Abstract
This article presents a holistic methodology for planning, optimization and integration of exoskeletons for human-centered workplaces, with a focus on the automotive industry. Parts of current and future challenges in this industry (i.e., need of flexible manufacturing but as well having demographic change) are the motivation for this article. This challenges should be transformed in positive effectiveness by integrating of exoskeletons regarding this article. Already published research work from authors are combined in a form of summary, to get all relevant knowledge, and especially results, in a coherent and final context. This article gives interested newcomers, as well as experienced users, planners and researchers, in exoskeleton technology an overview and guideline of all relevant parts: from absolute basics beginning until operative usage. After fixing the motivation with resulting three relevant research questions, an introduction to the exoskeleton technology and to the current challenges in planning and optimizing the ergonomics and efficiency in manufacturing are given. A first preselection method (called ExoMatch) is presented to find the most suitable exoskeleton for workplacesm by filtering and matching all the important analyzed attributes and characteristics under consideration to all relevant aspects from environments. The next section treats results regarding an analysis of influencing factors by integrating exoskeletons in manufacturing. In particular, ergonomic-related and production-process-related (especially time-management) influences identified and researched in already published works are discussed. The next important step is to present a roadmap as a guideline for integration exoskeleton. This article gives relevant knowledge, methodologies and guidelines for optimized integrating exoskeleton for human-centered workplaces, under consideration of ergonomics- and process-related influences, in a coherent context, as a result and summary from several already published research work.
1. Introduction
The objectives of this work are derived from the effectiveness of integrating disruptive innovations like exoskeleton technology into the manufacturing workplace and into the strategic planning of manufacturing factories. The research questions, hypotheses and approaches are specific consequences of these objectives. The current challenges for manufacturing at all scales, from network to site of production, production area, production system, workplace and production process, are derived from the final goal, the improvement of effectiveness. Of course there are many more impacts from all different areas, like psychophysical and financial. This goal can be achieved by answering the research questions stated by the authors and depicted in Figure 1, with the focus on disruptive innovation and promising exoskeleton technology. However, the next steps of this research will deepen this focus and will approach it in synergy with other technologies, which cannot be further extensively discussed here.
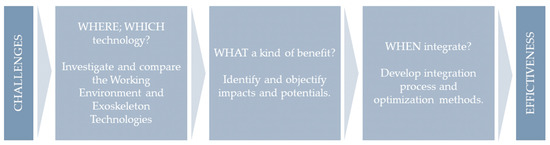
Figure 1.
Objective: research questions, solution approach and hypotheses.
The first section of the paper presents an overview of the exoskeleton technology and the challenges of planning and optimizing the human-centred workplaces in manufacturing, based on the already published work [1]. Excerpts from this publication regarding the classification of workplaces and exoskeletons types answer the first research question on the way to improve effectiveness in manufacturing. In order to answer the second question, all the impacts and identified improvement potentials must be recognized first. This is accomplished with excerpts from the publication [2]. The current state-of-the art does not reveal ergonomics evaluation methods of workplaces with integrated exoskeleton technology. Excerpts from the publication [3] are used to investigate previously common procedures for their influence. With regard to the effects of time, in the context of this paper, the publication [4] of the results of wearing/unwearing times is presented.
The last section, Section 6, presents a short overview of a roadmap to integrate and optimize exoskeletons step by step.
2. Problem Statement and Motivation
Exoskeletons are worn externally and support body movement like a power suit does. The concept was first mentioned in 1966 [5]. Further uses and developments were found in the military sector, to enhance soldiers’ strengths. Medical exoskeletons were developed to support disabled or handicapped people during their rehabilitation process and to support everyday life, for example, of patients with a disability. The motivation to use exoskeletons in the industry to assist and help workers to achieve daily tasks is based on these two different approaches. Exoskeletons are predominantly used preemptively in production to enhance the actual ergonomic work situation of the workers. Studies prove that such a preemptive investment has long-term financial benefits for the company in the coefficient of 1.445 [6]. In a future vision, exoskeletons will be able to assist disabled workers and therefore give them the ability to reintegrate. As a result, the reduction of lost workdays can be expected. At this time, in Germany, 26% of all lost workdays are caused by muscle–skeletal disorders (MSD) [7]. Furthermore, studies prove that, in Europe, charges of 240 billion euros (which is about 2% of GDP) are caused by MSD [8]. Equally positive side effects can be expected in the manufacturing area, like increased productivity and efficiency. For instance, increased productivity in specific sub-processes can be monitored because working with an exoskeleton is more intuitive and therefore faster than working with expensive mobile lifting assistance [9]. These systems lead to bad ergonomic situations, although the workplace is rated positive, and are therefore seldom used. Such results and ergonomic evaluations are conducted with analysis of simulations [10], where exoskeletons are worn virtually [11] in manufacturing facilities. Likewise, an increase in quality [12] and optimization was traceable in some areas [13,14]. Compared to other static technical assistant systems [15], bodyworn exoskeletons are intuitively operable. This increases the flexibility of the processes in manufacturing and is very important for consistent competitiveness [16] and mass customization, which will consist of manual processes or the processes that are difficult to be automated [17]. In summy, all facts mentioned above sustain the employment of exoskeletons for industry.
