fast sideways glances; normal facial tone. |
| Slightly Drowsy (1) | Increase in duration of eye blinks and possible increase in the rate of eye blinks; increase in duration and frequency of sideways glances; appearance of “glazed-eye” look, occasional yawning. |
| Moderately Drowsy (2) | Occasional disruption of eye focus; significant increase in eye blink duration; disappearance of eye blink patterns observed during the alert state; reduction in the degree of eye opening; occasional disappearance of facial tone. |
| Significantly Drowsy (3) | Discernible episodes of almost complete eye closure; eyes are never fully open; significant disruption of eye focus. |
| Extremely Drowsy (4) | Significant increase in frequency of eye closure episodes; longer duration of episodes. |
| Measurement | Details | Extracted Feature |
|---|---|---|
| Physiological Measures | Electroencephalogram (EEG) | Delta, theta, alpha, and beta wave content of 16 channels (Fp1, Fp2, F3, F4, C3, C4, P3, P4, O1, O2, F7, F8, T3, T4, T5, and T6) |
| Electrocardiogram (ECG) | Mean of R-R interval (RRI) Coefficient of variation R-R interval (CVRR) Low frequency per high frequency (LF/HF) High frequency (HF) content | |
| Behavioral Measures | Visual Behavior | The number of eye blinks Percentage of eye closure (PERCLOS) |
| Seat Pressure | Distance of centroid movement X coordinate of the centroid Y coordinate of the centroid | |
| Vehicle based Measures | DS Parameter | Vehicle velocity Longitudinal acceleration Offset from lane center (Lateral position) Steering wheel acceleration (SWA) Standard deviation of lateral position (SDLP) Time headway (THW) Time to lane crossing (TLC) |
| Classifiers | Cases (Alert State vs.) | Performance of Classification | |||
|---|---|---|---|---|---|
| Acc. (%) | Pre. (%) | Rec. (%) | F1 (%) | ||
| DT | Slightly Drowsy | 73.5 | 77.3 | 67.6 | 71.9 |
| Moderately Drowsy (or more) | 90.4 | 90.4 | 88.3 | 89.3 | |
| MVC | Slightly Drowsy | 82.0 | 84.5 | 78.6 | 81.4 |
| Moderately Drowsy (or more) | 95.4 | 97.1 | 92.9 | 94.9 | |
| RF | Slightly Drowsy | 82.4 | 81.6 | 84.1 | 82.8 |
| Moderately Drowsy (or more) | 93.7 | 93.0 | 93.5 | 93.2 | |
| Classifiers | Cases (Alert State vs.) | Performance of Classification | |||
|---|---|---|---|---|---|
| Acc. (%) | Pre. (%) | Rec. (%) | F1 | ||
| DT | Slightly Drowsy | 72.2 | 75.6 | 67.8 | 71.4 |
| Moderately Drowsy (or more) | 83.6 | 82.9 | 81.7 | 82.2 | |
| MVC | Slightly Drowsy | 75.3 | 77.7 | 72.5 | 75.0 |
| Moderately Drowsy (or more) | 85.1 | 85.3 | 82.2 | 83.7 | |
| RF | Slightly Drowsy | 78.7 | 79.9 | 78.0 | 78.9 |
| Moderately Drowsy (or more) | 89.8 | 88.7 | 89.5 | 89.1 | |
| Priority Order | Selected Feature in Case of Using Full Hybrid Measures | Selected Feature in Case of Excluding Physiological Indices |
|---|---|---|
| 1 | PERCLOS | PERCLOS |
| 2 | RRI | Y coordinate of the centroid |
| 3 | THW | X coordinate of the centroid |
| 4 | X coordinate of the centroid | THW |
| 5 | Y coordinate of the centroid | Distance of centroid movement |
| 6 | The number of eye blinks | The number of eye blinks |
| 7 | Beta wave content of F3 | Offset from lane center |
| 8 | Beta wave content of Fp2 | Vehicle velocity |
| 9 | HF content | SDLP |
| 10 | Beta wave content of Fp1 | SWA |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gwak, J.; Hirao, A.; Shino, M. An Investigation of Early Detection of Driver Drowsiness Using Ensemble Machine Learning Based on Hybrid Sensing. Appl. Sci. 2020, 10, 2890. https://doi.org/10.3390/app10082890
Gwak J, Hirao A, Shino M. An Investigation of Early Detection of Driver Drowsiness Using Ensemble Machine Learning Based on Hybrid Sensing. Applied Sciences. 2020; 10(8):2890. https://doi.org/10.3390/app10082890
Chicago/Turabian StyleGwak, Jongseong, Akinari Hirao, and Motoki Shino. 2020. "An Investigation of Early Detection of Driver Drowsiness Using Ensemble Machine Learning Based on Hybrid Sensing" Applied Sciences 10, no. 8: 2890. https://doi.org/10.3390/app10082890
APA StyleGwak, J., Hirao, A., & Shino, M. (2020). An Investigation of Early Detection of Driver Drowsiness Using Ensemble Machine Learning Based on Hybrid Sensing. Applied Sciences, 10(8), 2890. https://doi.org/10.3390/app10082890