
Rapid Seismic Damage Assessment in Densely Built Wooden Residential Areas Using 3D Point Cloud Measurement


Abstract
1. Introduction
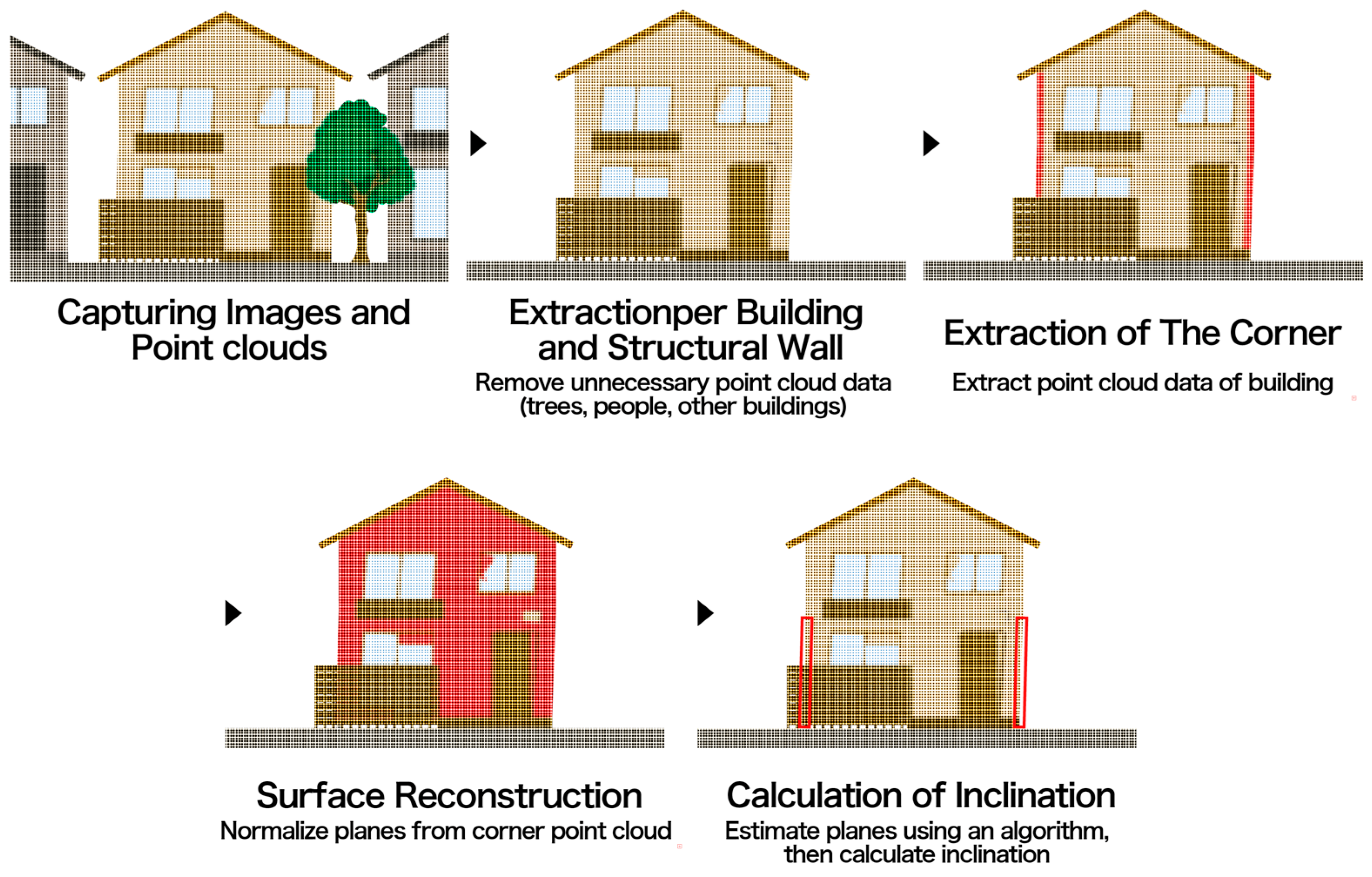
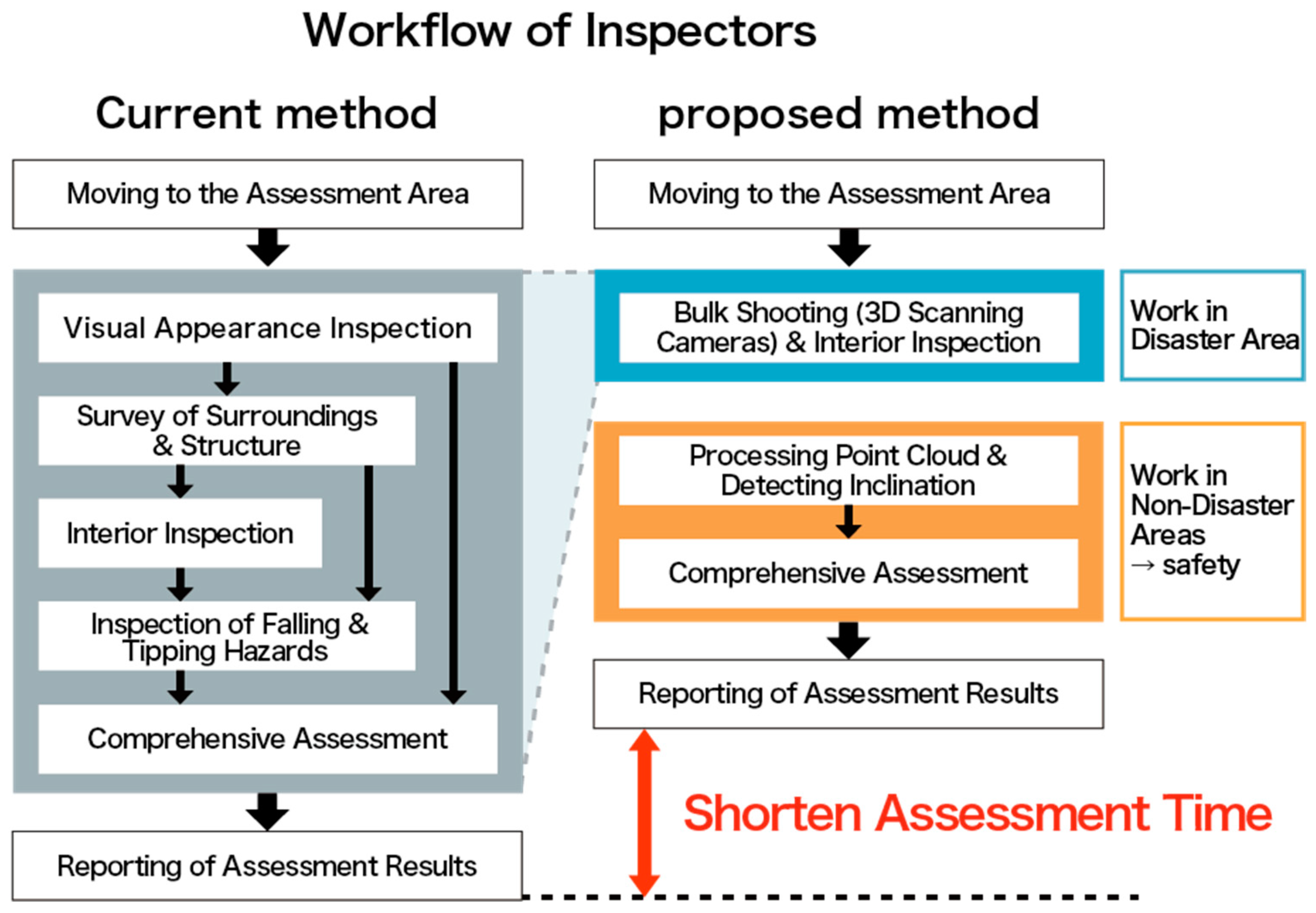
2. Equipment and Methodology
2.1. Research Flow
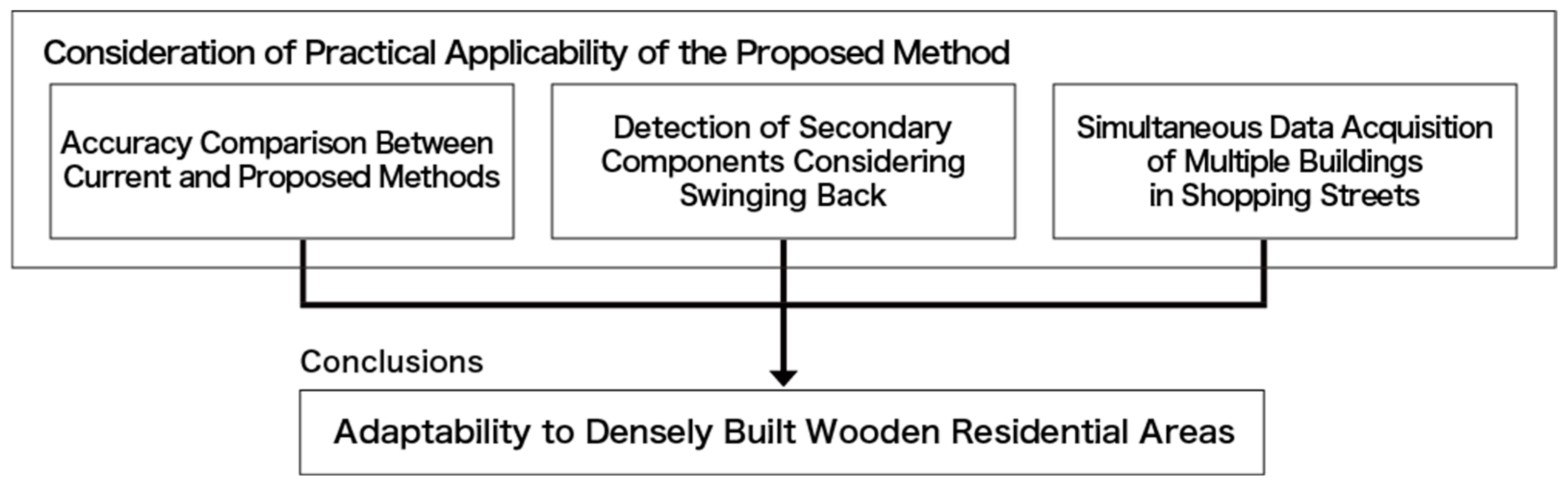
