

Robust Time-Optimal Kinematic Control of Robotic Manipulators Based on Recurrent Neural Network Against Harmonic Noises



Abstract
1. Introduction
2. Problem Formulation and Method
2.1. Preliminary
2.2. Time-Optimal Kinematic Controller Without Perturbed Noise
2.3. Time-Optimal Kinematic Controller Under Harmonic Noise
| Algorithm 1 The Dynamic RNN Framework to Implement the Time-Optimal Kinematic Controller Under Harmonic Noise |
| Require: Input: desired path , Jacobian matrix J, the maximum allocated time , noise frequency , noise amplitude , noise phase Ensure: Output: resolved joint angle and joint velocity Initialize hidden state , , for to do if then Update the state variables of (10) {Dynamics updating via ODE-sovler (10)} else Break {Early termination for overtime operations} end if Obtain joint angle {Return time series} end for return the acutual path {Return time series} |
3. Simulation and Experiment Results
3.1. Simulation Verification
3.1.1. Simulation Setup
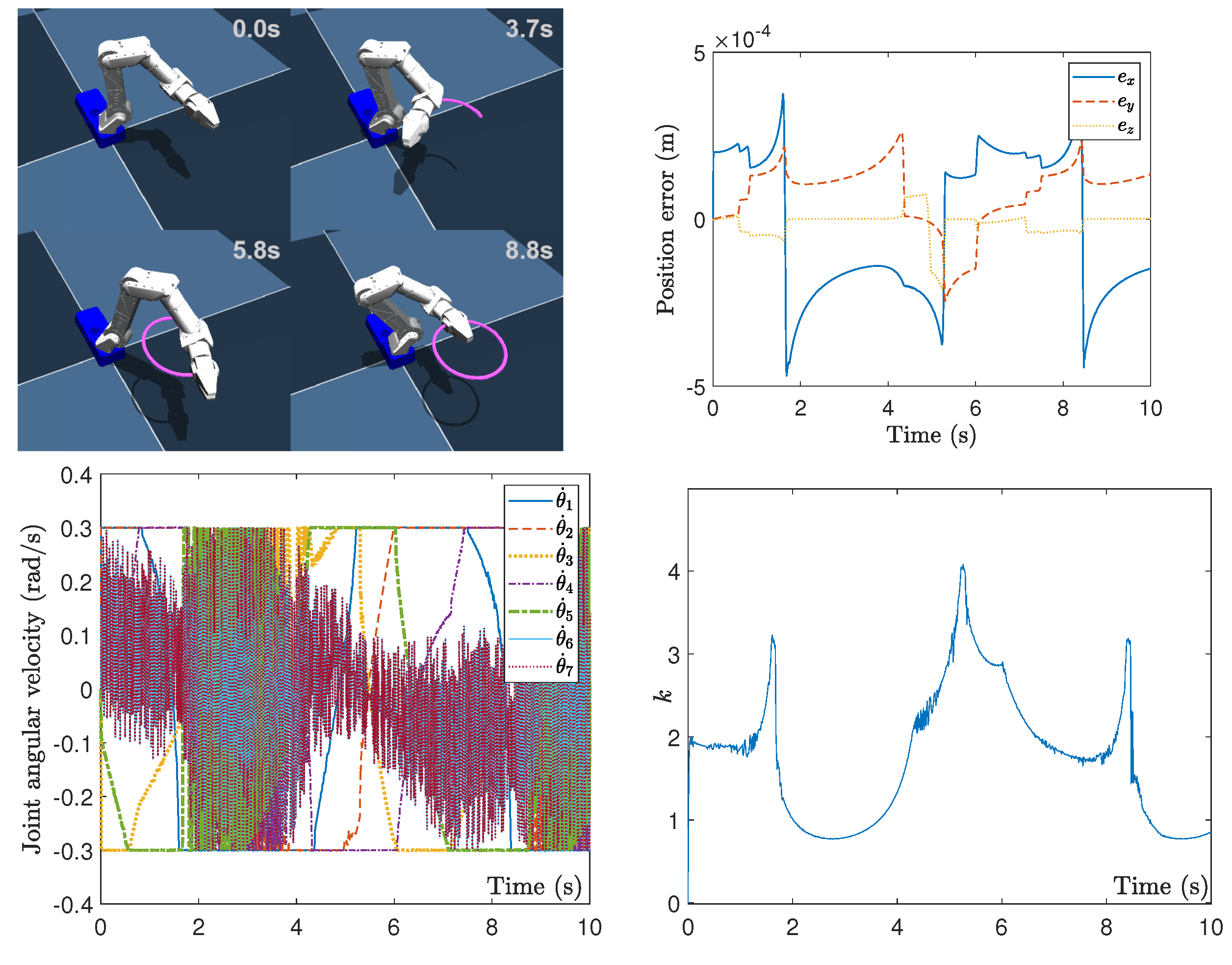
3.1.2. Tracking Performances
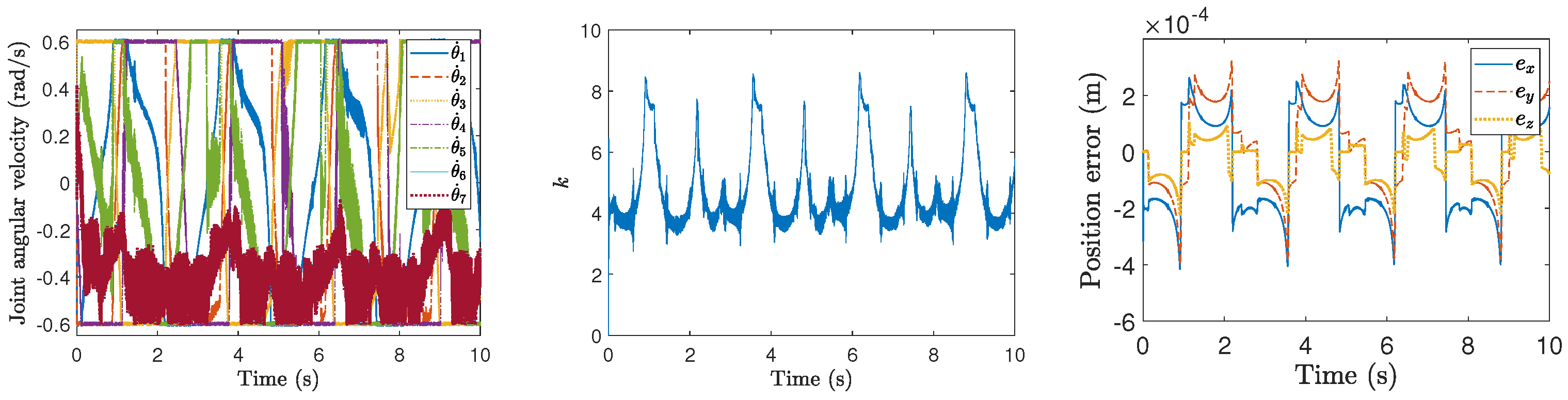
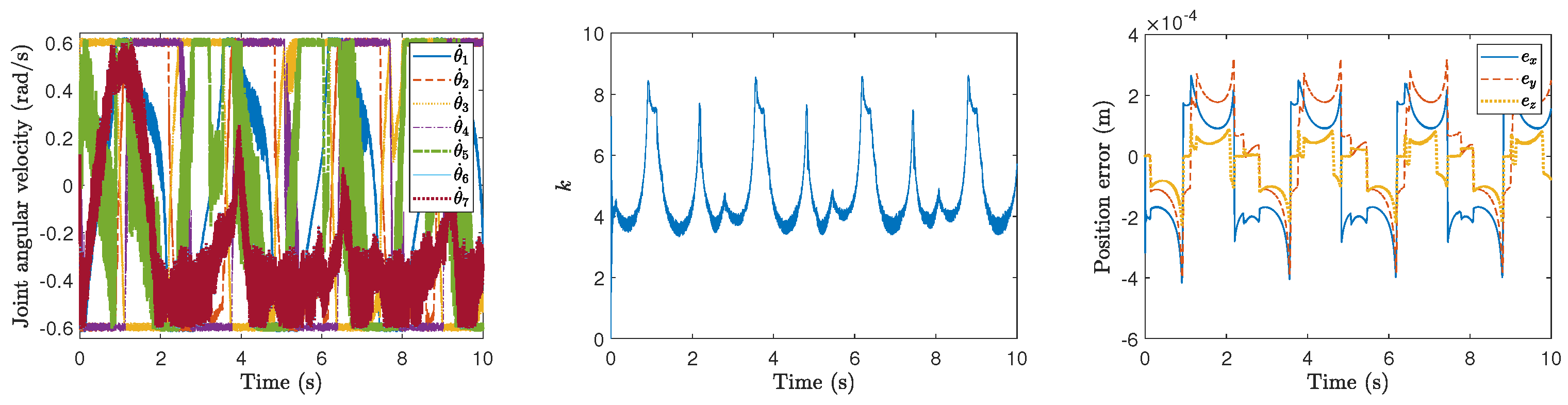
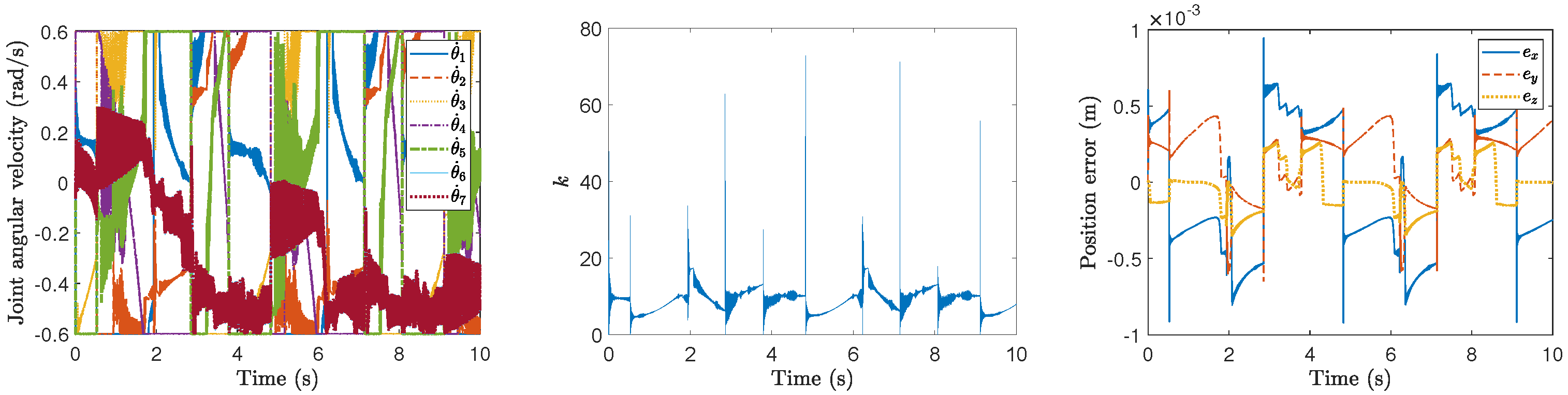
3.1.3. Comparison at Different Levels of Noises
3.2. Experimental Results
3.2.1. Experiment Setup
3.2.2. Tracking Performances and Comparative Study with Other Schemes
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chen, X.; Jin, L.; Hu, B. A cerebellum-inspired control scheme for kinematic control of redundant manipulators. IEEE Trans. Ind. Electron. 2023, 71, 7539–7547. [Google Scholar] [CrossRef]
- Zhang, Y.; Jin, L. Robot Manipulator Redundancy Resolution; John Wiley & Sons: Hoboken, NJ, USA, 2017. [Google Scholar]
- Klein, C.A.; Huang, C.H. Review of pseudoinverse control for use with kinematically redundant manipulators. IEEE Trans. Syst. Man Cybern. 1983, SMC-13, 245–250. [Google Scholar] [CrossRef]
