In this section, simulation experiments are designed to demonstrate the controller performance and then the simulation results are analyzed to verify the robustness of the proposed controller.
6.1. Experiment Design
Eight experiments are designed to verify the effectiveness of the proposed control strategy considering different settings of platoon size, communication delays, disturbances, and penetration rates of CAVs; see
Table 1. The simulation parameter values are as follows. The simulation time is 200 s with the time interval of
= 0.1 s. The initial vehicle velocity
is set to the desired velocity
=
= 12 m/s. The initial spacing
is set to the desired spacing
= 50 m. The maximum and minimum velocities are
= 15 m/s and
= 7 m/s, respectively. The maximum and minimum accelerations are
= 2
and
= −5
, respectively. The safe time headway is set to
= 2 s. The degrees of vehicle response to velocity are set to
= 1 and
= 1. The weights on the control inputs are
= 0.5,
= 0.5, and
= 1. The vehicle length is taken as 4 m. The distance between vehicles at rest is taken as 2 m. The initial position of the first vehicle is set to 0 m, and each vehicle is distributed at intervals according to an initial spacing of 50 m. The total length of the road is 3000 m. The total number of vehicles is 10 vehicles in Scenarios 1a to 4a and 20 vehicles in Scenarios 1b to 4b. The penetration rates of CAVs in the heterogeneous traffic flows are 50%, and 80%, respectively. The communication delays are set to
= 1 s and
= 2 s, respectively. The disturbances of HDV motions on accelerations range from −2
to −3
. Similar designs can be implemented without adding difficulties.
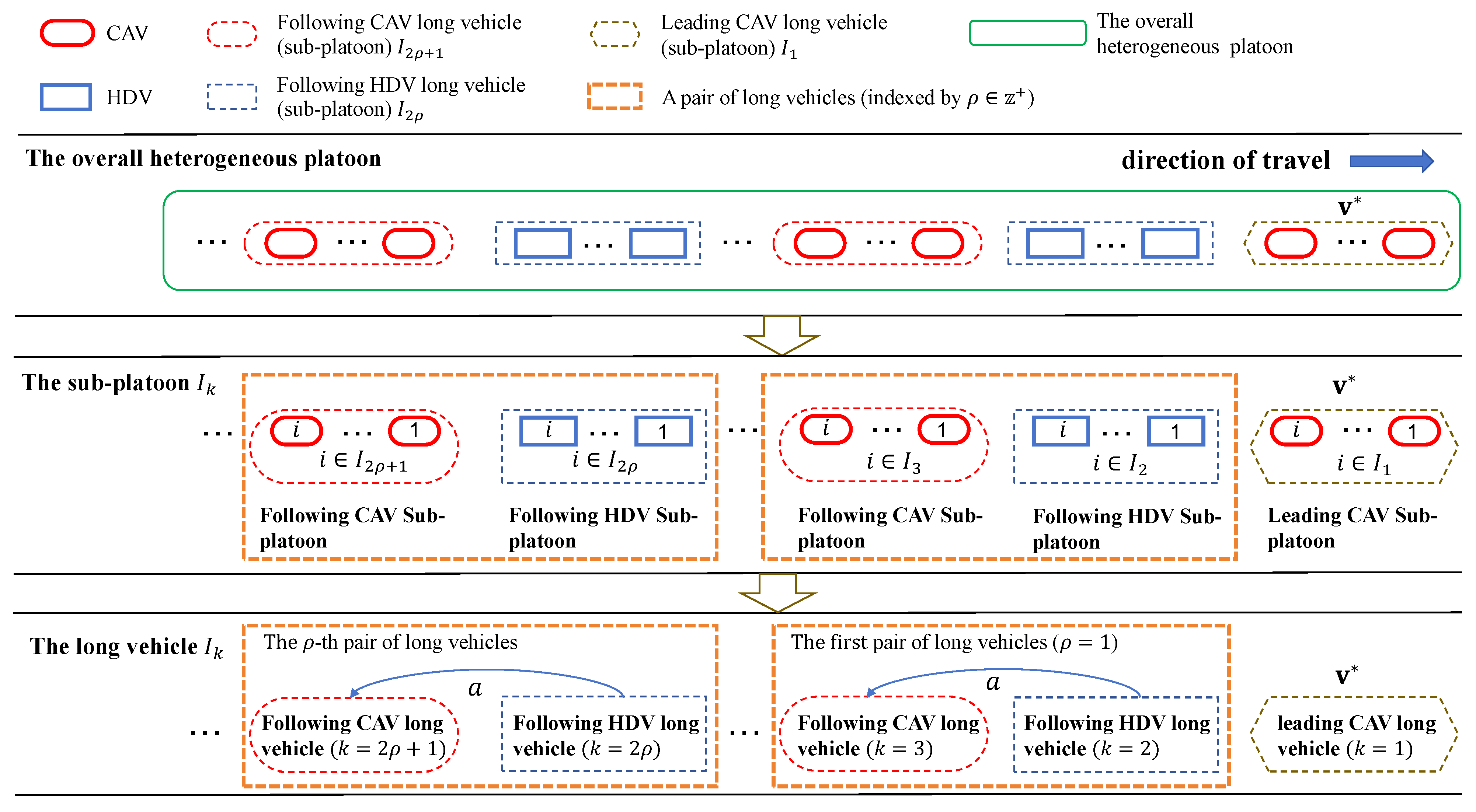
To incorporate the random CAV arrivals in the heterogeneous traffic flow, the stochastically heterogeneous traffic flow is designed as follows. The leading CAV sub-platoon and the first following HDV sub-platoon consist of one vehicle, i.e., for . For the other following vehicles from to the platoon tail, the Poisson distribution Pois() is adopted to generate stochastic vehicle sequences. The Poisson distribution parameter is set as the expected number of CAVs in the platoon, i.e., when the vehicle number is 10 under 50% penetration rate, and when the vehicle number is 10 under 80% penetration rate. The CAV positions in the platoon are randomly selected in the Poisson-distributed stochastic vehicle sequence, and the other positions hold for HDVs.
Scenarios 1a and 1b are designed to demonstrate the controller performance with the stochastic sequence of CAV in the heterogeneous traffic flow at 50% CAV penetration rate considering communication delay of = 1 s and disturbances of HDVs. The leading CAVs in Scenarios 1a and 1b travel at the equilibrium velocity, while the following HDV sub-platoon is set to decelerate at −2 from 11 s to 15 s. Scenarios 2a and 2b aim to test controller performance under an increased communication delay of = 2 s, with other settings remaining unchanged. Scenarios 3a and 3b are designed to evaluate the controller performance under different HDV disturbances of increased magnitude and frequency, while other settings are the same as Scenarios 1a and 1b. In Scenarios 3a and 3b, the first HDV in the following HDV sub-platoon decelerates at −3 from 11 s to 15 s and then decelerates at −2 from 81 s to 85 s. Scenarios 4a and 4b intend to demonstrate the controller performance in higher CAV penetration rates of 80% and the other settings are the same as Scenarios 1a and 1b.
