1. Introduction
Derailment of a rapidly moving train may lead to fatal consequences, thus such accidents should be prevented through effective means, such as derailment-prevention devices and structures. In Europe and in Japan, Korea, and several other countries, effective derailment-prevention methodologies have been studied and developed, such as derailment-containment walls [
1,
2,
3,
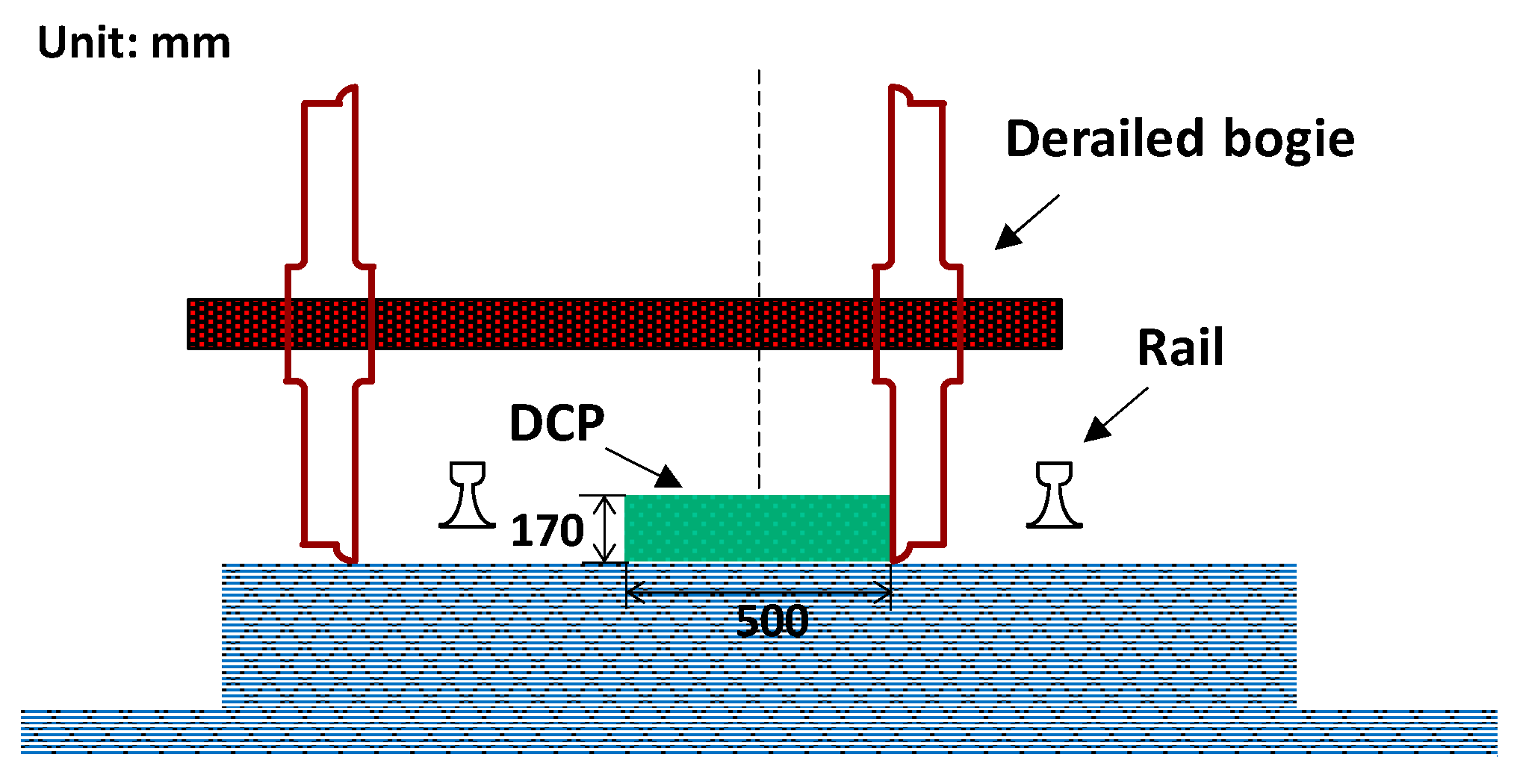
4]. In addition to the fundamental prevention concepts, these studies have suggested design methods and provisions for the walls. Recently, a new type of structural system for derailment-containment prevention (DCP), which is constructed between the rails, has been developed in Korea [
4], as shown in
Figure 1. The concrete structural member is located between rails to restrict the horizontal movement of derailed train. To design the structural member and to validate its performance as a DCP system, the structural responses of the member under contact, and the impact forces induced by a derailed train, should be investigated by rational procedures.
Through simulations and experiments, the performance of the newly proposed system has been verified, and an appropriate design procedure for this system has been suggested [
1,
4]. However, the prevention performance has been investigated only for concrete track ballast, even though in several cases, the track ballast can be constructed as a gravel track bed. This indicates that, apart from concrete ballast, the DCP systems should be additionally examined for train derailment over a gravel ballast.
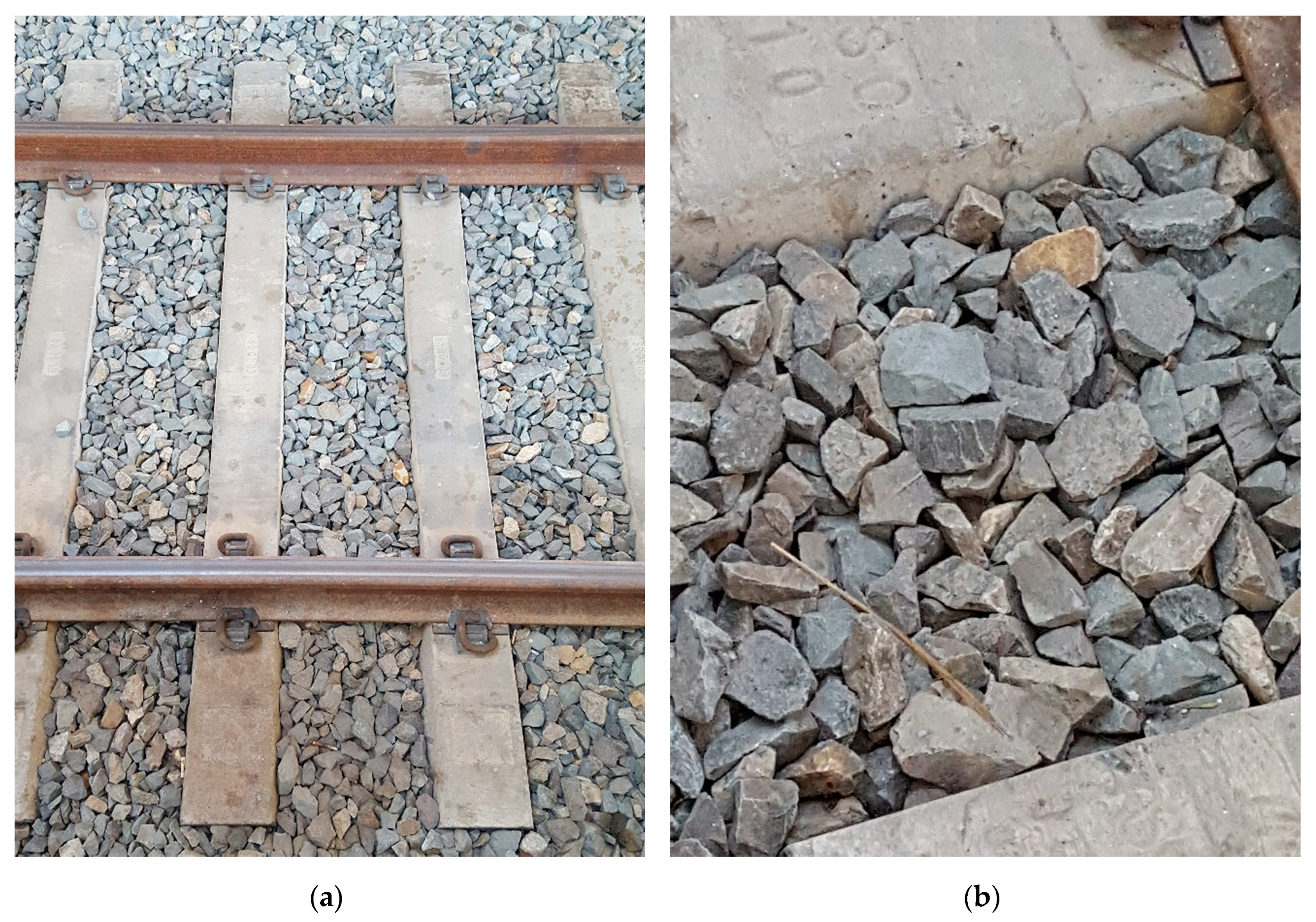
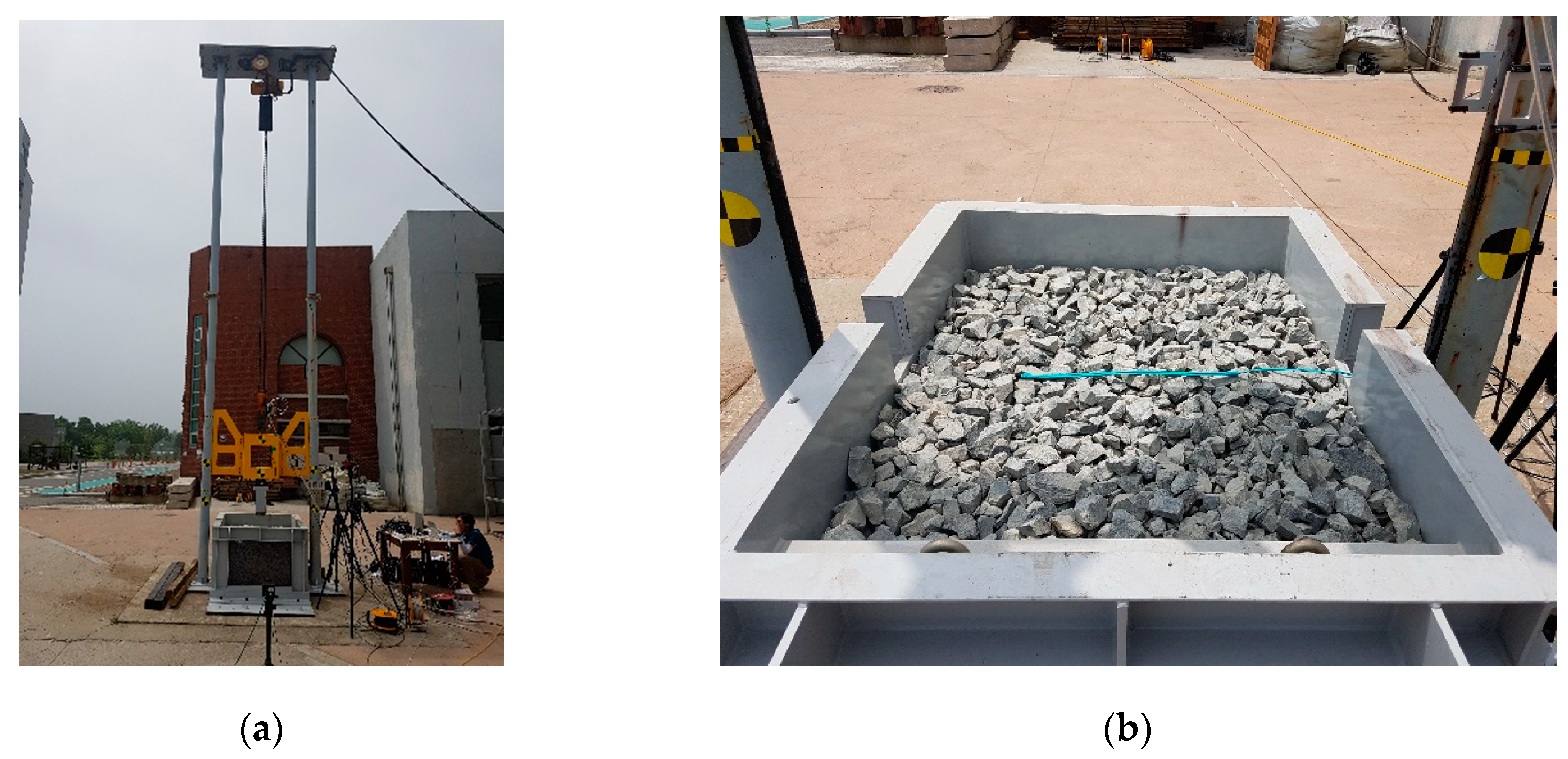
As mentioned before, in several cases, the track ballast comprises pieces of gravel of irregular shapes, which form the track bed, as shown in
