1. Introduction
Bridge dynamic deflection is one of the most important indicators to reflect bridge structural abnormality, including the quality, operating state, and stiffness, and further provide obvious feedback on the overall deformation of bridges [
1]. Compared with the traditional contact transducers, such as piezoelectric accelerometers, optical fiber sensors, strain gauges, and inductance meters, ground-based synthetic aperture radar (GB-SAR), a non-contact measurement technology, can perform all-weather, large-scale, and long-distance dynamic deflection measurement for the monitored bridges [
2,
3,
4]. By treating the reflection points as virtual sensors, the traditional point sensors can be reduced or even eliminated [
4]. Accurate comparison has been carried out between GB-SAR and accelerometers on various large bridges, which showed that the accuracy of GB-SAR was better than 0.1 mm [
5,
6]. With the advantages of a wide frequency response range, high sensitivity of the displacement and easy installation, GB-SAR has been widely applied in non-contact dynamic deflection monitoring of various bridges. Structural modal parameters are important indices to reflect the dynamic characteristics of the monitored bridge, which can be identified from the corresponding dynamic deflection. It is of great significance to understand the current characteristics of the monitored bridges with the determined structural modal parameters, which can provide a basis to perform state evaluation and abnormal monitoring of the bridges [
7,
8].
The stochastic subspace identification (SSI) method, an extension of the subspace state space system identification method, has been widely used in operational modal analysis (OMA) [
8,
9]. As the latest development of the time domain identification method, the SSI method can directly extract structural modal parameters from the output response signal of the structure under environmental excitation. With the characteristics of robustness, high identification accuracy, and stability, the SSI method can be used to accurately identify the frequency and damping ratio of the response signal. It has been widely used to extract modal parameters from the dynamic deflection of the monitored bridges [
10,
11,
12,
13,
14,
15,
16,
17,
18]. Data-driven stochastic subspace identification (Data-SSI) and covariance-driven stochastic subspace identification (COV-SSI) are the two favorite modal parameter identification techniques [
8,
11]. They are all derived from the different weight matrices before the singular value decomposition (SVD). Compared with the COV-SSI method, the Data-SSI method has the ability to process a large amount of input and output data at the same time, which can ensure higher stability and accuracy. Furthermore, for the Data-SSI method, the state space matrices can be identified with robust numerical methods, such as SVD, least squares, and quadrature rectangle (QR) decomposition. Therefore, Data-SSI has been validated as one of the most robust and accurate identification methods to extract more effective information in many experiments and engineering applications [
6]. George et al. proved that the Data-SSI method is accurate and effective to identify the structural abnormality in a structural abnormal monitoring experiment for simple structures with few components [
9]. Dilena and Morassi performed a dynamic deflection measurement experiment for a cracked steel beam, which had a high accuracy in obtaining the crack position using Data-SSI method [
7]. Boonyapinyo used the Data-SSI method to extract the modal parameters of a bridge model excited with the wind, and the results showed that the bridge coupling aerodynamic derivative extracted by the Data-SSI method was closer to the true value than the COV-SSI method [
19].
However, the accuracy of Data-SSI is limited by the noise existing in monitored data. During the dynamic deflection acquisition of the monitored bridges using GB-SAR, noise and abnormal data due to environmental incentives will inevitably be generated. Moreover, modal omissions and false modalities may be caused for mode estimation using the singular value average method, due to empirical judgment for dividing the singular value inflection point of the projection matrix. In addition, the steady-state graph modal estimation method is still based on empirical judgments; it has a complicated structure and requires a large amount of calculation. Ubertini proposed a Data-SSI method to filter the error modalities for automatic modal identification of two field bridges. The results indicated that the Data-SSI method used is effective for natural frequency identification [
20]. Hoofar et al. proposed an improved Data-SSI with a weight matrix to perform structural health monitoring and modal parameter identification for Alamosa Canyon Bridge; the experimental results showed that the improved Data-SSI has a high robustness [
21]. However, as the Hankel matrix is directly composed of dynamic response signals, the number of columns of the Hankel matrix tends to infinity, which requires a large amount of memory, theoretically. Moreover, QR-decomposition and SVD decomposition operations increase the computational burden in the identification process greatly.
