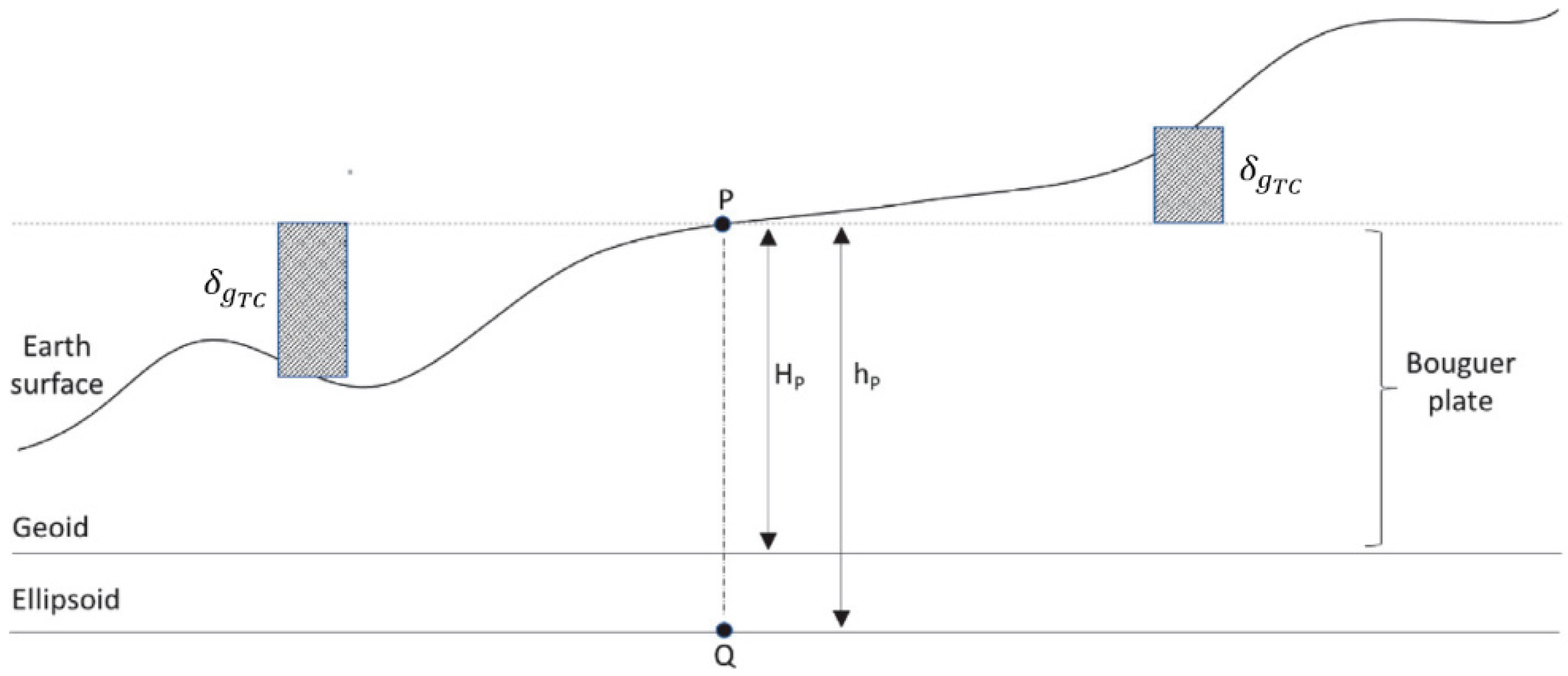
Figure 1.
Illustration of a Bouguer plate having thickness and residual topographical masses that deviate from the plate and are subject to calculating terrain corrections () in the Bouguer reduction.
Figure 1.
Illustration of a Bouguer plate having thickness and residual topographical masses that deviate from the plate and are subject to calculating terrain corrections () in the Bouguer reduction.
Figure 2.
Architecture of the artificial neural network algorithm in MATLAB (w: weights, b: bias).
Figure 2.
Architecture of the artificial neural network algorithm in MATLAB (w: weights, b: bias).
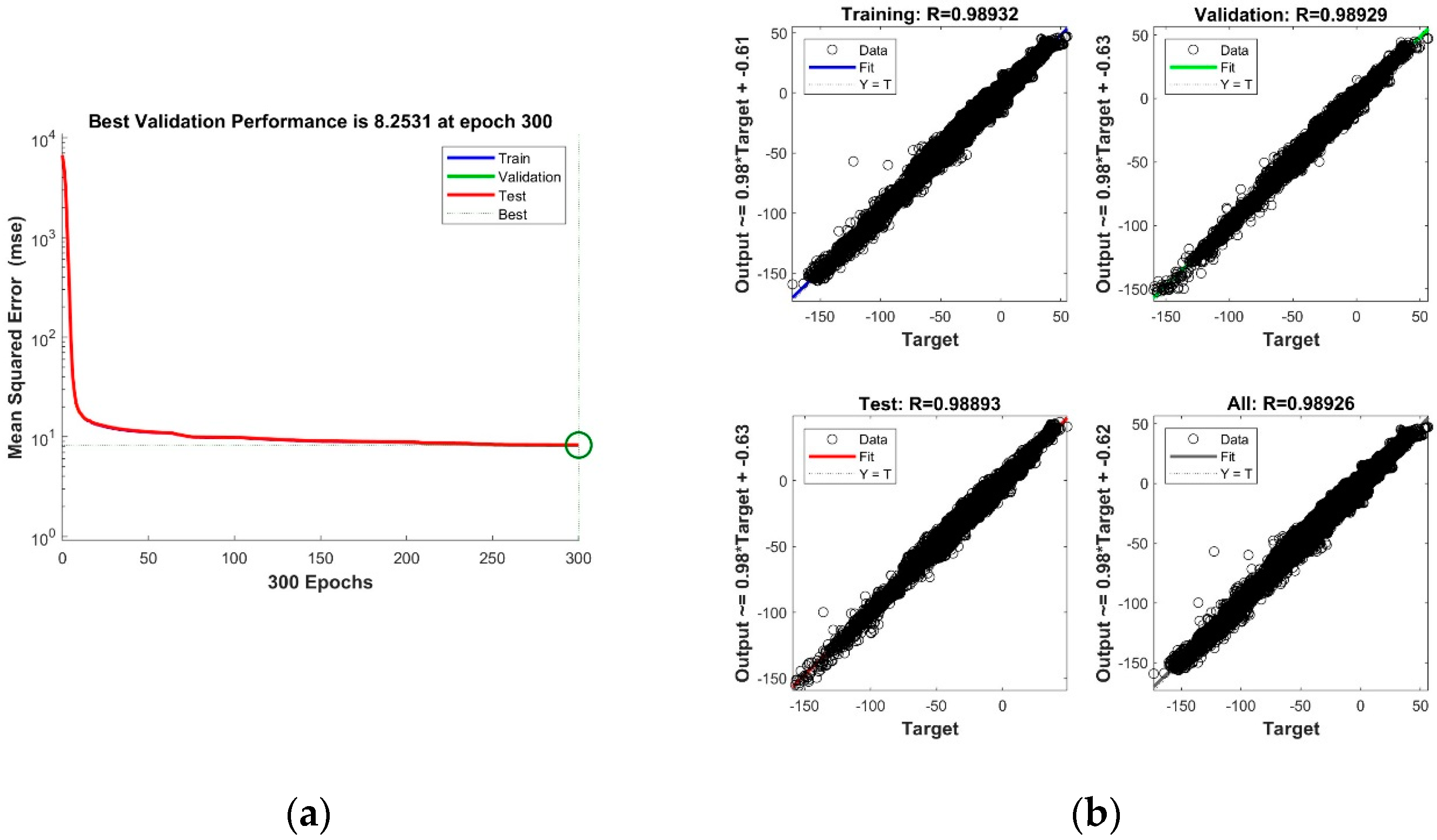
Figure 3.
