
Precise Calibration of the Continuous Surface Cap Model for Concrete Simulation

 ,
,  and
and 
Abstract
:1. Introduction
2. Materials and Methods
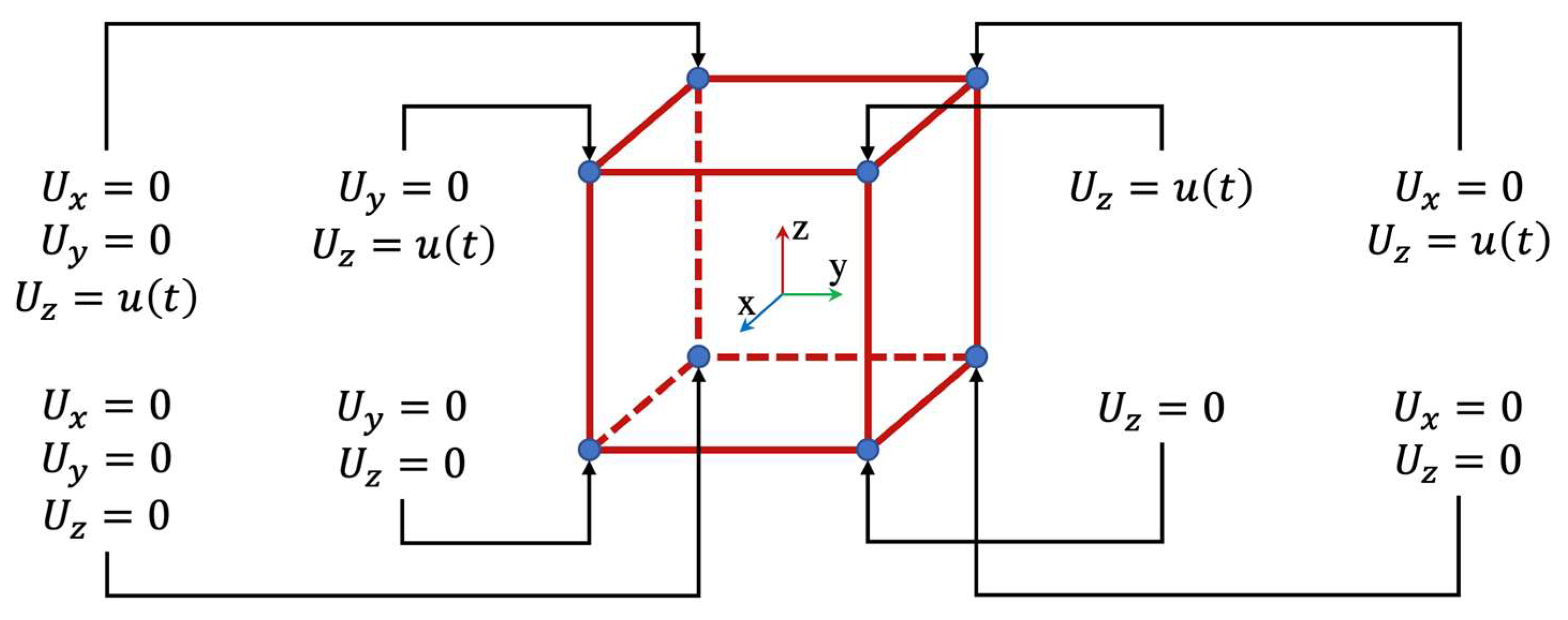
2.1. A Mechanics Problem
2.1.1. Equation of Motion
- At the boundary , essential boundary conditions: ;
- At the boundary , natural boundary conditions: ;
- At the boundary , contact boundary conditions: .
2.1.2. Conservation Laws
2.2. Concrete Material Model
2.2.1. Elastic Behavior
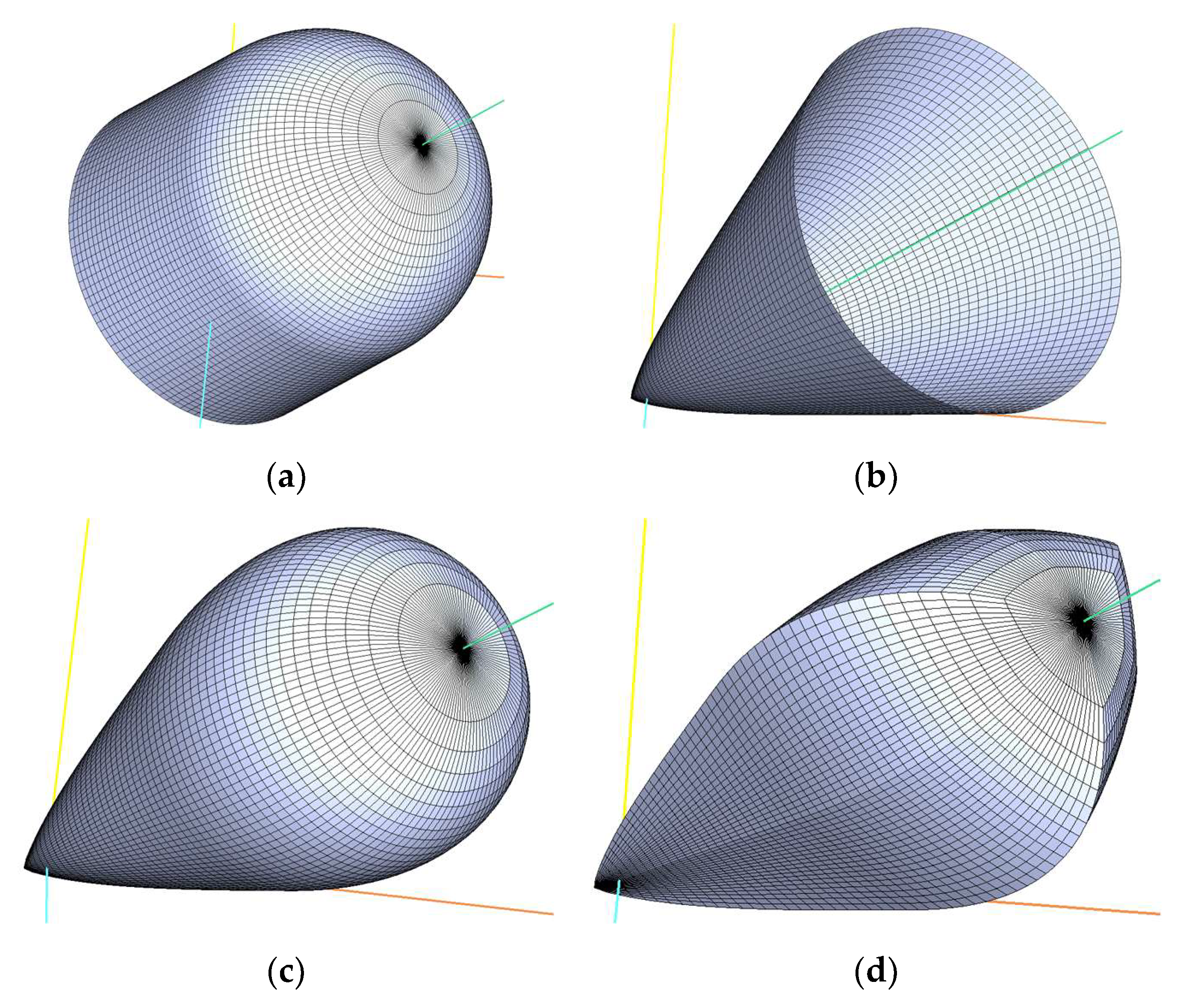
2.2.2. Strength Surface
2.2.3. Triaxial Compression
2.2.4. Cap Surface
2.2.5. Triaxial Extension and Torsional Conditions
2.2.6. Scaling Function
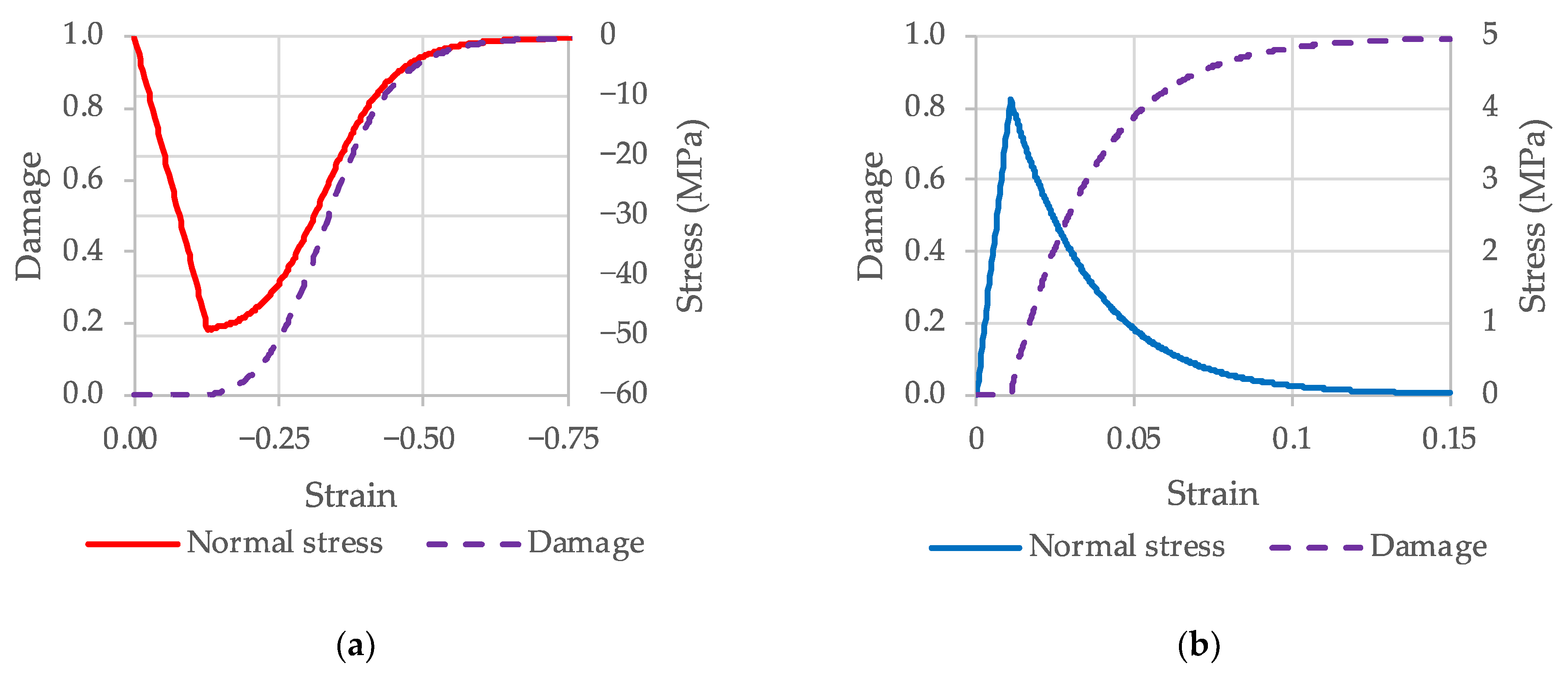
2.2.7. Damage
2.2.8. Strain Rate
2.2.9. Material Model Calibration
2.3. Original Verification
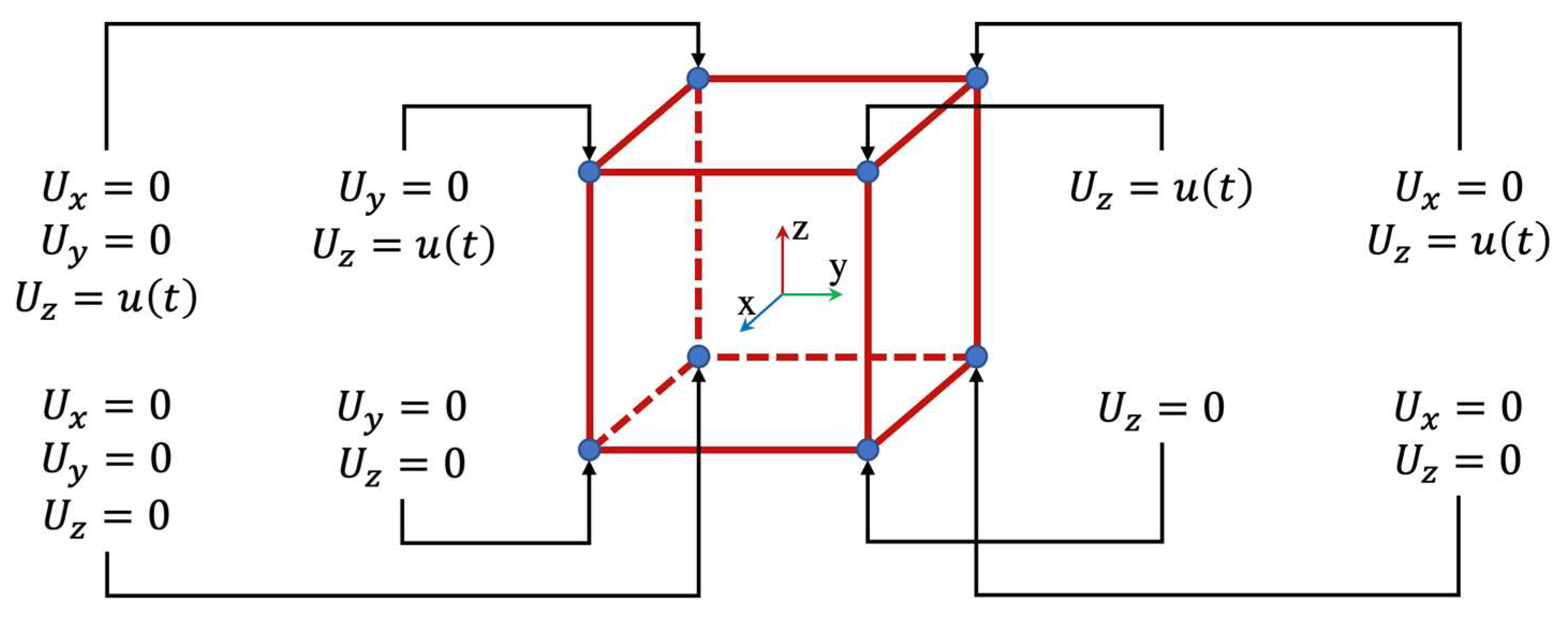
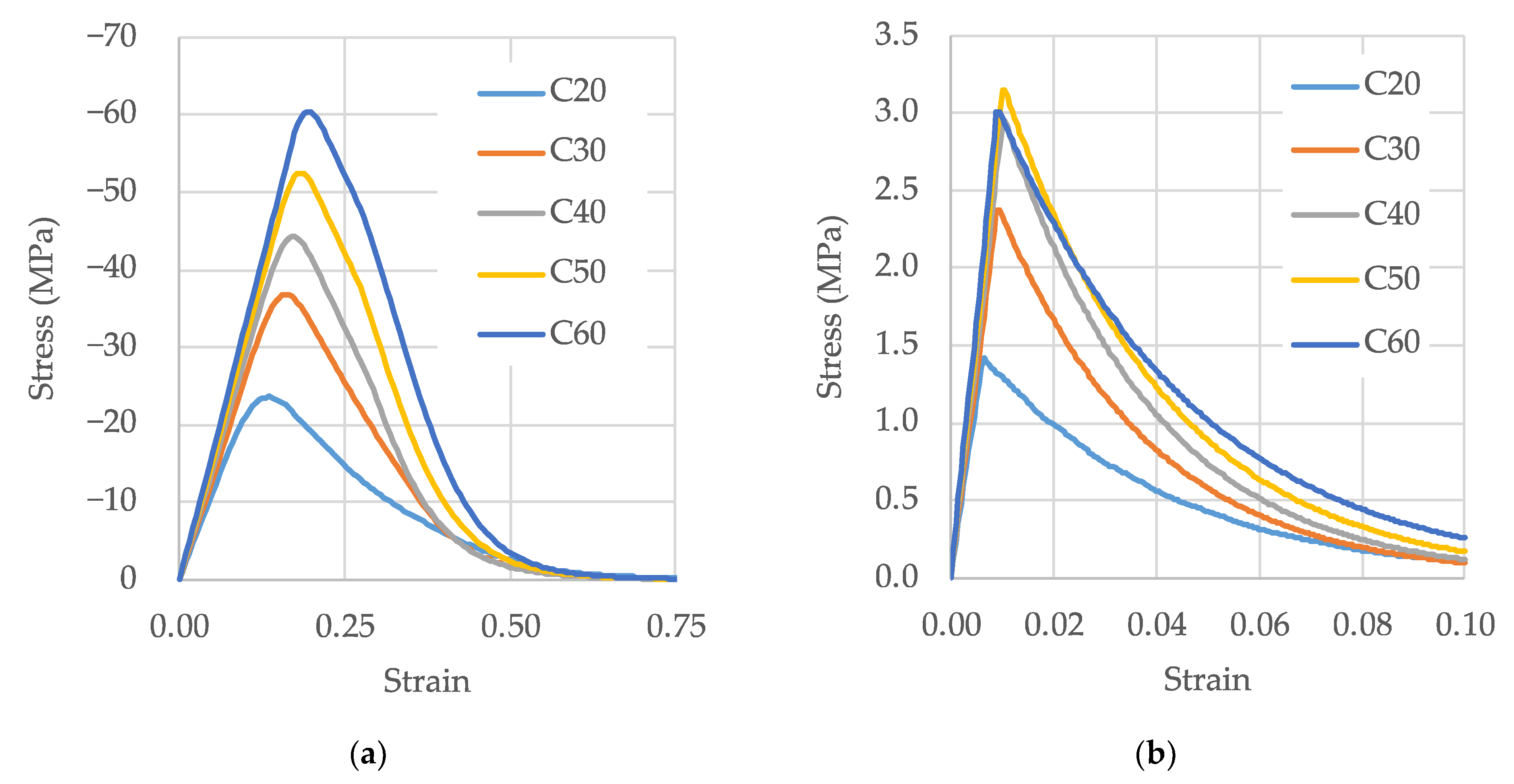
2.3.1. Single Element Strength Estimation
2.3.2. Single Element Fracture Energy Estimation
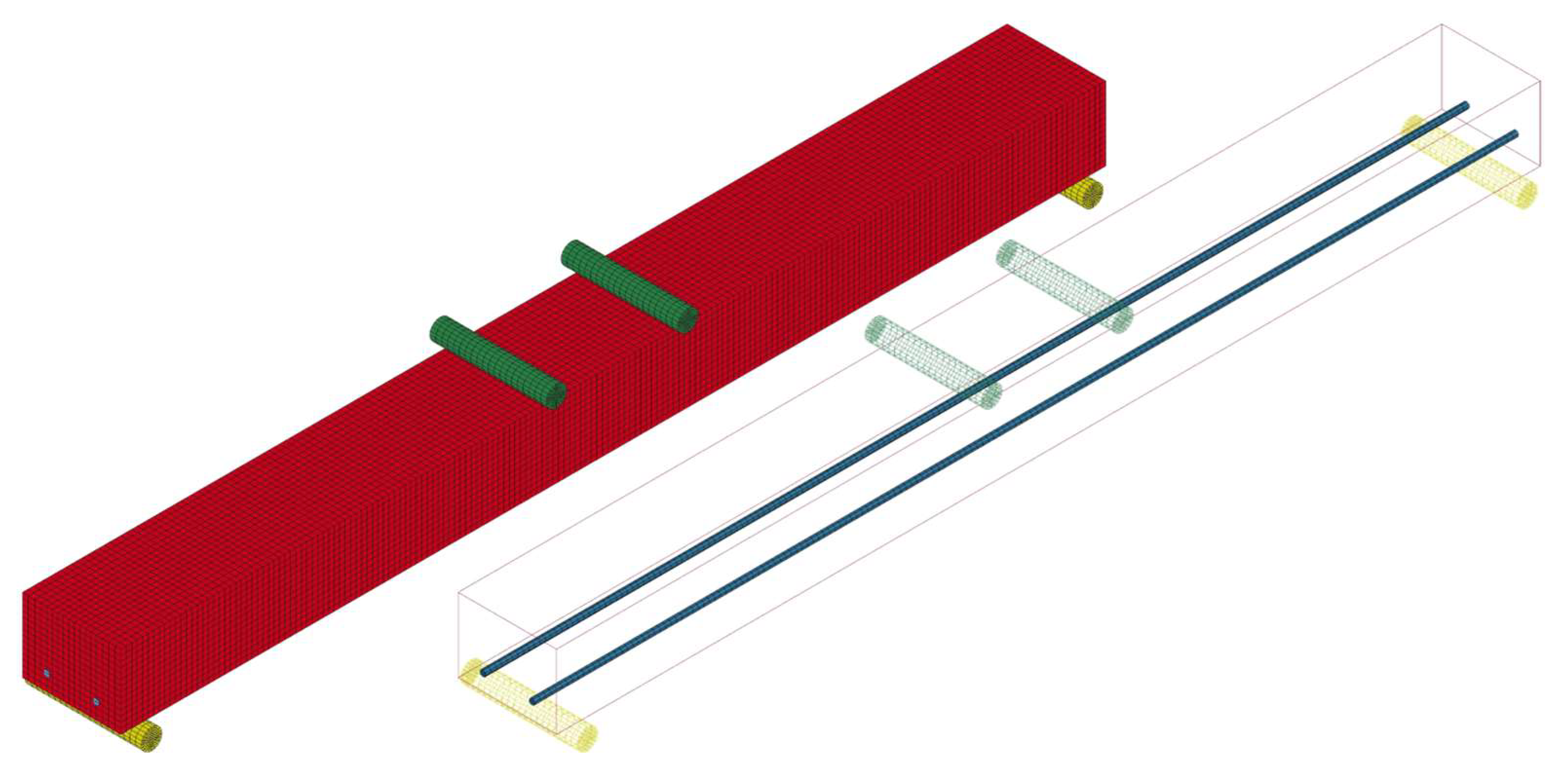
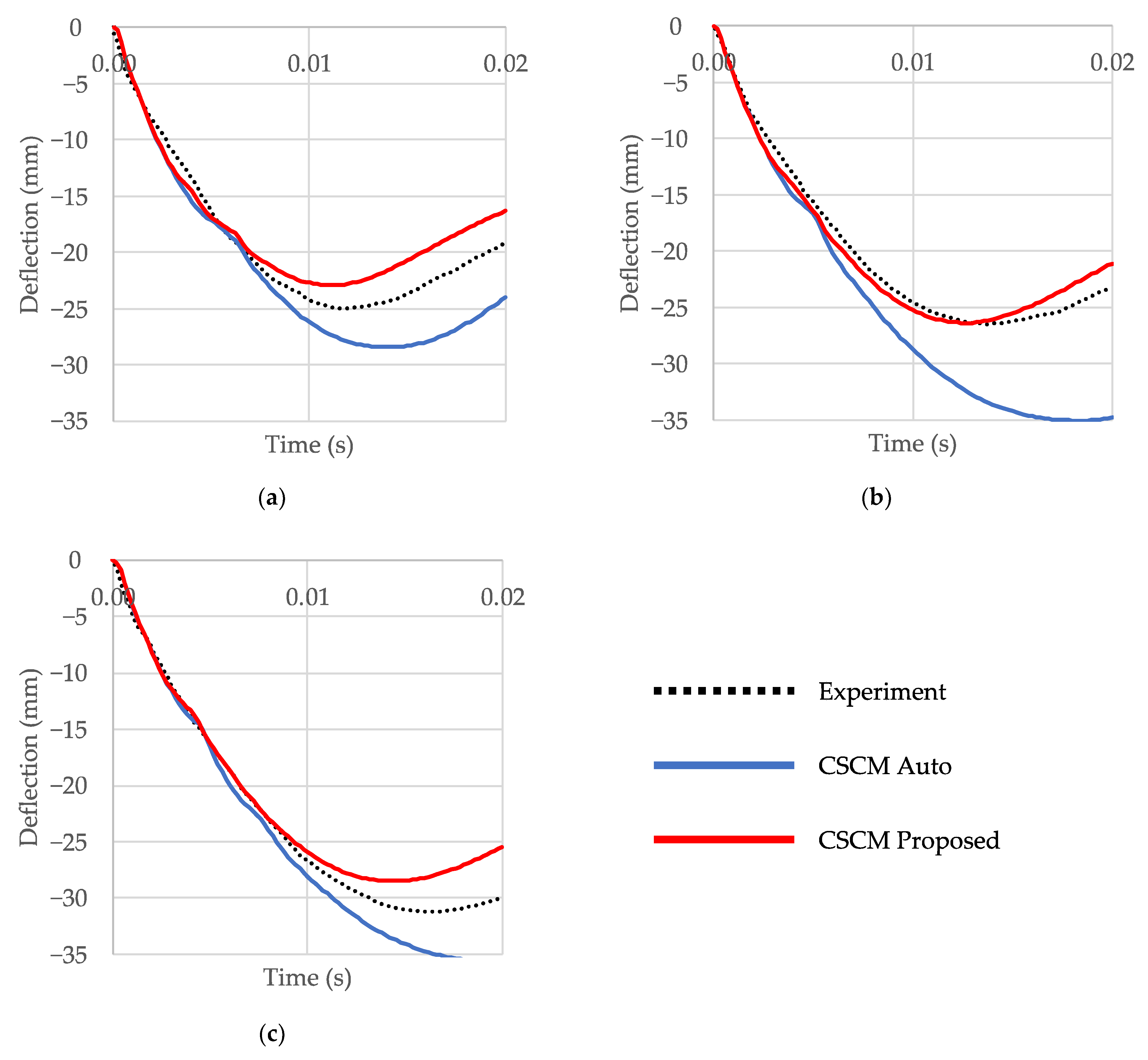
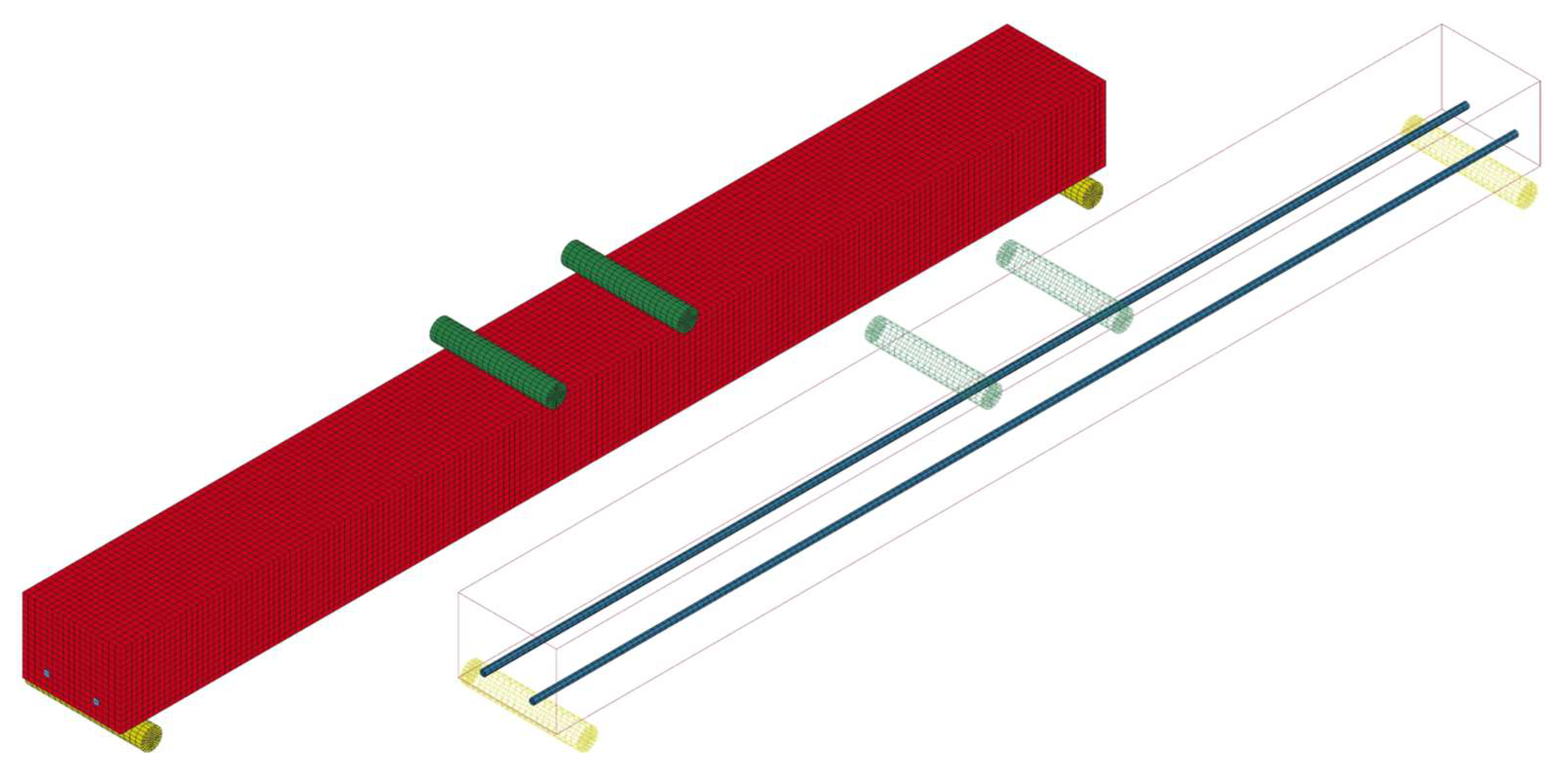
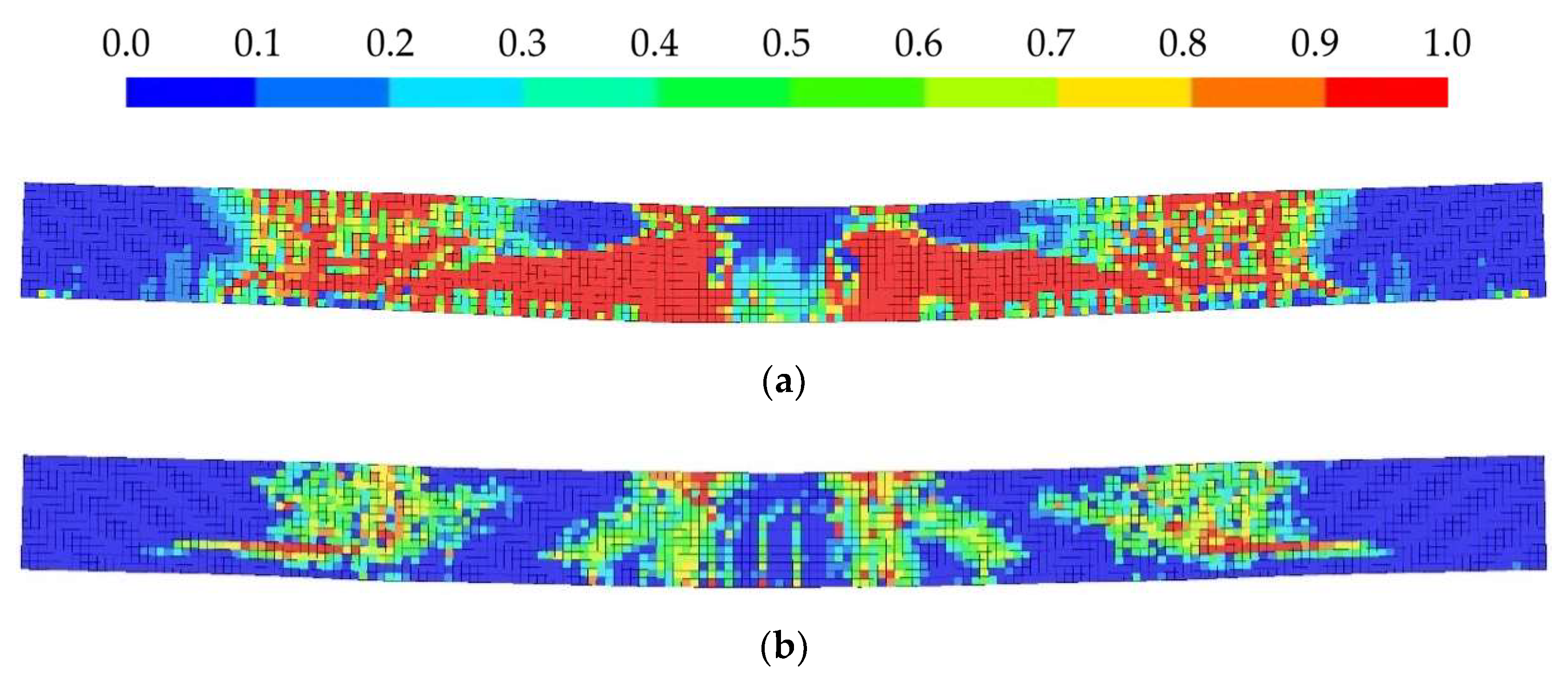
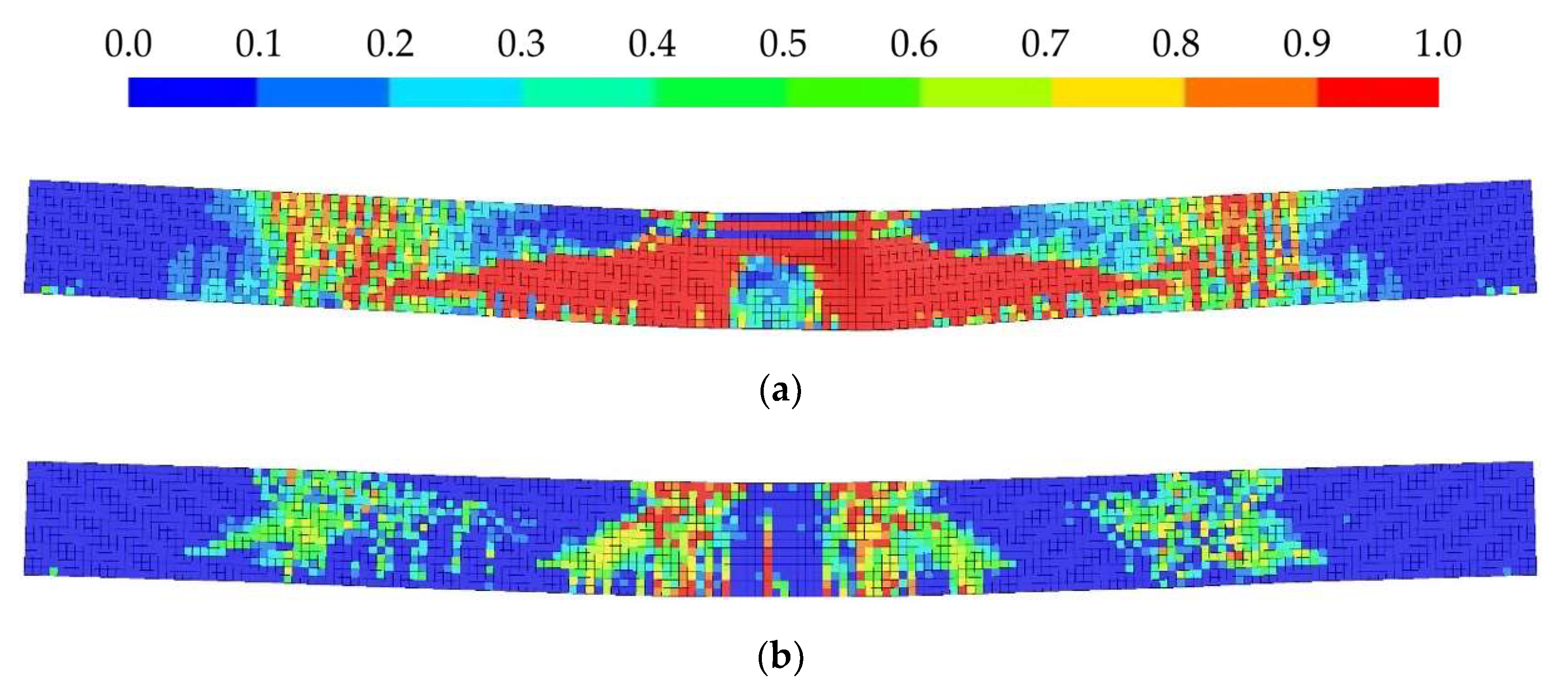
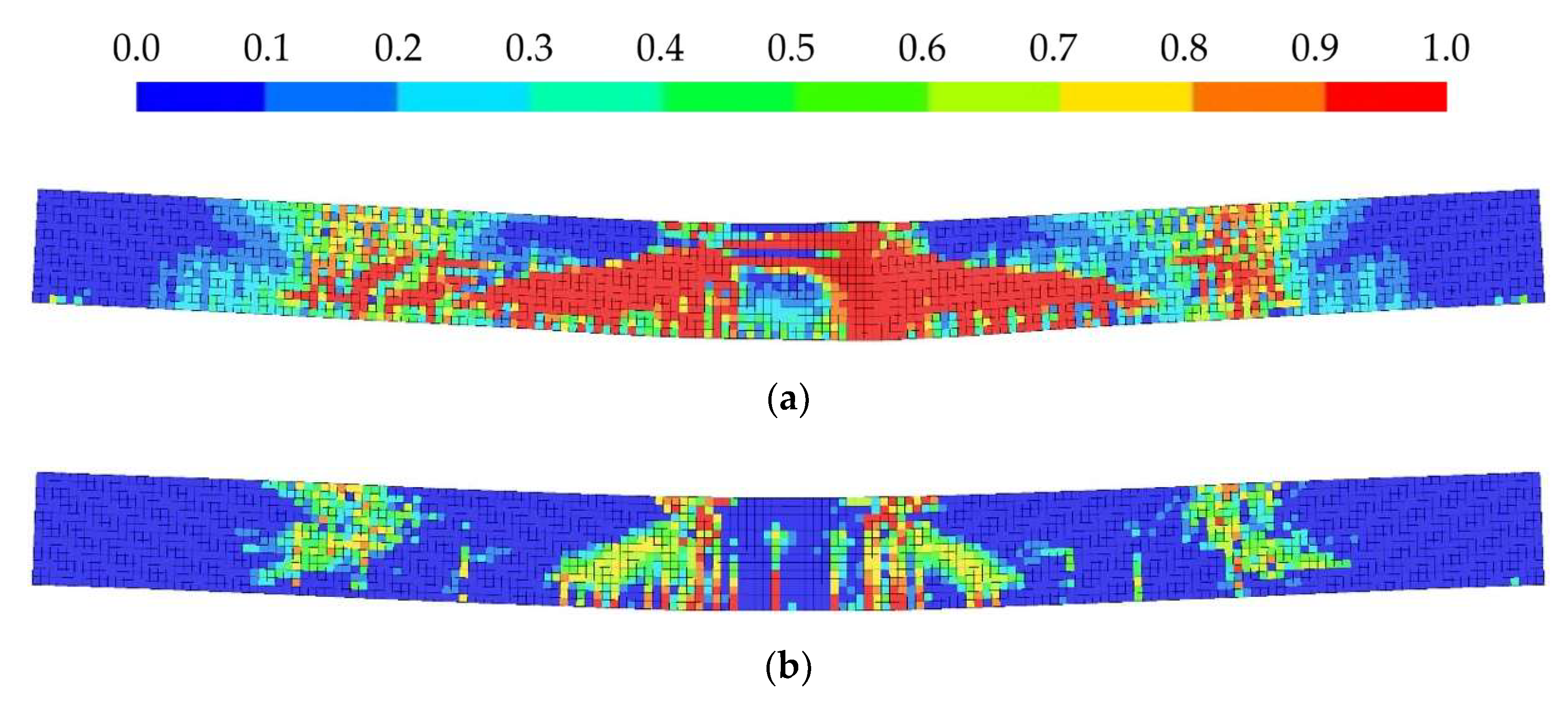
2.3.3. Impact on the RC Beam
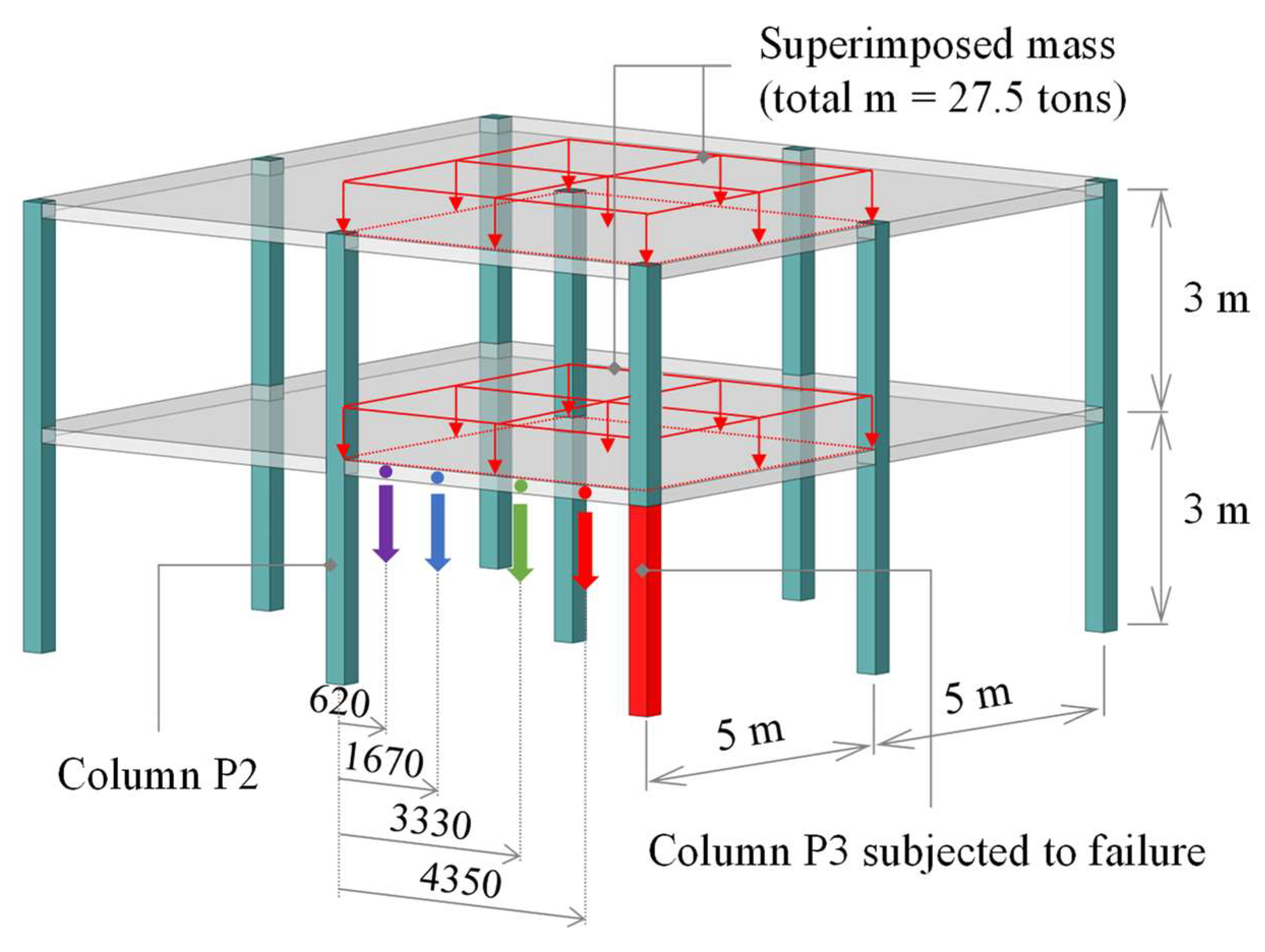
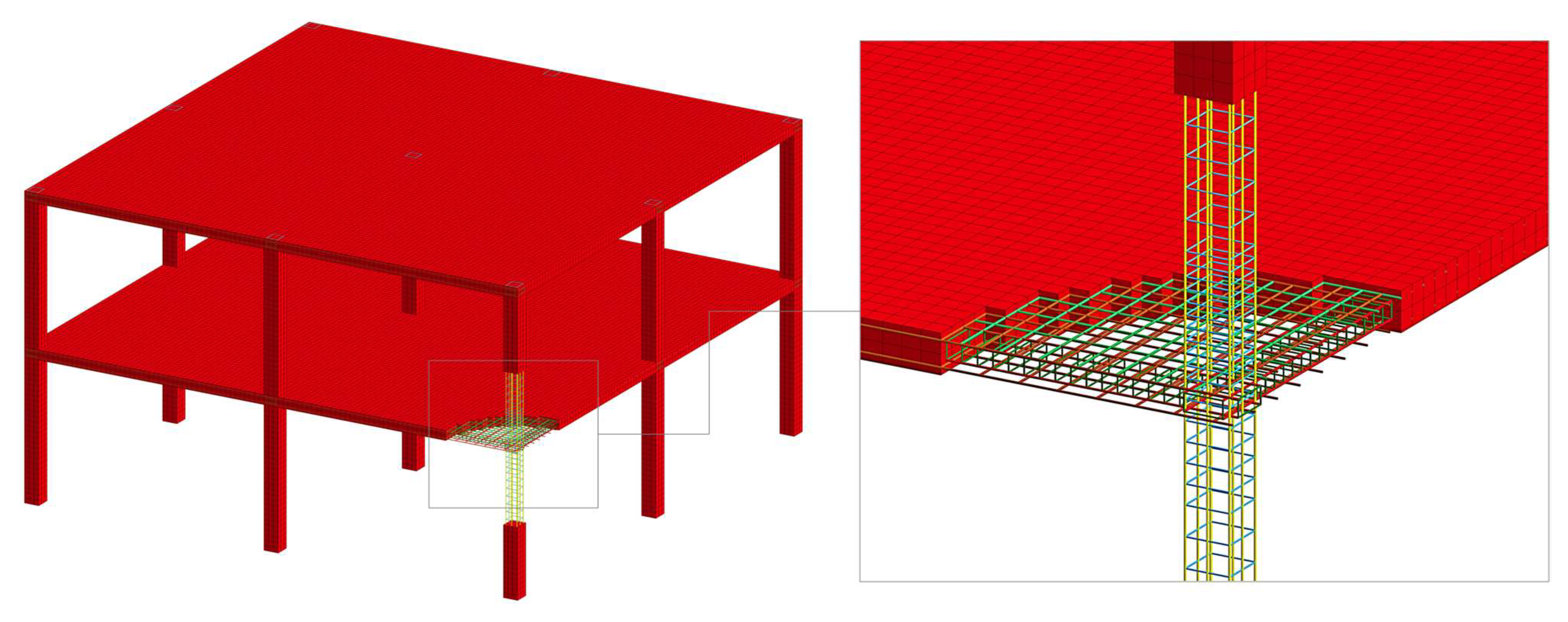
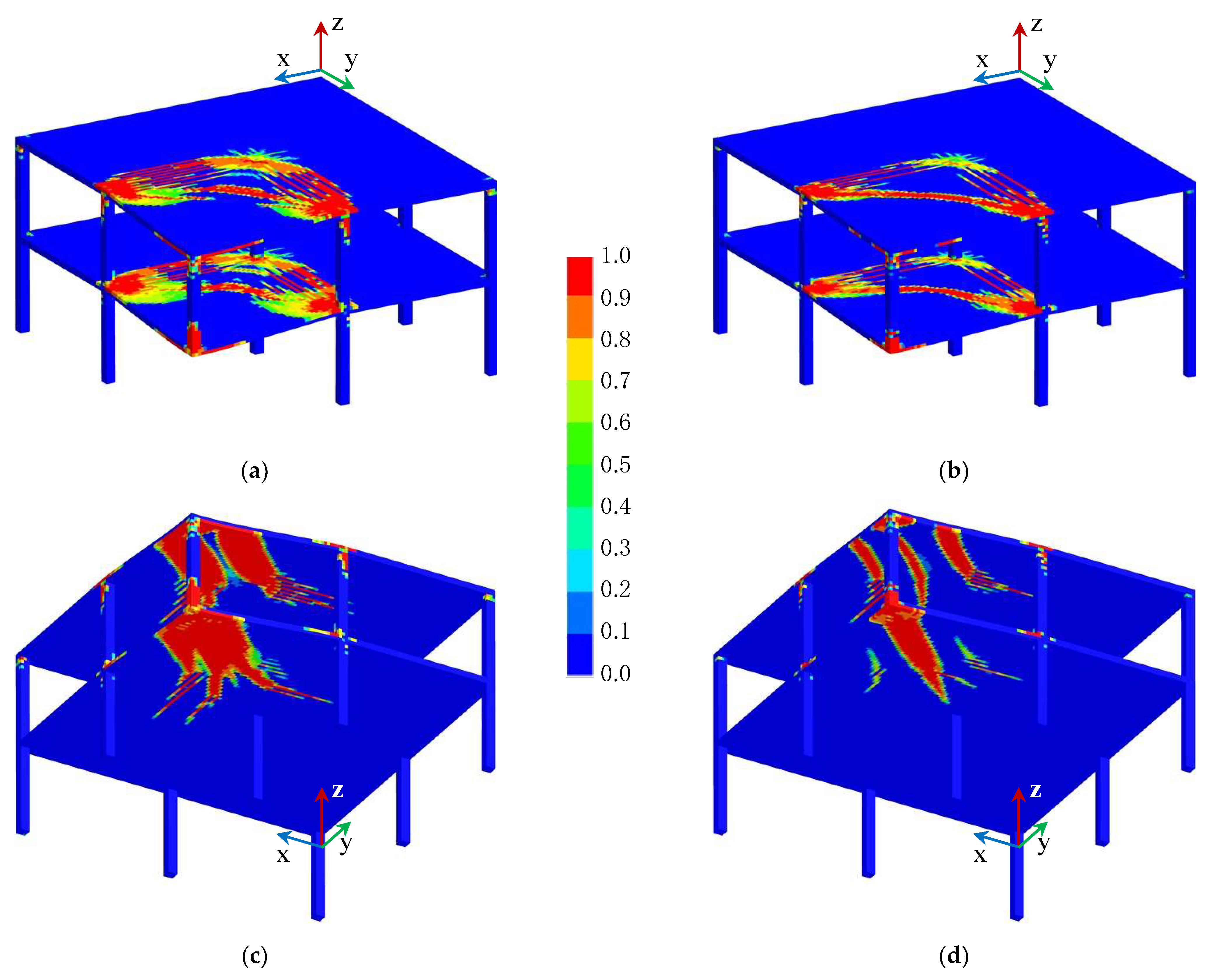
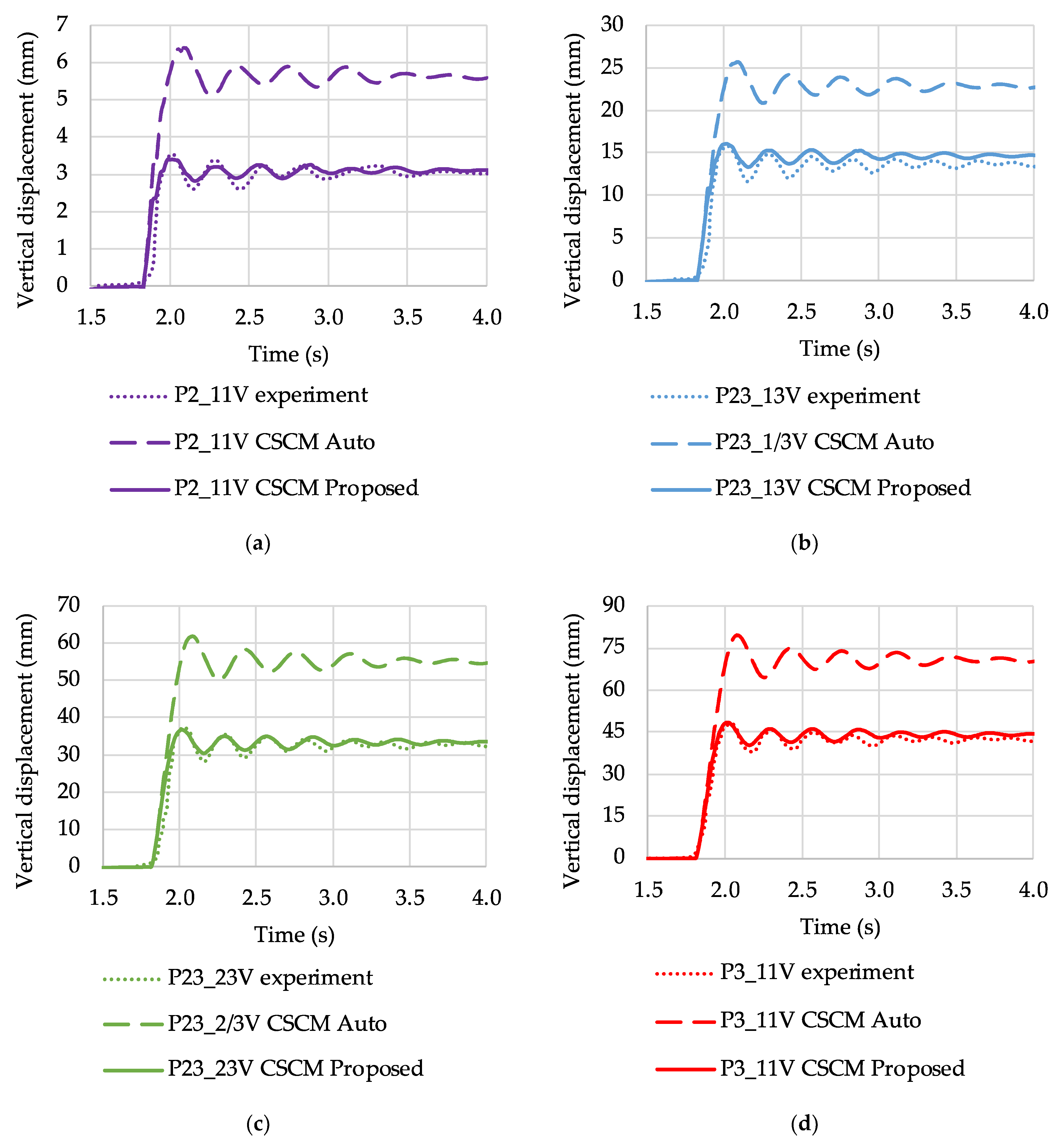
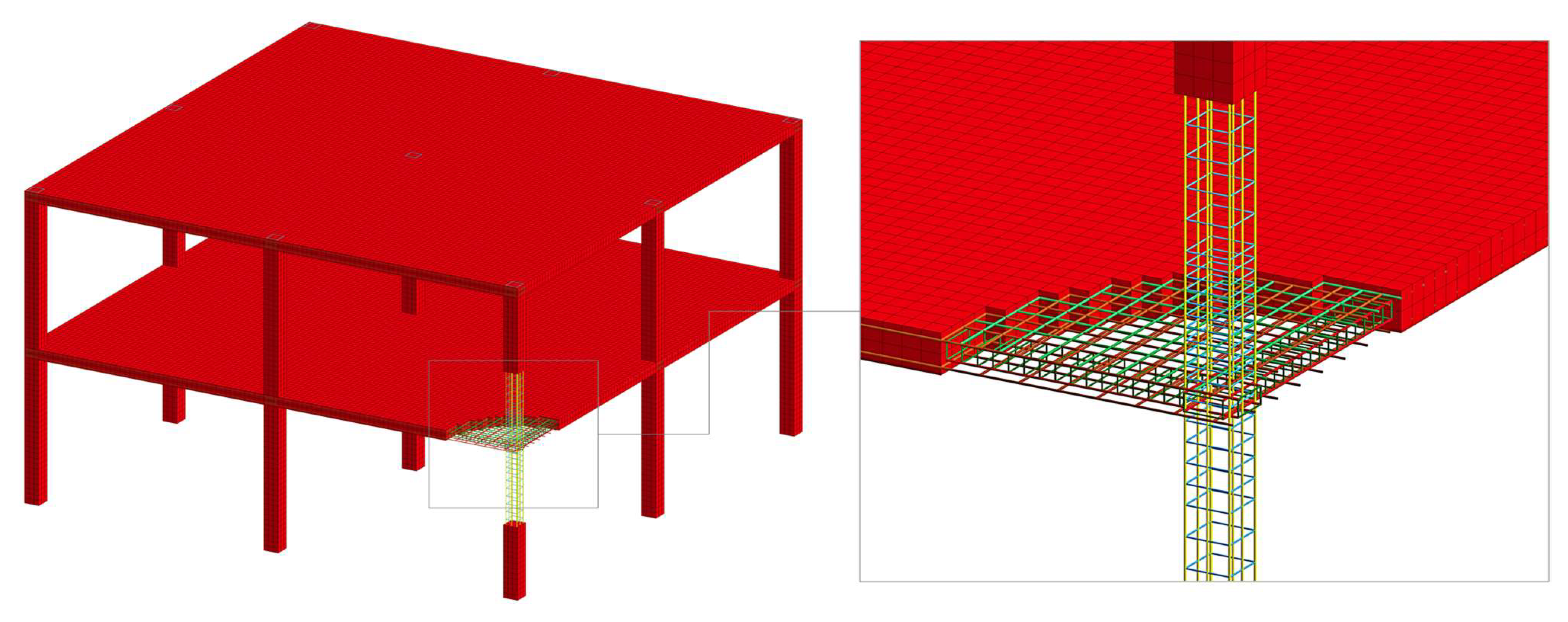
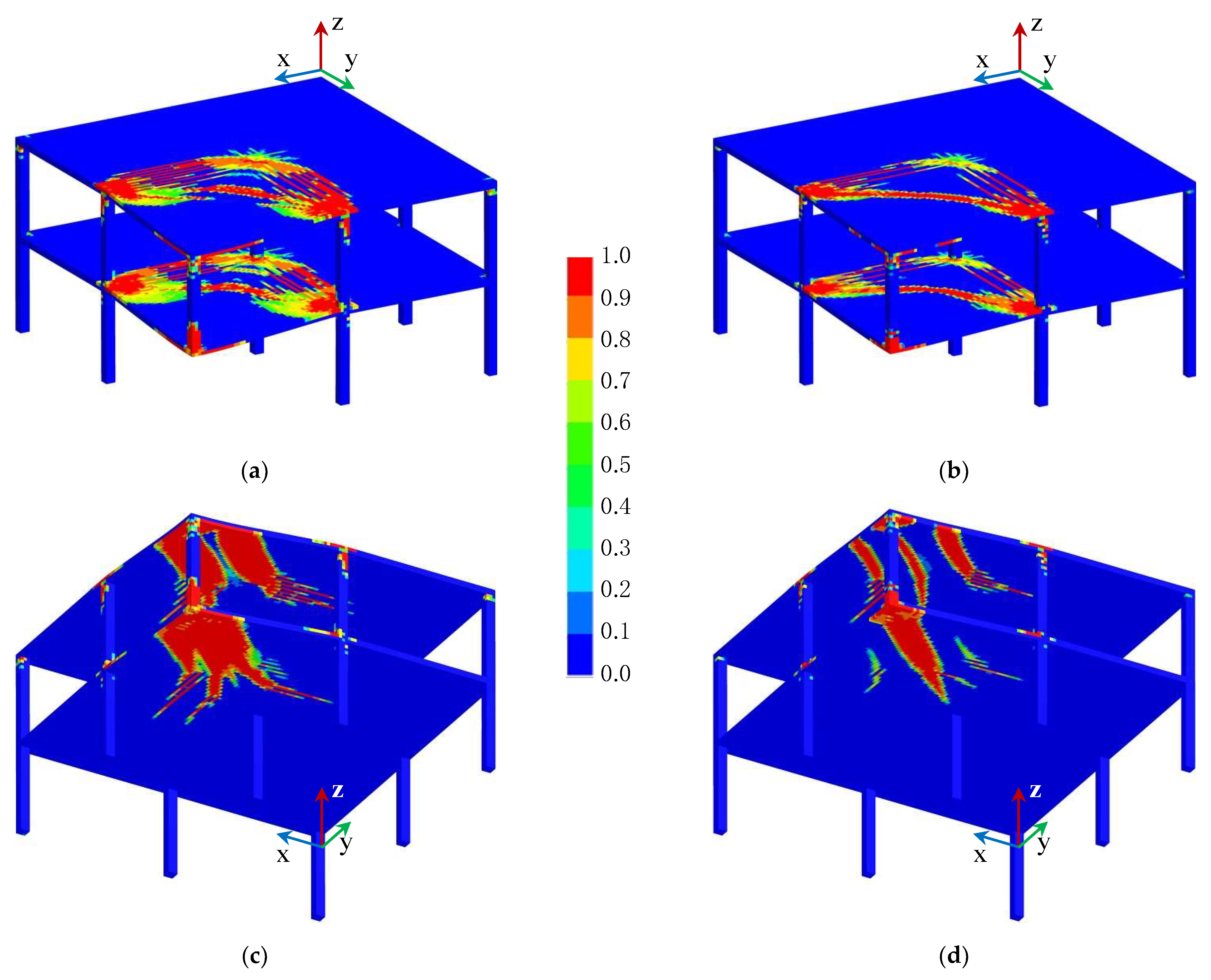
2.3.4. Two-Story Frame Progressive Collapse
3. Results and Discussion
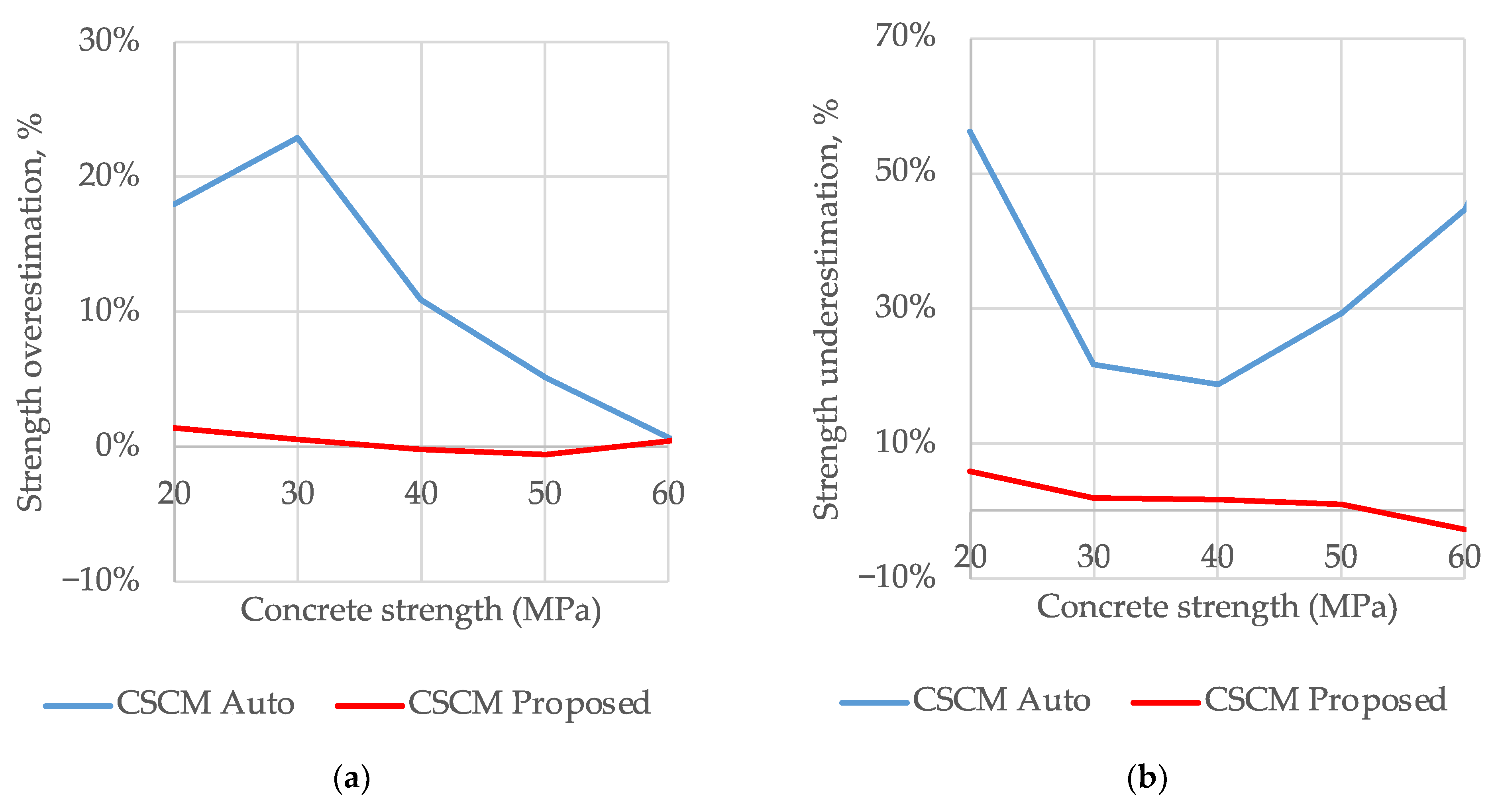
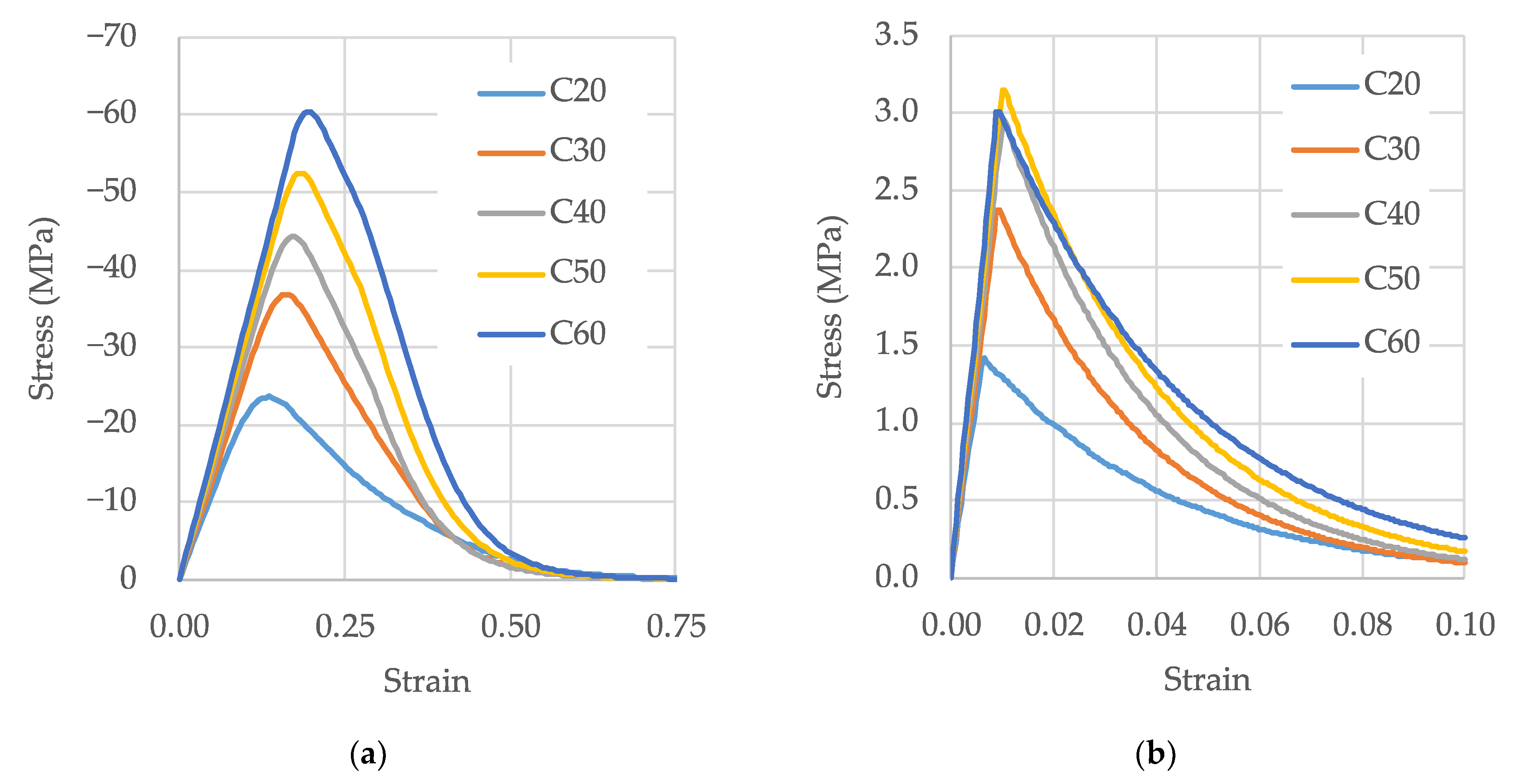
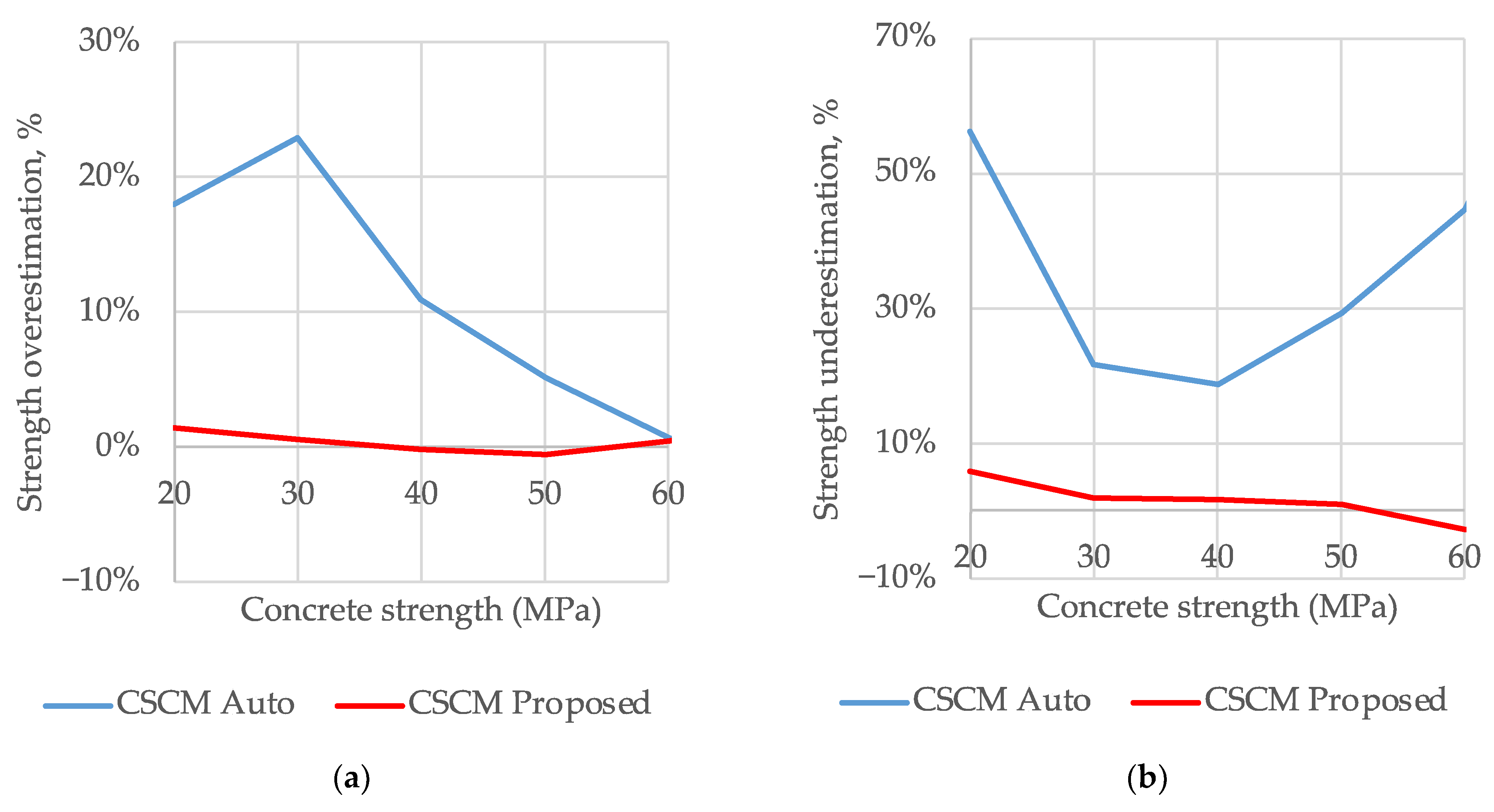
3.1. Single Element Strength Estimation
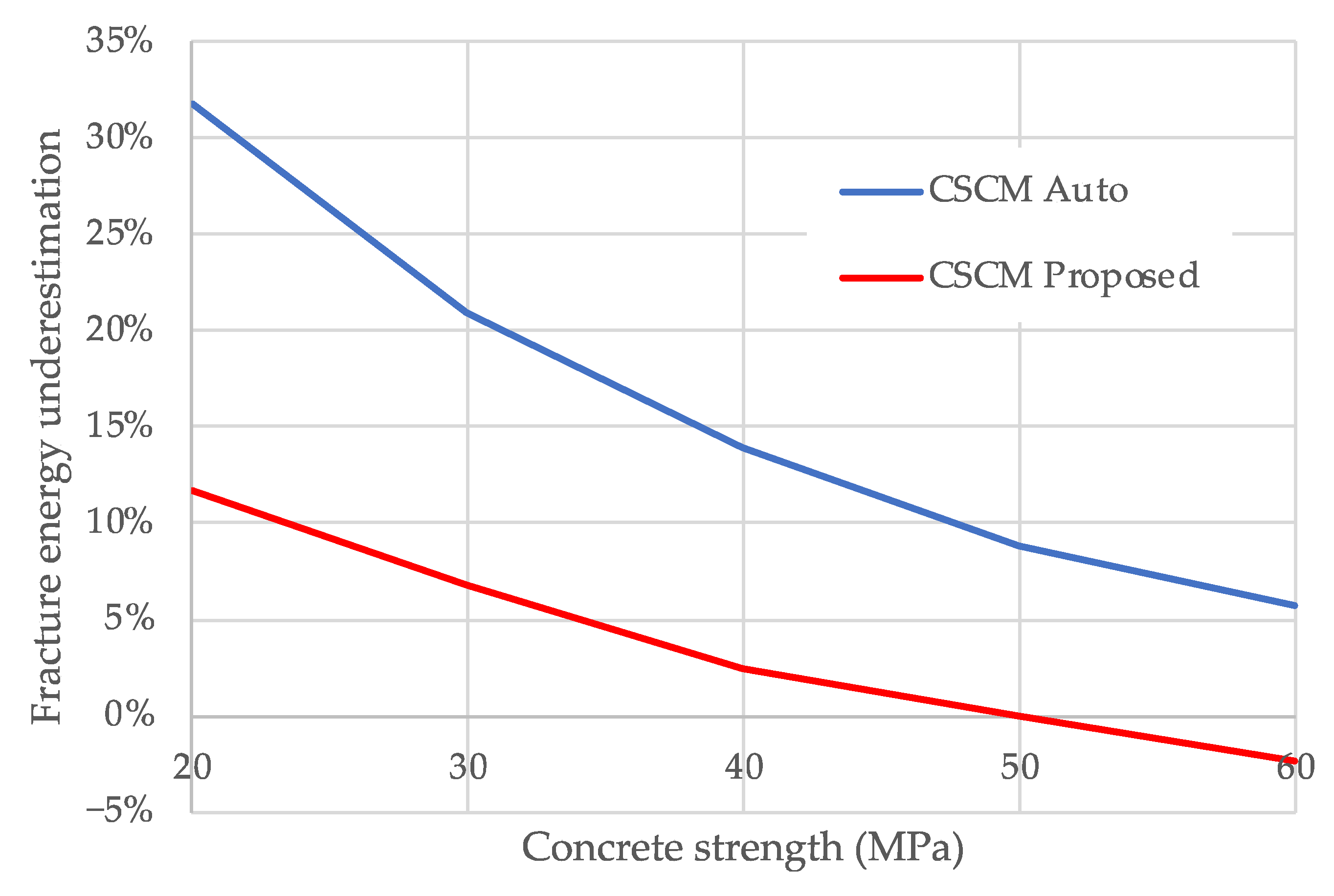
3.2. Single Element Fracture Energy Estimation