6.2. Simulation Results and Analysis
The generated trajectories of the proposed controller in Scenarios 1a to 4b are illustrated in
Figure 3,
Figure 4,
Figure 5,
Figure 6,
Figure 7,
Figure 8,
Figure 9 and
Figure 10, which demonstrate the platoon stability of the heterogeneous traffic flow. In these figures, the HDVs and CAVs are distinguished by the solid and dashed line styles. The red solid line represents the disturbed HDV, the solid orange lines represent the second HDV in
, and the gray solid lines represent the other HDVs. The blue dashed lines represent the CAVs except for the second CAV in
, which is represented by the green dashed lines. The legend shows the vehicle sequence within the heterogeneous platoon. The trajectories of the first CAV and the first HDV are pre-defined. The first CAV travels with the equilibrium velocity and the first HDV applies the HDV dynamics model with the pre-defined disturbance settings. The horizontal axis is time and the vertical coordinates in
Figure 3a–c,
Figure 4a–c,
Figure 5a–c,
Figure 6a–c,
Figure 7a–c,
Figure 8a–c,
Figure 9a–c and
Figure 10a–c indicate the velocity, acceleration, and spacing, respectively. The maximum and minimum values of fluctuations in velocity, acceleration, and spacing for the second HDV and the second CAV are labeled in orange and green, respectively.
In the following analysis, the velocity stabilization of the overall platoon is reached when the velocity differences of all vehicles are less than 0.05 m/s, and the acceleration stabilization is reached when the acceleration differences of all vehicles are less than 0.01
. The time for velocity and acceleration stabilization are labeled as bold numbers on the horizontal axis of
Figure 3a,b,
Figure 4a,b,
Figure 5a,b,
Figure 6a,b,
Figure 7a,b,
Figure 8a,b,
Figure 9a,b and
Figure 10a,b.
Scenarios 1a and 1b simulate the communication delay of
= 1 s and the acceleration disturbance of −2
with 10 vehicles and 20 vehicles, respectively. The velocity, acceleration, and spacing trajectories in Scenarios 1a and 1b are illustrated in
Figure 3 and
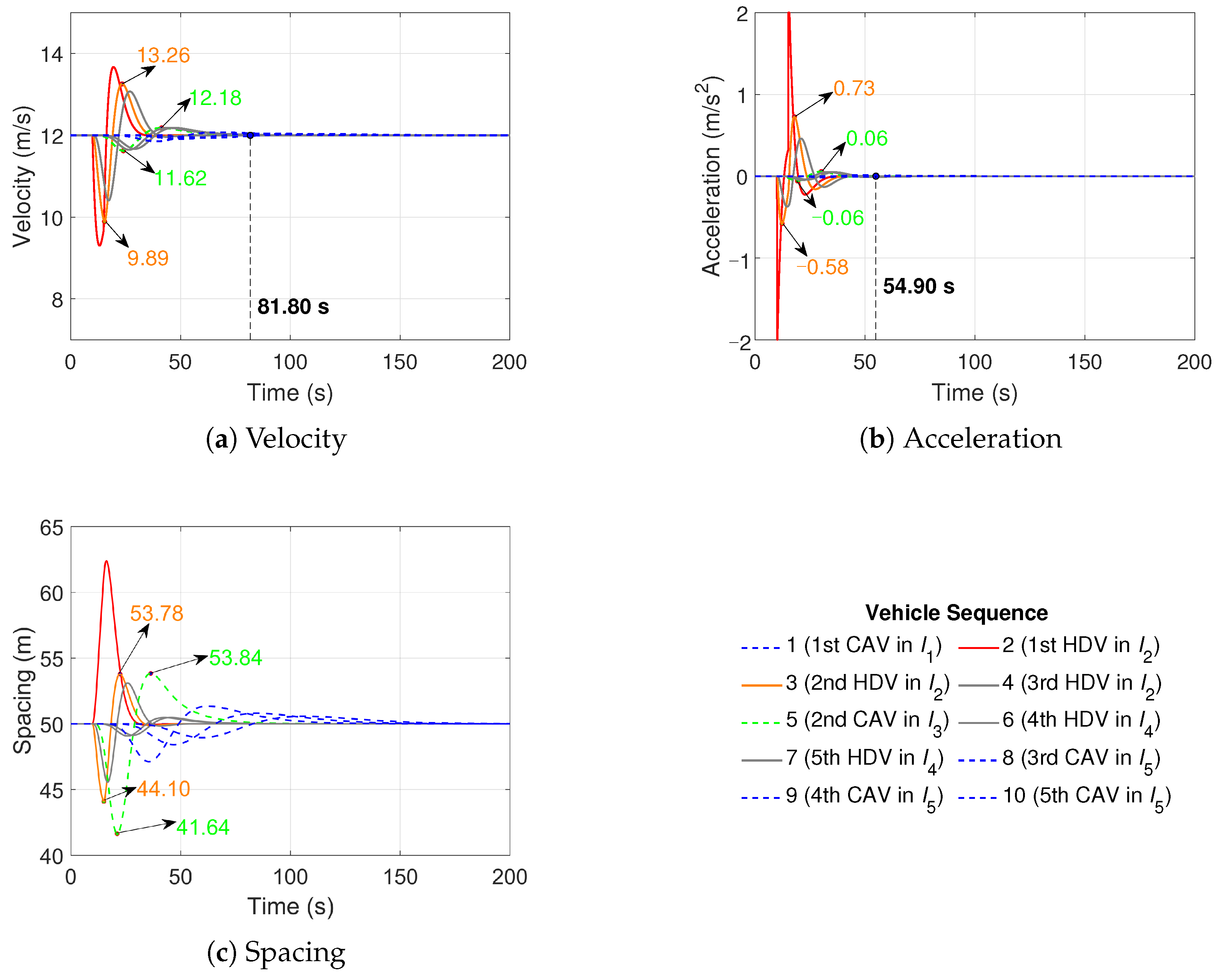
Figure 4.In Scenario 1a, five sub-platoons are stochastically generated, i.e., one CAV, three HDVs, one CAV, two HDVs, and three CAVs in
to
, respectively, as shown in the legend. The first HDV is set to decelerate with −2
from 11 s to 15 s, and later it starts to accelerate due to the car-following behavior of the HDV dynamics model. The acceleration fluctuations of the first HDV result in deviations of the following vehicles from the equilibrium velocity, acceleration, and spacing. The velocity fluctuations of the second HDV in
and the second CAV in
range from 9.89 m/s to 13.26 m/s and from 11.62 m/s to 12.18 m/s, respectively; see
Figure 3a. In
Figure 3b, the acceleration fluctuations of the second HDV in
and the second CAV in
range from −0.58
to 0.73
and from −0.06
to 0.06
, respectively. The second CAV deviates less than the second HDV from the equilibrium velocity and acceleration, which demonstrates the CAV stability facing external disturbances. The velocity stabilization and acceleration stabilization are reached at 81.80 s and 54.90 s, respectively; see
Figure 3a,b. It is convincing that the proposed controller can stabilize the heterogeneous traffic flow to the equilibrium velocity. In
Figure 3c, the spacings of the second HDV and the second CAV range from 44.10 m to 53.78 m and from 41.64 m to 53.84 m. The minimal spacing gap between the second CAV and the vehicle in front (41.64 m) is reached with the velocity of 11.69 m/s, which satisfies the safety following constraint. Since the controlled CAVs do not simply follow the decelerating motions of the preceding vehicles while the HDVs just follow the preceding vehicle, the space gaps of the CAVs are sometimes larger than the HDVs when the preceding vehicles decelerate, comparing the spacing changes between the second CAV and the second HDV in
Figure 3c.
