
Multi-Valve Coordinated Disturbance Rejection Control for an Intake Pressure System Using External Penalty Functions

 , , , ,
, , , ,
Abstract
1. Introduction
- We propose a cooperative optimization algorithm based on penalty functions for pressure control in MVMC systems. The algorithm maintains the simulation deviation at the engine inlet within predefined limits. It also improves the stability of chamber pressure. The convergence of the algorithm is theoretically guaranteed.
- We develop a coordinated ADRC scheme to address the inefficiency of independent control loops, improving control efficiency and robustness. Closed-loop stability is rigorously analyzed.
- We implement a hardware-in-the-loop (HIL) simulation to compare the proposed method with classical PID control, demonstrating its feasibility and superiority.
2. Problem Statement
3. Inlet-Air System Model
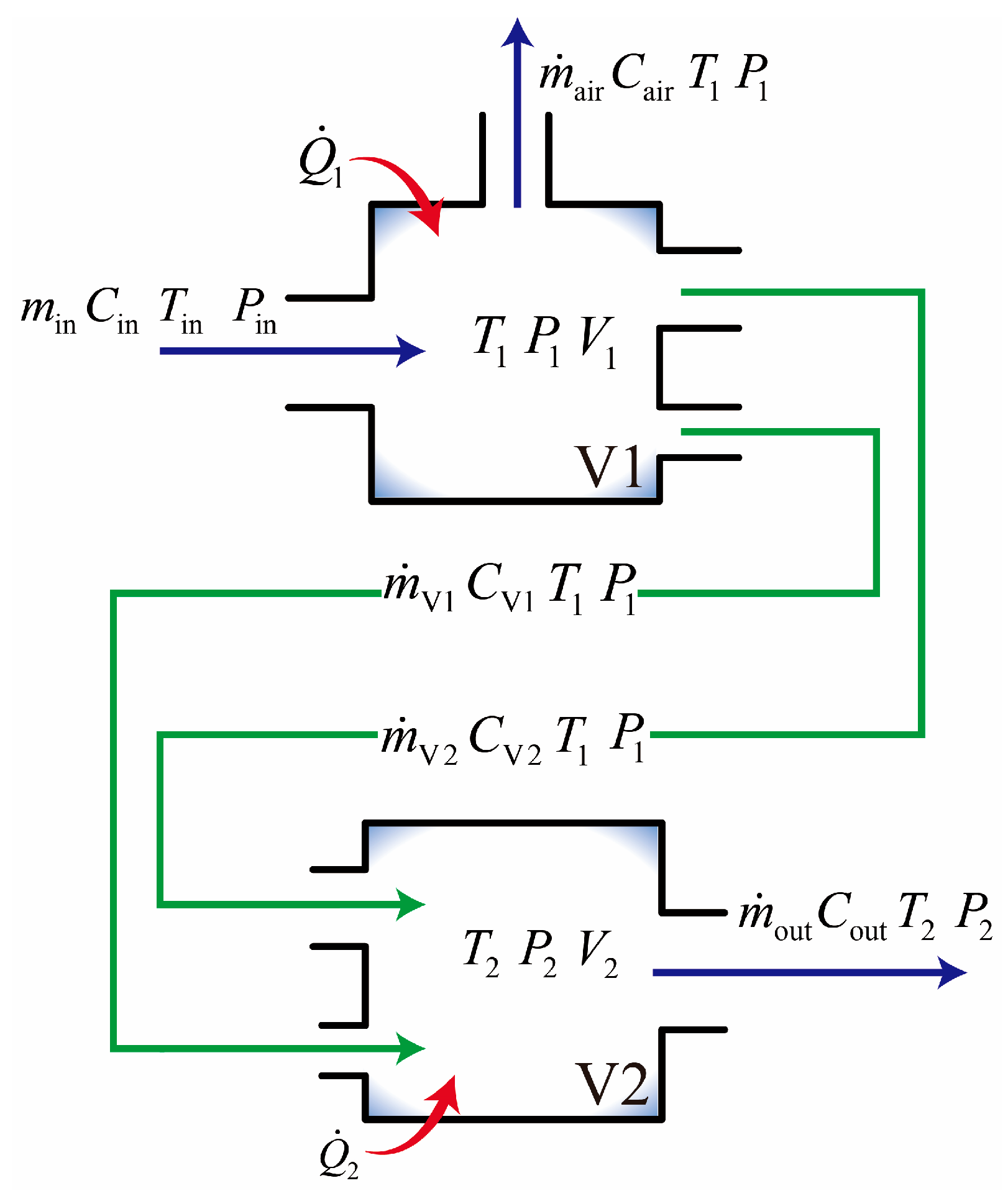
3.1. Chamber Temperature and Pressure Model
3.2. Control Valve Model
3.2.1. Valve Flow Characterization Models
3.2.2. Control Valve Dynamic Characteristic Model
4. Design of Pressure Coordination Control Algorithm Based on Penalty Function
4.1. Description of Optimization Problem
4.2. Construction of Penalty Function
4.3. Design of Coordinated Optimization Control Algorithm
- Step 1: Parameter Initialization
- Step 2: Iterative Process
- Step 3: Termination Condition
4.4. Convergence Analysis
- (1)
- (2) The penalty function is a nonincreasing function of , whereas both and are nondecreasing in .
