
An Improved Gaussian Mixture Model-Based Data Normalization Method for Removing Environmental Effects on Damage Detection of Structures


Abstract
1. Introduction
2. Methodology
2.1. A Review of GMM
2.2. The Proposed iGMM
2.3. Data Normalization
2.4. Damage Indicator and Threshold
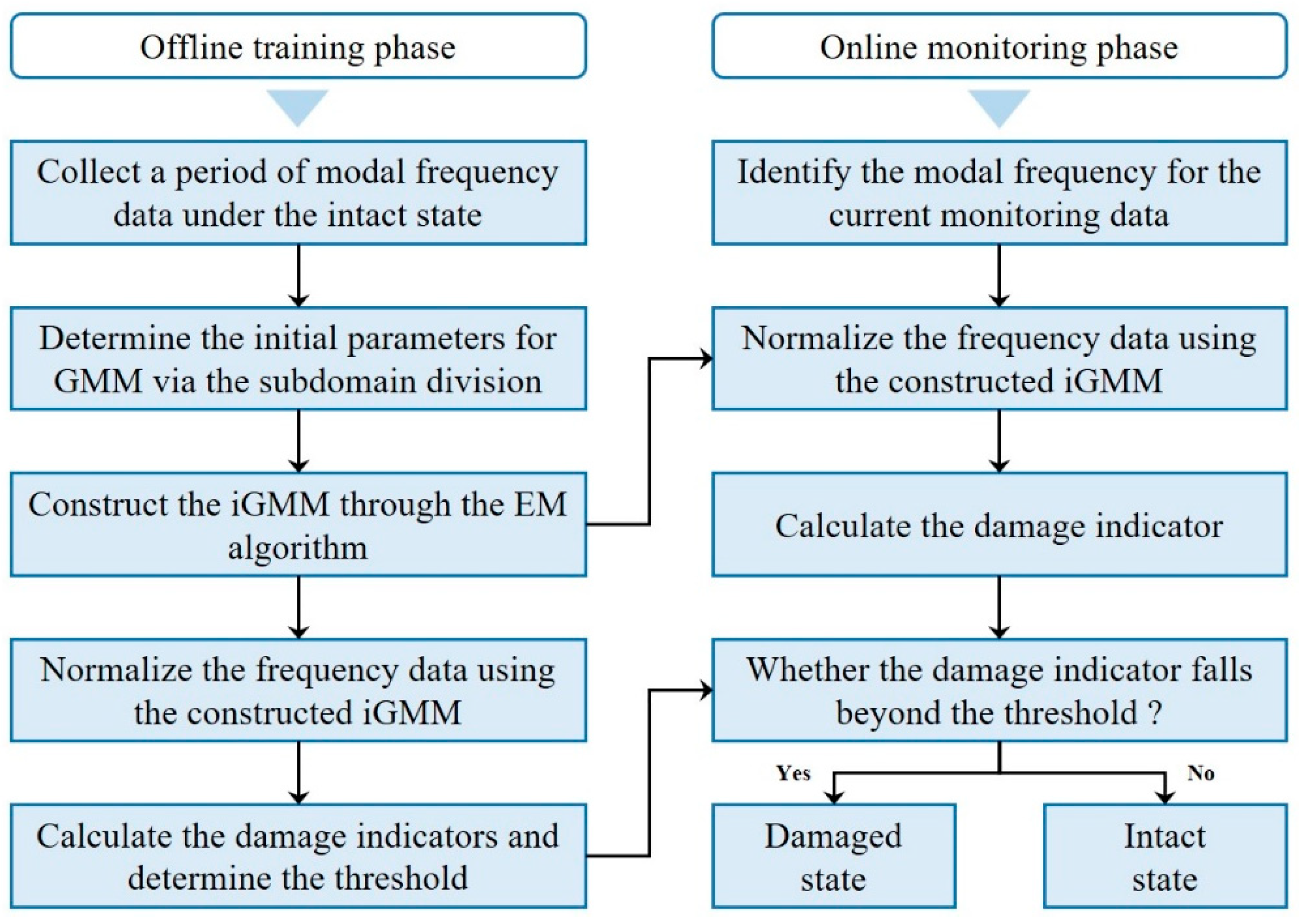
2.5. Implementation Procedure
3. Case Studies
3.1. Case Study Using Numerical Simulation
3.2. Case Study Using the Z24 Bridge Data
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Avci, O.; Abdeljaber, O.; Kiranyaz, S.; Hussein, M.; Gabbouj, M.; Inman, D.J. A review of vibration-based damage detection in civil structures: From traditional methods to machine learning and deep learning applications. Mech. Syst. Signal Process. 2021, 147, 107077. [Google Scholar] [CrossRef]
- Hou, R.; Xia, Y. Review on the new development of vibration-based damage identification for civil engineering structures: 2010–2019. J. Sound Vib. 2021, 491, 115741. [Google Scholar] [CrossRef]
- Xiao, F.; Mao, Y.; Sun, H.; Chen, G.S.; Tian, G. Stiffness Separation Method for Reducing Calculation Time of Truss Structure Damage Identification. Struct. Control Health Monit. 2024, 2024, 5171542. [Google Scholar] [CrossRef]
- Xiao, F.; Mao, Y.; Tian, G.; Chen, G.S. Partial-Model-Based Damage Identification of Long-Span Steel Truss Bridge Based on Stiffness Separation Method. Struct. Control Health Monit. 2024, 2024, 5530300. [Google Scholar] [CrossRef]
- Xiao, F.; Sun, H.; Mao, Y.; Chen, G.S. Damage identification of large-scale space truss structures based on stiffness separation method. Structures 2023, 53, 109–118. [Google Scholar] [CrossRef]
- Figueiredo, E.; Radu, L.; Worden, K.; Farrar, C.R. A Bayesian approach based on a Markov-chain Monte Carlo method for damage detection under unknown sources of variability. Eng. Struct. 2014, 80, 1–10. [Google Scholar] [CrossRef]
- Ubertini, F.; Comanducci, G.; Cavalagli, N. Vibration-based structural health monitoring of a historic bell-tower using output-only measurements and multivariate statistical analysis. Struct. Health Monit. 2016, 15, 438–457. [Google Scholar] [CrossRef]
- Cantero, D.; Hester, D.; Brownjohn, J. Evolution of bridge frequencies and modes of vibration during truck passage. Eng. Struct. 2017, 152, 452–464. [Google Scholar] [CrossRef]
- Roy, K.; Samit, R.C. Fundamental mode shape and its derivatives in structural damage localization. J. Sound Vib. 2013, 332, 5584–5593. [Google Scholar] [CrossRef]
- Frigui, F.; Faye, J.P.; Martin, C.; Dalverny, O.; Peres, F.; Judenherc, S. Global methodology for damage detection and localization in civil engineering structures. Eng. Struct. 2018, 171, 686–695. [Google Scholar] [CrossRef]