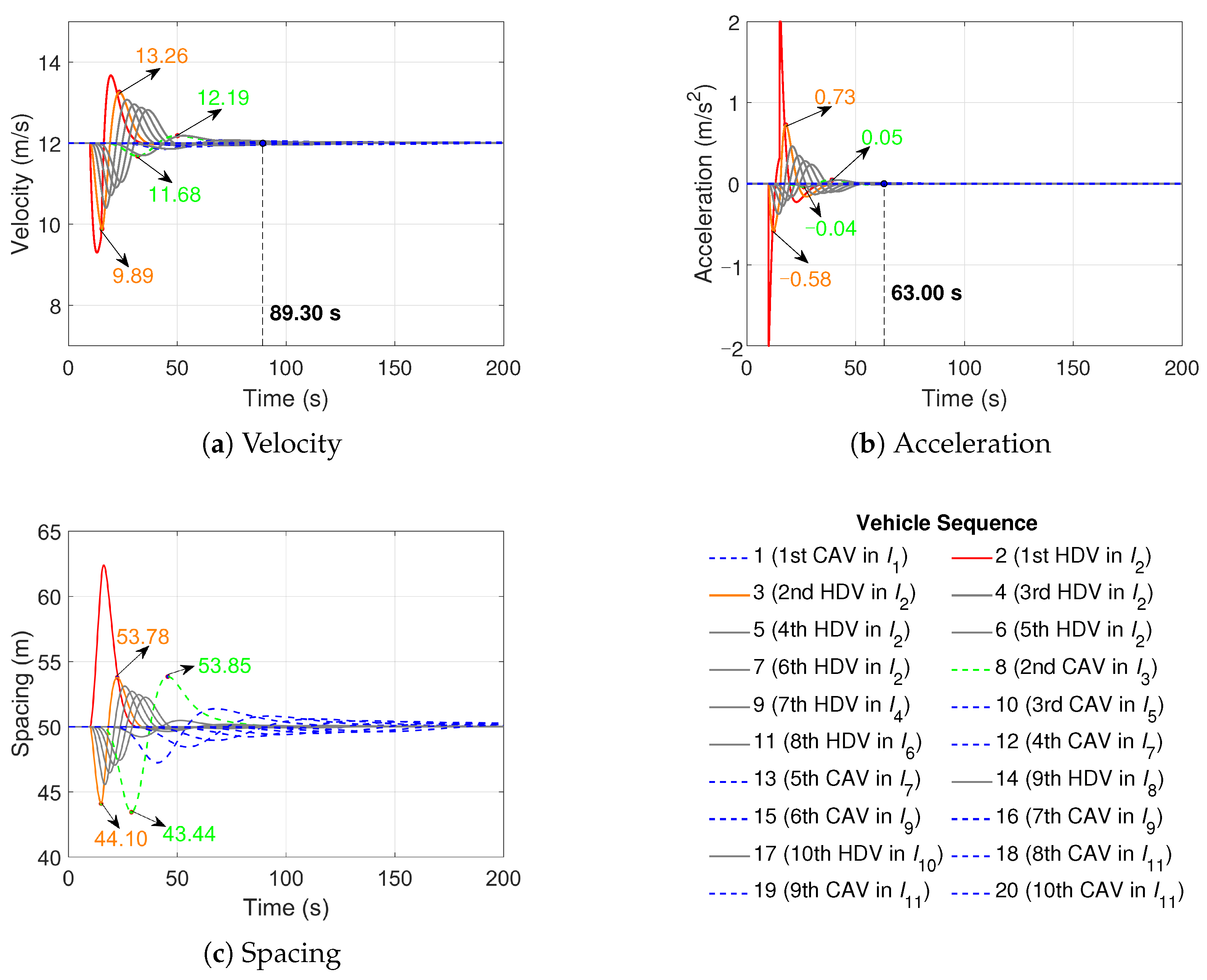
The heterogeneous platoon in Scenario 1b consists of eleven stochastically generated sub-platoons, i.e., one CAV, six HDVs, one CAV, one HDV, one CAV, one HDV, two CAVs, one HDV, two CAVs, one HDV, and three CAVs in
to
, respectively, as shown in the legend of
Figure 4. The magnitude of the communication delays and disturbances in Scenario 1b remains constant as in Scenario 1a, so the fluctuations of the second HDV in
in velocity, acceleration, and spacing in
Figure 4a–c are consistent with Scenario 1a in
Figure 3a–c. The
sub-platoon size changes in Scenarios 1a (three HDVs) and 1b (six HDVs), but the fluctuations in velocity, acceleration, and spacing of the second CAV in
(see the green numbers) are slightly affected, comparing
Figure 3a–c with
Figure 4a–c. Moreover, the times for velocity and acceleration stabilization in Scenario 1b are 89.30 s and 63.00 s, respectively, which are larger than the counterparts in Scenario 1a; see
Figure 4a–c. It can be concluded that the proposed control method can work in different platoon sizes, but an increase in platoon size leads to an increase in the time to stabilize the heterogeneous traffic flow.
Scenarios 2a and 2b are developed in a stochastic platoon sequence based on Scenarios 1a and 1b by increasing the communication delay
from 1 s to 2 s. The velocity, acceleration, and spacing trajectories are illustrated in
Figure 5 and
Figure 6. Nine sub-platoons are stochastically generated in Scenario 2a, i.e., one CAV, one HDV, one CAV, two HDVs, one CAV, one HDV, one CAV, one HDV, and one CAV in
to
, respectively, as shown in the legend.