For the bridge dynamic deflection value collected by GB-SAR, it has an important impact on the collected data of the noise generated by the environmental excitation. The traditional Data-SSI method not only has a low calculation efficiency, but also contains ill-conditioned column vectors during the process of generating the Hankel matrix. They easily produce false modals and reduce the accuracy of the results. Therefore, to efficiently obtain the accurate structural modal parameters of the monitored bridge based on the dynamic deflection collected by GB-SAR, in this study, an improved Data-SSI method with autocorrelation matrix modal order estimation is proposed. In order to reduce the influence of noise and abnormal data for the dynamic deflection of the monitored bridge obtained by GB-SAR, boxplot data filtering is used to screen out the error points to generate the Hankel matrix. To reduce the ill-conditioned vectors in the column vectors of the Hankel matrix, the Hankel matrix compression method is presented to improve calculation efficiency. To reduce the generation of false modes and improve the calculation efficiency, an exact modal order (EMO) estimation algorithm based on the autocorrelation matrix is adopted.
2. Methodology
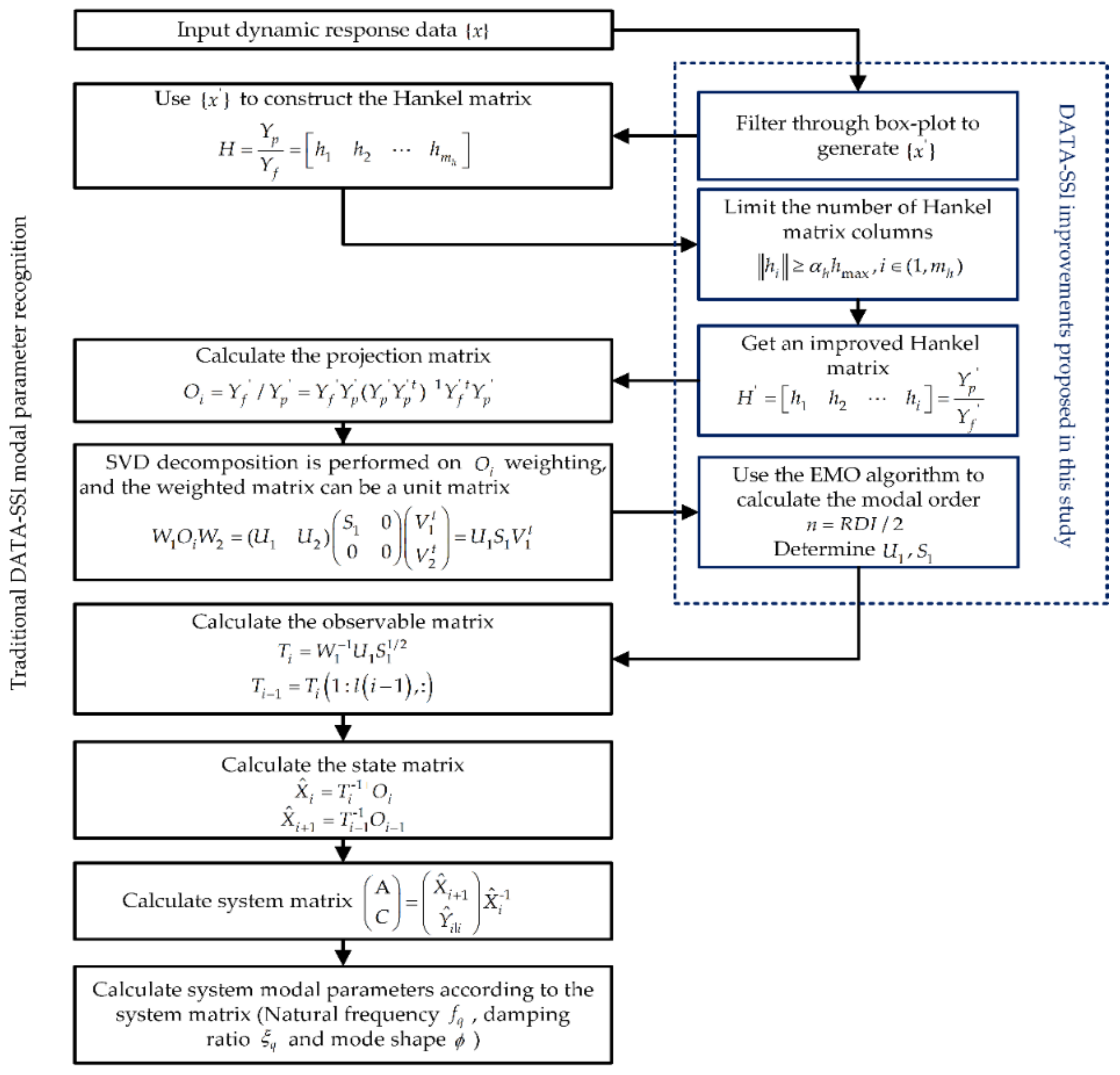
The entire workflow of the improved Data-SSI method is shown in
Figure 1, which can be used to extract the accurate structural modal parameters of the bridges based on the dynamic deflection acquired by GB-SAR. It includes the following three key steps: (1) boxplot data filtering is adopted to reduce the effects of noise and abnormal data to generate the Hankel matrix, (2) the Hankel matrix compression method is presented to reduce the ill-conditioned vectors in the column vectors of the Hankel matrix, which can improve calculation efficiency, and (3) an EMO estimation algorithm based on the autocorrelation matrix is adopted to reduce the generation of false modes and improve the calculation efficiency.
More detailed Data-SSI algorithm principles and processes can be found in [