- Cui, H.Y.; Xu, X.; Peng, W.Q.; Zhou, Z.; Hong, M. A damage detection method based on strain modes for structures under ambient excitation. Measurement 2018, 125, 438–446. [Google Scholar] [CrossRef]
- Bhuyan, M.D.H.; Gautier, G.; Le Touz, N.; Döhler, M.; Hille, F.; Dumoulin, J.; Mevel, L. Vibration-based damage localization with load vectors under temperature changes. Struct. Control Health Monit. 2019, 26, e2439. [Google Scholar] [CrossRef]
- Wah, W.S.L.; Chen, Y.T.; Owen, J.S. A regression-based damage detection method for structures subjected to changing environmental and operational conditions. Eng. Struct. 2021, 228, 111462. [Google Scholar]
- Liu, C.; DeWolf, J.T. Effect of temperature on modal variability of a curved concrete bridge under ambient loads. J. Struct. Eng. 2007, 133, 1742–1751. [Google Scholar] [CrossRef]
- Kim, J.T.; Park, J.H.; Lee, B.J. Vibration-based damage monitoring in model plate-girder bridges under uncertain temperature conditions. Eng. Struct. 2007, 29, 1354–1365. [Google Scholar] [CrossRef]
- Cross, E.J.; Koo, K.Y.; Brownjohn, J.M.W.; Worden, K. Long-term monitoring and data analysis of the Tamar Bridge. Mech. Syst. Signal Process. 2013, 35, 16–34. [Google Scholar] [CrossRef]
- Han, Q.; Ma, Q.; Xu, J.; Liu, M. Structural health monitoring research under varying temperature condition: A review. J. Civ. Struct. Health Monit. 2021, 11, 149–173. [Google Scholar] [CrossRef]
- Wang, Z.; Yang, D.H.; Yi, T.H.; Zhang, G.H.; Han, J.G. Eliminating environmental and operational effects on structural modal frequency: A comprehensive review. Struct. Control Health Monit. 2022, 29, e3073. [Google Scholar] [CrossRef]
- Peeters, B.; De Roeck, G. One-year monitoring of the Z24-Bridge: Environmental effects versus damage events. Earthq. Eng. Struct. Dyn. 2001, 30, 149–171. [Google Scholar] [CrossRef]
- Moser, P.; Moaveni, B. Environmental effects on the identified natural frequencies of the Dowling Hall Footbridge. Mech. Syst. Signal Process. 2011, 25, 2336–2357. [Google Scholar] [CrossRef]
- Hu, W.H.; Cunha, A.; Caetano, E.; Rohrmann, R.G.; Said, S.; Teng, J. Comparison of different statistical approaches for removing environmental/operational effects for massive data continuously collected from footbridges. Struct. Control Health Monit. 2017, 24, e1955. [Google Scholar] [CrossRef]
- Ni, Y.Q.; Zhou, H.F.; Ko, J.M. Generalization capability of neural network models for temperature-frequency correlation using monitoring data. J. Struct. Eng. 2009, 135, 1290–1300. [Google Scholar] [CrossRef]
