A Soft 3D-Printed Robotic Hand Actuated by Coiled SMA



Abstract
1. Introduction
- Size: Adult-sized hand and forearm, typical size of adult hand is 396–517 mm based on the 5–95th percentile of the human forearm length [2].
- Object manipulation: Be able to manipulate commonly used objects of size 50–100 mm size, such as handling of daily usage objects.
- Manufacturing: The design should be easy for manufacturing, customizable to desired size and preferably using 3D printing for modification in rapid prototyping systems.
- Weight: The design and the material should result in a lightweight structure that should be under 300 g.
- Cost: Material cost for manufacturing the robotic hand should be low; typically the material cost should be less than $200.
- Load capacity: The robotic hand should hold a mass of at least 100 g.
- Design for manufacturing: Adheres to design for manufacturing (DFM) and assembly (DFA) principles.
- Operating conditions: The operating temperature of the device is room temperature 20 degrees Celsius.
- Noise: Low or no noise generated from the system for silent operation.
2. Literature Review
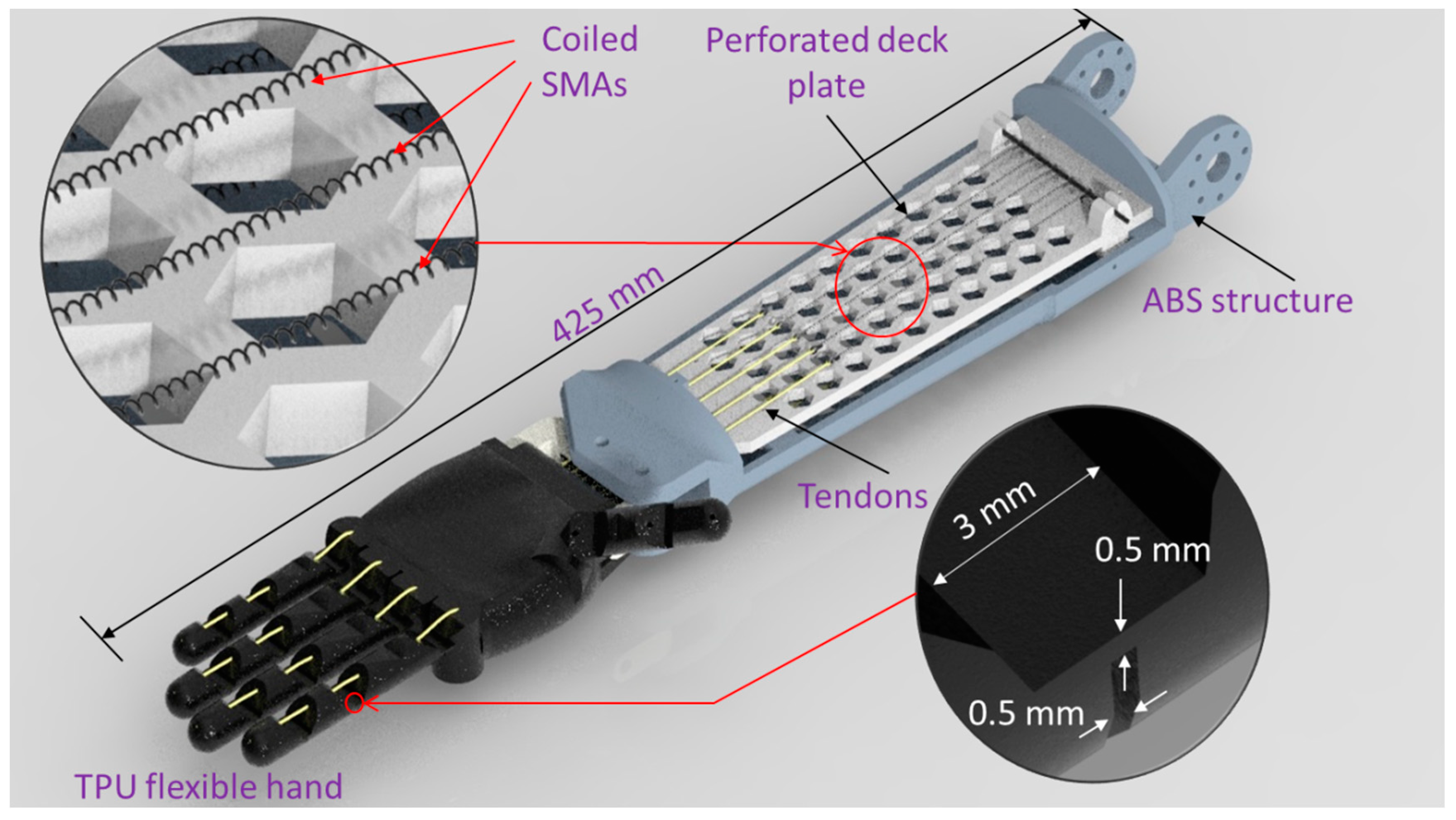
3. Design and Construction of the Robotic Hand
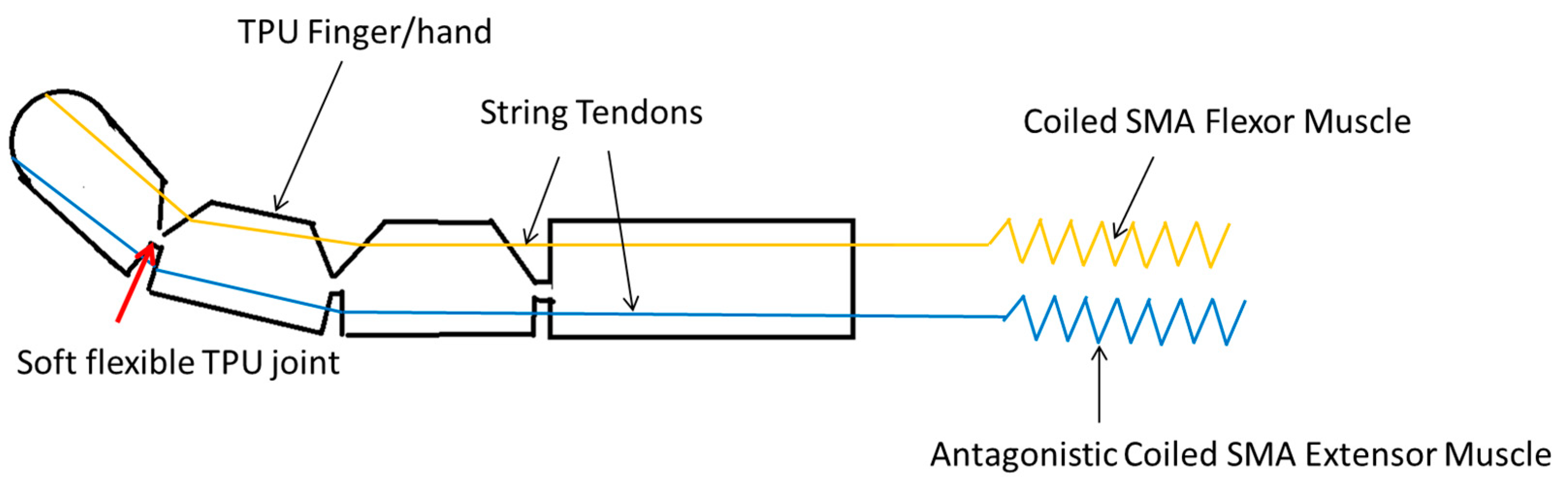
3.1. Mechanical Design
3.2. Coiled SMA Fabrication
3.3. Hand Construction
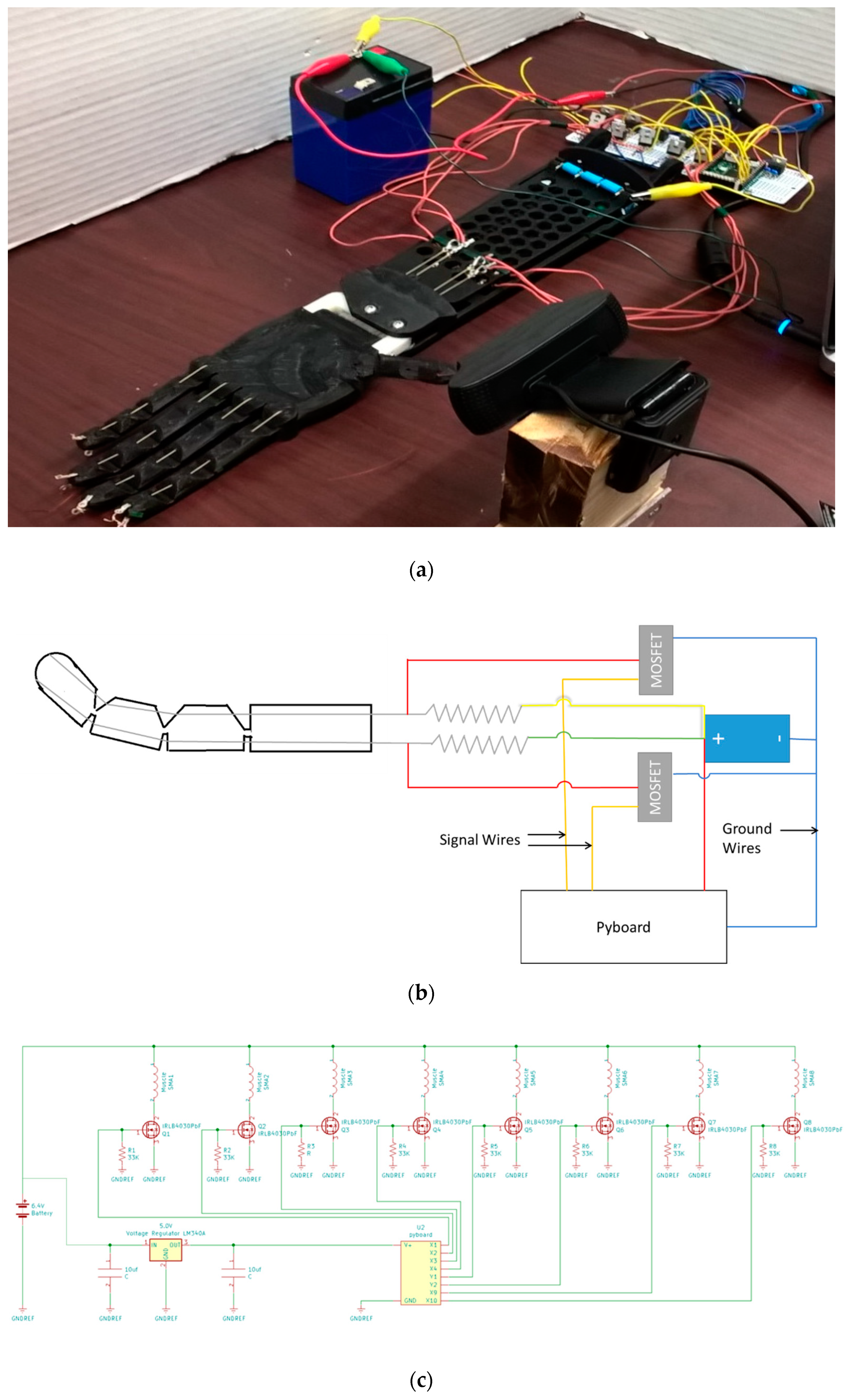
3.4. Circuitry and Microcontroller
4. Experimental Results and Discussion
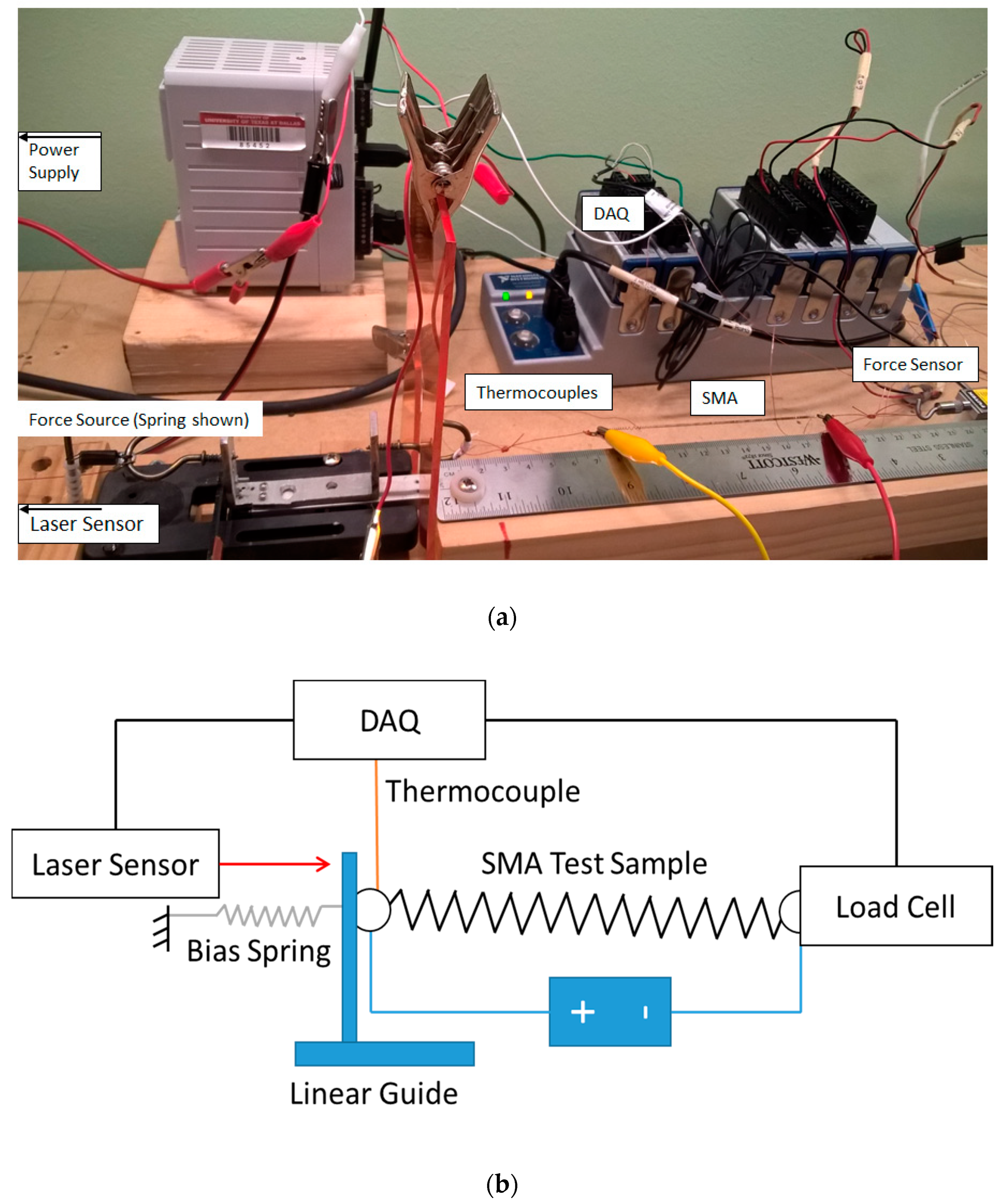
4.1. Muscle Characterization
4.2. Preliminary Tests on a Single Finger
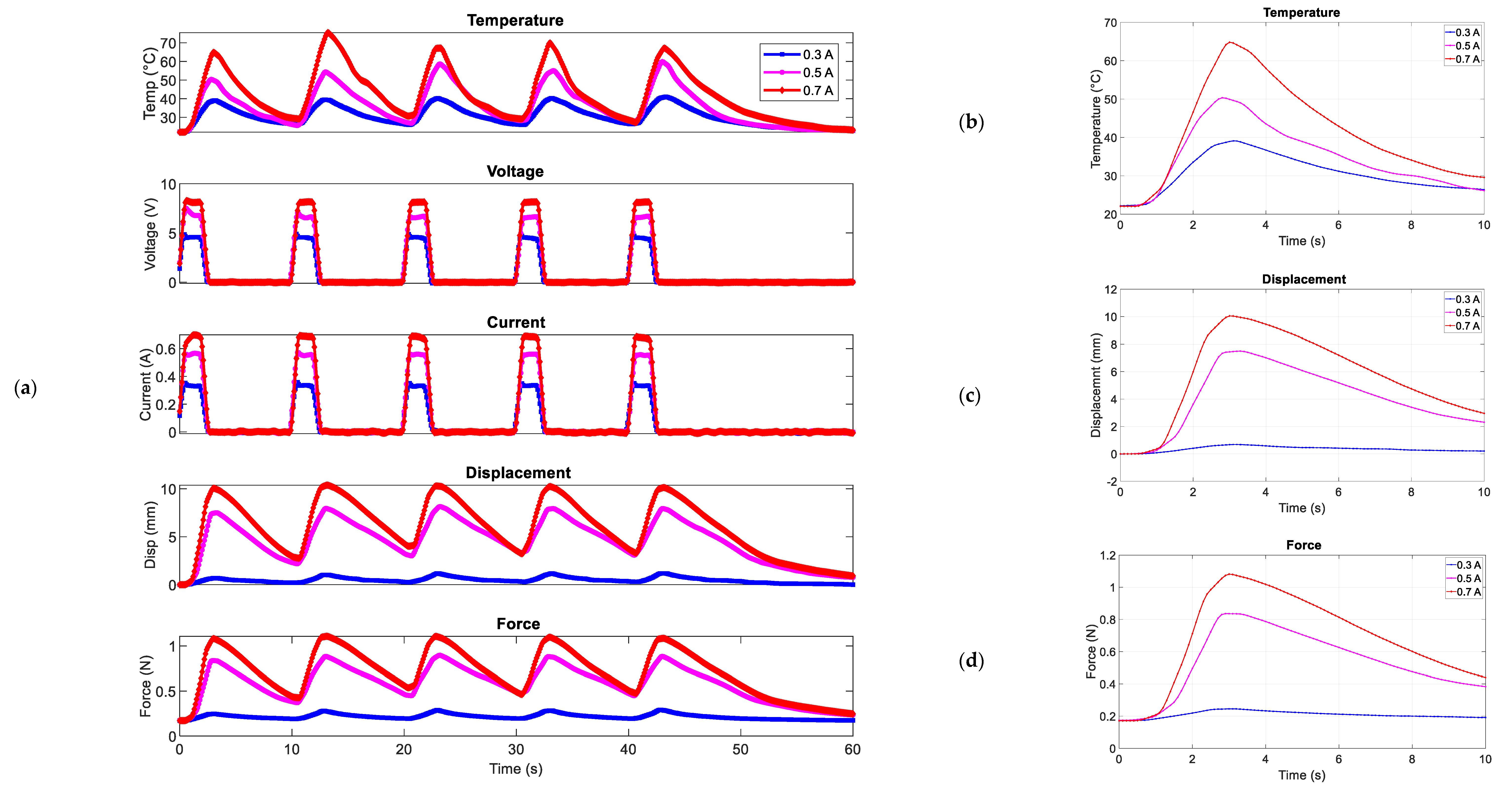
4.3. Electrical Current Tests
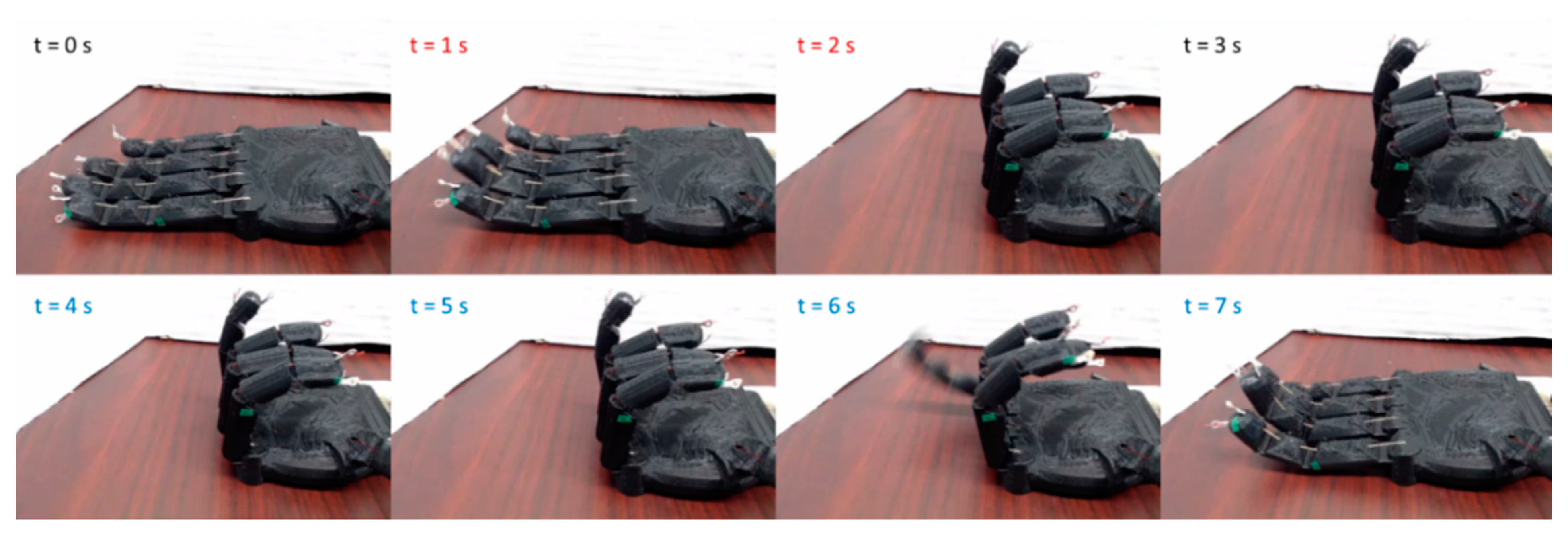
4.4. Horizontal Grasping Tests
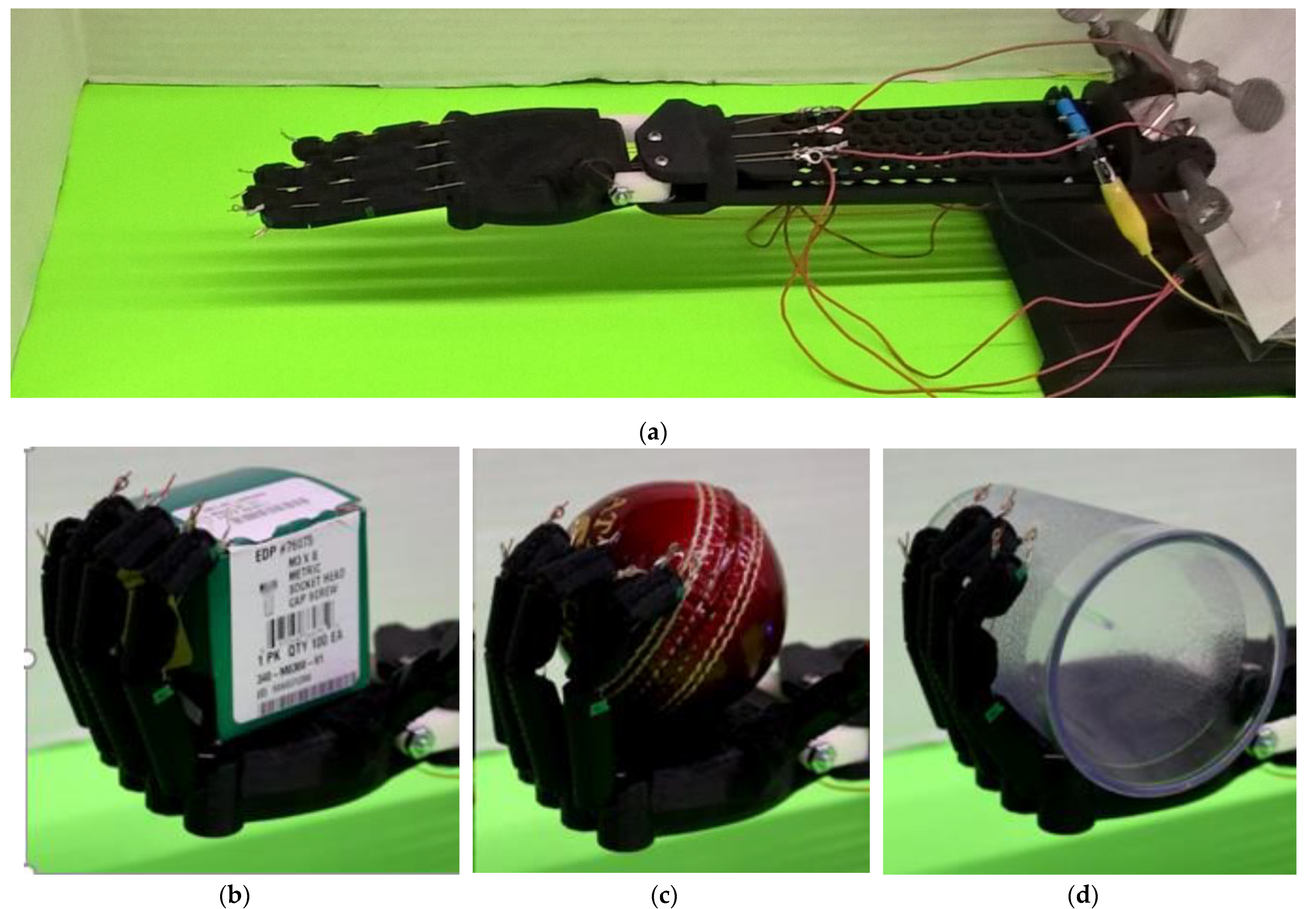
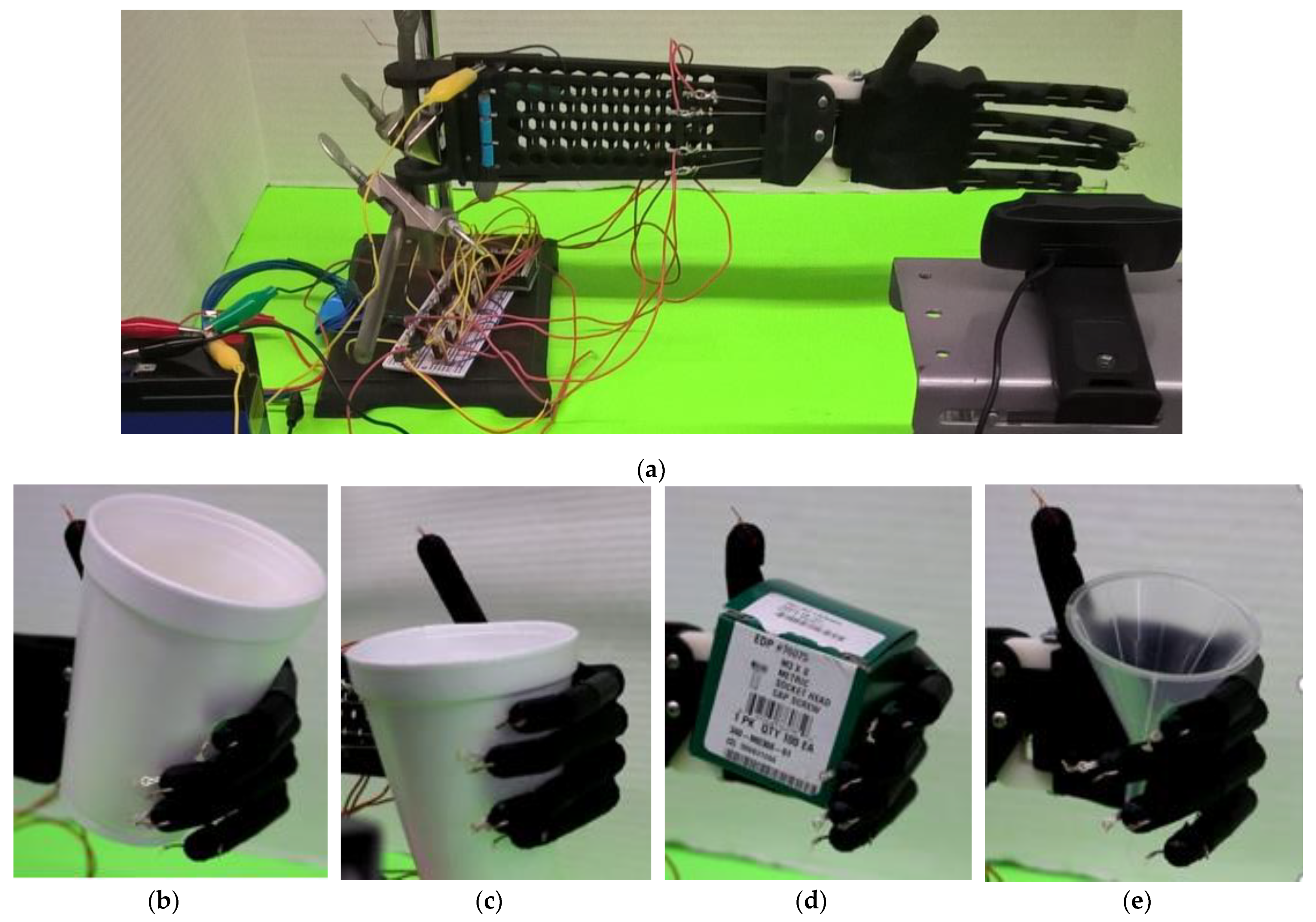
4.5. Vertical Grasping and Mass Tests