3. Methodology for the Integration of Exoskeleton Technology in Manufacturing Workplaces
3.1. Challenges and Specific Requirements for Integration of Exoskeletons in Industry
The selection of the suitable exoskeletons is done currently on a subjective base, depending on the specific workplace and worker. It should be scientificly founded, objectified and process-driven, but flexible, in the future. The following methods for preselecting suitable exoskeletons depending on the workplace are new in the scientific state. On this base, this paper describes objective methods (ExoScore and ExoMatch) which consider, filter and match important attributes from exoskeletons to workplaces in order to find the most suitable. Likewise, adjustments of workplaces and exoskeletons are needed to optimize the processes. The paper defines Smart Exoskeletons as devices which can be customized in variable combinations for supporting the worker’s body. The required modules can be arms and the trunk [13]. We enhance our definition toward technical adaptivity of the Smart Adaptive Exoskeletons, which are easily adjustable for the specific workplace (working over the head, assembly, etc.),worker’s tasks (e.g., tool holding, supporting force, etc.) and worker’s status (performance, exhausting, fatigue, etc.).
The exoskeleton technology, as shown in Figure 2, is not sufficiently mature, since very few exoskeletons are available as certified products on the market. Technical definitions and certifications, or rather a declaration of conformity, are still non-final and not clearly solved challenges for most world’s markets [18,19]. Due to the recency of this innovative technology, the product is not mature enough, because current development focuses on technical details and not human or organizational challenges. This leads to inadequacy of documented experiences, including the absence of long-term studies and structured literature for considerations in practice. The abovementioned situations represent reasons for the low deployment of exoskeletons in industry. Appropriate workplaces are in most cases characterized by simple and one-sided sequences of motions, and they can be enhanced with passive exoskeletons to support the current work.
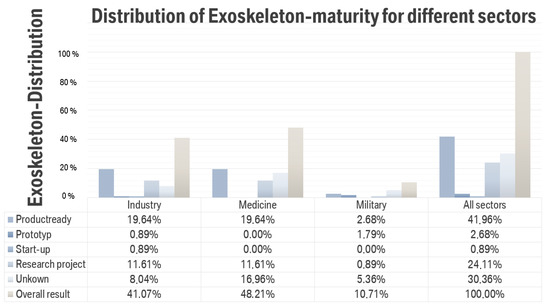
Figure 2.
Overview and statistic from state of exoskeleton maturity on each sector © [1].
3.2. Classification of Smart Adaptive Exoskeletons for Their Deployment in Manufacturing
This section classifies the exoskeletons and the workplace’s attributes. With the aim to develop a method supporting the selection of the most suitable device for a specific workplace, a database system for exoskeletons management, further on called ExoData, and workplaces management, named UseCaseData, was developed. The classified databased attributes are the base of the preassessment procedure, called ExoScore, and preselection method, named ExoMatch. The filtering of suitable exoskeletons for specific workplaces operates with the following categories, characterized by attributes, which are stated below [5]:
- General: number, priority, state of experience, etc.;
- Technical features: active/passive, power support, weight, size, material, storage, etc.;
- Compatibility: scratching, hygiene, etc.;
- Legal: conformity, occupational safety, instructions, etc.;
- Specific pro and cons: cheap, light, robust, etc.;
- Costs: acquirement, maintenance, service, training, etc.
Each of these detailed attributes has to be assessed with a weighted score-system, which will be developed. This category has a specific meaning for the subsequent specific workplace assessment and filtering. The exoskeleton Database (ExoData) has been populated with almost 140 commercial and prototype exoskeletons. The next step consists of sorting the ExoData by exoskeleton attributes for specific workplace requirements and identifying the favoured device. In addition, the procedure ExoScore enables the rough assessment of exoskeletons based on their functionalities. Further on, specific attributes were added, advanced with weighted factors (c1, c2, ci). These factors are defined depending on different planning objectives. Below, Calculation (1) is partially highlighted:
The identification of suitable exoskeletons for one specific workplace requires categorized attributes as follows:
- Project state: number, priority, processing state, etc.;
- Workplace: description, contact, location, additional tasks, required tools, etc.;
- Ergonomics: load, weight (time and attitude), etc.;
- Environment: organization, division, access ways, escape exits, stairs, etc.
This section also presents how to find the most suitable of all existing exoskeletons (from ExoData) for any workplace, with a method called ExoMatch, as shown in Figure 3 and Figure 4. The aim is to replace the previous selection with a transparent method that additionally increases the quality and decreases the working effort. In comparison to ExoScore, ExoMatch filters all available exoskeleton in ExoData, depending on the specific workplace conditions. The simple overview of the ExoMatch method is that UseCaseData and ExoData are related to each other. In Figure 3, these dependencies are solved with matching rules. These matching tables are the core of this method and are implemented as workplace conditions, and, based on these, it is possible to formulate exoskeleton requirements. The matching tables (Figure 4), where workplace conditions (orange) were translated to exoskeleton requirements (green), are structured in different filter clusters. For individual planning and complex influences, the threshold values (blue) can be adjusted or built on new tables. In Figure 4, two selected conceptual cluster tables are shown. If the ergonomic index for stress in shoulder exceeds the threshold value, there is a need for exoskeletons to support this body structure. Other examples and matching tables formulate requirements for exoskeletons with respect to the production environment. This concept makes it possible to realize general or situation-specific formulations of workplace conditions in which exoskeletons are explicitly not recommended. Additionally, the workplace planner has the chance to manually set filters which are normally not assessed in the matching tables.