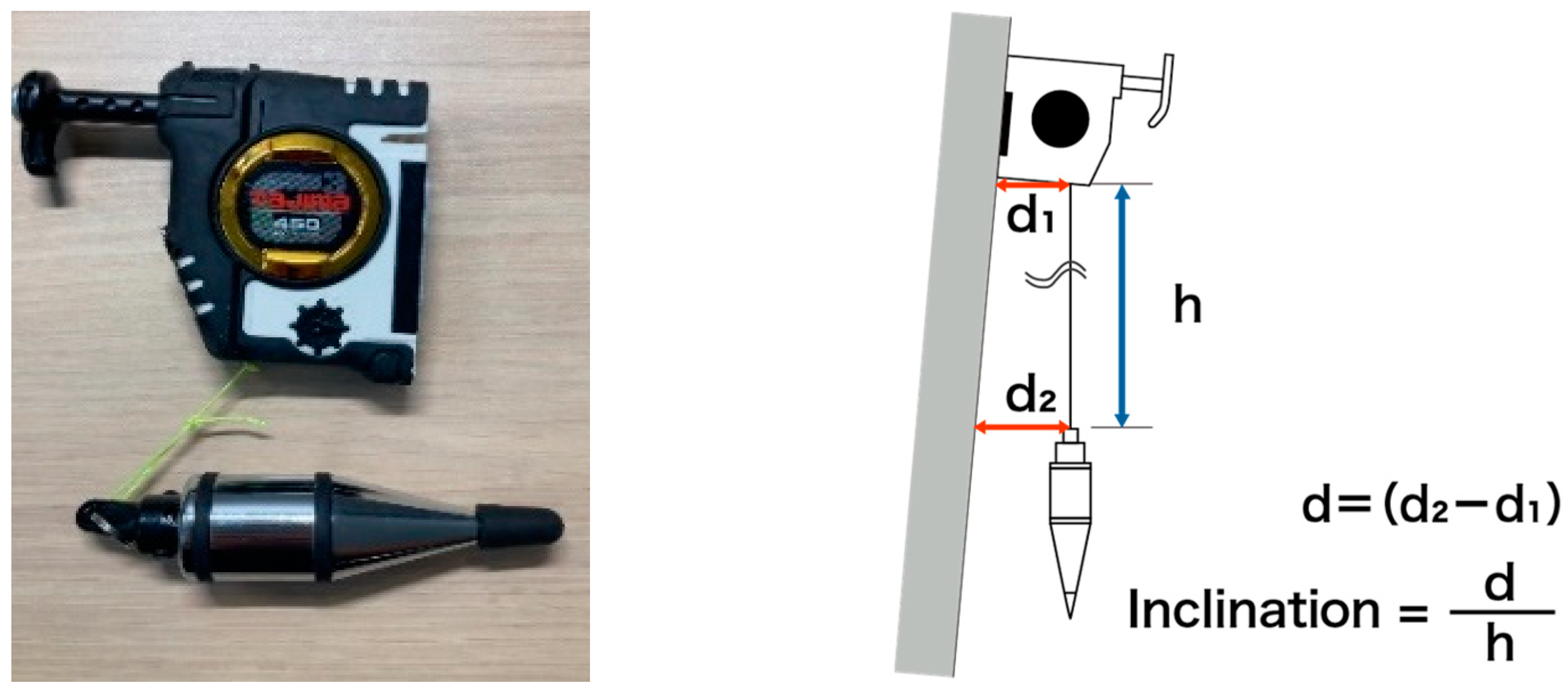
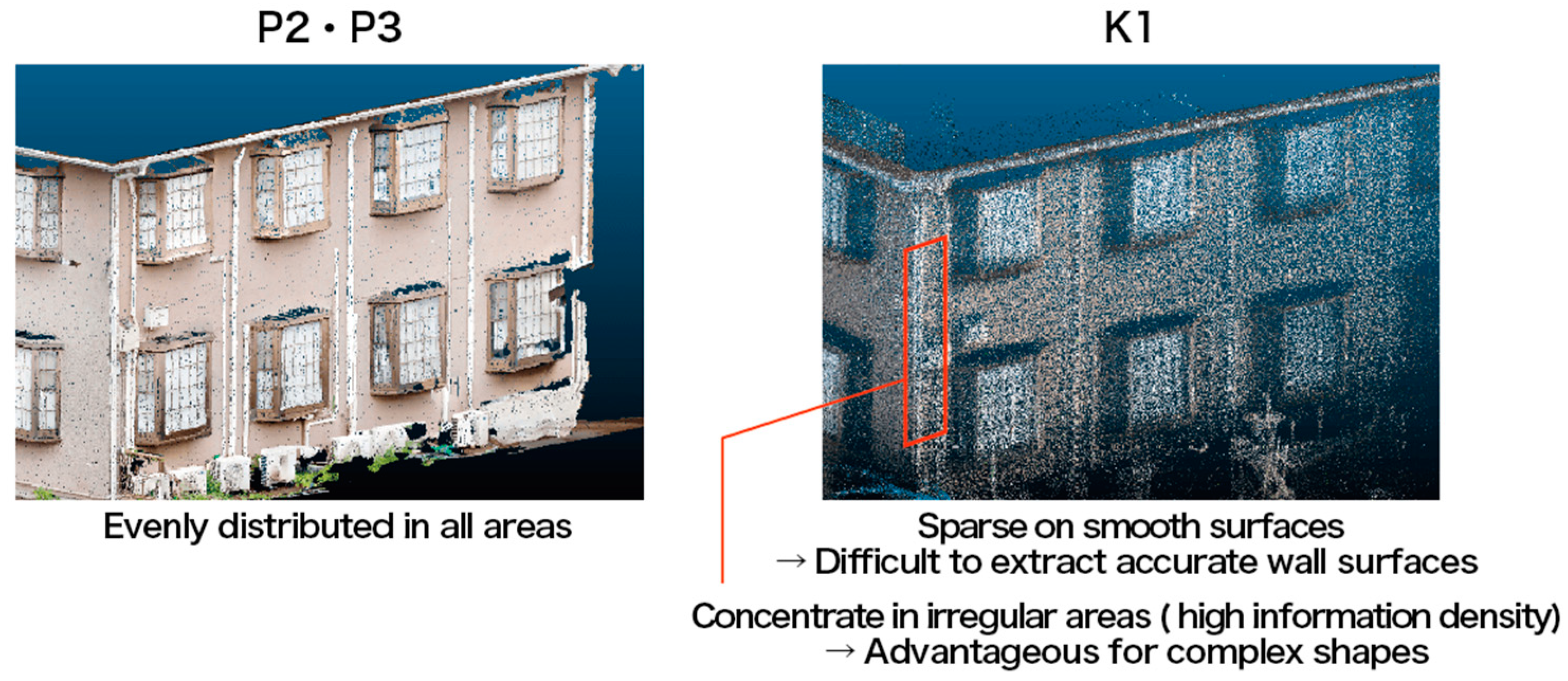
2.2. Accuracy Comparison Between Current and Proposed Methods
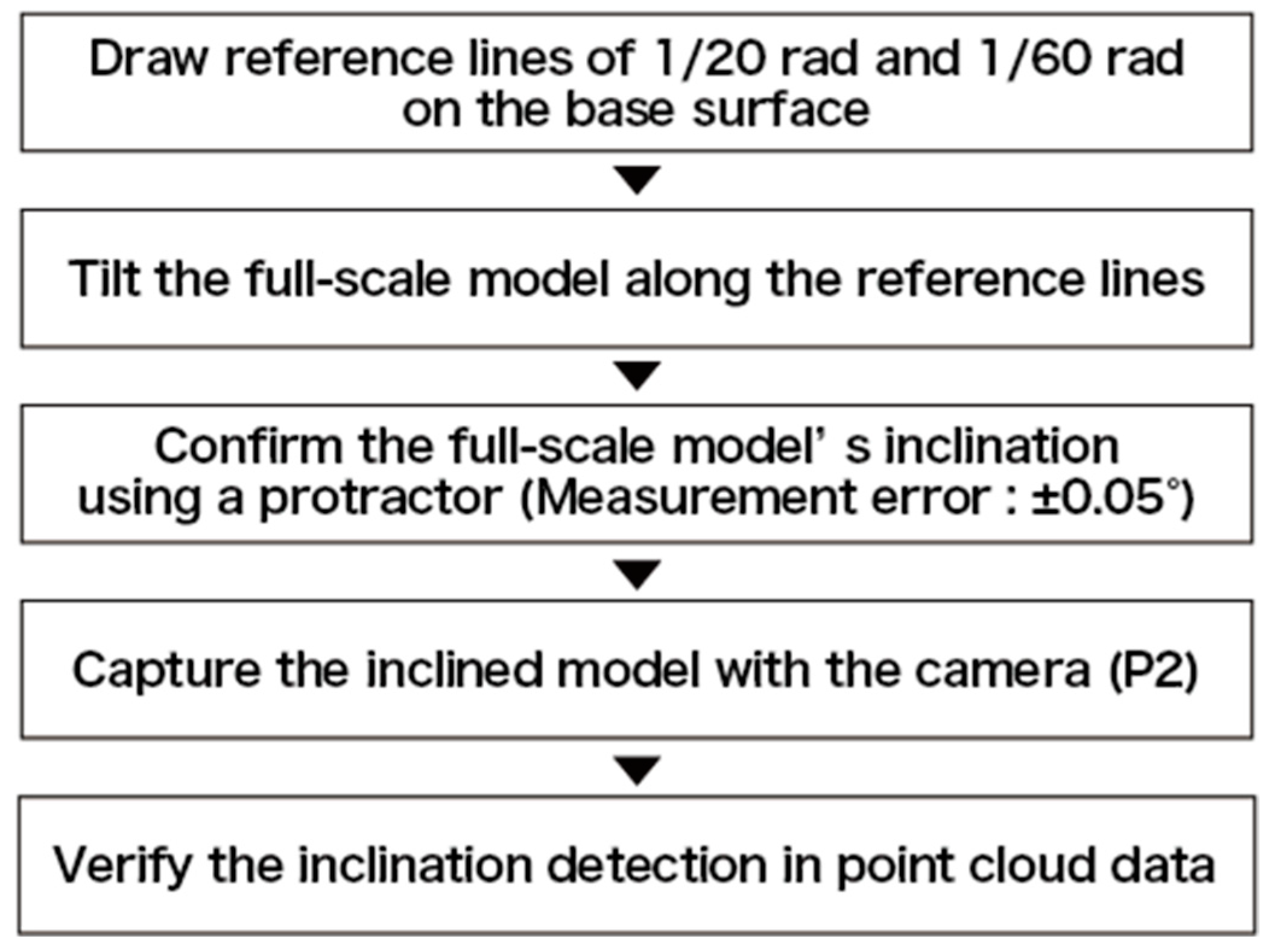
2.3. Detection of Secondary Components Considering Swinging Back
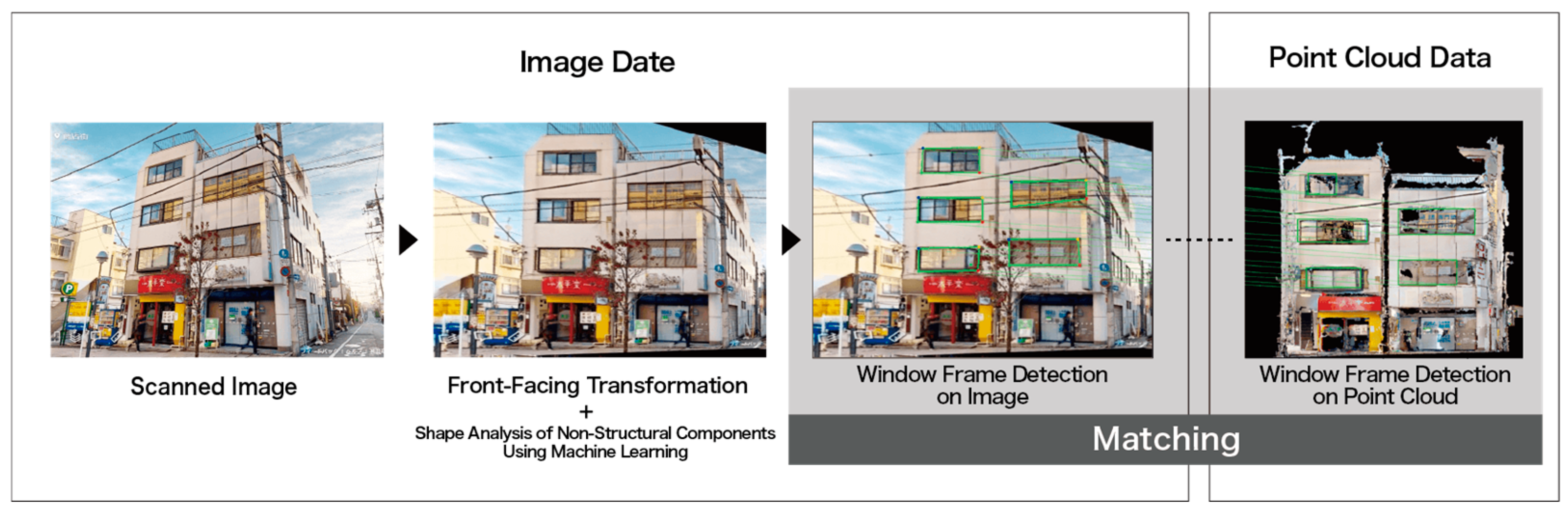