4.6. Frequency Tests
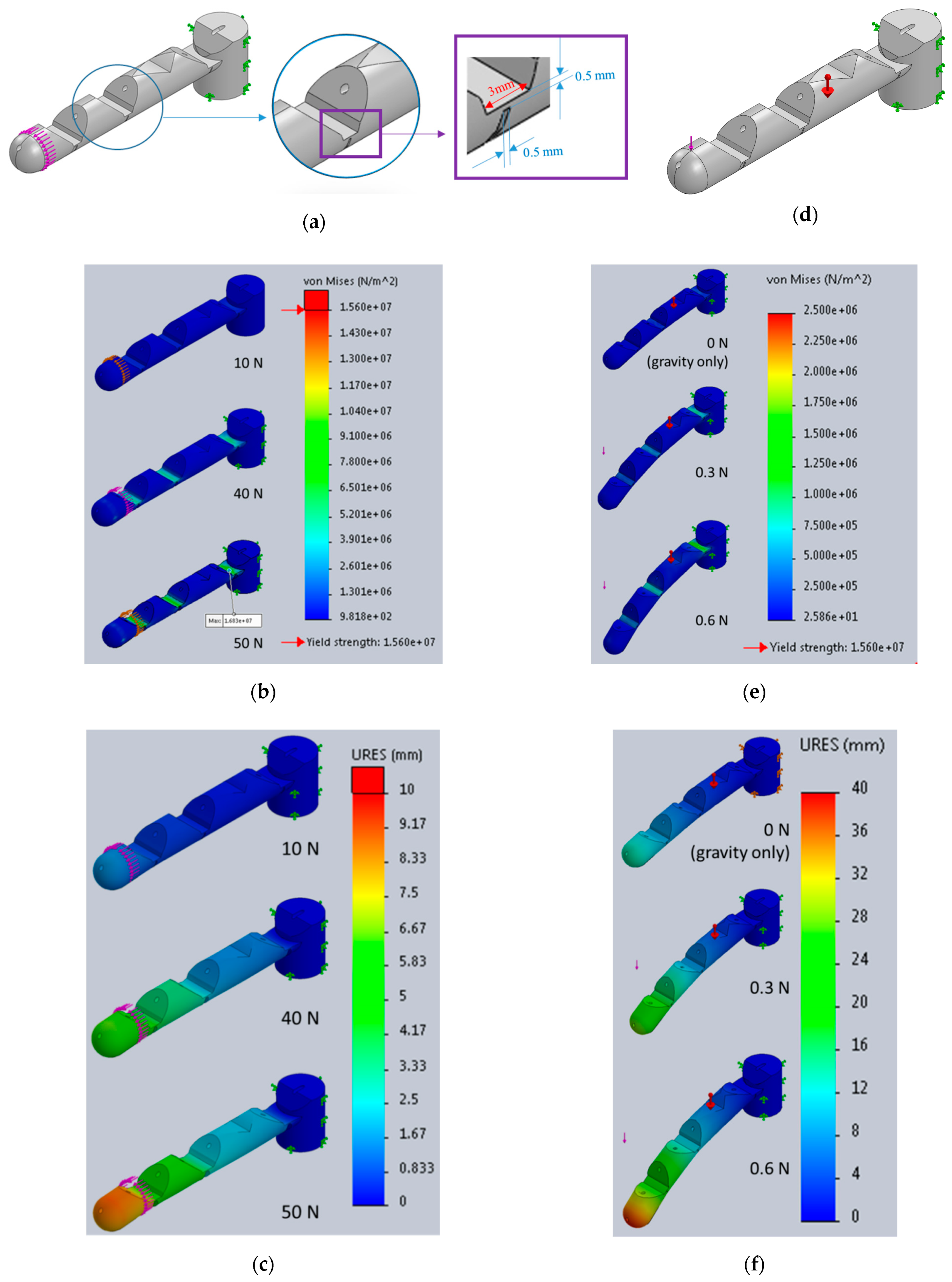
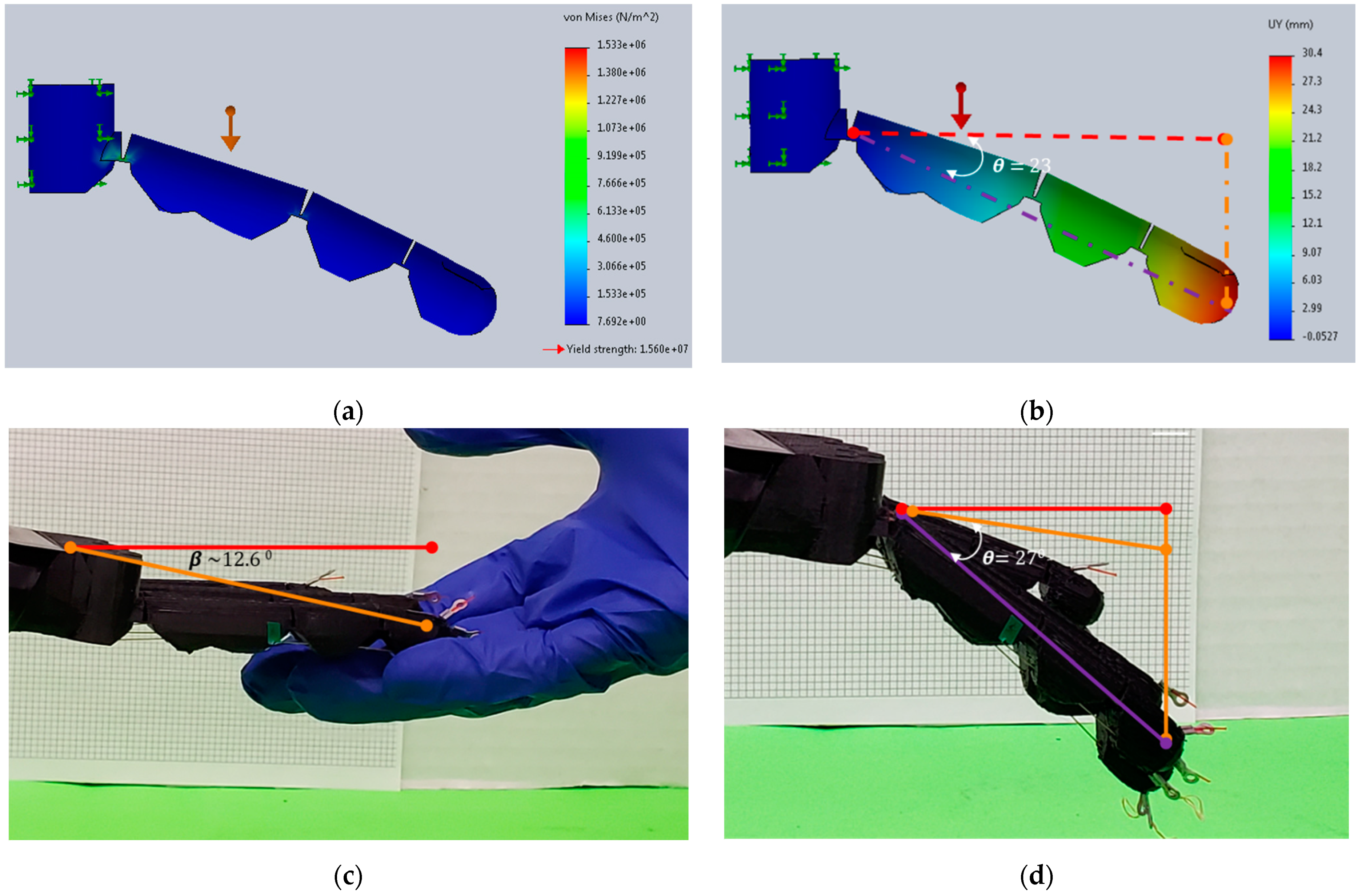
4.7. Structural Analysis
5. Conclusions and Summary
6. Future Work
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. Code
References
- Piazza, C.; Grioli, G.; Catalano, M.G.; Bicchi, A. A century of robotic hands. Annu. Rev. Control Robot. Auton. Syst. 2019, 2, 1–32. [Google Scholar] [CrossRef]
- Huston, R. Principles of Biomechanics; CRC Press: Boca Raton, FL, USA, 2009. [Google Scholar]
- Schulz, S.; Pylatiuk, C.; Bretthauer, G. A new ultralight anthropomorphic hand. In Proceedings of the 2001 ICRA, IEEE International Conference on Robotics and Automation (Cat. No. 01CH37164), Seoul, Korea, 21–26 May 2001. [Google Scholar]
- Belter, J.T.; Segil, J.L.; Dollar, A.M.; Weir, R.F. Mechanical design and performance specifications of anthropomorphic prosthetic hands: A review. J. Rehabil. Res. Dev. 2013, 50, 599–618. [Google Scholar] [CrossRef] [PubMed]
- Lanigan, D.; Tadesse, Y. Low cost robotic hand that senses heat and pressure. In Proceedings of the 2017 ASEE Gulf-Southwest Section Annual Conference, Richardson, TX, USA, 25–28 June 2017. [Google Scholar]
- Wu, L.; Tadesse, Y. Humanoid robot hand with sma actuators and servo motors. In ASME International Mechanical Engineering Congress and Exposition; American Society of Mechanical Engineers: Montreal, QC, Canada, 2014. [Google Scholar]
- Wu, L.; Jung de Andrade, M.; Saharan, L.K.; Rome, R.S.; Baughman, R.H.; Tadesse, Y. Compact and low-cost humanoid hand powered by nylon artificial muscles. Bioinspir. Biomim. 2017, 12, 026004. [Google Scholar] [CrossRef] [PubMed]
- Wu, L.; Larkin, M.; Potnuru, A.; Tadesse, Y. HBS-1: A modular child-size 3D printed humanoid. Robotics 2016, 5, 1. [Google Scholar] [CrossRef]