Figure 2. When a train is derailed, the wheel of the derailed train will contact the ballast, and the interaction between the gravel pieces and the contacted wheel will affect the subsequent behavior of the derailed train. Therefore, for designing, verifying, and optimizing rational DCP systems with gravel ballast systems, this interaction should be analyzed to investigate the behavior of the derailed train after it contacts the ballast.
For the modeling and simulation of the track ballast, the finite-element method (FEM) has been widely used because of its reliability and convenience. By using the conventional FEM approach, the ballast is modeled as shell or solid elements, with material properties equivalent to those of gravel layers in the two-or three-dimensional domain, respectively. Even when appropriate material models are applied, there is a limitation regarding the interaction between the gravel pieces in contact. The gravel pieces can be in contact or separate from each other. However, if the gravel layer is modeled using the conventional FEM, the interaction characteristics cannot be effectively considered because this approach does not allow the separation of elements that share nodes and exhibit a very large deformation. To rationally design the DCP, the post-behavior of the derailed train should be analyzed first to evaluate the required physical quantities, including the impact load on the DCP structural members due to the derailed train. When the train is derailed over gravel ballast, it can be assumed that the interaction between the ballast and train, which is induced by the contact between the gravel and the wheel of the bogie, directly affects the subsequent behavior of the derailed train. Therefore, rational numerical modeling and simulation methods for the ballast should be studied to perform the post-behavioral analysis of a train derailed over gravel ballast.
