
Lateral Trajectory Tracking of Self-Driving Vehicles Based on Sliding Mode and Fractional-Order Proportional-Integral-Derivative Control


Abstract
:1. Introduction
- Based on the two-degree-of-freedom dynamics model and single-point preview model, an SMC + FOPID trajectory tracking lateral motion controller is proposed.
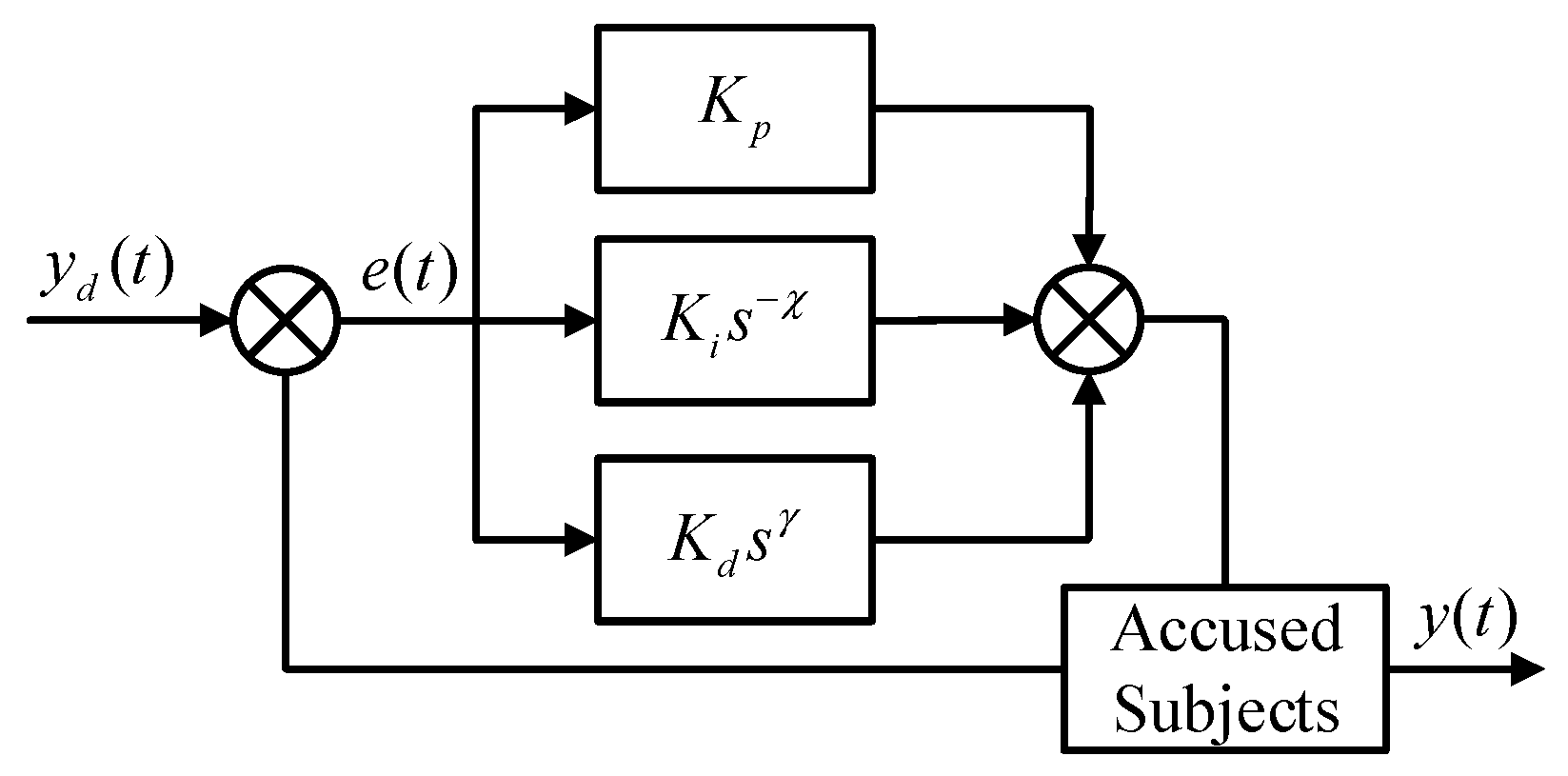
- Integral order and derivative order can be freely adjusted from 0 to 2 in the FOPID controller, which will extend the lag phase angle for fractional order integrals and the overtravel phase angle for derivatives from 0°~90° to 0°~180°. This allows for more comprehensive parameter tuning, as well as a memory function for the integral and derivative terms that allows the system to achieve better control. The FOPID controller plays a role in compensating the tracking error to the SMC controller and enhances the operational flexibility of the control system.
- Based on the hardware device, data acquisition of realistic driver operations with different driving experiences under preset road conditions is achieved.
- Simulation and hardware-in-the-loop comparison experiments yielded that the overall control performance of the designed controller outperforms that of the selected driver data, SMC controller, PID controller, and model prediction controller.
