Image Quality Improvement and Memory-Saving in a Permanent-Magnet-Array-Based MRI System


Abstract
1. Introduction
2. Theory
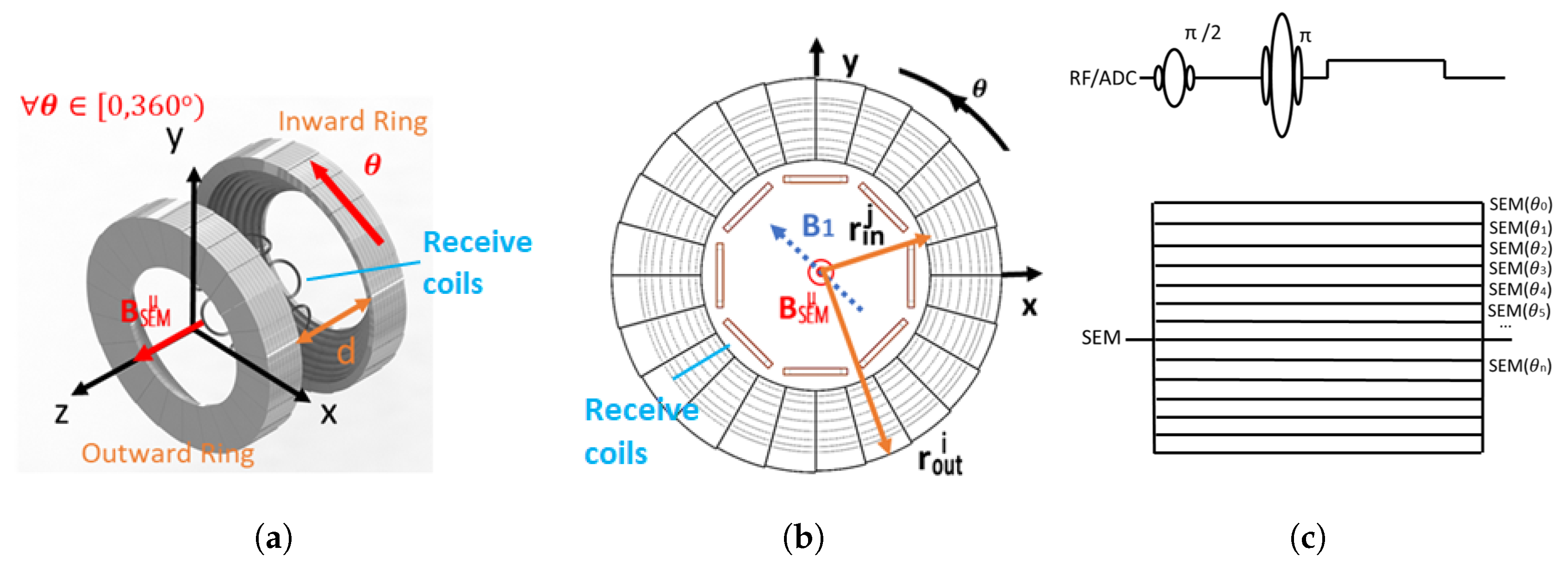
2.1. Signal Equation & Iterative Matrix Method for Image Reconstruction in a PMA-Based MRI System
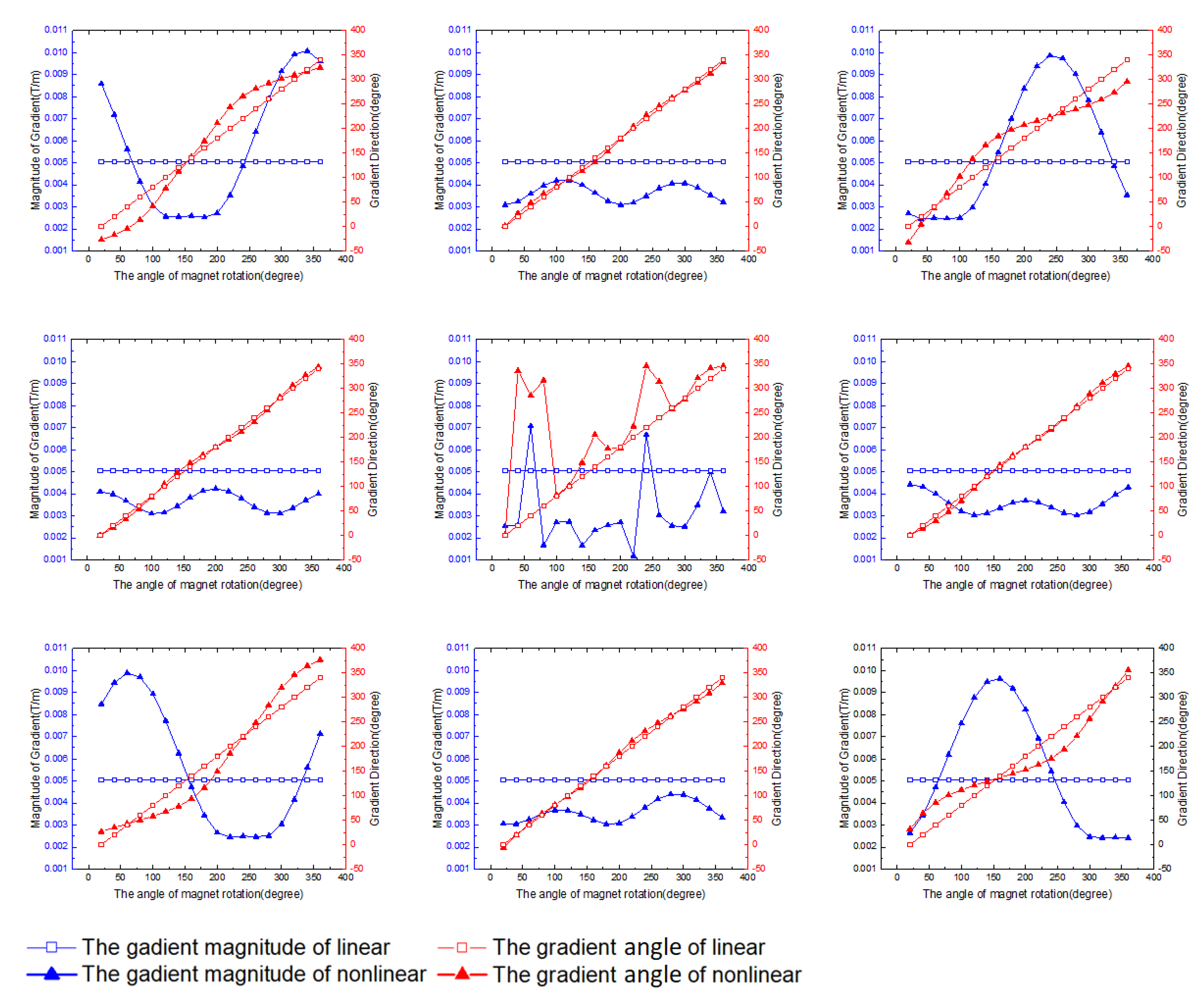
2.2. Characteristics of a Non-Linear SEM Supplied by a PMA
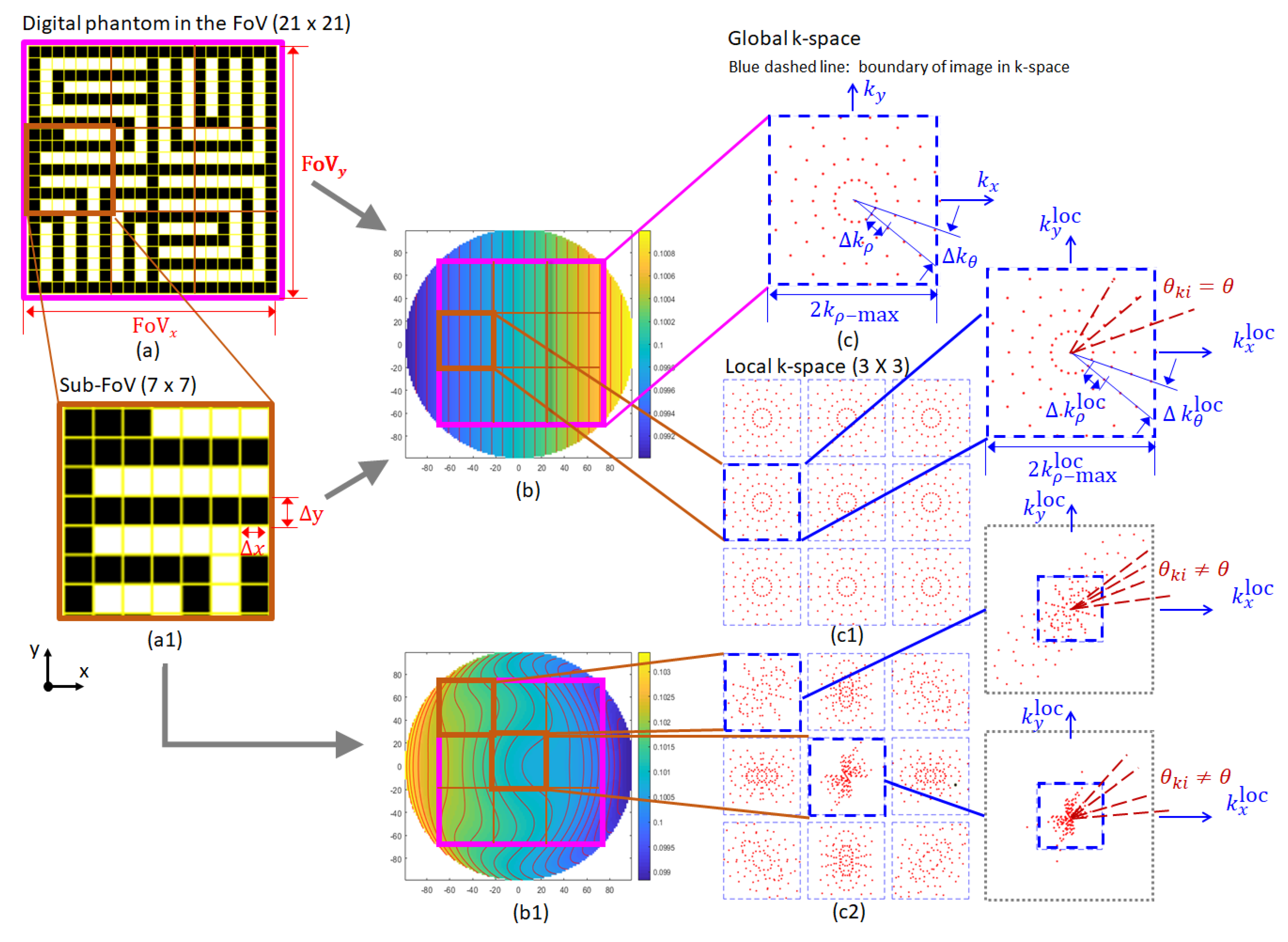
3. Investigation on the Approaches to Improve Image Quality by Increasing the Density of the Signal Space
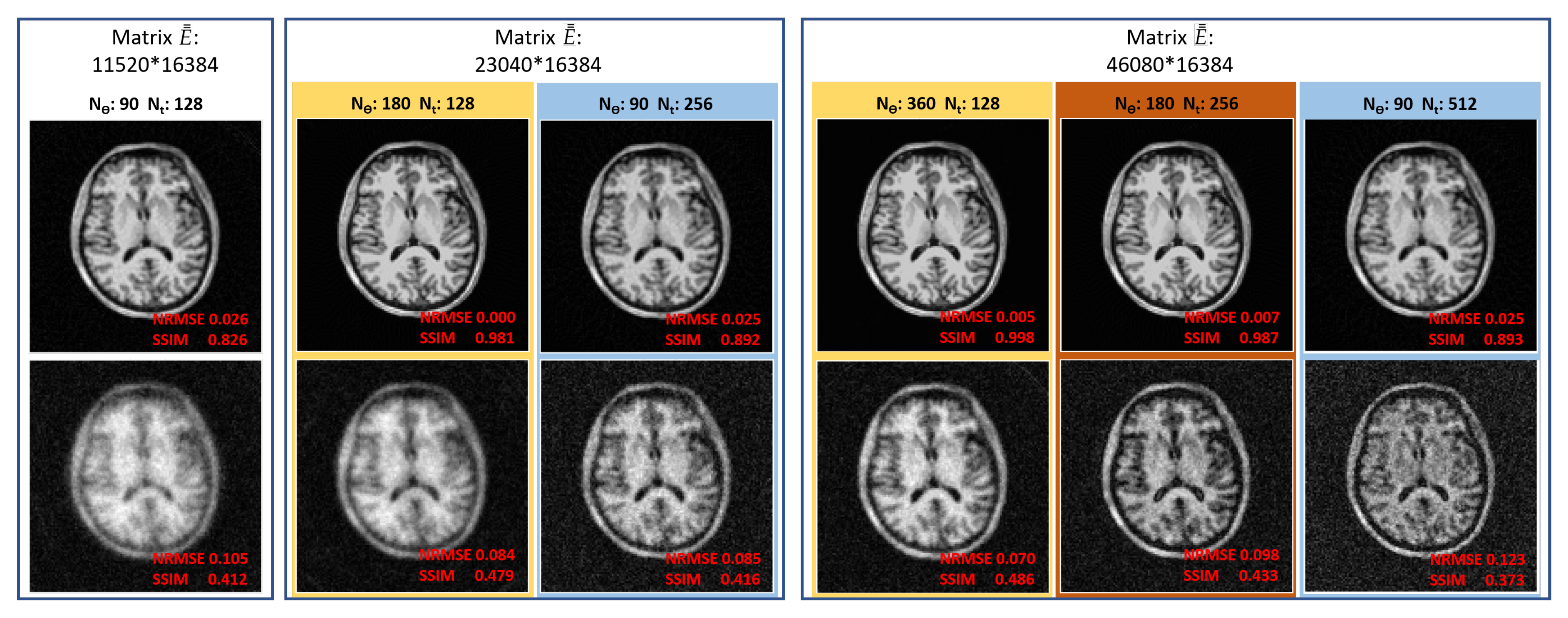
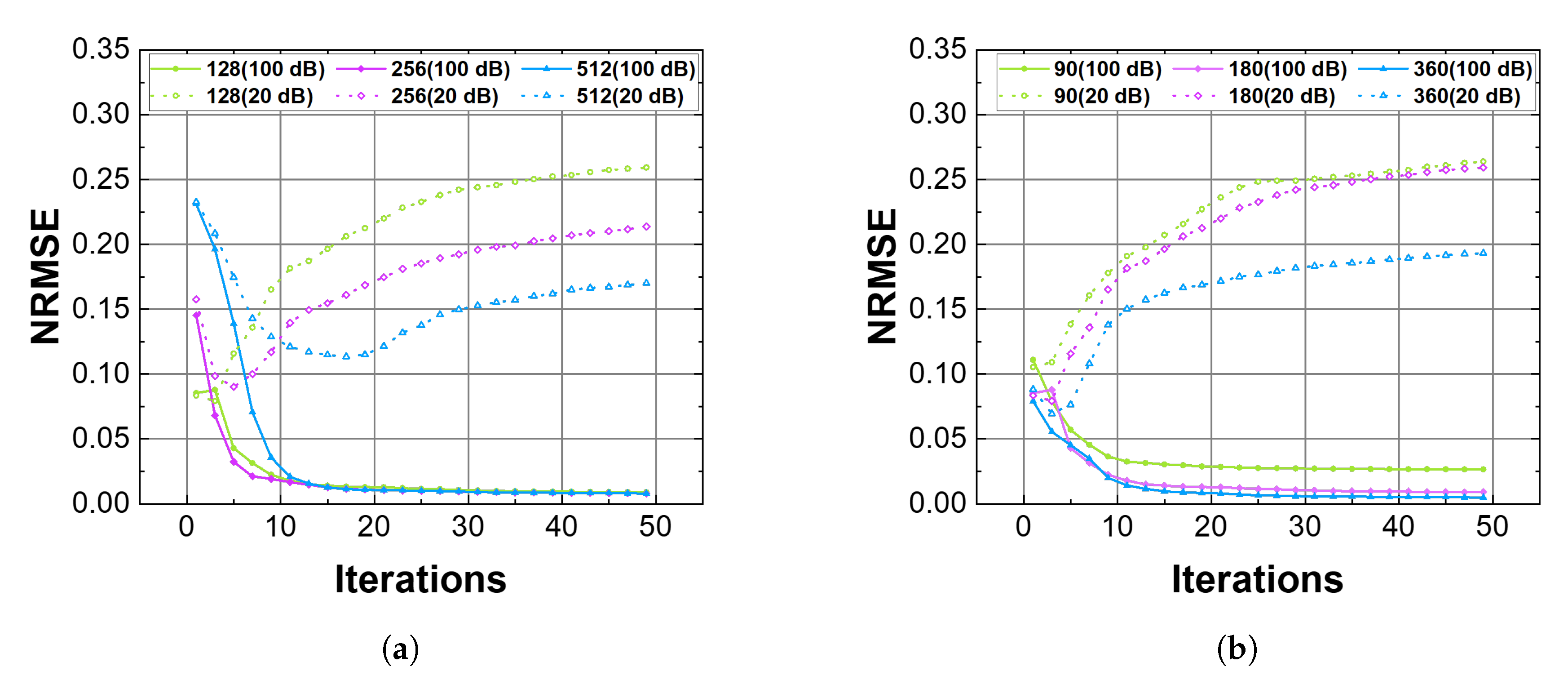
3.1. Effects on Image Quality Improvement
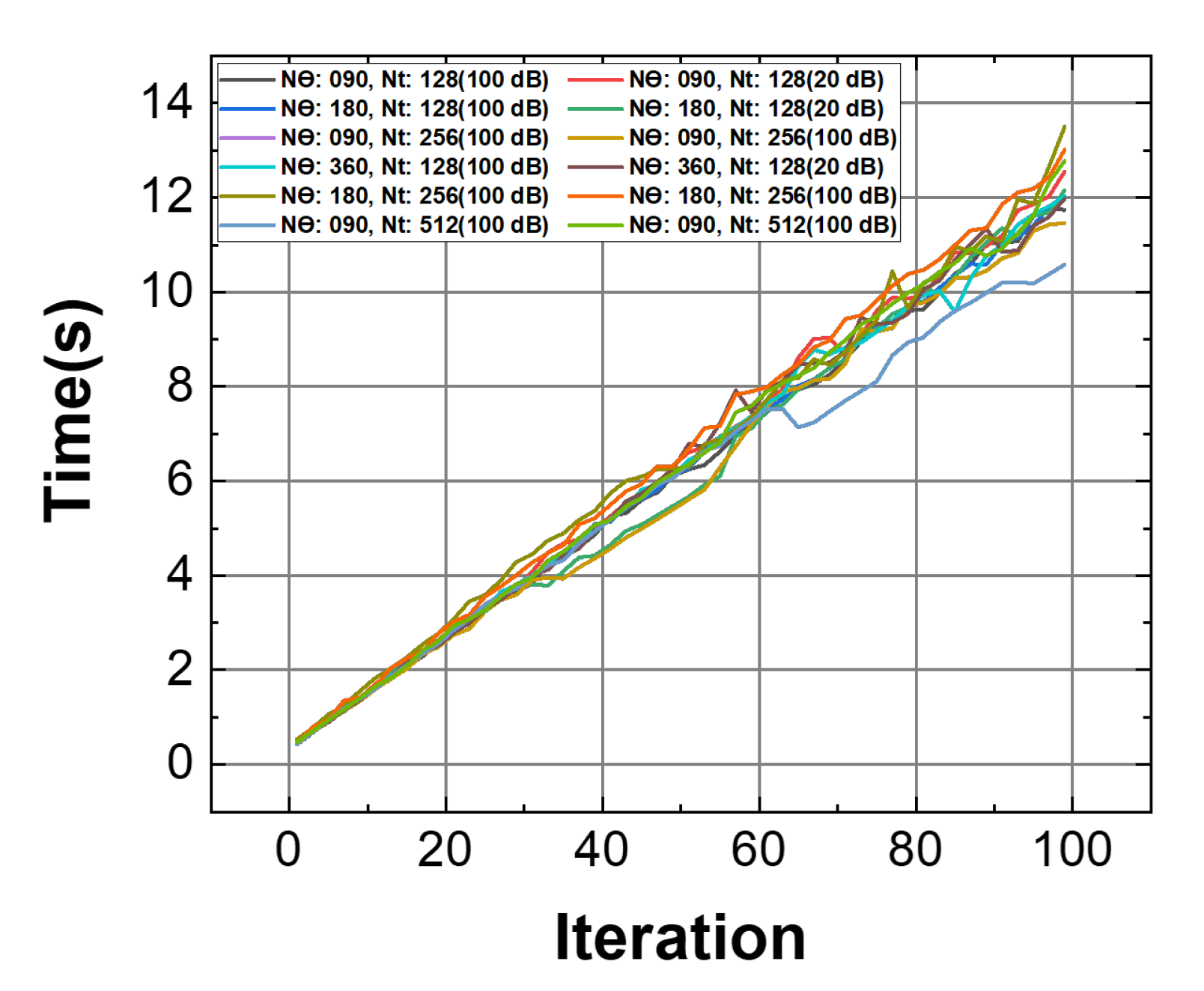
3.2. Effects on Image Reconstruction Time
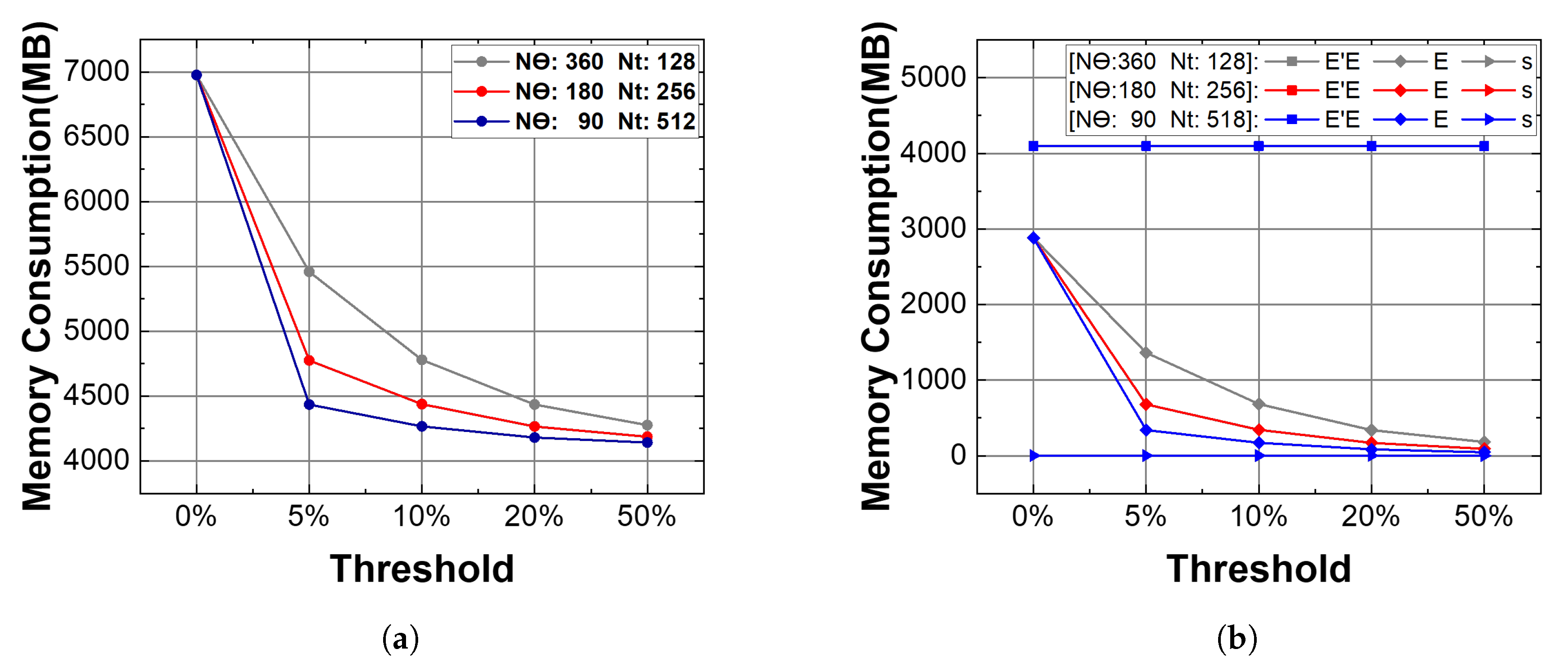
3.3. Effects on Memory Consumption
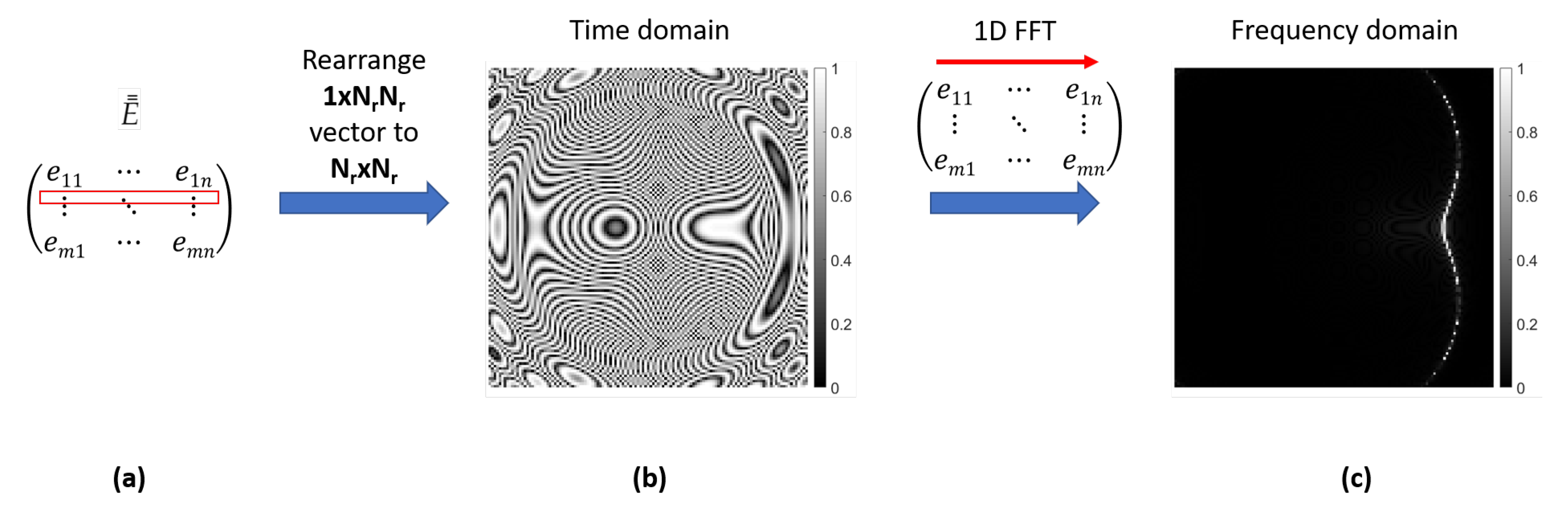
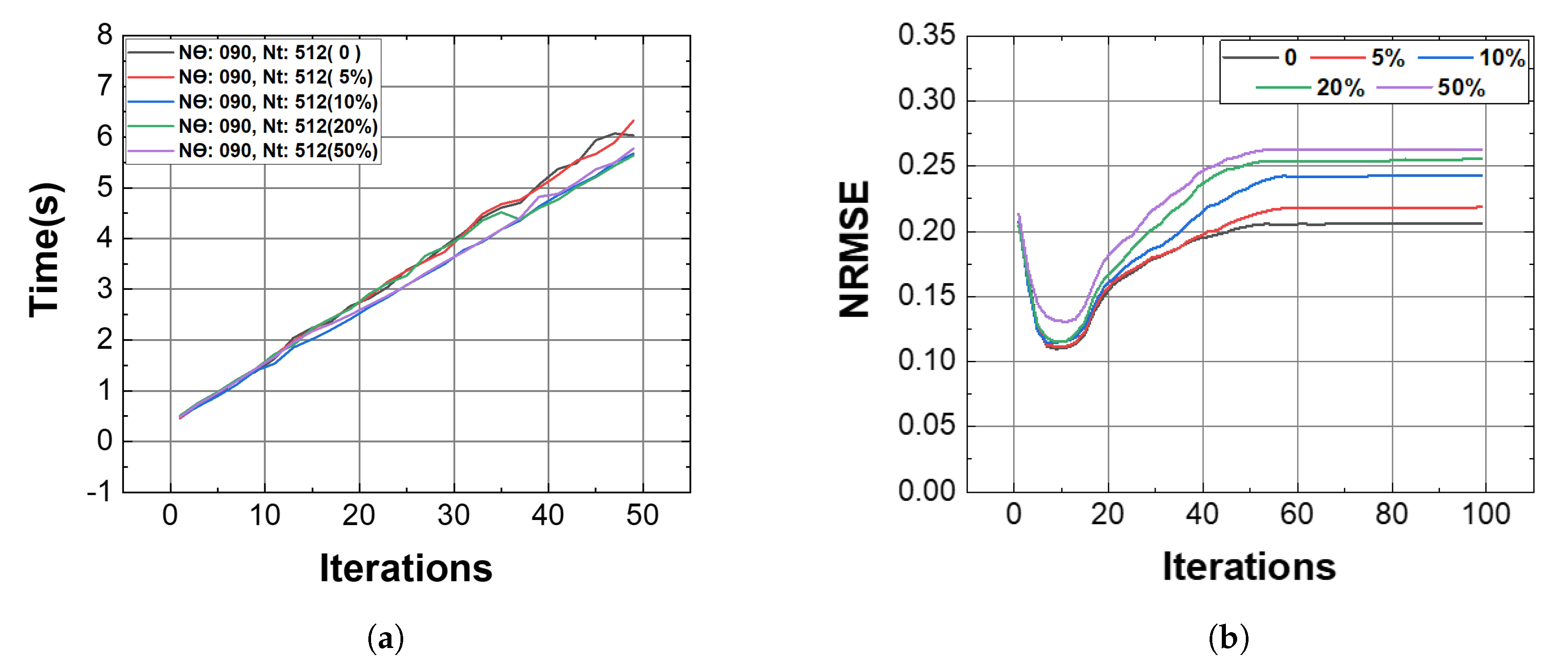
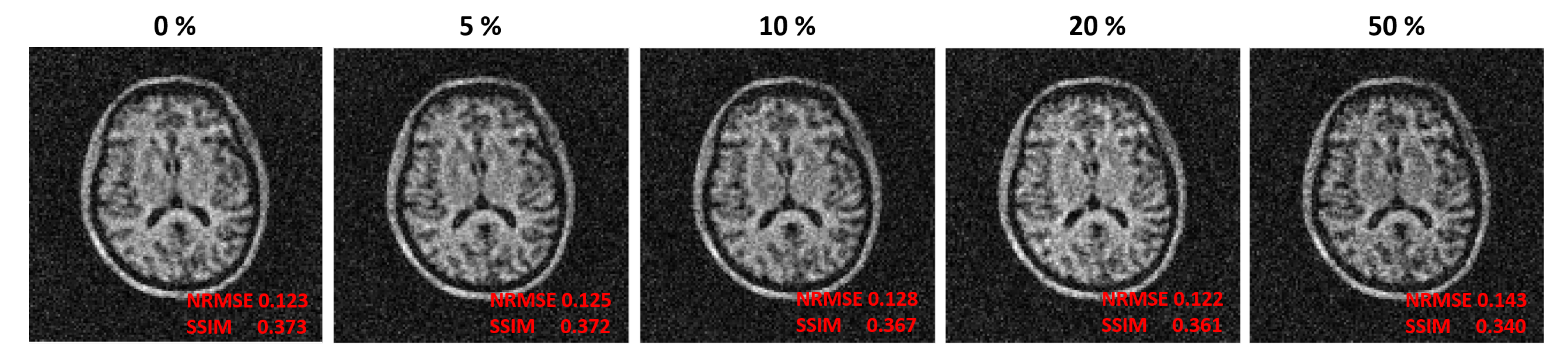
4. The Memory-Saving Reconstruction