Figure 5a labels the maximal and minimal velocity fluctuations of the second CAV and the second HDV, which are quite close. In
Figure 5b, the acceleration fluctuation of the second CAV is from −0.10
to 0.07
and the acceleration fluctuation of the second HDV is from −0.07
to 0.06
. Comparing Scenario 2a with Scenario 1a, the second HDV follows the second CAV in Scenario 2a other than the first HDV in Scenario 1a, the velocity and acceleration fluctuation of the second HDV in Scenario 2a are much less than the counterpart in Scenario 1a. As shown in
Figure 5a,b, the velocity and acceleration of the heterogeneous traffic flow are stable at 79.30 s and 52.00 s, respectively. The velocity and acceleration stabilization times in Scenario 2a are slightly different than Scenario 1a, which demonstrates the proposed controller is insensitive to an increase in the communication delay. The velocity and acceleration are stabilized faster in Scenario 2a compared with Scenario 1a since the disturbed HDV is followed by a CAV in Scenario 2a, which demonstrates the ability of CAVs to attenuate the disturbances and stabilize the traffic flow quickly. This observation verifies the CAVs can stabilize the traffic flow and reduce the adverse effects resulting from the disturbances on the following HDVs. The third CAV in
essentially travels at equilibrium; thus, two CAVs are sufficient to stabilize the heterogeneous platoon. In
Figure 5c, the spacing fluctuation of the second CAV is from 38.11 m to 53.77 and from 48.89 m to 50.47 m for the second HDV. The velocity is 11.86 m/s when the minimal spacing between the second CAV and the vehicle in front (38.11 m) is reached, which satisfies the safety constraint.
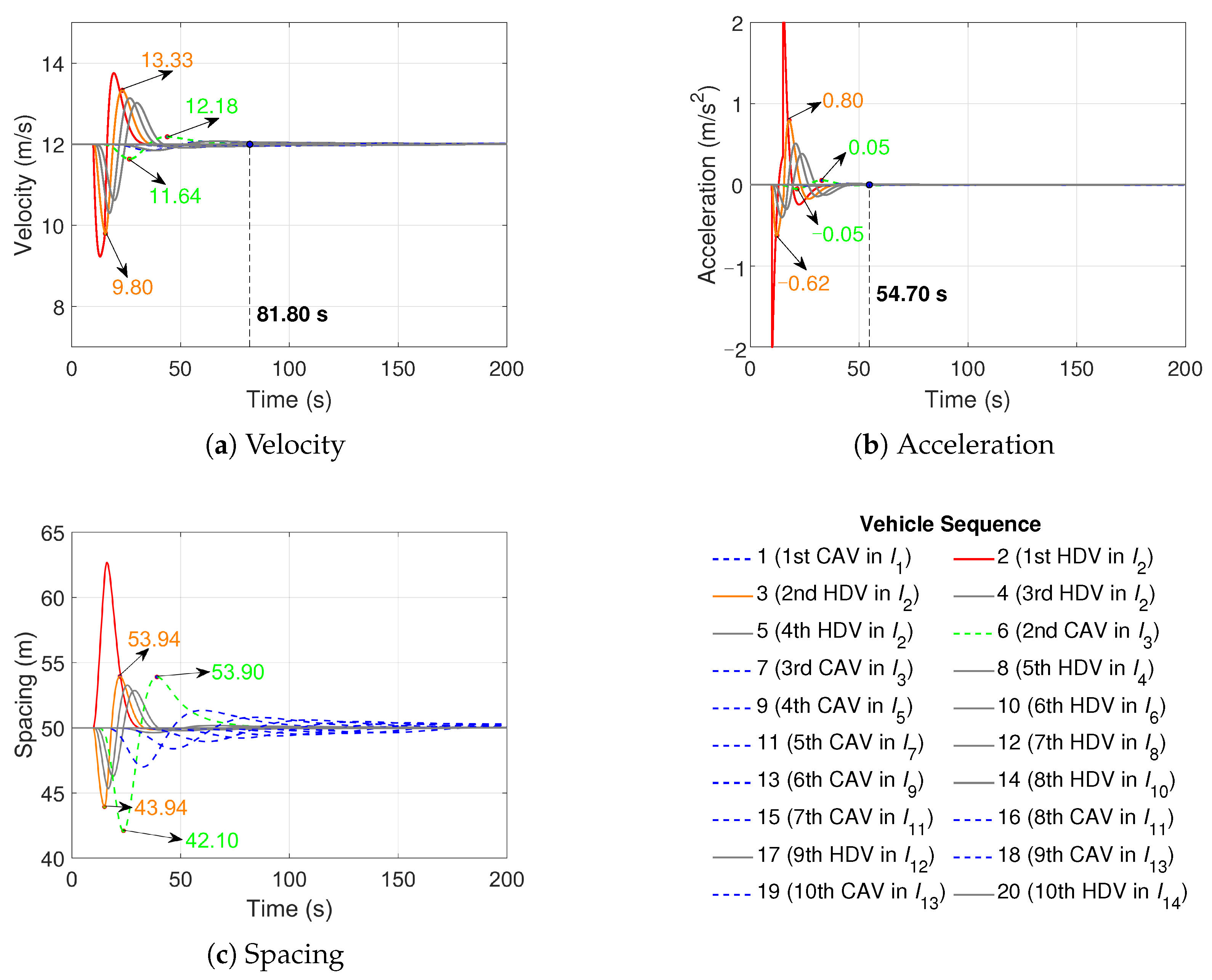
Scenario 2b generates 14 stochastic sub-platoons, i.e., one CAV, four HDVs, two CAVs, one HDV, one CAV, one HDV, one CAV, one HDV, one CAV, one HDV, two CAVs, one HDV, two CAVs, and one HDV in
to
, respectively, as shown in the legend of
Figure 6. Unlike Scenario 2a, three HDVs immediately follow the first HDV in Scenario 2b, and the disturbances are not diminished among these HDVs in
; see
Figure 6a–c. However, the fluctuations in velocity and acceleration of the second controlled CAV in
(see the green numbers) show slight variation compared with Scenario 2a, demonstrating the proposed control method can stabilize the heterogeneous traffic flow in different platoon sizes and configurations. The velocity stabilization and acceleration stabilization are reached at 81.80 s and 54.70 s, respectively. Compared with Scenario 2a, it is verified once again that a larger platoon size leads to a longer time to stabilize the heterogeneous traffic flow.