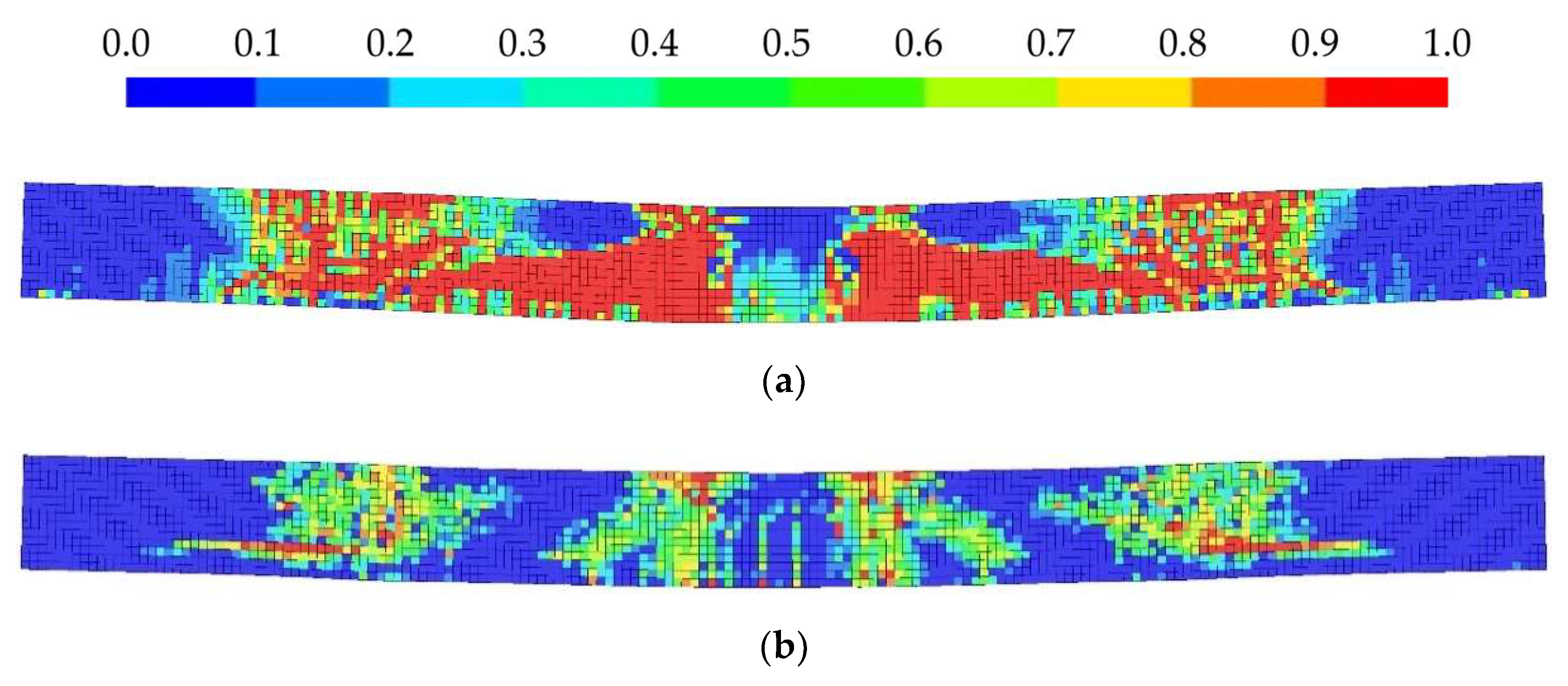
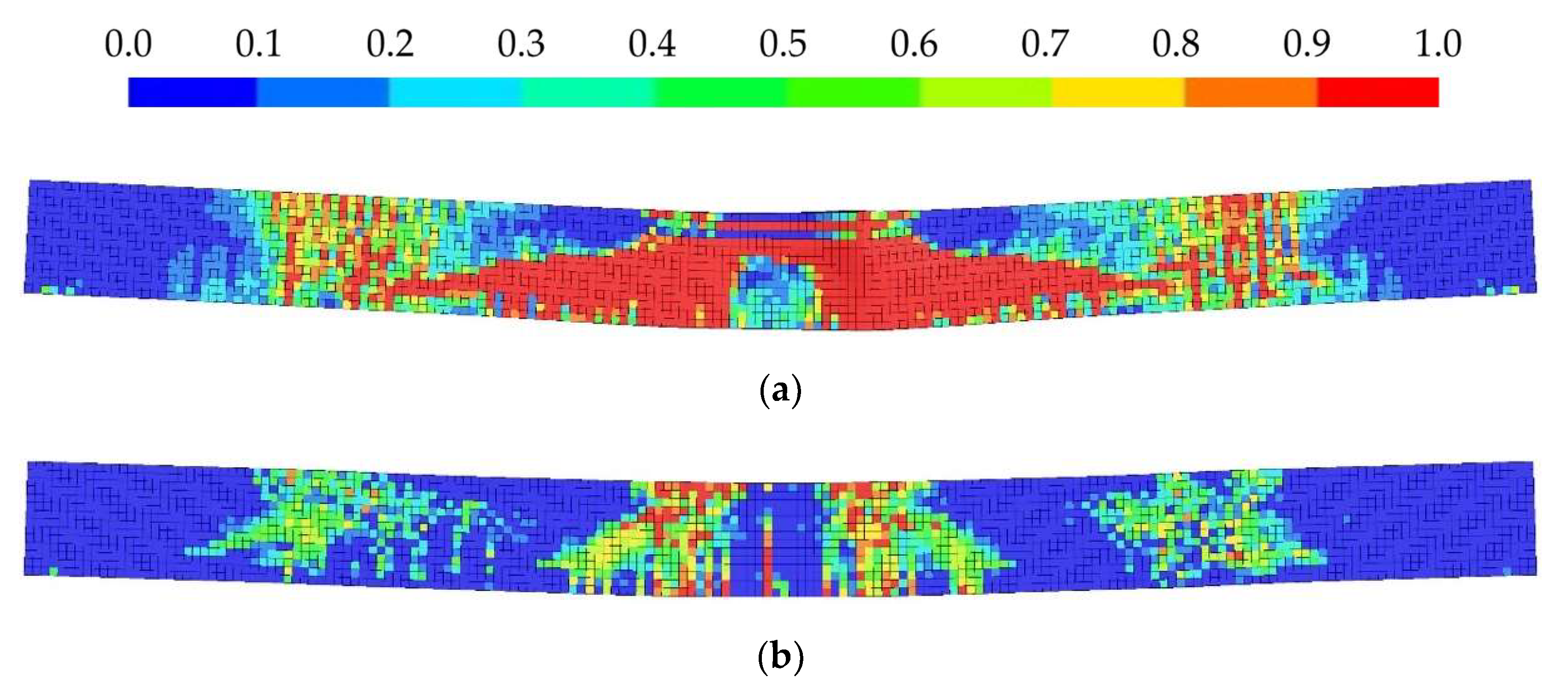
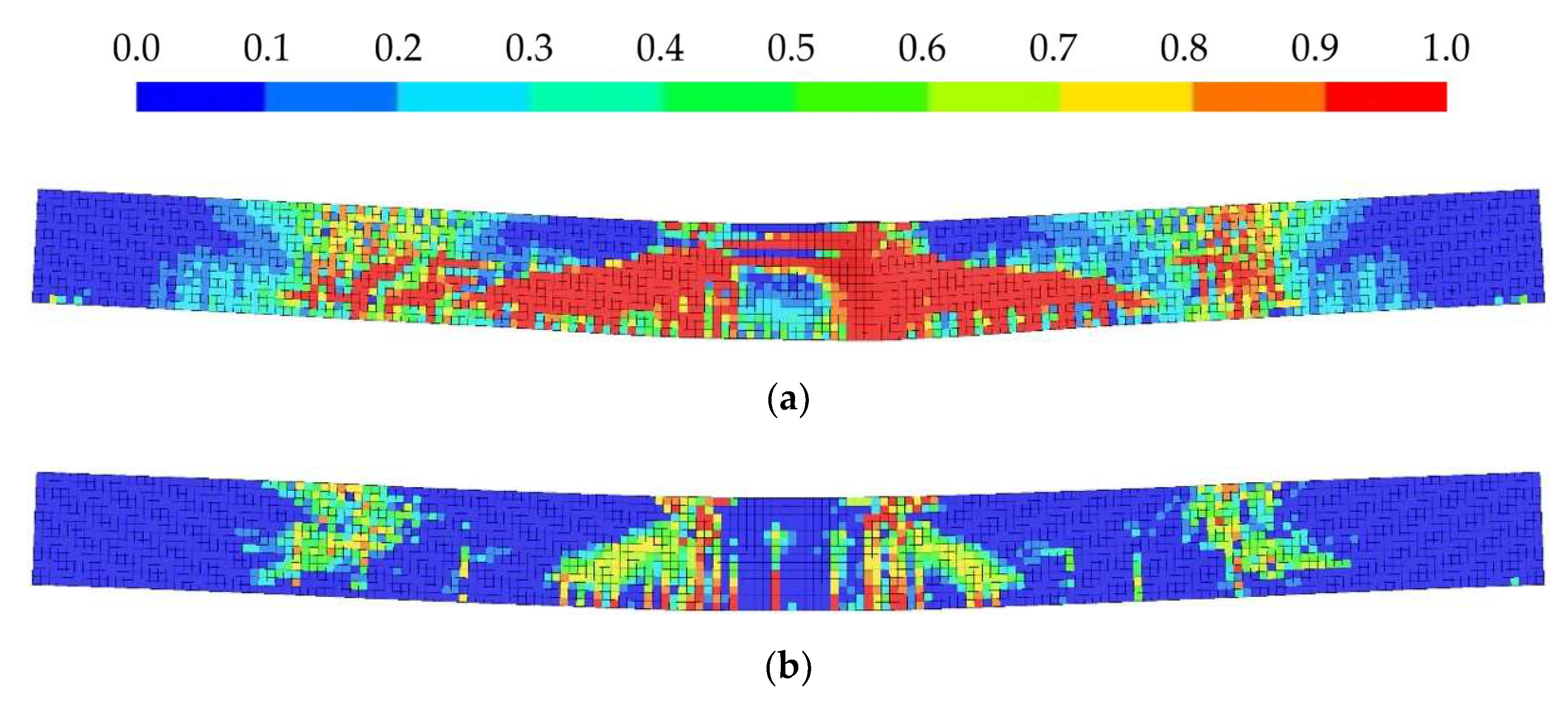
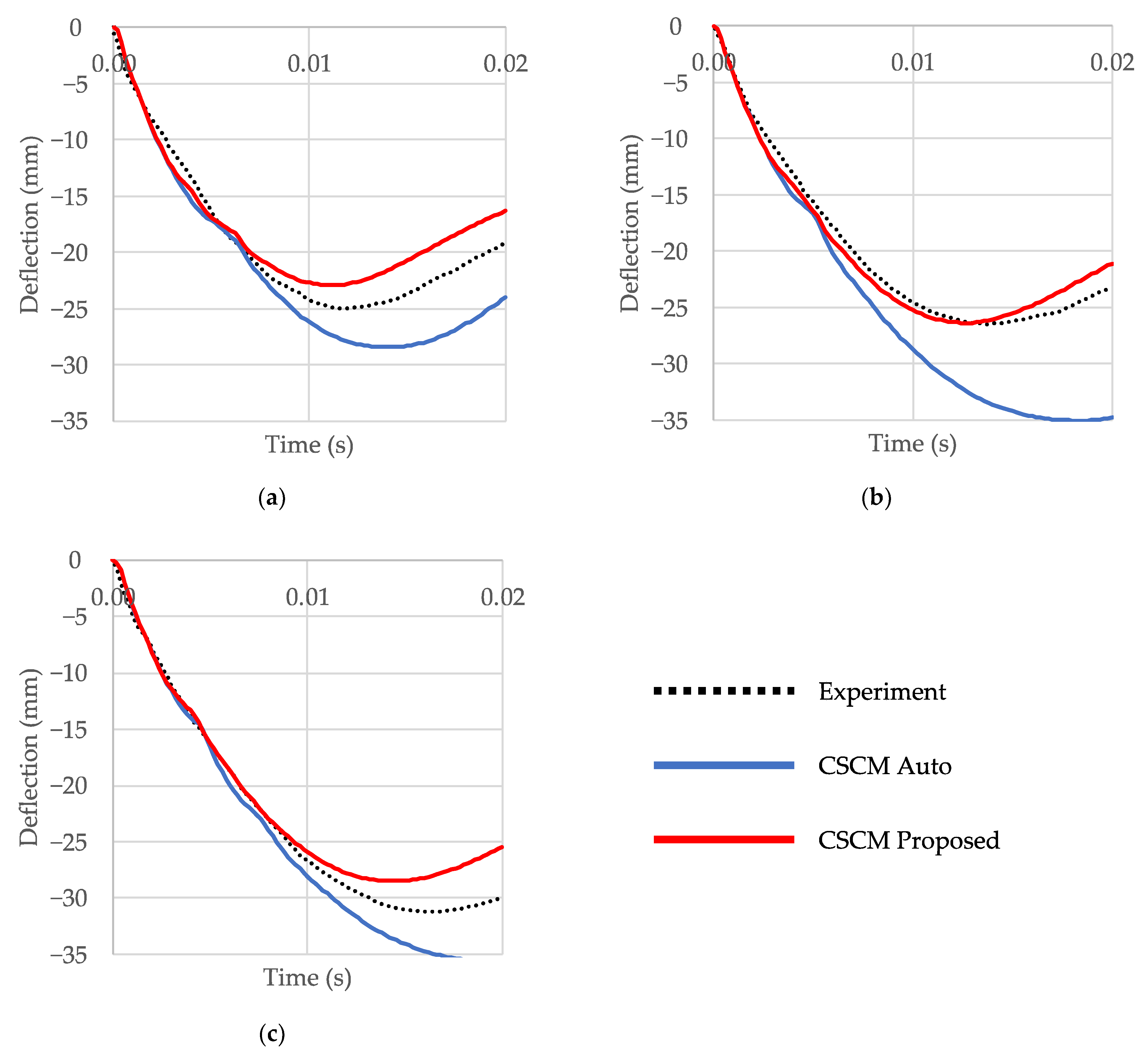
3.3. Impact on RC Beam
3.4. Two-Story Frame Progressive Collapse
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
Appendix A
Appendix A.1. Concrete Petameters from CEBFIP 1990 Analysis
Appendix A.2. Parameters for Compressive Meridian (TXC)

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| *MAT_CSCM Variable | Units | Equation |
|---|---|---|
| ALPHA | ||
| THETA | - | |
| LAMBDA | ||
| BETA |
Appendix A.3. Parameters for Shear Meridian (TOR)
| *MAT_CSCM Variable | Units | Equation |
|---|---|---|
| ALPHA1 | - | |
| THETA1 | ||
| LAMBDA1 | - | |
| BETA1 |
Appendix A.4. Parameters for Tensile Meridian (TXE)
| *MAT_CSCM Variable | Units | Equation |
|---|---|---|
| ALPHA2 | - | |
| THETA2 | ||
| LAMBDA2 | - | |
| BETA2 |
Appendix A.5. Cap Surface Parameters
| *MAT_CSCM Variable | Units | Equation |
|---|---|---|
| R | - | |
| X0 | ||
| W | - | |
| D1 | ||
| D2 |
Appendix A.6. Damage and Energy Parameters
| *MAT_CSCM Variable | Units | Equation |
|---|---|---|
| B | - | |
| D | - | |
| GFC | ||
| GFT | ||
| GFS | ||
| PWRC | - | |
| PWRT | - | |
| PMOD | - |
Appendix A.7. Strain Rate Parameters
| *MAT_CSCM Variable | Units | Equation |
|---|---|---|
| ETA0C | - | |
| NC | - | |
| ETA0T | - | |
| NT | - | |
| OVERC | - | |
| OVERT | - | |
| SRATE | - | |
| REPOW | - |
References
- Hallquist, J.O. LS-DYNA Theory Manual; Livermore Software Technology Corporation: Livermore, CA, USA, 2016. [Google Scholar]
- Feng, W.; Chen, B.; Yang, F.; Liu, F.; Li, L.; Jing, L.; Li, H. Numerical Study on Blast Responses of Rubberized Concrete Slabs Using the Karagozian and Case Concrete Model. J. Build. Eng. 2021, 33, 101610. [Google Scholar] [CrossRef]