As mentioned earlier, the track ballast has been modeled based on FEM approaches. Paderno [
5] studied the long-term settlement characteristics and the effect of the tamping process on the dynamic behavior of the ballast, using FEM approaches. In that study, the ballast was modeled as shell elements, and the equivalent material properties, such as internal friction angle, dilation angle, and cohesion, which had been evaluated through a simple experiment, were applied using the Mohr–Coulomb plastic model. Although this approach could be applied in ballast modeling for relatively small-deformation problems, it still has limitations with respect to directly considering the interactions between the pieces of gravel in contact, especially the interlocking effect between these pieces. Zhou et al. [
6] studied methodologies for analyzing the ultimate lateral pressure of penetrated pile in undrained clay based on FEM. Although the approach can be applied for relatively large deformable soil layers, separation of the gravels cannot be simulated by the approach.
Ahmadi and Eskandari [
7,
8] suggested the vibration analysis method of a rigid circular disk embedded in a transversely isotropic solid. Eskandrai et al. [
9] studied the closed-form solution for lateral translation of an inextensible circular membrane embedded in a transversely isotropic half-space. However, there are still limitations for considering the time-varying change of the geotechnical properties of the ballast due to the applied forces.
To overcome these limitations, other approaches have been studied based on the discrete-element method (DEM). Using DEM, each piece of gravel can be modeled as an individual object with efficient calculation; therefore, the interaction between the gravel elements in the ballast, including slip, separation, and re-attachment, can be analyzed. Zhou et al. [
10] performed a DEM-based analytical study to simulate the effect of the tamping process on the compactness of track ballast. Mahmoud et al. [
11] studied a simulation method for the permanent settlement of track ballast due to cyclic loading, based on the DEM approach. Kim et al. [
12] investigated the influencing factors in ballast settlement using a DEM simulation. Furthermore, Pi et al. [
13] studied the relation between the geogrid rib size and the particle size distribution of ballast materials using a DEM simulation.
When DEM approaches are used, the modeling method used for the gravel, including the shape and initial positions of the gravel pieces, is important. Thakur et al. [