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| MRI | magnetic resonance imaging |
| PMA | permanent magnet array |
| SEM | spatial encoding magnetic field |
References
- Huang, S.Y.; Ren, Z.H.; Obruchkov, S.; Gong, J.; Dykstra, R.; Yu, W. Portable Low-cost MRI System based on Permanent Magnets/Magnet Arrays. Investig. Magn. Resonance Imaging (iMRI) 2019, 23, 179–201. [Google Scholar] [CrossRef]
- Gong, J.; Huang, S.Y.; Ren, Z.H.; Yu, W. Effects of Encoding Fields of Permanent Magnet Arrays on Image Quality in Low-field Portable MRI Systems. IEEE Access 2019, 7, 80310–80327. [Google Scholar] [CrossRef]
- Cooley, C.Z.; Stockmann, J.P.; Armstrong, B.D.; Sarracanie, M.; Lev, M.H.; Rosen, M.S.; Wald, L.L. Two-dimensional imaging in a lightweight portable MRI scanner without gradient coils. Magn. Resonance Med. 2015, 73, 872–883. [Google Scholar] [CrossRef]
- Ren, Z.H.; Maréchal, L.; Luo, W.; Su, J.; Huang, S.Y. Magnet array for a portable magnetic resonance imaging system. In Proceedings of the 2015 IEEE MTT-S 2015 International Microwave Workshop Series on RF and Wireless Technologies for Biomedical and Healthcare Applications (IMWS-BIO), Taipei, Taiwan, 21–23 September 2015; pp. 92–95. [Google Scholar]
- Ren, Z.H.; Mu, W.C.; Huang, S.Y. Design and optimization of a ring-pair permanent magnet array for head imaging in a low-field portable mri system. IEEE Trans. Magn. 2019, 55, 1–8. [Google Scholar] [CrossRef]
- Ren, Z.H.; Gong, J.; Huang, S.Y. An Irregular-shaped Ring-Pair Magnet Array with a Monotonic Field Gradient for 2D Head Imaging in Low-field Portable MRI. IEEE Access 2019. [Google Scholar] [CrossRef]
- Esparza-Coss, E.; Cole, D.M. A low cost MRI permanent magnet prototype. AIP Conf. Proc. 1998, 440, 119–129. [Google Scholar]
- Rokitta, M.; Rommel, E.; Zimmermann, U.; Haase, A. Portable nuclear magnetic resonance imaging system. Rev. Sci. Instrum. 2000, 71, 4257–4262. [Google Scholar] [CrossRef]