- Winkelbauer, B.J. Phase I Evaluation of Selected Concrete Material Models in LS-DYNA. Master’s Thesis, University of Nebraska-Lincoln, Lincoln, NE, USA, December 2015. [Google Scholar]
- Magalhaes Pereira, L.F.; Weerheijm, J.; Sluys, L.J. Damage Prediction in a Concrete Bar Due to a Compression and Tension Pulse: A Comparison of the K&C, the CSCM and the RHT Material Models in LS-DYNA. In Proceedings of the 15th ISIEMS Conference, International Symposium on the Interaction of the Effects of Munitions with Structures, Potsdam, Germany, 17–20 September 2013. [Google Scholar]
- Wu, C.T.; Wu, Y.; Hu, W.; Ren, B.; Guo, Y.; Pan, X.; Lui, Z. LS-DYNA Concrete Constitutive Modeling and Impact Failure Analysis; Computational & Multiscale Mechanics Group, Livermore Software Technology, ANSYS: Livermore, CA, USA, 2018. [Google Scholar]
- Murray, Y.D. Users Manual for LS-DYNA Concrete Material Model 159; FHWA-HRT-05-062; United States Federal Highway Administration: Washington, DC, USA, May 2007. [Google Scholar]
- Murray, Y.D. Theory and Evaluation of Concrete Material Model 159. In 8th International LS-DYNA Users Conference; APTEK Inc.: Colorado Springs, CO, USA, 2004; pp. 25–36. [Google Scholar]
- DiMaggio, F.L.; Sandler, I.S. Material Model for Granular Soils. J. Eng. Mech. Div. 1971, 97, 935–950. [Google Scholar] [CrossRef]
- CEB-FIP. CEB-FIP Model Code 1990; Thomas Telford Services Ltd.: London, UK, 1993; ISBN 0-7277-1696-4. [Google Scholar]
- Saini, D.; Shafei, B. Concrete constitutive models for low velocity impact simulations. Int. J. Impact Eng. 2019, 132, 103329. [Google Scholar] [CrossRef]
- Wei, J.; Li, J.; Wu, C. An experimental and numerical study of reinforced conventional concrete and ultra-high performance concrete columns under lateral impact loads. Eng. Struct. 2019, 201, 109822. [Google Scholar] [CrossRef]