- Wu, L.; Jung de Andrade, M.; Rome, R.S.; Haines, C.; Lima, M.D.; Baughman, R.H.; Tadesse, Y. Nylon-muscle-actuated robotic finger. In Active and Passive Smart Structures and Integrated Systems 2015; International Society for Optics and Photonics: Bellingham, WA, USA, 2015. [Google Scholar]
- Salisbury, J.K.; Craig, J.J. Articulated hands force control and kinematic issues. Int. J. Robot. Res. 1982, 1, 4–17. [Google Scholar] [CrossRef]
- Guo, G.; Gruver, W.A.; Qian, X. A robotic hand mechanism with rotating fingertips and motor-tendon actuation. In Proceedings of the 1991 IEEE International Conference on Systems, Man, and Cybernetics: Decision Aiding for Complex Systems, Charlottesville, VA, USA, 13–16 October 1991. [Google Scholar]
- Kurita, Y.; Ono, Y.; Ikeda, A.; Ogasawara, T. Human-sized anthropomorphic robot hand with detachable mechanism at the wrist. Mech. Mach. Theory 2011, 46, 53–66. [Google Scholar] [CrossRef]
- Jang, G.; Lee, C.; Lee, H.; Choi, Y. Robotic index finger prosthesis using stackable double 4-BAR mechanisms. Mechatronics 2013, 23, 318–325. [Google Scholar] [CrossRef]
- Thayer, N.; Priya, S. Design and implementation of a dexterous anthropomorphic robotic typing (DART) hand. Smart Mater. Struct. 2011, 20, 035010. [Google Scholar] [CrossRef]
- George, J.A.; Kluger, D.T.; Davis, T.S.; Wendelken, S.M.; Okorokova, E.V.; He, Q.; Duncan, C.C.; Hutchinson, D.T.; Thumser, Z.C.; Beckler, D.T.; et al. Biomimetic sensory feedback through peripheral nerve stimulation improves dexterous use of a bionic hand. Sci. Robot. 2019, 4, eaax2352. [Google Scholar] [CrossRef]
- Calado, A.; Soares, F.; Matos, D. A review on commercially available anthropomorphic myoelectric prosthetic hands, pattern-recognition-based microcontrollers and sEMG sensors used for prosthetic control. In Proceedings of the 2019 IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC), Porto, Portugal, 24–26 April 2019. [Google Scholar]