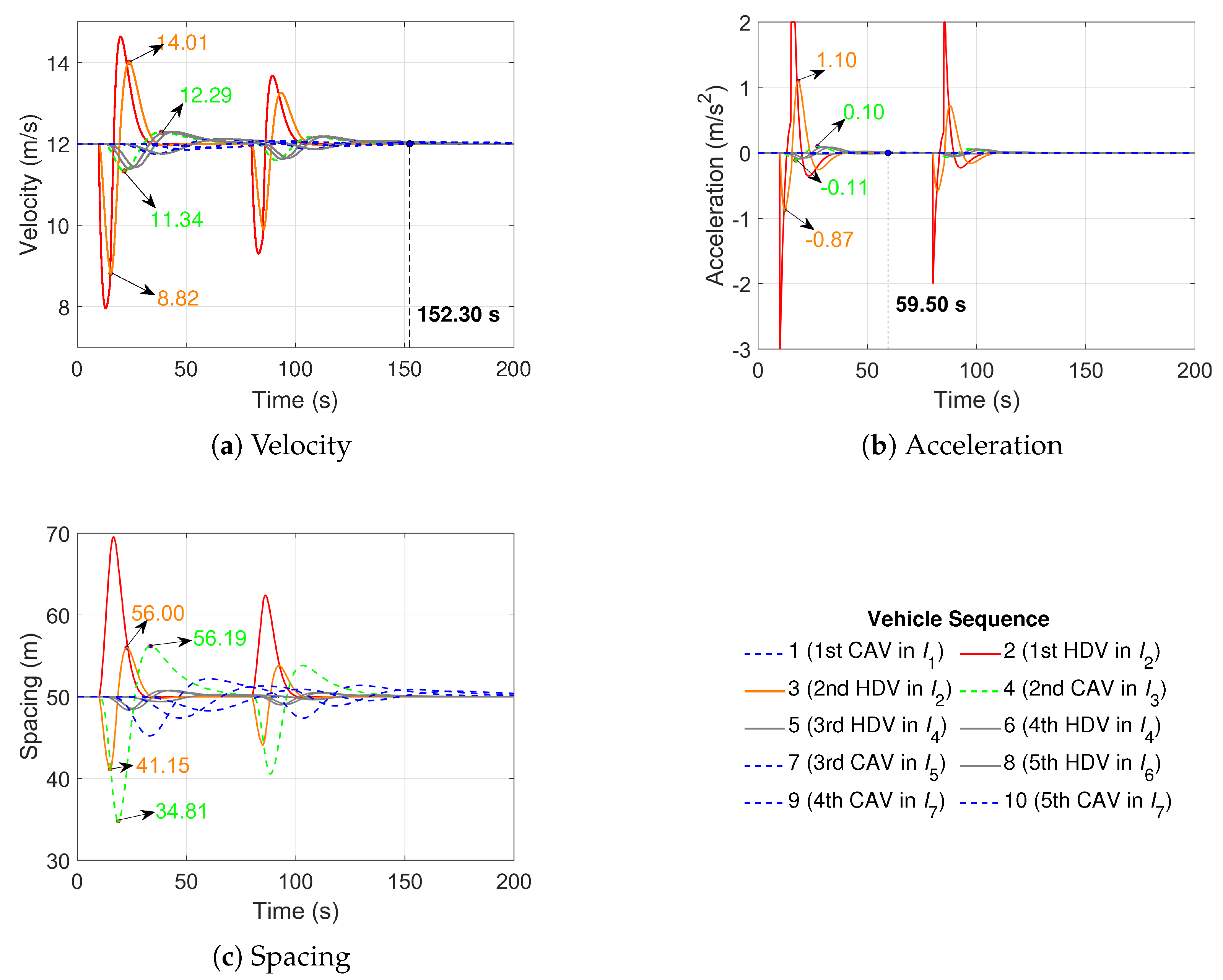
Scenarios 3a and 3b increase the disturbance frequency and amplitude from −2
to −3
, and the velocity, acceleration, and spacing trajectories are illustrated in
Figure 7 and
Figure 8. Seven sub-platoons are stochastically generated in Scenario 3a, i.e., one CAV, two HDVs, one CAV, two HDVs, one CAV, one HDV, and two CAVs in
to
, respectively, as shown in the legend. In
Figure 7a, the velocity fluctuation of the second HDV is from 8.82 m/s to 14.01 m/s and for the second CAV it is from 11.34 m/s to 12.29 m/s. In
Figure 7b, the acceleration fluctuation of the second HDV is from −0.87
to 1.10
and the acceleration fluctuation of the second CAV is from −0.11
to 0.10
. In
Figure 7c, the spacing fluctuation of the second HDV is from 41.15 m to 56.00 m. The spacing fluctuation of the second CAV is from 34.81 m to 56.19 m. The safety constraint is satisfied at the minimal spacing of 34.81 m with a velocity of 11.50 m/s. The velocity and acceleration stabilization times are 152.30 s and 59.50 s, respectively. The stabilization times are longer compared with Scenario 1a owing to the increased frequency and amplitude of the disturbances. Nevertheless, the heterogeneous traffic flow reaches equilibrium in Scenario 3a and the controller can effectively stabilize the heterogeneous traffic flow to the equilibrium velocity even if the disturbance frequency and amplitude are increased.
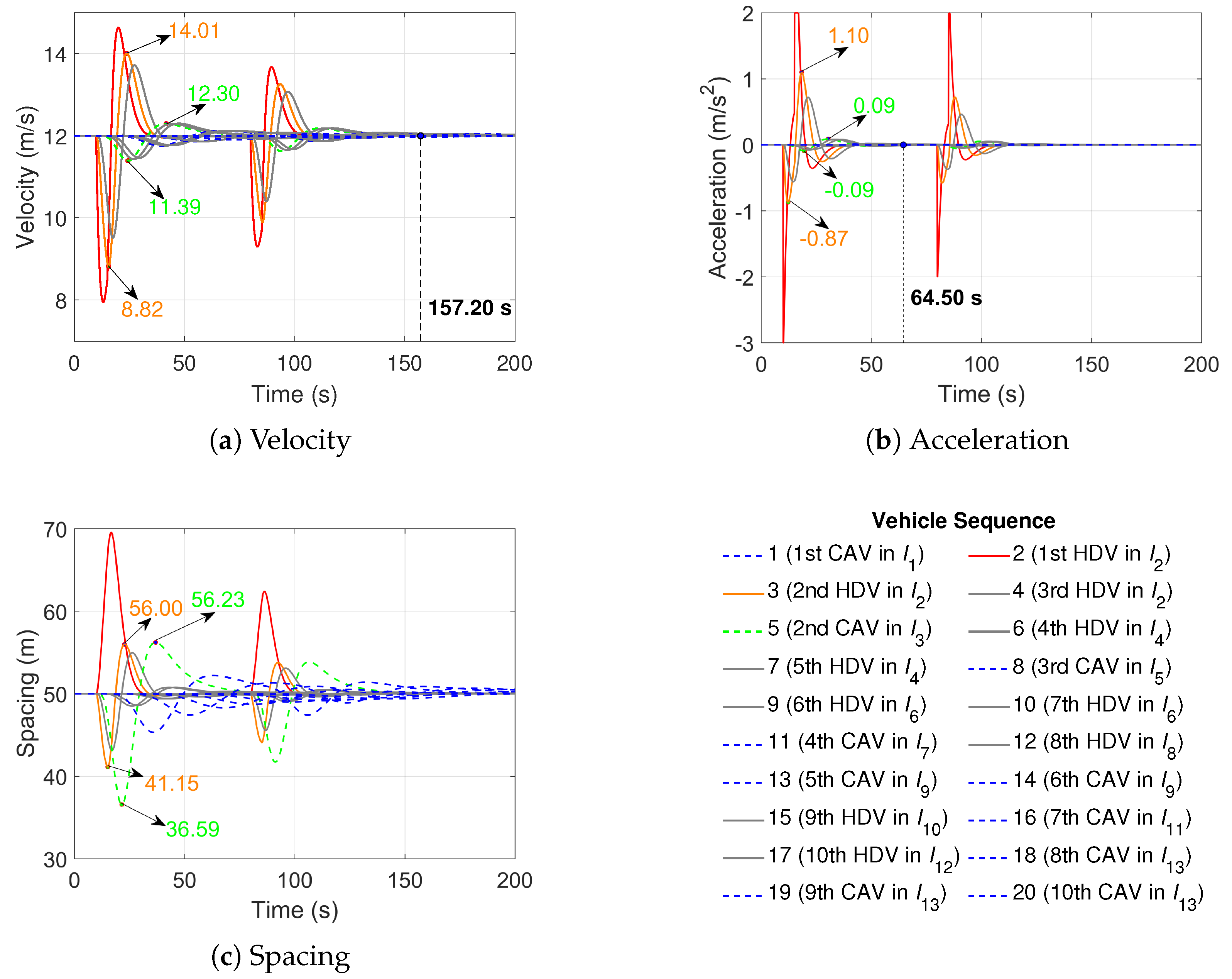
Scenario 3b generates 13 stochastic sub-platoons, i.e., 1 CAV, 3 HDVs, 1 CAV, 2 HDVs, 1 CAV, 2 HDVs, 1 CAV, 1 HDV, 2 CAVs, 1 HDV, 1 CAV, 1 HDV, and 3 CAVs in
to
, respectively, as shown in the legend of
Figure 8. Compared with Scenario 3a, the trajectories of the second HDV remain changed owing to the same vehicle sequence, whereas the trajectories of the second CAV change with small variations because of its varying vehicle sequence, as shown in