- (2) According to the properties of , assume . Then we haveAdding these two inequalities yields , which implies that is nonincreasing in . □
- (a) Boundedness of the penalty term
- LetBy Lemma 1,Since is nonincreasing in , it follows thatThus, remains bounded as grows.
- (b) Feasibility of the limit point
- As , both and . For any convergent subsequence , Lemma 1 givesLet be its limit of , thenSincesatisfies all original constraints of Problem (7).
- (c) Convergence of the augmented objective
- Again according to Lemma 1, is an optimal solution and
- As ,Therefore,□
5. Design of Cooperative Controller
5.1. Pressure Control Model of Dual-Chamber System
5.2. Design of Coordinated ADRC Controller
5.2.1. Design of ADRC
5.2.2. Design of Penalty-Function Based Coordinated ADRC
5.3. Stability Analysis
6. Numerical Simulation and Validation
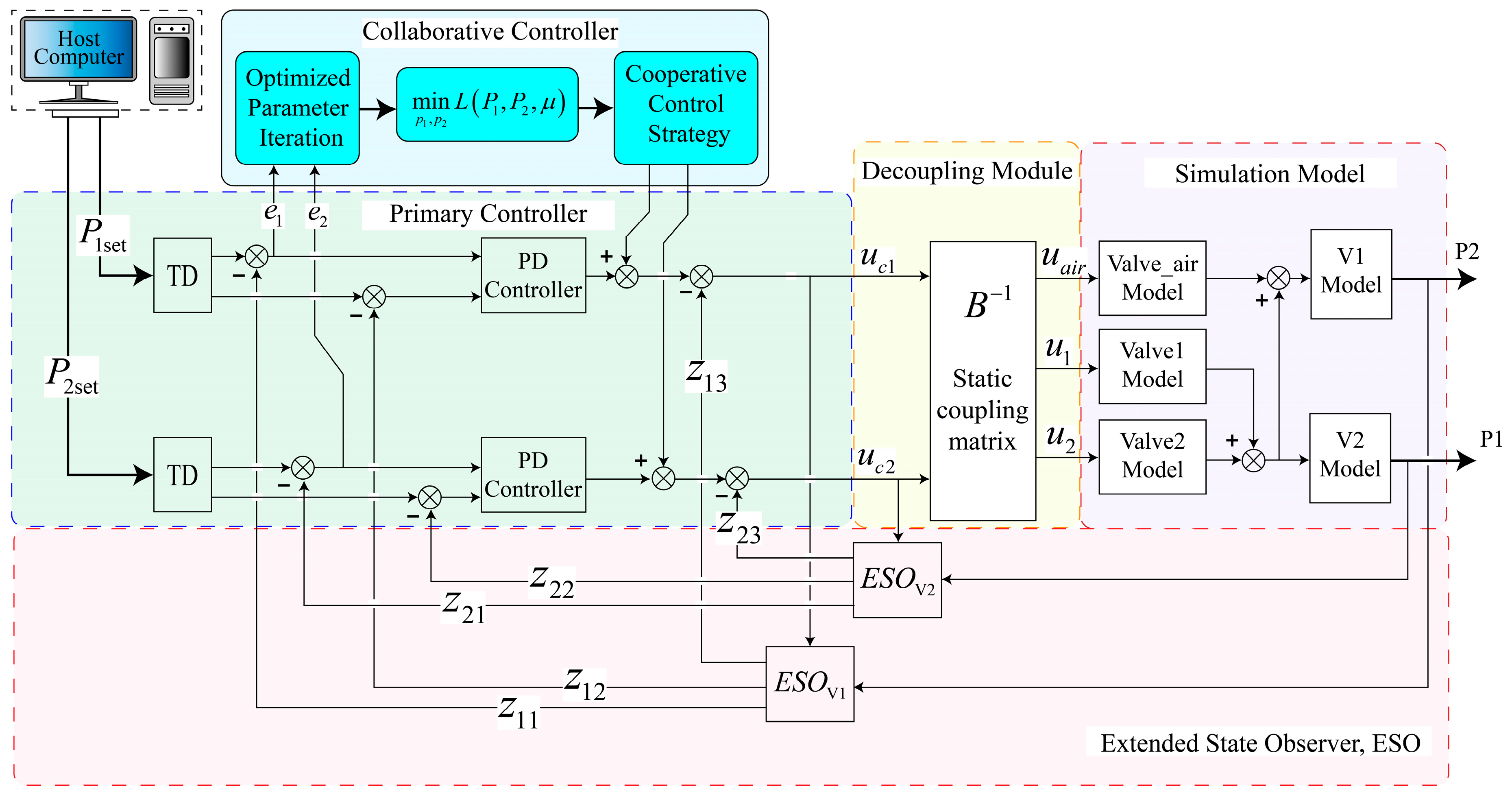
6.1. Simulation Verification Platform Setup