14] studied a modeling method for arbitrarily shaped gravel pieces using a clump of circles in 2D for DEM simulation. Mollon and Zaho [
15] studied the generation and particle-packing method of sand in a DEM simulation. They suggested a method to determine the number and initial positions of the particles to satisfy the pre-defined size distribution, shape, and density of the sand layer. Campello and Cassares [
16] also studied a method to rapidly generate a particle layer using the DEM approach. In recent studies, the individual particles have been modeled as sphere-type rigid bodies or clumps consisting of spheres, to ensure efficient calculation. Nezami et al. [
17] adopted a DEM simulation approach using specifically shaped objects with fast tracking for contact between the objects, using their in-house simulation code, DBLOCK3D. As alternatives to the conventional FEM, DEM approaches are being used to model and simulate ballast. If a rational modeling and simulation method for track ballast is used, the simulation method for analyzing the behavior of the derailed train can be investigated considering the interaction between the ballast and the derailed bogie. For the simulation, DEM approaches can be effectively used.
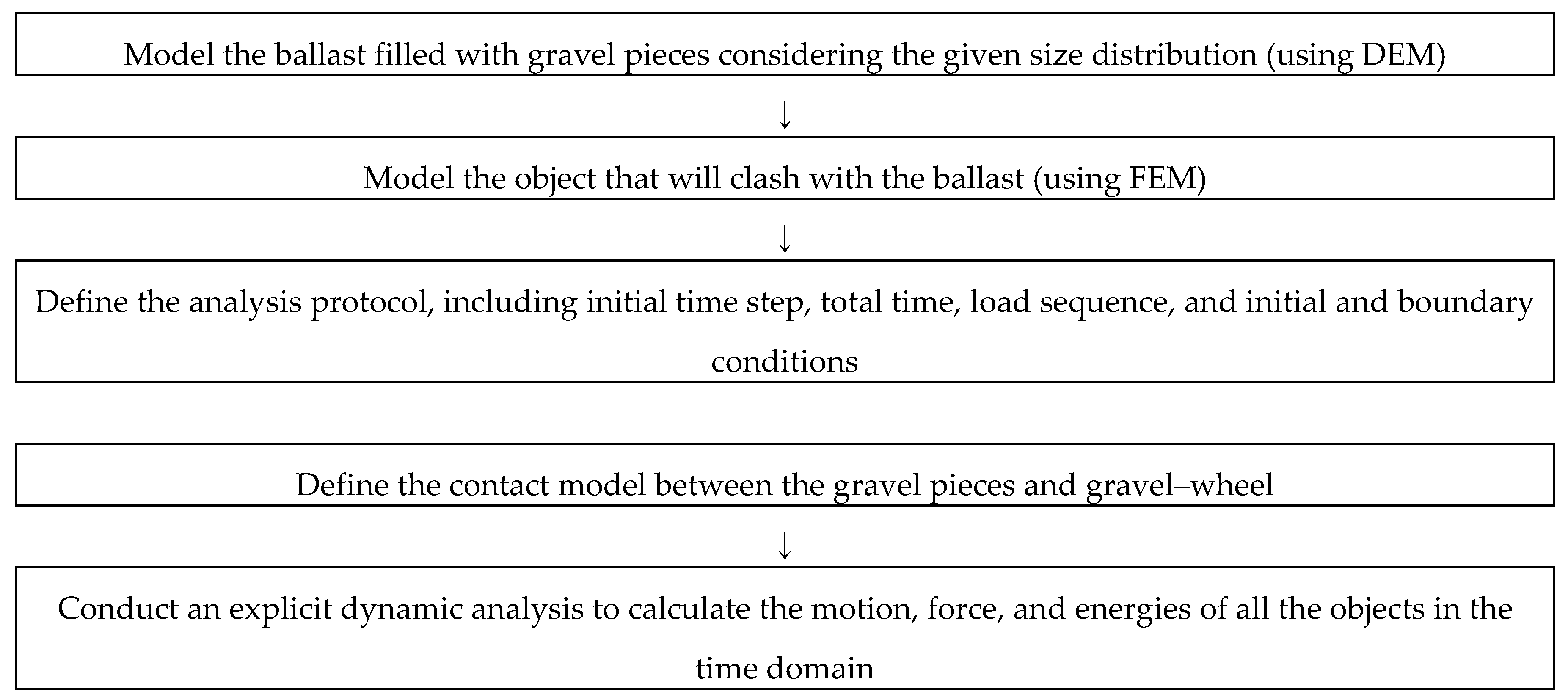
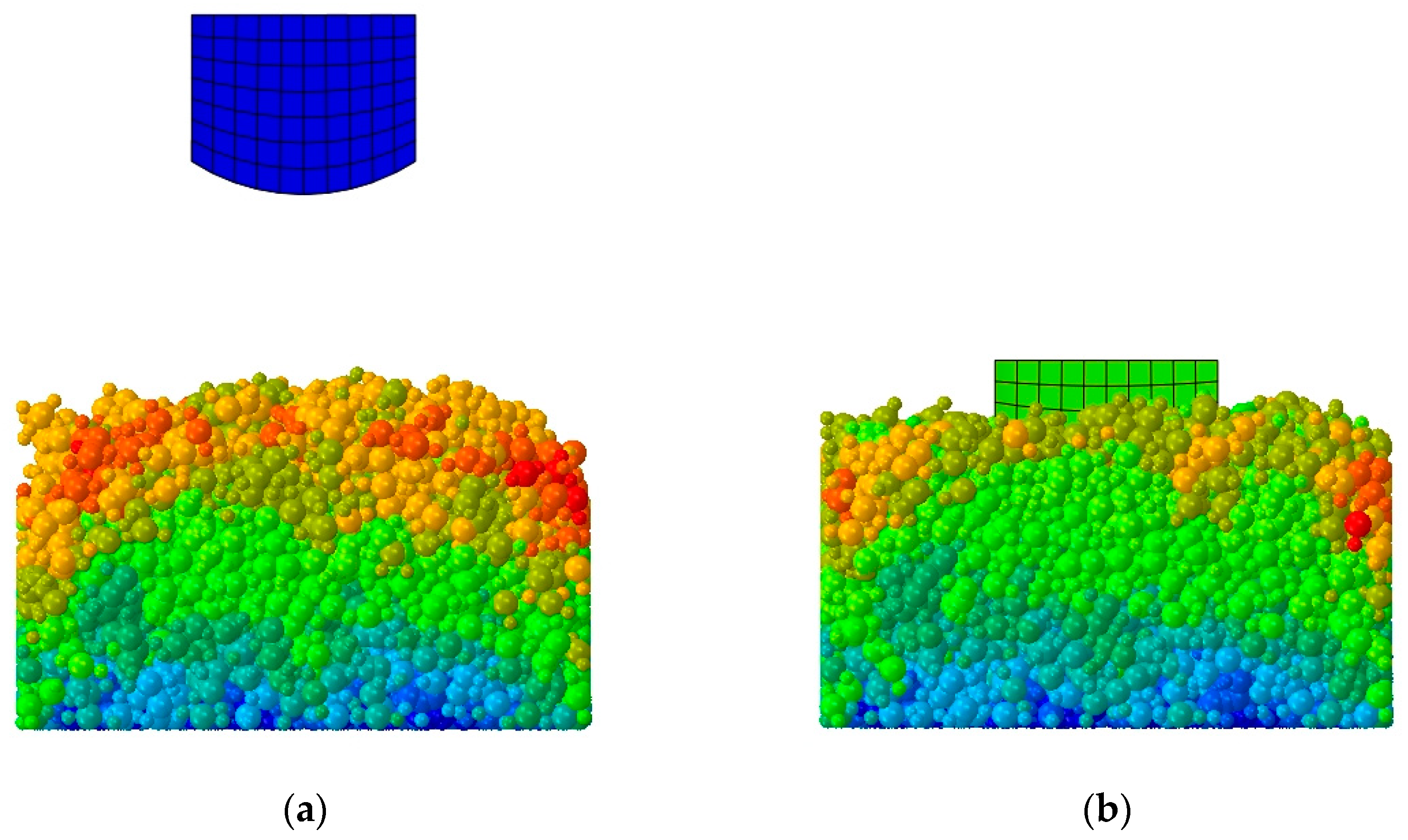
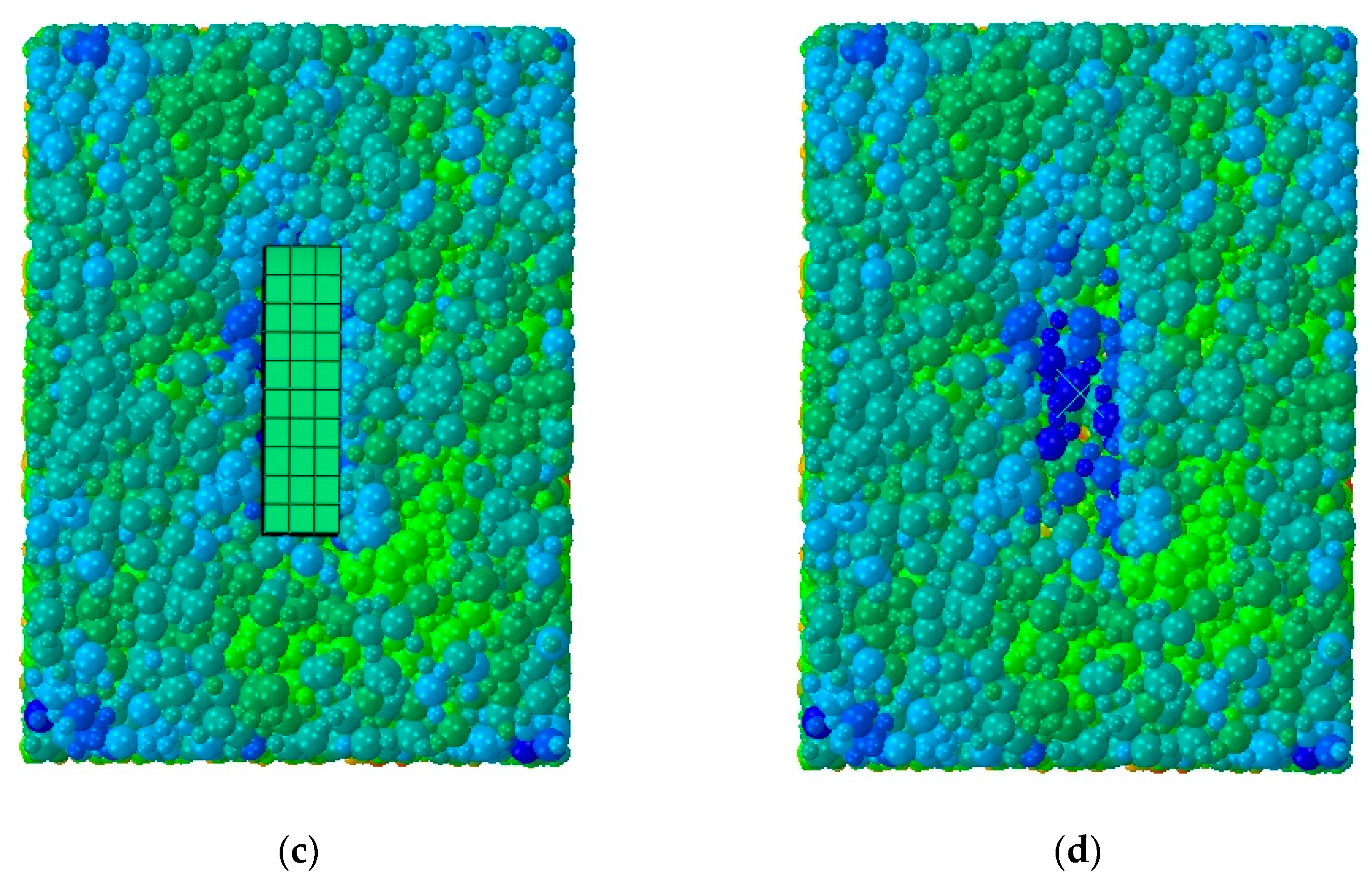
This study aims to propose a method for modeling track ballast filled with gravel pieces and simulating a ballast–wheel collision. Because the pieces of gravel can be separated and re-attached, conventional FE methods, which do not allow the separation of the elements, exhibit limitations regarding the modeling of gravel-filled ballast. To overcome this limitation, DEM-based modeling and simulation methods were investigated in this study. Using a DEM approach, the individual pieces of gravel can be modeled; hence, the interactions between the pieces of gravel in contact and between the gravel and other objects can be simulated. For a rational simulation of the ballast–wheel interaction, appropriate modeling and simulation strategies should be adopted considering the characteristics of the gravel used for the track ballast. To consider the interlocking of the gravel elements in contact, a clump-type rigid object is mainly used for each piece of gravel. Whereas the gravel pieces are modeled based on DEM, the other objects that contact and clash with the gravel layer are modeled based on FEM to calculate and consider the energy absorption of the deformable bodies. Thus, a DEM–FEM combined simulation method is adopted in this research.