- Nenchev, D.N. Redundancy resolution through local optimization: A review. J. Robot. Syst. 1989, 6, 769–798. [Google Scholar] [CrossRef]
- Kanoun, O.; Lamiraux, F.; Wieber, P.B. Kinematic control of redundant manipulators: Generalizing the task-priority framework to inequality task. IEEE Trans. Robot. 2011, 27, 785–792. [Google Scholar] [CrossRef]
- Liu, M.; Li, Y.; Chen, Y.; Qi, Y.; Jin, L. A distributed competitive and collaborative coordination for multirobot systems. IEEE Trans. Mob. Comput. 2024, 23, 11436–11448. [Google Scholar] [CrossRef]
- Zhang, Y.; Ge, S.S.; Lee, T.H. A unified quadratic-programming-based dynamical system approach to joint torque optimization of physically constrained redundant manipulators. IEEE Trans. Syst. Man Cybern. Part B 2004, 34, 2126–2132. [Google Scholar] [CrossRef]
- Xie, Z.; Jin, L.; Luo, X.; Sun, Z.; Liu, M. RNN for repetitive motion generation of redundant robot manipulators: An orthogonal projection-based scheme. IEEE Trans. Neural Netw. Learn. Syst. 2020, 33, 615–628. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhang, Y. Variable joint-velocity limits of redundant robot manipulators handled by quadratic programming. IEEE/ASME Trans. Mechatronics 2012, 18, 674–686. [Google Scholar] [CrossRef]
- Khan, A.H.; Li, S.; Luo, X. Obstacle avoidance and tracking control of redundant robotic manipulator: An RNN-based metaheuristic approach. IEEE Trans. Ind. Inf. 2019, 16, 4670–4680. [Google Scholar] [CrossRef]
- Jin, L.; Su, Z.; Fu, D.; Xiao, X. Coevolutionary neural solution for nonconvex optimization with noise tolerance. IEEE Trans. Neural Netw. Learn. Syst. 2023, 35, 17571–17581. [Google Scholar] [CrossRef]
- Jin, L.; Chen, Y.; Liu, M. A noise-tolerant k-WTA model with its application on multirobot system. IEEE Trans. Ind. Inf. 2023, 20, 3574–3584. [Google Scholar] [CrossRef]