- Madurapperuma, M.A.K.M.; Niwa, K. Concrete Material Models in LS-DYNA for Impact Analysis of Reinforced Concrete Structures. Appl. Mech. Mater. 2014, 566, 173–178. [Google Scholar] [CrossRef]
- Dmitriev, A.; Lalin, V.; Novozhilov, Y.; Mikhalyuk, D. Simulation of Concrete Plate Perforation by Coupled Finite Element and Smooth Particle Hydrodynamics Methods. Constr. Unique Build. Struct. 2020, 92, 9207. [Google Scholar] [CrossRef]
- Kim, S.B.; Kim, H.W.; Yoo, Y.H. Penetration analysis of projectile with inclined concrete target. EPJ Web Conf. 2015, 94, 6–8. [Google Scholar] [CrossRef] [Green Version]
- Chung, C.; Lee, J.; Jung, R. Numerical simulations of missile impacts on reinforced concrete plates: IRIS-2010/2012 benchmark project. Nucl. Eng. Des. 2015, 295, 747–758. [Google Scholar] [CrossRef]
- Dmitriev, A.; Lalin, V.; Melnikov, A. Validation of Computational Procedures for the Progressive Collapse Analysis of Reinforced Concrete Structures. In Proceedings of the 2020 International Scientific Conference on Energy, Environmental and Construction Engineering, St. Petersburg, Russia, 19–20 November 2021; Volume 150, pp. 215–224. [Google Scholar] [CrossRef]
- Bermejo, M.; Santos, A.P.; Goicolea, J.M. Development of practical finite element models for collapse of reinforced concrete structures and experimental validation. Shock Vib. 2017, 2017, 4636381. [Google Scholar] [CrossRef] [Green Version]
- Pham, A.T.; Tan, K.H.; Yu, J. Numerical investigations on static and dynamic responses of reinforced concrete sub-assemblages under progressive collapse. Eng. Struct. 2017, 149, 2–20. [Google Scholar] [CrossRef]
- Yu, J.; Gan, Y.P.; Wu, J.; Wu, H. Effect of concrete masonry infill walls on progressive collapse performance of reinforced concrete infilled frames. Eng. Struct. 2019, 191, 179–193. [Google Scholar] [CrossRef]