6.2. Simulation Testing and Validation
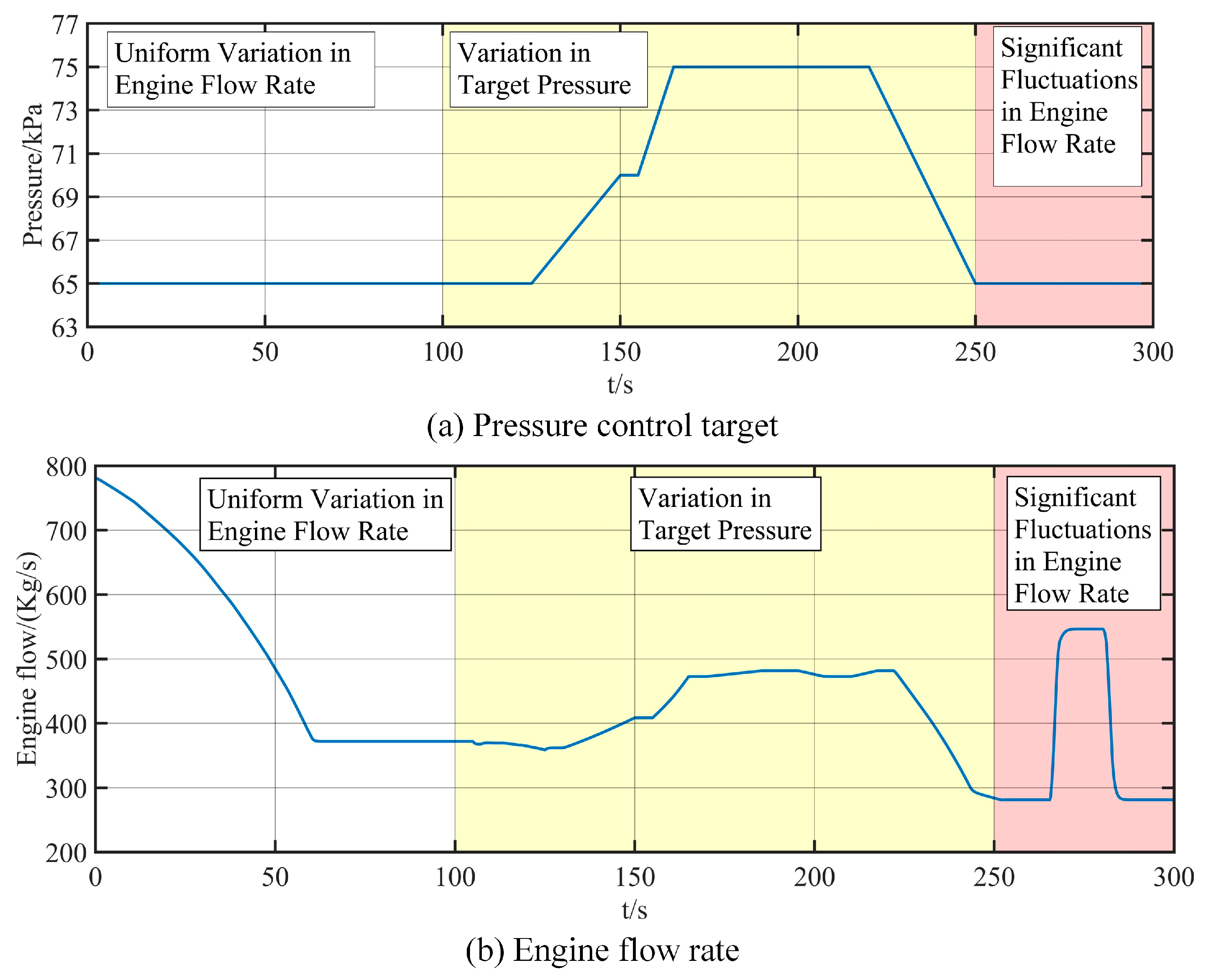
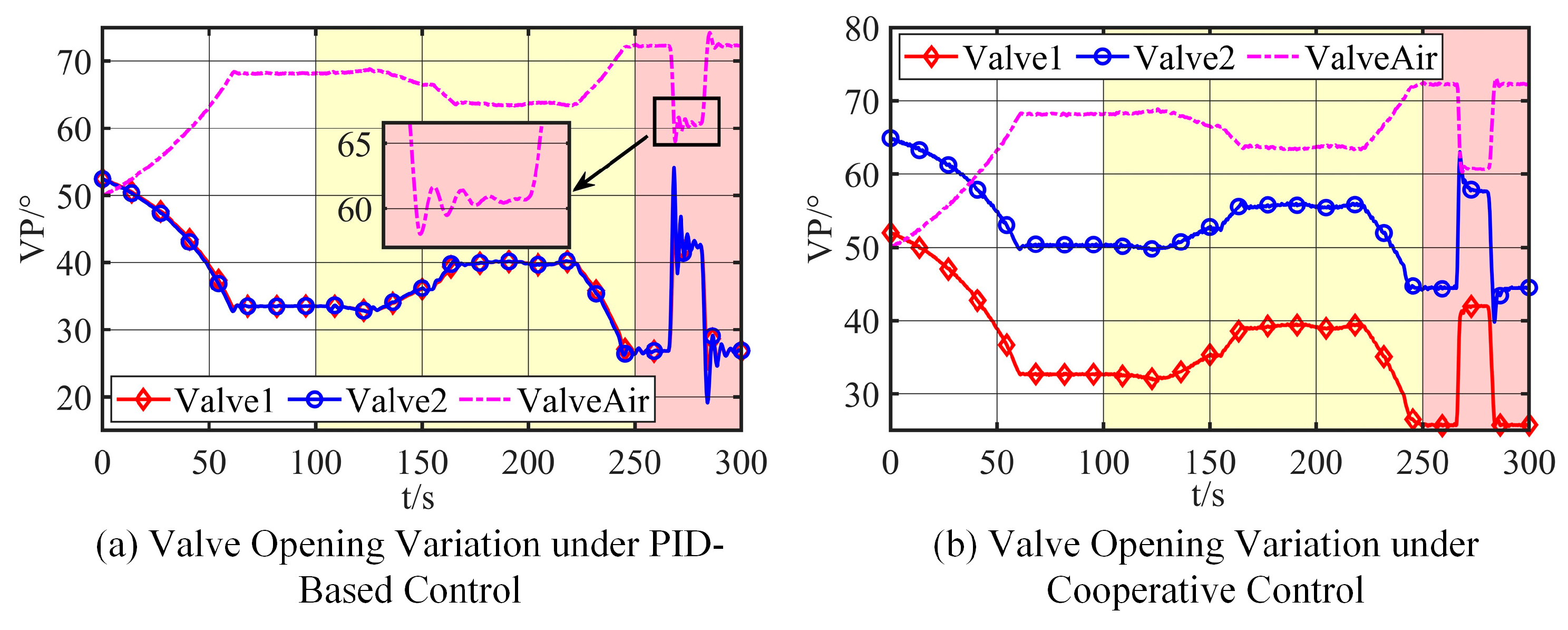
- 0–100 s (Uniform Flow Variation): Engine flow decreases smoothly from 780 kg/s to 370 kg/s over the first 60 s, then remains constant until 100 s. During this phase, V2’s setpoint is maintained at 65 kPa. This phase is designed to evaluate the pressure-holding capability of the control system under a prolonged and wide-range variation in engine flow.