- Kimura, T.; Geya, Y.; Terada, Y.; Kose, K.; Haishi, T.; Gemma, H.; Sekozawa, Y. Development of a mobile magnetic resonance imaging system for outdoor tree measurements. Rev. Sci. Instrum. 2011, 82, 053704. [Google Scholar] [CrossRef] [PubMed]
- Nakagomi, M.; Kajiwara, M.; Matsuzaki, J.; Tanabe, K.; Hoshiai, S.; Okamoto, Y.; Terada, Y. Development of a small car-mounted magnetic resonance imaging system for human elbows using a 0.2 T permanent magnet. J. Magn. Resonance 2019, 304, 1–6. [Google Scholar] [CrossRef] [PubMed]
- Eidmann, G.; Savelsberg, R.; Blümler, P.; Blümich, B. The NMR MOUSE, a mobile universal surface explorer. J. Magn. Reson. 1996, 122, 104–109. [Google Scholar] [CrossRef]
- Cooley, C.Z.; Haskell, M.W.; Cauley, S.F.; Sappo, C.; Lapierre, C.D.; Ha, C.G.; Stockmann, J.P.; Wald, L.L. Design of sparse Halbach magnet arrays for portable MRI using a genetic algorithm. IEEE Trans. Magn. 2017, 54, 1–12. [Google Scholar] [CrossRef] [PubMed]
