
Axial and Shear Behavior of Prestressed Damping Isolation Units Using a Spring and Rubbers



Abstract
:1. Introduction
2. Research Significance
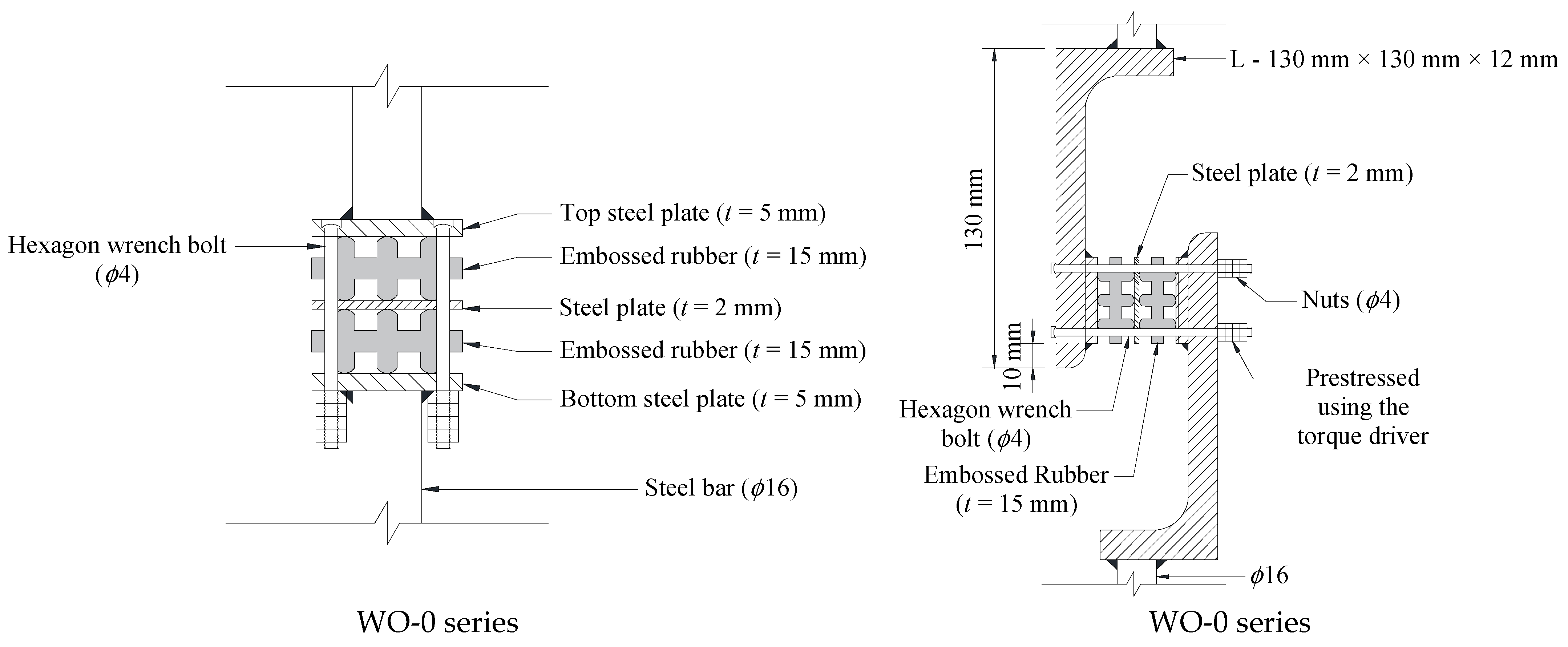
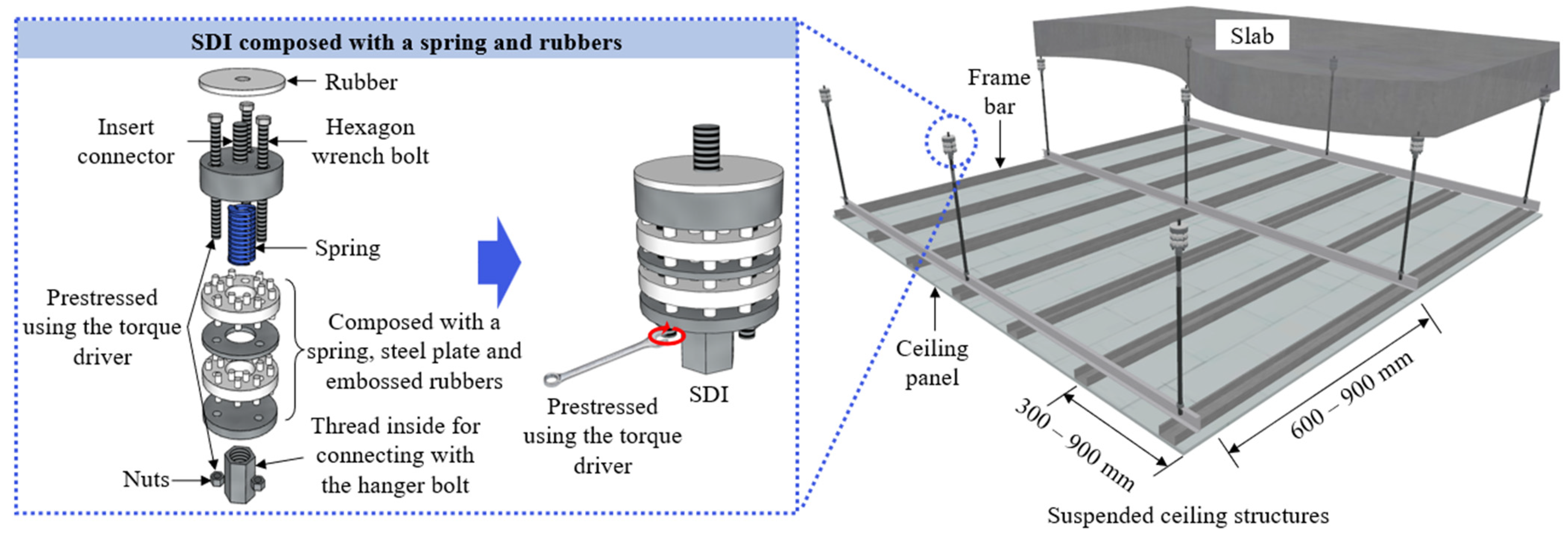
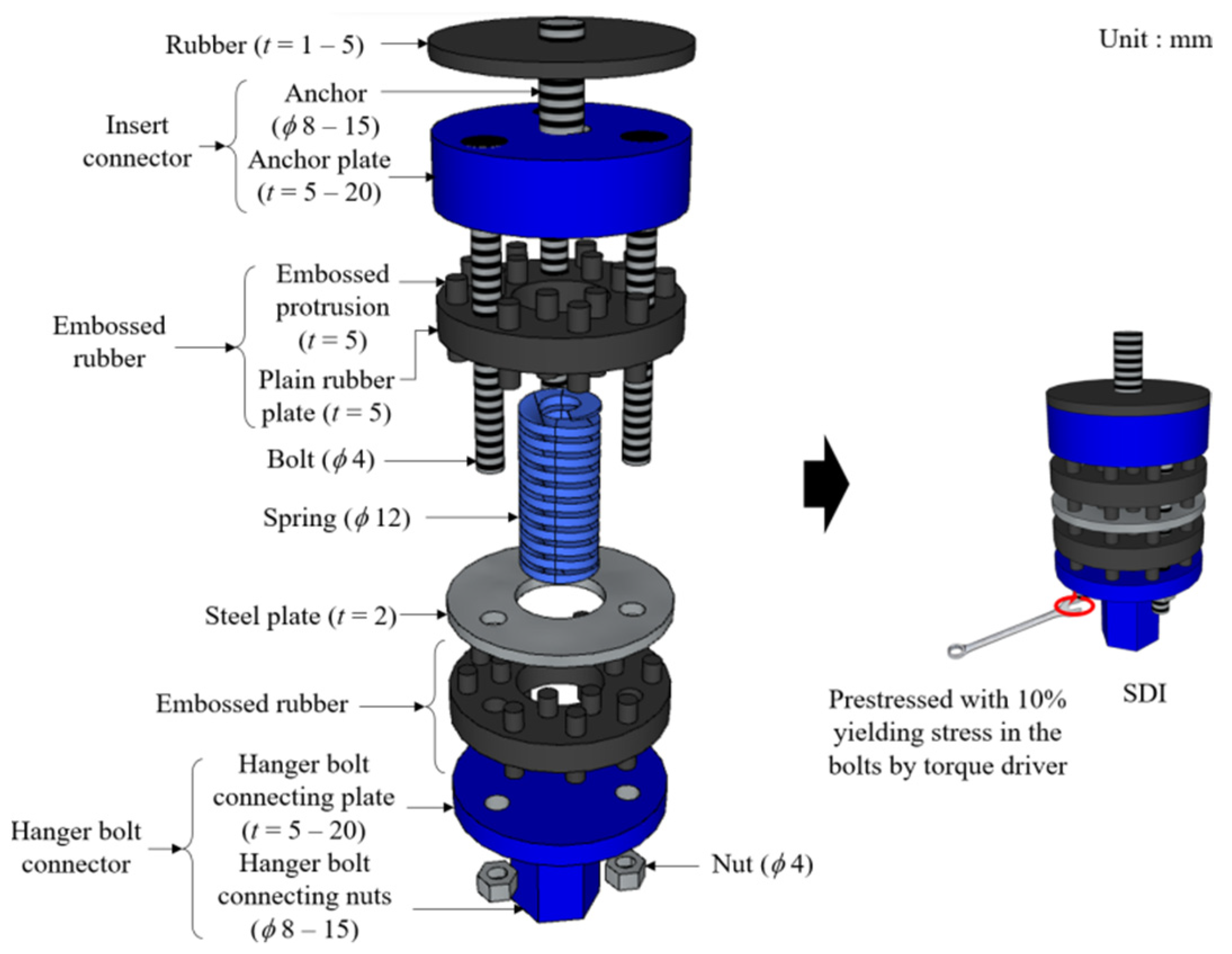
3. Details of Damping−Isolation Unit
4. Experimental Investigation