Neural network training performance (a) and regression (b).
Figure 3.
Neural network training performance (a) and regression (b).
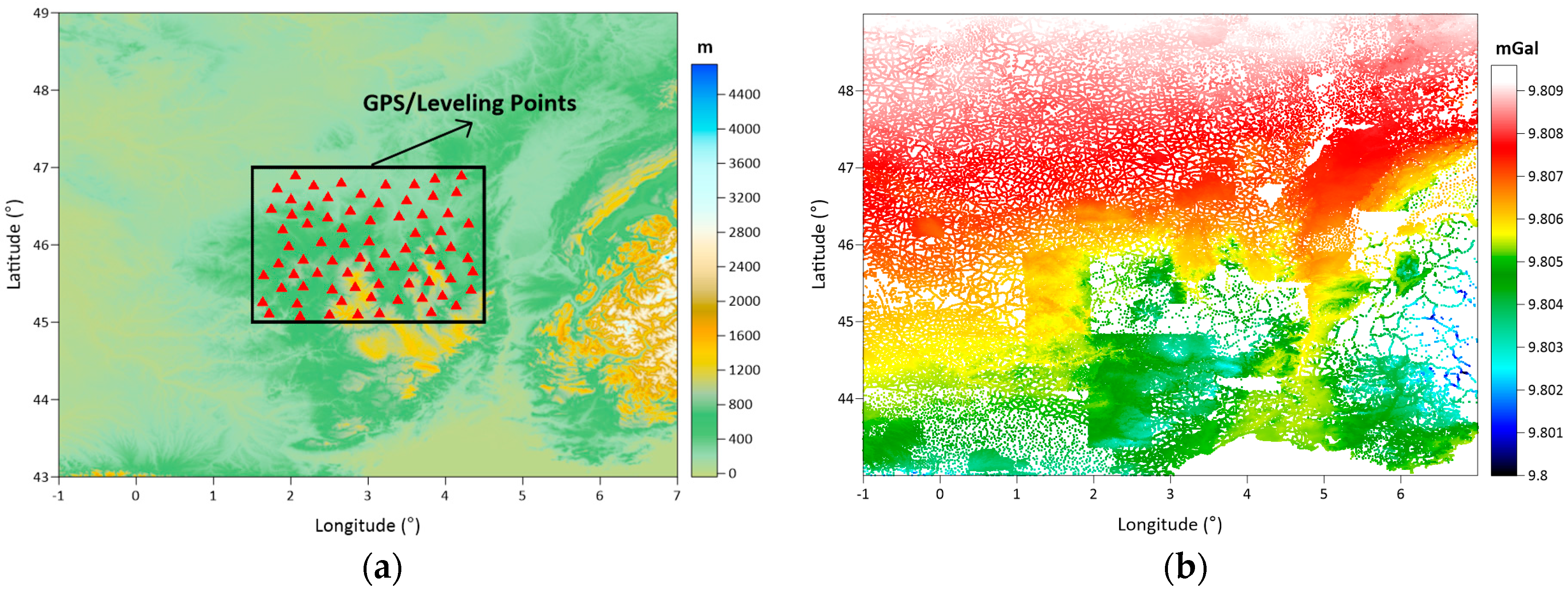
Figure 4.
Topography in the Auvergne test area and distribution of 75 GPS/leveling benchmarks (red triangles) in the area (a) and distribution of the points with gravity observations in the area (b).
Figure 4.
Topography in the Auvergne test area and distribution of 75 GPS/leveling benchmarks (red triangles) in the area (a) and distribution of the points with gravity observations in the area (b).
Figure 5.
Followed data processing steps in numerical tests.
Figure 5.
Followed data processing steps in numerical tests.