- Hennig, J.; Welz, A.M.; Schultz, G.; Korvink, J.; Liu, Z.; Speck, O.; Zaitsev, M. Parallel imaging in non-bijective, curvilinear magnetic field gradients: A concept study. Magn. Resonance Mater. Phys. Biol. Med. 2008, 21, 5. [Google Scholar] [CrossRef] [PubMed]
- Gallichan, D.; Cocosco, C.A.; Dewdney, A.; Schultz, G.; Welz, A.; Hennig, J.; Zaitsev, M. Simultaneously driven linear and nonlinear spatial encoding fields in MRI. Magn. Resonance Med. 2011, 65, 702–714. [Google Scholar] [CrossRef] [PubMed]
- Gallichan, D.; Cocosco, C.A.; Schultz, G.; Weber, H.; Welz, A.M.; Hennig, J.; Zaitsev, M. Practical considerations for in vivo MRI with higher dimensional spatial encoding. Magn. Resonance Mater. Phys. Biol. Med. 2012, 25, 419–431. [Google Scholar] [CrossRef] [PubMed][Green Version]
- Lin, F.H.; Witzel, T.; Schultz, G.; Gallichan, D.; Kuo, W.J.; Wang, F.N.; Hennig, J.; Zaitsev, M.; Belliveau, J.W. Reconstruction of MRI data encoded by multiple nonbijective curvilinear magnetic fields. Magn. Resonance Med. 2012, 68, 1145–1156. [Google Scholar] [CrossRef]