2.4. Simultaneous Data Acquisition of Multiple Buildings in Shopping Streets
3. Results and Discussion
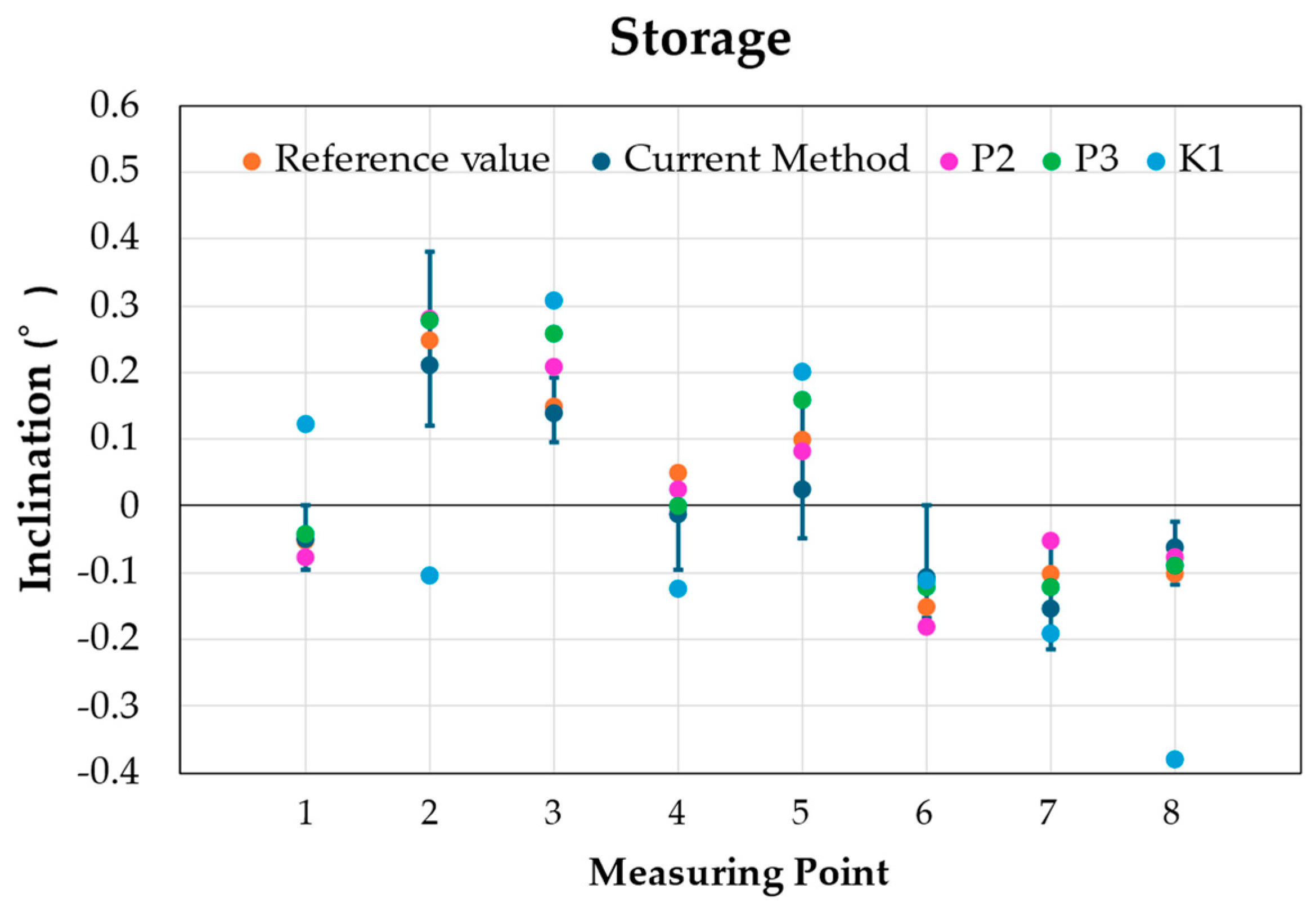
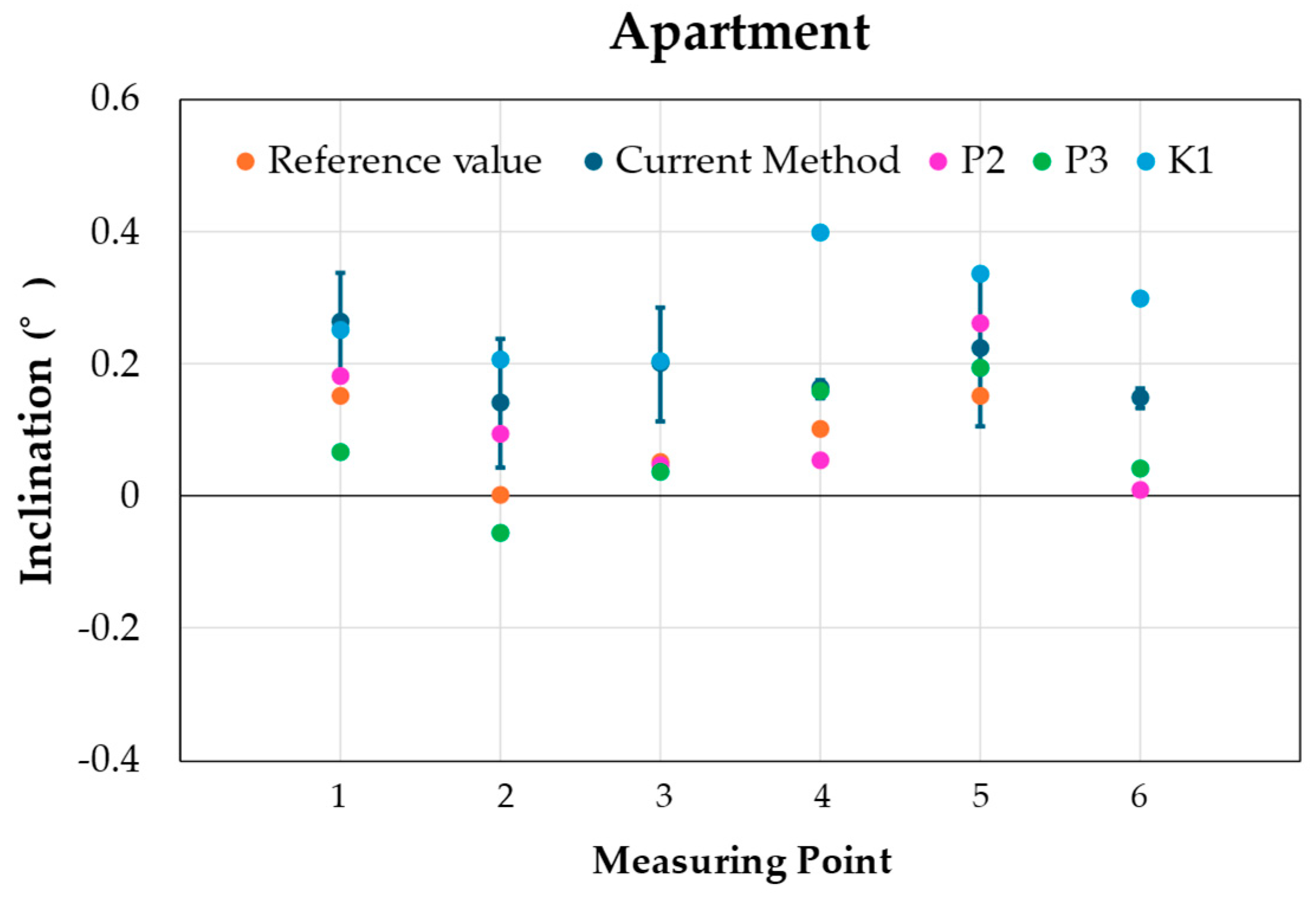
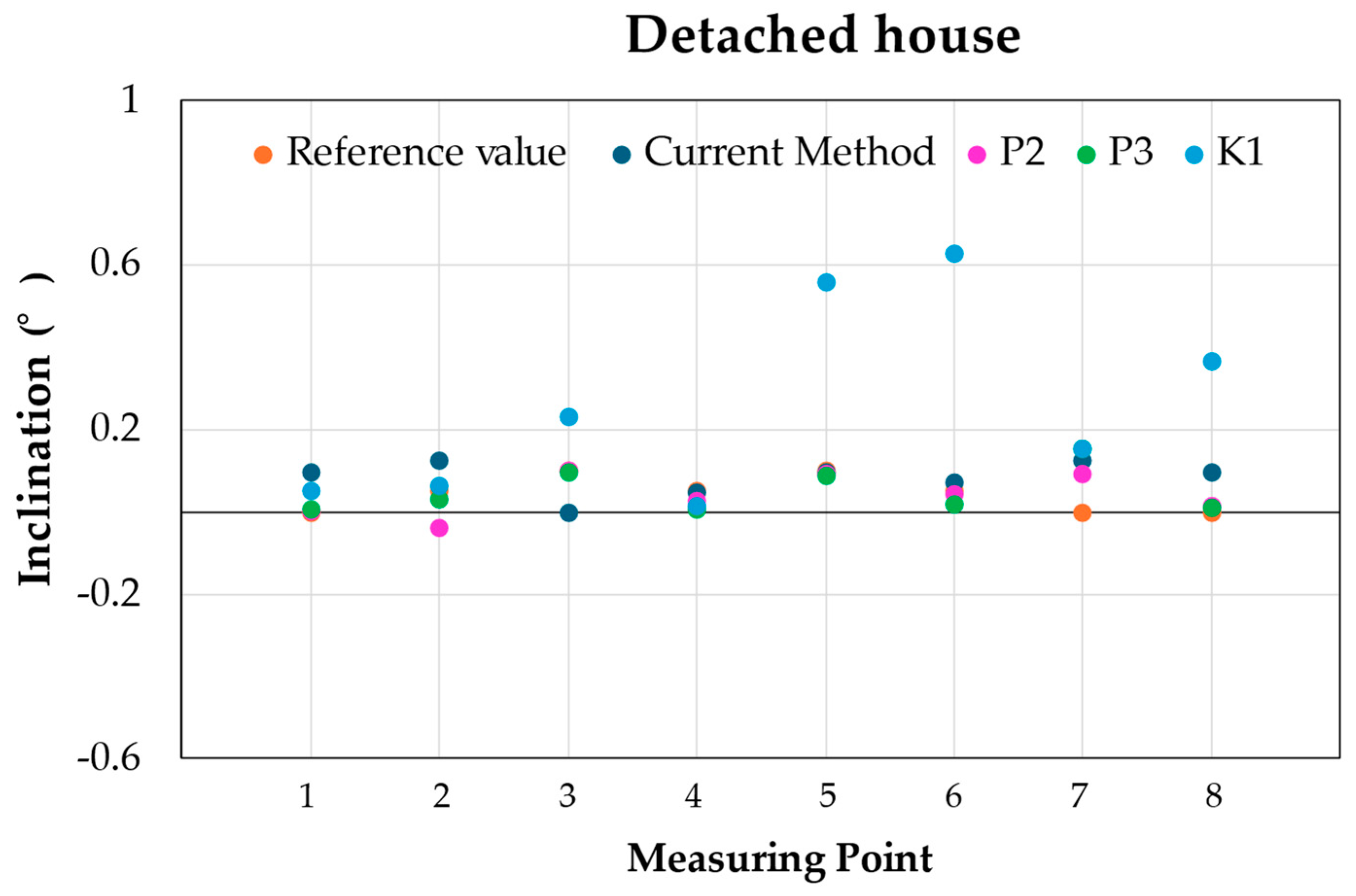
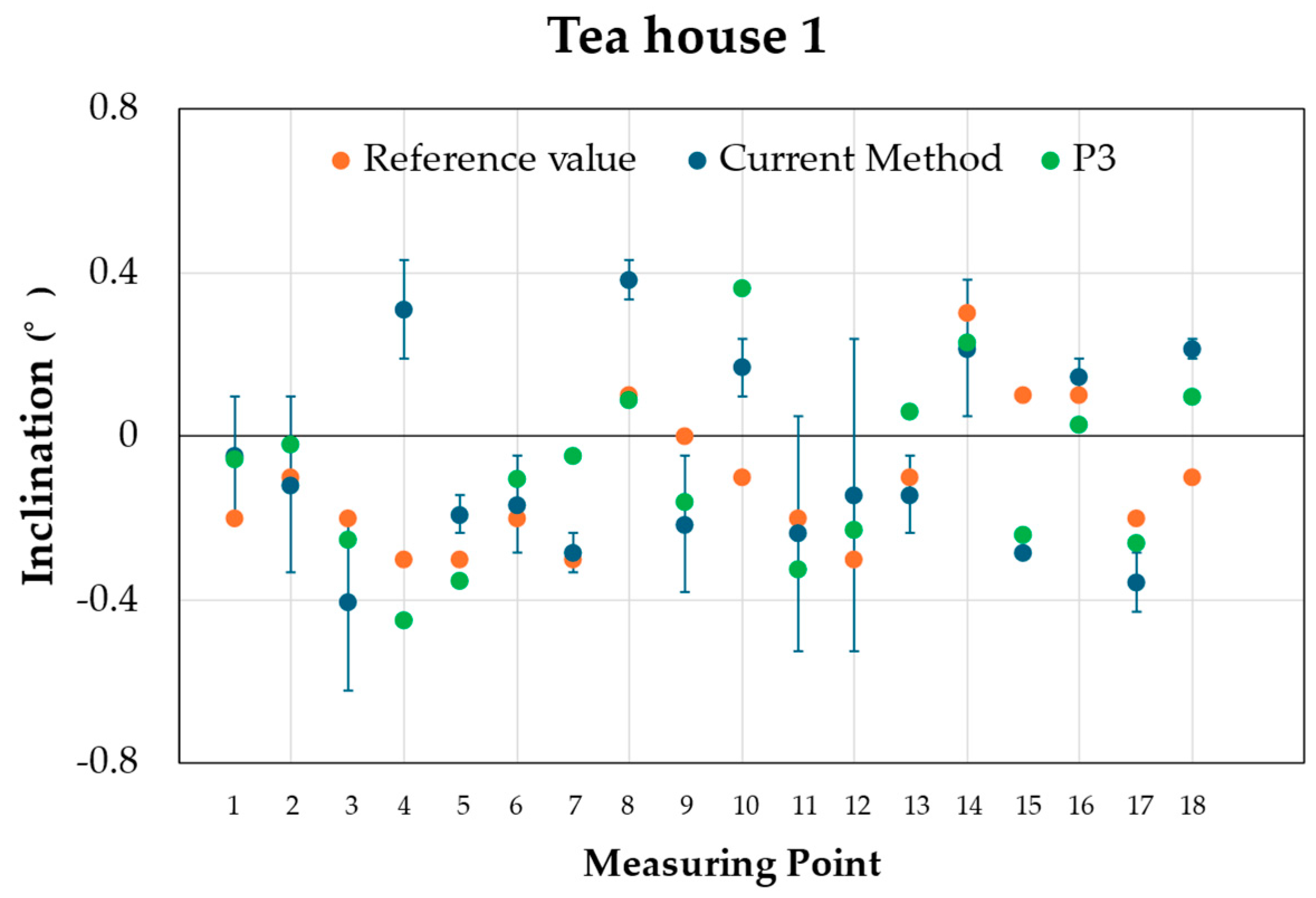
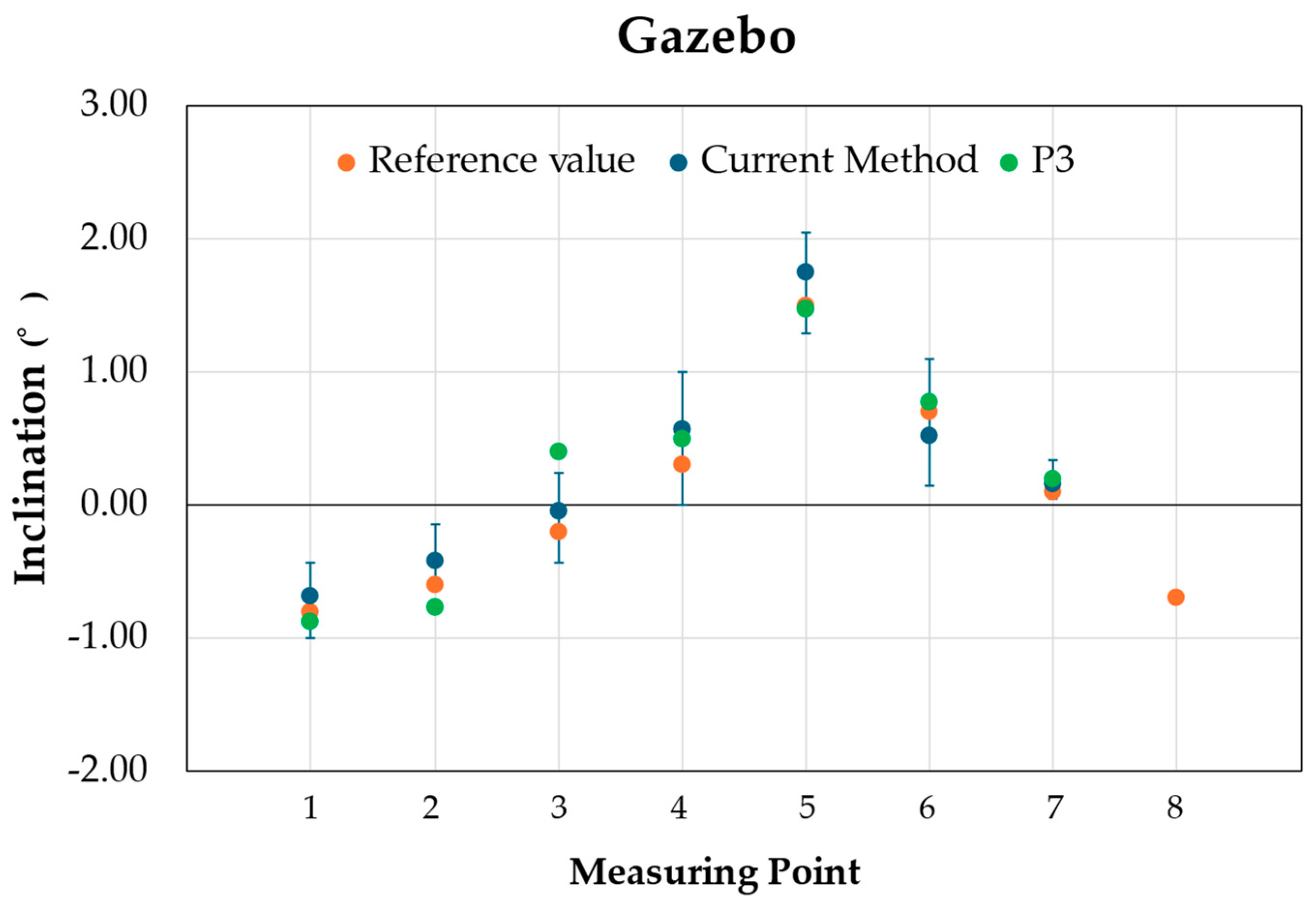
3.1. Accuracy Comparison Between Current and Proposed Methods