- Ueda, J.; Kondo, M.; Ogasawara, T. The multifingered NAIST hand system for robot in-hand manipulation. Mech. Mach. Theory 2010, 45, 224–238. [Google Scholar] [CrossRef]
- Lotti, F.; Tiezzi, P.; Vassura, G.; Biagiotti, L.; Palli, G.; Melchiorri, C. Development of UB hand 3: Early results. In Proceedings of the 2005 IEEE International Conference on Robotics and Automation, Barcelona, Spain, 18–22 April 2005. [Google Scholar]
- Diftler, M.; Ambrose, R.O. Robonaut: A robotic astronaut assistant. In Proceedings of the 6th International Symposium on Artificial Intelligence and Robotics & Automation in Space: i-SAIRAS 2001, Montreal, QC, Canada, 18–22, June, 2001. [Google Scholar]
- Kargov, A.; Werner, T.; Pylatiuk, C.; Schulz, S. Development of a miniaturised hydraulic actuation system for artificial hands. Sens. Actuators A Phys. 2008, 141, 548–557. [Google Scholar] [CrossRef]
- Pylatiuk, C.; Mounier, S.; Kargov, A.; Schulz, S.; Brethauer, G. Progress in the development of a multifunctional hand prosthesis. In Proceedings of the 26th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, San Francisco, CA, USA, 1–5 September 2004. [Google Scholar]
- Jacobsen, S.C.; Wood, J.E.; Knutti, D.F.; Biggers, K.B. The UTAH/MIT dextrous hand: Work in progress. Int. J. Robot. Res. 1984, 3, 21–50. [Google Scholar] [CrossRef]
- Pons, J.; Ceres, R.; Pfeiffer, F. Multifingered dextrous robotics hand design and control: A review. Robotica 1999, 17, 661–674. [Google Scholar] [CrossRef]
- Bicchi, A.; Kumar, V. Robotic grasping and contact: A review. In Proceedings of the 2000 ICRA, Millennium Conference, IEEE International Conference on Robotics and Automation, Symposia Proceedings (Cat. No. 00CH37065), San Francisco, CA, USA, 24–28 April 2000. [Google Scholar]