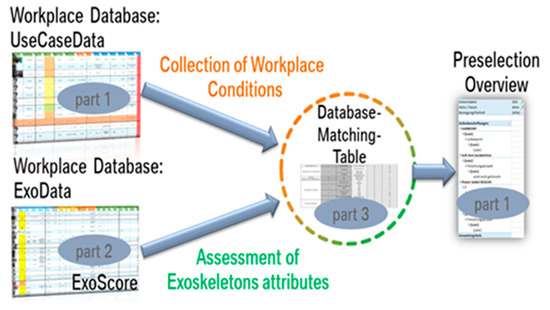
Figure 3.
ExoMatch: method for preselecting most suitable exoskeletons depending on workplace © [1].
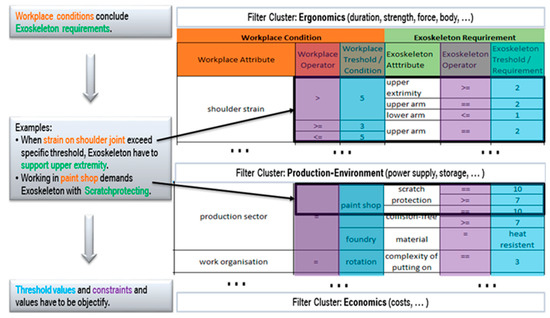
Figure 4.
Database matching tables (DBMT): implement workplace-specific filter. Workplace conditions conclude exoskeleton requirements © [1].
3.3. Holistic Impacts by Integrating Exoskeleton Technology in Manufacturing
All relevant impacts of integrating exoskeletons have to be identified, described and structured. The results discussed were listed already in the form of a table [2]. In a first step, qualitative methods are needed to decide the relevance of different impacts. After this decision, adequate quantitative methods can be used [20]. The effects of exoskeletons have two significant perspectives. First, the ergonomic workplace improvement, and second, the impacts on the production system. The main focus, the ergonomic worker support, should not have under any circumstances an adverse effect on the production system and vice versa. However, the disadvantages have to be especially considered. The best case would be that all of these impacts and corresponding conversion functions can be combined in one unambiguous unit to estimate the holistic efficiency. However, because of the complexity and the lack of conversion methods, an assessment of clearly structured impact groups are necessary. Furthermore, new technologies, like exoskeletons, are establishing new possibilities. Different quantitative measurement methods are neccessary to investigate these impacts. Costs can be calculated and compared with other technical systems. Impacts on productivity and quality are researched in the following studies [21,22]. Time measurements are defined in [22].
4. Ergonomic Assessment of Human-Centred Workplaces with Integrated Exoskeleton Technology
4.1. Chain of Reasoning of Ergonomic Assessment
The chain of reasoning and process flow as motivation of provable and applicable assessment methods of workplaces with integrated exoskeleton technology is depicted in Figure 5. In the first step, it has to be discussed whether exoskeletons have an influence on the human body (ergonomic assessment), as well as on the workplace (production system), while performing a certain task. The hypothesis is that, when no effects can be expected, further steps are not necessary. Concluding that exoskeletons have a relevant impact, the next step is to demonstrate this impact. If neither effectiveness nor effects can be demonstrated, new methods or another type of exoskeleton has to be chosen, and the abovementioned loop has to be performed. The focus is to investigate the practical applicability of the study for the holistic integration of exoskeletons. If the applied methods within the performed studies cannot address the applicability, as well as the question of ergonomic benefits, there is currently no standardized way for the widespread integration of exoskeletons in a production system.
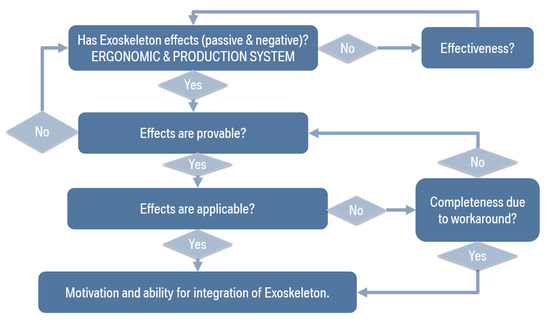
Figure 5.
Chain of reasoning to employ exoskeletons in manufacturing workplaces [3].
4.2. Review of Studies Regarding Exoskeleton Ergonomics
Looking at the literature, one can find numerous articles regarding the effects of an exoskeleton device on particular muscle groups, using electromyography (EMG), while performing certain tasks. However, the majority of these articles focuses on the impact on the muscle groups which are intended to be supported by the assistant devices [23]. The potential negative aspects, such as the biomechanical load shift to other joints or muscle groups are rarely investigated, even though studies showed that the use of exoskeletons can cause significant postural changes or result in kinematic strains [24,25,26]. Additionally, a few investigations carried out the estimation of the effects of the integration of an exoskeleton device on the ergonomic risk assessment [27]. This might be an obstacle for the large-scale implementation of exoskeletons in industrial production systems, and it supports our assumption that the existing methods are somehow limited. Rashedi proved reduced muscle activity and discomfort up to 56% by using EMG and a subjective evaluation questionnaire (RPD—The rate of perceived discomfort). The measurement of an increased discomfort due to the weight of the device is performed in [28]. More test subjects and a specialized analysis are needed to validate this.