- Worden, K.; Cross, E.J. On switching response surface models, with applications to the structural health monitoring of bridges. Mech. Syst. Signal Process. 2018, 98, 139–156. [Google Scholar] [CrossRef]
- Ma, K.C.; Yi, T.H.; Yang, D.H.; Li, H.N.; Liu, H. Multiorder detection of bridge modal-frequency anomalies considering multiple environmental factors. J. Perform. Constr. Facil. 2022, 36, 04022046. [Google Scholar] [CrossRef]
- Prawin, J.; Lakshmi, K.; Rao, A.R.M. Structural damage diagnosis under varying environmental conditions with very limited measurements. J. Intell. Mater. Syst. Struct. 2020, 31, 665–686. [Google Scholar] [CrossRef]
- Yan, A.M.; Kerschen, G.; De Boe, P.; Golinval, J.C. Structural damage diagnosis under varying environmental conditions—Part I: A linear analysis. Mech. Syst. Signal Process. 2005, 19, 847–864. [Google Scholar] [CrossRef]
- Sen, D.; Erazo, K.; Zhang, W.; Nagarajaiah, S.; Sun, L. On the effectiveness of principal component analysis for decoupling structural damage and environmental effects in bridge structures. J. Sound Vib. 2019, 457, 280–298. [Google Scholar] [CrossRef]
- Yan, A.M.; Kerschen, G.; De Boe, P.; Golinval, J.C. Structural damage diagnosis under varying environmental conditions—Part II: Local PCA for non-linear cases. Mech. Syst. Signal Process. 2005, 19, 865–880. [Google Scholar] [CrossRef]
- Zhou, H.F.; Ni, Y.Q.; Ko, J.M. Structural damage alarming using auto-associative neural network technique: Exploration of environment-tolerant capacity and setup of alarming threshold. Mech. Syst. Signal Process. 2011, 25, 1508–1526. [Google Scholar] [CrossRef]
- Ozdagli, A.I.; Koutsoukos, X. Machine learning based novelty detection using modal analysis. Comput.-Aided Civ. Infrastruct. Eng. 2019, 34, 1119–1140. [Google Scholar] [CrossRef]
- Maes, K.; Van Meerbeeck, L.; Reynders, E.P.B.; Lombaert, G. Validation of vibration-based structural health monitoring on retrofitted railway bridge KW51. Mech. Syst. Signal Process. 2022, 165, 108380. [Google Scholar] [CrossRef]
- Cross, E.J.; Worden, K.; Chen, Q. Cointegration: A novel approach for the removal of environmental trends in structural health monitoring data. Proc. R. Soc. A 2011, 467, 2712–2732. [Google Scholar] [CrossRef]
- Worden, K.; Cross, E.J.; Antoniadou, I.; Kyprianou, A. A multiresolution approach to cointegration for enhanced SHM of structures under varying conditions–an exploratory study. Mech. Syst. Signal Process. 2014, 47, 243–262. [Google Scholar] [CrossRef]
- Mousavi, M.; Gandomi, A.H. Prediction error of Johansen cointegration residuals for structural health monitoring. Mech. Syst. Signal Process. 2021, 160, 107847. [Google Scholar] [CrossRef]