- Martell, J.S.; Gini, G. Robotic hands: Design review and proposal of new design process. World Acad. Sci. Eng. Technol. 2007, 26, 85–90. [Google Scholar]
- Simone, F.; York, A.; Seelecke, S. Design and fabrication of a three-finger prosthetic hand using SMA muscle wires. In Proceedings of the Bioinspiration, Biomimetics, and Bioreplication 2015, San Diego, CA, USA, 9–11 March 2015; International Society for Optics and Photonics (SPIE): Bellingham, WA, USA, 2015. [Google Scholar]
- Tadesse, Y.; Hong, D.; Priya, S. Twelve degree of freedom baby humanoid head using shape memory alloy actuators. J. Mech. Robot. 2011, 3, 011008. [Google Scholar] [CrossRef]
- Cianchetti, M.; Licofonte, A.; Follador, M.; Rogai, F.; Laschi, C. Bioinspired soft actuation system using shape memory alloys. Actuators 2014, 3, 226–244. [Google Scholar] [CrossRef]
- Ameduri, S.; Brindisi, A.; Ciminello, M.; Concillio, A.; Quaranta, V.; Brandizzi, M. Car Soundproof Improvement through an SMA Adaptive System. Actuators 2018, 7, 88. [Google Scholar] [CrossRef]
- Sinn, T.; Barrett, R. Design, Manufacturing and Test of a High Lift Secondary Flight Control Surface with Shape Memory Alloy Post-Buckled Precompressed Actuators. Actuators 2015, 4, 156–171. [Google Scholar] [CrossRef]
- Boyraz, P.; Runge, G.; Raatz, A. An overview of novel actuators for soft robotics. Actuators 2018, 7, 48. [Google Scholar] [CrossRef]
- Tadesse, Y.; Thayer, N.; Priya, S. Tailoring the response time of shape memory alloy wires through active cooling and pre-stress. J. Intell. Mater. Syst. Struct. 2010, 21, 19–40. [Google Scholar] [CrossRef]
- Engeberg, E.D.; Dilibal, S.; Vatani, M.; Choi, J.-W.; Lavery, J. Anthropomorphic finger antagonistically actuated by SMA plates. Bioinspir. Biomim. 2015, 10, 056002. [Google Scholar] [CrossRef] [PubMed]