4.3. Assessment Requirements and Selected Methods Based on Manufacturing Needs
Existing studies, identified by the authors in previous papers (summarized in [2] with link to a lot of specific studies in detail), focus on the varying influences on specific parts of the human body, but they do not aim to present the results in a simplified “assessment-score” suitable for industrial demands, i.e., figures and colours that show the impact on the individual workplace. There is a critical discrepancy between the need for accuracy and the evaluation of complex work systems. Based on these contradictory requirements, there are many assessment methods designed to handle this challenge. Some large companies have even developed their own systems to assess their workplaces (i.e. APSA and SERA) [29,30].
Hence, the next step is to evaluate the exoskeletons on different workplace assessments with the currently existing methods from [27]. The research (detailed procedure and results in [3] based on ergonomic state-of-the-art: ergonomic scripts/books, ergonomic and industry training, internet and research) turned up 36 scientific assessment methods, that were categorized, each based on one of the following: forms for monitoring tasks, questionnaires, norms and threshold tables. Input parameters for these 36 assesment methods are, for example, shift-time, work-load, movement (duration, angle and velocity), temprature, pause, space, etc. for workplace charateristics and for for support-device/exoskeleton charateristics: weight, restriction of movements, support-leverl, heating, etc. The 36 differnet methods calculate for each input parameter with different weighting, combinations and tresholds specitic scores as result (with and without exoskeleton). Characteristics are based on a description with relevant advantages and disadvantages, the scientific background, availability, field of application, considered body region and required input. All of these parameters were based on the industry requirements. The 36 methods were selected through a score system that selects and prioritizes the method with the highest amount of factors that the exoskeleton would have an impact on (i.e., force-and-exhaustion analysis, forced posture, heat, etc.), as well as the industrial applicability. After the score filter was applied with both conditions (exoskeleton impact and industry requirements), only five methods remained (shown in Table 1). For the sake of performing a holistic approach, negative aspects are included as well. The five methods selected are common industrial tools used to assess the workplace from an ergonomics perspective.

Table 1.
Results for different assessments sheets (EAWS = Ergonomic Assessment Work Sheet, TB = total body, UP = upper body, KIM = key indicator method, REBA = Rapid Entire Body Assessment, RULA = Rapid Upper Limb Assessment) [3].
4.4. Exemplarily Workplace with Integrated Exoskeleton
The exoskeleton sample used for this investigation is a passive device that supports the upper-limb region for overhead work and is specifically designed to reduce stresses during prolonged overhead work; the mainframe of these devices is fixed to the body with belts or straps. The bottom side of each upper arm lies on a pad which is connected to the mainframe. The supporting force is assumed to equal the weight of the working tools, which is generally known as a ZeroG compensation approach. Many exoskeleton manufacturers recommend this simplified approach, as the devices’ supporting forces can often be adjusted accordingly in reality. In the presented example, the device provides supports of approximately 24 Newton during the described static work.
For applying the assessments methods, the pervious exoskeleton and a workplace description from [3] were assumed. Results are presented in Table 1.
Furthermore, the stress–strain concept must be considered as well: exoskeletons do not change the strain, but exoskeletons do change the individual’s perceived stress level. The high interest for exoskeletons for industrial applications in recent times supports the theory that there will be an increasing demand for new ergonomic workplace assessment methods [23]. Without a valid assessment approach that considers the advantages and disadvantages equally, there is no objective basis to help determine whether an exoskeleton should be integrated into a production system. Currently, each combination of a workplace and an exoskeleton needs to be analyzed individually to determine the impact on the workflow. This approach is time-consuming, impractical, and therefore highly cost intensive in an industrial environment [26].
5. Production Impacts of Exoskeletons in Manufacturing, Especially “Time Management”
As mentioned in Section 3.3, in [2], there is an intensive analysis of different impacts of the integration of exoskeletons. After identifying and analyszing the impacts, it is obvious that the time impacts are the most important impacts, with the most experience in research. With this hint, a deeper analysis is started for time management with exoskeletons. Time management means a summary of methods to analyze and integrate tasks and devices in the manufacturing process, under consideration of influences with time aspects. Professional measurements of time aspects are called time measurements, and the results of this analysis are referred to in [4].
5.1. Impact from Time-Management Perspective
Feasibility tests with exoskeletons in the automotive industry lead to the idea that time management is affected during work execution. Scientific work proves this assumption as follows: In [24], an increase in task time from 8 to 9 s was observed during ergonomic investigations; [31] even reports an average productivity increase of 40% for painting and 86% in welding operations; and [32] shows a tripling of the holding capacity (from 3.2 to 9.7 min) through the exoskeleton. Productivity in this context means less time for the same task, but the exoskeleton technology is not to be used as a performance-enhancing tool. However, their benefits can be argued based on ergonomic improvements as an additional side effect. In a further investigation of the applicability of passive upper-limb exoskeletons for the automotive industry [33], several experiments proved that the defined “precision index” and quality increased by 16.7%. This has a relevant impact on time management. In most existing studies, the focus is on ergonomic evaluation, while only a few studies are for time-management purposes.