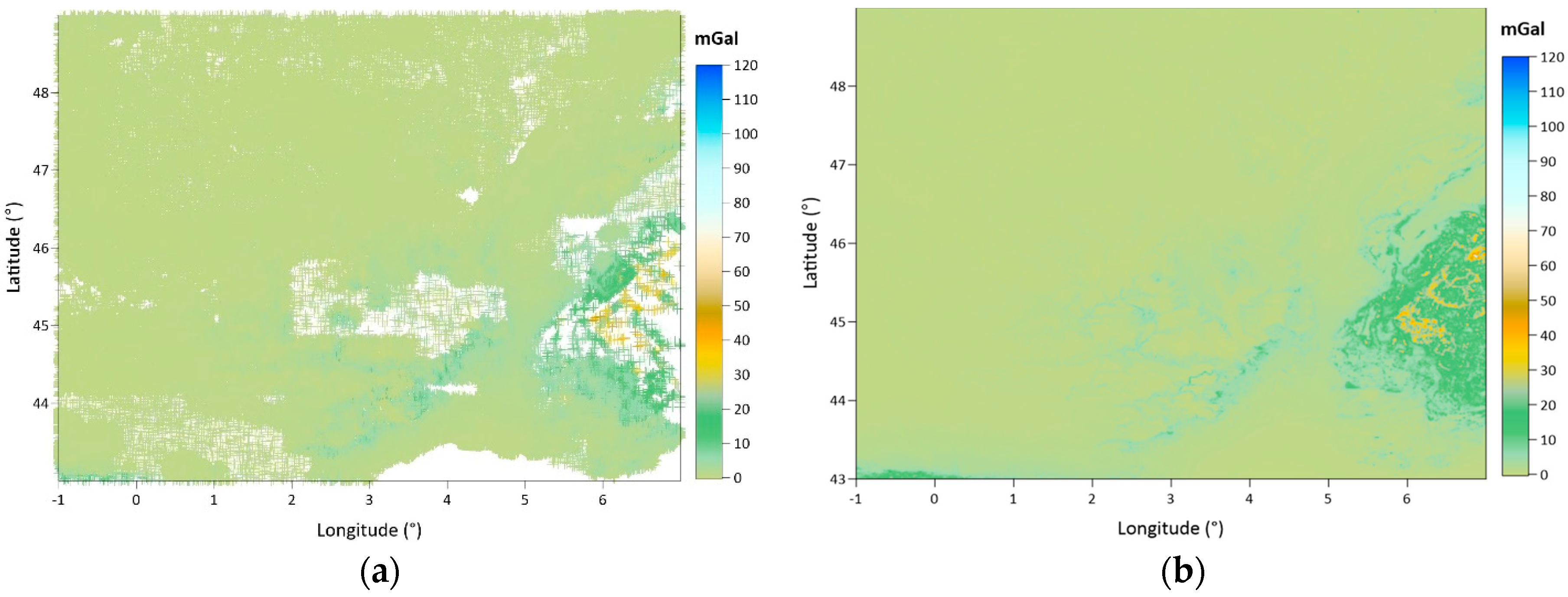
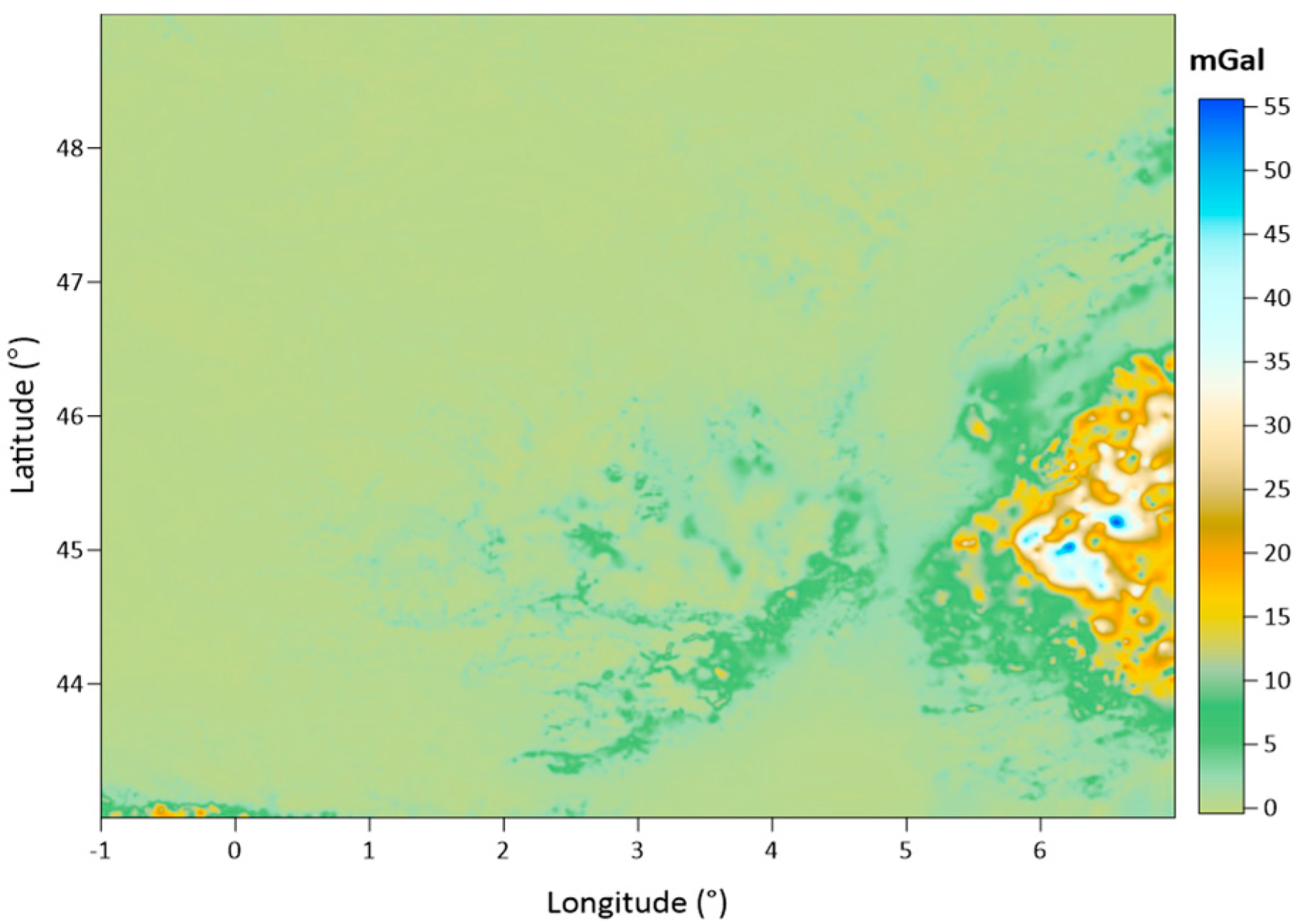
Figure 6.