- 100–250 s (Pressure Tracking): V2’s setpoint ramps from 65 kPa to 70 kPa at 125–150 s, holds until 155 s, then ramps to 75 kPa at 155–165 s and holds until 220 s; finally, it returns to 65 kPa at 220–250 s. Engine flow varies according to the engine mode [27]. This phase aims to assess the tracking performance of the controller in following dynamic pressure setpoints within a high-flow intake chamber.
- 250–300 s (Disturbance Rejection): Engine flow jumps from 280 kg/s to 550 kg/s over 265–270 s, then back to 280 kg/s over 280–285 s, with a peak rate of change of 80 kg/s2. V2’s setpoint remains at 65 kPa. This phase is intended to test the disturbance rejection capability of the control system under abrupt and large-scale fluctuations in engine flow.
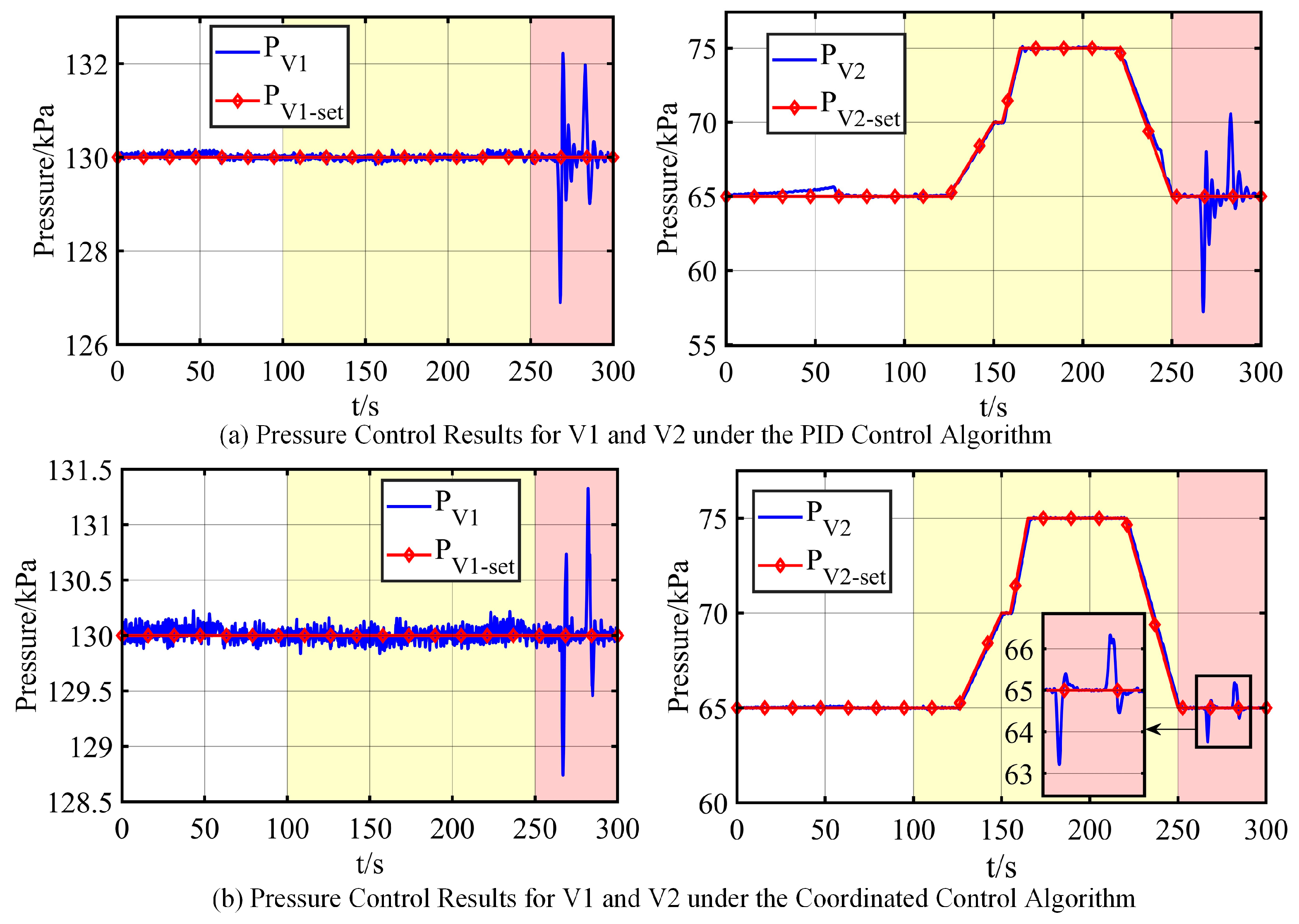
- Average accuracy. Compared with PID, the ADRC reduces RMSE by 56% in V1 (0.278 → 0.123 kPa) and by 70% in V2 (0.736 to 0.218 kPa).
- Cumulative deviation. The integral of absolute error (IAE) falls from 27.259 to 18.051 (−33%) in V1 and from 83.159 to 33.175 (−60%) in V2, indicating that the coordinated strategy spends far less time operating with large errors.
- Worst-case behavior. MaxAE is reduced by a factor of 2.3 in V1 and 4.3 in V2, further demonstrating the superior robustness of the proposed coordinated ADRC under severe disturbances.
7. Conclusions
- (1)
- Pressure-Error Constraint via External Penalty
- (2)
- Multi-Valve Coordinated ADRC
- (3)
- HIL Simulation Results
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| ADRC | Active disturbance rejection control |
| PID | Proportional–integral–derivative |
| LMIs | Linear matrix inequalities |
| ASMC | Adaptive sliding-mode control |
| DOB | Disturbance observer |
| MIMO | Multi-input multi-output |
| SISO | Single-input single-output |
| UAV | Unmanned aerial vehicle |
| MCMV | Multi-chamber, multi-valve |
| HIL | Hardware-in-the-loop |
| ESO | Extended state observer |
| TD | Tracking differentiator |
| PLC | Programmable logic controller |
| PC | Personal computer |
| RMSE | Root mean square error |
| IAE | Integral of absolute error |
| MaxAE | Maximum absolute error |
References
- Zhou, Q.; Guo, Y.; Zhao, W.; Xu, K.; Wang, K.; Wu, Z.; Sun, H. Research on fault diagnosis technology of simulated altitude test facility based on multi-optimization strategy, real-time data transfer, and the MH attention-RF algorithm. Multimed. Tools Appl. 2024, 83, 28729–28760. [Google Scholar] [CrossRef]
