1. Introduction
High-intensity repetitive tasks are essential in construction sites, which significantly contribute to workers’ physical strain [
1,
2,
3]. Such work environments lead to chronic fatigue accumulation among workers, resulting in serious safety concerns [
4,
5]. Recent studies indicate that approximately 42.3% of construction site accidents are directly related to worker fatigue [
6]. The risk of fatigue-related accidents increases particularly during high-intensity tasks such as carrying bags, scaffold installation, and masonry work [
7,
8,
9,
10]. Therefore, an effective solution for managing fatigue is necessary to ensure worker safety.
Previous studies [
11,
12,
13,
14,
15,
16,
17] consistently reported that fatigue negatively impacts workers’ musculoskeletal control, postural stability, and cognitive performance.
Robot assistance devices have gained attention as a potential solution to these problems [
18]. Nassour et al. [
19] found that wearing an exoskeleton robot effectively delays fatigue accumulation by reducing muscle activation. Blanco et al. [
20] verified that exoskeleton robots minimize heart rate variations during prolonged repetitive work and shorten fatigue recovery time. Schmalz et al. [
21] showed that exoskeleton robots reduce workers’ energy consumption and particularly decrease lower back muscle load by an average amount during heavy material handling tasks. Nnaji et al. [
22] demonstrated that exoskeleton robots can significantly reduce injury risk from inappropriate work postures by improving postural stability. While previous studies have primarily focused on back or upper-leg support, the exoskeleton used in this study is a passive device that assists lower-limb movement, supporting leg-based tasks such as lifting and carrying. However, previous studies primarily focused on single-task operations or assumed a constant work intensity, limiting their applicability to real construction environments. According to Kuber et al. [
23], exoskeleton robot performance differs between field conditions and laboratory environments. Liu et al. [
24] empirically proved that robot control performance deteriorates in high-temperature and humid environments. Ojha et al. [
25] also noted that irregular ground conditions at construction sites can compromise the balance control of exoskeleton robots, potentially reducing work stability. To address these issues, a methodology is needed to objectively evaluate exoskeleton robot performance and worker fatigue in actual work environments. However, existing fatigue assessment methods have primarily relied on subjective surveys and observational analyses, which have limitations in real-time monitoring and quantitative analysis. Recently, sensor-based objective evaluation methods have gained attention for overcoming these limitations. IMU sensors enable the continuous tracking of gait and posture dynamics, while DTW algorithms quantify pattern deviations in movement sequences. These combined methods provide an objective way to detect fatigue-related changes in motion. For example, Baghdadi et al. [
26] monitored worker fatigue through motion pattern analysis using IMU sensors. As demonstrated in Jo and Kim [
27,
28], increasing DTW values strongly correlate with fatigue accumulation during repetitive tasks, showing deterioration in workers’ movement consistency and stability as they become more fatigued. In our study, we followed a similar methodology, where body stability was evaluated through variability in acceleration and gyroscope data. Specifically, movement stability was assessed based on the standard deviation of three-axis acceleration signals, while body balance changes were derived from angular velocity fluctuations measured by the gyroscope, reflecting postural sway. Magnetic field data were not used in this analysis. Based on these previous studies, this research aims to compare worker fatigue between exoskeleton-assisted and non-assisted conditions under varying task intensities in actual construction sites. For this purpose, we will utilize existing real-time fatigue assessment methodologies based on IMU sensors and DTW algorithms. Specifically, to analyze fatigue differences according to work intensity, the following tasks were selected as research subjects. First, bag stacking work (flat surface–low intensity/inclined surface–high intensity); second, scaffold and clamp installation work (clamp assembly–low intensity/scaffold assembly–high intensity); and third, masonry installation work (low position–low intensity/high position–high intensity). Through this, we will analyze the impact of exoskeleton robots on worker fatigue accumulation in both low-intensity and high-intensity work environments at actual construction sites. Based on this, the following section outlines the experimental design and analysis procedures used in this study.
2. Methodology
2.1. Research Framework
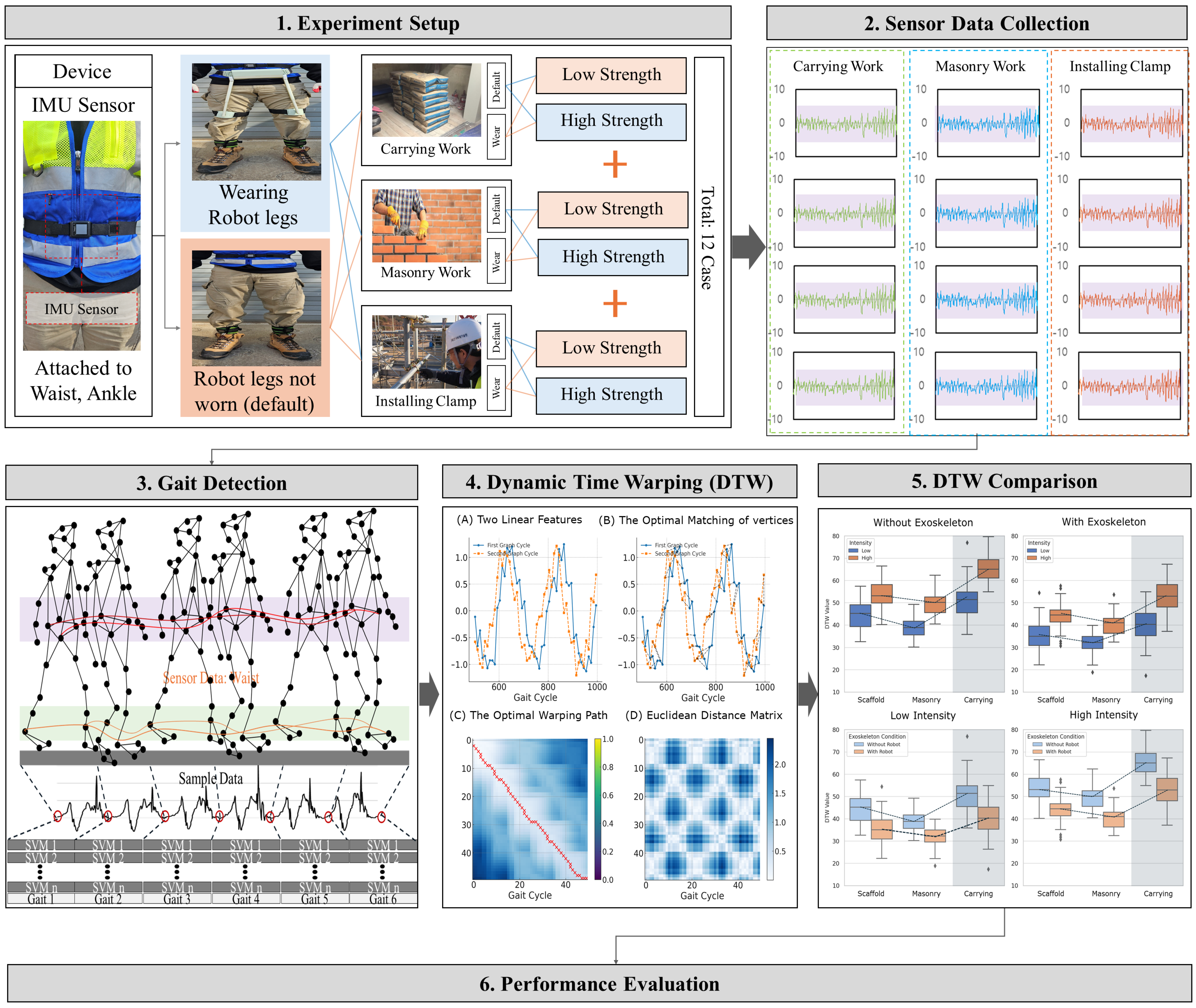