Figure 8a,c. It can be verified the changes in the platoon size and vehicle sequence slightly affect the performance of the controlled CAVs. Furthermore, the velocity and acceleration stabilization times of the heterogeneous traffic flow in
Figure 8a,b are longer than in Scenario 3a since the platoon size is enlarged in Scenario 3b.
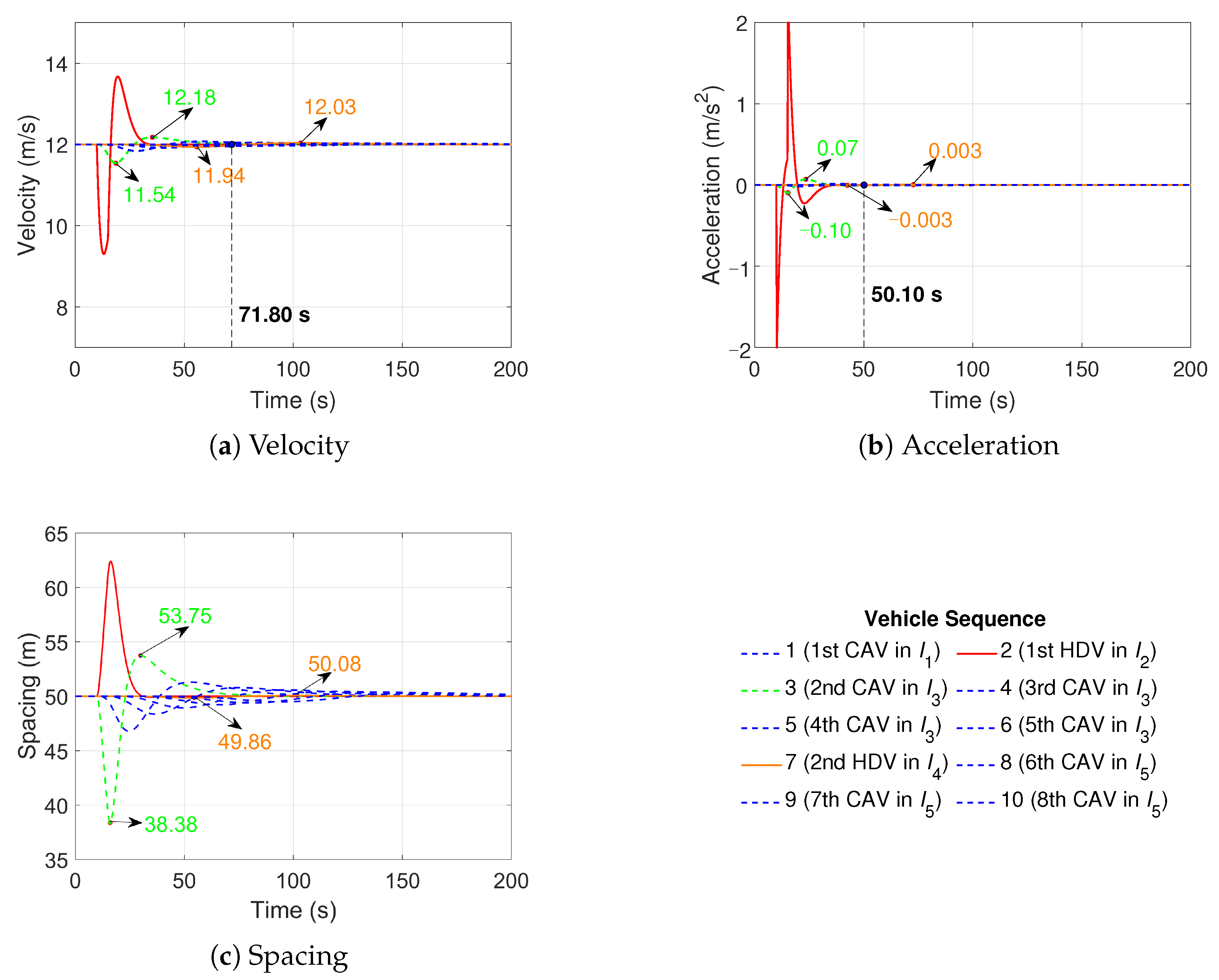
Scenarios 4a and 4b improve the CAV penetration rate to 80% based on Scenarios 1a and 1b, and the velocity, acceleration, and spacing trajectories are illustrated in
Figure 9 and
Figure 10. Five sub-platoons are stochastically generated in Scenario 4a, i.e., one CAV, one HDV, four CAVs, one HDV, and three CAVs in
to
, respectively, as shown in the legend. In
Figure 9a, the velocity of the second CAV fluctuates from 11.54 m/s to 12.18 m/s and the second HDV changes velocity from 11.94 m/s to 12.03 m/s. In
Figure 9b, the acceleration fluctuation of the second CAV is from −0.10
to 0.07
and the acceleration of the second HDV is generally unchanged, from −0.003 to 0.003
. We can see that the velocity and acceleration fluctuations of HDVs are reduced when the penetration rate of the CAVs increases. In
Figure 9c, the spacing fluctuations of the second CAV and the second HDV are from 38.38 m to 53.75 m and from 49.86 m to 50.08 m, respectively. The minimal spacing gap of 38.38 m still satisfies the safety constraint with the instant velocity of 11.67 m/s. The velocity and acceleration stabilization times are 71.80 s and 50.10 s, respectively. The proposed controller in Scenario 4a can quickly stabilize the heterogeneous traffic flow in 80% CAV penetration rate compared with Scenario 1a of 50% CAV penetration rate.
