Investigation of a Haptic Actuator Made with Magneto-Rheological Fluids for Haptic Shoes Applications




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Design of an MR Actuator with a Movable Piston
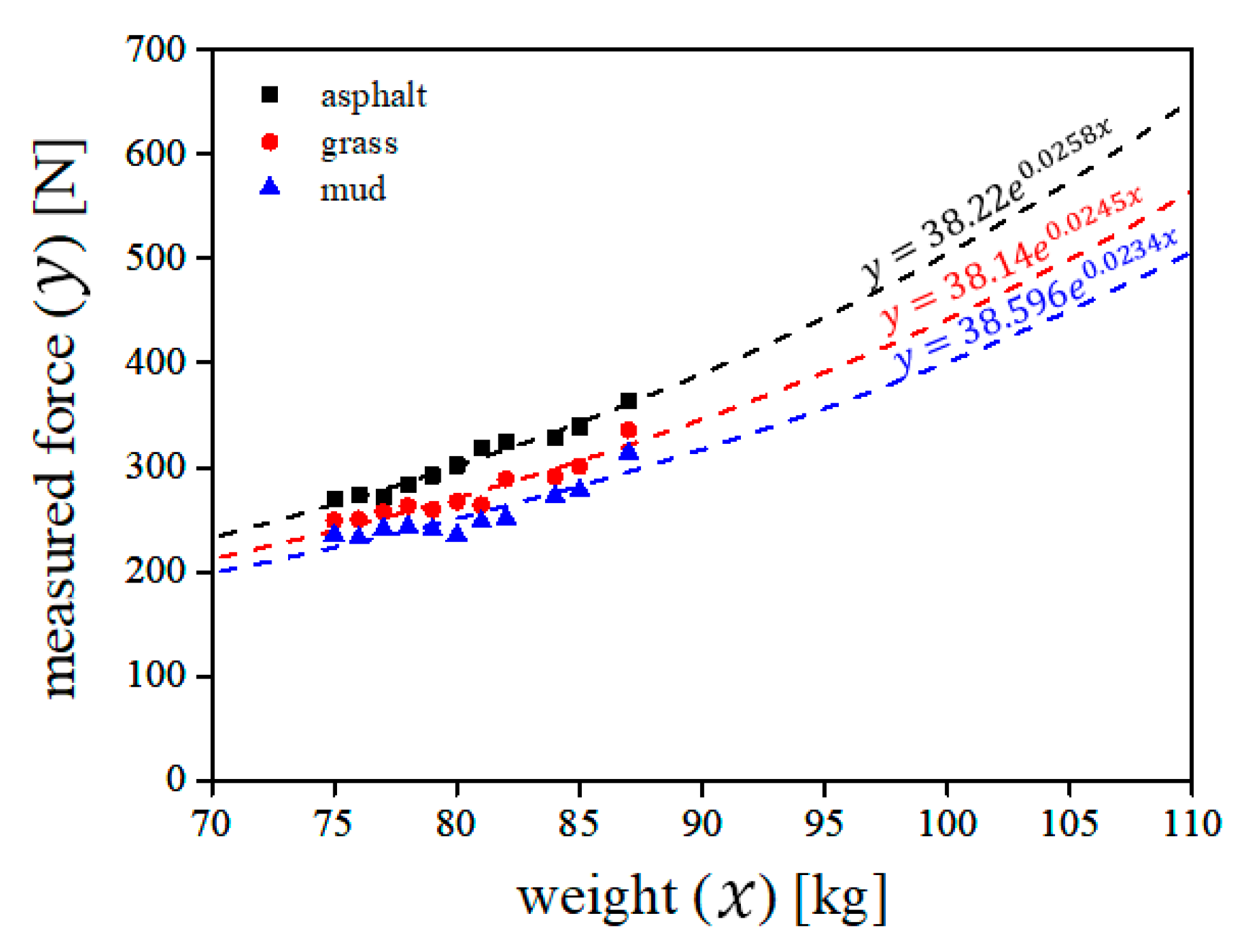
2.1. Preliminary Experiment