- Zhu, M.; Wang, X. An integral type μ synthesis method for temperature and pressure control of flight environment simulation volume. In Turbo Expo: Power for Land, Sea, and Air; American Society of Mechanical Engineers: New York, NY, USA, 2017; V006T05A006. [Google Scholar]
- Davis, M.; Montgomery, P. A flight simulation vision for aeropropulsion altitude ground test facilities. J. Eng. Gas Turbines Power 2005, 127, 8–17. [Google Scholar] [CrossRef]
- Li, C.; Zhang, H.; Xiao, G.; Zhai, C.; Dan, Z.; Wang, X. An efficient tracking differentiator based active disturbance rejection control for flight environment simulation system. Aerosp. Sci. Technol. 2024, 155, 109578. [Google Scholar] [CrossRef]
- Xu, Z.; Zhang, H.; Zhai, C.; Xiao, G.; Qian, Q.; Huang, F. Active Disturbance Rejection Intake Pressure Control of Aeropropulsion Systems Test Facility with Adaptive Parameter b0. Aerosp. Sci. Technol. 2025, 163, 110289. [Google Scholar] [CrossRef]
- Liu, J.; Wang, X.; Liu, X.; Zhu, M.; Pei, X.; Dan, Z. μ-Synthesis control with reference model for aeropropulsion system test facility under dynamic coupling and uncertainty. Chin. J. Aeronaut. 2023, 36, 246–261. [Google Scholar] [CrossRef]
- Walker, S.; Tang, M.; Mamplata, C. TBCC propulsion for a Mach 6 hypersonic airplane. In Proceedings of the 16th AIAA/DLR/DGLR International Space Planes and Hypersonic Systems and Technologies Conference, Bremen, Germany, 19–22 October 2009; p. 7238. [Google Scholar]
- Pei, X.; Wang, X.; Liu, J.; Zhu, M.; Dan, Z.; He, A.; Miao, K.; Zhang, L.; Xu, Z. A review of modeling, simulation, and control technologies of altitude ground test facilities for control application. Chin. J. Aeronaut. 2023, 36, 38–62. [Google Scholar] [CrossRef]
- Liu, J.; He, A.; Pei, X.; Long, Y. Feedforward compensation-based L1 adaptive control for aeropropulsion system test facility and hardware-in-the-loop verification. Chin. J. Aeronaut. 2025, 38, 103386. [Google Scholar] [CrossRef]
- Miao, K.; Wang, X.; Zhu, M.; Zhang, S.; Dan, Z.; Liu, J.; Yang, S.; Pei, X.; Wang, X.; Zhang, L. A multi-cavity iterative modeling method for the exhaust systems of altitude ground test facilities. Symmetry 2022, 14, 1399. [Google Scholar] [CrossRef]
- Liu, J.S.; Wang, X.; Zhu, M.Y.; Yang, S.; Pei, X.; Miao, K.; Zhang, S.; Dan, Z. Precise pressure control of constant pressure chamber based on control allocation. J. Propuls. Technol. 2022, 43, 383–391. (In Chinese) [Google Scholar]