- Yu, J.; Luo, L.; Li, Y. Numerical study of progressive collapse resistance of RC beam-slab substructures under perimeter column removal scenarios. Eng. Struct. 2018, 159, 14–27. [Google Scholar] [CrossRef]
- Saini, D.; Shafei, B. Performance of Concrete-Filled Steel Tube Bridge Columns Subjected to Vehicle Collision. J. Bridge Eng. 2019, 24, 4019074. [Google Scholar] [CrossRef]
- Auyeung, S.; Alipour, A.; Saini, D. Performance-based design of bridge piers under vehicle collision. Eng. Struct. 2019, 191, 752–765. [Google Scholar] [CrossRef]
- Murray, Y.D.; Abu-Odeh, A.Y.; Bligh, R.P. Evaluation of LS-DYNA Concrete Material Model 159; FHWA-HRT-05-063; United States Federal Highway Administration: Washington, DC, USA, May 2007. [Google Scholar]
- Castedo, R.; Santos, A.P.; Alañón, A.; Reifarth, C.; Chiquito, M.; López, L.M.; Martínez-Almajano, S.; Pérez-Caldentey, A. Numerical study and experimental tests on full-scale RC slabs under close-in explosions. Eng. Struct. 2021, 231, 111774. [Google Scholar] [CrossRef]
- Zhang, C.; Gholipour, G.; Mousavi, A.A. Nonlinear dynamic behavior of simply-supported RC beams subjected to combined impact-blast loading. Eng. Struct. 2019, 181, 124–142. [Google Scholar] [CrossRef]
- Gomathi, K.A.; Rajagopal, A.; Reddy, K.S.S.; Ramakrishna, B. Plasticity based material model for concrete subjected to dynamic loadings. Int. J. Impact Eng. 2020, 142, 103581. [Google Scholar] [CrossRef]
- Tai, Y.S.; Chu, T.L.; Hu, H.T.; Wu, J.Y. Dynamic response of a reinforced concrete slab subjected to air blast load. Theor. Appl. Fract. Mech. 2011, 56, 140–147. [Google Scholar] [CrossRef]
- Qian, K.; Weng, Y.H.; Li, B. Impact of two columns missing on dynamic response of RC flat slab structures. Eng. Struct. 2018, 177, 598–615. [Google Scholar] [CrossRef]