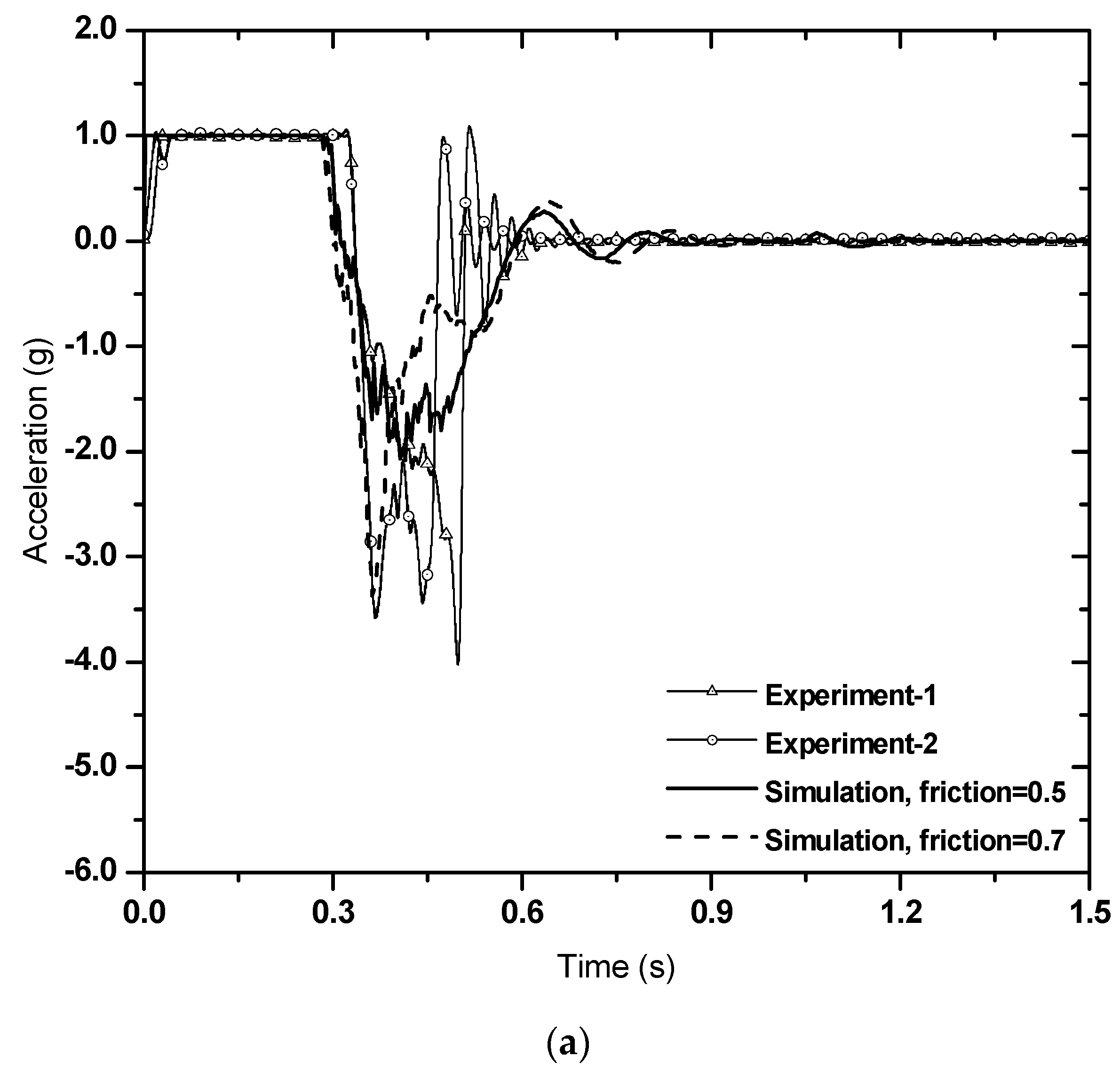
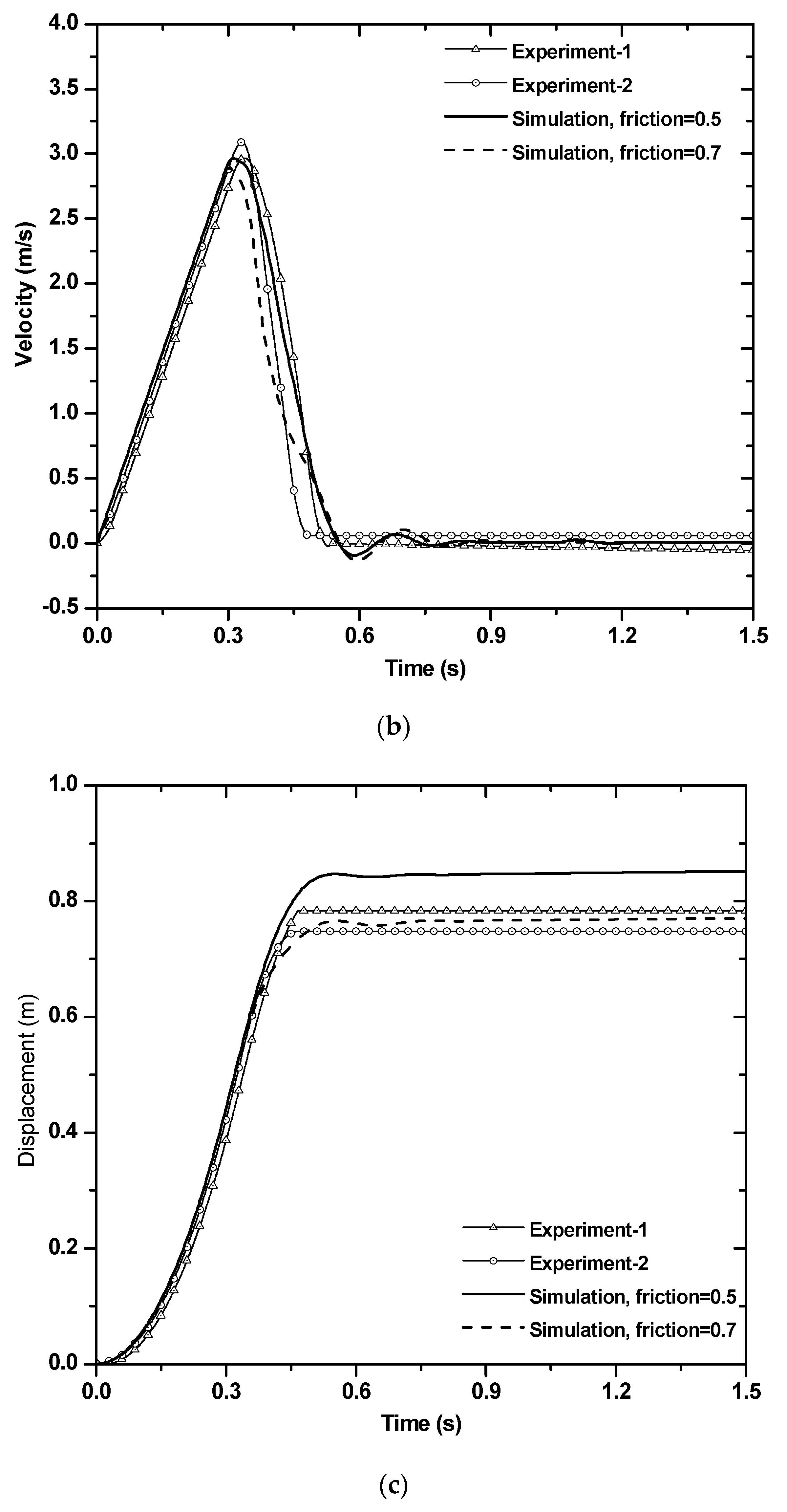
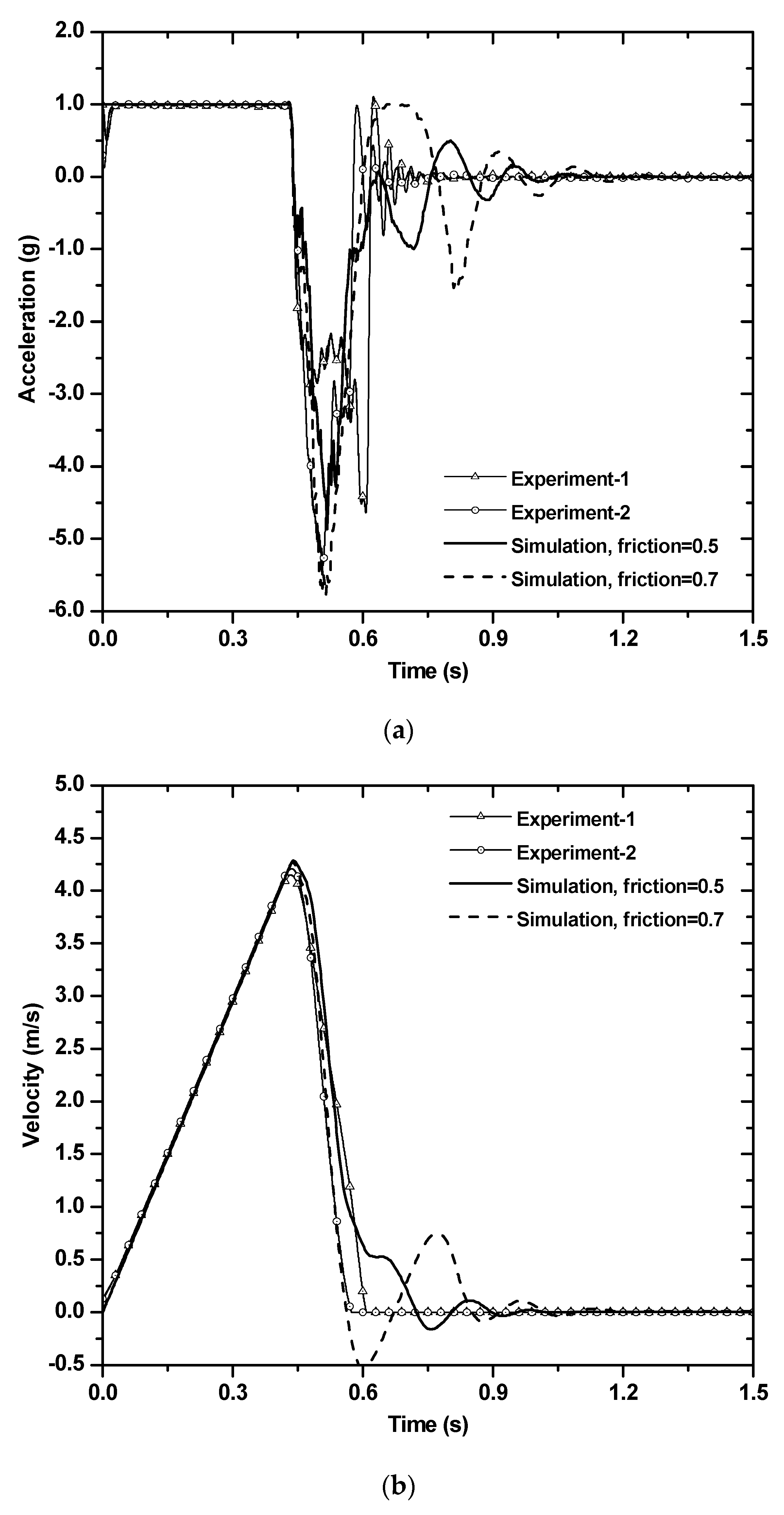
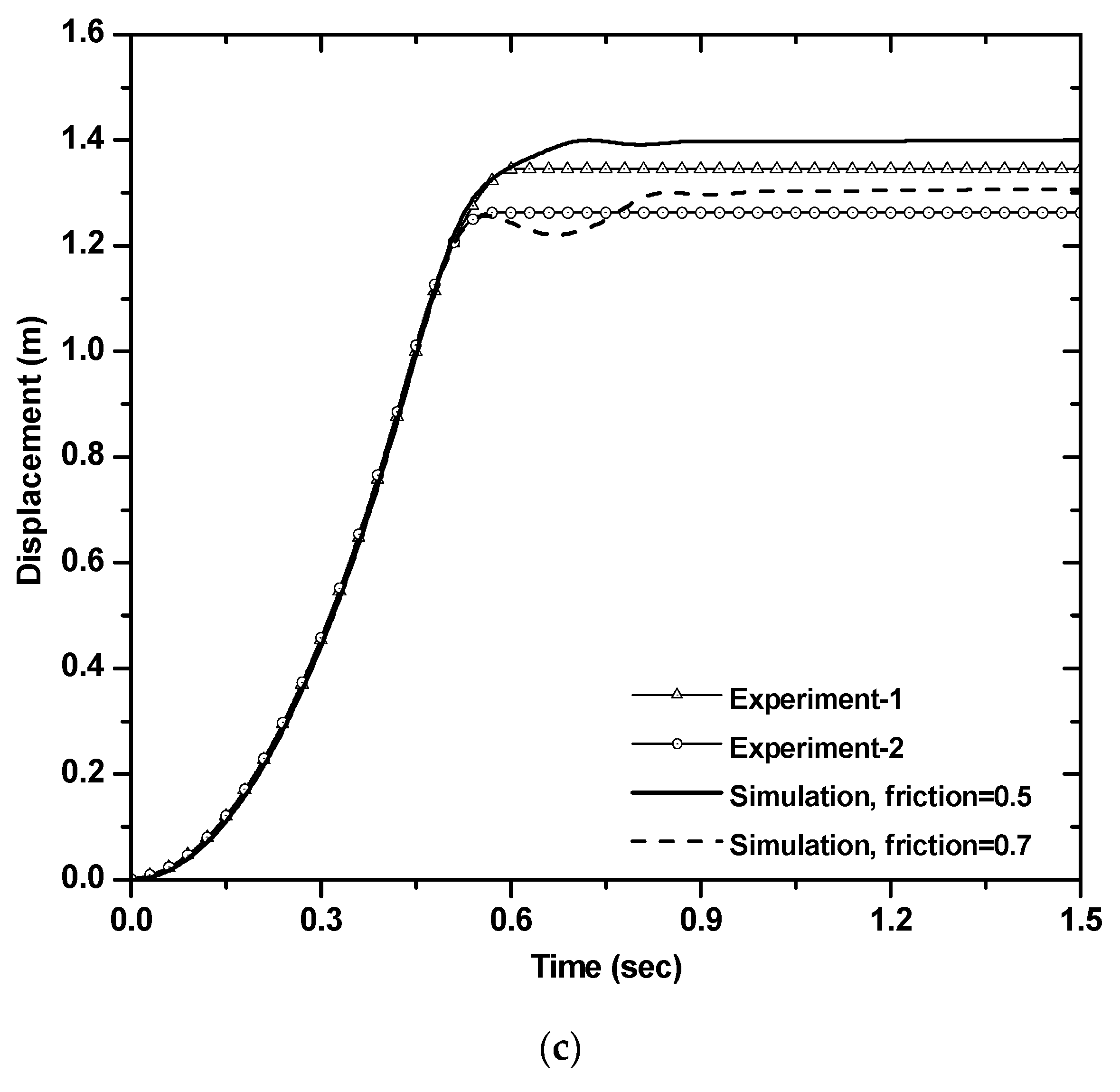
An experiment was conducted to examine the behavior of a freely dropped object that clashes with the gravel layer. To validate the simulation method, the motions of the dropped weight, obtained using both the experiment and the simulation, were directly compared. In addition, case studies were conducted to investigate the effects of the parameters of the gravel–gravel and gravel–object contact models on the simulation results for the ballast–wheel interaction.