- She, Y.; Li, C.; Su, H.-J. Design and fabrication of a soft robotic hand with embedded actuators and sensors. J. Mech. Robot. 2015, 7. [Google Scholar] [CrossRef]
- De Laurentis, K.J.; Mavroidis, C. Mechanical design of a shape memory alloy actuated prosthetic hand. Technol. Health Care 2002, 10, 91–106. [Google Scholar] [CrossRef]
- Dilibal, S.; Guner, E.; Akturk, N. Three-finger SMA robot hand and its practical analysis. Robotica 2002, 20, 175. [Google Scholar] [CrossRef]
- Price, A.; Jnifene, A.; Naguib, H. Design and control of a shape memory alloy based dexterous robot hand. Smart Mater. Struct. 2007, 16, 1401. [Google Scholar] [CrossRef]
- Garg, K. BD Chaurasia’s Human Anatomy–Regional and Applied Dissection and Clinical: Volume 1 Upper Limb and Thorax; CBS Publishers and Distributors: New Delhi, India, 2004. [Google Scholar]
- Liu, H.; Yang, D.; Jiang, L.; Fan, S. Development of a multi-DOF prosthetic hand with intrinsic actuation, intuitive control and sensory feedback. Ind. Robot 2014, 41, 381–392. [Google Scholar] [CrossRef]
- Xu, Z.; Todorov, E. Design of a highly biomimetic anthropomorphic robotic hand towards artificial limb regeneration. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA)., Stockholm, Sweden, 16–21 May 2016. [Google Scholar]
- Della Santina, C.; Piazza, C.; Grioli, G.; Catalano, M.G.; Bicchi, A. Toward dexterous manipulation with augmented adaptive synergies: The Pisa/IIT SoftHand 2. IEEE Trans. Robot. 2018, 5, 1141–1156. [Google Scholar] [CrossRef]
- Tavakoli, M.; Batista, R.; Sgrigna, L. The UC softhand: Light weight adaptive bionic hand with a compact twisted string actuation system. Actuators 2016, 5, 1. [Google Scholar] [CrossRef]
- Simone, F.; Rizzello, G.; Motzki, P.; Seelecke, S. A soft five-fingered hand actuated by Shape Memory Alloy wires: design, manufacturing, and evaluation. Front. Robot. AI 2020, 7, 608841. [Google Scholar] [CrossRef]