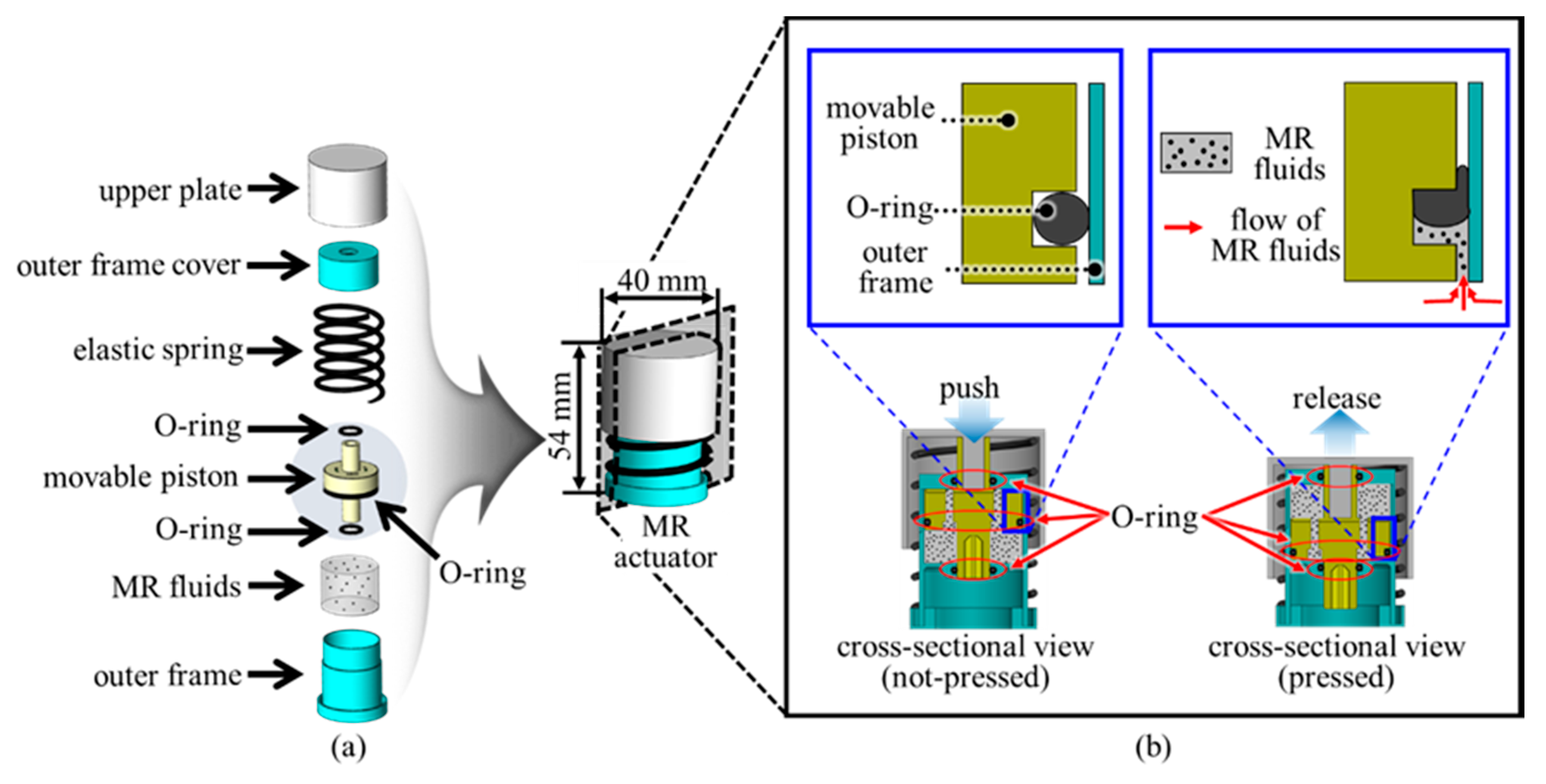
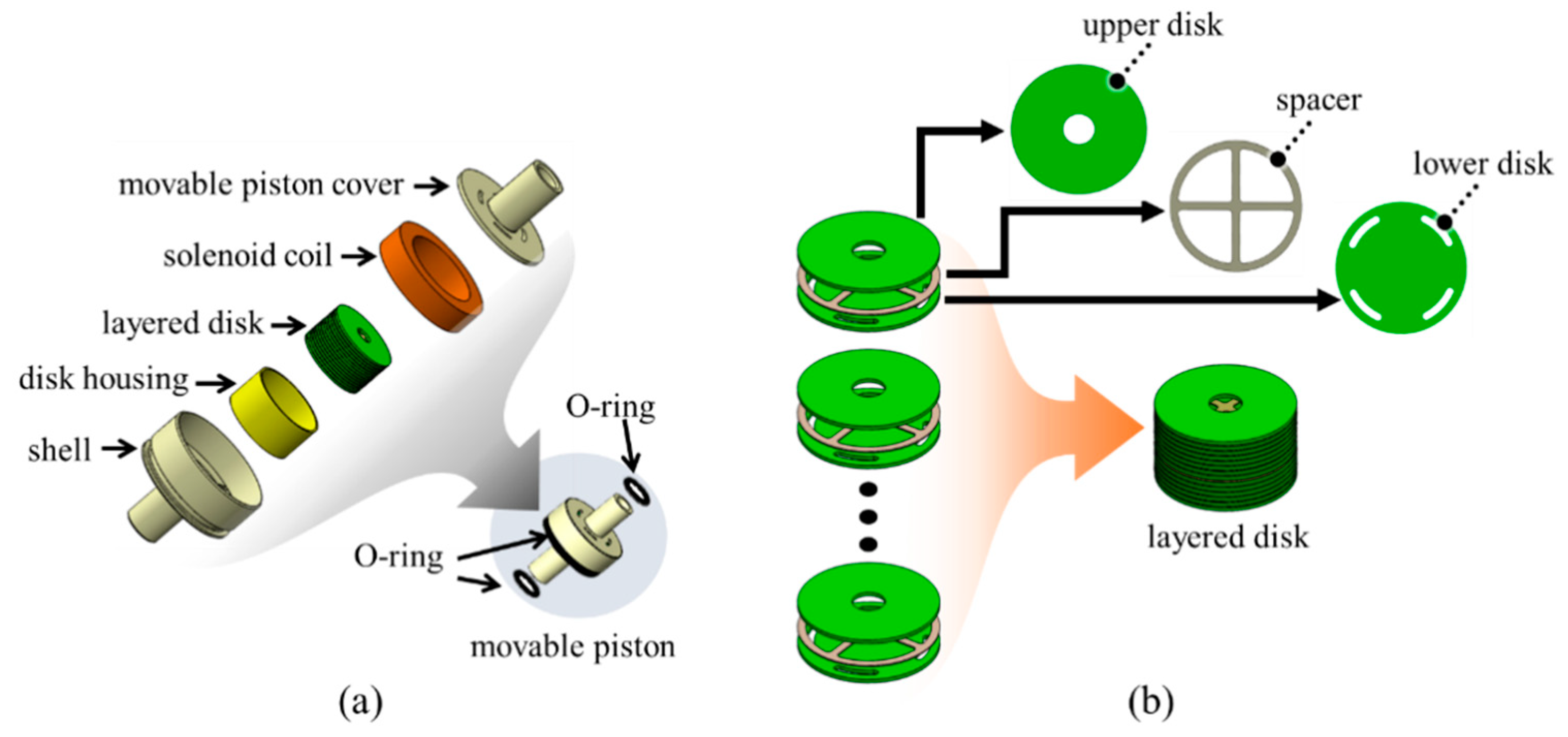
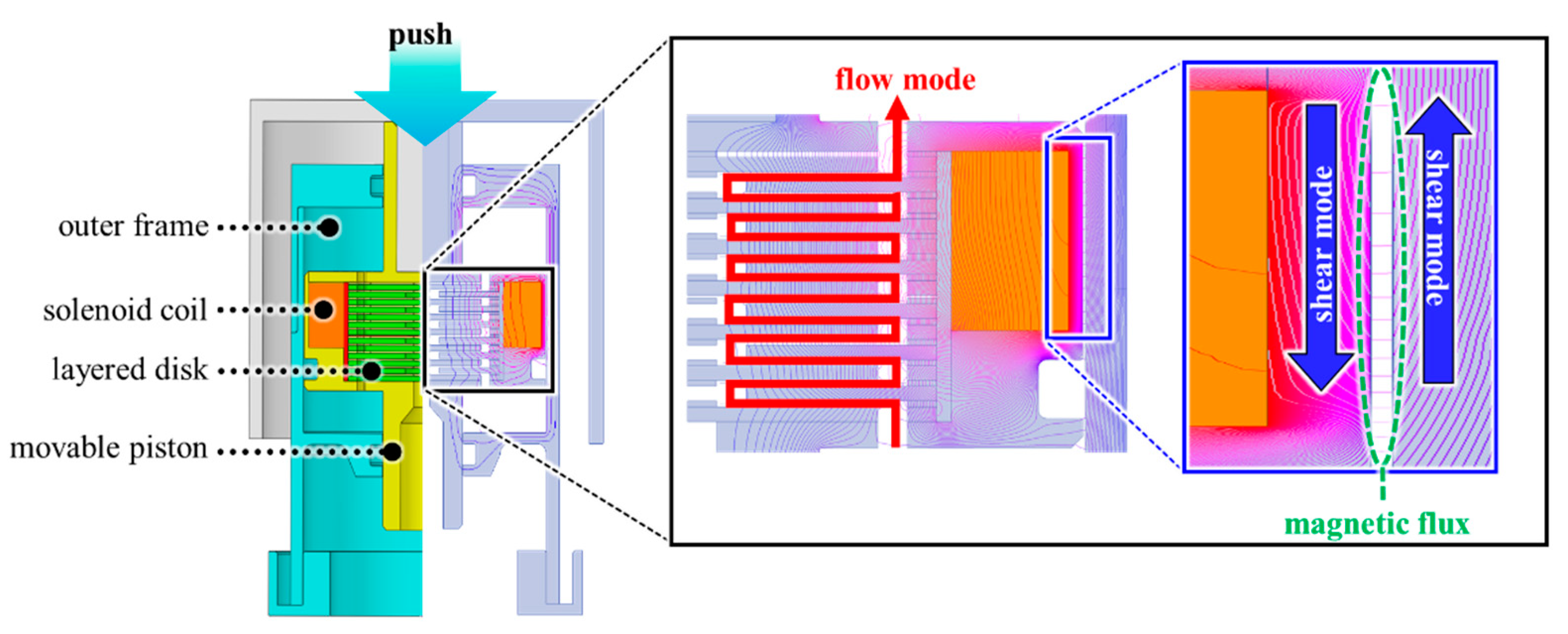
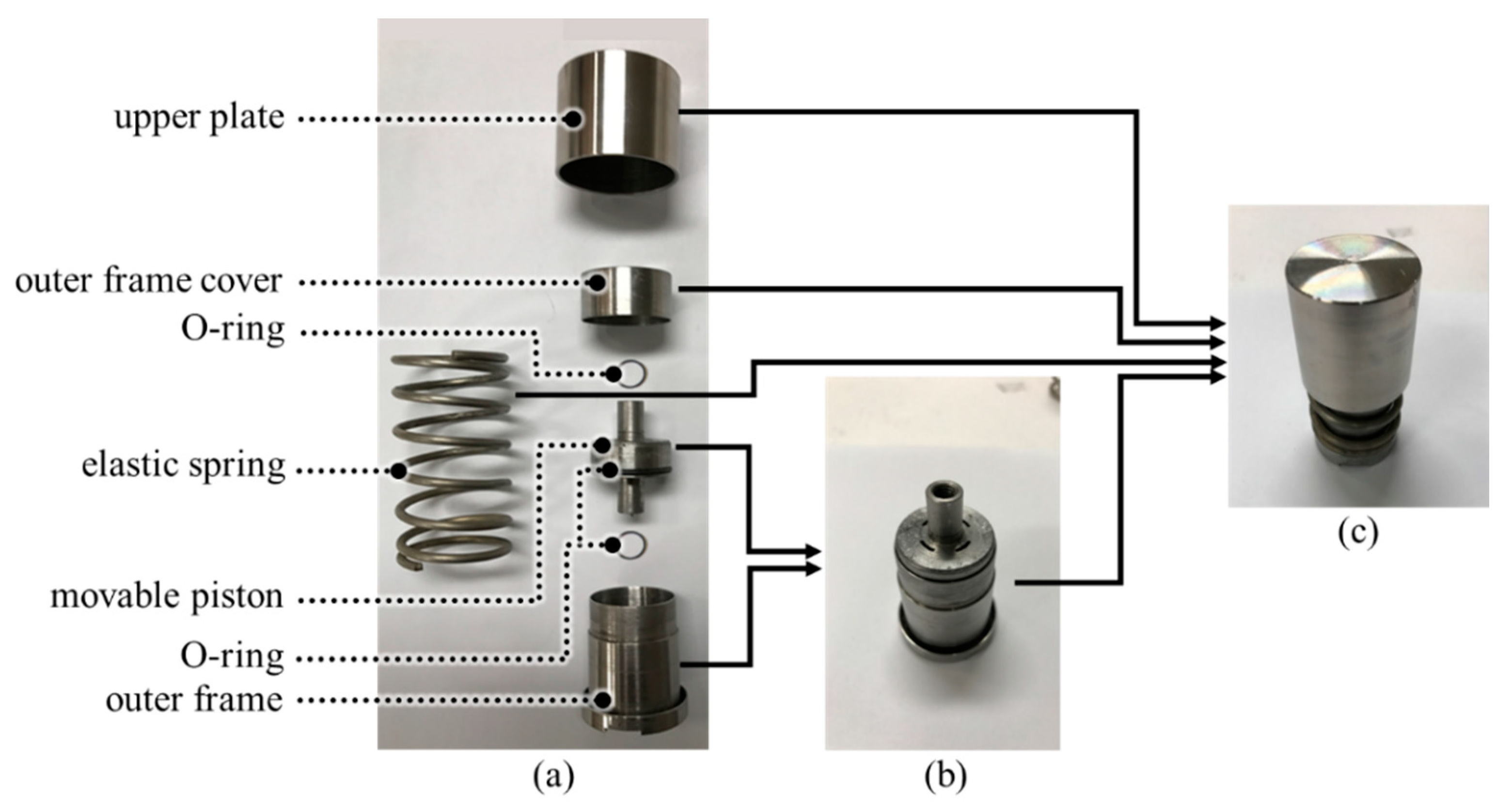
2.2. Structure of the Proposed Actuator
3. Optimal Design of an MR Actuator with a Movable Piston