This study designed experiments to evaluate the impact of repetitive construction work on worker fatigue accumulation and verify whether robotic assistance devices can reduce such fatigue. The overall research framework consists of six stages, including experimental design, data collection, analysis, and evaluation, with each stage focusing on achieving research objectives through systematic experimental execution and data analysis. In the first stage, the experimental environment was established and preparations for data collection were conducted. Workers performed bag stacking, masonry installation, and clamp installation tasks, with experiments conducted at both low- and high-intensities for each task. This framework process is shown in
Figure 1.
During the experiments, IMU sensors were used to record workers’ movement data [
29], which was then used to analyze gait and work patterns. IMU data were collected using APDM sensors (APDM, Inc., Portland, OR, USA), which recorded three-axis acceleration and gyroscope data at a sampling rate of 128 Hz. Each participant performed one assigned task per session, which lasted for 2 continuous hours. To prevent fatigue carryover, participants performed different tasks on separate days, with a minimum rest period of two days between sessions. In the subsequent Gait Detection stage, worker gait patterns were evaluated based on sensor data. The collected sensor data was utilized to analyze gait cycles and balance changes during work and to evaluate motion differences according to work intensity. In the third stage, the DTW algorithm was employed to compare movement patterns between regular work and robot-assisted work [
30]. The DTW algorithm was used to quantitatively analyze whether robotic assistance devices contribute to reducing worker fatigue by evaluating the similarity of movement patterns during work. The DTW algorithm was implemented using Python 3.8 (Python Software Foundation, Wilmington, DE, USA). Subsequently, in the Sensor Data Analysis stage, fatigue accumulation patterns were analyzed using signal data (acceleration, gyroscope) collected from IMU sensors. This enabled precise evaluation of differences based on work intensity and whether robotic assistance devices were worn. Finally, through the DTW Comparison stage, the effectiveness of robotic assistance devices was verified by comparing DTW values across experimental conditions. Based on this, the overall experimental results were analyzed to evaluate the impact of robotic assistance devices on reducing worker fatigue.
2.2. Experiment Design
In this study, we designed experiments to evaluate fatigue levels according to work intensity by selecting major repetitive tasks performed at construction sites. The experimental tasks consisted of Carrying Work, Installing Clamp, and Masonry Work, with each task categorized into low-intensity and high-intensity based on execution method and physical demands. An overview of the sensor setup and experimental tasks is presented in
Figure 2.
For carrying work, tasks performed on a flat surface were defined as low-intensity, while those performed on an inclined surface were classified as high-intensity. In scaffold and clamp installation work, clamp assembly was set as low-intensity and scaffold assembly as high-intensity. For masonry work, tasks performed at a lower position were categorized as low-intensity, while those performed at a higher position were designated as high-intensity. These intensity classifications were established considering workers’ physical burden (load, work position, duration, etc.) and reflected typical working conditions at construction sites.
Each task was conducted under two experimental conditions: Baseline Condition (without robotic assistance) and Assisted Condition (with robotic assistance). The exoskeleton used in this study was the WIR-WIM-KRA model developed by WI Robotics Inc. (Seoul, The Republic of Korea). It is a passive leg-support device designed to assist lifting and carrying motions by reducing lower-back load. In the baseline condition, work was performed using conventional methods without robotic assistance, while in the assisted condition, the same tasks were performed while wearing the assistive device. IMU sensors were attached to the waist to record participants’ movement data, allowing for evaluation of movement changes according to work intensity and robotic assistance device usage. This experimental design enabled comparative analysis of worker fatigue and evaluation of the robotic assistance device’s impact on fatigue reduction.
To maintain consistency in the experimental environment, all workers were instructed to perform tasks in the same manner, and a total of 12 data samples (3 tasks × 2 intensity conditions × 2 experimental conditions) were collected. A total of 82 male participants were recruited for this study. All participants were either current or former construction workers, and none had prior experience with exoskeletons. They were in generally good physical condition and free from musculoskeletal disorders. The overall physical characteristics of the participants, including height, weight, and age, are summarized in
Table 1.