2. Control System Model for Lateral Motion
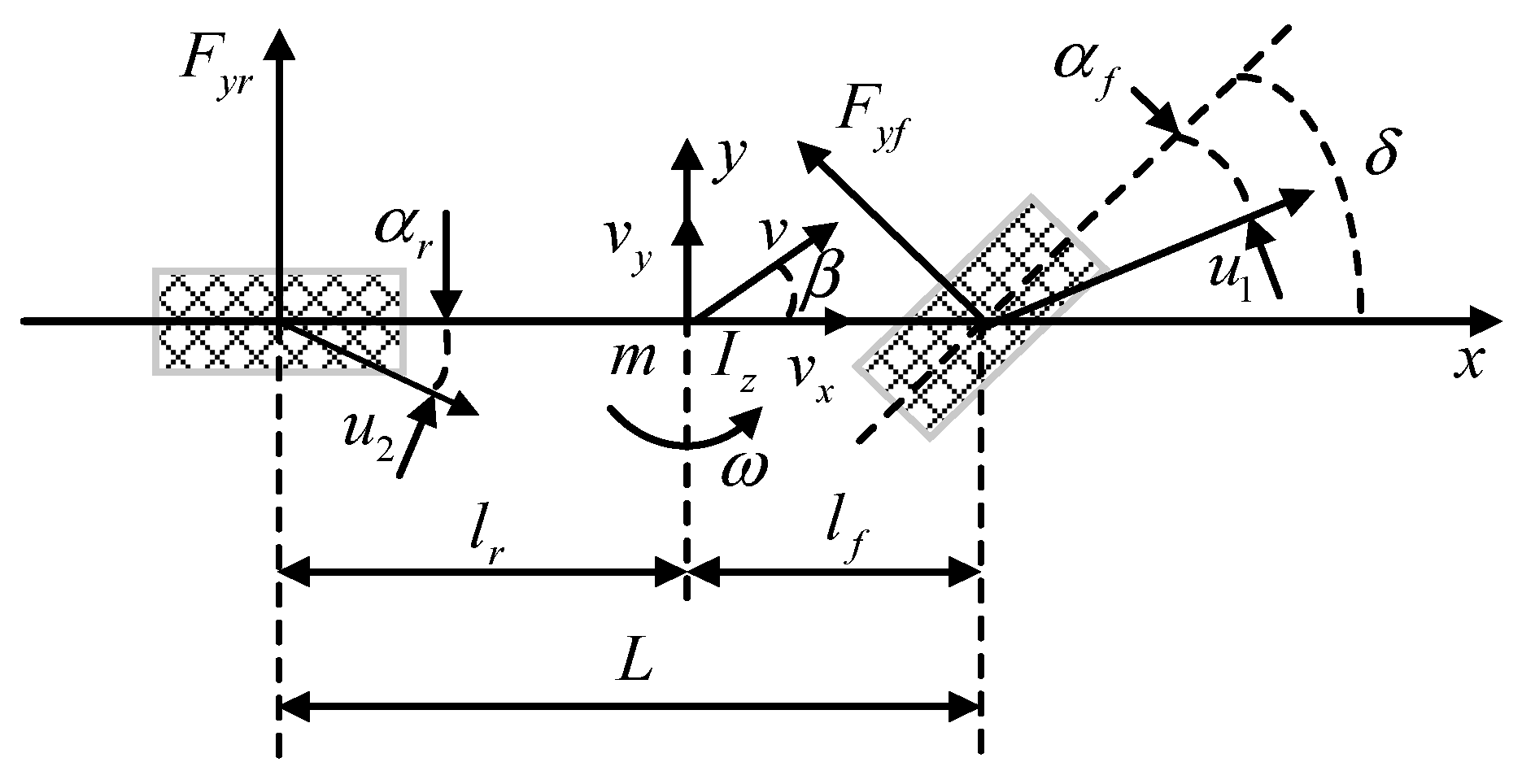
2.1. Vehicle Dynamics Model
2.2. Single-Point Preview Model
3. Lateral Control Strategy
3.1. Design of Sliding Mode Controller
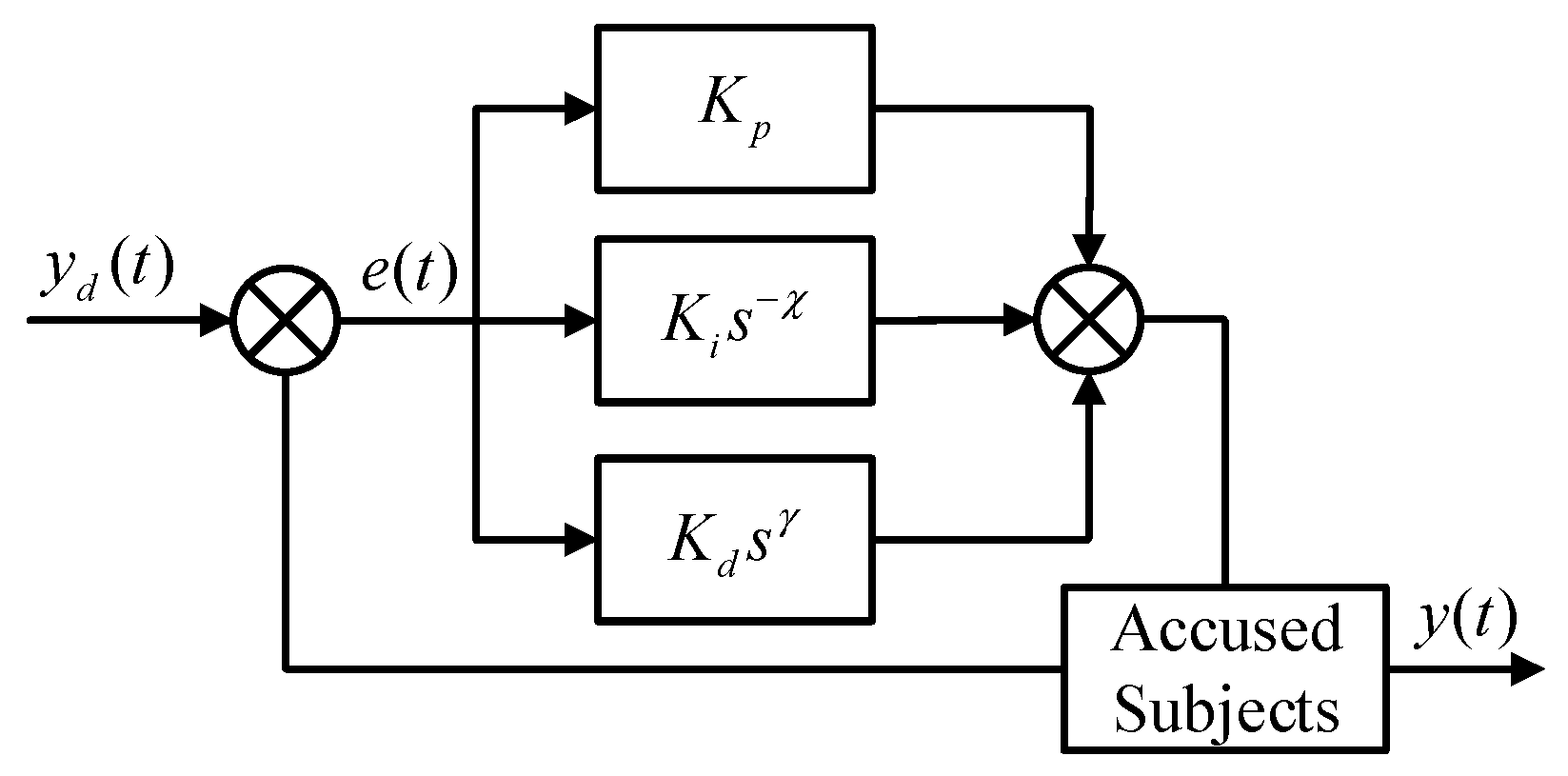
3.2. Design of Fractional-Order Proportional-Integral-Derivative Controller
4. Driver Operation Data Collection and Analysis