- Liu, J.S.; Yang, S.B.; Wang, X.; Zhu, M.; Pei, X.; Dan, Z.; Miao, K.; Zhang, S. Open loop–closed loop compound control method for pressure stabilizing chamber based on double-valve control. J. Propuls. Technol. 2022, 43, 339–346. (In Chinese) [Google Scholar]
- Gao, Y.; Xu, R.; Wang, Y.; Tian, D. Multi-actuator control with modal switching and different disturbance for scanning imaging motion compensation. IET Control Theory Appl. 2021, 15, 1931–1941. [Google Scholar] [CrossRef]
- Hu, S.; Kang, H.; Tang, H.; Cui, Z.; Liu, Z.; Ouyang, P. Trajectory optimization algorithm for a 4-DoF redundant parallel robot based on 12-phase sine jerk motion profile. Actuators 2021, 10, 80. [Google Scholar] [CrossRef]
- Jayswal, A.; Arana-Jiménez, M. Robust penalty function method for an uncertain multi-time control optimization problems. J. Math. Anal. Appl. 2022, 505, 125453. [Google Scholar] [CrossRef]
- Zheng, L.; Liu, W.; Zhai, C. A dynamic lane-changing trajectory planning algorithm for intelligent connected vehicles based on modified driving risk field model. Actuators 2024, 13, 380. [Google Scholar] [CrossRef]
- Xiong, S.; Liu, H.H.-T. Low-altitude fixed-wing robust and optimal control using a barrier penalty function method. J. Guid. Control. Dyn. 2023, 46, 2218–2223. [Google Scholar] [CrossRef]
- Espinosa Barcenas, O.U.; Quijada Pioquinto, J.G.; Kurkina, E.; Lukyanov, O. Multidisciplinary analysis and optimization method for conceptually designing of electric flying-wing unmanned aerial vehicles. Drones 2022, 6, 307. [Google Scholar] [CrossRef]
- Wu, C.; Fang, H.; Yang, Q.; Zeng, X.; Wei, Y.; Chen, J. Distributed cooperative control of redundant mobile manipulators with safety constraints. IEEE Trans. Cybern. 2021, 53, 1195–1207. [Google Scholar] [CrossRef]
- Mirzaei, A.; Ramezani, A. Distributed model predictive control for nonlinear large-scale systems based on reduced-order cooperative optimisation. Int. J. Syst. Sci. 2021, 52, 2427–2445. [Google Scholar] [CrossRef]
- Tang, Y.; Ren, Z.; Li, N. Zeroth-order feedback optimization for cooperative multi-agent systems. Automatica 2023, 148, 110741. [Google Scholar] [CrossRef]
- Han, J. From PID to active disturbance rejection control. IEEE Trans. Ind. Electron. 2009, 56, 900–906. [Google Scholar] [CrossRef]
- Bandyopadhyay, S.; Qin, Z.; Bauer, P. Decoupling control of multiactive bridge converters using linear active disturbance rejection. IEEE Trans. Ind. Electron. 2020, 68, 10688–10698. [Google Scholar] [CrossRef]