2.3. IMU Data and Gait Detection
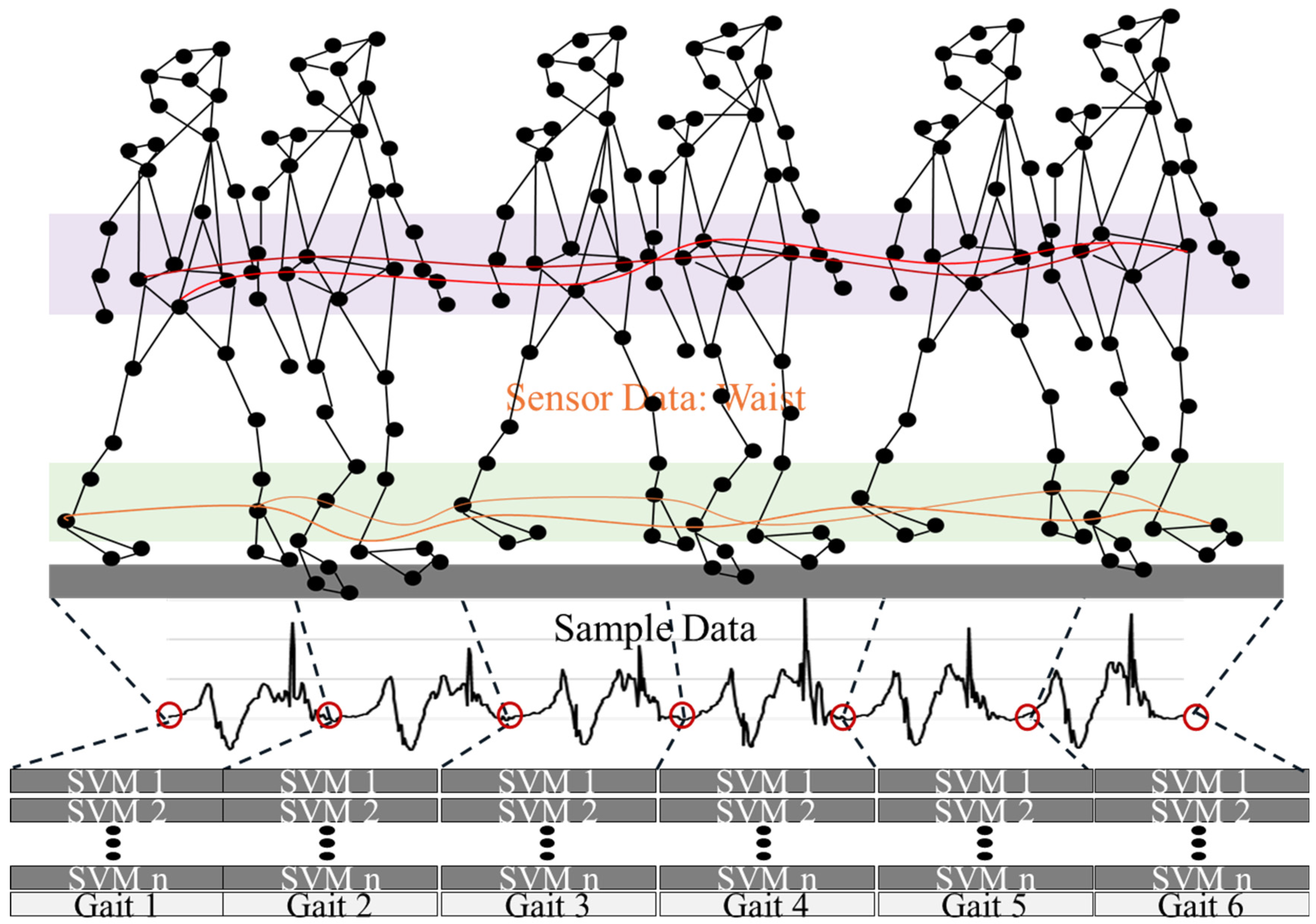
Using IMU sensors, we collected workers’ movement data and quantitatively evaluated fatigue accumulation patterns. The IMU sensors used in the experiment recorded acceleration data, enabling real-time detection and analysis of workers’ gait and movements. IMU sensors were attached to the workers’ waists, allowing measurement of movement stability and changes in body balance during task execution. Based on sensor data, we measured workers’ sustained postures over specific time periods, travel distances, and changes in gait patterns, comparing differences in physical burden according to work intensity. During the gait detection process, we analyzed sensor data changes for each gait cycle to evaluate workers’ balance changes and fatigue accumulation status. Data collected from the waist sensor was used to classify workers’ movements and analyze repetitive motions occurring during work.
For carrying work, tasks performed on a flat surface were defined as low-intensity, while those performed on an inclined surface were classified as high-intensity. In scaffold and clamp installation work, the clamp assembly was set to low intensity, and the scaffold in
Figure 3, shown above, demonstrates the detection of six distinct gait cycles from sample data. The upper portion shows the skeletal tracking of movement patterns, while the middle section displays sensor data from the waist, and the bottom section indicates the Support Vector Machine (SVM) classification of each gait cycle. This provides a comprehensive view of how the system detects and analyzes walking patterns during construction tasks.
2.4. Dynamic Time Warping for Fatigue Monitoring
The collected IMU data was analyzed using the DTW algorithm, which evaluates the similarity of movement patterns that change over time. The DTW algorithm calculates the optimal alignment between two time-series signals, allowing for the comparison of movement patterns that may vary in speed or duration. In this study, DTW values were used to quantify the similarity between baseline and task–phase movement data. Higher DTW values indicate greater deviations in motion patterns, which have been associated with increased fatigue in prior studies. This enables an objective assessment of how consistently workers maintain their gait and posture under physical strain. This analytical approach was specifically chosen to quantitatively analyze pattern differences between regular work and robot-assisted work [
31]. The data analysis process began with a crucial preprocessing step, where sensor errors and extreme movement data were filtered out to improve the overall reliability of the analysis [
32].