In the context of exoskeletons integrated into workplaces, the difference between diverse types of the time impacts (Figure 6) has to be considered. The three types are (1) setup times, (2) task-execution impacts and (3) process-related impacts. If exoskeletons are mandatory [34] as required manufacturing tools or employed as prevention measures for the execution of processes, the impact regarding the time management has to be considered in the process planning. In the case of optional use of exoskeletons, these factors of impact are important as well. The focus relies mainly on the integration of this technology in serial production. Additional factors like the initial adjustments, training, briefing and maintenance work are not considered.
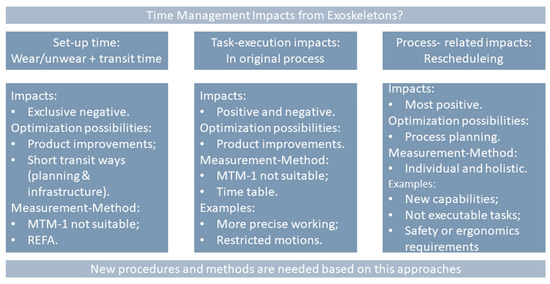
Figure 6.
Three categories of time-management impacts for exoskeleton integration [4].
Setup times for exoskeletons in the workplace, can not be avoided. In this phase, there are considered factors which lead to time loss. Due to this reason, the setup times should be decreased (in the interests of user acceptance as well). Wear/unwear tasks, as well as transit times, are frequent examples. Under some circumstances, it is conceivable to use the exoskeleton just for certain tasks or during certain periods of time and not to wear it during the whole process. This creates the so-called “hybrid assembly processes”, which are a combination of manual and semiautomated work tasks.
Task-execution impacts are time-related changes due to the integration of exoskeletons into the original process. Once they are introduced, the performance of a certain task is then either slower or faster. The main reasons for performance slowdowns are restrictions of motion [35,36]. By using exoskeletons for better precision [33] and high flexibility, faster movements are possible as well.
Process-related impacts are characterized by the fact that these processes are highly influenced by the integration of exoskeletons. These impacts are connected to rescheduling or emerged abilities due to the use of the device and therefore have a positive impact on time management. Additionally, the embedding of support brackets could optimize gripping processes because of shorter distances (up to a third hand). Likewise, new abilities could be made possible through an additional free hand that was used for support which is now provided by the exoskeleton.
5.2. Exoskeleton “Wear/Unwear” Times Experiments and Evaluation
In this paragraph, the “wear/unwear” times for commercial exoskeletons are presented. A method for establishing and evaluating times for all three different types of passive exoskeletons (overhead, bending and sitting support) is developed. Therefore, six different devices of diverse manufacturers were chosen to perform experiments, as follows: (a) 2x overhead exoskeleton: Exo1 and Exo2; (b) 2x bending exoskeleton: Exo3 and Exo4; and (c) 1x sitting exoskeleton: Exo5 in 2 different versions.
Before the kick-off for the experiments, the exoskeleton was adjusted initially to an optimum for each individual worker. This initial adjustment time is not captured and counted, as in serial operation each worker wears his own exoskeleton and therefore the settings were previously personalized.
Methodologically, first of all, the wear/unwear process was captured with a camera device. The goal was to analyze the particular movements and tasks on the basis of MTM-1 (methods-time measurement) and thereby, to achieve a valid assessment of time management. It became apparent that the setup process was too detailed and diverse to be depicted sufficiently by this method. Therefore, the decision to implement an assessment following the REFA (Reichsausschuß für Arbeitszeitermittlung—Reich Committee for Labour Studies) method was made. For the perspective of work-condition regulations, a measurement of the voluntary workers’ performance level is not legitimate. Enough beforehand training confirms this hypothesis of 100% performance level [37].
For this purpose, the test person first picked up the exoskeleton from a tripod. After taking it off the holder, the test person wore the exoskeleton, paused for a short moment in order to signalize the end of the wearing process, subsequently removed the exoskeleton and hung it up properly in its initial tripod. Without another break, once again, a wear/unwear cycle was started. Every exoskeleton was taken thorugh the weared/unweared cycle ten times. The performance of every test person was captured on a video device. A digital signal started and stopped the test. The intermediate results (wearing starts and unwearing starts) were documented on a form. Deviations, for example, resulting from mistakes or twisted straps, were recorded as well. The related table forms, based on validated methods following [38], were used for the measurement process. The respective start of the diverse partial tasks (each wear/unwear) of a whole cycle was documented and enhanced by eventually interfering disturbances of different types. Likewise, the performance level of each partial task was documented at all times (here, 100%, as mentioned before). To simplify the following statistical evaluation, the results were digitalized after 10 cycles of experiments. For evaluation purposes, each time value, ti, between the partial tasks of each cycle was determined separately. Each cycle’s total time was determined through the addition of times within one cycle. The different results are shown in Table 2.