10,
11]. This article will not discuss them further due to space limitations.
2.1. Boxplot Data Filtering
As a basic tool for visualizing the arrangement and statistical characteristics of data, a boxplot can provide univariate information for multivariate display [
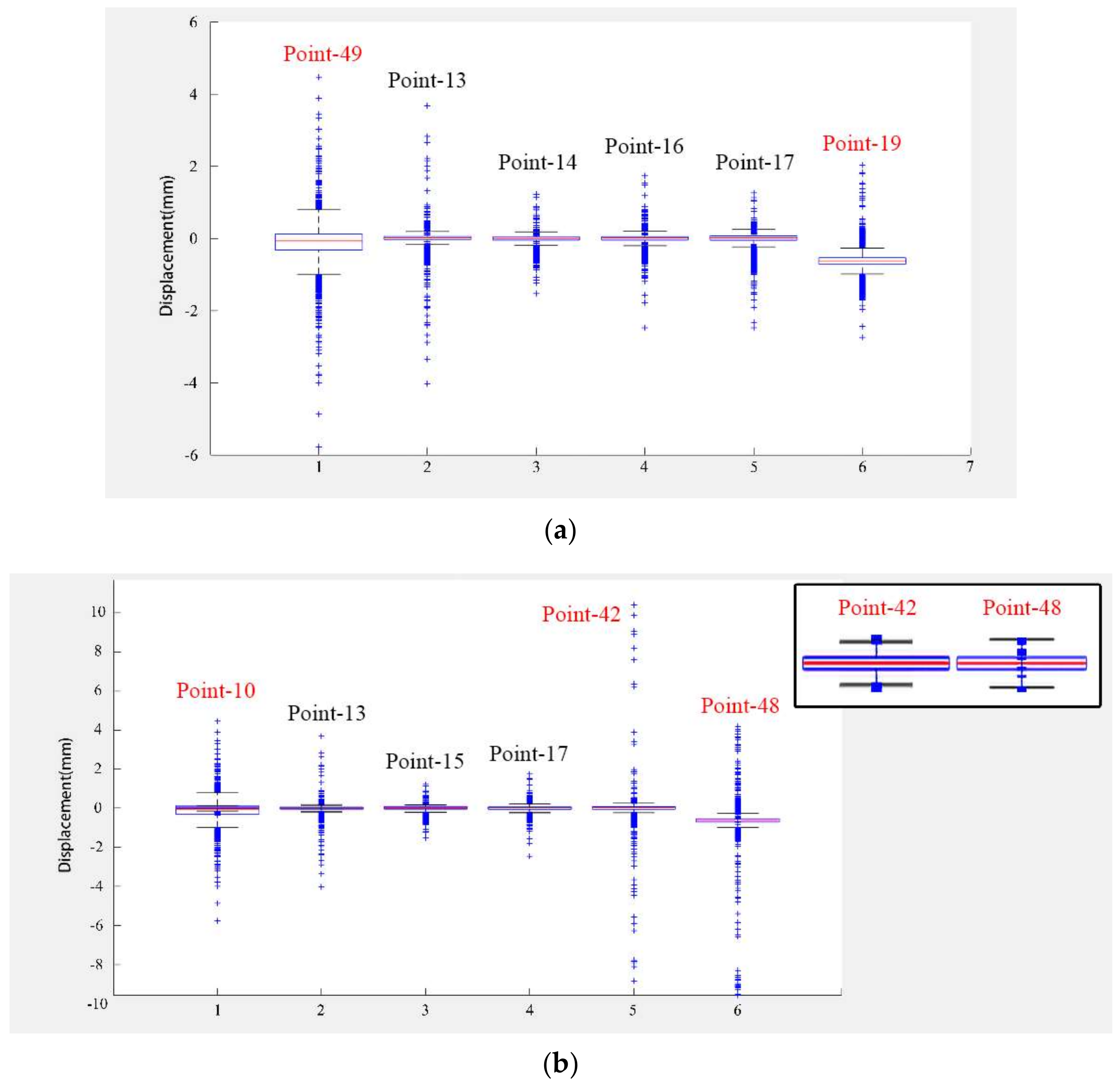
22]. The noise and abnormal data often are produced to pollute the obtained dynamic deflection, which are much larger (or smaller) than the vibration amplitude of the bridge itself. Therefore, in this study, boxplot filtering is performed to remove these abnormal data.
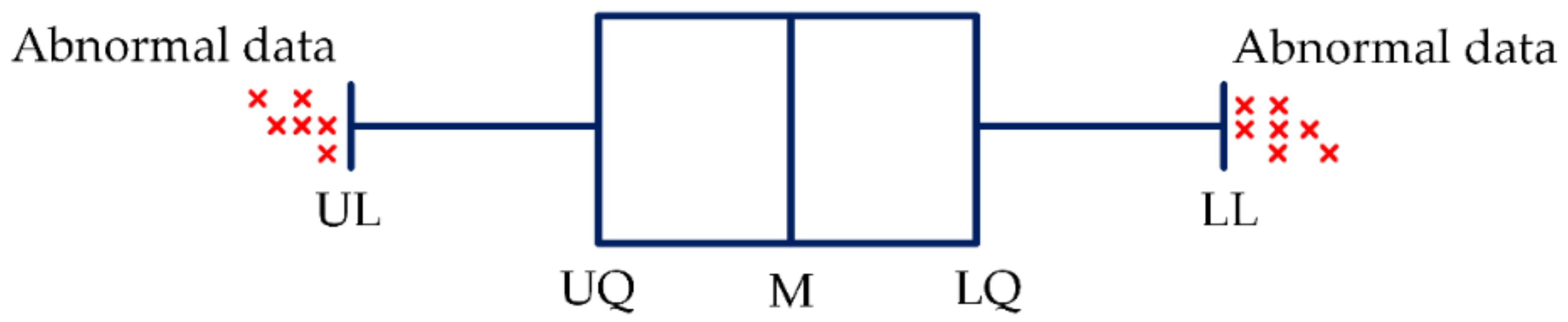
A schematic diagram of the working principle of boxplot filtering is shown in
Figure 2. For a set of original signals, it needs to calculate 5 important values to build a box-plot model, including the median
, upper quartile
, lower quartile
, upper limit
, and lower limit
. In this study, the dynamic deflection is sorted in descending order in the boxplot. Therefore,
,
, and
can be easily found individually.