- Grunwald, C.; Khalil, A.A.; Schaufelberger, B.; Ricciardi, E.M.; Pellecchia, C.; De Iuliis, E.; Riedel, W. Reliability of collapse simulation—Comparing finite and applied element method at different levels. Eng. Struct. 2018, 176, 265–278. [Google Scholar] [CrossRef]
- Levi-Hevroni, D.; Kochavi, E.; Kofman, B.; Gruntman, S.; Sadot, O. Experimental and numerical investigation on the dynamic increase factor of tensile strength in concrete. Int. J. Impact Eng. 2018, 114, 93–104. [Google Scholar] [CrossRef]
- Adam, J.M.; Buitrago, M.; Bertolesi, E.; Sagaseta, J.; Moragues, J.J. Dynamic Performance of a Real-Scale Reinforced Concrete Building Test under a Corner-Column Failure Scenario. Eng. Struct. 2020, 210, 110414. [Google Scholar] [CrossRef]
- European Committee For Standardization(CEN). Eurocode 2: Design of Concrete Structures; EN 1992-1-1; European Committee for Standardization: Brussels, Belgium, 2004. [Google Scholar]
- Taerwe, L.; Matthys, S. Fib Model Code for Concrete Structures 2010; Wiley-VCH Verlag GmbH & Co. KGaA: Weinheim, Germany, 2013; ISBN 978-3-433-03061-5. [Google Scholar]
- Schwer, L.E.; Murray, Y.D. Continuous Surface Cap Model for Geomaterial Modeling: A New LS-DYNA Material Type. In Proceedings of the 7th International LSDYNA Users Conference, Dearborn, MI, USA, 19–21 May 2002; pp. 35–50. [Google Scholar]
- Jiang, H.; Zhao, J. Calibration of the continuous surface cap model for concrete. Finite Elem. Anal. Des. 2015, 97, 1–19. [Google Scholar] [CrossRef]
- Bedon, C.; Stochino, F.; Honfi, D. Special Issue on “Buildings and Structures under Extreme Loads II”. Appl. Sci. 2022, 12, 2660. [Google Scholar] [CrossRef]
- Gertsik, S.; Novozhilov, Y. Numerical simulation of a massive impactor falling onto a reinforced concrete beam. Probl. Strength Plast. 2020, 82, 5–15. [Google Scholar] [CrossRef]