- Dervilis, N.; Antoniadou, I.; Cross, E.J.; Worden, K. A non-linear manifold strategy for SHM approaches. Strain 2015, 51, 324–331. [Google Scholar] [CrossRef]
- Peng, Z.; Li, J.; Hao, H. Structural damage detection via phase space based manifold learning under changing environmental and operational conditions. Eng. Struct. 2022, 263, 114420. [Google Scholar] [CrossRef]
- Zang, J.G.; Huang, H.B.; Sun, Z.G.; Wang, D.S. Subdomain principal component analysis for damage detection of structures subjected to changing environments. Eng. Struct. 2023, 288, 116265. [Google Scholar] [CrossRef]
- Shi, H.; Worden, K.; Cross, E.J. A regime-switching cointegration approach for removing environmental and operational variations in structural health monitoring. Mech. Syst. Signal Process. 2018, 103, 381–397. [Google Scholar] [CrossRef]
- Wang, Z.; Yi, T.H.; Yang, D.H.; Zhou, P.; Sun, L. Early warning method of structural damage using localized frequency cointegration under changing environments. J. Struct. Eng. 2023, 149, 04022230. [Google Scholar] [CrossRef]
- Huang, J.Z.; Li, D.S.; Li, H.N. A new regime-switching cointegration method for structural health monitoring under changing environmental and operational conditions. Measurement 2023, 212, 112682. [Google Scholar] [CrossRef]
- Huang, J.Z.; Yuan, S.J.; Li, D.S.; Li, H.N. A kernel canonical correlation analysis approach for removing environmental and operational variations for structural damage identification. J. Sound Vib. 2023, 548, 117516. [Google Scholar] [CrossRef]
- Kullaa, J. Structural health monitoring under nonlinear environmental or operational influences. Shock Vib. 2014, 2014, 863494. [Google Scholar] [CrossRef]
- Figueiredo, M.A.T.; Jain, A.K. Unsupervised learning of finite mixture models. IEEE Trans. Pattern Anal. Mach. Intell. 2002, 24, 381–396. [Google Scholar] [CrossRef]
- Santos, A.; Silva, M.; Santos, R.; Figueiredo, E.; Sales, C.; Costa, J.C. A global expectation-maximization based on memetic swarm optimization for structural damage detection. Struct. Health Monit. 2016, 15, 610–625. [Google Scholar] [CrossRef]
- Santos, A.; Figueiredo, E.; Silva, M.; Santos, R.; Sales, C.; Costa, J.C. Genetic-based EM algorithm to improve the robustness of Gaussian mixture models for damage detection in bridges. Struct. Control Health Monit. 2017, 24, e1886. [Google Scholar] [CrossRef]
- Qiu, L.; Fang, F.; Yuan, S. Improved density peak clustering-based adaptive Gaussian mixture model for damage monitoring in aircraft structures under time-varying conditions. Mech. Syst. Signal Process. 2019, 126, 281–304. [Google Scholar] [CrossRef]
- Cubedo, M.; Oller, J.M. Hypothesis testing: A model selection approach. J. Stat. Plan. Inference 2002, 108, 3–21. [Google Scholar] [CrossRef]