Using the DTW algorithm, we conducted a detailed comparison between regular work performance data and robot-assisted work data. This comparison allowed us to quantify changes between the two datasets based on specific movement patterns. Our analysis revealed distinctive movement pattern differences between low-intensity and high-intensity work conditions, providing insights into how fatigue impacts workers under varying environmental conditions. By analyzing DTW value differences between the experimental group wearing robotic assistance devices and the non-wearing control group, we were able to assess the effectiveness of robotic assistance in reducing worker fatigue.
3. Result
3.1. Comparison of DTW Values by Work Intensity and Robot Use
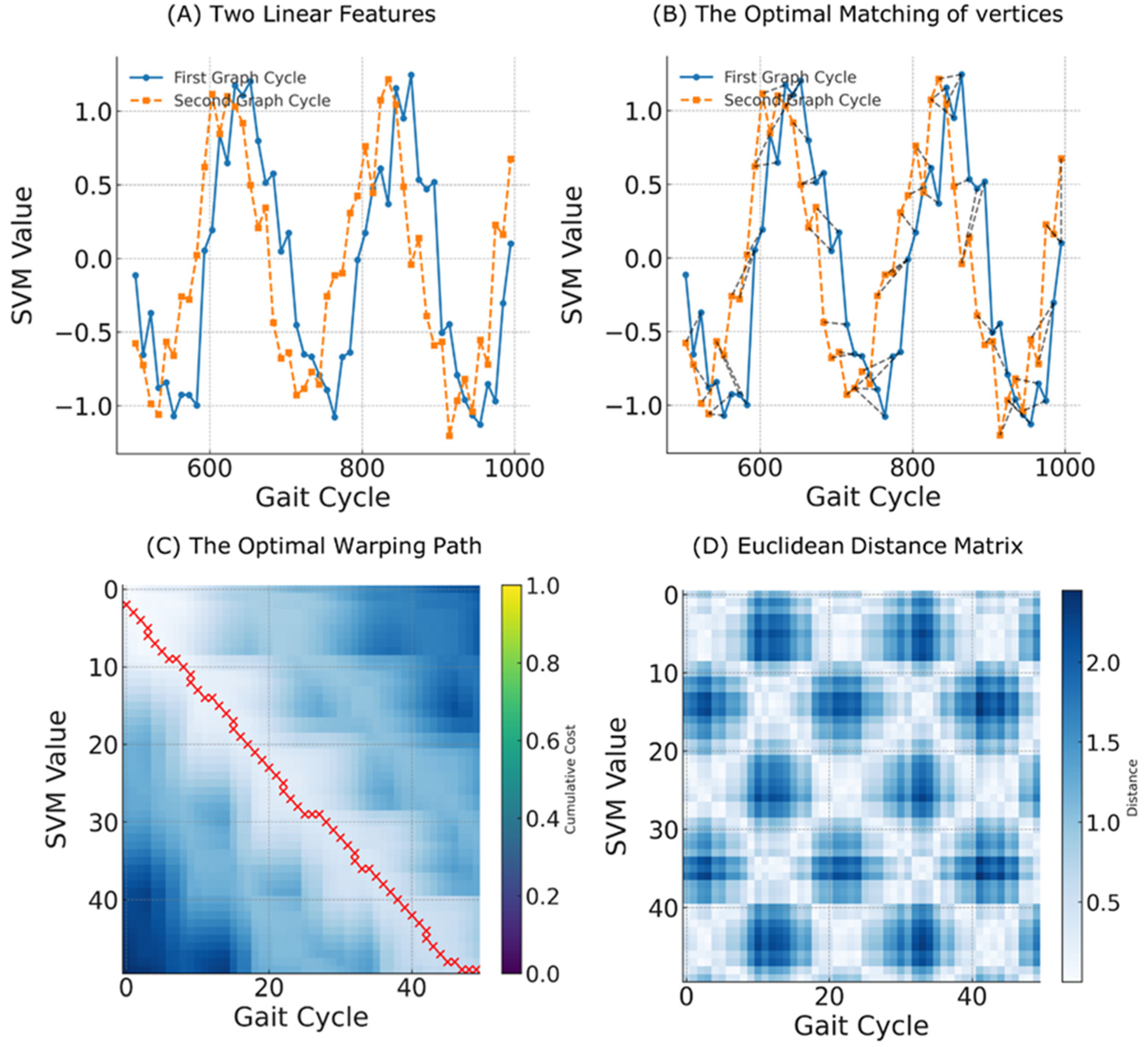
The DTW analysis process is visualized in
Figure 4, which illustrates the comparison of movement patterns through four interconnected components. The top graphs show two gait cycles plotted as time series data, with the blue solid line representing the first gait cycle and the orange dashed line showing the second gait cycle. These plots demonstrate the temporal alignment challenge that DTW addresses. Below, the Euclidean distance matrix is displayed as a heat map, where colors indicate the similarity between points, with darker blue representing greater distances between corresponding movements. The optimal warping path, shown as a red diagonal line in the distance matrix, represents the best alignment between the two sequences, minimizing the cumulative distance between matched points. Finally, the optimal matching of vertices is visualized in the bottom right heat map, where the pattern indicates how points from one sequence align with points in the other, with brighter areas representing closer matches between the sequences.
The analysis of DTW values across different construction tasks revealed significant patterns in worker fatigue accumulation and the effectiveness of exoskeleton support.