- Gertsik, S.M.; Novozhilov, Y.V.; Mikhaluk, D.S. Numerical simulation of the dynamics of a reinforced concrete slab under an air shock wave. J. Appl. Mech. Tech. Phys. 2021, 62, 132–145. [Google Scholar] [CrossRef]
- Luccioni, B.; Aráoz, G.; Möller, O.; Signorelli, J.W.; Storti, M.A.; Rosario, A. Erosion Criteria for Frictional Materials under Blast Load. Mecánica Comput. 2011, 30, 1809–1831. [Google Scholar]
- Murray, Y.D. The CSCM Original Verification Model Set. Available online: https://ftp.lstc.com/anonymous/outgoing/support/FAQ_kw/concrete/mat159_examples.tar (accessed on 4 April 2022).
- International Atomic Energy Agency (IAEA). Safety Aspects of Nuclear Power Plants in Human Induced External Events: General Considerations; Safety Reports Series No. 86; International Atomic Energy Agency: Vienna, Austria, 2017. [Google Scholar]
- Dmitriev, A.N.; Lalin, V.V. Comparison of different procedures for progressive collapse analysis of rc flat slab structures under corner column loss scenario. Buildings 2021, 11, 405. [Google Scholar] [CrossRef]
- Chen, H. An Introduction to *CONSTRAINED_BEAM_IN_SOLID. FEA Inf. Eng. J. 2017, 6, 14–18. [Google Scholar]
- Moutoussamy, L.; Herve, G.; Barbier, F. Qualification of *Constrained_Lagrange_In_Solid command for steel/concrete interface modeling. In Proceedings of the 8th LS-DYNA European User Conference, Strasbourg, France, 23–24 May 2011. [Google Scholar]
- Dmitriev, A.; Novozhilov, Y.; Mikhalyuk, D.; Lalin, V. Calibration and validation of the Menetrey-Willam constitutive model for concrete. Constr. Unique Build. Struct. 2020, 88, 8804. [Google Scholar] [CrossRef]






| dmax (mm) | GF0 (N/mm) |
|---|---|
| 8 | 0.025 |
| 16 | 0.030 |
| 32 | 0.038 |
| Case Name | Drop Weight (kg) | Impact Velocity (m/s) |