Terrain corrections at gravity points used for computing the complete Bouguer anomalies before gridding the gravity data (a) and terrain corrections at grid nodes having 1 arcminute grid spacing used to restore free air anomalies from the complete Bouguer anomalies (b).
Figure 6.
Terrain corrections at gravity points used for computing the complete Bouguer anomalies before gridding the gravity data (a) and terrain corrections at grid nodes having 1 arcminute grid spacing used to restore free air anomalies from the complete Bouguer anomalies (b).
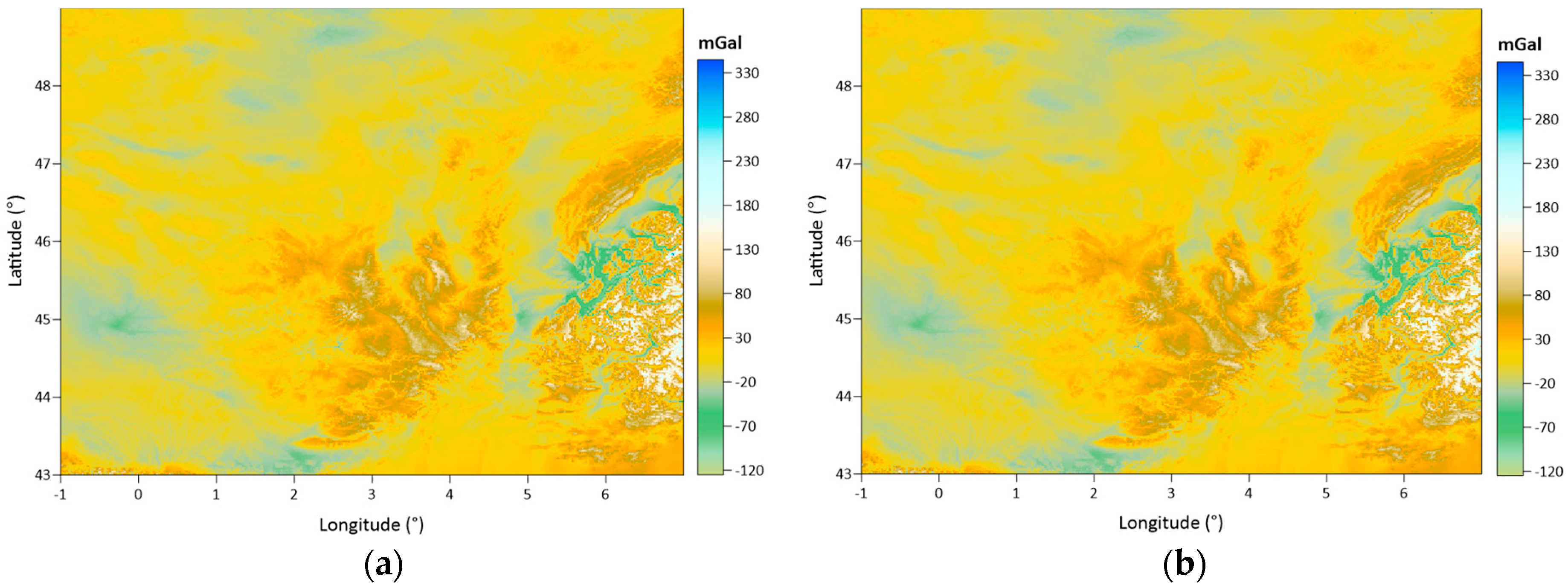
Figure 7.
Simple Bouguer anomalies (SBAs) calculated at gravity points and interpolated at 1 arc-minute spacing grid nodes using Kriging (a). Complete Bouguer anomalies (CBAs) calculated at gravity points and interpolated at 1 arc minute spacing grid nodes using Kriging (b) (unit: mGal).
Figure 7.
Simple Bouguer anomalies (SBAs) calculated at gravity points and interpolated at 1 arc-minute spacing grid nodes using Kriging (a). Complete Bouguer anomalies (CBAs) calculated at gravity points and interpolated at 1 arc minute spacing grid nodes using Kriging (b) (unit: mGal).
Figure 8.
Difference map of the SBAs and CBAs at 1 arc-minute spacing grid nodes (unit: mGal).
Figure 8.
Difference map of the SBAs and CBAs at 1 arc-minute spacing grid nodes (unit: mGal).
Figure 9.
Free air anomalies in grid form with a 1 arc-minute resolution, obtained from: the SBAs in the grids (a) and the CBAs in the grids (b) (unit: mGal).
Figure 9.
Free air anomalies in grid form with a 1 arc-minute resolution, obtained from: the SBAs in the grids (a) and the CBAs in the grids (b) (unit: mGal).
Figure 10.