- Li, S.; Zhou, M.; Luo, X. Modified Primal-Dual Neural Networks for Motion Control of Redundant Manipulators With Dynamic Rejection of Harmonic Noises. IEEE Trans. Neural Netw. Learn. Syst. 2018, 29, 4791–4801. [Google Scholar] [CrossRef] [PubMed]
- Li, S.; Wang, H.; Rafique, M.U. A Novel Recurrent Neural Network for Manipulator Control With Improved Noise Tolerance. IEEE Trans. Neural Netw. Learn. Syst. 2018, 29, 1908–1918. [Google Scholar] [CrossRef]
- Tan, N.; Yu, P.; Zhong, Z.; Ni, F. A New Noise-Tolerant Dual-Neural-Network Scheme for Robust Kinematic Control of Robotic Arms With Unknown Models. IEEE/CAA J. Autom. Sin. 2022, 9, 1778–1791. [Google Scholar] [CrossRef]
- Zhang, Z.; Chen, S.; Deng, X.; Liang, J. A Circadian Rhythms Neural Network for Solving the Redundant Robot Manipulators Tracking Problem Perturbed by Periodic Noise. IEEE/ASME Trans. Mechatronics 2021, 26, 3232–3242. [Google Scholar] [CrossRef]
- Li, Z.; Li, S. Time-optimal constrained kinematic control of robotic manipulators by recurrent neural network. Expert Syst. Appl. 2024, 257, 124994. [Google Scholar] [CrossRef]
- Galicki, M. Time-optimal controls of kinematically redundant manipulators with geometric constraints. IEEE Trans. Robot. Autom. 2000, 16, 89–93. [Google Scholar] [CrossRef]
- Reiter, A.; Müller, A.; Gattringer, H. On Higher Order Inverse Kinematics Methods in Time-Optimal Trajectory Planning for Kinematically Redundant Manipulators. IEEE Trans. Ind. Inf. 2018, 14, 1681–1690. [Google Scholar] [CrossRef]
- Liu, G.; Li, Q.; Yang, B.; Zhang, H.; Fang, L. An Efficient Linear Programming-Based Time-Optimal Feedrate Planning Considering Kinematic and Dynamics Constraints of Robots. IEEE Robot. Autom. Lett. 2024, 9, 2742–2749. [Google Scholar] [CrossRef]
- Yu, X.; Dong, M.; Yin, W. Time-optimal trajectory planning of manipulator with simultaneously searching the optimal path. Comput. Commun. 2022, 181, 446–453. [Google Scholar] [CrossRef]