5. Simulation and Hardware-in-the-Loop Test
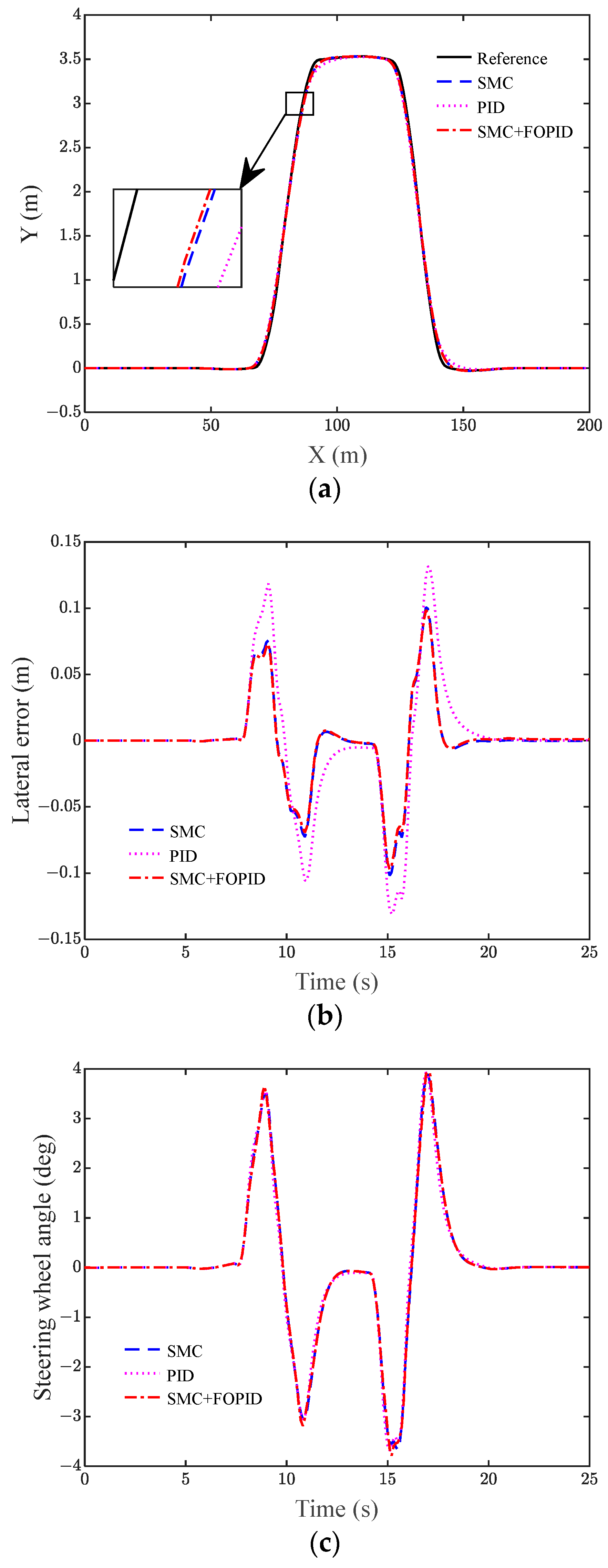
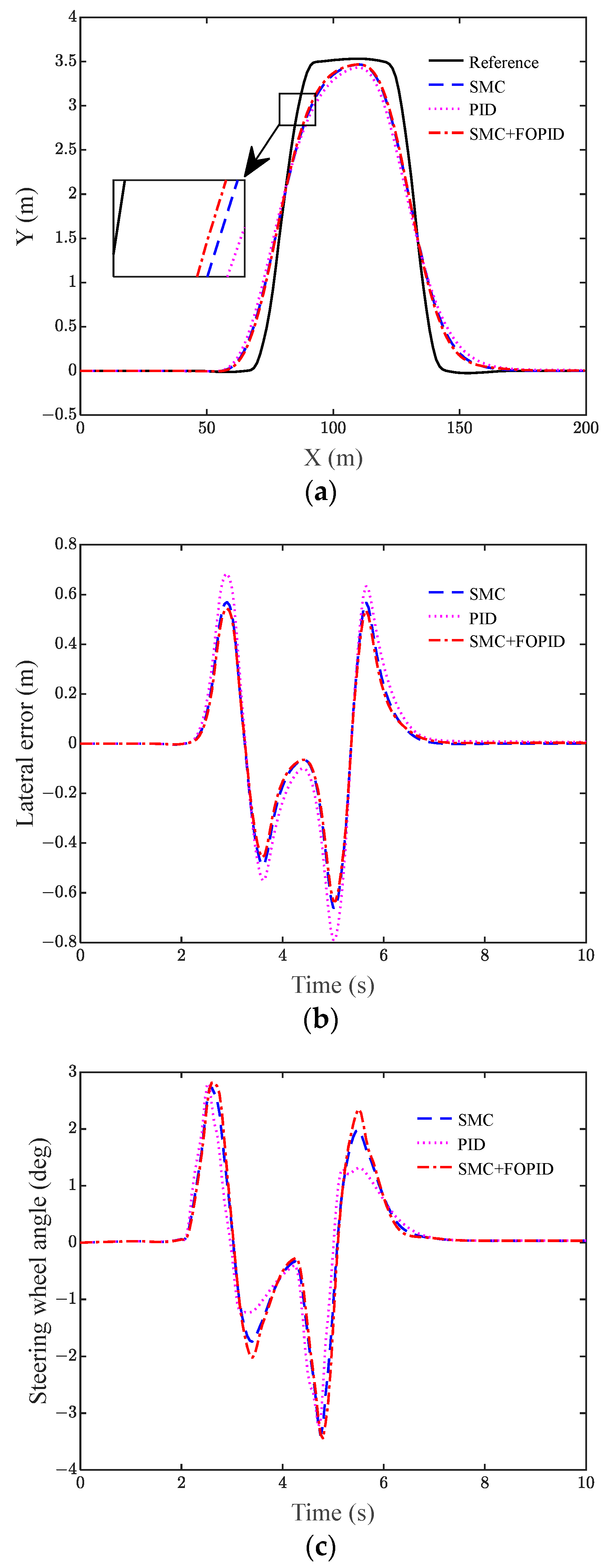
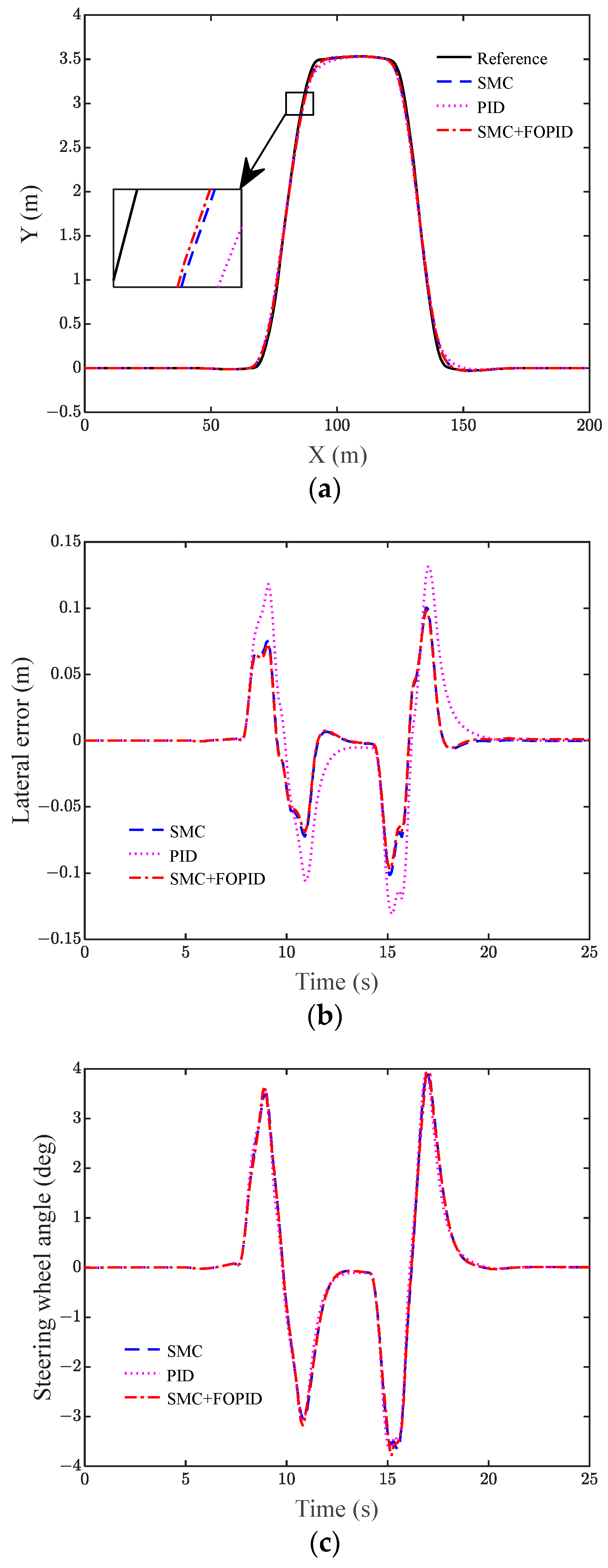
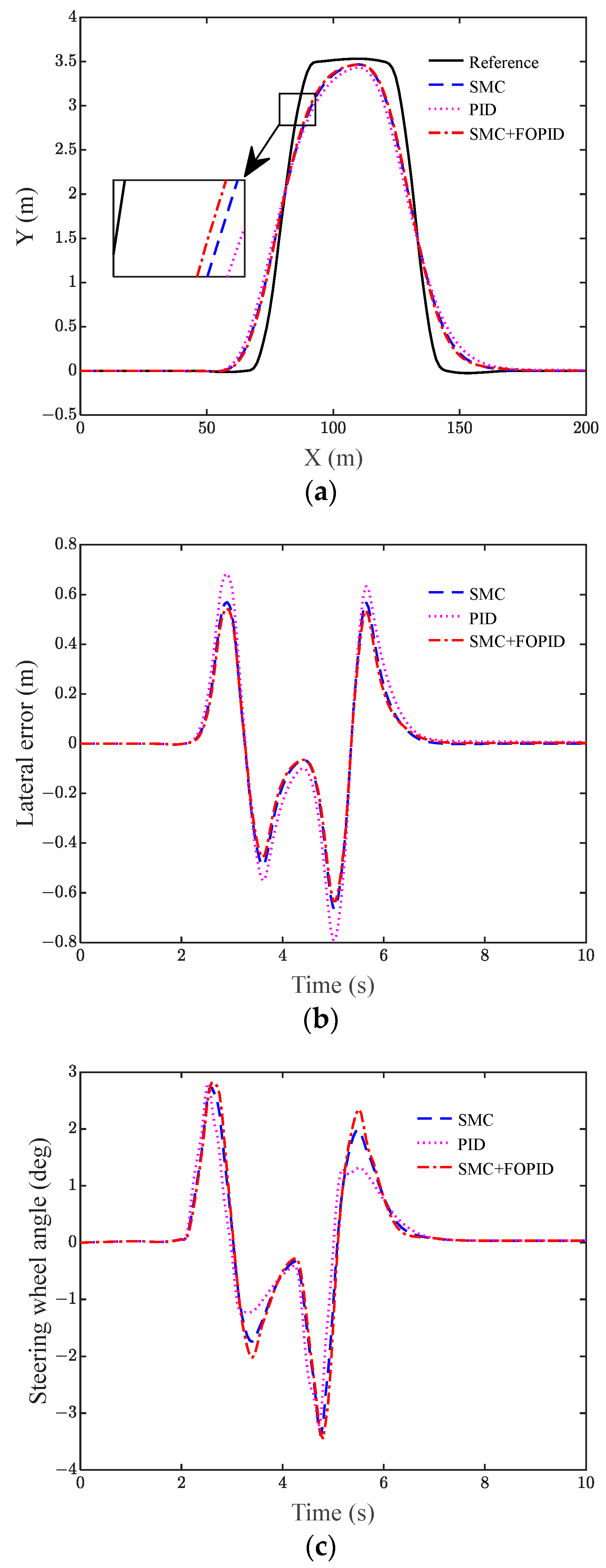
5.1. Simulation Verification under Different Speed Conditions
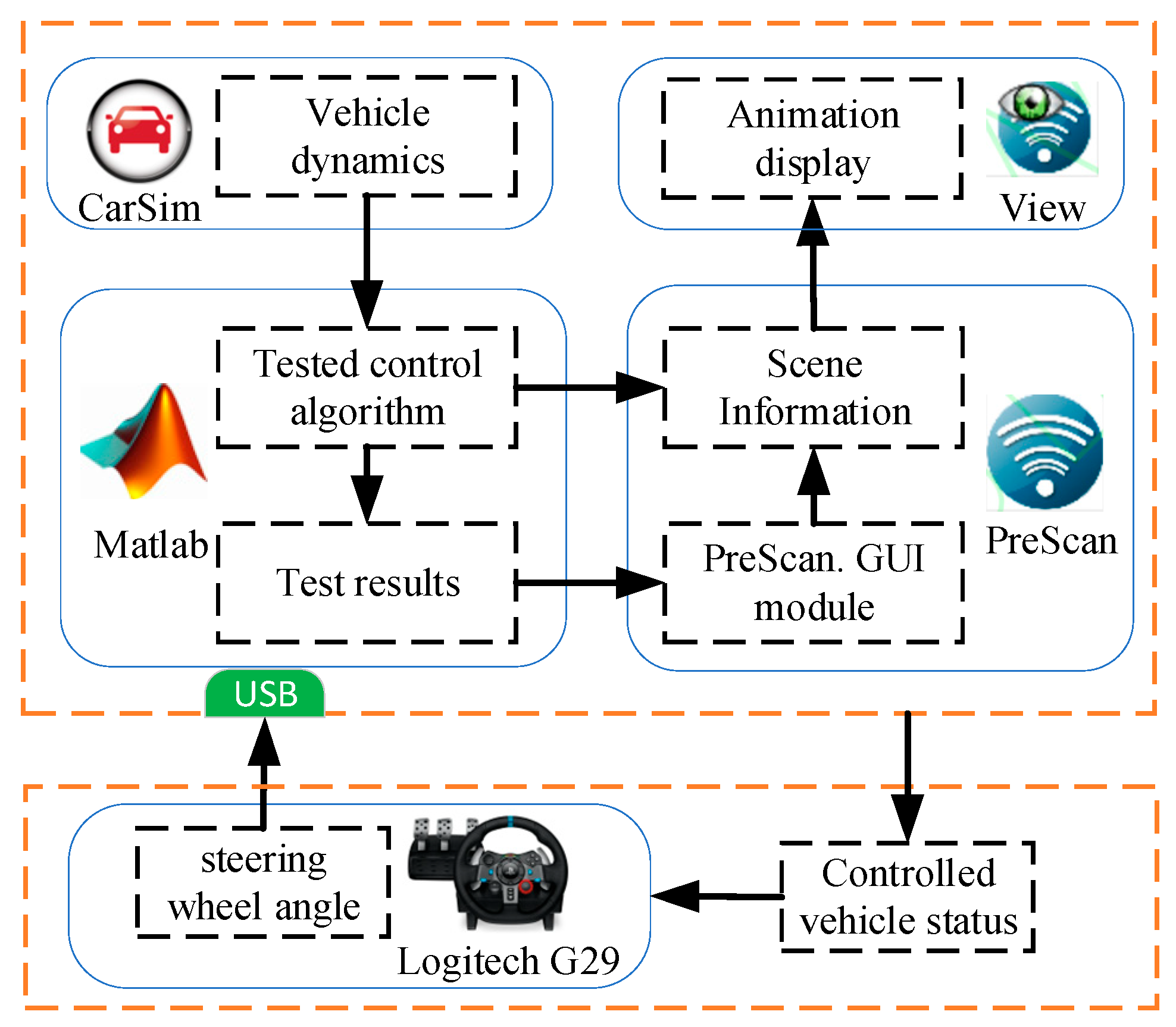
5.2. Hardware-in-the-Loop Test
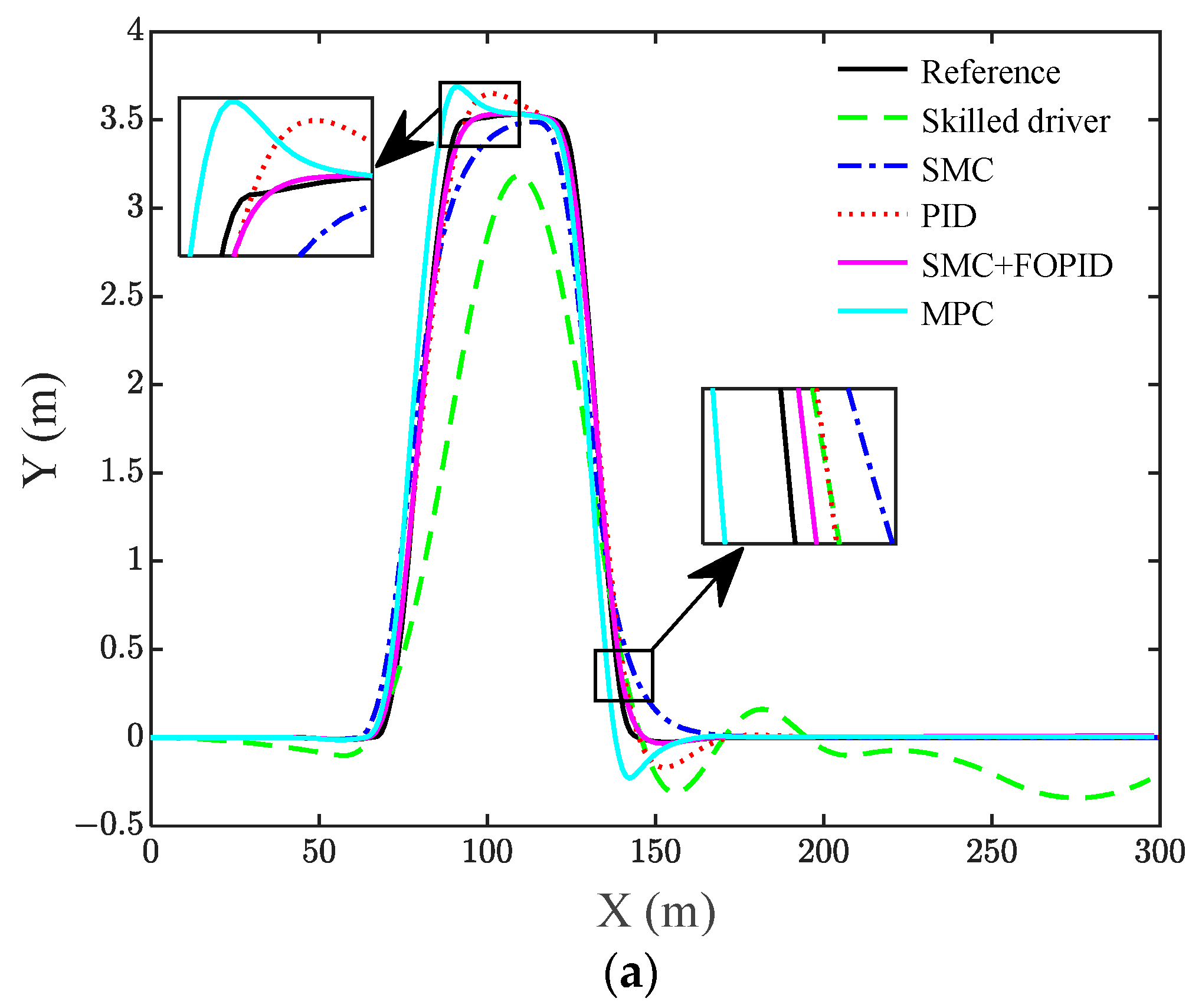