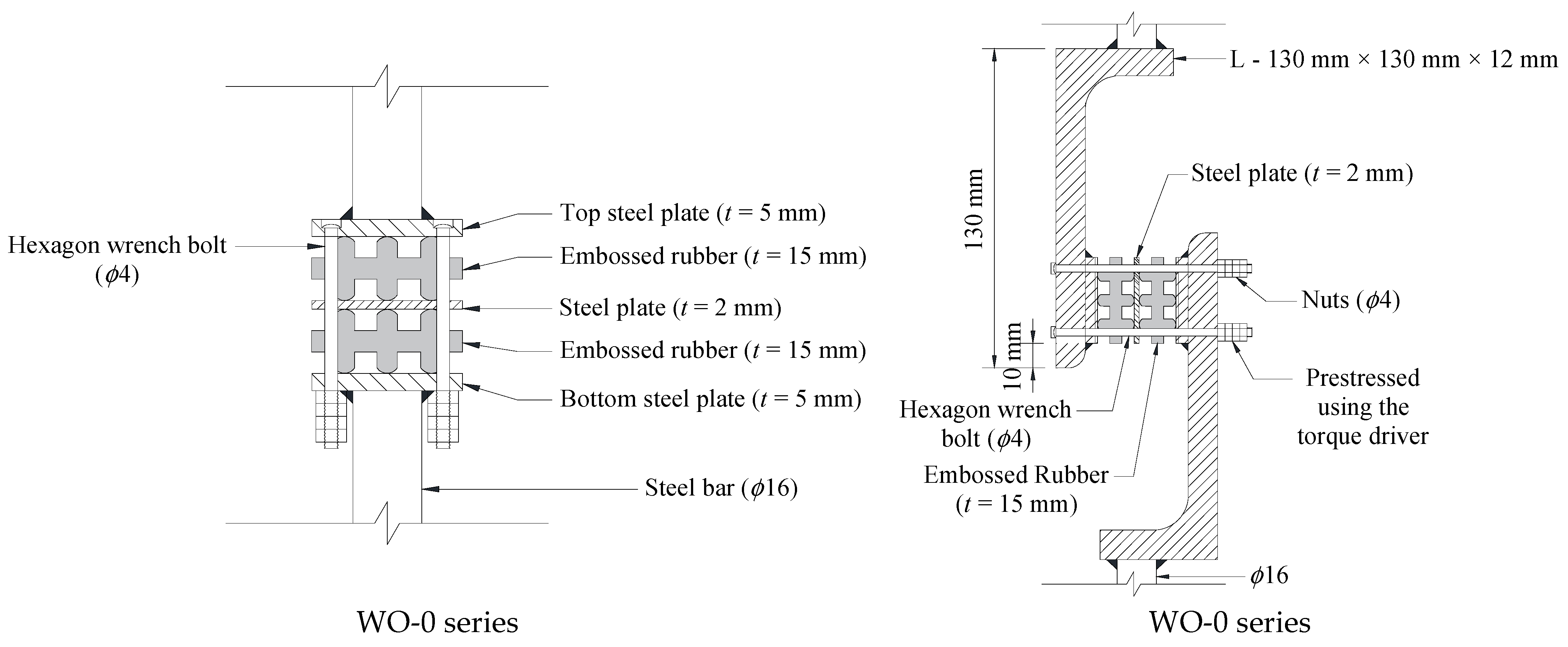
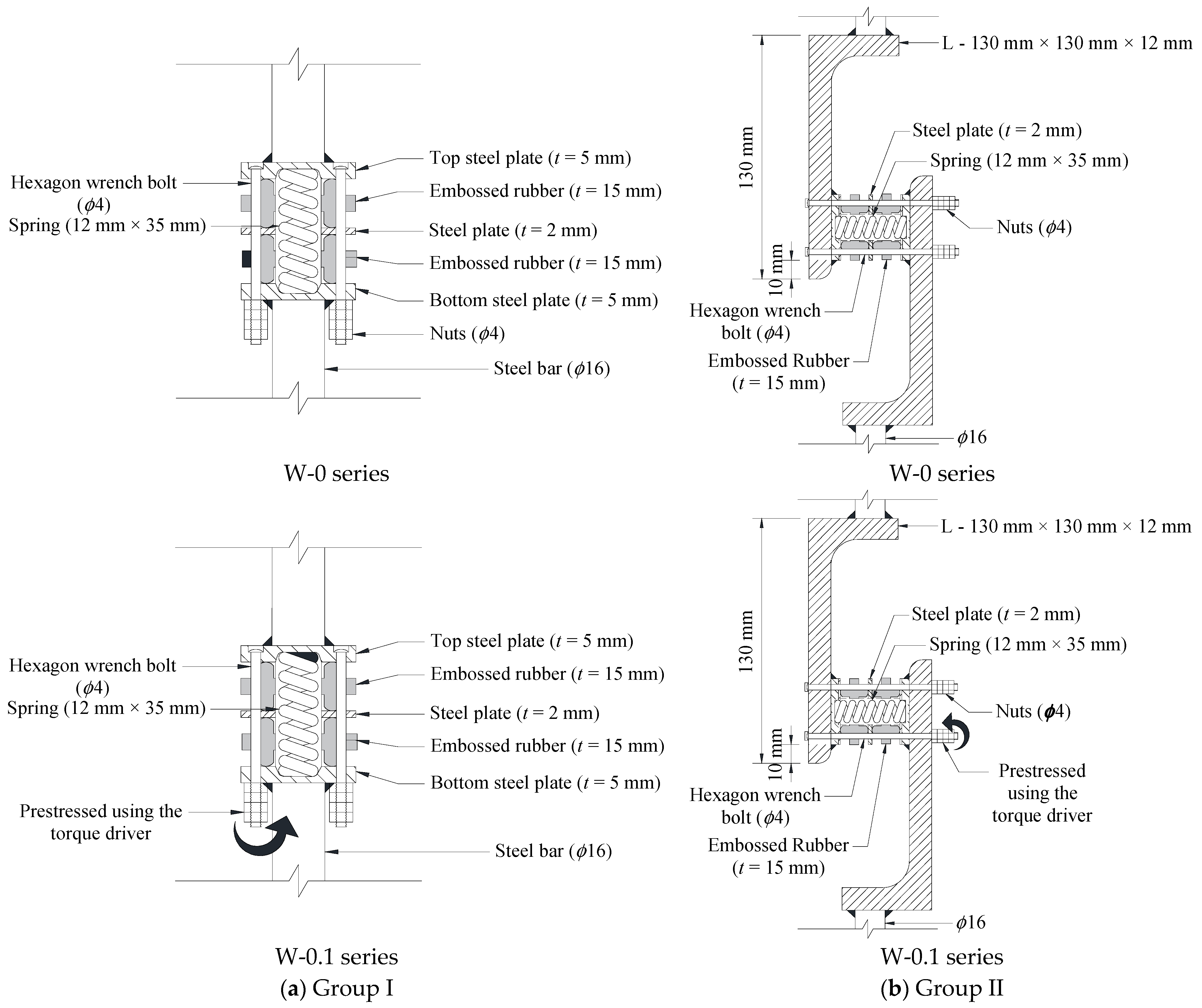
4.1. Test Specimens
4.2. Material Properties
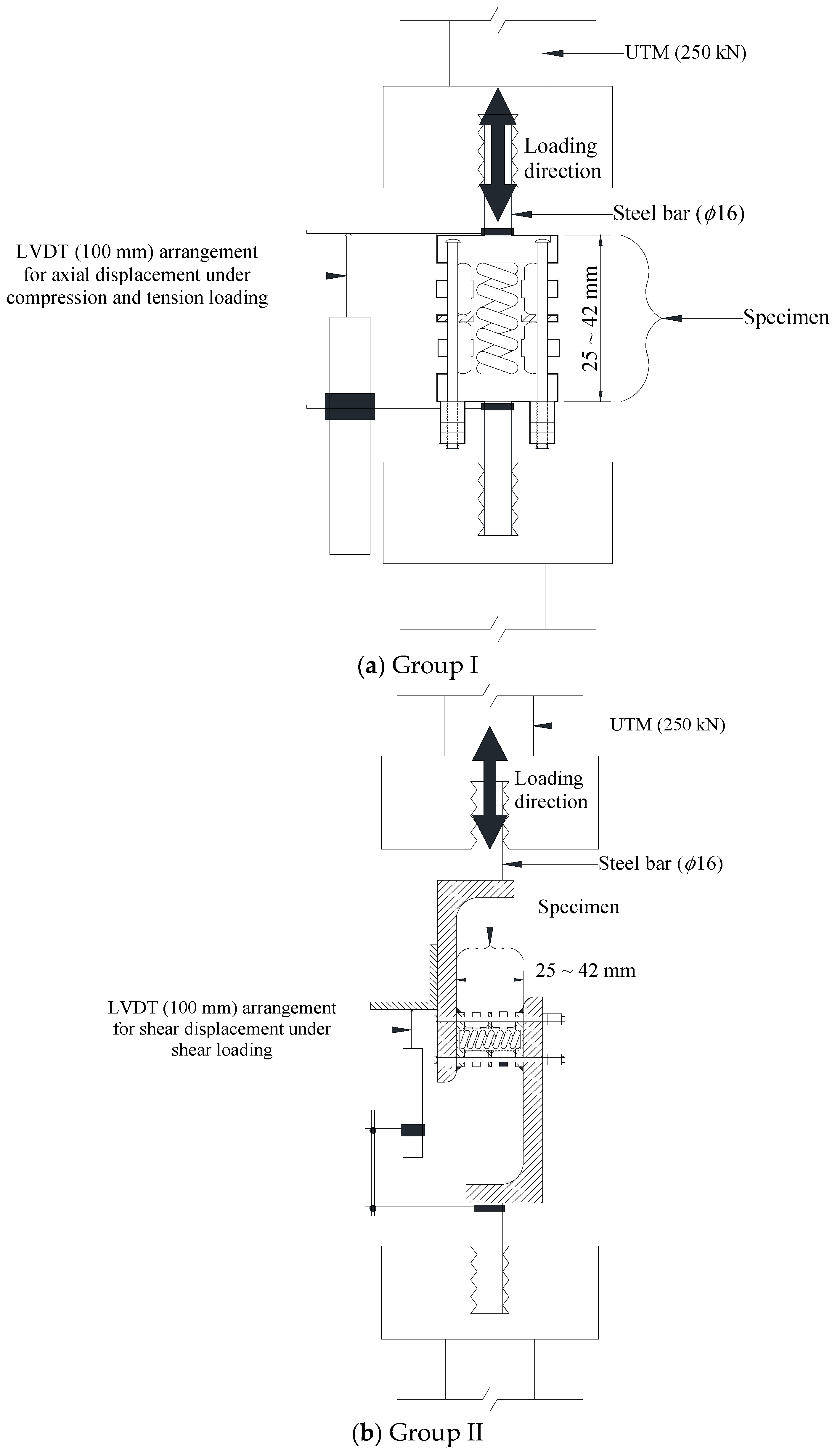
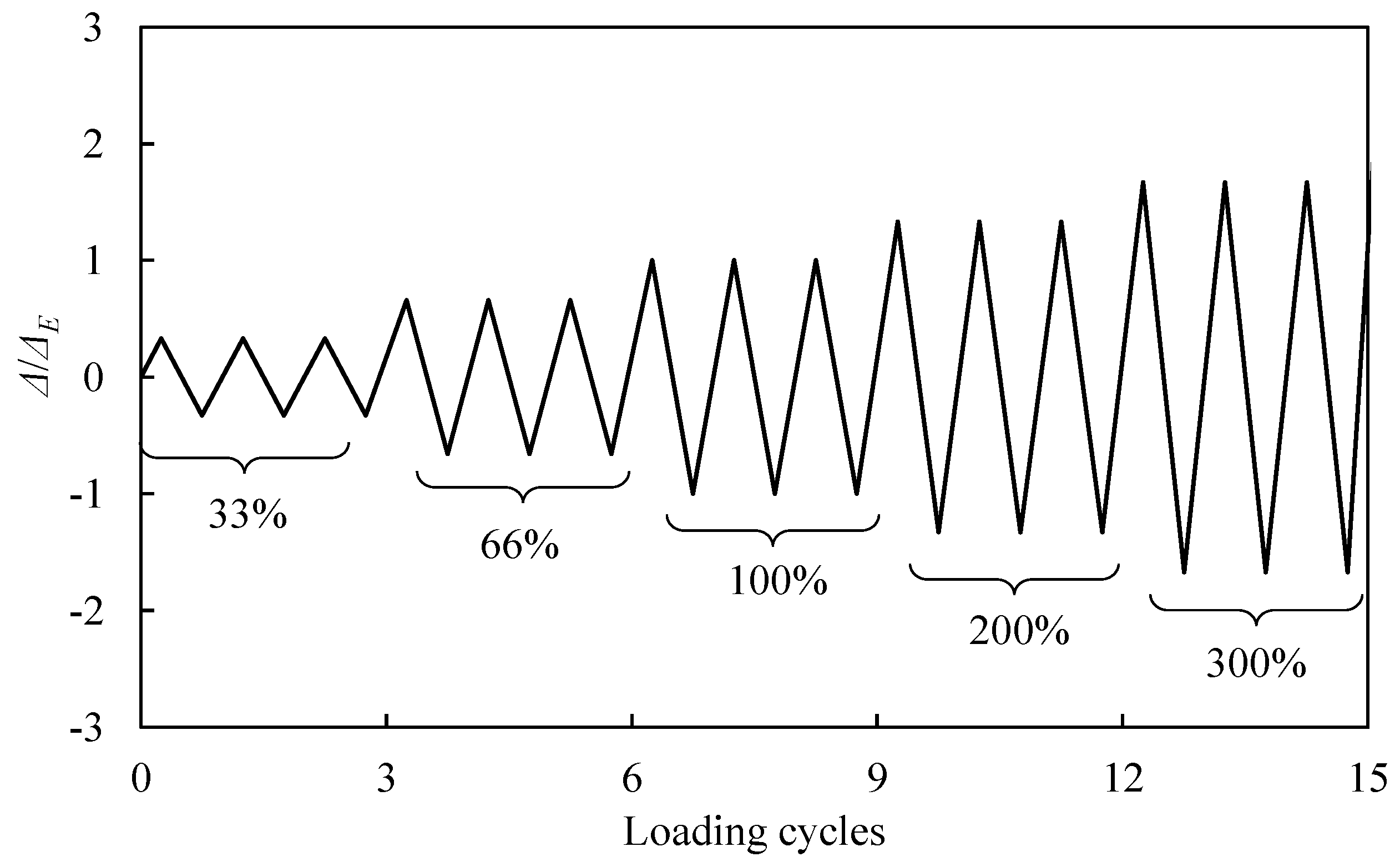
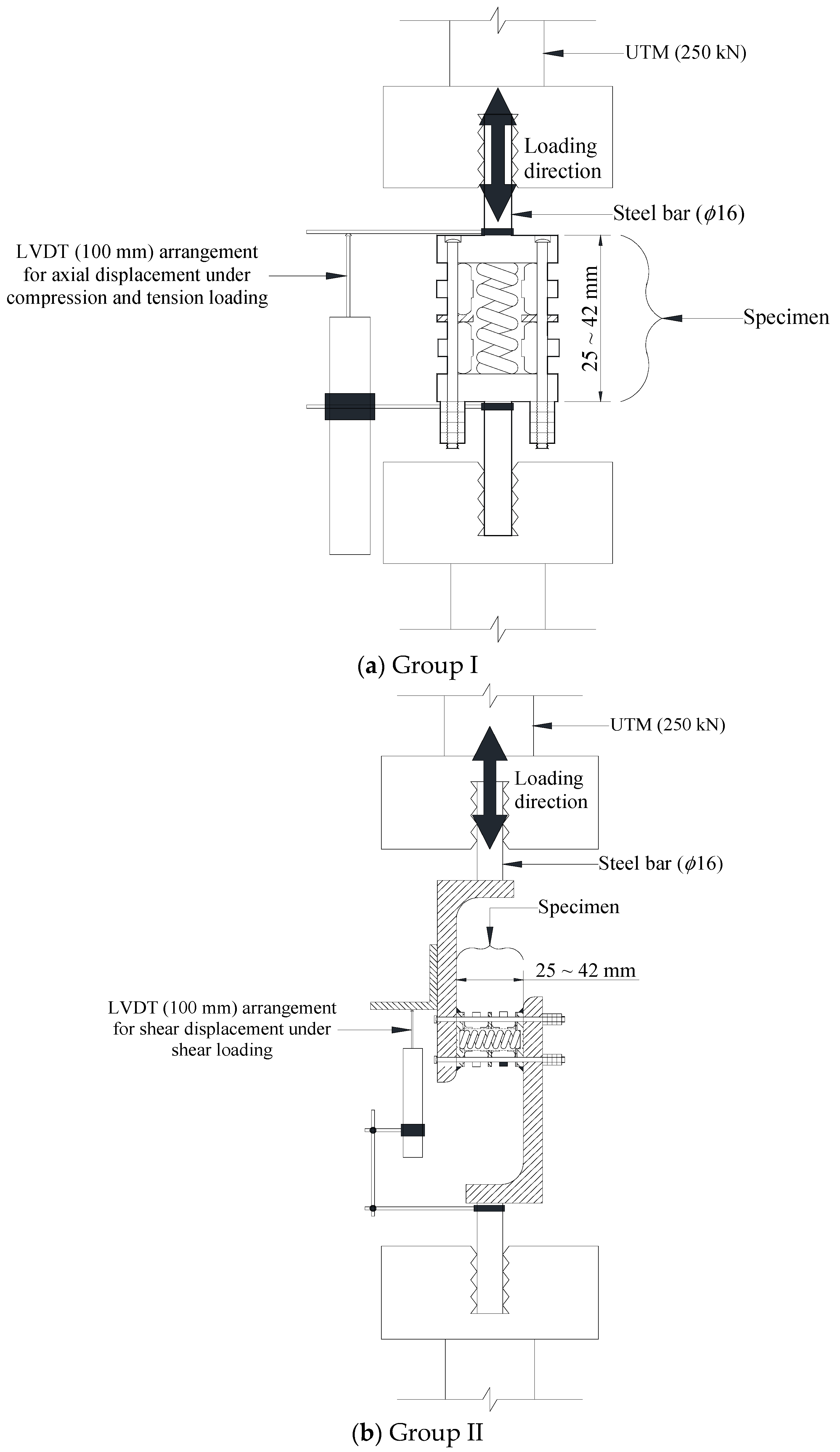
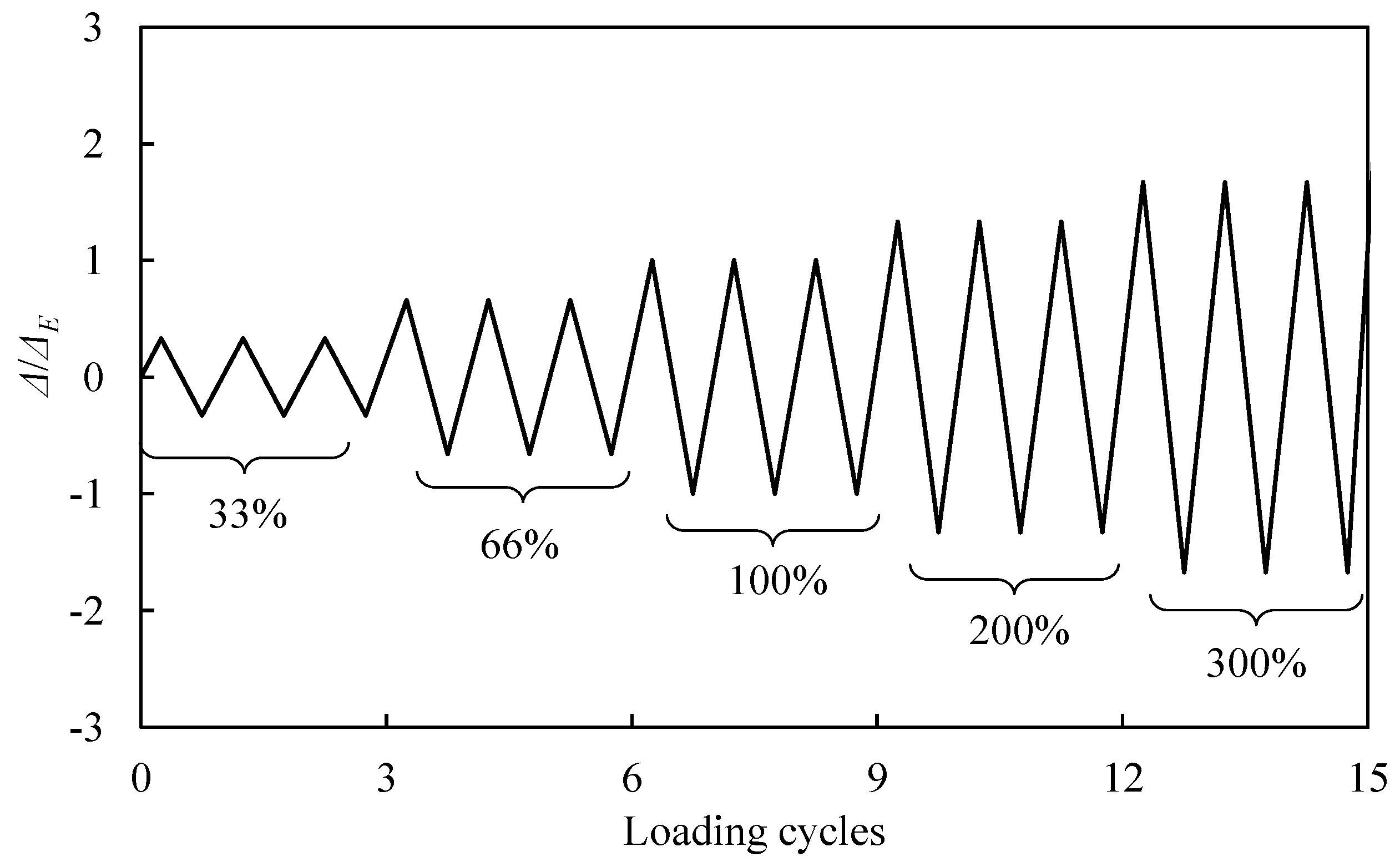
4.3. Test Set-Up
5. Test Results and Discussion
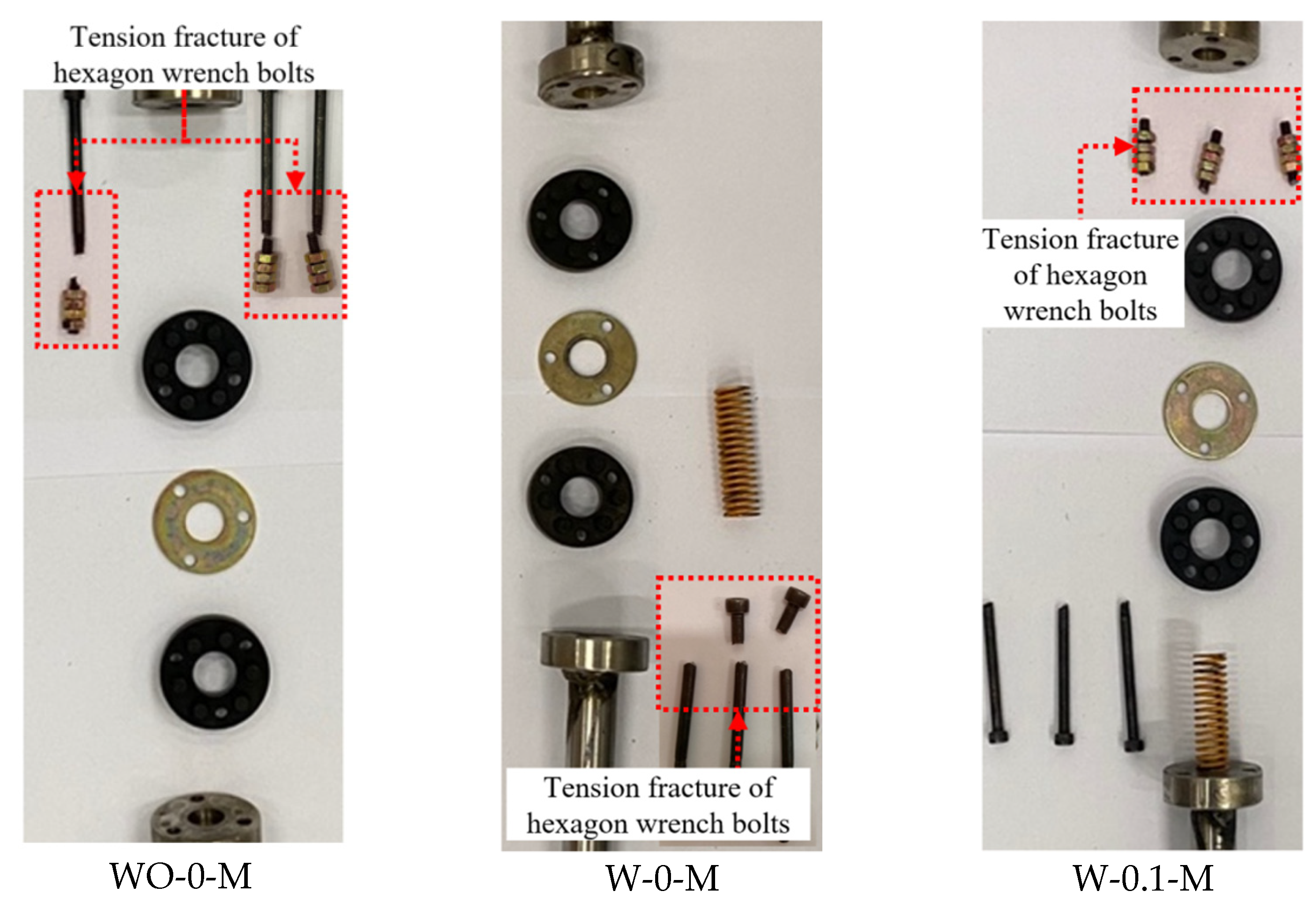