3.2. Detection of Secondary Members Considering Rebound
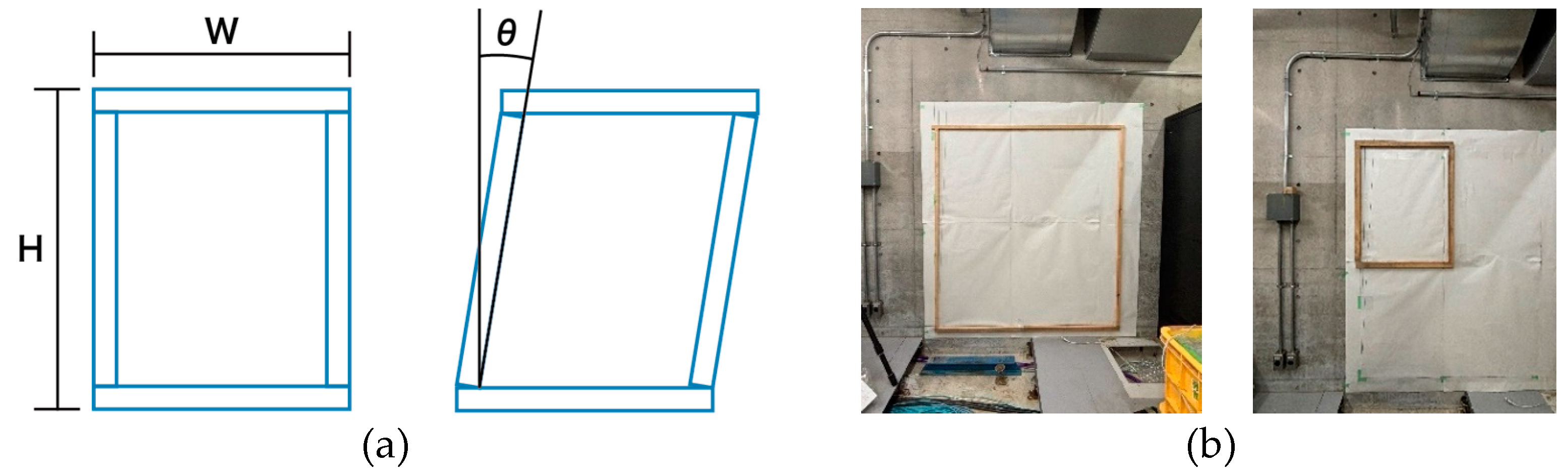
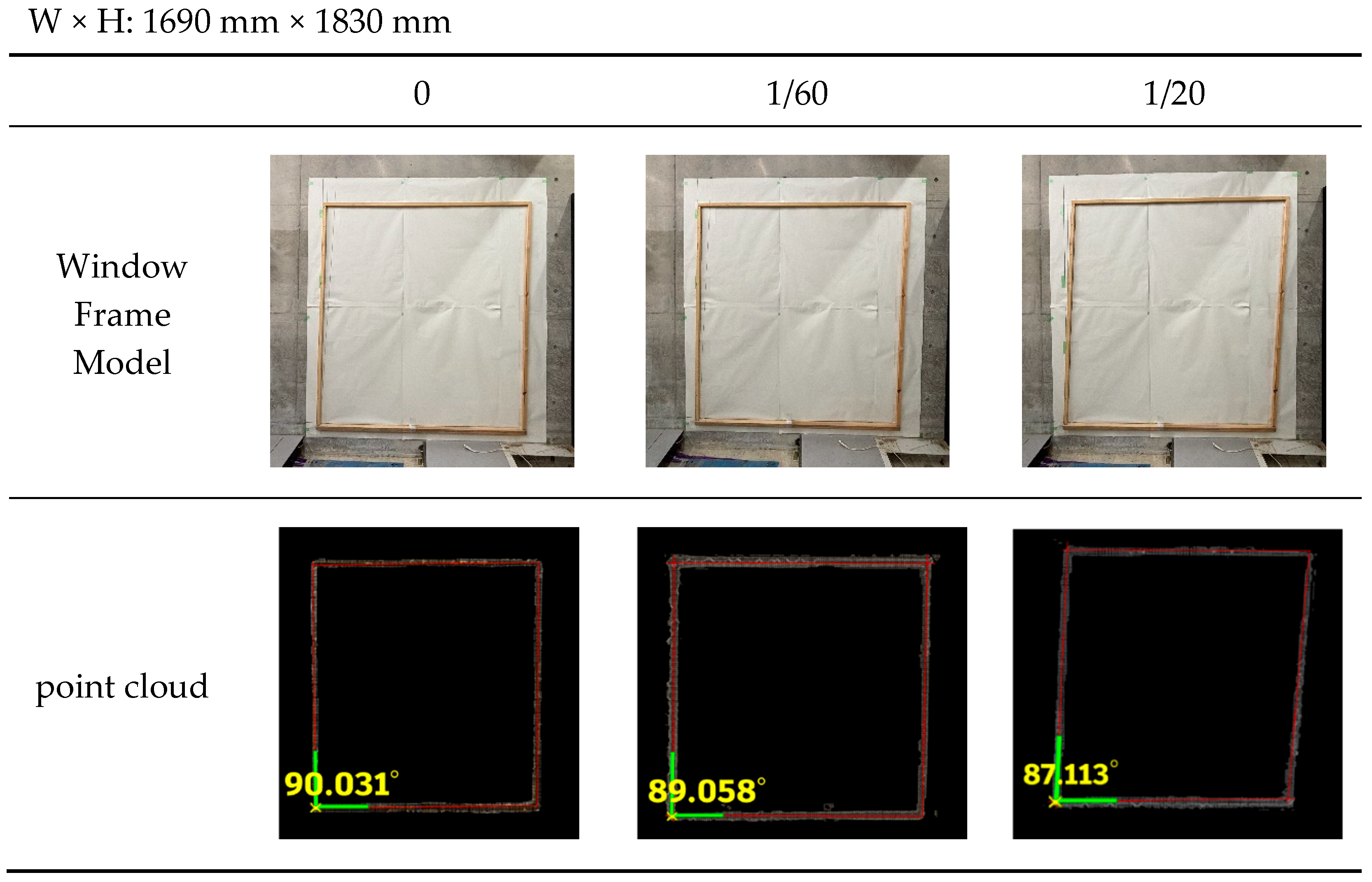
3.2.1. Full-Scale Window Frame Model
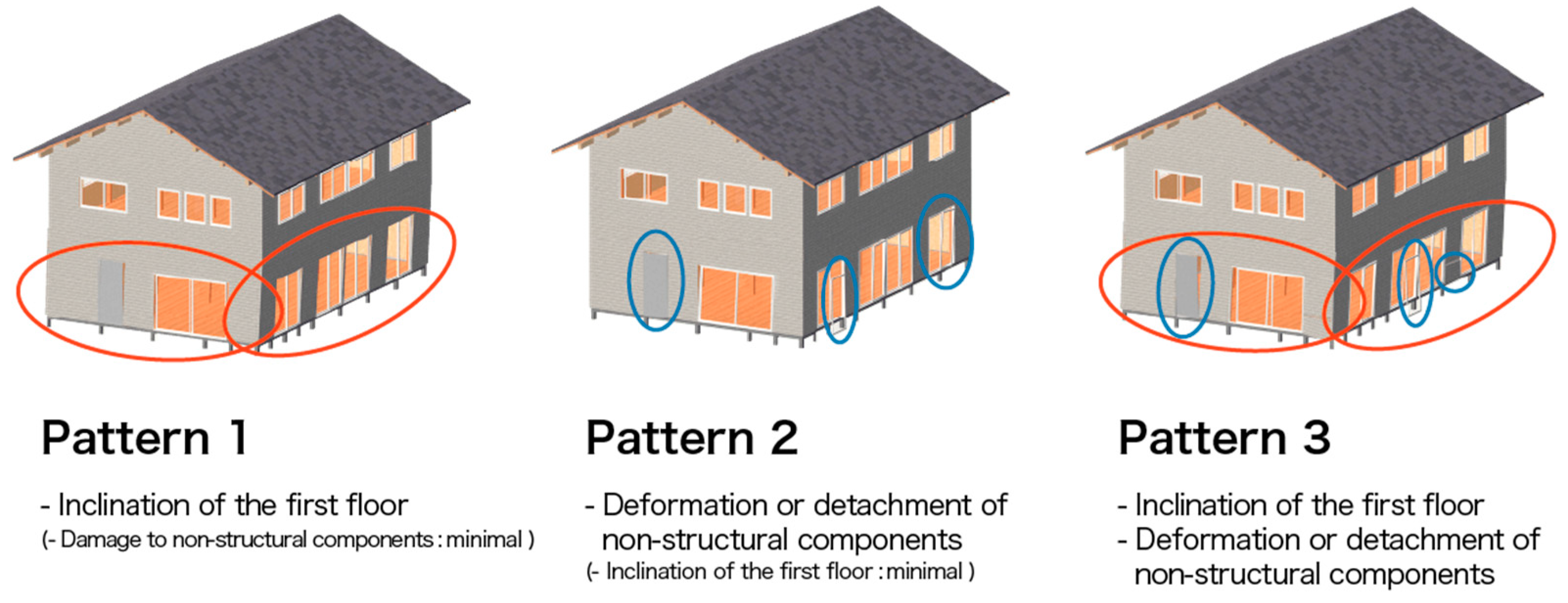
3.2.2. Three-Dimensional Model
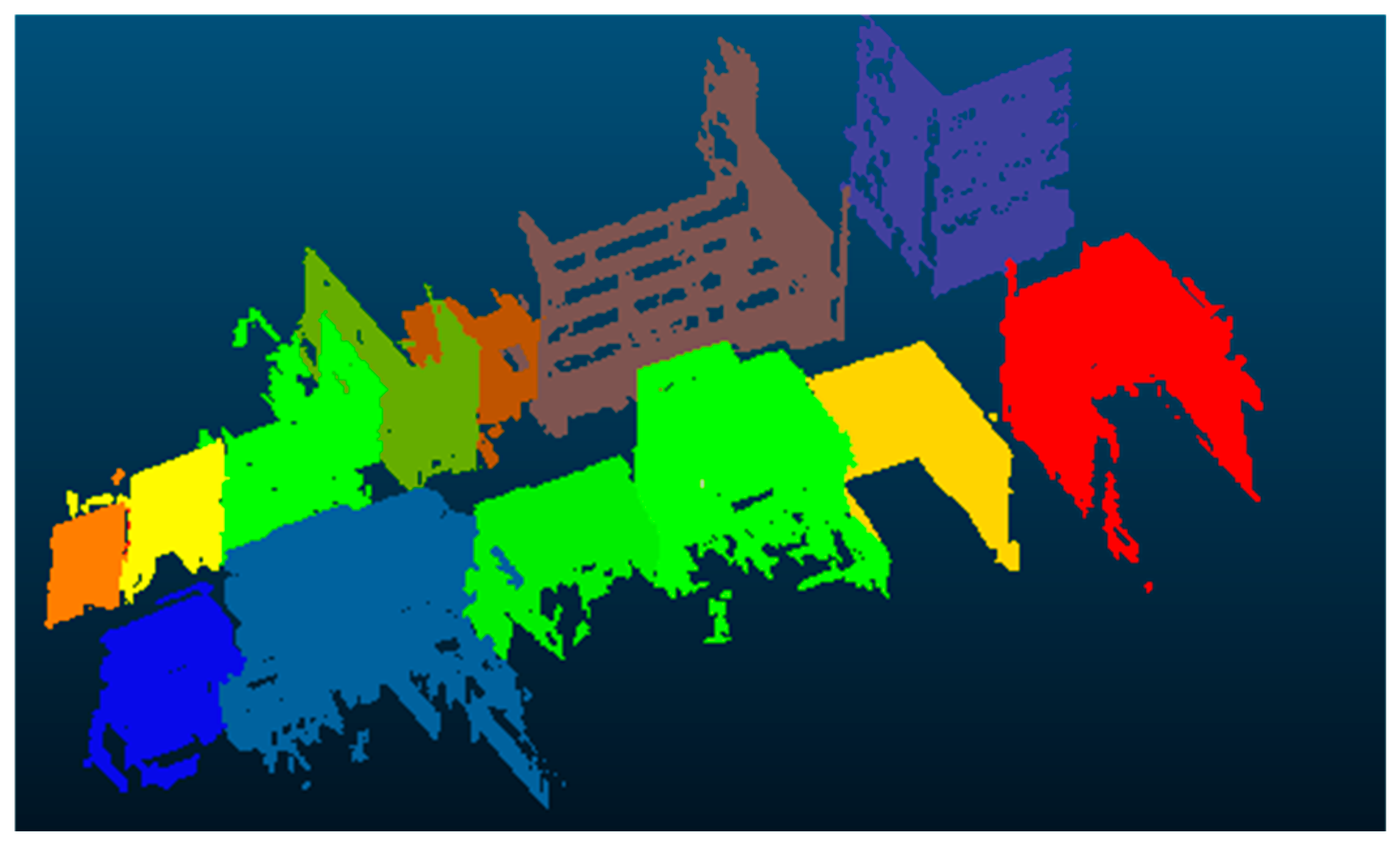
3.3. Bulk Imaging of Multiple Buildings in a Shopping District
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Applied Technology Council. Procedures for Post-Earthquake Safety Evaluation of Buildings & Addendum; Applied Technology Council: Redwood, CA, USA, 1989. [Google Scholar]
- Cal OES. Post Disaster Safety Assessment Program (SAP) Evaluator Student Manual, 18th ed.; Cal OES: CA, USA, 2023. [Google Scholar]
- Building Performance, Rapid Building Assessment System. Available online: https://www.building.govt.nz/managing-buildings/managing-buildings-in-an-emergency/rapid-building-assessment-system (accessed on 20 March 2025).