2. Theoretical Background for Ballast Modeling and Analysis
Several researchers have modeled ballast using the FEM with shell and solid elements for two- and three-dimensional analyses, respectively. In such studies, the equivalent soil properties, such as elastic modulus, Poisson’s ratio, internal friction angle, dilation angle, and cohesion, should be defined using appropriate material models such as the Mohr–Coulomb model. Thus, the equivalent material properties should be evaluated for modeling track ballast filled with irregular pieces of gravel.
Although the FEM has been widely used in numerical simulations of various structural and geotechnical engineering problems, it has significant limitations regarding the modeling and simulation of the behaviors of a track ballast filled with gravel, because of the fundamental assumptions of the method. Using the FEM approach, the interlocking and separation of the gravel pieces cannot be directly considered because the conventional FEM does not allow the separation of elements attached to each other. Specifically, the collision between the ballast and the wheel of a derailed train cannot be rationally simulated using conventional FE approaches because of this limitation. Thus, the ballast should be modeled using another approach.
The DEM is one of the alternative solutions for modeling track ballast. Using the DEM approach, each piece of gravel can be modeled as an individual object that does not share nodes. Thus, all the pieces of gravel in contact can be detached and re-attached after their positions are updated. Therefore, the limitation of the FE approach can be overcome using the DEM. Based on the advantages of the DEM approach, an appropriate simulation strategy for modeling gravel ballast and simulating ballast–wheel collisions is suggested in this study.
2.1. DEM Analysis
In a DEM analysis, the individual objects are modeled as rigid bodies. The simplest way to model gravel is to use spherical rigid bodies. For modeling gravel pieces as simple rigid bodies, an appropriate contact model should be used to consider the elasticity of the actual object. Hence, after modeling the rigid bodies using the contact model between them, the analysis can be conducted. The analysis is performed based on Newton’s second law. Hence, the increments in the velocity and displacement of the individual bodies due to the applied loads are determined by calculating their acceleration.
Figure 3 shows the general procedure of the DEM analysis based on an explicit structural dynamic analysis.
At the preparation stage, the initial positions and velocities of the rigid bodies are defined. Because all the objects are considered as individual rigid bodies, initial overlapping between contacted objects is not allowed. Therefore, if the initial position of each object is defined, the initial analysis should be conducted to determine the appropriate position without any overlapping. To avoid the initial analysis and define the appropriate initial positions of the objects, a numerical method such as particle packing can be used. The details of particle packing are described in the next section.
Once the initial conditions are defined, including the initial positions, velocities, and boundary conditions of the domain, the dynamic analysis can be conducted to obtain the dynamic structural responses of all the objects, including the rigid bodies and deformable structural members, in the model. Again, the DEM analysis is suitable for dynamic problems because the displacement increments are calculated by integrating the acceleration increments. As shown in
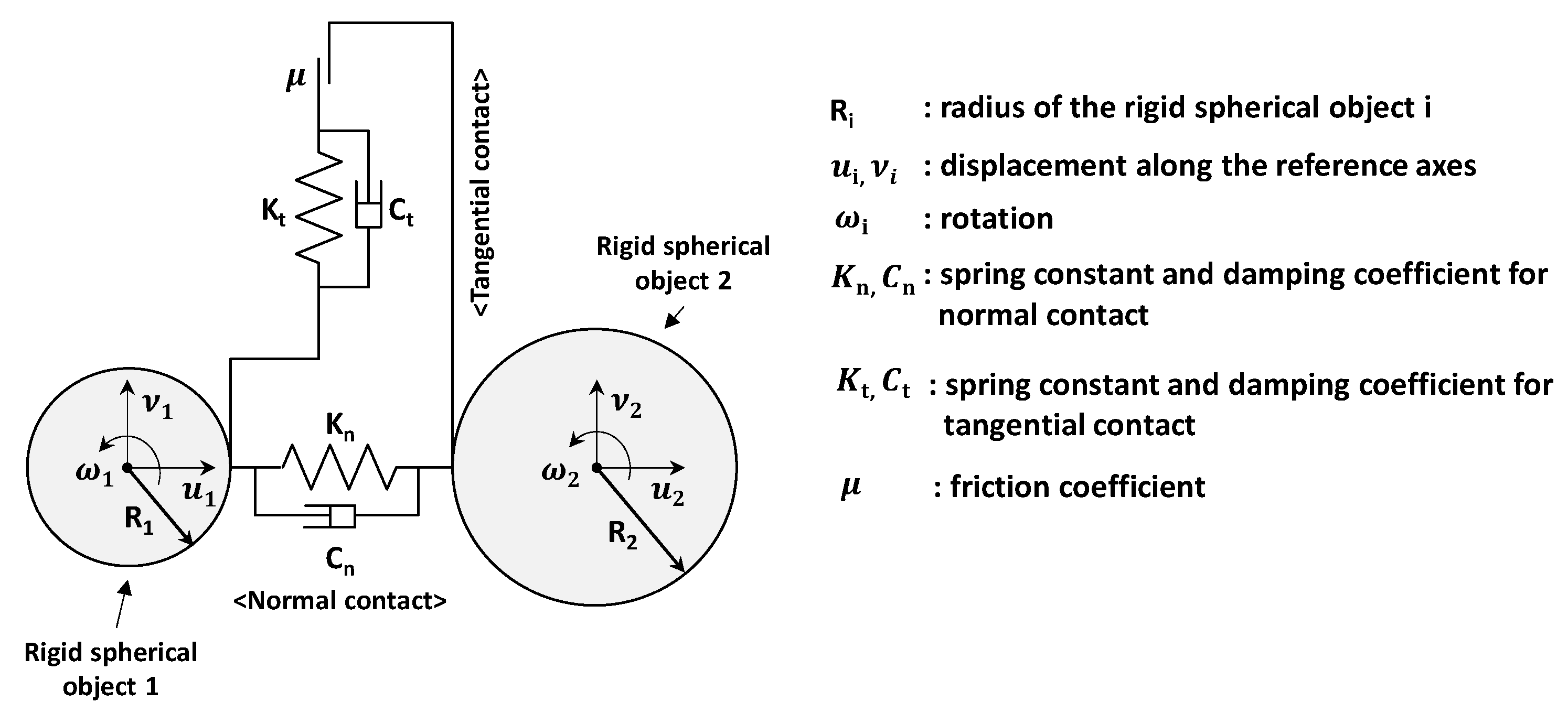
Figure 2, the collision between individual bodies is verified to determine whether the contact force and torque should be calculated or not. If the force and torque of the object are not calculated, the acceleration increment of the object is calculated using the force and moment determined at the previous time step. If the force and torque have to be calculated, the forces are calculated based on the pre-defined contact model. Various contact models exist for DEM analysis. Among these, the Hertz-based model was used in this study because the model can be effectively applied for considering contact behaviors of elastic bodies modelled as rigid spherical bodies. The applied contact model is shown in
Figure 4.