- Verbeek, J.J.; Vlassis, N.; Kröse, B. Efficient greedy learning of Gaussian mixture models. Neural Comput. 2003, 15, 469–485. [Google Scholar] [CrossRef] [PubMed]
- Pernkopf, F.; Bouchaffra, D. Genetic-based EM algorithm for learning Gaussian mixture models. IEEE Trans. Pattern Anal. Mach. Intell. 2005, 27, 1344–1348. [Google Scholar] [CrossRef] [PubMed]
- Huang, H.B.; Yi, T.H.; Li, H.N.; Liu, H. New representative temperature for performance alarming of bridge expansion joints through temperature-displacement relationship. J. Bridge Eng. 2018, 23, 04018043. [Google Scholar] [CrossRef]
- Pei, X.Y.; Zhang, H.T.; Huang, H.B.; Liang, D. Probabilistic machine learning-based frequency normalization method for bridge damage detection considering environmental variations. Int. J. Struct. Stab. Dyn. 2024. [Google Scholar] [CrossRef]
- Huang, H.B.; Yi, T.H.; Li, H.N.; Liu, H. Sparse Bayesian identification of temperature-displacement model for performance assessment and early warning of bridge bearings. J. Struct. Eng. 2022, 148, 04022052. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cumulative Statistic | Damage Detection Rate (%) | ||||
|---|---|---|---|---|---|
| Training | Test (Intact) | Test (Damage 1) | Test (Damage 2) | Test (Damage 3) | |
| 0.31 | 0.20 | 42.71 | 70.42 | 91.46 | |
| 0.24 | 0.20 | 81.88 | 93.96 | 100 | |
| 0.26 | 0.34 | 93.54 | 99.58 | 100 | |
| 0.27 | 0.34 | 96.04 | 100 | 100 | |
| Cumulative Statistic | Damage Detection Rate (%) | ||
|---|---|---|---|
| Training | Test (Intact State) | Test (Damaged State) | |
| 0.29 | 0.14 | 96.32 | |
| 0.29 | 0.00 | 98.92 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pei, X.-Y.; Huang, H.-B.; Cao, P. An Improved Gaussian Mixture Model-Based Data Normalization Method for Removing Environmental Effects on Damage Detection of Structures. Buildings 2025, 15, 359. https://doi.org/10.3390/buildings15030359
Pei X-Y, Huang H-B, Cao P. An Improved Gaussian Mixture Model-Based Data Normalization Method for Removing Environmental Effects on Damage Detection of Structures. Buildings. 2025; 15(3):359. https://doi.org/10.3390/buildings15030359
Chicago/Turabian StylePei, Xue-Yang, Hai-Bin Huang, and Peng Cao. 2025. "An Improved Gaussian Mixture Model-Based Data Normalization Method for Removing Environmental Effects on Damage Detection of Structures" Buildings 15, no. 3: 359. https://doi.org/10.3390/buildings15030359
APA StylePei, X.-Y., Huang, H.-B., & Cao, P. (2025). An Improved Gaussian Mixture Model-Based Data Normalization Method for Removing Environmental Effects on Damage Detection of Structures. Buildings, 15(3), 359. https://doi.org/10.3390/buildings15030359