- Gao, Z. On the centrality of disturbance rejection in automatic control. ISA Trans. 2014, 53, 850–857. [Google Scholar] [CrossRef] [PubMed]
- Wei, Q.; Wu, Z.; Zhou, Y.; Ke, D.; Zhang, D. Active disturbance-rejection controller (ADRC)-based torque control for a pneumatic rotary actuator with positional interference. Actuators 2024, 13, 66. [Google Scholar] [CrossRef]
- Zhang, L.; Zhang, H.; Zhai, C.; Wang, X.; Dan, Z. A new time optimal control based tracking differentiator with small phase lag. In Proceedings of the 2024 43rd Chinese Control Conference (CCC), Kunming, China, 28–31 July 2024; IEEE: Piscataway, NJ, USA, 2024; pp. 908–912. [Google Scholar]
- Long, Y.; Yang, S.; Wang, X.; Jiang, Z.; Liu, J.; Zhao, W.; Zhu, M.; Chen, H.; Miao, K.; Zhang, Y. MoHydroLib: An HMU Library for Gas Turbine Control System with Modelica. Symmetry 2022, 14, 851. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| 0.5 | 0.001 | ||
| 0.01 | 0.2 | ||
| 2 | 5 | ||
| 0.001 | 0.0001 | ||
| 0.1 | 0.03 | ||
| 0.03 | 1 |
| KP | KI | KD | |
|---|---|---|---|
| Valve 1 | 0.005 | 0.005 | 0.002 |
| Valve 2 | 0.005 | 0.005 | 0.002 |
| Valve_air | 0.003 | 0.003 | 0.001 |
| RSME V1 | RSME V2 | IAE V1 | IAE V2 | MaxAE V1 | MaxAE V2 | |
|---|---|---|---|---|---|---|
| Coordinated ADRC | 0.123 kPa | 0.218 kPa | 18.051 kPa·s | 33.175 kPa·s | 1.327 kpa | 1.782 kPa |
| PID | 0.278 kPa | 0.736 kPa | 27.259 kPa·s | 83.159 kPa·s | 3.107 kPa | 7.793 kPa |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, L.; Shi, D.; Zhai, C.; Dan, Z.; Zhang, H.; Wang, X.; Xiao, G. Multi-Valve Coordinated Disturbance Rejection Control for an Intake Pressure System Using External Penalty Functions. Actuators 2025, 14, 334. https://doi.org/10.3390/act14070334
Zhang L, Shi D, Zhai C, Dan Z, Zhang H, Wang X, Xiao G. Multi-Valve Coordinated Disturbance Rejection Control for an Intake Pressure System Using External Penalty Functions. Actuators. 2025; 14(7):334. https://doi.org/10.3390/act14070334
Chicago/Turabian StyleZhang, Louyue, Duoqi Shi, Chao Zhai, Zhihong Dan, Hehong Zhang, Xi Wang, and Gaoxi Xiao. 2025. "Multi-Valve Coordinated Disturbance Rejection Control for an Intake Pressure System Using External Penalty Functions" Actuators 14, no. 7: 334. https://doi.org/10.3390/act14070334
APA StyleZhang, L., Shi, D., Zhai, C., Dan, Z., Zhang, H., Wang, X., & Xiao, G. (2025). Multi-Valve Coordinated Disturbance Rejection Control for an Intake Pressure System Using External Penalty Functions. Actuators, 14(7), 334. https://doi.org/10.3390/act14070334