- Farias, V.; Solis, L.; Melendez, L.; Garcia, C.; Velázquez, R. A four-fingered robot hand with shape memory alloys. In Proceedings of the AFRICON 2009, Nairobi, Kenya, 23–25 September 2009. [Google Scholar]
- Bergamasco, M.; Salsedo, F.; Dario, P. Shape memory alloy micromotors for direct-drive actuation of dexterous artificial hands. Sens. Actuators 1989, 17, 115–119. [Google Scholar] [CrossRef]
- Taniguchi, H.; Hashimoto, A.; Izuhara, S. Design of a Functional Prosthetic Hand for Children using Novel Shape Memory Alloy Actuators. Int. J. Innov. Eng. Technol. 2014, 57–63. [Google Scholar]
- Park, C.H.; Choi, K.J.; Son, Y.S. Shape memory alloy-based spring bundle actuator controlled by water temperature. IEEE/ASME Trans. Mechatron. 2019, 24, 1798–1807. [Google Scholar] [CrossRef]
- Hamidi, A.; Almubak, Y.; Rupawat, Y.M.; Warren, J.; Tadesse, Y. Poly-Saora robotic jellyfish: Swimming underwater by twisted and coiled polymer actuators. Smart Mater. Struct. 2020, 29, 045039. [Google Scholar] [CrossRef]
- Bergamasco, M.; Salsedo, F.; Dario, P. A linear SMA motor as direct-drive robotic actuator. In Proceedings of the 1989 International Conference on Robotics and Automation, Scottsdale, AZ, USA, 14–19 May 1989. [Google Scholar]
- Wu, L.; Karami, F.; Hamidi, A.; Tadesse, Y. Biorobotic systems design and development using TCP muscles. In Proceedings of the Electroactive Polymer Actuators and Devices (EAPAD) XX, Denver, CO, USA, 5–8 March 2018; International Society for Optics and Photonics (SPIE): Bellingham, WA, USA, 2018. [Google Scholar]
- Stratasys. FDM TPU 92A: Flexible Elastomer TPU 3D Printing Material. Available online: https://www.stratasys.com/materials/search/fdm-tpu-92a (accessed on 2 October 2020).