Table 2.
Summary of exoskeletons wear/unwear time measurement [4].
In conclusion, the times for wear/unwear were determined via time observation methods used while performing experiments. Depending on the exoskeleton needed, wear/unwear time is between 20.3 and 87 s.
6. Roadmap for Optimized Integration of Exoskeleton
After the knowledge of exoskeleton technology and specific requirements on workplaces (chapter 3) as well as the holistic impact regarding ergonomic (chapter 4) and for the production system (chapter 5), two blocks from Figure 1 are checked. This section closes the gap between the challenges (chapter 2) and the final effectiveness, by presenting a roadmap for optimized integration of exoskeleton, step by step.
In Figure 7, there are four steps of integration. Because in most of the cases not all new innovation are able to be integrated direcly (process experiment, device maturity, habituation, etc.), we need a step-by-step process of integration, starting with “Step 0” by the current state of the art and ending with by “Step 3” as vision fix star.
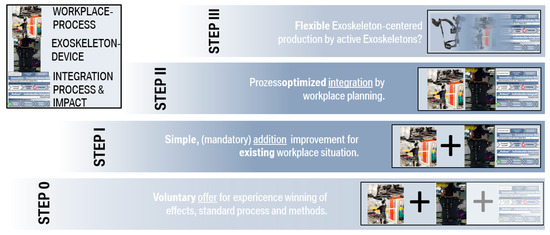
Figure 7.
Step-by-step roadmap for optimized integration of exoskeleton.
This roadmap recommends, at first, in “Step 0”, a voluntary integration so that the user and the company have time to get more and more experience. The workplace is the same as before, but exoskeleton and its impacts, as well as its needed processes, are learnt.
With this knowledge, in “Step 1” the exoskeleton is integrated as an additional optional working tool. In the end of “Step 1” the exoskeleton could be mandatory but is not necessary (in case of problems).
After good experience from previous steps, “Step 2” is the first step in which the exoskeleton is fully integrated, necessary and mandatory for process execution. The process is planned under known consideration of the exoskeleton process and impacts for optimization.
The last step, “Step 3”, is the vision of a fully flexible exoskeleton-centered workplace. All the components (workplace process, exoskeleton device, and integration process and impacts) are merged together.
7. Conclusions
This article present the transformation from the given challenges (industrial and demographic) to an effectiveness production by using exoskeletons for human-centered workplaces as motivation. The challenges—a need of more flexibility and productivity for production systems, but on the other side, demographic change and health issues from a human perspective—are transformed by three identified relevant research questions. The answers are given in the following sections.
The first question, “where and which technology?”, is answered by a methodology, called ExoMatch in chapter 3. A deep analaysis of exoskeleton technology and workplace environments is used to formulate specific matching rules by requirements and exclusions based on the knowledge about characteristics and attributes from database.
The second question, “what kind of benefit?”, is divided in two sections regarding the challenges (for production and human). Section 4 answers the questions about ergonomic benefits and influences. Given research from studies given an ergonomic improvement from round about 20% but as well an increased discomfort of 56%. This article presents exemplary the ergonomic results by applying five industrial state of the assessments cheats for exemplary workplace and exoskeleton as well. The ergonomic risk indicator is changed to an improved workplace situation, but under consideration of the validity. Section 5 answers the benefits and influences of exoskeletons for the production system. This paper asserts that time-related influences are the main relevant impacts. They are divided into three relevant pillars (setup times, task-execution impacts and process-related impacts). With intense study’s by applying the REFA method the result is a wear/unwear time from 20.3 to 52.6 s.
The third question, “when integrate?”, for the final challenge-effectiveness transformation, is answered in Section 6 in the form of a integration roadmap. This roadmap gives an overview and outlook of exoskeleton integration.
The exoskeleton has enormous potential to improve the daily life of workers by decreasing work-related health issues. However, in reality, there are some barriers based on legal issues [39], discomfort/acceptence, direct financial or productivity benefit and, therefore, missing long-term experience. This is the reason for increasing device development and research on this topic. As a result, we see some real-life examples for using exoskeletons in the automotive industry. After the community has enough long-time experience with impacts and processes, and the devices are more smart and comfortable, the next big step could be the usage of active (or semi-acitve) exoskeletons when the benefit is more obviously. A next big challenge is to create a realy noticable businesse case, either by transforming ergonomic benefit in payback costs or by a big improvement in the production system.
Author Contributions
Conceptualization, C.D. and C.C.; Investigation, C.D.; Methodology, C.C.; Writing—original draft, C.D. and C.C.; Writing—review & editing, C.C. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no further external funding. Slight expenditure for research, business trips studies, hardware, etc. are supported from BMW as part of a project for predevelopment, in cooperation with Fraunhofer IAO. The APC of this Journal was funded by Fraunhofer IAO.
Acknowledgments
I would like to express my gratitude to my research supervisors. Thank you to Carmen Lucia Consantinescu for her guidance, enthusiastic encouragement and useful critiques of this research work. I would also like to thank to Claudiu-Alin Rusu, Stefan Giosan and Daniele Ippolito for their advice and assistance in developing the article and, overall, their attitude regarding the work done by our scientific team.