and
are obtained by the following equations:
For the coefficient
in Equations (1) and (2), Frigge et al. have explored
in depth and conducted experiments with a large number of small-to-medium Gaussian samples [
23]. The experiment mainly discusses the effect of
being 1, 1.5, 2, and 3 on the removal efficiency of data outliers under different sample sizes. The results show that when
, the outer proportion of each sample is about 25%, which is more suitable for removing outliers. Although the values of
k and
n (sample size) both affect the outlier removal rate of the boxplot,
is suitable and works well for any data size [
23].
The skewness and distribution of the data can be estimated according to the positions of , , and . Potential outliers in the input dataset can be calculated and removed directly by filtering the boxplot data. During the calculation of statistical data, due to potential outliers being considered, the boxplot has the ability to identify and resist the outliers in the data.
2.2. Hankel Matrix Compression
For the traditional Data-SSI method, the Hankel matrix is mainly constructed from the output data of structural dynamic response under environmental excitation [
13]. The purpose of Hankel matrix construction is to obtain column subspace through projection. However, if some column vectors in the matrix have some small values, the subspace may lead to low-resolution projections, which will affect the identification results. In addition, theoretically, the number of columns of the Hankel matrix tends to infinity, which undoubtedly increases the computational pressure and memory consumption of the computer [
24,
25]. In this study, the “ill-conditioned” column vectors can be regarded as column vectors with lower specifications, which not only consumes computing memory, but may also cause invalid matrix projection. Therefore, it can compress the Hankel matrix by eliminating the “ill-conditioned” column vectors in the matrix.
Denote the denoised signal
using boxplot filtering, and construct the Hankel matrix with Equation (4).
where
is the constructed Hankel matrix and
is the row space representing the “past” composed by the upper half of the matrix.
is the row space of representing the “future” composed by the lower half of the matrix.
is the row and
is the column of matrix
.
The choice of parameter
depends on various factors related to the type of structure to be identified, including the length
of the input signal and the sampling frequency
. The choice of
is related to the lowest frequency
of the considered structural system. Assuming that there are
or more cycles of the lowest frequency
within the range of signal length
, then:
Since it contains at least one cycle,
can be expressed as:
Although a larger value of can make a larger time window to ensure the algorithm is more stable, too large a value of will lead to a decrease in computational efficiency. Therefore, to extract enough information from the observable range space, the number of rows of the “future” output matrix is relatively large. According to Equation (6), the minimum value of can be determined through a complete minimum frequency cycle, but the value of in different situations needs to be judged empirically.
The Hankel matrix can be divided into
column vectors according to each column, and further calculate the norm of each column vector. Define
as the largest norm. The “ill-conditioned” column vector with too low values can be deleted to limit the number of matrix column vectors using Equation (8).
where
represents any
i-th column vector in the Hankel matrix.
represents the compression ratio of the matrix between the range of
and
represents the largest column vector in the Hankel matrix.
represents the number of columns of the Hankel matrix.
2.3. Autocorrelation Matrix EMO Estimation Algorithm
For the EMO method, it is basically flat for the white noise power spectral density curve [
26]. Since the power spectral density of the input signal can be represented with the eigenvalues of the autocorrelation matrix
, the connection point between the signal and the noise subspace will change significantly. This kind of change cannot be directly identified because it is impossible to define a threshold for the changed signal and the corresponding signal-to-noise ratio (SNR). Therefore, the relative difference
of continuous eigenvalues can be used to enhance the discrimination between the noise subspace and signal.
where
is the
i-th eigenvalue and the diagonal matrix of eigenvalues is sorted in descending order.
is the number of eigenvalues and we define
RDI as the row number sequence
of the
.