- Manual for the Compilation of the 1st Level Form for Damage Detection, Emergency Intervention and Usability for Ordinary Buildings in the Post-Seismic Emergency. Available online: https://web.archive.org/web/20090828100822/http://gndt.ingv.it/Pubblicazioni/Bernardini/Man_Aedes/Manuale/ManualeIndice.html (accessed on 20 March 2025).
- Hīkina, W. Rapid Post-Disaster Field Guide: Building Usability Assessment; Ministry of Business, Innovation and Employment: Wellington, New Zealand, 2014; p. 74. [Google Scholar]
- Department of Civil Protection, Civile. Manual for the Compilation of the First Level Form for Damage Detection, Emergency Response and Usability for Ordinary Buildings in Post-Seismic Emergencies (AeDES); Department of Civil Protection: Rome, Italy, 2014; pp. 28–48. [Google Scholar]
- Cabinet Office. Guidelines for the Implementation System of Housing Damage Certification Operations Related to Disasters. Available online: https://www.bousai.go.jp/taisaku/pdf/saigai_tebiki_full.pdf (accessed on 20 December 2024).
- Japan Building Disaster Prevention Association, National Council for Post-Disaster Building Safety Evaluation. Available online: https://www.kenchiku-bosai.or.jp/assoc/oq-index/ (accessed on 26 May 2024).
- Ministry of Internal Affairs and Communications. Statistics Dashboard. Available online: https://dashboard.e-stat.go.jp/dataSearch (accessed on 26 May 2024).
- Ministry of Land, Infrastructure, Transport and Tourism. Building Construction Starts Statistics Report (FY 2022): Number of Buildings, Total Floor Area, and Estimated Construction Costs by Structure and Use. Available online: https://www.e-stat.go.jp/stat-search/files?stat_infid=000040247003 (accessed on 25 April 2025).
- Post-Earthquake Building Safety Evaluation Criteria and Emergency Safety Assessment Manual for Wooden Buildings, 1st ed.; General Incorporated Association Japan Architectural Disaster Prevention Association National Disaster-Damaged Buildings Emergency Risk Assessment Council: Tokyo, Japan, 1998; pp. 24–25.
- Kono, T.; Yamada, K.; Honma, S. A Method for Post-earthquake Rapid Safety Assessment of Buildings Based on Image Analysis. In Research Reports of the Chugoku Branch of the Architectural Institute of Japan; Architectural Institute of Japan: Tokyo, Japan, 2022; Volume 45, pp. 219–222. [Google Scholar]
- Chida, H.; Takahashi, N.; Yamada, T. Application of a Deep Learning-Based Image Diagnosis System for Damage Investigation of the 2021 Fukushima Offshore Earthquake and Fundamental Study for Practical Use; The Architectural Institute of Japan, Series B: Tokyo, Japan, 2022; Volume 68, pp. 1–8. [Google Scholar]
- Okada, T.; Miyazu, Y. Seismic Damage Assessment of Wooden Houses Using CNN with Response Acceleration Records; Information (Computing) Symposium, The Architectural Institute of Japan: Tokyo, Japan, 2021; Volume 44, pp. 335–338. [Google Scholar]
- Kuniyoshi, I.; Sato, S.; Nagaike, I.; Bao, U. Building Damage Visualization Through Three-Dimensional Reconstruction. IEEE Access 2025, 13, 68410–68421. [Google Scholar] [CrossRef]
- Japan Sash Association. Standard Specifications and Dimensional Standards for Residential Sashes and Entrance Products 504. Available online: https://www.jsma.or.jp/Portals/0/images/useful/houreikijun/kikakusunpo(20210426).pdf (accessed on 20 September 2024).
- JIS A 4706:2021; Windows. Japanese Standards Association: Tokyo, Japan, 2021; p. 7.