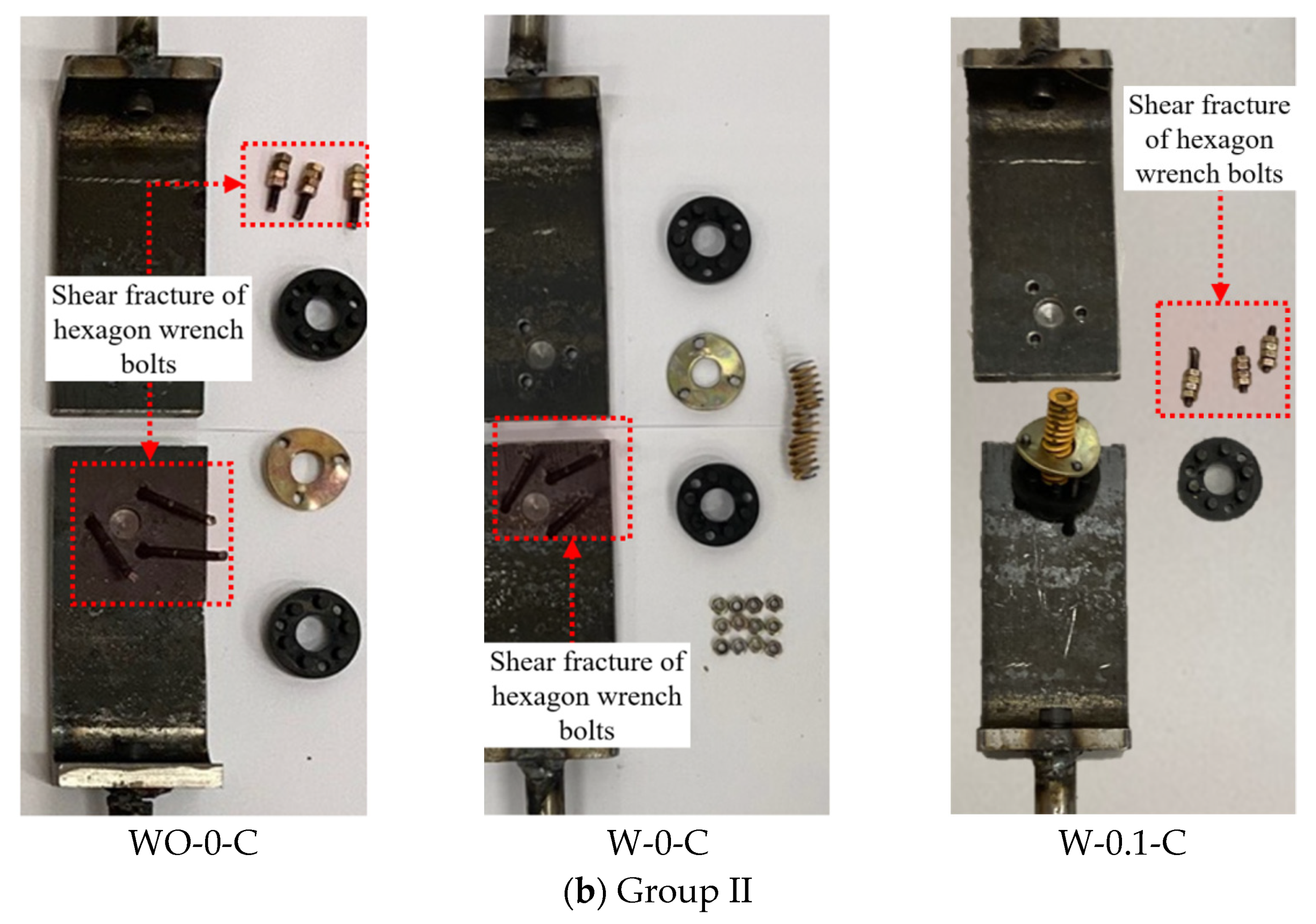
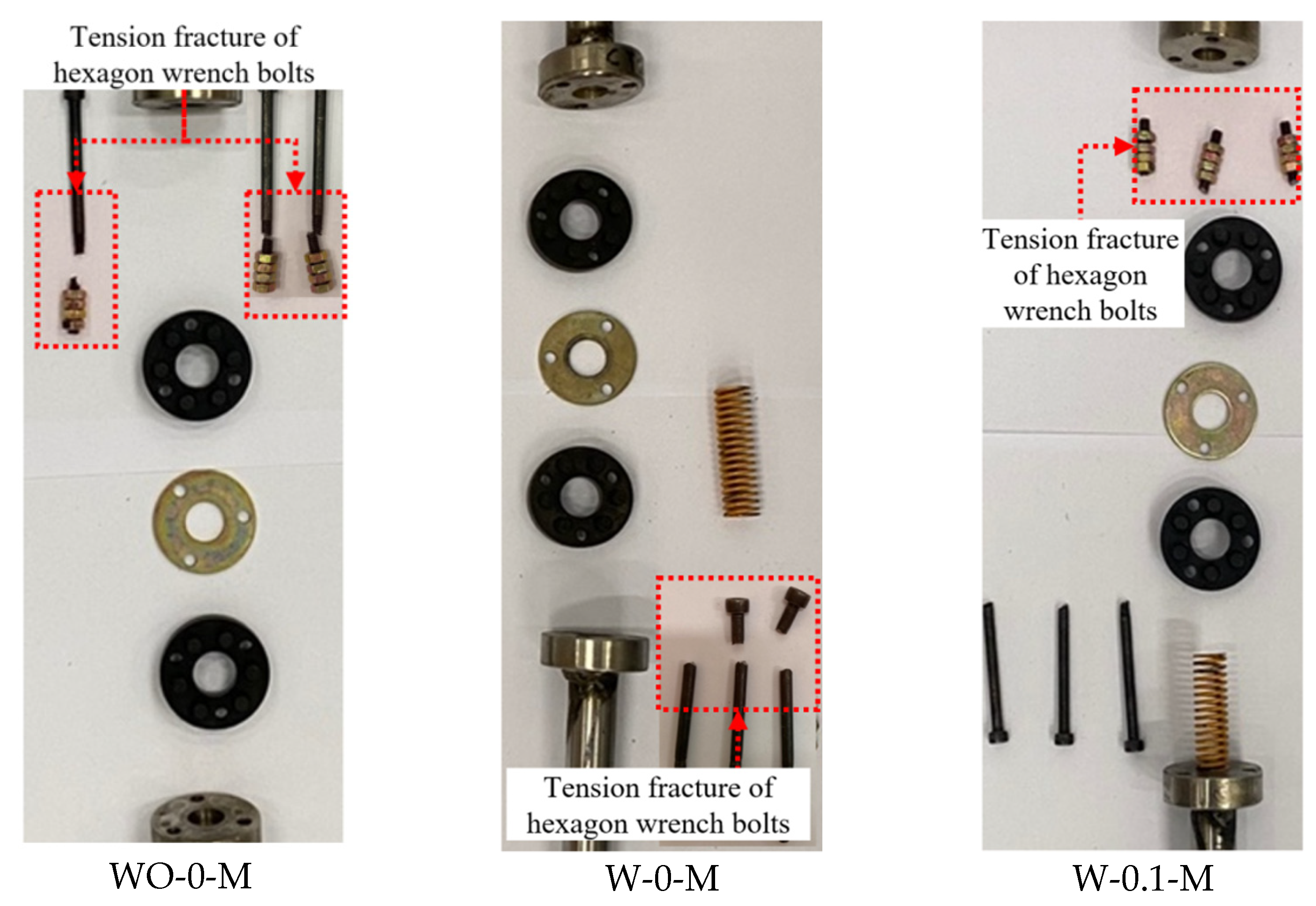
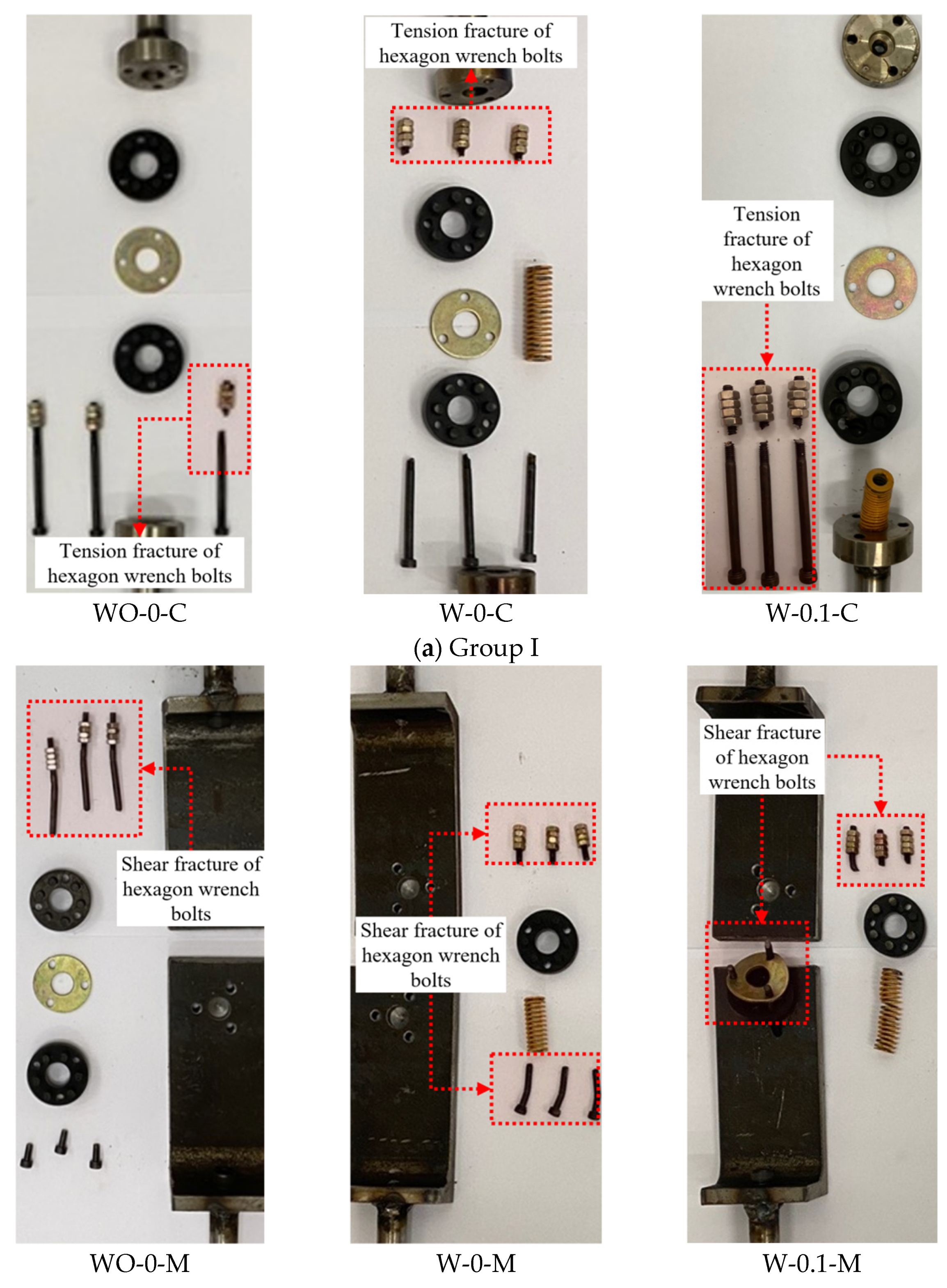
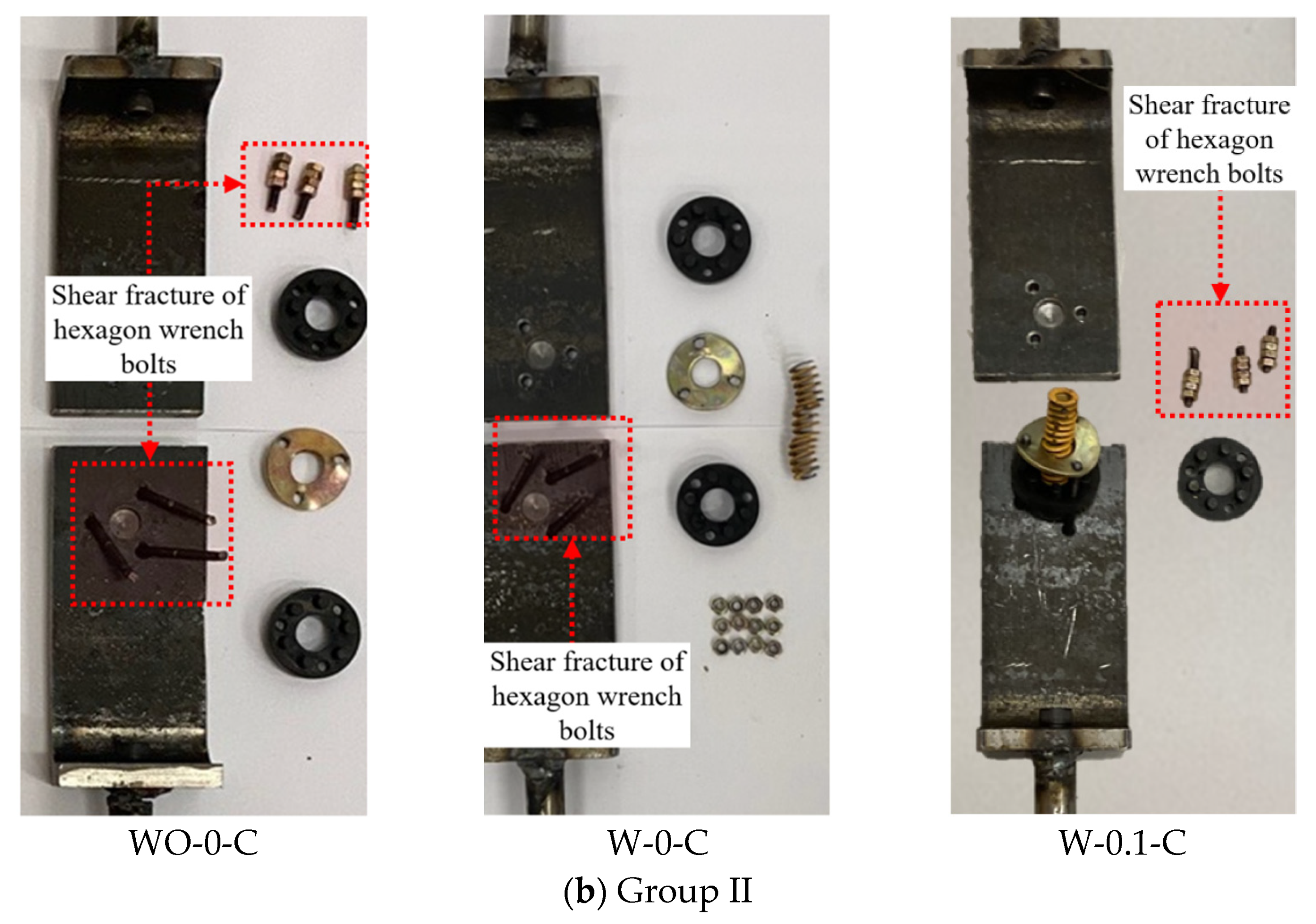
5.1. Failure Mode
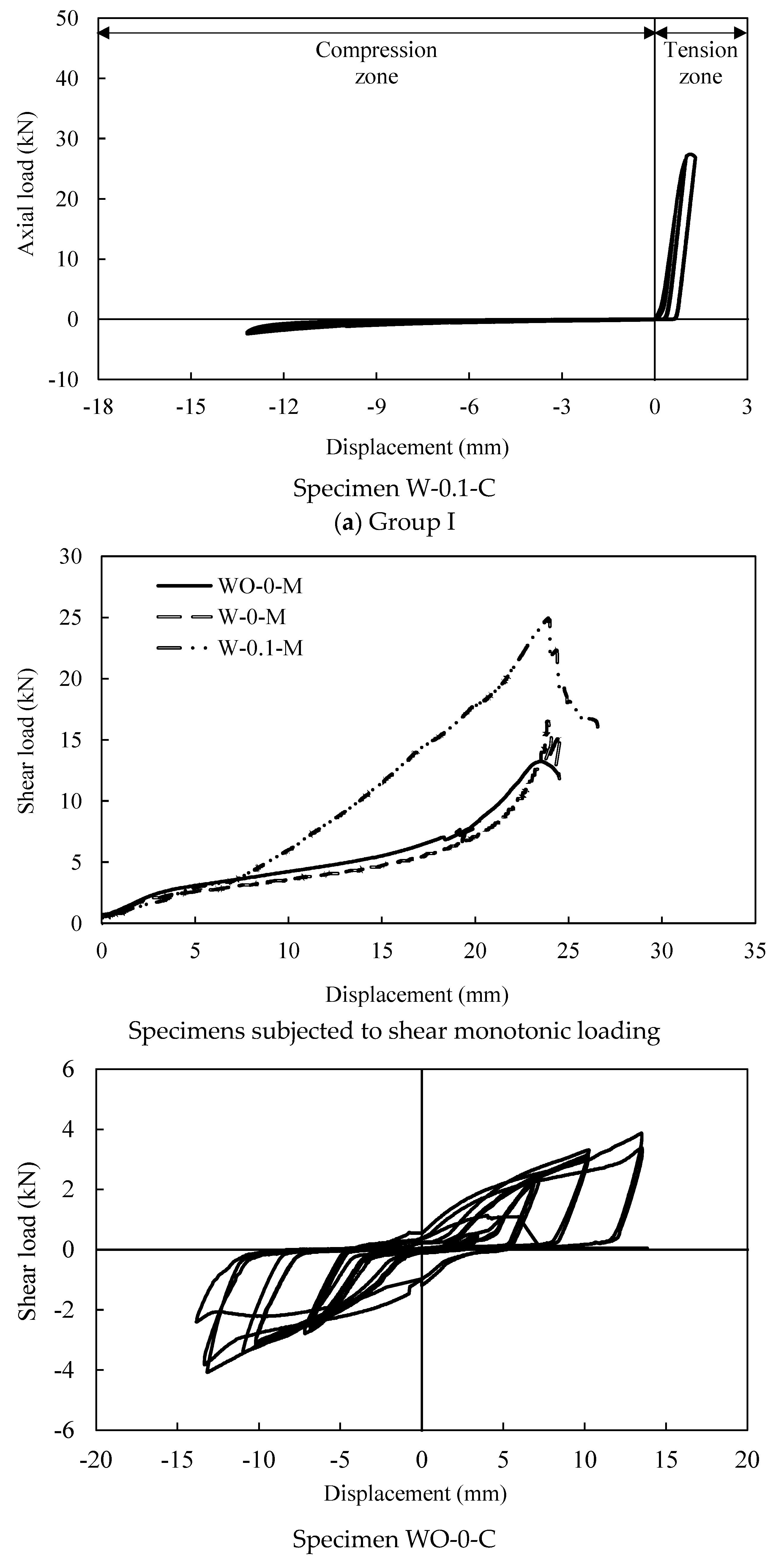
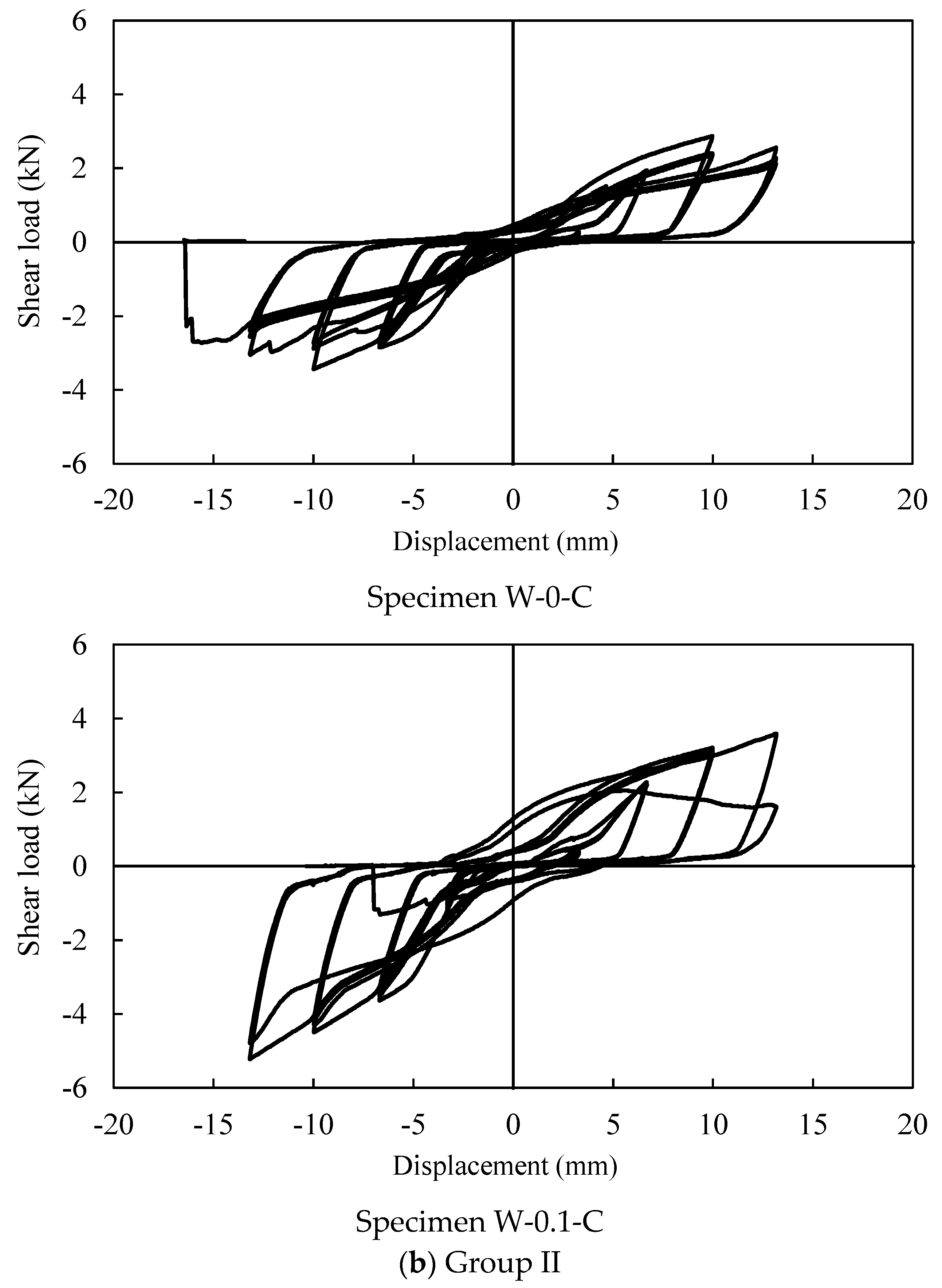
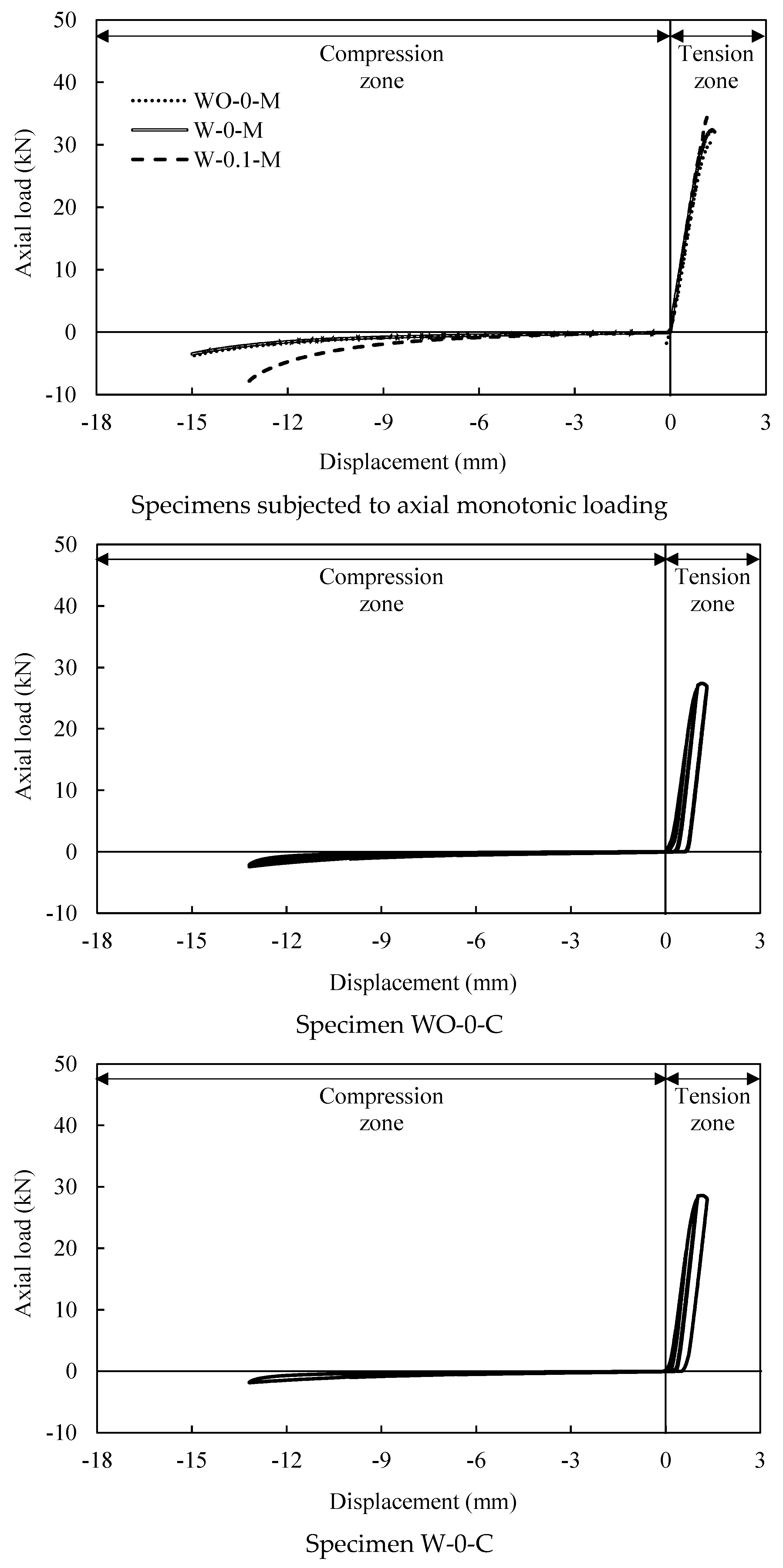
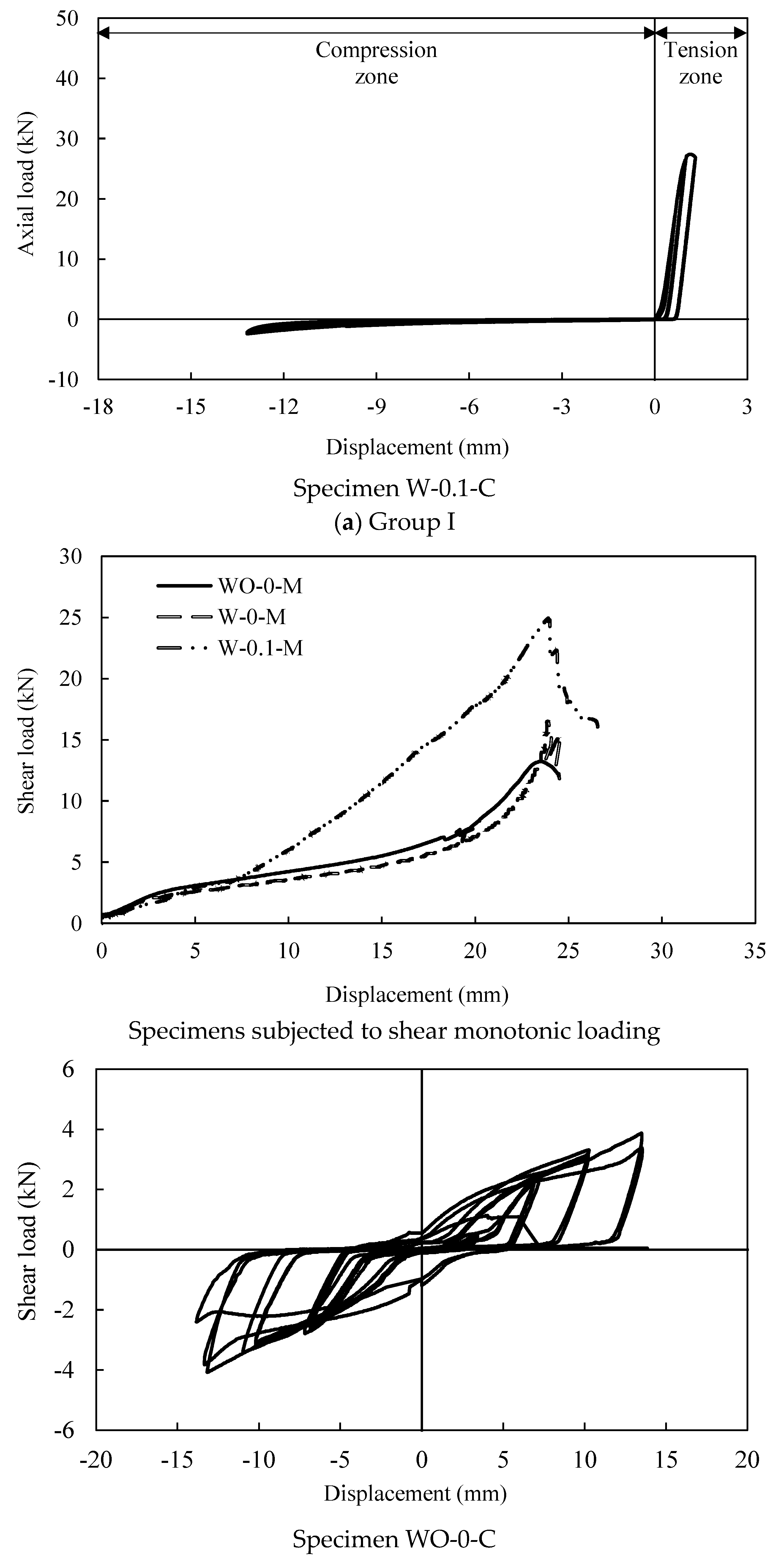