Scenario 4b generates seven stochastic sub-platoons, i.e., one CAV, two HDVs, one CAV, one HDV, six CAVs, one HDV, and eight CAVs in
to
, respectively, as shown in the legend of
Figure 10. In
Figure 10a–c, since the second HDV immediately follows the disturbed HDV, the velocity, acceleration, and spacing of the second HDV fluctuate significantly as the disturbed HDV does. The controlled CAVs are slightly affected by HDV disturbances; see the small fluctuations of the second CAV. The increased platoon size in Scenario 4b results in longer stabilization times for velocity and acceleration in the heterogeneous traffic flow. However, the differences in the stabilization times between Scenarios 4a and 4b are small due to the high penetration rate in Scenario 4b.
6.3. Comparison and Discussion
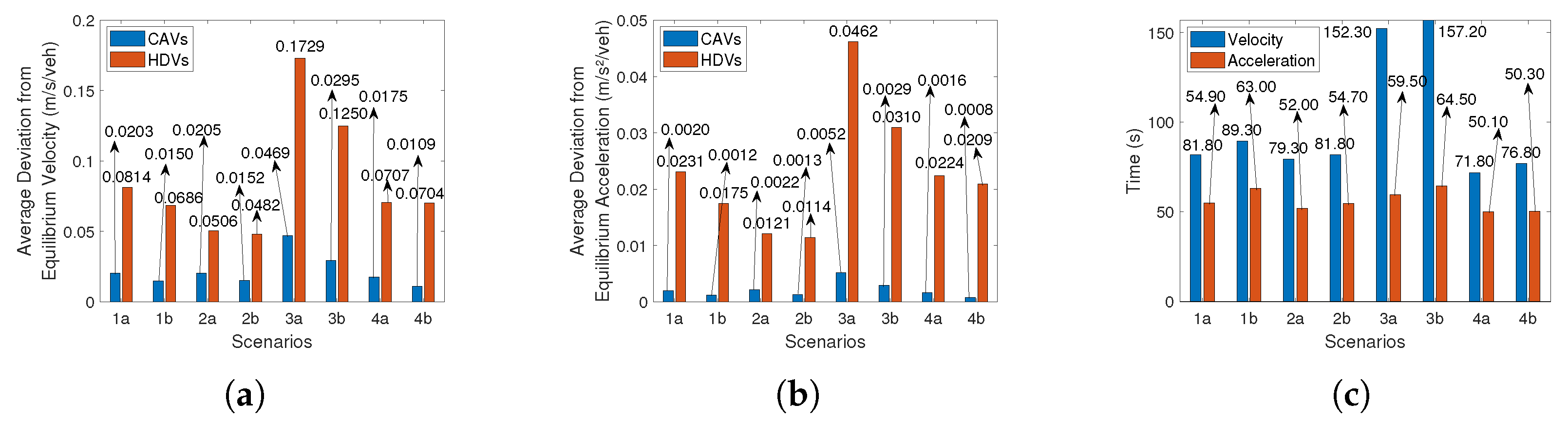
To further demonstrate the efficiency of the proposed controller, the deviations from the equilibrium velocity and acceleration for all CAVs and HDVs in Scenarios 1a to 4b are calculated, and the times for velocity and acceleration stabilization are listed for analysis; see
Figure 11. The horizontal axis represents different scenarios, and the vertical axes in
Figure 11a–c correspond to the average deviation from the equilibrium velocity, the average deviation from the equilibrium acceleration, and the times for velocity and acceleration stabilization, respectively.
Comparing Scenarios 1a to 2b, Scenarios 2a and 2b are conducted with an increased communication delay; thus, the average deviations from the equilibrium of the CAVs in Scenarios 2a and 2b are slightly greater than those in Scenarios 1a and 1b. This finding indicates that the proposed controller is insensitive to the communication delay. Scenarios 2a and 2b show fewer velocity and acceleration deviations from equilibrium for HDVs compared to Scenarios 1a and 1b, since the second CAV, which can stabilize the heterogeneous traffic flow, immediately follows the disturbed HDV. Comparing Scenario 1a with Scenario 2a, the times for velocity and acceleration stabilization in Scenario 2a are shorter than in Scenario 1a despite the increased communication delay in Scenario 2a. The same holds for Scenarios 1b and 2b. This observation demonstrates that the CAV sequence in the platoon matters and the CAVs can stabilize the heterogeneous traffic flow to be less affected by external disturbances. Since Scenarios 1b and 2b are conducted with a larger platoon size than Scenarios 1a and 2a, the times for velocity and acceleration stabilization in Scenarios 1b and 2b are longer, which illustrates that the increase in the platoon size positively affects the time for stabilization.
As shown in
Figure 11, the deviations from equilibrium of the CAVs are significantly smaller than those of the HDVs in Scenarios 3a and 3b, which demonstrates the controlled CAVs can stabilize the traffic flow to equilibrium, while the HDVs just follow the preceding vehicles. Scenarios 3a and 3b are designed with an increased frequency and amplitude of the disturbance. Therefore, compared with Scenarios 1a to 1b, the average deviations from the equilibrium of the CAVs and the times for acceleration and velocity stabilization in Scenarios 3a and 3b are larger. Scenarios 1b and 3b are conducted with 20 vehicles, so the times for velocity and acceleration stabilization are longer compared with Scenarios 1a and 3a with 10 vehicles. As discussed in Scenarios 4a to 4b, the proposed controller is capable of stabilizing heterogeneous traffic flows at various CAV penetration rates. As shown in
Figure 11, the times for velocity and acceleration stabilization decrease in Scenarios 4a to 4b compared with the other scenarios, which demonstrates the higher CAV penetration rates contribute to quicker stabilization of the heterogeneous traffic flow.