- Schultz, G.; Gallichan, D.; Reisert, M.; Hennig, J.; Zaitsev, M. MR image reconstruction from generalized projections. Magn. Resonance Med. 2014, 72, 546–557. [Google Scholar] [CrossRef]
- Stockmann, J.P.; Ciris, P.A.; Galiana, G.; Tam, L.; Constable, R.T. O-space imaging: Highly efficient parallel imaging using second-order nonlinear fields as encoding gradients with no phase encoding. Magn. Resonance Med. 2010, 64, 447–456. [Google Scholar] [CrossRef]
- Schultz, G.; Ullmann, P.; Lehr, H.; Welz, A.M.; Hennig, J.; Zaitsev, M. Reconstruction of MRI data encoded with arbitrarily shaped, curvilinear, nonbijective magnetic fields. Magn. Resonance Med. 2010, 64, 1390–1403. [Google Scholar] [CrossRef]
- Schultz, G.; Weber, H.; Gallichan, D.; Witschey, W.R.; Welz, A.M.; Cocosco, C.A.; Hennig, J.; Zaitsev, M. Radial imaging with multipolar magnetic encoding fields. IEEE Trans. Med Imaging 2011, 30, 2134–2145. [Google Scholar] [CrossRef]
- Mu, W.C.; Gong, J.; Ren, Z.H.; Yu, W.; Huang, S.Y. Sparse Inward-outward (IO) Ring-Pair Permanent Magnet Array (PMA) with a Light Rotation Load for Low-field Head Portable MRI. Preprint 2019. [Google Scholar] [CrossRef]
- De Leeuw den Bouter, M.L.; van Gijzen, M.B.; Remis, R.F. Conjugate gradient variants for p-regularized image reconstruction in low-field MRI. SN Appl. Sci. 2019, 1, 1736. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| = | Total | |||
|---|---|---|---|---|
| = 90, = 128 | 4096 MB | 2880 MB | 0.1758 MB | 6976 MB |
| = 180, = 128 | 4096 MB | 5760 MB | 0.3515 MB | 9856 MB |
| = 90, = 256 | 4096 MB | 5760 MB | 0.3515 MB | 9856 MB |
| = 360, = 128 | 4096 MB | 11,520 MB | 0.7031 MB | 15,617 MB |
| = 180, = 256 | 4096 MB | 11,520 MB | 0.7031 MB | 15,617 MB |
| = 90, = 512 | 4096 MB | 11,520 MB | 0.7031 MB | 15,617 MB |
| Threshold | = | Total | ||
|---|---|---|---|---|
| 0 | 4096 MB | 11,520 MB | 0.7 MB | 15,617 MB |
| 5% | 4096 MB | 338.8 MB | 0.7 MB | 4436 MB |