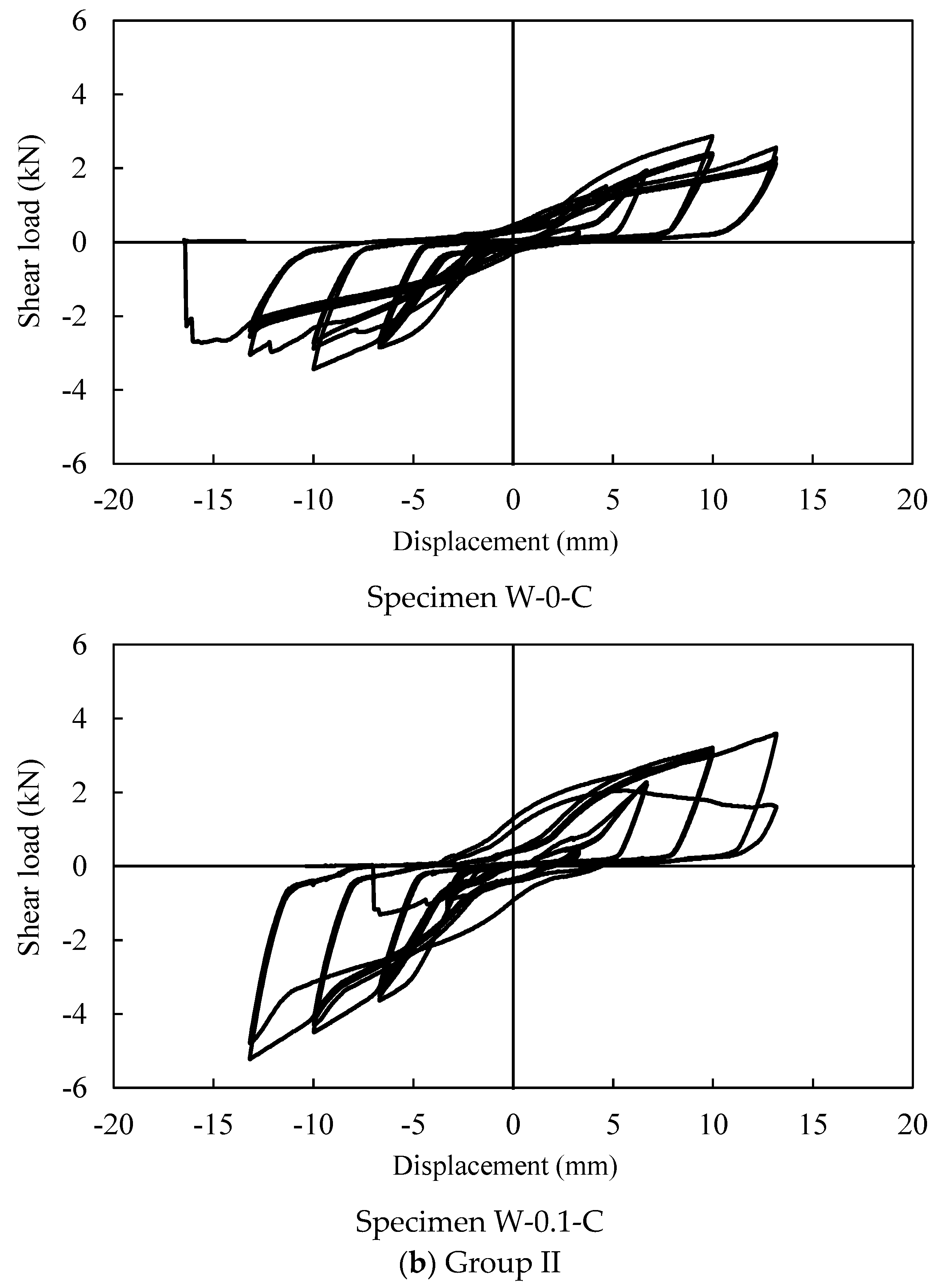
5.2. Load–Displacement Relationships
5.3. Maximum Axial and Shear Loads
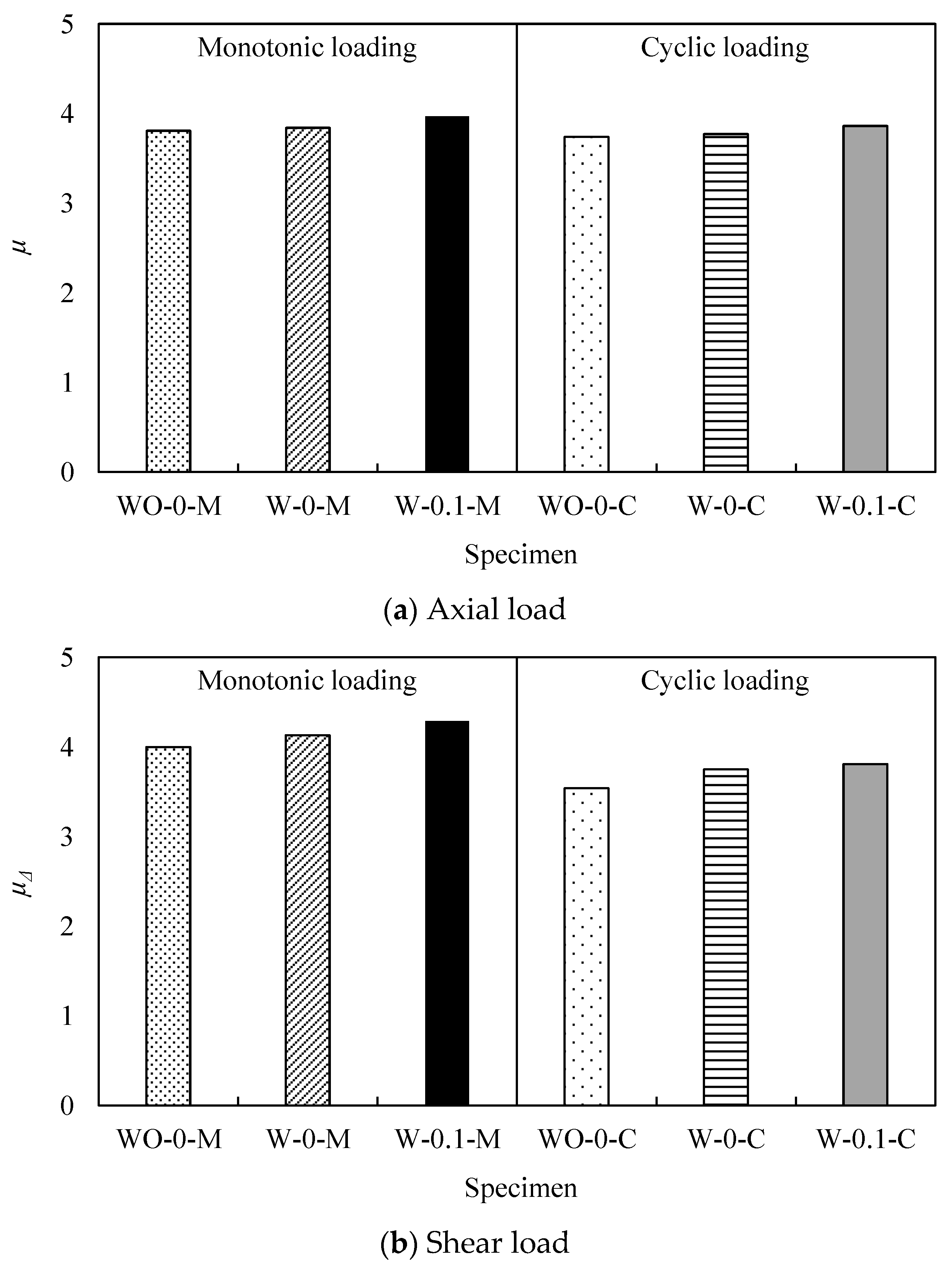
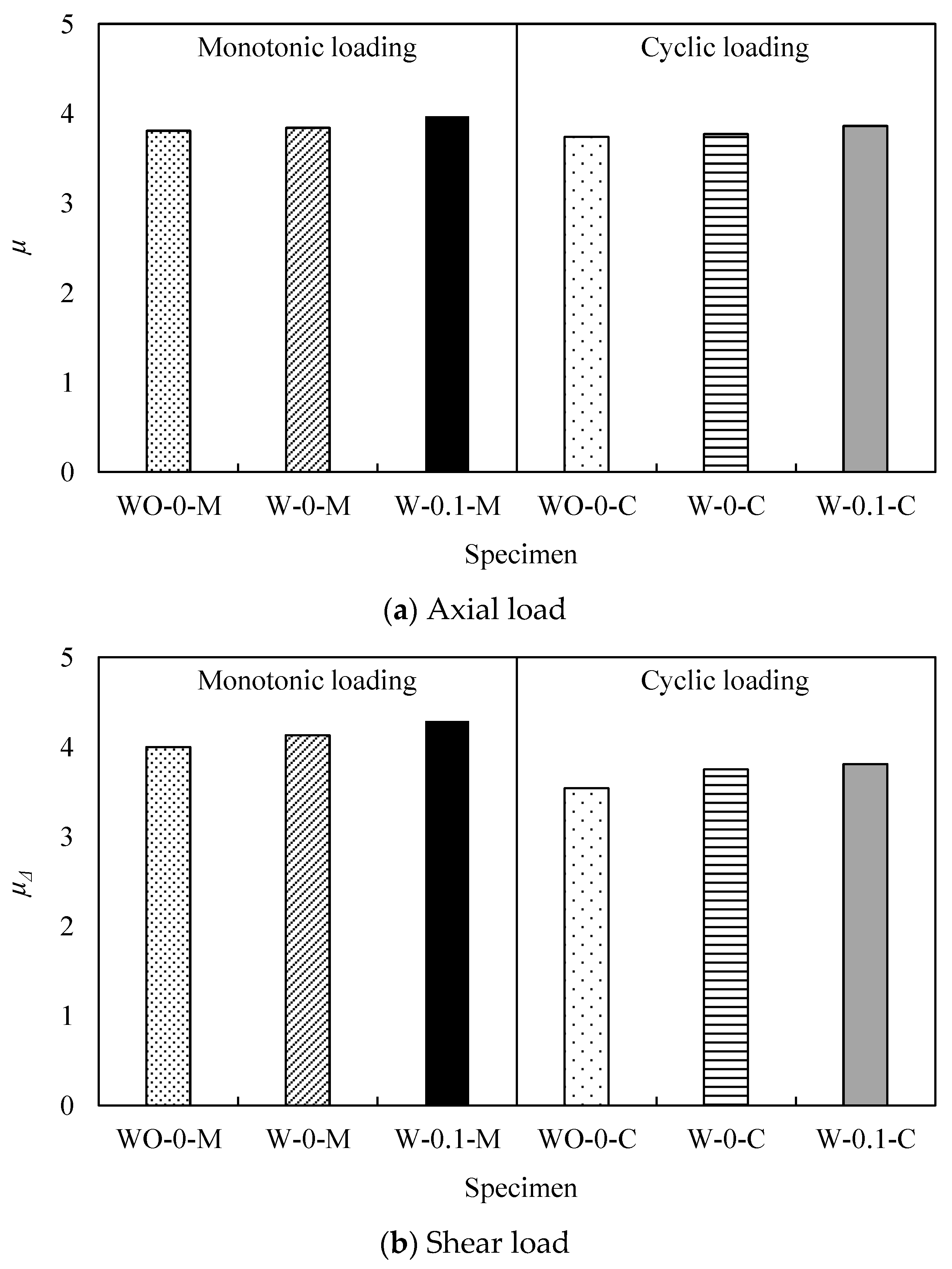
5.4. Ductility Ratio
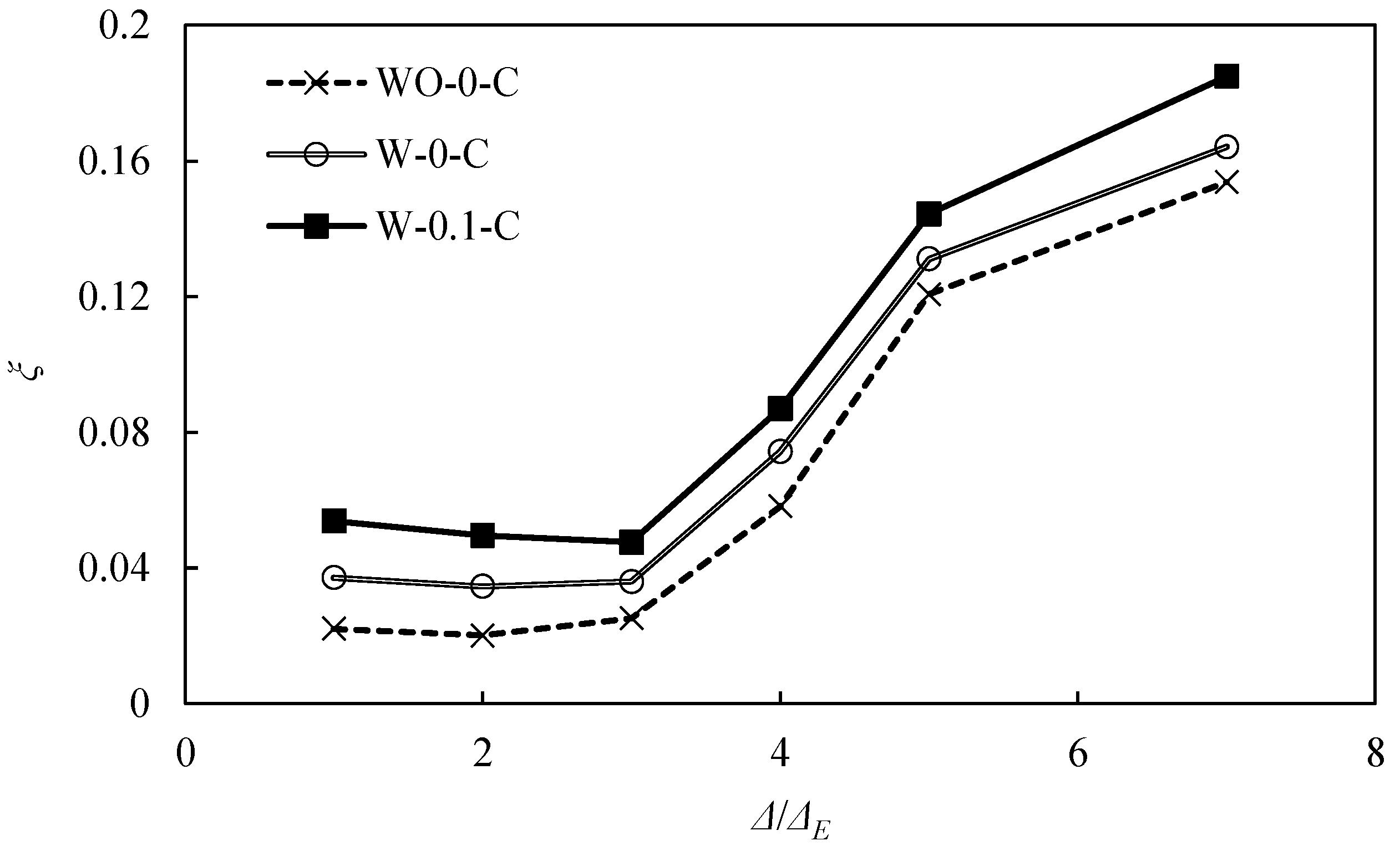
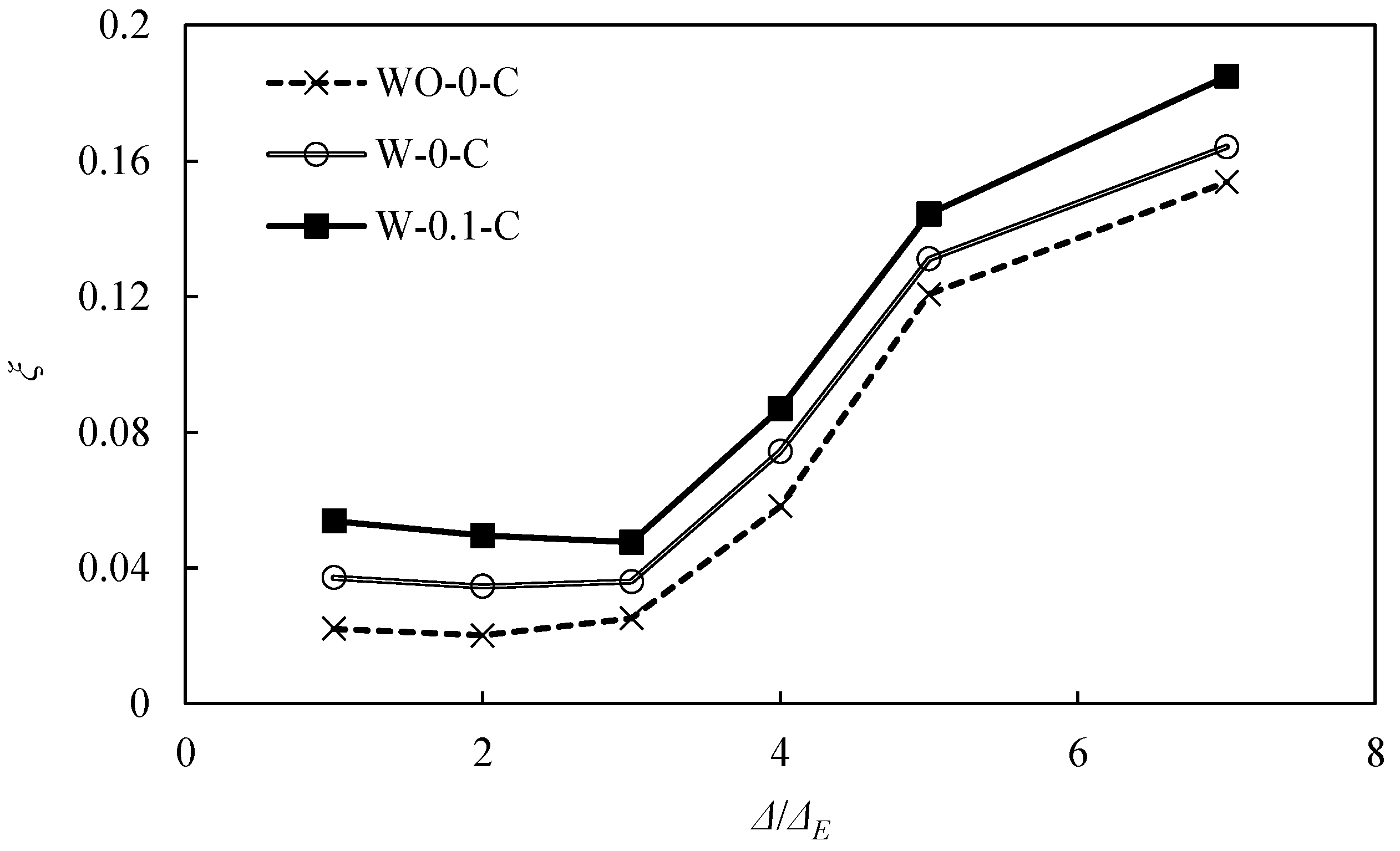
5.5. Equivalent Damping Coefficient
5.6. Optimal Details for SDI
6. Comparisons with Predictions by Codes
6.1. Axial Capacity
6.2. Shear Capacity
7. Conclusions
- The SDI specimens subjected to tensile or shear loading were mainly governed by the fracture of the hexagonal wrench bolts, irrespective of the presence or absence of a spring, prestressed force magnitude, and loading type.
- The tensile and shear capacities of the SDI specimen were 99.8% and 99.5%, respectively, contributed by the hexagonal wrench bolt rather than by the spring or embossing rubber.
- In the relationship of axial or shear load-displacement of the SDI, the post-peak behavior tended to be more ductile for specimens with a spring or higher prestressed force magnitude.
- The ductility ratio and equivalent damping coefficient of the SDI specimens with a spring and 0.1 were 3.81 and 0.166, which was 1.06 and 1.20 times higher than the specimens without a spring and prestressed force. The ductility ratio was approximately 1.07 times higher for the SDI specimens subjected to monotonic loading than for those subjected to cyclic loading.