- He, S.; Hu, C.; Lin, S.; Zhu, Y. An Online Time-Optimal Trajectory Planning Method for Constrained Multi-Axis Trajectory With Guaranteed Feasibility. IEEE Robot. Autom. Lett. 2022, 7, 7375–7382. [Google Scholar] [CrossRef]
- Xia, Y.S.; Feng, G.; Wang, J. A primal-dual neural network for online resolving constrained kinematic redundancy in robot motion control. IEEE Trans. Syst. Man Cybern. Part B 2005, 35, 54–64. [Google Scholar] [CrossRef] [PubMed]
- Li, S.; Zhang, Y.; Jin, L. Kinematic control of redundant manipulators using neural networks. IEEE Trans. Neural Netw. Learn. Syst. 2016, 28, 2243–2254. [Google Scholar] [CrossRef] [PubMed]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| i | (rad) | (m) | (m) | (rad) |
|---|---|---|---|---|
| 1 | 0 | 0 | 0.082 | |
| 2 | 0.04 | 0 | ||
| 3 | 0 | −0.26 | 0 | |
| 4 | 0.0765 | 0.206 | ||
| 5 | 0 | 0 | ||
| 6 | 0 | 0.138 | ||
| 7 | 0 | 0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kuang, Y.; Li, S.; Li, Z. Robust Time-Optimal Kinematic Control of Robotic Manipulators Based on Recurrent Neural Network Against Harmonic Noises. Actuators 2025, 14, 213. https://doi.org/10.3390/act14050213
Kuang Y, Li S, Li Z. Robust Time-Optimal Kinematic Control of Robotic Manipulators Based on Recurrent Neural Network Against Harmonic Noises. Actuators. 2025; 14(5):213. https://doi.org/10.3390/act14050213
Chicago/Turabian StyleKuang, Yiqun, Shuai Li, and Zhan Li. 2025. "Robust Time-Optimal Kinematic Control of Robotic Manipulators Based on Recurrent Neural Network Against Harmonic Noises" Actuators 14, no. 5: 213. https://doi.org/10.3390/act14050213
APA StyleKuang, Y., Li, S., & Li, Z. (2025). Robust Time-Optimal Kinematic Control of Robotic Manipulators Based on Recurrent Neural Network Against Harmonic Noises. Actuators, 14(5), 213. https://doi.org/10.3390/act14050213