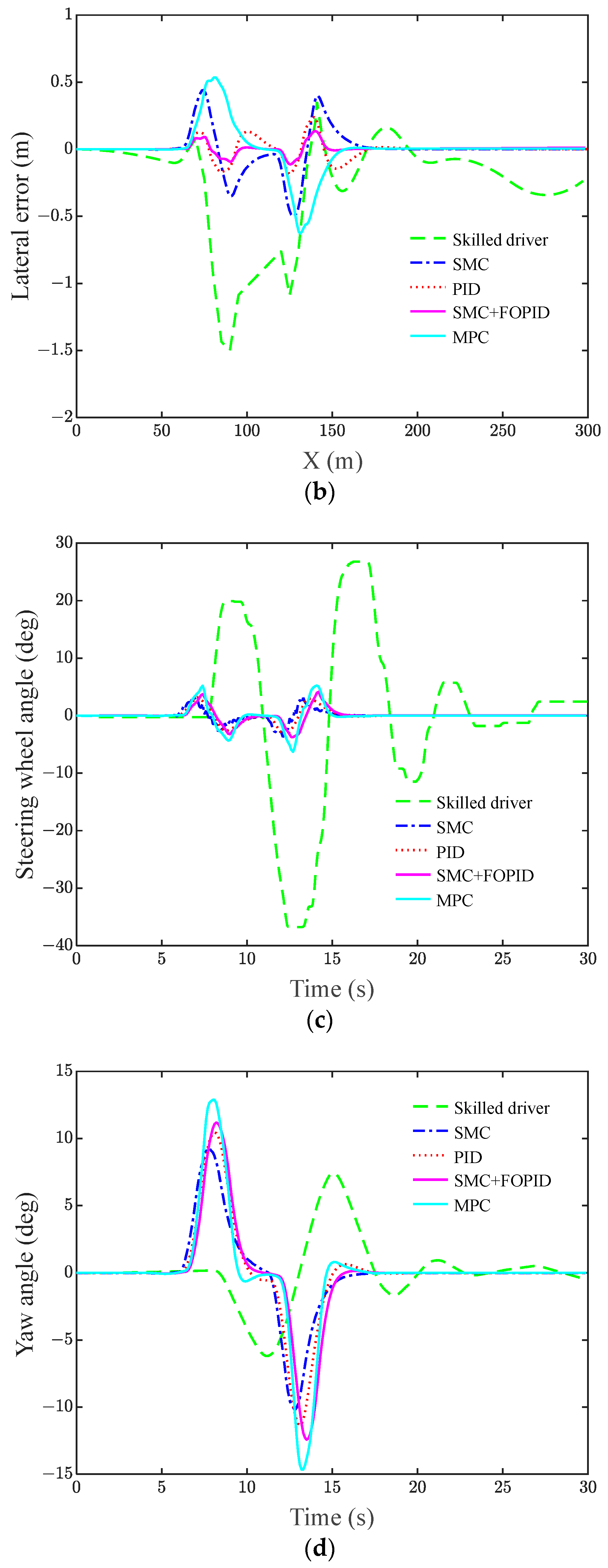
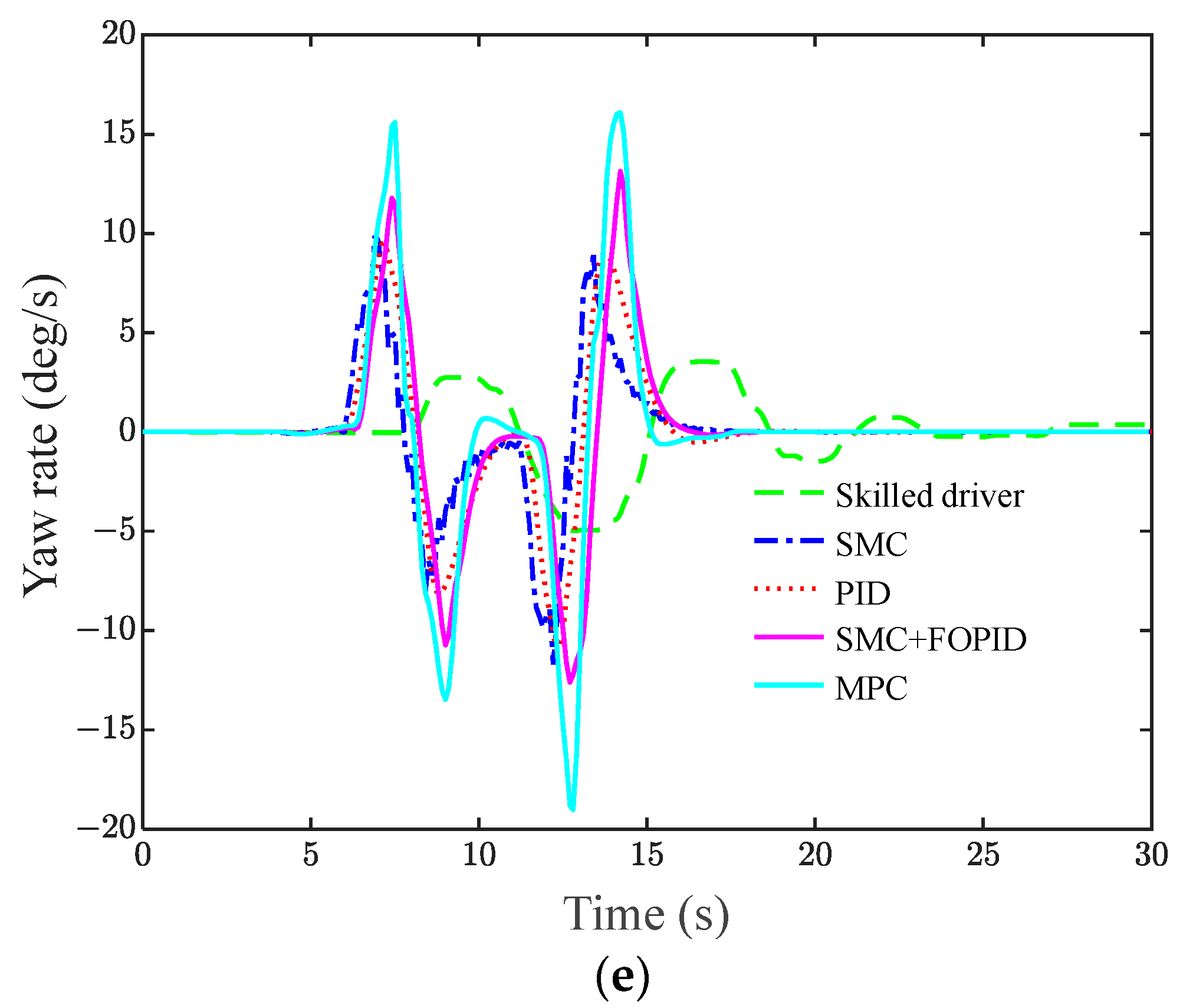
5.2.1. Double-Shifted Lane Condition Test
5.2.2. U-Shaped Road Test
6. Conclusions
- Based on a two-degree-of-freedom vehicle dynamics model and a single-point preview model, combined with the sliding mode control method and the fractional-order proportional-integral-differential control method, the lateral controller of self-driving vehicle trajectory tracking is designed.
- In the FOPID controller, the integral and derivative orders can be freely adjusted from 0 to 2, and the lag phase angle for fractional-order integrals and the overtravel phase angle for derivatives are extended from 0°~90° to 0°~180°. Memory functions for integral and derivative terms allow the system to realize more comprehensive parameter adjustments.
- Twelve real drivers are selected to perform directional control for the given road working conditions, and data are collected for comparison tests. Simulation tests are conducted for the four controllers to verify the actual control effect of the SMC + FOPID controller under lane change steering conditions at different speeds.