- The JIS B 2704−1 and AISC specifications estimated the tension capacity of the SDI specimens subjected to monotonic loading well, but overestimated those of the specimens subjected to cyclic loading. Therefore, JIS B 2704−1 and AISC specifications should be underestimated by 15.7% when estimating the tensile load of an SDI subjected to cyclic loading.
- The JIS B 2704−1 and AISC specifications estimated the shear strength of SDI specimens subjected to monotonic loading well, but overestimated those of the specimens subjected to cyclic loading. Hence, JIS B 2704−1 and AISC specifications should be underestimated by 81.7% when estimating the shear load of an SDI subjected to cyclic loading.
- The findings obtained from the comparison between experimental and predicted values of JIS B 2704−1 and AISC can only be applied to SDI with limited detail in the study. Therefore, the safety of JIS B 2704−1 and AISC should be further verified in SDI with different details.
- Based on the results of the post-peak behavior in the load–displacement relationship, displacement ductility ratio, and equivalent damping coefficient, the combinations of two embossed rubber layers, a spring, and a prestressed force magnitude of 0.1 was determined to be the optimal detail of the SDI.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Gilani, A.S.J.; Reinhorn, A.M.; Glasgow, B.; Lavan, O.; Miyamoto, H.K. Earthquake Simulator Testing and Seismic Evaluation of Suspended Ceilings. J. Arch. Eng. 2010, 16, 63–73. [Google Scholar] [CrossRef]
- Fiorino, L.; Bucciero, B.; Landolfo, R. Evaluation of Seismic Dynamic Behaviour of Drywall Partitions, Façades and Ceilings through Shake Table Testing. Eng. Struct. 2019, 180, 103–123. [Google Scholar] [CrossRef]
- American Society of Civil Engineers (ASCE). Seismic Evaluation and Retrofit of Existing Buildings; ASCE/SEI 41–17; American Society of Civil Engineers: Reston, VA, USA, 2017. [Google Scholar]
- BSI. Eurocode 8: Design of Structures for Earthquake Resistance; EN 1998–1:2003; BSI: London, UK, 2003. [Google Scholar]
- Bejarbaneh, A.P. Seismic Performance of Suspended Ceilings. Ph.D. Thesis, Canterbury University, Christchurch, New Zealand, 2017. [Google Scholar]
- Fiorino, L.; Shakeel, S.; Landolfo, R. Seismic Behaviour of a Bracing System for LWS Suspended Ceilings: Preliminary Experimental Evaluation Through Cyclic Tests. Thin Walled Struct. 2020, 155, 106956. [Google Scholar] [CrossRef]
- Jiang, H.; Wang, Y.; He, L. Study of Seismic Performance of Chinese–Style Single–Layer Suspended Ceiling System by Shaking Table Tests. Adv. Civ. Eng. 2021, 2021, 1–14. [Google Scholar] [CrossRef]
- Luo, Z.; Xue, J.; Zhou, T.; Qi, L.; Zhao, X. Shaking Table Tests and Seismic Design Suggestions for Innovative Suspended Ceiling Systems with Detachable Metal Panels. Eng. Struct. 2021, 232, 111830. [Google Scholar] [CrossRef]
- Lee, J.S. Seismic Design and Performance Evaluation of In–Direct Suspended Ceiling System with Steel Panels using Shaking Table Test. Ph.D. Thesis, Ajou University, Kyonggi, Korea, 2021. [Google Scholar]
- Kurita, K.; Aoki, S.; Nakanishi, Y.; Tominaga, K.; Kanazawa, M. Fundamental Characteristics of Reduction System for Seismic Response Using Friction Force. J. Civ. Eng. Arch. 2011, 5, 1042–1047. [Google Scholar]
- Wu, L.; Zhang, X.; Kuang, F.; Wang, W.; Guo, H. Comparison of different damping materials during train vibration at twin tunnels by similarity experiment and DEM. Constr. Build. Mater. 2022, 317, 126054. [Google Scholar] [CrossRef]
- JIS B 2704–1. Coil Springs–Part 1: Basic Calculation Methods; Japanese Standards Association: Tokyo, Japan, 2018. [Google Scholar]
- American Institute of Steel Construction (AISC). Steel Construction Manual; American Institute of Steel Construction: Chicago, IL, USA, 2017. [Google Scholar]
- AASHTO LRFD. LRFD Bridge Design Specifications, 9th ed.; American Association of State Highway and Transportation Officials: Washington, DC, USA, 2004. [Google Scholar]
- D’Aniello, M.; Cassiano, D.; Landolfo, R. Monotonic and Cyclic Inelastic Tensile Response of European Preloadable Gr10.9 Bolt Assemblies. J. Constr. Steel Res. 2016, 124, 77–90. [Google Scholar] [CrossRef]
- Watson, S.; Park, R. Simulated Seismic Load Tests on Reinforced Concrete Columns. J. Struct. Eng. ASCE 1994, 120, 1825–1849. [Google Scholar] [CrossRef]
- Hwang, S.H.; Kim, S.; Mun, J.H.; Yang, K.H. In–Plane Seismic Performance of Open Masonry Walls Retrofitted with Steel–Bar Truss Units. Constr. Build. Mater. 2022, 320, 126278. [Google Scholar] [CrossRef]
- Im, C.R.; Yang, K.H.; Kim, S.; Mun, J.H. Flexural Performance of Lightweight Aggregate Concrete Columns. Eng. Struct. 2022, 251, 113545. [Google Scholar] [CrossRef]
- Kulak, G.L.; Fisher, J.W.; Struik, J.H.A. Guide to Design Criteria for Bolted and Riveted Joints, 2nd ed.; American Institute of Steel Construction: Hoboken, NJ, USA, 1974. [Google Scholar]
- Oh, N.K. Evaluation on Seismic Performance of Precast Lightweight Concrete Shear Walls. Master’s Thesis, Kyonggi University, Kyonggi, Korea, 2021. [Google Scholar]
- Yang, K.H.; Mun, J.H.; Im, C.R. Flexural Behaviour of Lightweight Aggregate Concrete Columns. Mag. Concr. Res. 2022, 74, 905–918. [Google Scholar] [CrossRef]
- Federal Emergency Management Agency. Prestandard and Commentary for the Seismic Rehabilitation of Buildings; FEMA 356; Federal Emergency Management Agency: Washington, DC, USA, 2000. [Google Scholar]
- Priestley, M.J.N. Displacement–Based Seismic Assessment of Reinforced Concrete Buildings. J. Earthq. Eng. 1997, 1, 157–192. [Google Scholar] [CrossRef]
- Priestley, M.J.N.; Calvi, G.M.; Kowalsky, M.J. Direct Displacement−Based Seismic Design of Structures; IUSS Press: Pavia, Italy, 2007. [Google Scholar]
- Han, J.W.; Park, Y.S. Experimental Study on Tensile Fatigue Strength of the High Strength Bolts. J. Kor. Soc. Civ. Eng. 2008, 28, 63–73. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Group | Specimens | Behavior Type | Presence or Absence of a Spring | Prestressed Force | Loading Type |
|---|---|---|---|---|---|
| I | WO-0-M | Axial | Absence | 0 | Monotonic |
| W-0-M | Presence | 0 | |||
| W-0.1-M | Presence | ||||
| WO-0-C | Absence | 0 | Cyclic | ||
| W-0-C | Presence | 0 | |||
| W-0.1-C | Presence | ||||
| II | WO-0-M | Shear | Absence | 0 | Monotonic |
| W-0-M | Presence | 0 | |||
| W-0.1-M | Presence | ||||
| WO-0-C | Absence | 0 | Cyclic | ||
| W-0-C | Presence | 0 | |||
| W-0.1-C | Presence |
| Type | Diameter (mm) | Yield Strength (MPa) | Tensile Strength (MPa) | Elastic Modulus (MPa) | Spring Contrast (N/mm) |
|---|---|---|---|---|---|
| Plate | 35 | 247.0 | 339.2 | 169,752 | − |
| Bolt | 4 | 1146.2 | 1220.7 | 186,552 | − |
| Spring | 12 | 1158.0 | 1300.0 | 190,000 | 7.84 |
| Rubber | 35 | − | 20.3 | 145 | − |
| Specimens | Compression Zone | Tension Zone | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| WO-0-M | 0.39 | 3.5 | 4.50 | 15.0 | 86.7 | 233.3 | 13.5 | 31.3 | 0.36 | 1.37 | 28,125.0 | 21,586.2 | 3.81 |
| W-0-M | 0.58 | 3.8 | 4.58 | 14.9 | 126.5 | 255.0 | 13.1 | 32.4 | 0.37 | 1.42 | 30,465.1 | 22,657.3 | 3.84 |
| W-0.1-M | 0.52 | 3.9 | 4.03 | 13.7 | 128.9 | 284.7 | 13.7 | 35.2 | 0.37 | 1.47 | 31,136.4 | 23,945.6 | 3.97 |
| WO-0-C | 0.30 | 2.1 | 3.3 | 13.2 | 90.9 | 159.1 | 6.0 | 27.4 | 0.34 | 1.27 | 18,181.8 | 20,601.5 | 3.74 |
| W-0-C | 0.36 | 2.9 | 3.3 | 13.2 | 109.1 | 219.7 | 6.5 | 27.6 | 0.35 | 1.32 | 19,697.0 | 20,751.9 | 3.77 |
| W-0.1-C | 0.40 | 3.7 | 3.3 | 13.2 | 121.2 | 280.3 | 7.0 | 28.8 | 0.35 | 1.35 | 21,875.0 | 21,654.1 | 3.86 |
| Specimens | ||||||||
|---|---|---|---|---|---|---|---|---|
| WO-0-M | 2.75 | 19.3 | 5.57 | 22.3 | 493.7 | 865.5 | 4.00 | − |
| W-0-M | 3.83 | 21.5 | 5.78 | 23.9 | 662.6 | 899.6 | 4.13 | − |
| W-0.1-M | 5.24 | 24.8 | 5.80 | 24.9 | 903.4 | 996.0 | 4.29 | − |
| WO-0-C | 0.45 | 2.75 | 3.40 | 12.1 | 132.4 | 228.2 | 3.54 | 0.138 |
| W-0-C | 0.65 | 3.85 | 3.53 | 13.3 | 184.1 | 290.6 | 3.75 | 0.148 |
| W-0.1-C | 0.85 | 4.45 | 3.60 | 13.7 | 236.1 | 324.8 | 3.81 | 0.166 |
| Group | Specimens | (kN) (1) | (kN) (2) | (kN) (3) | (kN) (4) | (1)/(2) | (3)/(4) |
|---|---|---|---|---|---|---|---|
| I | WO-0-M | 31.3 | 32.1 | − | − | 0.98 | − |
| W-0-M | 32.4 | 32.2 | − | − | 1.01 | − | |
| W-0.1-M | 35.2 | 35.2 | − | − | 1.00 | − | |
| WO-0-C | 27.4 | 32.1 | − | − | 0.85 | − | |
| W-0-C | 27.6 | 32.2 | − | − | 0.86 | − | |
| W-0.1-C | 28.8 | 35.2 | − | − | 0.82 | − | |
| II | WO-0-M | − | − | 19.3 | 19.3 | − | 1.00 |
| W-0-M | − | − | 21.5 | 19.3 | − | 1.11 | |
| W-0.1-M | − | − | 24.9 | 21.1 | − | 1.18 | |
| WO-0-C | − | − | 2.75 | 19.3 | − | 0.14 | |
| W-0-C | − | − | 3.85 | 19.3 | − | 0.20 | |
| W-0.1-C | − | − | 4.45 | 21.1 | − | 0.21 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, K.-H.; Mun, J.-H.; Im, C.-R. Axial and Shear Behavior of Prestressed Damping Isolation Units Using a Spring and Rubbers. Buildings 2022, 12, 1379. https://doi.org/10.3390/buildings12091379
Yang K-H, Mun J-H, Im C-R. Axial and Shear Behavior of Prestressed Damping Isolation Units Using a Spring and Rubbers. Buildings. 2022; 12(9):1379. https://doi.org/10.3390/buildings12091379
Chicago/Turabian StyleYang, Keun-Hyeok, Ju-Hyun Mun, and Chae-Rim Im. 2022. "Axial and Shear Behavior of Prestressed Damping Isolation Units Using a Spring and Rubbers" Buildings 12, no. 9: 1379. https://doi.org/10.3390/buildings12091379
APA StyleYang, K.-H., Mun, J.-H., & Im, C.-R. (2022). Axial and Shear Behavior of Prestressed Damping Isolation Units Using a Spring and Rubbers. Buildings, 12(9), 1379. https://doi.org/10.3390/buildings12091379