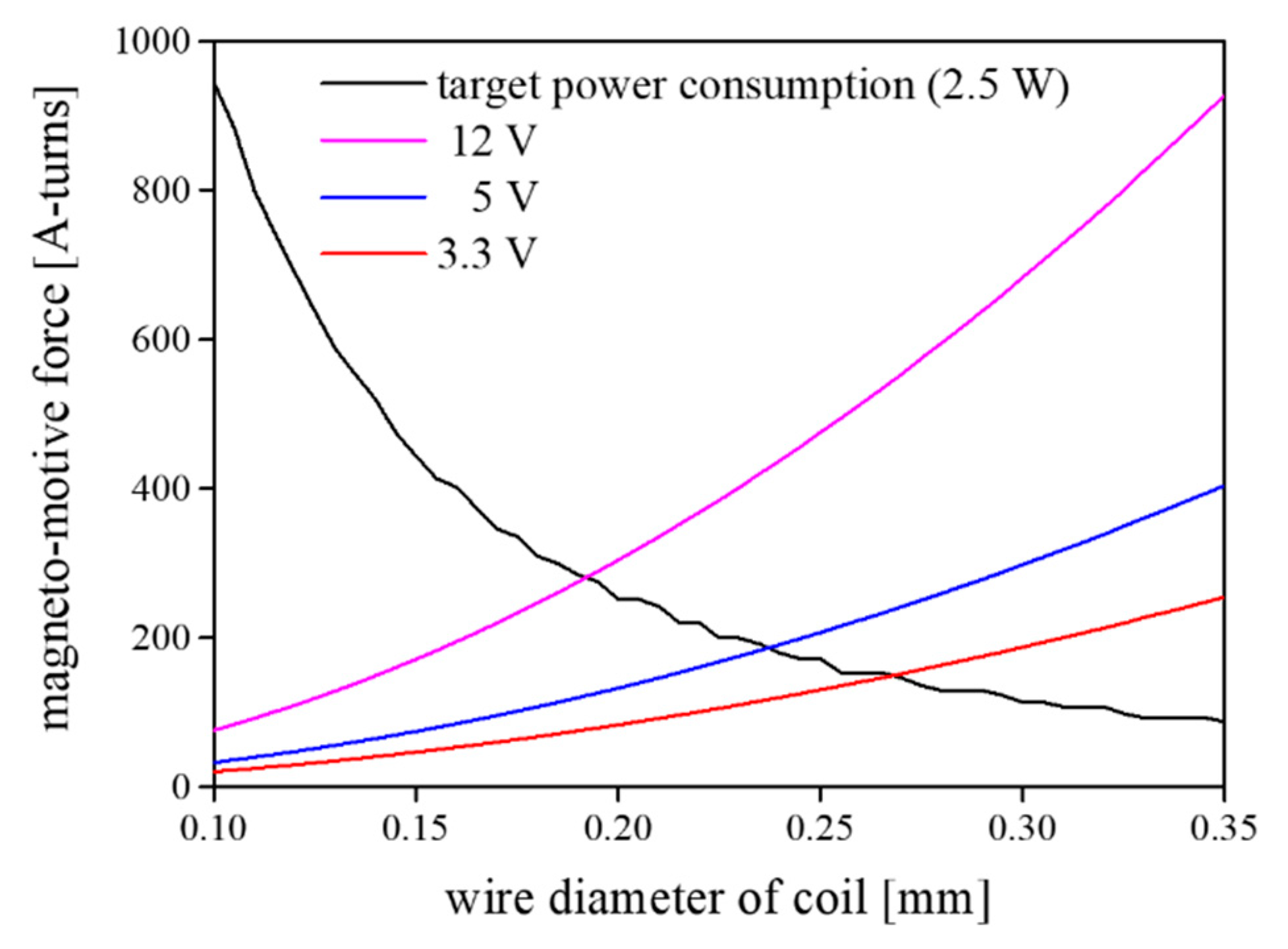
3.1. Optimal Design of the Proposed Actuator
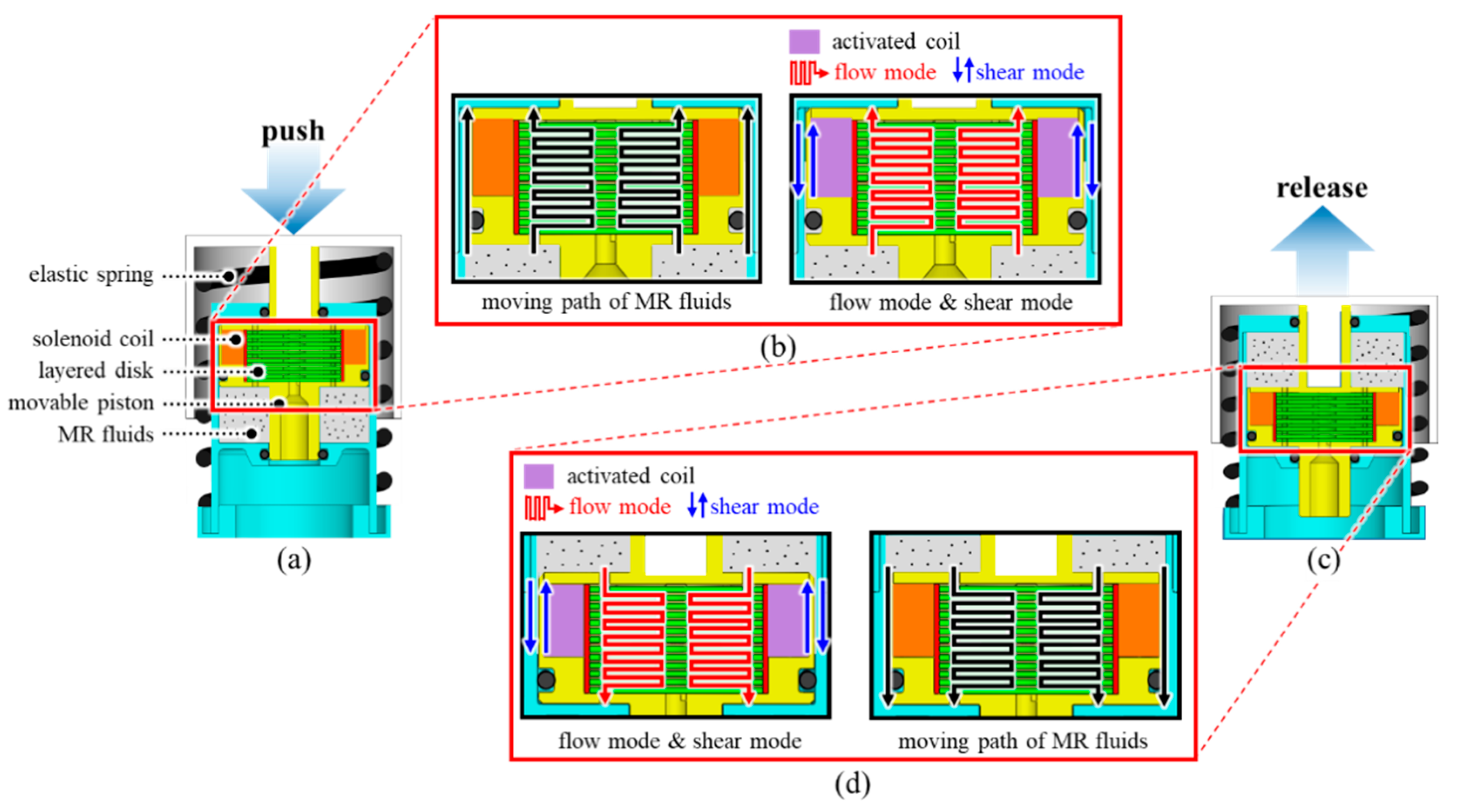
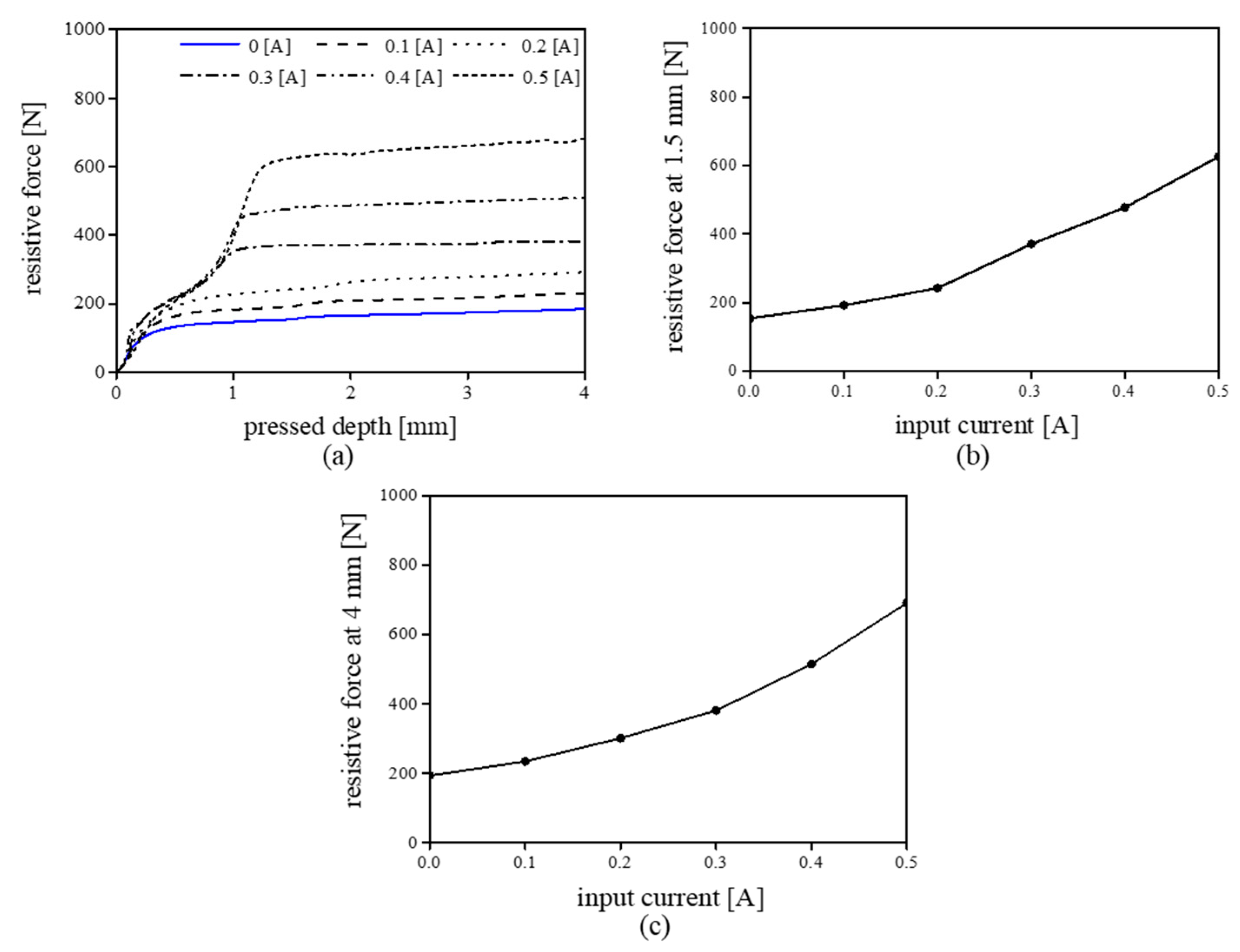
3.2. Simulation of the Proposed Actuator
- u:
- plastic viscosity (0.28 [Pa·s]),
- Afl:
- area of the layered disk (300.25 [𝛑·mm2]),
- bfl:
- circumference of a disk (11 [𝛑·mm]),
- bsh:
- circumference of the movable piston (27 [𝛑·mm]),
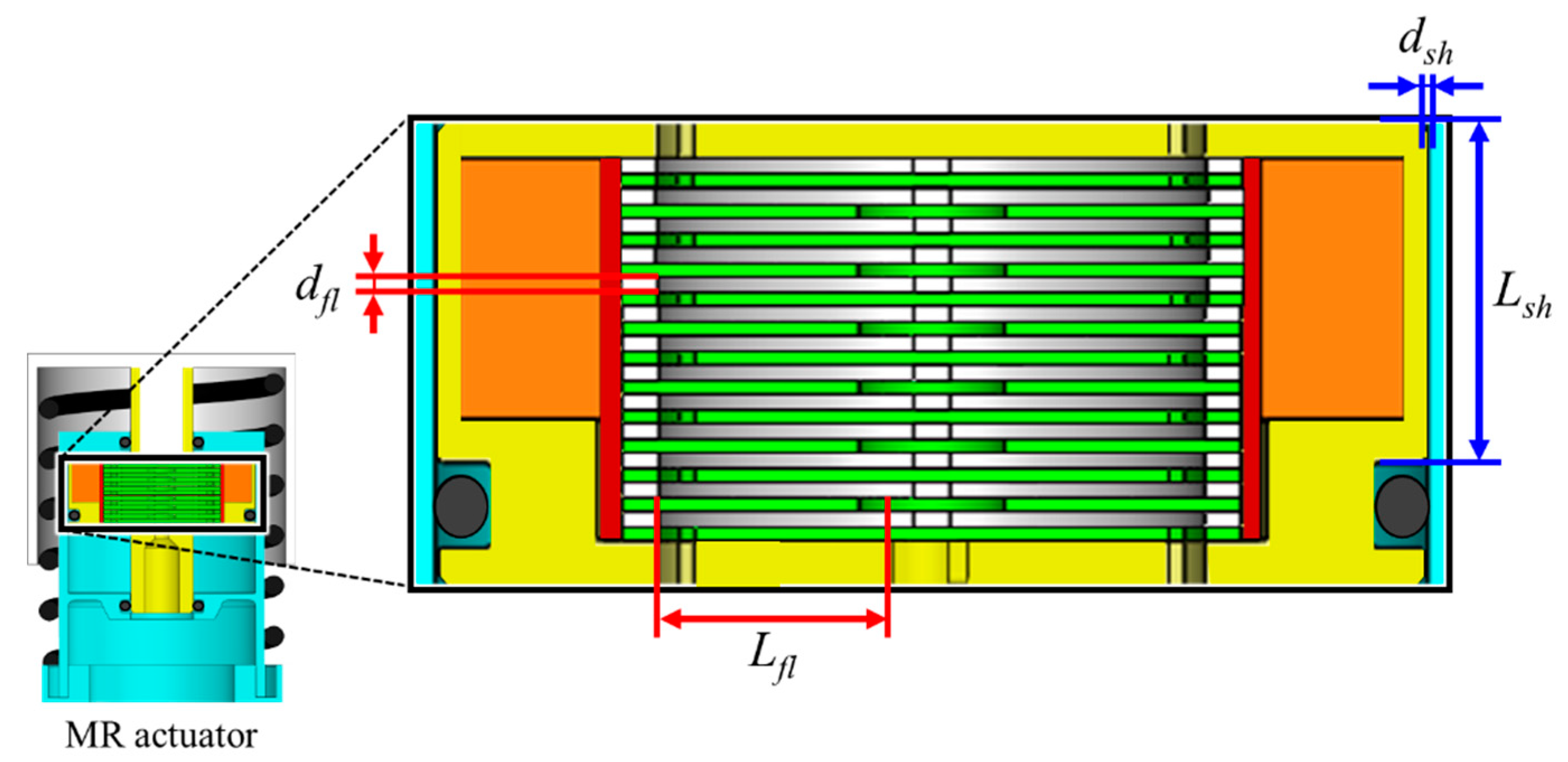
- dfl:
- gap between a disk and its neighbor (0.2 [mm]) (Figure 8),
- dsh:
- dsh: gap between the outer frame and the movable piston (0.1 [mm]) (Figure 8),
- Lfl:
- distance that MR fluids flow in the gap (5.5 [mm]) (Figure 8),
- Lsh:
- distance that MR fluids move for shear mode (11.1 [mm]) (Figure 8),
- :
- velocity of movable piston,
- σ:
- yield stress.