Difference map of free air anomaly grids produced from the SBAs and CBAs in the grids (unit: mGal).
Figure 10.
Difference map of free air anomaly grids produced from the SBAs and CBAs in the grids (unit: mGal).
Figure 11.
Geoid models in 1 arc-minute grid resolution that are calculated with free air anomalies derived from: the SBAs (a) and the CBAs grids (b) (unit: meter).
Figure 11.
Geoid models in 1 arc-minute grid resolution that are calculated with free air anomalies derived from: the SBAs (a) and the CBAs grids (b) (unit: meter).
Figure 12.
Difference map of geoid models given in
Figure 11a,b (unit: mm).
Figure 12.
Difference map of geoid models given in
Figure 11a,b (unit: mm).
Figure 13.
Complete Bouguer gravity anomalies at gravity points reduced to the geoid surface (before gridding) (a). Map drawn with a 1 arc-minute resolution CBA grid calculated using the Kriging interpolation algorithm (b).
Figure 13.
Complete Bouguer gravity anomalies at gravity points reduced to the geoid surface (before gridding) (a). Map drawn with a 1 arc-minute resolution CBA grid calculated using the Kriging interpolation algorithm (b).
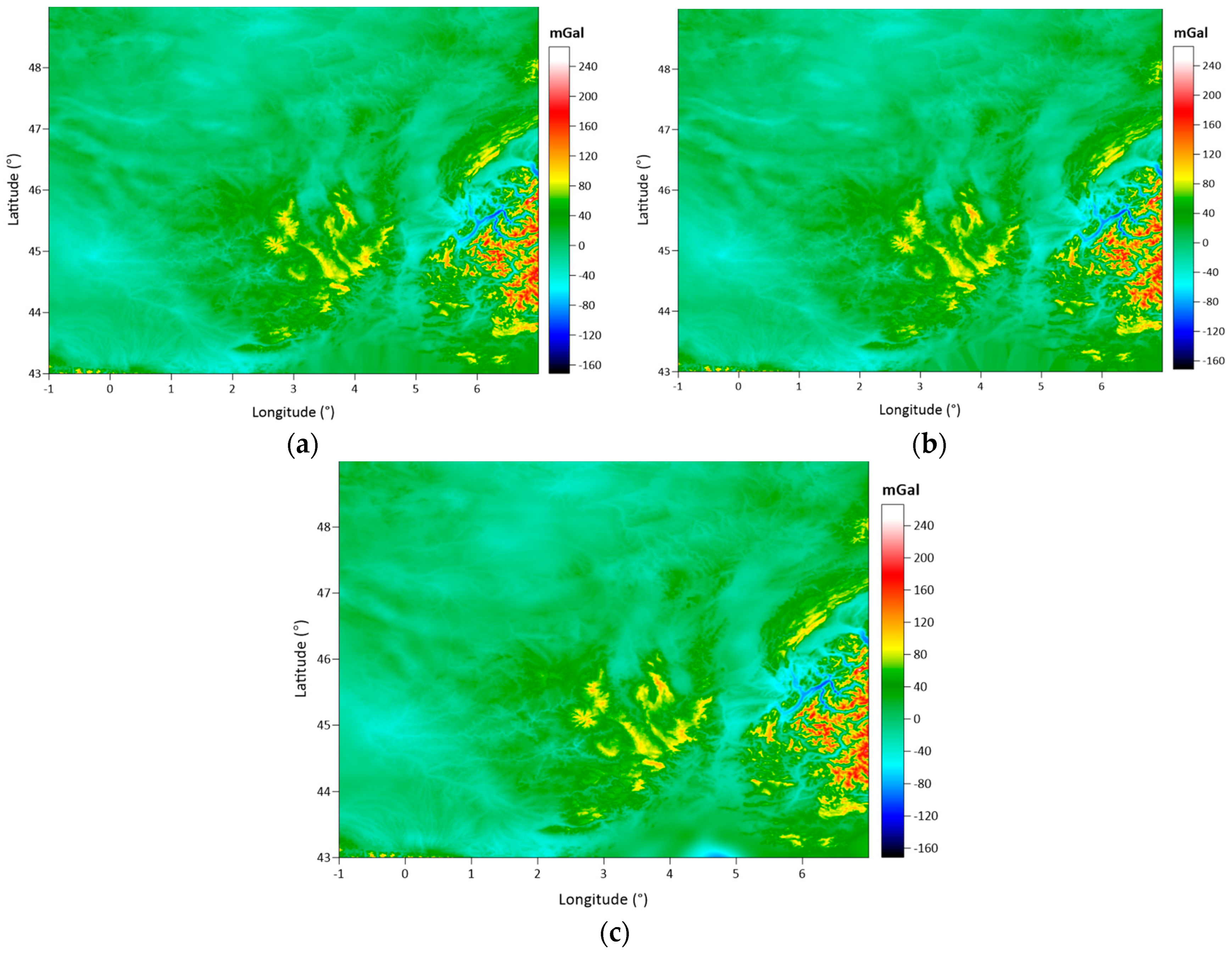
Figure 14.
Bouguer gravity anomaly maps drawn using 1 arc-minute resolution CBA grids calculated using: inverse distance to a power (a), nearest neighbor (b), and artificial neural network (c).
Figure 14.
Bouguer gravity anomaly maps drawn using 1 arc-minute resolution CBA grids calculated using: inverse distance to a power (a), nearest neighbor (b), and artificial neural network (c).
Figure 15.
Difference maps of the Kriging grid compared to: the IDP grid (a), nearest neighbor grid (b), and the ANN grid (c) (complete Bouguer anomaly differences at 1 arc-minute resolution grid nodes).
Figure 15.
Difference maps of the Kriging grid compared to: the IDP grid (a), nearest neighbor grid (b), and the ANN grid (c) (complete Bouguer anomaly differences at 1 arc-minute resolution grid nodes).