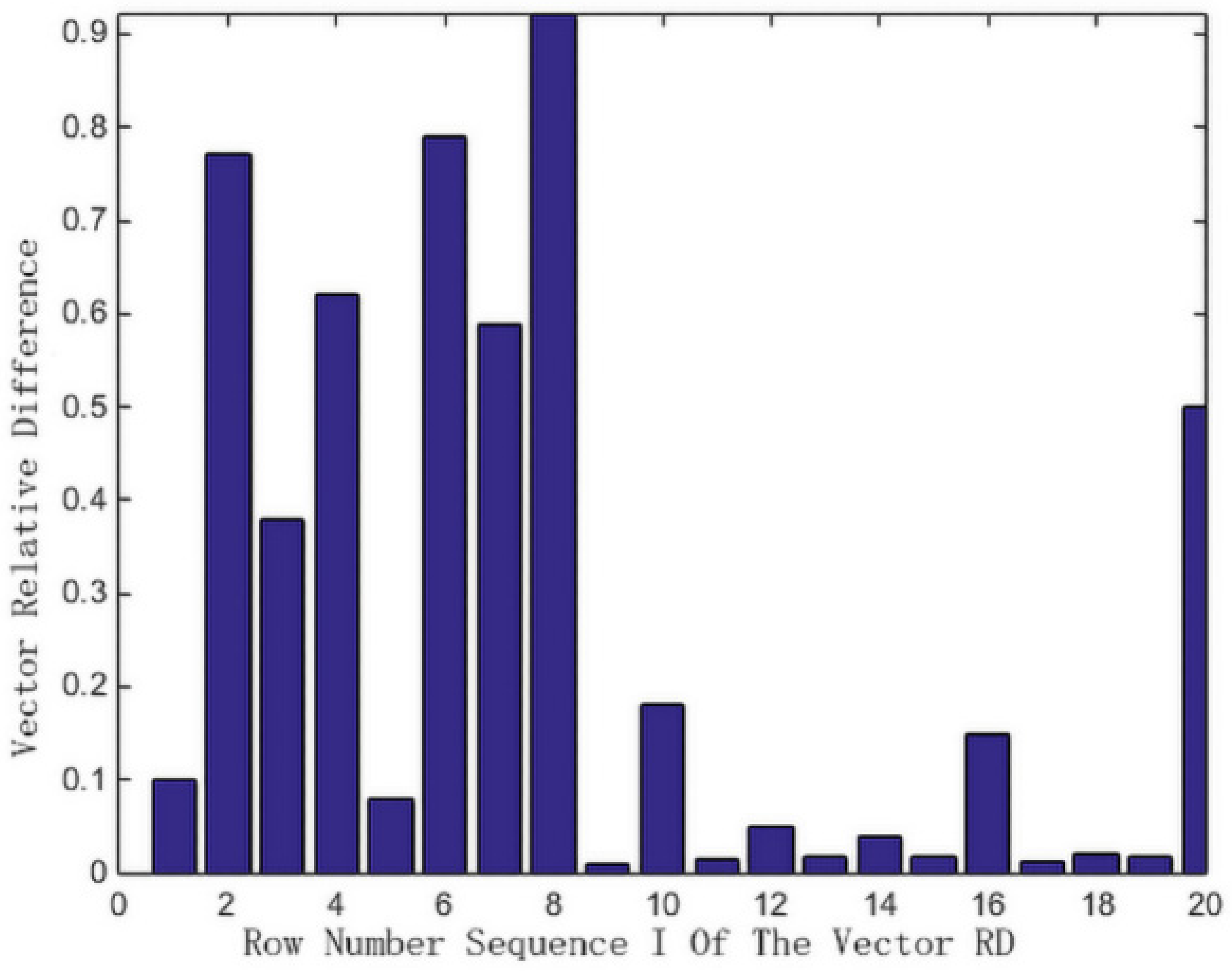
As shown in
Figure 3, the peak of the relationship between
RD and
RDI is the potential demarcation point between the signal and noise subspace. The two consecutive eigenvalues of a special complex frequency component pair are almost equal, so the value of the odd position in the
RD diagram is close to zero. Under normal circumstances, the appropriate mode order can be selected according to the
RDI corresponding to the first two peaks, but when the amplitude of the harmonic component changes greatly, the selection range is extended to the five peaks to make the result more reliable.