4. Fabrication and Result of the Proposed Haptic Actuator
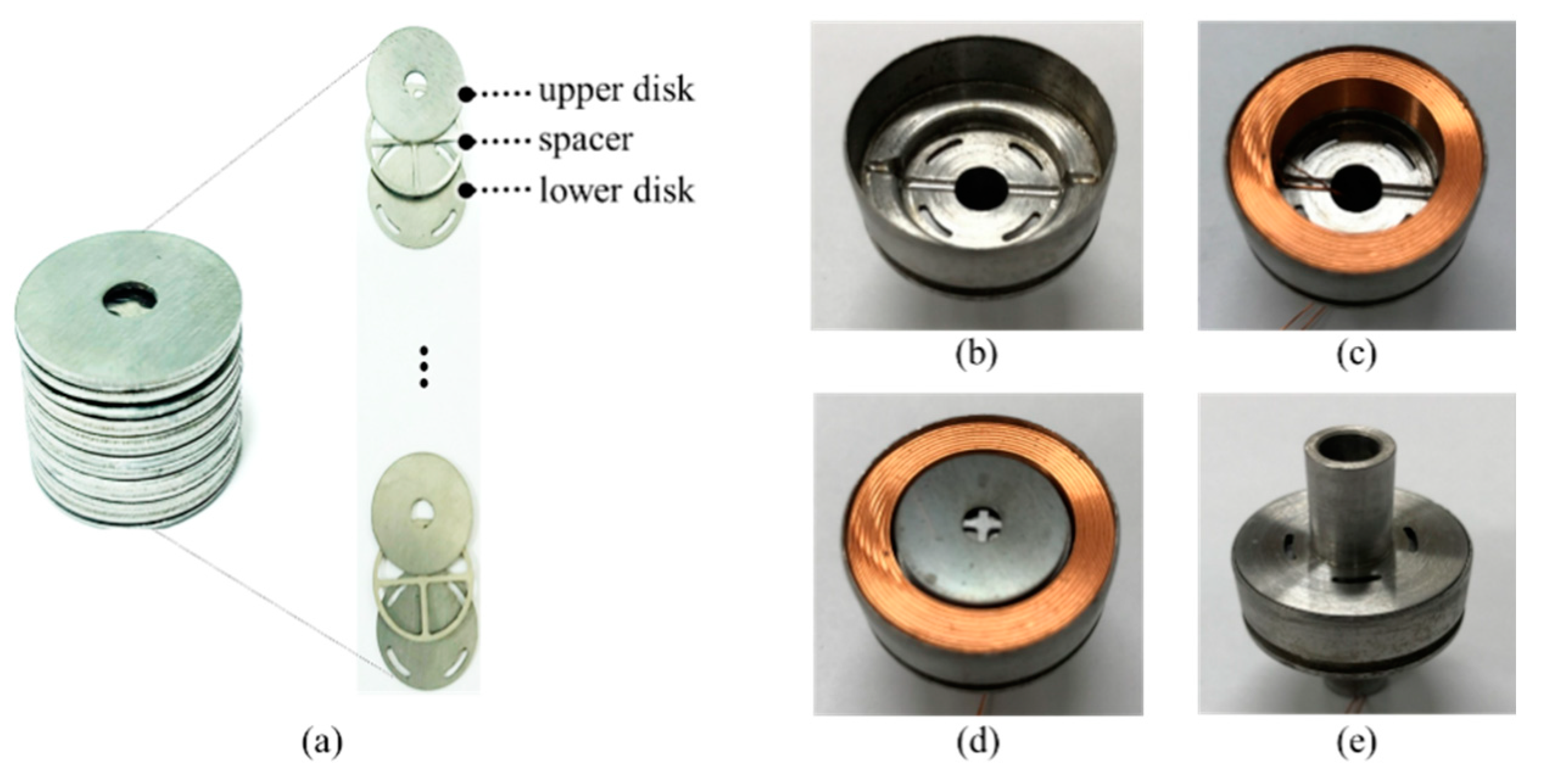
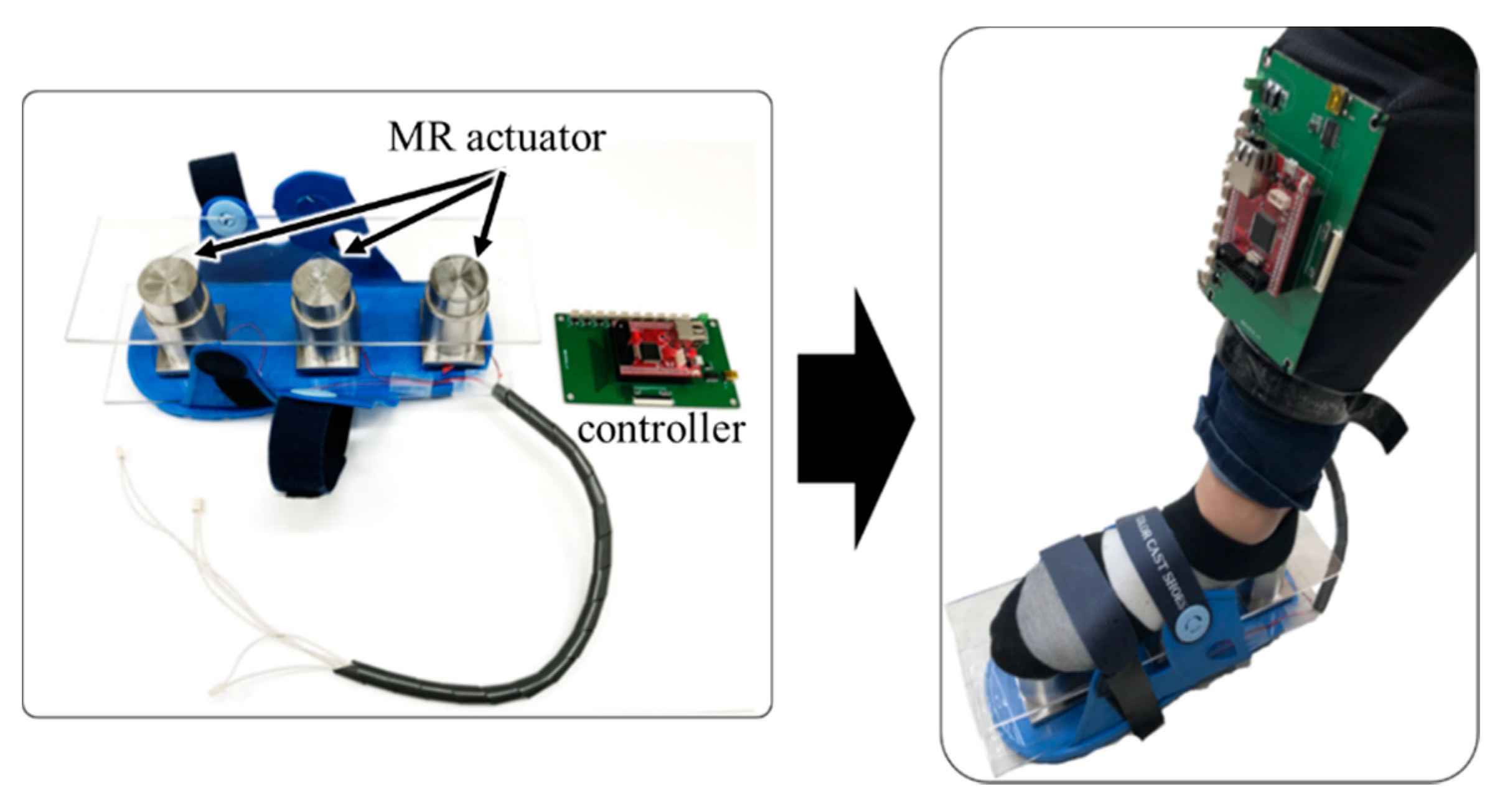
4.1. Fabricated Haptic Actuator
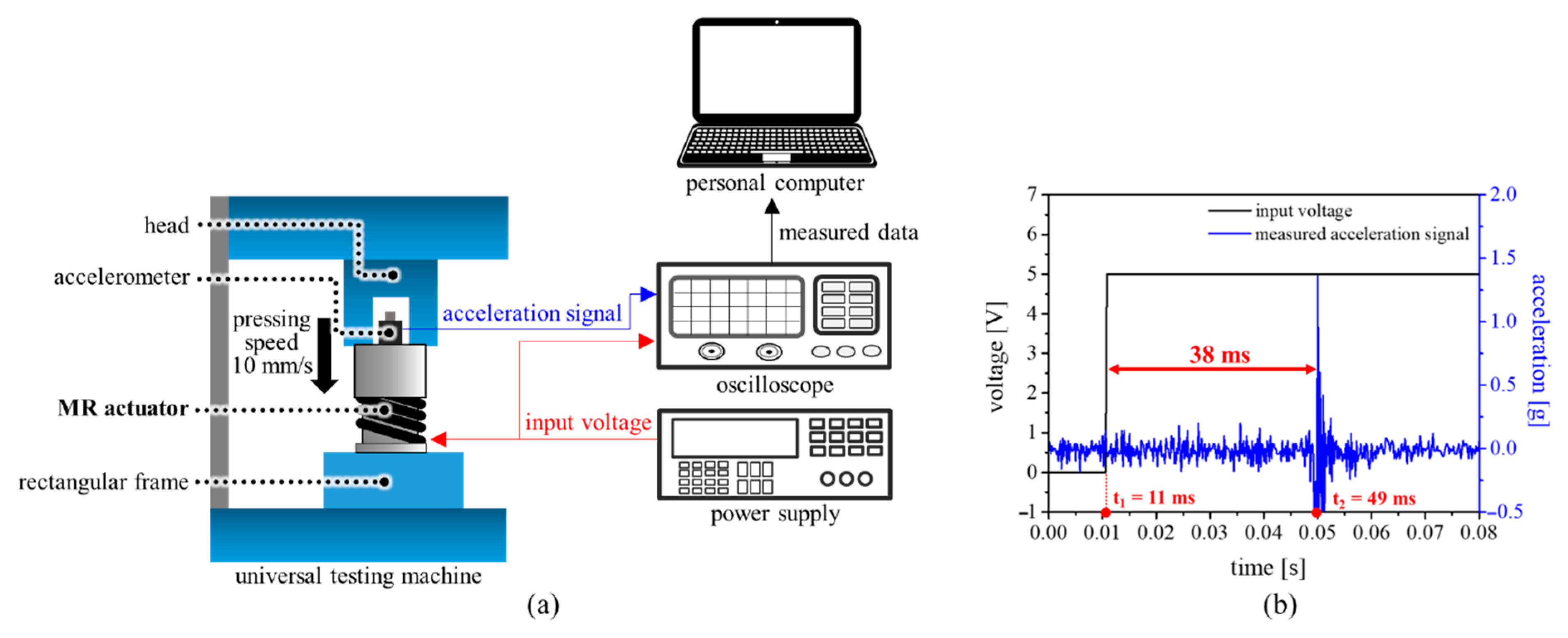
4.2. Experimental Result
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Serafin, S.; Turchet, L.; Nordahl, R.; Dimitrov, S.; Berrezag, A.; Hayward, V. Identification of Virtual Grounds using Virtual Reality Haptic Shoes and Sound Synthesis. In Proceedings of the Eurohaptics Symposium on Haptic and Audio-Visual Stimuli: Enhancing Experiences and Interaction, Amsterdam, The Netherlands, 7 July 2010. [Google Scholar]
- Takeuchi, Y. Gilded gait. In Proceedings of the 23nd Annual ACM Symposium on User Interface Software and Technology-UIST ’10, New York, NY, USA, 3–6 October 2010. [Google Scholar] [CrossRef]
- Magana, M.; Velázquez, R. On-shoe tactile display. In Proceedings of the 2008 IEEE International Workshop on Haptic Audio Visual Environments and Games, Ottawa, ON, Canada, 18–19 October 2008; pp. 114–119. [Google Scholar]
- Yokota, T.; Ohtake, M.; Nishimura, Y.; Yui, T.; Uchikura, R.; Hashida, T. Snow walking. In Proceedings of the 6th Augmented Human International Conference on AH ’15, Singapore, 9–11 March 2015; Association for Computing Machinery (ACM): New York, NY, USA, 2015; pp. 45–48. [Google Scholar]
- Iwata, H.; Yano, H.; Tomiyoshi, M. String Walker. In Proceedings of the ACM SIGGRAPH 2007 Emerging Technologies, San Diego, CA, USA, 13 August 2007. [Google Scholar]
- Jirattigalachote, W.; Shull, P.B.; Cutkosky, M.R. Virtual pebble: A haptic state display for pedestrians. In Proceedings of the 2011 RO-MAN, Atlanta, GA, USA, 31 July–3 August 2011; Institute of Electrical and Electronics Engineers (IEEE): New York, NY, USA, 2011; pp. 401–406. [Google Scholar]
- Schmidt, D.; Kovacs, R.; Mehta, V.; Umapathi, U.; Köhler, S.; Cheng, L.-P.; Baudisch, P. Level-Ups. In Proceedings of the 33rd Annual ACM Conference on Human Factors in Computing Systems-CHI ’15, Seoul, Korea, 18–23 April 2015; Association for Computing Machinery (ACM): Beijing, China, 2015. [Google Scholar]
- Horodniczy, D.; Cooperstock, J.R. Free the Hands! Enhanced Target Selection via a Variable-Friction Shoe. In Proceedings of the 2017 CHI Conference on Human Factors in Computing Systems, New York, NY, USA, 16 July 2017; Association for Computing Machinery: New York, NY, USA, 2017; pp. 255–259. [Google Scholar]