- Li, L.; Yang, F.; Zhu, H. An Improved RANSAC for 3D Point Cloud Plane Segmentation Based on Normal Distribution Transformation Cells. Remote Sens. 2017, 9, 433. [Google Scholar] [CrossRef]
- Kuniyoshi, I.; Nagaike, I.; Sato, S.; Bao, Y. Building Damage Visualization Through Three-Dimensional Reconstruction and Window Detection. Sensors 2025, 25, 2979. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Camera Name | Matterport Pro2 (P2) | Matterport Pro3 (P3) | LixelKity K1 (K1) |
|---|---|---|---|
| Camera body |  |  |  |
| Point Cloud Acquisition Method | Infrared | LiDAR | LiDAR |
| Point Cloud Density | Uniform | Uniform | Depends on Information Density |
| Effective Range | 100 m | 100 m | 40 m |
| Others | Using Tripod Approx. 30 sec/scan | Using Tripod Approx. 20 sec/scan | Handheld Scanner |
| Measuring Point | Current Method (°) | Proposed Method (°) | Reference Value (°) | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1st | 2nd | 3rd | 4th | 5th | 6th | 7th | 8th | 9th | 10th | Average | Standard Deviation | P2 | P3 | K1 | ||
| 1 | −0.05 | −0.07 | −0.02 | −0.10 | −0.02 | −0.10 | 0.00 | −0.05 | 0.00 | −0.07 | −0.05 | 0.03 | −0.08 | −0.04 | 0.12 | −0.05 |
| 2 | 0.14 | 0.38 | 0.22 | 0.24 | 0.22 | 0.26 | 0.17 | 0.12 | 0.19 | 0.19 | 0.21 | 0.07 | 0.28 | 0.28 | −0.10 | 0.25 |
| 3 | 0.10 | 0.14 | 0.17 | 0.12 | 0.17 | 0.14 | 0.19 | 0.10 | 0.17 | 0.12 | 0.14 | 0.03 | 0.21 | 0.26 | 0.31 | 0.15 |
| 4 | −0.05 | 0.00 | −0.02 | −0.07 | 0.02 | −0.02 | 0.02 | −0.10 | 0.05 | 0.05 | −0.01 | 0.05 | 0.03 | 0.00 | −0.12 | 0.05 |
| 5 | −0.05 | 0.07 | 0.17 | −0.02 | 0.02 | 0.02 | 0.02 | −0.05 | 0.12 | −0.05 | 0.03 | 0.07 | 0.08 | 0.16 | 0.20 | 0.1 |
| 6 | −0.10 | −0.10 | 0.00 | −0.12 | −0.07 | −0.17 | −0.12 | −0.12 | −0.17 | −0.10 | −0.10 | 0.05 | −0.18 | −0.12 | −0.11 | −0.15 |
| 7 | −0.12 | −0.19 | −0.12 | −0.14 | −0.17 | −0.17 | −0.05 | −0.22 | −0.17 | −0.19 | −0.15 | 0.05 | −0.05 | −0.12 | −0.19 | −0.1 |
| 8 | −0.07 | −0.02 | −0.05 | −0.05 | −0.02 | −0.12 | −0.07 | −0.02 | −0.07 | −0.10 | −0.06 | 0.03 | −0.08 | −0.09 | −0.38 | −0.1 |
| Measuring Point | Current Method (°) | Proposed Method (°) | Reference Value (°) | |||||
|---|---|---|---|---|---|---|---|---|
| 1st | 2nd | Average | Standard Deviation | P2 | P3 | K1 | ||
| 1 | 0.34 | 0.19 | 0.26 | 0.08 | 0.18 | 0.07 | 0.25 | 0.15 |
| 2 | 0.04 | 0.24 | 0.14 | 0.10 | 0.09 | −0.06 | 0.21 | 0 |
| 3 | 0.11 | 0.29 | 0.20 | 0.09 | 0.05 | 0.04 | 0.20 | 0.05 |
| 4 | 0.18 | 0.15 | 0.16 | 0.01 | 0.05 | 0.16 | 0.40 | 0.1 |
| 5 | 0.34 | 0.11 | 0.22 | 0.12 | 0.26 | 0.19 | 0.34 | 0.15 |
| 6 | 0.16 | 0.13 | 0.15 | 0.01 | 0.01 | 0.04 | 0.30 | 0.05 |
| Measuring Point | Current Method (°) | Proposed Method (°) | Reference Value (°) | ||
|---|---|---|---|---|---|
| 1st | P2 | P3 | K1 | ||
| 1 | 0.095 | 0.003 | 0.005 | 0.051 | 0.0 |
| 2 | 0.124 | −0.037 | 0.0324 | 0.0653 | 0.05 |
| 3 | 0 | 0.099 | 0.0952 | 0.234 | 0.1 |
| 4 | 0.048 | 0.027 | 0.0084 | 0.0145 | 0.05 |
| 5 | 0.095 | 0.0948 | 0.0897 | 0.561 | 0.1 |
| 6 | 0.072 | 0.043 | 0.021 | 0.629 | 0.05 |
| 7 | 0.124 | 0.093 | 0.156 | 0.153 | 0.0 |
| 8 | 0.095 | 0.017 | 0.0098 | 0.365 | 0.0 |
| Measuring Point | Current Method (°) | Proposed Method (°) | Reference Value (°) | |||
|---|---|---|---|---|---|---|
| 1st | 2nd | Average | Standard Deviation | P3 | ||
| 1 | 22120.19 | 0.10 | −0.05 | 0.14 | −0.06 | −0.2 |
| 2 | −0.33 | 0.10 | −0.12 | 0.21 | −0.02 | −0.1 |
| 3 | −0.62 | −0.19 | −0.41 | 0.21 | −0.26 | −0.2 |
| 4 | 0.43 | 0.19 | 0.31 | 0.12 | −0.45 | 0.3 |
| 5 | −0.14 | −0.24 | −0.19 | 0.05 | −0.36 | −0.3 |
| 6 | −0.05 | −0.29 | −0.17 | 0.12 | −0.11 | −0.2 |
| 7 | −0.33 | −0.24 | −0.29 | 0.05 | −0.05 | −0.3 |
| 8 | 0.33 | 0.43 | 0.38 | 0.05 | 0.09 | 0.1 |
| 9 | −0.38 | −0.05 | −0.21 | 0.17 | −0.16 | 0 |
| 10 | 0.10 | 0.24 | 0.17 | 0.07 | 0.36 | −0.1 |
| 11 | 0.05 | −0.53 | −0.24 | 0.29 | −0.33 | −0.2 |
| 12 | 0.24 | −0.53 | −0.14 | 0.38 | −0.23 | −0.3 |
| 13 | −0.05 | −0.24 | −0.14 | 0.10 | 0.06 | −0.1 |
| 14 | 0.38 | 0.05 | 0.21 | 0.17 | 0.23 | 0.3 |
| 15 | −0.29 | - | −0.29 | 0.00 | −0.24 | 0.1 |
| 16 | 0.19 | 0.10 | 0.14 | 0.05 | 0.03 | 0.1 |
| 17 | −0.43 | −0.29 | −0.36 | 0.07 | −0.26 | −0.2 |
| 18 | 0.24 | 0.19 | 0.21 | 0.02 | 0.10 | −0.1 |
| Measuring Point | Current Method (°) | Proposed Method (°) | Reference Value (°) | |||
|---|---|---|---|---|---|---|
| 1st | 2nd | Average | Standard Deviation | P3 | ||
| 1 | −0.43 | 0.00 | −0.21 | 0.21 | - | −0.3 |
| 2 | −0.57 | 0.00 | −0.29 | 0.29 | −0.29 | −0.2 |
| 3 | −0.14 | 0.24 | 0.05 | 0.19 | 0.10 | 0.1 |
| 4 | −0.29 | 0.05 | −0.12 | 0.17 | −0.12 | 0.1 |
| 5 | 0.19 | −0.19 | 0.00 | 0.19 | 0.11 | 0.1 |
| 6 | 0.10 | 0.38 | 0.24 | 0.14 | −0.16 | −0.1 |
| 7 | 0.10 | 0.00 | 0.05 | 0.05 | −0.01 | 0.2 |
| 8 | −0.24 | −0.24 | −0.24 | 0.00 | 0.09 | 0.1 |
| 9 | 0.05 | 0.38 | 0.21 | 0.17 | 0.258 | 0.2 |
| 10 | −0.29 | −0.33 | −0.31 | 0.02 | - | 0.2 |
| Measuring Point | Current Method (°) | Proposed Method (°) | Reference Value (°) | ||||
|---|---|---|---|---|---|---|---|
| 1st | 2nd | 3rd | Average | Standard Deviation | P3 | ||
| 1 | −0.43 | −0.62 | −1.00 | −0.68 | 0.24 | −0.88 | −0.80 |
| 2 | −0.53 | −0.57 | −0.14 | −0.41 | 0.19 | −0.77 | −0.60 |
| 3 | −0.43 | 0.24 | 0.05 | −0.05 | 0.28 | 0.40 | −0.20 |
| 4 | 0.00 | 0.72 | 1.00 | 0.57 | 0.42 | 0.49 | 0.30 |
| 5 | 1.29 | 2.05 | 1.91 | 1.75 | 0.33 | 1.47 | 1.50 |
| 6 | 0.14 | 1.10 | 0.33 | 0.53 | 0.41 | 0.77 | 0.70 |
| 7 | 0.05 | 0.10 | 0.33 | 0.16 | 0.13 | 0.20 | 0.10 |
| 8 | - | - | - | - | - | - | −0.70 |
| 780 × 970 mm | 1690 × 1830 mm | |||||
|---|---|---|---|---|---|---|
| Specified Tilt (°) | 0° | 1/60 rad = 0.95° | 1/20 rad = 2.85° | 0° | 1/60 rad = 0.95° | 1/20 rad = 2.85° |
| First (Left) (°) | 0.00 | 0.950 | 2.95 | 0.03 | 0.942 | 2.89 |
| First (Right) (°) | 0.05 | 0.948 | 2.97 | 0.08 | 0.944 | 2.80 |
| Second (Left) (°) | 0.03 | 0.959 | 2.80 | 0.01 | 0.970 | 2.79 |
| Second (Right) (°) | 0.05 | 0.971 | 2.78 | 0.02 | 0.965 | 2.78 |
| Depth Inclination (°) | 0.05 | 0.07 | 0.09 | 0.01 | 0.09 | 0.07 |
| Average Error Rate (%) | 0.442 | 0.957 | 2.875 | 0.34 | 0.955 | 2.815 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nagaike, I.; Kuniyoshi, I.; Sato, S.; Bao, Y. Rapid Seismic Damage Assessment in Densely Built Wooden Residential Areas Using 3D Point Cloud Measurement. Buildings 2025, 15, 1623. https://doi.org/10.3390/buildings15101623
Nagaike I, Kuniyoshi I, Sato S, Bao Y. Rapid Seismic Damage Assessment in Densely Built Wooden Residential Areas Using 3D Point Cloud Measurement. Buildings. 2025; 15(10):1623. https://doi.org/10.3390/buildings15101623
Chicago/Turabian StyleNagaike, Itsuki, Ittetsu Kuniyoshi, Sachie Sato, and Yue Bao. 2025. "Rapid Seismic Damage Assessment in Densely Built Wooden Residential Areas Using 3D Point Cloud Measurement" Buildings 15, no. 10: 1623. https://doi.org/10.3390/buildings15101623
APA StyleNagaike, I., Kuniyoshi, I., Sato, S., & Bao, Y. (2025). Rapid Seismic Damage Assessment in Densely Built Wooden Residential Areas Using 3D Point Cloud Measurement. Buildings, 15(10), 1623. https://doi.org/10.3390/buildings15101623