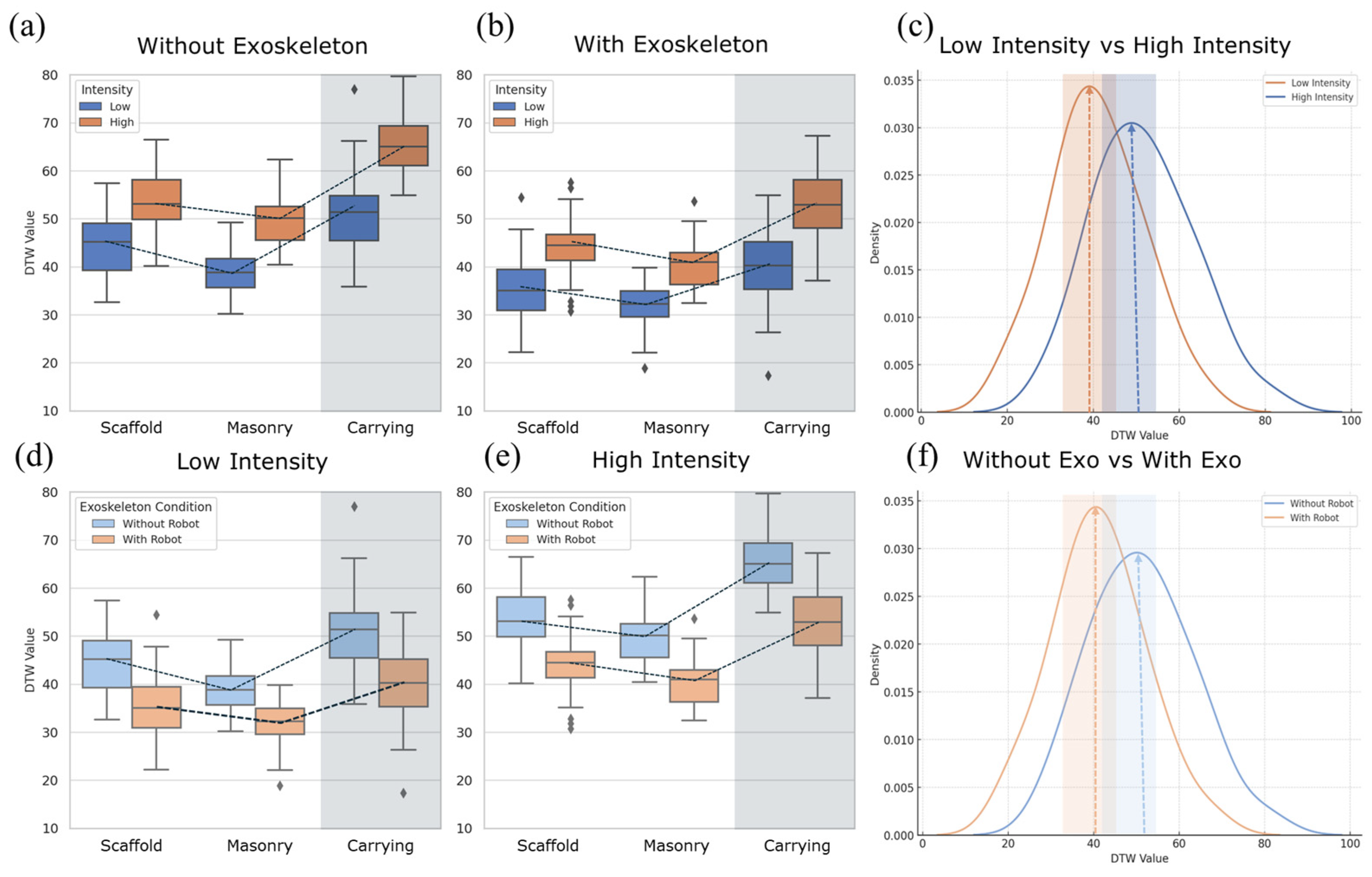
Figure 5 presents a comprehensive comparison of DTW values under various experimental conditions. Without exoskeleton assistance, the median DTW values ranged from approximately 38–55 for low-intensity tasks and 50–65 for high-intensity tasks. When workers used exoskeleton support, these values decreased to approximately 32–42 for low-intensity tasks and 38–55 for high-intensity tasks. This reduction in DTW values indicates greater movement consistency and lower fatigue accumulation when using the exoskeleton.
Most notably, masonry work showed the largest improvement with exoskeleton support, with DTW values decreasing by approximately 22% in low-intensity conditions and 18% in high-intensity conditions. Scaffold installation and carrying work also demonstrated meaningful improvements, with DTW reductions of 15–20% across intensity levels. The distribution density of DTW values comparing low-intensity (blue curve) and high-intensity (orange curve) tasks clearly demonstrates that high-intensity tasks consistently produced higher DTW values (mean approximately 58) compared to low-intensity tasks (mean approximately 42). This difference confirms that high-intensity work induces greater movement pattern variations, which is indicative of increased fatigue.
In low-intensity tasks, the exoskeleton reduced DTW values across all three task types, with the most substantial reductions observed in scaffold installation (approximately 25% decrease) and masonry work (approximately 23% decrease). For high-intensity tasks, the exoskeleton’s effectiveness showed a different pattern. While still beneficial for all tasks, the reduction in DTW values was more pronounced in masonry work (approximately 20% decrease) and carrying work (approximately 22% decrease), suggesting that the exoskeleton provides greater support during physically demanding tasks that involve vertical movement and load bearing.
The overall distribution density of DTW values comparing work performed without an exoskeleton (blue curve) and with an exoskeleton (orange curve) demonstrates that exoskeleton use consistently reduced DTW values across all experimental conditions, with the mean DTW value decreasing from approximately 55 (without exoskeleton) to approximately 40 (with exoskeleton). This difference provides strong evidence for the overall effectiveness of exoskeleton support in reducing movement variations associated with worker fatigue. These results demonstrate that exoskeleton robots can effectively reduce worker fatigue across various construction tasks, with their effectiveness being more pronounced in high-intensity tasks that place greater physical demands on workers.