- Shokrollahi, E.; Goldenberg, A.A.; Drake, J.M.; Eastwood, K.W.; Kang, M. Application of a Nonlinear Hammerstein-Wiener Estimator in the Development and Control of a Magnetorheological Fluid Haptic Device for Robotic Bone Biopsy. Actuators 2018, 7, 83. [Google Scholar] [CrossRef]
- Chen, D.; Song, A.; Tian, L.; Yu, Y.; Zhu, L. MH-Pen: A Pen-type Multi-mode Haptic Interface for Touch Screens Interaction. IEEE Trans. Haptics 2018, 11, 1. [Google Scholar] [CrossRef] [PubMed]
- Kavas, O.; Gurocak, H. Haptic Interface with Linear Magnetorheological (MR) Brakes for Drone Control. In Proceedings of the 2018 15th International Conference on Ubiquitous Robots (UR), New York, NY, USA, 25 May 2018; Institute of Electrical and Electronics Engineers: New York, NY, USA, 2018; pp. 676–681. [Google Scholar]
- Guo, S.; Song, Y.; Yin, X.; Zhang, L.; Tamiya, T.; Hirata, H.; Ishihara, H. A Novel Robot-Assisted Endovascular Catheterization System with Haptic Force Feedback. IEEE Trans. Robot. 2019, 35, 685–696. [Google Scholar] [CrossRef]
- Nguyen, H.Q.; Le, T.D.; Nguyen, D.N.; Le, T.D.; Lang, T.V.; Ngo, T.V. Development of 3-DOF Force Feedback System Using Spherical Arm Mechanism and MR Brakes. Int. J. Mech. Eng. Robot. Res. 2020, 9, 170–176. [Google Scholar] [CrossRef]
- Son, H.; Gil, H.; Byeon, S.; Kim, S.-Y.; Kim, J.R. RealWalk. In Proceedings of the Extended Abstracts of the 2018 CHI Conference on Human Factors in Computing Systems, New York, NY, USA, 13 March 2018; Association for Computing Machinery: New York, NY, USA, 2018; p. D400. [Google Scholar]
- Son, H.; Hwang, I.; Yang, T.-H.; Choi, S.; Kim, S.-Y.; Kim, J.R. RealWalk: Haptic Shoes Using Actuated MR Fluid for Walking in VR. In Proceedings of the 2019 IEEE World Haptics Conference, New York, NY, USA, 24 February 2019; Institute of Electrical and Electronics Engineers (IEEE): New York, NY, USA, 2019; pp. 241–246. [Google Scholar]
- Yang, T.-H.; Son, H.; Byeon, S.; Gil, H.; Hwang, I.; Jo, G.; Choi, S.; Kim, S.-Y.; Kim, J.R. Magnetorheological Fluid Haptic Shoes for Walking in VR. IEEE Trans. Haptics 2020, 1. [Google Scholar] [CrossRef] [PubMed]