- The final simulation and hardware-in-the-loop test results show that the designed controller can make the self-driving vehicle not only have a high trajectory tracking accuracy, but also ensure the stability of the vehicle in driving.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| Derivative of the yaw angle rate | Derivative of the sideslip angle of the vehicle | ||
| Yaw rate of the vehicle | Sideslip angle | ||
| lf | Distances from the center of mass to the front axles | lr | Distances from the center of mass to the rear axles |
| Cf | Vehicle cornering stiffness of the front tire | Cr | Vehicle cornering stiffness of the rear tire |
| Front wheel angle of the vehicle | Vehicle rotational inertia around the z axis | ||
| vy | Vehicle lateral speed | vx | Vehicle longitudinal speed |
| Mass of the whole vehicle | Steady-state gain | ||
| Distance from the front axis to the rear axis | Stability factor | ||
| Ideal yaw rate | Form of the sliding mode surface | ||
| Gain of the sliding mode controller | Equivalent control quantity | ||
| Switching control quantity | System error | ||
| Kp | Proportional gains | Ki | Integral gains |
| Kd | Derivative gains | Integral order | |
| Derivative order | Ideal yaw rate compensation amounts | ||
| Integral of order with respect to the system error | Derivative of order with respect to the system error |
References
- Casau, P.; Sanfelice, R.G.; Cunha, R.; Cabecinhas, D.; Silvestre, C. Robust global trajectory tracking for a class of underactuated vehicles. Automatica 2015, 58, 90–98. [Google Scholar] [CrossRef]
- He, H.W.; Shi, M.; Li, J.W.; Cao, J.F.; Han, M. Design and experiential test of a model predictive path following control with adaptive preview for autonomous buses. Mech. Syst. Signal Proc. 2021, 157, 20. [Google Scholar] [CrossRef]
- Hu, X.S.; Wang, H.; Tang, X.L. Cyber-Physical Control for Energy-Saving Vehicle Following With Connectivity. IEEE Trans. Ind. Electron. 2017, 64, 8578–8587. [Google Scholar] [CrossRef]
- Paden, B.; Cap, M.; Yong, S.Z.; Yershov, D.; Frazzoli, E. A Survey of Motion Planning and Control Techniques for Self-Driving Urban Vehicles. IEEE Trans. Intell. Veh. 2016, 1, 33–55. [Google Scholar] [CrossRef]
- Funke, J.; Brown, M.; Erlien, S.M.; Gerdes, J.C. Collision Avoidance and Stabilization for Autonomous Vehicles in Emergency Scenarios. IEEE Trans. Control Syst. Technol. 2017, 25, 1204–1216. [Google Scholar] [CrossRef]
- Shen, Z.X.; Ma, Y.P.; Song, Y.D. Robust Adaptive Fault-Tolerant Control of Mobile Robots With Varying Center of Mass. IEEE Trans. Ind. Electron. 2018, 65, 2419–2428. [Google Scholar] [CrossRef]
- Ando, T.; Kugimiya, W.; Hashimoto, T.; Momiyama, F.; Aoki, K.; Nakano, K. Lateral Control in Precision Docking Using RTK-GNSS/INS and LiDAR for Localization. IEEE Trans. Intell. Veh. 2021, 6, 78–87. [Google Scholar] [CrossRef]
- Liu, Y.; Zong, C.F.; Zhang, D. Lateral control system for vehicle platoon considering vehicle dynamic characteristics. IET Intell. Transp. Syst. 2019, 13, 1356–1364. [Google Scholar] [CrossRef]
- Fraikin, N.; Funk, K.; Frey, M.; Gauterin, F. A fast and accurate hybrid simulation model for the large-scale testing of automated driving functions. Proc. Inst. Mech. Eng. Part D-J. Automob. Eng. 2020, 234, 1183–1196. [Google Scholar] [CrossRef]
- Guo, H.Y.; Liu, J.; Cao, D.P.; Chen, H.; Yu, R.; Lv, C. Dual-envelop-oriented moving horizon path tracking control for fully automated vehicles. Mechatronics 2018, 50, 422–433. [Google Scholar] [CrossRef]
- Lin, F.; Zhang, Y.W.; Zhao, Y.Q.; Yin, G.D.; Zhang, H.Q.; Wang, K.Z. Trajectory Tracking of Autonomous Vehicle with the Fusion of DYC and Longitudinal-Lateral Control. Chin. J. Mech. Eng. 2019, 32, 16. [Google Scholar] [CrossRef]
- Xu, S.B.; Peng, H.E. Design, Analysis, and Experiments of Preview Path Tracking Control for Autonomous Vehicles. IEEE Trans. Intell. Transp. Syst. 2020, 21, 48–58. [Google Scholar] [CrossRef]
- Zhang, C.Y.; Chu, D.F.; Liu, S.D.; Deng, Z.J.; Wu, C.Z.; Su, X.C. Trajectory Planning and Tracking for Autonomous Vehicle Based on State Lattice and Model Predictive Control. IEEE Intell. Transp. Syst. Mag. 2019, 11, 29–40. [Google Scholar] [CrossRef]
- Li, R.; Ouyang, Q.; Cui, Y.; Jin, Y. Preview Control with Dynamic Constraints for Autonomous Vehicles. Sensors 2021, 21, 5155. [Google Scholar] [CrossRef]
- Mata, S.; Zubizarreta, A.; Pinto, C. Robust Tube-Based Model Predictive Control for Lateral Path Tracking. IEEE Trans. Intell. Veh. 2019, 4, 569–577. [Google Scholar] [CrossRef]
- Yang, T.; Bai, Z.W.; Li, Z.Q.; Feng, N.L.; Chen, L.Q. Intelligent Vehicle Lateral Control Method Based on Feedforward. Actuators 2021, 10, 228. [Google Scholar] [CrossRef]
- Chen, G.Y.; Yao, J.; Hu, H.Y.; Gao, Z.H.; He, L.; Zheng, X.L. Design and experimental evaluation of an efficient MPC-based lateral motion controller considering path preview for autonomous vehicles. Control Eng. Pract. 2022, 123, 17. [Google Scholar] [CrossRef]
- Awad, N.; Lasheen, A.; Elnaggar, M.; Kamel, A. Model predictive control with fuzzy logic switching for path tracking of autonomous vehicles. ISA Trans. 2022, 129, 193–205. [Google Scholar] [CrossRef]
- Sun, Y.G.; Xu, J.Q.; Lin, G.B.; Ji, W.; Wang, L.K. RBF Neural Network-Based Supervisor Control for Maglev Vehicles on an Elastic Track With Network Time Delay. IEEE Trans. Ind. Inform. 2022, 18, 509–519. [Google Scholar] [CrossRef]
- Xavier, N.; Bandyopadhyay, B. Practical Sliding Mode Using State Depended Intermittent Control. IEEE Trans. Circuits Syst. II-Express Briefs 2021, 68, 341–345. [Google Scholar] [CrossRef]
- Sun, Y.G.; Xu, J.Q.; Wu, H.; Lin, G.B.; Mumtaz, S. Deep Learning Based Semi-Supervised Control for Vertical Security of Maglev Vehicle With Guaranteed Bounded Airgap. IEEE Trans. Intell. Transp. Syst. 2021, 22, 4431–4442. [Google Scholar] [CrossRef]
- Deng, Y.F.; Wang, J.L.; Li, H.W.; Liu, J.; Tian, D.P. Adaptive sliding mode current control with sliding mode disturbance observer for PMSM drives. ISA Trans. 2019, 88, 113–126. [Google Scholar] [CrossRef] [PubMed]