3.2. Time-Series Analysis of DTW Values in Construction Tasks
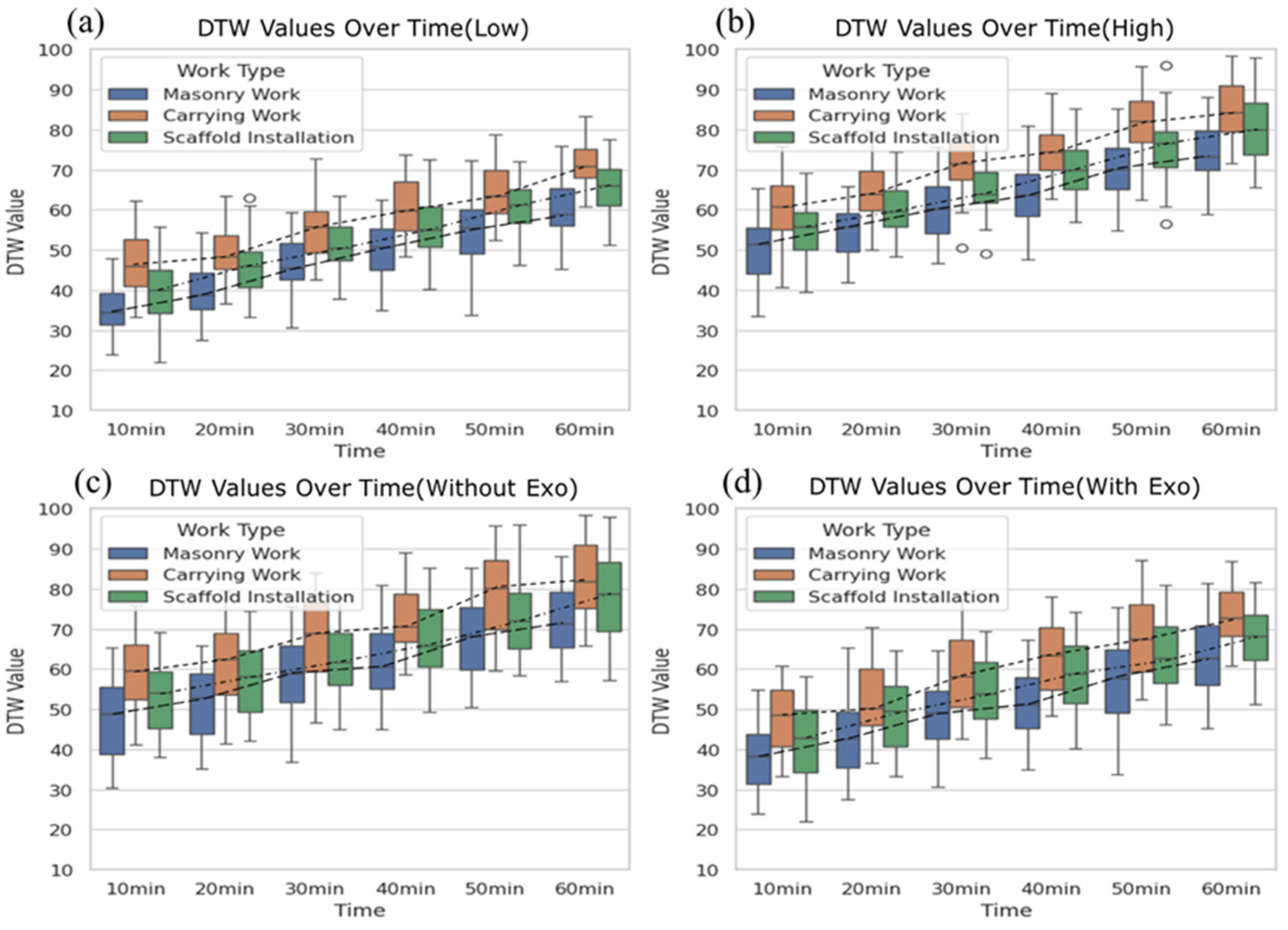
Figure 6 illustrates the progression of DTW values over time across different work types, intensity levels, and exoskeleton conditions. The time-series analysis reveals clear patterns of fatigue during the 60 min work periods. In low-intensity tasks (top-left panel), DTW values showed a steady increase from baseline measurements at 10 min to maximum values at 60 min. Masonry work demonstrated the lowest initial DTW values (approximately 35) but increased to around 60 by the end of the period. Carrying work exhibited the highest DTW values throughout the duration, starting at approximately 50 and reaching 75 after 60 min, indicating that this task induces more rapid fatigue even at lower intensities.
High-intensity tasks (top-right panel) displayed significantly elevated DTW values compared to their low-intensity counterparts, with all three work types starting at higher baseline values (45–65) and reaching considerably higher endpoints (75–90). Scaffold installation showed the most dramatic increase in the high-intensity condition, with DTW values rising from approximately 55 to 85, suggesting that this task becomes particularly challenging as fatigue accumulates. The steeper slopes observed in high-intensity conditions indicate a more rapid deterioration of movement consistency over time.
When comparing work performed without exoskeleton support (bottom-left panel) to work with exoskeleton assistance (bottom-right panel), the data demonstrates the protective effect of the exoskeleton against fatigue. Without exoskeleton support, DTW values started at 45–65 and reached 70–90 after 60 min. In contrast, with exoskeleton support, initial DTW values were lower (35–55) and peaked at significantly reduced levels (60–75). This represents approximately a 15–20% reduction in maximum DTW values when using the exoskeleton.
Notably, the rate of increase in DTW values was also more gradual with exoskeleton support. Without exoskeleton assistance, DTW values increased by an average of 7–8 points every 10 min, whereas with exoskeleton support, this increase was limited to 5–6 points per 10 min interval. This suggests that exoskeletons not only reduce overall fatigue levels but also slow the rate of fatigue, potentially extending the period during which workers can maintain safe and efficient movement patterns.
Across all conditions, carrying work consistently showed the highest DTW values, followed by scaffold installation, with masonry work generally exhibiting the lowest values. However, the relative benefit of exoskeleton support was most pronounced in scaffold installation tasks, where the reduction in DTW values at the 60 min mark was approximately 23%, compared to 18% for carrying work and 16% for masonry work. This indicates that the effectiveness of exoskeleton support varies by task type, with the greatest benefits observed in tasks involving complex full-body movements and postural stability challenges.