- Leonardis, D.; Frisoli, A. CORA hand: A 3D printed robotic hand designed for robustness and compliance. Meccanica 2020, 55, 1–16. [Google Scholar] [CrossRef]
- Potnuru, A.; Tadesse, Y. Characterization of coiled SMA actuators for humanoid robot. In Proceedings of the Active and Passive Smart Structures and Integrated Systems, Portland, OR, USA, 25–29 March 2017; International Society for Optics and Photonics (SPIE): Bellingham, WA, USA, 2017. [Google Scholar]
- Dynalloy, I. Flexinol® Actuator Wire Technical and Design Data. 2017. Available online: https://www.dynalloy.com/tech_data_wire.php (accessed on 24 November 2020).
- Häger-Ross, C.; Schieber, M.H. Quantifying the independence of human finger movements: Comparisons of digits, hands, and movement frequencies. J. Neurosci. 2000, 20, 8542–8550. [Google Scholar] [CrossRef] [PubMed]
- Jafarzadeh, M.; Tadesse, Y. End-to-End Learning of Speech 2D Feature-Trajectory for Prosthetic Hands. In Proceedings of the 2020 IEEE Second International Conference on Transdisciplinary AI (TransAI), Irvine, CA, USA, 21–23 September 2020. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type of Actuator | Motion Transmission Mode | No. of Actuators | Finger Return Mode | No. of Fingers | Weight | Total DOF | Name/ Developer |
|---|---|---|---|---|---|---|---|
| Muscles | Tendon | 40 | Muscles | 5 | 0.4 kg (hand) +1.13 kg (forearm) | 23 | Human hand § (male) [38] |
| Electrical motors | Flexible driven train (flex shaft) | 14 | Actuator | 5 | -- | 14 | Robonaut hand [19] |
| Tendon driven mechanism | 19 | Torsional springs | 5 | 0.09 kg (hand) +0.96 kg (forearm) | 19 | DART hand [14] | |
| Tendon/gear driven mechanism | 16 | Actuator | 5 | 0.665 kg (hand) +3.3 kg (actuators) | 16 | NAIST hand 2 [12] | |
| Tendon driven mechanism | 16 | Helical springs | 5 | -- | 16 | UB Hand 3 [18] | |
| Linkage mechanism | 5 | Actuator | 5 | 0.42 kg (hand) | 5 | HIT-DLR hand [39] | |
| Tendon driven mechanism | 10 | Actuator | 5 | 0.942 kg (hand + forearm) | 16 | Xu and Todorov [40] | |
| Tendon driven mechanism | 2 | Actuator | 5 | -- | 19 | Pisa/IIT SoftHand 2 [41] | |
| Twisted string mechanism | 3 | Actuator | 5 | 0.280 kg (hand) | 10 | UC Softhand [42] | |
| -- | -- | -- | 5 | 1.27 kg (hand) | 6 | DEKA LUKE Arm [15] | |
| Fluidic actuators | Hinge structure | 18 | Elastomeric spring | 5 | -- | 13 | Karlsruhe Univ., Germany [3] |
| Pneumatic | Tendon driven mechanism | 38 | Actuator | 4 | -- | 19 | UTAH/MIT [22] |
| Nylon actuators | Tendon driven mechanism | 10 | Actuator/torsional springs | 5 | 0.053 kg (hand) + 0.087 kg (forearm) | 16 | TCP UTD hand [7] |
| SMA | SMA wires | 9 | Actuator | 3 | -- | 8 | SMA hand [26] |
| SMA plates | 2 | Actuator | 1 | 0.044 kg (finger) | 1 | Engeberg et al. [33] | |
| SMA plates | 10 | Actuator | 5 | 0.282 kg (hand) | -- | She et al. [34] | |
| Coiled SMA | 22 | Actuator | 4 | 0.6 kg (hand) | 11 | Farias et al. [44] | |
| Coiled SMA | 8 | Actuator | 5 | 0.235 kg (hand + forearm) | 14 | THIS PAPER (TPU SMA Hand) * |
| Muscle | Initial Length (mm) | Input Voltage at 0.5 A (V) | Power Input at 0.5 A (W) |
|---|---|---|---|
| Index flexor | 24 | 4.0 | 2.00 |
| Middle flexor | 25 | 4.4 | 2.20 |
| Ring flexor | 26 | 4.1 | 2.05 |
| Pinky flexor | 23 | 4.1 | 2.05 |
| Index extensor | 25 | 4.0 | 2.00 |
| Middle extensor | 23 | 3.7 | 1.85 |
| Ring extensor | 22 | 3.6 | 1.80 |
| Pinky extensor | 24 | 4.1 | 2.05 |
| Ni-Ti Properties [54] | Density (g/cm3) | 6.46 |
| Specific Heat (cal/g°C) | 0.20 | |
| Melting Point (°C) | 1300 | |
| Thermal Conductivity (W/cm °C) | 0.18 | |
| Martensite Resistivity (μΩ cm) | 80 | |
| Austenite Resistivity (μΩ cm) | 100 | |
| Austenite Start Temperature (°C) | 70 | |
| Muscle Characteristics | Initial Trained Length (mm) | 28 |
| Wire diameter (mm) | 0.20 | |
| Overall diameter (mm) | 1.04 | |
| Pitch (mm/coil) | 0.25 | |
| Mass (g) | 0.343 | |
| Pretensioned length (mm) | 100 | |
| Max measured force output (N) | 1.11 |
| Mass (g) | 235 |
| with circuitry | 297 |
| with battery | 656 |
| Volume (cm3) | 232 |
| generalized (L × W × H, mm) | 425 × 120 × 75 |
| Degrees of freedom | 12 |
| Maximum holding mass (g) | 133 |
| Maximum holding size (mm) | 80 |
| Minimum holding size (mm) | 55 |
| Maximum frequency (Hz) | 0.125 |
| Averaged power input (W) | 7.82 |
| Estimated life cycle (hours) | 3.84 |
| Manufacturing time (hours) | 22 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Deng, E.; Tadesse, Y. A Soft 3D-Printed Robotic Hand Actuated by Coiled SMA. Actuators 2021, 10, 6. https://doi.org/10.3390/act10010006
Deng E, Tadesse Y. A Soft 3D-Printed Robotic Hand Actuated by Coiled SMA. Actuators. 2021; 10(1):6. https://doi.org/10.3390/act10010006
Chicago/Turabian StyleDeng, Eric, and Yonas Tadesse. 2021. "A Soft 3D-Printed Robotic Hand Actuated by Coiled SMA" Actuators 10, no. 1: 6. https://doi.org/10.3390/act10010006
APA StyleDeng, E., & Tadesse, Y. (2021). A Soft 3D-Printed Robotic Hand Actuated by Coiled SMA. Actuators, 10(1), 6. https://doi.org/10.3390/act10010006