Conflicts of Interest
I declare no conflicts of interest.
References
- Dahmen, C.; Wöllecke, F.; Constantinescu, C. Challenges and Possible Solutions for Enhancing the Workplaces of the Future by Integrating Smart and Adaptive Exoskeletons. In Proceedings of the 11th CIRP Conference on Intelligent Computation in Manufacturing Engineering—CIRP ICME 17, Naples, Italy, 19–21 July 2017. [Google Scholar]
- Dahmen, C.; Hölzel, C.; Wöllecke, F.; Constantinescu, C. Approach of Optimized Planning Process for Exoskeleton Centered Workplace Design. In Proceedings of the 51st CIRP Conference on Manufacturing Systems, Stockholm, Sweden, 16–18 May 2018. [Google Scholar]
- Dahmen, C.; Hefferle, M. Application of Ergonomic Assessment Methods on an Exoskeleton Centered Workplace. In Proceedings of the XXXth Annual Occupational Ergonomics and Safety Conference, Pittsburgh, PA, USA, 7–8 June 2018. [Google Scholar]
- Dahmen, C.; Constantinescu, C. Methodology for Evaluation of the Time-Management impact of Exoskeleton-centred workplaces. Tech. Univ. Cluj Napoca Acta Tech. Napoc. 2018, 55–58. [Google Scholar]
- Marinov, B.; Dao, T. Exoskeleton Report. Available online: http://exoskeletonreport.com/ (accessed on 8 March 2017).
- Bräunig, D.; Kohstall, T. Berechnung des internationalen “Return on Prevention” für Unternehmen—Kosten und Nutzen von Investitionen in den betrieblichen Arbeits- und Gesundheitsschutz. DGUV Rep. 2013, 1, 34–38. [Google Scholar]
- Bungard, S.; Hertle, D.; Kliner, K.; Lüken, F.; Tewes, C.; Trümmer, A. Gesundheit in Bewegung—Gesundheit in Bewegung: Schwerpunkt Muskel- und Skeletterkrankungen. BKK Gesundh. 2013, 1, 16–22. [Google Scholar]
- Bevan, S.; Davies, C. The Impact of Back Pain on Sickness Absence in Europe. Work Found. 2012, 1, 3–4. [Google Scholar]
- Accelopment AG. RoboMate. Available online: http://www.robo-mate.eu/ (accessed on 8 March 2017).
- Constantinescu, C.; Mureșan, P.C.; Gînța, S.M.; Todorovic, O. Modelling and simulation of advanced factory environments integrating intelligent exoskeleton. Int. Conf. Prod. Res. 2014, 3, 109–114. [Google Scholar]
- Constantinescu, C.; Muresan, P.-C.; Simon, G.-M. JackEx: The New Digital Manufacturing Resource for Optimization of Exoskeleton-based Factory Environments. Procedia CIRP 2016, 26, 508–511. [Google Scholar] [CrossRef]
- Chase, B. The LevitateTM Difference—Analysis of the LevitateTM Personal Lift Assist Device (PLAD) During Various Physical Work-Related Tasks. White Pap. 2015, 1, 1–11. [Google Scholar]
- Constantinescu, C.; Popescu, D.; Muresan, P.-C.; Stana, S.-I. Exoskeleton-centered Process Optimization in Advanced Factory Environments. Procedia CIRP 2015, 48, 740–745. [Google Scholar] [CrossRef]
- Constantinescu, C.; Popescu, D.; Muresan, P.; Todorovic, O. Optimisation of advanced manufacturing environments with integrated intelligent Exoskeletons. Int. Conf. Prod. Res. 2016, 4, 1–6. [Google Scholar]
- Weidner, R.; Redlich, T.; Wulfsberg, J.P. Technische Unterstützungssysteme, 1st ed.; Springer: Berlin/Heidelberg, Germany, 2015. [Google Scholar]
- Westkämper, E.; Constantinescu, C.; Lentes, J.; Spath, D. Digitale Produktion, 1st ed.; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Østergaard, E.H. Human-robot collaboration in the age of industry 4.0—How process automation becomes a child’s play for SMEs. Präsentation 2015, 1, 8–32. [Google Scholar]
- VDI Wissensforum. Assistenzroboter in der Produktion 2015—Mensch-Roboter-Kollaboration im Industriealltag—Mensch, Roboter & Sicherheit: Wie Industrieroboter gefahrlos mit dem Menschen kollaborieren. VDI Wissensforum 2015, 2, 1–4. [Google Scholar]
- Deutsche Gesetzliche Unfallversicherung e.V. Fragen und Antworten zum Thema Exoskelette. Available online: http://www.dguv.de/fbhl/sachgebiete/physische-belastungen/faq_exo/index.jsp (accessed on 18 April 2017).