The largest
RDI is selected as the preliminary estimation of the modal, and the selected initial value is restricted to guarantee the signal component belonging to the signal subspace. The verification conditions are given as:
where the highest
RDI value
is the initial value of the mode order.
is the sensitivity factor in the range 2–5 to determine the sensitivity of the estimated value. On the one hand, the lower the value of
, the higher the sensitivity of the estimation algorithm, which can cause overestimation, so that it can identify the small harmonic components. On the other hand, if the value of
is high, it is likely to miss some very small order of magnitude components, leading to underestimation of the modal order. However, as for the second point, due to the low amplitude of the missing component, this has no great effect on signal reconstruction. If the algorithm fails to verify, the second highest value in the remaining peak value is used as the estimated value, and the condition judgment is performed again.
The main steps of the proposed EMO estimation algorithm are as follows:
Construct order Hankel matrix
of order based on signal
,
Construct autocorrelation matrix
,
where
is the Hankel matrix of order
,
is the length of the signal
, and
represents the Hermitian transpose of the matrix
;
Carry out eigenvalue decomposition on and make the eigenvalue in descending order;
Calculate RD of continuous eigenvalues in descending order according to Equation (9) and draw a histogram of RD and the corresponding eigenvalue row number RDI;
Select the maximum value of RDI corresponding to five peaks as the initial value of the modal order estimation;
According to Equation (10), determine whether the spectral components belong to the signal subspace. If the initial modal order value satisfies the verification condition, modal order is RDI/2. Otherwise, select the next highest RDI as the new value of modal order estimation, execute step 4 in sequence until the selected RDI satisfies the verification condition.
Each mode of
can be represented by using two main eigenvalues [
27]. Therefore, the dominant eigenvalue will be twice the value of the modal order in the signal. Compared with the main eigenvalues, the remaining eigenvalues of
are very small for the noise subspace. When the value of
is twice that of the modal order, the value of
RDI will rise rapidly. The reason is that
is a major eigenvalue belonging to signal subspace, and it is also quite low due to belonging to the noise subspace. After
to
, the average value of consecutive eigenvalues is also much smaller than
. In the EMO algorithm, this logic is used to accurately estimate the modal order.
5. Conclusions
With the advantages of robustness, numerical stability, and high identification accuracy, the Data-SSI method has been successfully applied to modal parameter extraction of various civil engineering structures under operating conditions. To improve the computational efficiency and accuracy of the Data-SSI method for bridge modal parameter estimation using GB-SAR, an improved Data-SSI with autocorrelation matrix modal order estimation was proposed in this study. The results presented in this study clearly highlight the following.
Compared with the Hankel matrix constructed directly from the original data, a box-plot filter can be used to construct a more stable Hankel matrix to improve the accuracy of the bridge dynamic deflection. The results indicate that the boxplot has a good ability to reduce the influence of the environmental noise and abnormal data.
The small ill-conditioned column vectors can be filtered and deleted in the Hankel matrix using the improved Data-SSI method. Therefore, as the number of columns of the Hankel matrix is reduced, it not only speeds up the generation of the Hankel matrix, but also produces fewer projection errors.
The maximum value of RDI is adopted to judge the modal order after SVD decomposition. The results of simulation and field experiments show that it has a stronger anti-noise performance and a more competitive advantage in computational efficiency than the traditional Data-SSI method.
After the natural frequency and damping ratio of the structure are accurately identified, the operating state of the bridge can be further obtained and safety assessment can be carried out by means of finite element analysis or other methods.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}