| 10% | 4096 MB | 170.7 MB | 0.7 MB | 4267 MB |
| 20% | 4096 MB | 84.5 MB | 0.7 MB | 4181 MB |
| 50% | 4096 MB | 45.1 MB | 0.7 MB | 4142 MB |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gong, J.; Yu, W.; Huang, S.Y. Image Quality Improvement and Memory-Saving in a Permanent-Magnet-Array-Based MRI System. Appl. Sci. 2020, 10, 2177. https://doi.org/10.3390/app10062177
Gong J, Yu W, Huang SY. Image Quality Improvement and Memory-Saving in a Permanent-Magnet-Array-Based MRI System. Applied Sciences. 2020; 10(6):2177. https://doi.org/10.3390/app10062177
Chicago/Turabian StyleGong, Jia, Wenwei Yu, and Shao Ying Huang. 2020. "Image Quality Improvement and Memory-Saving in a Permanent-Magnet-Array-Based MRI System" Applied Sciences 10, no. 6: 2177. https://doi.org/10.3390/app10062177
APA StyleGong, J., Yu, W., & Huang, S. Y. (2020). Image Quality Improvement and Memory-Saving in a Permanent-Magnet-Array-Based MRI System. Applied Sciences, 10(6), 2177. https://doi.org/10.3390/app10062177