Figure 16.
Free air anomalies at gravity points (without any gridding) (a), free air anomaly grid map obtained from Kriging CBAs grid with 1 arc-minute spacing (b).
Figure 16.
Free air anomalies at gravity points (without any gridding) (a), free air anomaly grid map obtained from Kriging CBAs grid with 1 arc-minute spacing (b).
Figure 17.
Free air anomaly grid maps obtained from: the IDP CBAs grid (a), nearest neighbor CBAs grid (b), and the ANN CBAs grid (c) with 1 arc-minute grid spacing.
Figure 17.
Free air anomaly grid maps obtained from: the IDP CBAs grid (a), nearest neighbor CBAs grid (b), and the ANN CBAs grid (c) with 1 arc-minute grid spacing.
Figure 18.
Free air anomaly differences between the Kriging-based grid and the IDP-based grid (a), nearest neighbor-based grid (b), and ANN-based grid (c) using 1 arc-minute grid spacing.
Figure 18.
Free air anomaly differences between the Kriging-based grid and the IDP-based grid (a), nearest neighbor-based grid (b), and ANN-based grid (c) using 1 arc-minute grid spacing.
Figure 19.
Geoid model maps calculated using free air anomaly grids from: Kriging (a), the IDP (b), nearest neighbor (c), and the ANN (d) interpolation methods using 1 arc-minutes spacing.
Figure 19.
Geoid model maps calculated using free air anomaly grids from: Kriging (a), the IDP (b), nearest neighbor (c), and the ANN (d) interpolation methods using 1 arc-minutes spacing.
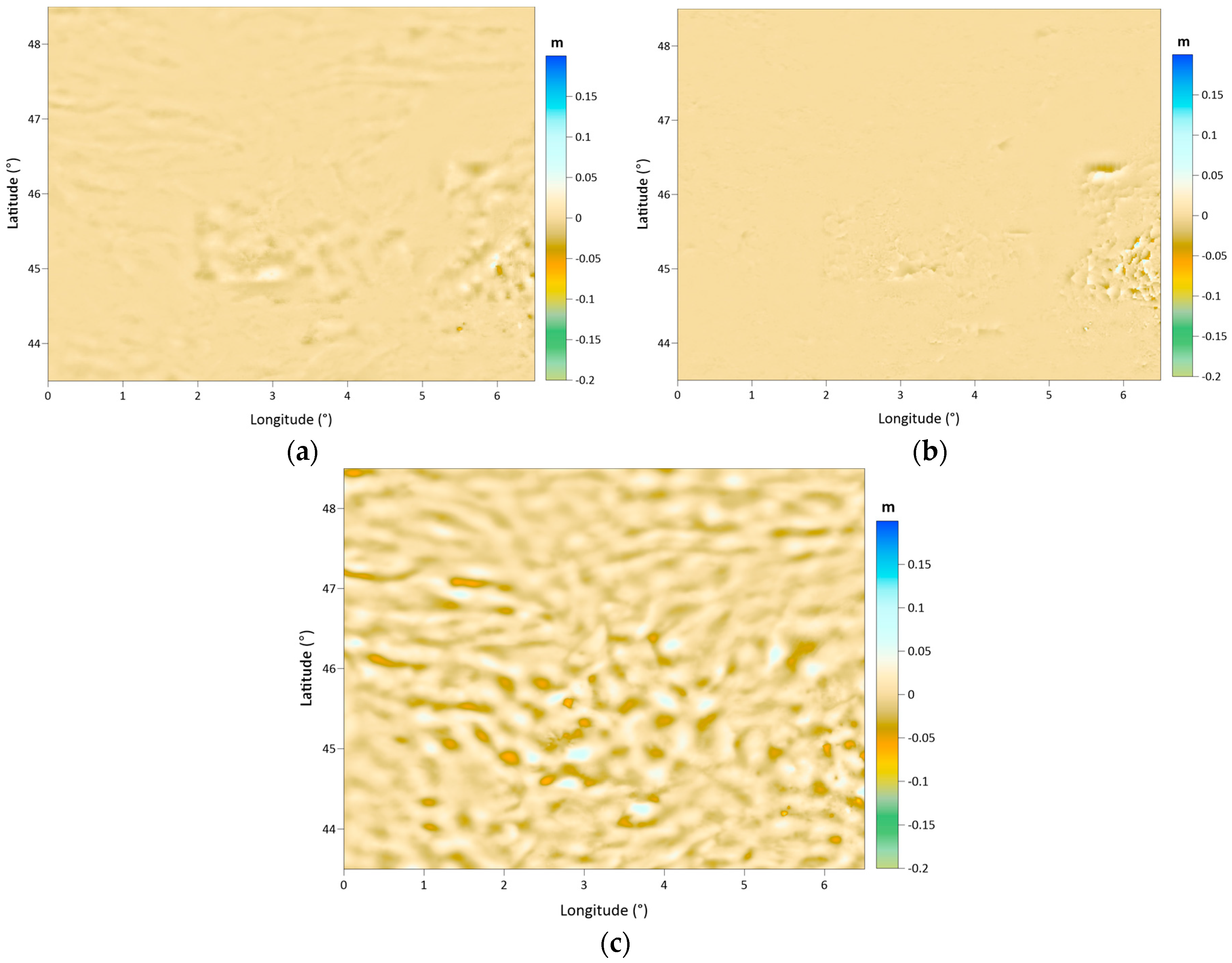
Figure 20.
Geoid height difference maps between the Kriging-based geoid model and: the IDP-based geoid model (a), nearest neighbor-based geoid model (b), and the ANN-based geoid model (c) with 1 arc-minute spacing.
Figure 20.
Geoid height difference maps between the Kriging-based geoid model and: the IDP-based geoid model (a), nearest neighbor-based geoid model (b), and the ANN-based geoid model (c) with 1 arc-minute spacing.