- Karami-Mollaee, A.; Shojaei, A.A.; Barambones, O.; Othman, M.F. Dynamic sliding mode control of pitch blade wind turbine using sliding mode observer. Trans. Inst. Meas. Control 2022, 44, 3028–3038. [Google Scholar] [CrossRef]
- Xiao, H.L.; Zhao, D.Y.; Gao, S.L.; Spurgeon, S.K. Sliding mode predictive control: A survey. Annu. Rev. Control 2022, 54, 148–166. [Google Scholar] [CrossRef]
- Khan, O.; Pervaiz, M.; Ahmad, E.; Iqbal, J. On the derivation of novel model and sophisticated control of flexible joint manipulator. Rev. Roum. Sci. Tech.-Ser. Electron. 2017, 62, 103–108. [Google Scholar]
- Ullah, M.I.; Ajwad, S.A.; Irfan, M.; Iqbal, J. Non-linear Control Law for Articulated Serial Manipulators: Simulation Augmented with Hardware Implementation. Elektron. Elektrotech. 2016, 22, 3–7. [Google Scholar] [CrossRef]
- Imine, H.; Madani, T. Sliding-mode control for automated lane guidance of heavy vehicle. Int. J. Robust Nonlinear Control 2013, 23, 67–76. [Google Scholar] [CrossRef]
- Xu, T.; Liu, Y.L.; Cao, X.H.; Ji, X.W. Cascaded Steering Control Paradigm for the Lateral Automation of Heavy Commercial Vehicles. IEEE Trans. Transp. Electrif. 2022, 8, 2346–2360. [Google Scholar] [CrossRef]
- Incremona, G.P.; Rubagotti, M.; Ferrara, A. Sliding Mode Control of Constrained Nonlinear Systems. IEEE Trans. Autom. Control 2017, 62, 2965–2972. [Google Scholar] [CrossRef]
- Yin, C.Q.; Wang, S.R.; Li, X.W.; Yuan, G.H.; Jiang, C. Trajectory Tracking Based on Adaptive Sliding Mode Control for Agricultural Tractor. IEEE Access 2020, 8, 113021–113029. [Google Scholar] [CrossRef]
- Xia, Q.; Chen, L.; Xu, X.; Cai, Y.F.; Jiang, H.B.; Pan, G.X. Expected yaw rate-based trajectory tracking control with vision delay for intelligent vehicle. Sci. Prog. 2020, 103, 23. [Google Scholar] [CrossRef] [PubMed]
- Lucet, E.; Lenain, R.; Grand, C. Dynamic path tracking control of a vehicle on slippery terrain. Control Eng. Pract. 2015, 42, 60–73. [Google Scholar] [CrossRef]
- Tian, Y.; Yao, Q.Q.; Hang, P.; Wang, S.Y. Adaptive Coordinated Path Tracking Control Strategy for Autonomous Vehicles with Direct Yaw Moment Control. Chin. J. Mech. Eng. 2022, 35, 15. [Google Scholar] [CrossRef]
- Tagne, G.; Talj, R.; Charara, A. Design and validation of a robust immersion and invariance controller for the lateral dynamics of intelligent vehicles. Control Eng. Pract. 2015, 40, 81–92. [Google Scholar] [CrossRef]
- Bashir, A.O.; Rui, X.T.; Abbas, L.K.; Zhang, J.S. Ride Comfort Enhancement of Semi-active Vehicle Suspension Based on SMC with PID Sliding Surface Parameters Tuning using PSO. Control Eng. Appl. Inform. 2019, 21, 51–62. [Google Scholar]
- Sabiha, A.D.; Kamel, M.A.; Said, E.; Hussein, W.M. ROS-based trajectory tracking control for autonomous tracked vehicle using optimized backstepping and sliding mode control. Robot. Auton. Syst. 2022, 152, 15. [Google Scholar] [CrossRef]
- Ghorbani, M.; Tepljakov, A.; Petlenkov, E. Stabilizing region of fractional-order proportional integral derivative controllers for interval delayed fractional-order plants. Asian J. Control 2023, 25, 1145–1155. [Google Scholar] [CrossRef]
- Yaghooti, B.; Salarieh, H. Robust adaptive fractional order proportional integral derivative controller design for uncertain fractional order nonlinear systems using sliding mode control. Proc. Inst. Mech. Eng. Part I-J. Syst. Control Eng. 2018, 232, 550–557. [Google Scholar] [CrossRef]
- ISO 3888-1:2018; Passenger Cars–Test Track for a Severe Lane-Change Manoeuvre–Part 1: Double Lane-Change. International Organization for Standardization: Geneva, Switzerland, 2018. Available online: https://standards.iteh.ai/catalog/standards/sist/68904d81-f17d-4dda-914f-3232b576ddeb/iso-3888-1-2018 (accessed on 9 December 2023).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Units | Values |
|---|---|---|
| Vehicle weight () | kg | 1273 |
| Moment of inertia about Z axis () | kg·m2 | 1523 |
| Distance from centroid to front axle () | m | 1.016 |
| Distance from centroid to rear axle () | m | 1.562 |
| Cornering stiffness of the front tire () | N·rad−1 | 108,861 |
| Cornering stiffness of the rear tire () | N·rad−1 | 108,861 |
| Steering system conventional ratio () | - | 17.6 |
| Velocity (km/h) | Root Mean Square of Lateral Error (m) | Max Lateral Error (m) | ||||
|---|---|---|---|---|---|---|
| SMC | PID | SMC + FOPID | SMC | PID | SMC + FOPID | |
| 30 | 0.031 | 0.044 | 0.029 | 0.101 | 0.132 | 0.098 |
| 60 | 0.094 | 0.142 | 0.072 | 0.339 | 0.389 | 0.273 |
| 90 | 0.220 | 0.263 | 0.207 | 0.570 | 0.684 | 0.544 |
| Controller Type | Root Mean Square of Lateral Error (m) | Max Lateral Error (m) |
|---|---|---|
| Skilled drivers | 0.136 | 1.501 |
| SMC | 0.202 | 0.503 |
| PID | 0.099 | 0.239 |
| SMC + FOPID | 0.016 | 0.139 |
| MPC | 0.074 | 0.627 |
| Controller Type | Root Mean Square of Lateral Error (m) | Max Lateral Error (m) |
|---|---|---|
| Skilled drivers | 1.457 | 3.693 |
| SMC | 0.025 | 0.087 |
| PID | 0.154 | 0.512 |
| SMC + FOPID | 0.011 | 0.051 |
| MPC | 0.113 | 0.426 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, X.; Li, J.; Ma, Z.; Chen, D.; Zhou, X. Lateral Trajectory Tracking of Self-Driving Vehicles Based on Sliding Mode and Fractional-Order Proportional-Integral-Derivative Control. Actuators 2024, 13, 7. https://doi.org/10.3390/act13010007
Zhang X, Li J, Ma Z, Chen D, Zhou X. Lateral Trajectory Tracking of Self-Driving Vehicles Based on Sliding Mode and Fractional-Order Proportional-Integral-Derivative Control. Actuators. 2024; 13(1):7. https://doi.org/10.3390/act13010007
Chicago/Turabian StyleZhang, Xiqing, Jin Li, Zhiguang Ma, Dianmin Chen, and Xiaoxu Zhou. 2024. "Lateral Trajectory Tracking of Self-Driving Vehicles Based on Sliding Mode and Fractional-Order Proportional-Integral-Derivative Control" Actuators 13, no. 1: 7. https://doi.org/10.3390/act13010007
APA StyleZhang, X., Li, J., Ma, Z., Chen, D., & Zhou, X. (2024). Lateral Trajectory Tracking of Self-Driving Vehicles Based on Sliding Mode and Fractional-Order Proportional-Integral-Derivative Control. Actuators, 13(1), 7. https://doi.org/10.3390/act13010007