- Becker, T. Prozesse in Produktion und Supply Chain Optimieren, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Levitate Technologies Inc. Levitate Device—Personal-body worn—Performance enhancement. Technol. Overv. 2016, 1, 1–4. [Google Scholar]
- Stadler, K.S.; Elspass, W.J.; van de Venn, H.W. Mobile Service Robotics: CLAWAR 2014—Robo-Mate: Exoskeleton to Enhance Industrial Production, 1st ed.; World Scientific Publishing Co. Pte. Ltd.: Singapore, 2014. [Google Scholar]
- De Looze, M.P.; Bosch, T.; Krause, F.; Stadler, K.S.; O’Sullivan, L.W. Exoskeletons for industrial application and their potential effects on physical work load. Ergonomics 2016, 59, 671–681. [Google Scholar] [CrossRef] [PubMed]
- Sylla, N.; Bonnet, V.; Colledani, F.; Fraisse, P. Ergonomic contribution of ABLE exoskeleton in automotive industry. Int. J. Ind. Ergon. 2014, 44, 475–481. [Google Scholar] [CrossRef]
- Ulrey, B.L.; Fathallah, F.A. Subject-specific, whole-body models of the stooped posture with a personal weight transfer device. J. Electromyogr. Kinesiol. 2013, 23, 206–215. [Google Scholar] [CrossRef]
- Weston, E.B.; Alizadeh, M.; Knapik, G.G.; Wang, X.; Marras, W.S. Biomechanical evaluation of exoskeleton use on loading of the lumbar spine. Appl. Ergon. 2018, 68, 101–108. [Google Scholar] [CrossRef]
- Spada, S.; Ghibaudo, L.; Gilotta, S.; Gastaldi, L.; Cavatorta, M.P. Analysis of Exoskeleton Introduction in Industrial Reality: Main Issues and EAWS Risk Assessment. Adv. Phys. Ergon. Hum. Factors 2017, 1, 236–244. [Google Scholar]
- Rashedi, E.; Kim, S.; Nussbaum, M.A.; Agnew, M.J. Ergonomic evaluation of a wearable assistive device for overhead work. Ergonomics 2014, 57, 1864–1874. [Google Scholar] [CrossRef]
- Peter, F.; Tropschuh, B.H. Taktgeber für Arbeitsplatzergonomie in der Industrie; UmweltDialog—Wirtschaft; Verantwortung; Nachhaltigkeit. 2015. Available online: https://www.umweltdialog.de/de/wirtschaft/arbeitsbedingungen/2018/Taktgeber-fuer-Arbeitsplatzergonomie-in-der-Industrie.php (accessed on 20 January 2020).
- Rosemarie, P. Mit klassischen gesundheitsfördernden Maßnahmen und neuesten Technologien ist das BMW Group Werk Steyr für den demografischen Wandel gerüstet. In Sichere Arbeit: Internationales Fachmagazin für Prävention in der Arbeitswelt; 2017; Available online: http://www.sicherearbeit.at/cms/X04/X04_1.8.6.a/1342585867168/archiv/html-archiv-2017/sichere-arbeit-6-2017/bmw-vorsorge-heute-fuer-morgen (accessed on 20 January 2020).
- Butler, T. Exoskeleton Technology—Making Workers Safer and More Productive. Am. Soc. Saf. Eng. ASSE 2016, 61, 32–36. [Google Scholar]
- Bosch, T.; van Eck, J.; Knitel, K.; Looze, M. The effects of a passive exoskeleton on muscle activity, discomfort and endurance time in forward bending work. Appl. Ergon. 2016, 1, 212–217. [Google Scholar] [CrossRef]
- Spada, S.; Ghibaudo, L.; Gilotta, S.; Gastaldi, L.; Cavatorta, M.P. Investigation into the Applicability of a Passive Upper-limb Exoskeleton in Automotive Industry. Procedia Manuf. 2017, 27, 1255–1262. [Google Scholar] [CrossRef]
- BGHM. Einsatz von passiven Exoskeletten an (gewerblichen) Arbeitsplätzen der Automobilindustrie. In Fach-Information: BGHM FAQ-Liste 05/2017; BGHM: Mainz, Germany, 2017; pp. 1–5. [Google Scholar]
- Abdoli-E, M.; Agnew, M.J.; Stevenson, J.M. An on-body personal lift augmentation device (PLAD) reduces EMG amplitude of erector spinae during lifting tasks. Clin. Biomech. 2006, 5, 456–465. [Google Scholar] [CrossRef] [PubMed]
- Godwin, A.A.; Stevenson, J.M.; Agnew, M.J.; Twiddy, A.L.; Abdoli-Eramaki, M.; Lotz, C.A. Testing the efficacy of an ergonomic lifting aid at diminishing muscular fatigue in women over a prolonged period of lifting. Int. J. Ind. Ergon. 2009, 1, 121–126. [Google Scholar] [CrossRef]
- REFA Bundesverband E.V. Leistungsgradbeurteilung—Lehrunterlage zu Modul 3210248, 1st ed.; REFA: Darmstadt, Germany, 2003. [Google Scholar]
- REFA. Durchführen und Auswerten von Zeitaufnahmen—Lehrunterlage zu Modul 3210251, 1st ed.; REFA-Fachbuchreihe Unternehmensentwicklung: Darmstadt, Germany, 2006. [Google Scholar]
- PR—Prävention Aktuell. Das STOP-PRINZIP. Available online: https://praevention-aktuell.de/das-stop-prinzip/ (accessed on 5 July 2018).
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).