3.3. Distribution of DTW Values Across Different Work Types and Conditions
Figure 7 shows the frequency distribution of DTW values for each work type (masonry, carrying, and scaffold work) under different intensity levels and exoskeleton conditions. This graph represents how often specific DTW values occurred during the experiments, allowing us to analyze the consistency of workers’ movement patterns across different scenarios.
For masonry work (left column), when workers wore exoskeletons during low-intensity tasks, DTW values were mainly concentrated between 25 and 40, with the highest frequency around 32. This indicates that workers maintained relatively consistent movement patterns. When performing high-intensity masonry work with exoskeletons, the values shifted to 30–45, showing increased movement variability despite robotic assistance. Without exoskeletons, DTW values shifted further right, with low-intensity values centered around 35–40 and high-intensity values around 45–55, clearly showing greater movement inconsistency.
Carrying work (middle column) showed generally higher DTW values than masonry work across all conditions. With exoskeleton support, DTW values for low-intensity tasks were mainly between 45 and 50, while high-intensity values clustered around 50–55. Without exoskeletons, the values increased significantly, with low-intensity tasks showing values of 55–65 and high-intensity tasks reaching 65–70. This substantial increase (about 15–20 points) represents one of the largest improvements from exoskeleton use among all work types, suggesting carrying tasks benefit greatly from robotic assistance.
Scaffold work (right column) displayed the most dramatic differences. With exoskeletons, both low- and high-intensity tasks maintained relatively narrow distributions centered around 40 and 45, respectively. Without exoskeletons, the distributions not only shifted right but also widened considerably, especially in high-intensity conditions, where values ranged from 50 to 65 with some outliers beyond this range. This widening distribution indicates that without robotic support, scaffold work produces highly variable movement patterns that become increasingly inconsistent as fatigue builds up.
The box plots above each histogram confirm these patterns, showing the median, quartiles, and range of DTW values for each condition. The median values (vertical line within each box) consistently increase as we move from low- to high-intensity and from with exoskeleton to without exoskeleton conditions. The width of the boxes also tends to increase without exoskeleton support, indicating greater variability in movement patterns.
These distribution patterns provide statistical evidence that exoskeleton support significantly improves movement consistency across all work types, with the most substantial benefits seen in carrying and scaffold work under high-intensity conditions. The narrower distributions with exoskeleton support suggest that robotic assistance helps standardize worker movements, potentially reducing the risk of fatigue-related accidents caused by erratic or compensatory movements.
3.4. Statistical Analysis of DTW Values Across Experimental Conditions
Table 1 presents the statistical analysis results comparing DTW values across different experimental conditions.
T-tests were used to compare DTW values between two experimental conditions (e.g., with vs. without exoskeleton), and one-way ANOVA was applied to assess differences across multiple task types and intensity levels. These methods were appropriate given the study’s objective of comparing mean values across structured experimental groups. The analysis was conducted using
t-tests for paired comparisons and ANOVA for group comparisons, with significance determined at
p < 0.05.
Table 2 presents statistical analysis results comparing DTW values across different experimental conditions.
T-tests were used to compare DTW values between two experimental conditions (e.g., with vs. without exoskeleton), and one-way ANOVA was applied to assess differences across multiple task types and intensity levels. These methods were appropriate given the study’s objective of comparing mean values across structured experimental groups. The analysis was conducted using
t-tests for paired comparisons and ANOVA for group comparisons, with significance determined at
p < 0.05.
The intensity comparison results demonstrate statistically significant differences between low- and high-intensity conditions across all work types. Masonry work showed a significant difference (t = −2.83384, p = 0.017874) between low- and high-intensity conditions. This difference was even more pronounced in carrying work (t = −3.71587, p = 0.004005) and scaffold work (t = −3.35739, p = 0.007293). The overall ANOVA result (F = 7.881779, p = 7.76 × 10−5) confirms that work intensity has a significant impact on DTW values across all tasks. These results statistically validate the observation that high-intensity work conditions lead to greater movement pattern variations and increased fatigue.
When comparing different work types, all pairwise comparisons showed significant differences. The comparison between masonry and carrying work revealed significant differences (t = −2.55, p = 0.0143), indicating that these tasks place different physical demands on workers. Similarly, masonry versus scaffold work (t = −0.84, p = 0.04045) and carrying versus scaffold work (t = 1.74, p = 0.0093) showed significant differences. The ANOVA result (F = 3.4, p = 0.039) confirms that different construction tasks produce significantly different DTW values.
The comparison between conditions with and without exoskeleton support revealed statistically significant differences across all work types. For masonry work, the difference was significant (t = −2.413017, p = 0.036948), indicating that exoskeleton support significantly reduced DTW values. Similar significant differences were observed in carrying work (t = −2.016126, p = 0.041602) and scaffold work (t = −1.709097, p = 0.020718). The ANOVA result (F = 3.390052, p = 0.015164) confirms the overall significant effect of exoskeleton support on reducing DTW values across all experimental conditions.
These statistical findings provide strong evidence that both work intensity and exoskeleton support significantly impact worker movement patterns. The negative t-values in the intensity comparisons indicate that higher intensity leads to increased DTW values, reflecting greater movement variability and potential fatigue. Similarly, the negative t-values in the robot assistance comparisons indicate that exoskeleton support reduces DTW values, demonstrating improved movement consistency. The statistical significance across all comparisons validates the visual observations from previous analyses and confirms that exoskeleton robots reduce worker fatigue across various construction tasks, with particularly strong effects in high-intensity conditions.
4. Discussion
4.1. Effectiveness of Exoskeleton Support Across Work Intensities
This study shows that exoskeleton support significantly reduces worker fatigue in a variety of construction tasks, with DTW values reduced by 15–25% depending on the type and intensity of the task. These results are consistent with previous studies reporting that exoskeletons delay fatigue accumulation by reducing muscle activation. However, this study goes beyond a controlled environment to validate these benefits in a real construction site, addressing the gap between laboratory and field performance.