Overall, the controller performance in all scenarios verifies the proposed controller is insensitive to different ranges of communication delays and disturbances and is effective in stabilizing the heterogeneous traffic flow and attenuating the disturbance in the presence of different platoon sizes, communication delays, disturbances, and CAV penetration rates. The simulation results coincide with the intuition that CAVs can effectively stabilize disturbances in the heterogeneous traffic flow and reach the desired velocity and acceleration, while the HDVs just follow the preceding vehicles. The deviations from the equilibrium of the CAVs are less than the deviations of the HDVs in all scenarios. The increased platoon size lengthens the time for velocity and acceleration stabilization of the overall heterogeneous traffic flow but does not impact the controller performance. The changes in the vehicle sequence influence the stabilization time and the deviations from the equilibrium but rarely affect the performance of the controlled CAVs. The higher CAV penetration rates contribute to quicker stabilization of the heterogeneous traffic flow.
To further validate the effectiveness of the proposed method, comparative experiments are designed where CAVs are controlled using the IDM [
34] and LQR [
35], respectively. The comparative experiments are conducted using the same settings as Scenario 1a, including vehicle number, delay, and disturbance settings, apart from the difference in 20% CAV penetration rate and the platoon sequence (four sub-platoons of one CAV, one HDV, one CAV, and seven HDVs in
to
). The heterogeneous platoon trajectories using different approaches are demonstrated in
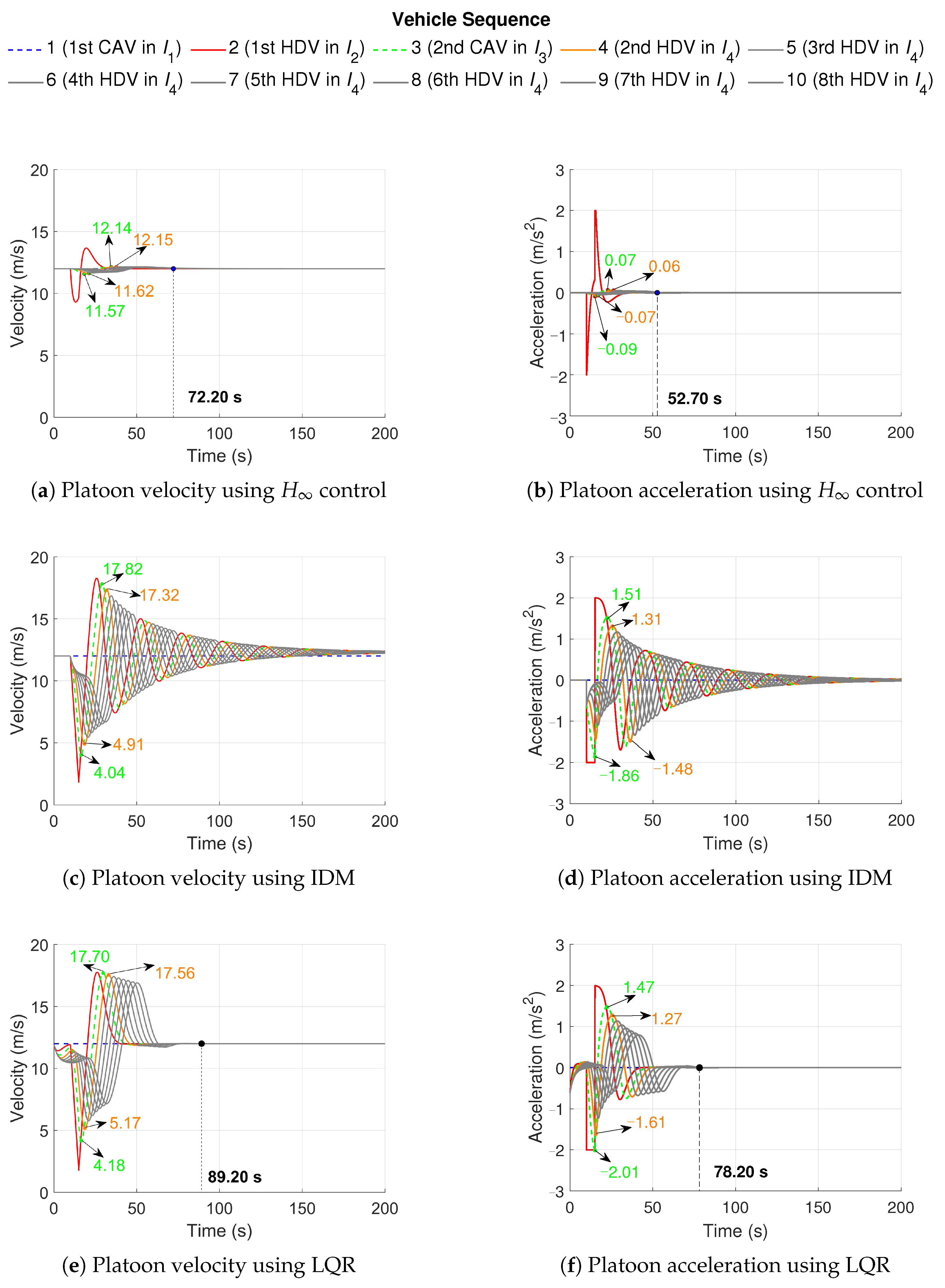
Figure 12, which verifies that the proposed control method has a significant effect on stabilizing the traffic flow compared to IDM and LQR.
Figure 12a,b show the platoon acceleration and platoon velocity using the proposed
control method. The acceleration and velocity of the controlled CAV in
fluctuates in a small range from 11.57 to 12.14 m/s and from −0.09 to 0.07
, respectively. The second HDV in
exhibits smaller fluctuations in velocity and acceleration, from 11.62 to 12.15 m/s and from −0.07 to 0.06
, respectively. The velocity and acceleration of the overall platoon converge within 72.20 s and 52.70 s, which demonstrates the ability of the proposed
control method to suppress the disturbances.
The platoon acceleration and platoon velocity using the IDM are presented in
Figure 12c,d. The acceleration and velocity fluctuations of the CAV increase significantly subject to the first perturbed HDV in
, ranging from 4.04 to 17.82 m/s and −1.86 to 1.51
, respectively. The second HDV exhibited significant velocity and acceleration fluctuations due to the inability of CAV to suppress the disturbance using the IDM, from 4.91 to 17.32 m/s and −1.48 to 1.31
, respectively. The velocity and acceleration of the entire platoon using IDM are unable to converge, as the IDM cannot effectively stabilize perturbations in the traffic flow.
Figure 12e,f show the platoon acceleration and platoon velocity using the LQR. The velocity and acceleration fluctuations of the controlled CAV are relatively significant, from 4.18 to 17.70 m/s and from −2.01 to 1.47
, respectively. The second HDV also shows significant fluctuations in velocity and acceleration, from 5.17 to 17.56 m/s and −1.61 to 1.27
. The velocity and acceleration of the platoon converge within 89.20 s and 78.20 s, respectively, demonstrating the ability of the LQR controller to suppress the propagation of disturbances. However, the convergence time is longer compared with the proposed
control method, as in
Figure 12a,b, which verifies the robustness and effectiveness of the proposed control method.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}