- Koller, U.; Willegger, M.; Windhager, R.; Wanivenhaus, A.; Trnka, H.-J.; Schuh, R. Plantar pressure characteristics in hallux valgus feet. J. Orthop. Res. 2014, 32, 1688–1693. [Google Scholar] [CrossRef] [PubMed]
- Ryu, S. A Sensor-Combined Miniature KinaesTactile Actuator Based on Magnetorheological Fluids. Master’s Thesis, KAIST, Daejeon, Korea, 4 December 2012. [Google Scholar]
- Varela-Jiménez, L.M.; Luna, J.L.V.; Cortés-Ramírez, J.A.; Song, G. Constitutive model for shear yield stress of magnetorheological fluid based on the concept of state transition. Smart Mater. Struct. 2015, 24. [Google Scholar] [CrossRef]
- Wereley, N.M.; Pang, L. Nondimensional analysis of semi-active electrorheological and magnetorheological dampers using approximate parallel plate models. Smart Mater. Struct. 1998, 7, 732–743. [Google Scholar] [CrossRef]
- Lindler, J.; Wereley, N.M. Analysis and Testing of Electrorheological Bypass Dampers. J. Intell. Mater. Syst. Struct. 1999, 10, 363–376. [Google Scholar] [CrossRef]
- Abbink, D.A.; Van Der Helm, F.C.T. Force perception measurements at the foot. In Proceedings of the 2004 IEEE International Conference on Systems, Man and Cybernetics (IEEE Cat. No.04CH37583), The Hague, The Netherlands, 10–13 October 2004; Institute of Electrical and Electronics Engineers (IEEE): New York, NY, USA, 2005. [Google Scholar]














Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Heo, Y.H.; Byeon, S.; Kim, T.-H.; Yun, I.-H.; Kim, J.R.; Kim, S.-Y. Investigation of a Haptic Actuator Made with Magneto-Rheological Fluids for Haptic Shoes Applications. Actuators 2021, 10, 5. https://doi.org/10.3390/act10010005
Heo YH, Byeon S, Kim T-H, Yun I-H, Kim JR, Kim S-Y. Investigation of a Haptic Actuator Made with Magneto-Rheological Fluids for Haptic Shoes Applications. Actuators. 2021; 10(1):5. https://doi.org/10.3390/act10010005
Chicago/Turabian StyleHeo, Yong Hae, Sangkyu Byeon, Tae-Hoon Kim, In-Ho Yun, Jin Ryong Kim, and Sang-Youn Kim. 2021. "Investigation of a Haptic Actuator Made with Magneto-Rheological Fluids for Haptic Shoes Applications" Actuators 10, no. 1: 5. https://doi.org/10.3390/act10010005
APA StyleHeo, Y. H., Byeon, S., Kim, T.-H., Yun, I.-H., Kim, J. R., & Kim, S.-Y. (2021). Investigation of a Haptic Actuator Made with Magneto-Rheological Fluids for Haptic Shoes Applications. Actuators, 10(1), 5. https://doi.org/10.3390/act10010005