The exoskeleton was particularly useful in physically demanding tasks, with the greatest improvements in scaffolding erection (25% DTW reduction for low-intensity tasks) and carrying (22% reduction for high-intensity tasks), which supports the findings of Schmaltz et al. [
21], who highlighted the effectiveness of exoskeletons in reducing back muscle strain during material handling.
The impact of the exoskeleton was more pronounced in high-intensity tasks, and statistical analysis confirmed that there was a significant difference between conditions with and without support (p < 0.05). Time series analysis showed that the exoskeleton slowed fatigue accumulation, reducing the increase in DTW per 10 min intervals from 7 to 8 to 5 to 6. This suggests that the use of an exoskeleton can increase the amount of safe work time before a break, which has practical implications for task scheduling and safety management. Additionally, exoskeletons helped maintain stable movement patterns by mitigating compensatory motions typically caused by fatigue, reinforcing their value in physically intensive construction tasks.
4.2. Practical Applications and Implementation Considerations
The task-specific and intensity-dependent benefits of exoskeleton support identified in this study have important implications for practical implementation in construction environments. The significant improvements in movement consistency observed in carrying and scaffold work suggest that prioritizing exoskeleton deployment for these task types could maximize safety benefits while optimizing resource allocation.
The distribution analysis of DTW values provides additional implementation guidance. The narrower distributions observed with exoskeleton support indicate more standardized movement patterns across workers. This standardization could facilitate more precise safety protocols and training programs, potentially enhancing overall workplace safety beyond individual fatigue reduction. The consistent statistical significance across all work types (p < 0.05) reinforces the reliability of these patterns as a basis for implementation decisions.
However, the concerns raised by Liu et al. [
24] regarding deteriorated robot control performance in high-temperature and humid environments and by Ojha et al. [
25] regarding balance control on irregular ground conditions remain relevant considerations for field implementation. Our study was conducted under typical construction site conditions, but extreme environmental factors might further modify exoskeleton effectiveness. Future implementations should incorporate environmental monitoring and possibly adaptive control mechanisms to maintain performance across varying conditions.
4.3. Methodological Contributions and Future Research Directions
This study makes an important methodological contribution by utilizing IMU sensors and DTW algorithms for objective fatigue assessment in construction environments. Unlike traditional subjective surveys and observational methods, our approach provides real-time and quantifiable insights into fatigue accumulation. The use of waist-mounted sensors allowed for a comprehensive analysis of full-body movement dynamics, while the DTW algorithm effectively quantified movement pattern consistency as an indicator of fatigue. Our findings align with, Jo and Kim [
30,
31] by applying DTW-based analysis in a field setting. Moreover, unlike Nassour et al. [
19], who tested in a laboratory, our results validate exoskeleton benefits in real construction environments. The significant correlation between DTW values and task intensity further supports the reliability of this method, extending prior research on motion pattern analysis and fatigue assessment. The significant correlation between DTW values and task intensity further supports the reliability of this method, extending prior research on motion pattern analysis and fatigue assessment.
Despite these strengths, certain limitations must be acknowledged. The study focused on three common construction tasks, and exoskeleton effectiveness may vary for other task types. Additionally, individual differences in physical condition, work experience, and adaptation to exoskeleton support were not analyzed in depth. This study did not control confounding variables such as baseline fitness, prior construction experience, or adaptation to exoskeleton use. Although all participants shared similar occupational backgrounds, individual differences may have influenced fatigue responses. Future studies should include pre-assessments of physical condition and standardized adaptation periods to strengthen internal validity. Furthermore, this short-term experimental design could not assess long-term effects such as potential adaptation or dependency on exoskeleton use. This study also did not analyze the influence of environmental factors (e.g., temperature, humidity, and ground surface), although such conditions may affect exoskeleton performance. Future studies will aim to incorporate diverse site environments to evaluate contextual effects on fatigue and robotic assistance.
Future research should address these limitations by investigating long-term impacts and expanding the range of evaluated construction tasks to enhance generalizability. Integrating physiological measurements (e.g., heart rate variability and electromyography) with movement pattern analysis could improve fatigue detection accuracy and provide deeper insights into the mechanisms of fatigue reduction. Also, future research should also explore posture correction strategies using sensor-based assessments or real-time feedback systems to promote ergonomic movement and reduce musculoskeletal risk. Additionally, developing exoskeletons that respond to real-time fatigue indicators could optimize support levels based on individual needs and task demands, improving both effectiveness and user acceptance in construction environments.
5. Conclusions
This study quantitatively demonstrated the effectiveness of exoskeletons in reducing worker fatigue across various construction tasks using IMU sensors and DTW algorithms. Exoskeleton use led to a 15–25% reduction in DTW values, with the most significant improvements observed in scaffold installation (25%) and material transportation (22%), highlighting their benefits in tasks requiring complex movements and heavy loads.
Time-series analysis further revealed that exoskeletons not only lowered overall fatigue levels but also slowed fatigue accumulation, reducing the DTW increase per 10 min interval from 7–8 points to 5–6 points. Additionally, the narrower DTW distribution with exoskeleton support suggests more consistent movement patterns, potentially improving workplace safety and efficiency.
Methodologically, this study contributes by validating IMU sensors and DTW algorithms as objective tools for real-time fatigue assessment, overcoming the limitations of subjective surveys. Future research should explore long-term effects, optimize exoskeleton designs for diverse tasks, and integrate physiological measurements for more precise fatigue detection. Advancements in adaptive exoskeletons that respond to real-time fatigue indicators could further enhance worker safety and efficiency.
In conclusion, this research underscores the potential of exoskeleton technology to mitigate worker fatigue, supporting its role as a viable solution for improving safety and productivity in construction environments.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}