Using the contact model, the elastic behavior of the object can be taken into account, even though the objects are modeled as rigid bodies for numerical simplicity. Thus, the stiffness for normal contact is estimated considering the elastic modulus and the size of the objects in contact. In addition, the friction between the objects in contact is considered as a tangential contact force. Once the friction coefficient for the objects in contact is defined, the friction force can be calculated because the normal force has been calculated. In this simulation, a simple linear friction model was applied. Consequently, all the force components required for defining the motion equation of each object, including inertia and damping forces, were calculated and considered. The normal contact force
between two spherical particles in contact can be calculated using the Hertz solution, as shown in Equation (1):
where
;
;
is the Young’s modulus of particle
i;
is the Poisson’s ratio of particle
i; and
is the normal overlap between two spherical particles in contact.
As shown in Equation (1), evaluation of is very important because it determines the contact force . In the simulation, was evaluated as the approach distance between remote points on the contacting spheres in every time increment during explicit dynamic analysis.
The tangent contact force can be calculated using the pre-defined friction coefficient , while the damping forces and can be calculated using the pre-defined damping coefficients and , respectively.
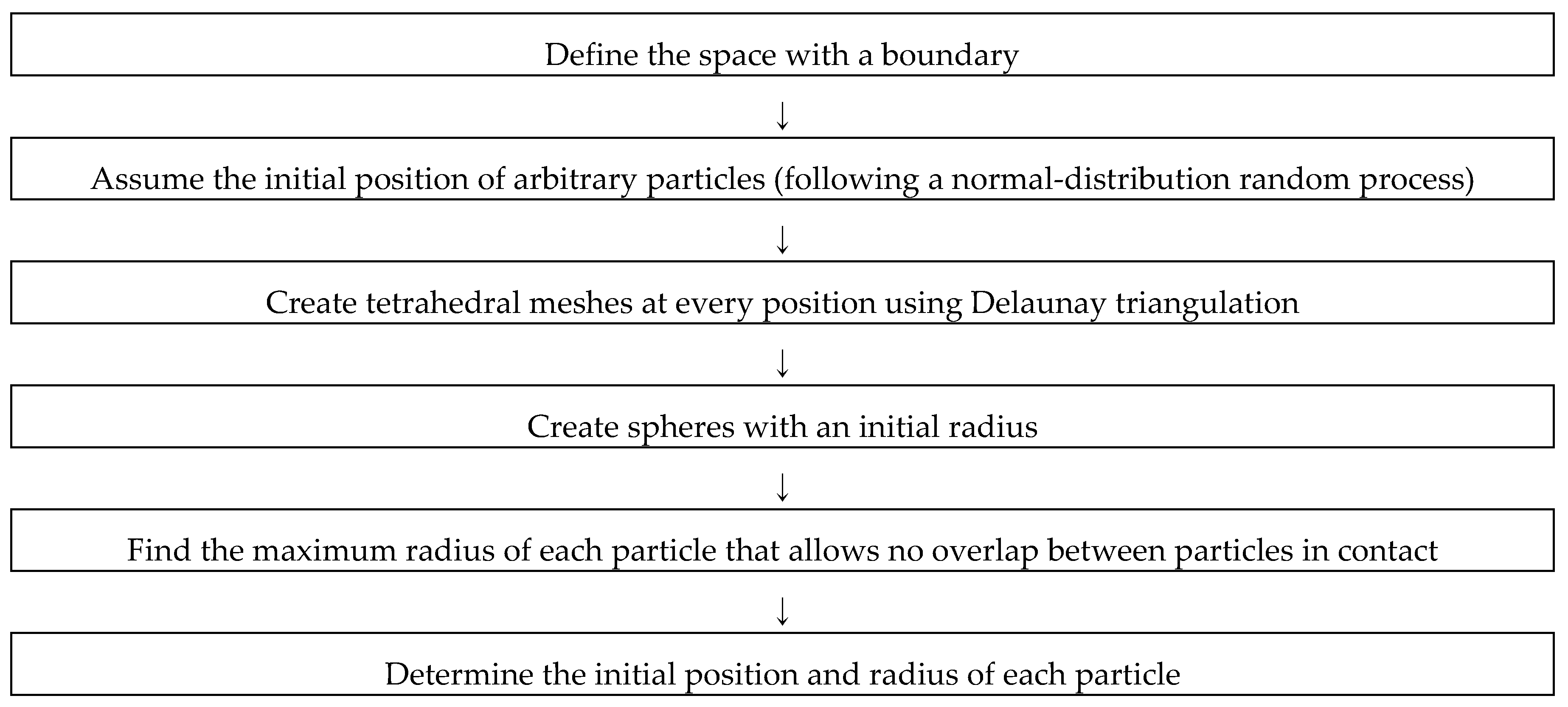
As mentioned previously, a rational definition of the initial position of the objects is important. Particle packing is one of the useful methods for modeling a layer filled with rigid particles. In this study, a random particle-packing method was primarily used to model the track ballast filled with irregularly sized gravel pieces.
Figure 5 presents the general procedure of the packing method.
2.2. Korean Regulations for Size Distribution of Ballast Gravel
In Korea, the size distribution of the gravel for track ballast is determined according to the specifications for railroad equipment [
18].
Table 1 shows the details of the size distribution of the gravel for track ballast presented by the regulation.
The procedure shown in
Figure 5 is followed using the given number of particles. Thus, this procedure can be performed to determine the maximum radius of each particle for the given boundary with the given number of particles. To achieve the required size distribution for the gravel layer, the procedure shown in
Figure 5 should be revised. First, the number of particles should be treated as one of the variables to be determined via the optimization process. Therefore, the variables to be found are the number of particles and the size and initial location of each particle. The boundary is considered as the dimensions of the target layer to be formed. The object functions to be minimized are defined by calculating the overlapping length and void of the layer.
Figure 6 shows the revised process for the close packing.
The revised procedure can be successfully performed based on the genetic algorithm, which is a powerful optimization algorithm. Using this procedure, close packing of the particles can be obtained considering the given size distribution.



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}