|---|---|---|
| B | 31.75 | 7.3 |
| C | 47.86 | 6.0 |
| D | 63.93 | 5.2 |
| fc (MPa) | fc Overestimation (%) | ft Underestimation (%) | ||
|---|---|---|---|---|
| Auto Internal Calibration | Proposed External Calibration | Auto Internal Calibration | Proposed External Calibration | |
| 20–60 | +0.7–+23.0 | +1.5–+5.4 | +18.6–+56.2 | −2.8–+5.8 |
| 30–50 | +5.1–+23.0 | −0.5–+0.6 | +18.6–+56.2 | +0.9–+1.9 |
| fc (MPa) | GF Underestimation (%) | |
|---|---|---|
| Auto | Proposed | |
| 20–60 | +5.8–+31.8 | −2.3–+11.7 |
| 30–50 | +8.8–+20.9 | +6.8–0.0 |
| Case | Peak deflection value (mm) | Divergence from experiment (%) | |||
|---|---|---|---|---|---|
| Experiment | Auto | Proposed | Auto | Proposed | |
| B (31.75 kg, 7.3 m/s) | −24.94 | −28.43 | −22.94 | −14% | 8% |
| C (47.86 kg, 6.0 m/s) | −26.47 | −35.04 | −26.36 | −32% | 0% |
| D (63.93 kg, 5.2 m/s) | −31.25 | −35.60 | −28.50 | −14% | 9% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Novozhilov, Y.V.; Dmitriev, A.N.; Mikhaluk, D.S. Precise Calibration of the Continuous Surface Cap Model for Concrete Simulation. Buildings 2022, 12, 636. https://doi.org/10.3390/buildings12050636
Novozhilov YV, Dmitriev AN, Mikhaluk DS. Precise Calibration of the Continuous Surface Cap Model for Concrete Simulation. Buildings. 2022; 12(5):636. https://doi.org/10.3390/buildings12050636
Chicago/Turabian StyleNovozhilov, Yury Vladislavovich, Andrey Nikolaevich Dmitriev, and Dmitry Sergeevich Mikhaluk. 2022. "Precise Calibration of the Continuous Surface Cap Model for Concrete Simulation" Buildings 12, no. 5: 636. https://doi.org/10.3390/buildings12050636
APA StyleNovozhilov, Y. V., Dmitriev, A. N., & Mikhaluk, D. S. (2022). Precise Calibration of the Continuous Surface Cap Model for Concrete Simulation. Buildings, 12(5), 636. https://doi.org/10.3390/buildings12050636