Table 1.
GRS80 (Geodetic Reference System 1980) reference ellipsoid parameters.
Table 1.
GRS80 (Geodetic Reference System 1980) reference ellipsoid parameters.
| Constant Parameters | Definitions | GRS80 |
|---|
| Semi-major axis | 6,378,137.0000 m |
| Semi-minor axis | 6,356,752.3141 m |
| Normal gravity at equator | 9.7803267715 ms−2 |
| Normal gravity at pole | 9.8321863685 ms−2 |
| Geocentric gravitational constant | 3,986,005 × 108 m3 s−2 |
| First eccentricity | 0.00669438002290 |
| () | 0.001931851353 |
| Flattening () | 0.00335281068118 |
Table 2.
Statistics of terrain corrections at the gravity points (point TC) and at the grid nodes (grid TC), and the topographic heights in the area based on the SRTM 3″ DEM data.
Table 2.
Statistics of terrain corrections at the gravity points (point TC) and at the grid nodes (grid TC), and the topographic heights in the area based on the SRTM 3″ DEM data.
| | Max | Min | Mean | Median | Std | RMSE |
|---|
| Point TC (mGal) | 56.533 | −0.317 | 1.043 | 0.476 | 2.153 | 2.392 |
| Grid TC (mGal) | 118.221 | −0.327 | 1.718 | 0.371 | 4.086 | 4.432 |
| 3″ DEM (m) | 4745.649 | −33.506 | 378.900 | 230.454 | 433.149 | 575.485 |
Table 3.
Statistics of the SBAs and CBAs calculated at gravity points and interpolated at 1 arc-minute spacing grid nodes using the Kriging method, and their differences.
Table 3.
Statistics of the SBAs and CBAs calculated at gravity points and interpolated at 1 arc-minute spacing grid nodes using the Kriging method, and their differences.
| Unit: mGal | Max | Min | Mean | Median | Std | RMSE |
|---|
| SBA | 56.373 | −204.830 | −34.170 | −28.652 | 31.640 | 46.569 |
| CBA | 57.271 | −172.656 | −32.238 | −28.097 | 27.905 | 42.638 |
| Difference | 55.590 | −0.439 | 1.932 | 0.396 | 4.879 | 5.247 |
Table 4.
FAA gridding statistics of simple and complete Bouguer anomalies.
Table 4.
FAA gridding statistics of simple and complete Bouguer anomalies.
| Unit: mGal | Max | Min | Mean | Median | Std | RMSE |
|---|
| FAA (via SBAs) | 345.683 | −126.313 | 8.245 | 1.888 | 29.463 | 30.595 |
| FAA (via CBAs) | 258.962 | −129.942 | 8.458 | 1.948 | 29.867 | 31.042 |
| Difference | 37.167 | −86.721 | 0.213 | 0.016 | 2.103 | 2.114 |
Table 5.
Statistics of geoid models calculated using free air anomalies derived from the SBAs and CBAs grid data.
Table 5.
Statistics of geoid models calculated using free air anomalies derived from the SBAs and CBAs grid data.
| Unit: m | Max | Min | Mean | Median | Std | RMSE |
|---|
| SBA based GEOID | 55.743 | 45.268 | 49.616 | 49.567 | 2.021 | 49.657 |
| CBA based GEOID | 55.470 | 45.267 | 49.616 | 49.567 | 2.021 | 49.657 |
| Difference | 0.273 | −0.195 | 0.000 | 0.000 | 0.008 | 0.008 |
Table 6.
Validation statistics of performed geoid via SBA and CBA grids.
Table 6.
Validation statistics of performed geoid via SBA and CBA grids.
| Unit: m | Max | Min | Mean | Median | Std | RMSE |
|---|
| ∆N SBA | 1.161 | 0.973 | 1.059 | 1.064 | 0.041 | 1.060 |
| ∆N CBA | 1.162 | 0.972 | 1.059 | 1.064 | 0.041 | 1.060 |
Table 7.
Standard deviations of the geoid heights differences from the validations of geoid models calculated using varying and computation parameters.
Table 7.
Standard deviations of the geoid heights differences from the validations of geoid models calculated using varying and computation parameters.
| Unit: m | M = 180 | M = 240 | M = 300 | M = 360 | M = 420 | M = 480 | M = 540 | M = 600 | M = 660 | M = 720 | M = 780 |
|---|
| Ψ = 0.10° | 0.261 | 0.109 | 0.096 | 0.083 | 0.078 | 0.076 | 0.076 | 0.076 | 0.076 | 0.076 | 0.075 |
| Ψ = 0.25° | 0.174 | 0.146 | 0.142 | 0.139 | 0.131 | 0.112 | 0.102 | 0.085 | 0.072 | 0.067 | 0.065 |
| Ψ = 0.50° | 0.183 | 0.188 | 0.134 | 0.100 | 0.092 | 0.091 | 0.091 | 0.091 | 0.087 | 0.082 | 0.079 |
| Ψ = 0.75° | 0.197 | 0.142 | 0.117 | 0.107 | 0.121 | 0.115 | 0.110 | 0.106 | 0.109 | 0.111 | 0.112 |
| Ψ = 1.00° | 0.197 | 0.158 | 0.153 | 0.172 | 0.175 | 0.166 | 0.167 | 0.183 | 0.188 | 0.195 | 0.192 |
Table 8.
Standard deviations of the geoid heights differences based on the validations of the geoid models calculated with varying error variance parameters.
Table 8.
Standard deviations of the geoid heights differences based on the validations of the geoid models calculated with varying error variance parameters.
| Unit: m | Max | Min | Mean | Std | RMSE |
|---|
| C = 1 mGal2 | 1.113 | 0.803 | 0.987 | 0.065 | 0.989 |
| C = 4 mGal2 | 1.113 | 0.802 | 0.987 | 0.065 | 0.989 |
| C = 9 mGal2 | 1.113 | 0.801 | 0.986 | 0.066 | 0.989 |
| C = 16 mGal2 | 1.113 | 0.801 | 0.986 | 0.066 | 0.988 |
Table 9.
Standard deviations of the geoid heights differences from the validations of geoid models calculated for different modification choices ().
Table 9.
Standard deviations of the geoid heights differences from the validations of geoid models calculated for different modification choices ().
| Unit: m | Max | Min | Mean | Std | RMSE |
|---|
| biased | 1.162 | 0.972 | 1.059 | 0.041 | 1.060 |
| unbiased | 1.113 | 0.815 | 0.991 | 0.063 | 0.993 |
| optimum | 1.113 | 0.802 | 0.987 | 0.065 | 0.989 |
Table 10.
Grid statistics belonging to the complete Bouguer anomalies (CBAs) based on the used interpolation algorithms.
Table 10.
Grid statistics belonging to the complete Bouguer anomalies (CBAs) based on the used interpolation algorithms.
| Unit: mGal | Max | Min | Mean | Median | Std | RMSE |
|---|
| Kriging | 57.282 | −172.616 | −32.234 | −28.095 | 27.901 | 42.632 |
| IDP | 55.503 | −172.575 | −32.310 | −28.028 | 27.676 | 42.543 |
| Nearest Neighbor | 56.650 | −173.173 | −32.290 | −28.087 | 27.866 | 42.652 |
| ANN | 55.196 | −159.404 | −32.538 | −27.853 | 27.779 | 42.783 |
Table 11.
Statistics of CBA grid differences between the Kriging grid compared to the IDP grid, nearest neighbor grid, and the ANN grid.
Table 11.
Statistics of CBA grid differences between the Kriging grid compared to the IDP grid, nearest neighbor grid, and the ANN grid.
| | Unit: mGal | Max | Min | Mean | Median | Std | RMSE |
|---|
| KRIGING vs. | IDP | 13.646 | −26.880 | 0.076 | 0.009 | 1.314 | 1.316 |
| Nearest Neighbor | 45.066 | −34.711 | 0.056 | 0.006 | 1.618 | 1.619 |
| ANN | 100.999 | −37.245 | 0.304 | 0.082 | 5.310 | 5.318 |
Table 12.
Statistics of free air anomaly grids obtained from Kriging, the IDP, nearest neighbor and the ANN CBAs grids, respectively.
Table 12.
Statistics of free air anomaly grids obtained from Kriging, the IDP, nearest neighbor and the ANN CBAs grids, respectively.
| Unit: mGal | Max | Min | Mean | Std | RMSE |
|---|
| Kriging | 258.962 | −129.942 | 8.458 | 29.867 | 31.042 |
| IDP | 266.128 | −128.788 | 8.382 | 29.822 | 30.978 |
| Nearest Neighbor | 266.037 | −132.073 | 8.402 | 29.884 | 31.042 |
| ANN | 256.155 | −128.766 | 8.154 | 30.018 | 31.106 |
Table 13.
Statistics of free air anomaly differences between the Kriging-based grid and the IDP-based grid, nearest neighbor-based grid, and the ANN based-grid, respectively.
Table 13.
Statistics of free air anomaly differences between the Kriging-based grid and the IDP-based grid, nearest neighbor-based grid, and the ANN based-grid, respectively.
| | Unit: mGal | Max | Min | Mean | Median | Std | RMSE |
|---|
| KRIGING vs. | IDP | 13.646 | −26.880 | 0.076 | 0.009 | 1.314 | 1.316 |
| Nearest neighbor | 45.066 | −34.711 | 0.056 | 0.006 | 1.618 | 1.619 |
| ANN | 100.999 | −37.245 | 0.304 | 0.082 | 5.310 | 5.318 |
Table 14.
Statistics of geoid models calculated using free air anomaly grids from the Kriging, the IDP, nearest neighbor, and ANN interpolation methods.
Table 14.
Statistics of geoid models calculated using free air anomaly grids from the Kriging, the IDP, nearest neighbor, and ANN interpolation methods.
| Unit: m | Max | Min | Mean | Std | RMSE |
|---|
| Kriging | 55.470 | 45.267 | 49.616 | 2.021 | 49.657 |
| IDP | 55.450 | 45.266 | 49.616 | 2.021 | 49.657 |
| Nearest neighbor | 55.462 | 45.267 | 49.616 | 2.021 | 49.657 |
| ANN | 55.451 | 45.264 | 49.616 | 2.021 | 49.657 |
Table 15.
Geoid height difference statistics between the Kriging-based geoid model and the IDP-based, nearest neighbor-based, and ANN-based geoid models.
Table 15.
Geoid height difference statistics between the Kriging-based geoid model and the IDP-based, nearest neighbor-based, and ANN-based geoid models.
| | Unit: cm | Max | Min | Mean | Std | RMSE |
|---|
| KRIGING vs. | IDP | 5.810 | −8.420 | −0.006 | 0.384 | 0.384 |
| Nearest neighbor | 14.240 | −10.050 | −0.001 | 0.408 | 0.408 |
| ANN | 7.830 | −11.940 | −0.001 | 1.580 | 1.580 |
Table 16.
Validation statistics of the performed geoids.
Table 16.
Validation statistics of the performed geoids.
| Unit: m | Max | Min | Mean | Std | RMSE |
|---|
| Kriging | 1.162 | 0.972 | 1.059 | 0.041 | 1.060 |
| IDP | 1.164 | 0.974 | 1.059 | 0.041 | 1.060 |
| Nearest neighbor | 1.163 | 0.972 | 1.059 | 0.041 | 1.059 |
| ANN | 1.165 | 0.967 | 1.060 | 0.045 | 1.061 |






























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}