
High-Rise Building Construction Progress Measurement from Top View Based on Component Detection


Abstract
1. Introduction
- Identify the auxiliary objects (formwork and reinforcement), not the completed concrete elements, according to the actual situation;
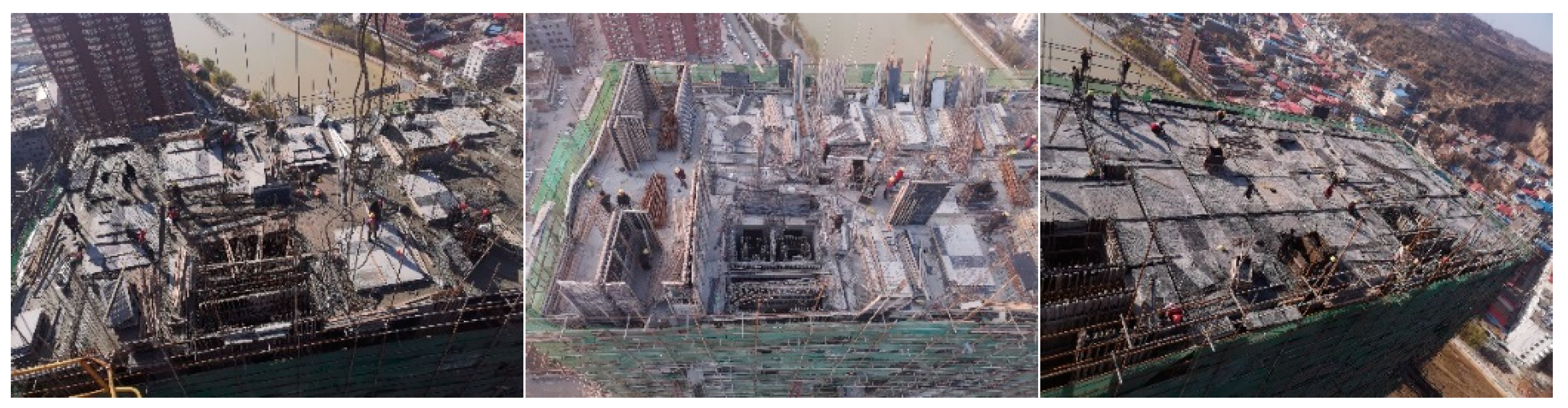
- Using only the top view to measure construction progress, as monitoring from the side is not practical for high-rise buildings;
- The reliability of the results is improved by using rough registration to locate the target detection results.
- The construction of the high-rise building is carried out by pouring concrete on site, and the concrete components are wrapped by formwork;
- The latest construction progress cannot be collected from the ground or sides due to the obstruction of the protective net;
- The monitoring object is the latest construction progress of the structure, not the indoor construction progress.
2. Related Work
2.1. Building Component Detection
2.2. Construction Progress Measurement
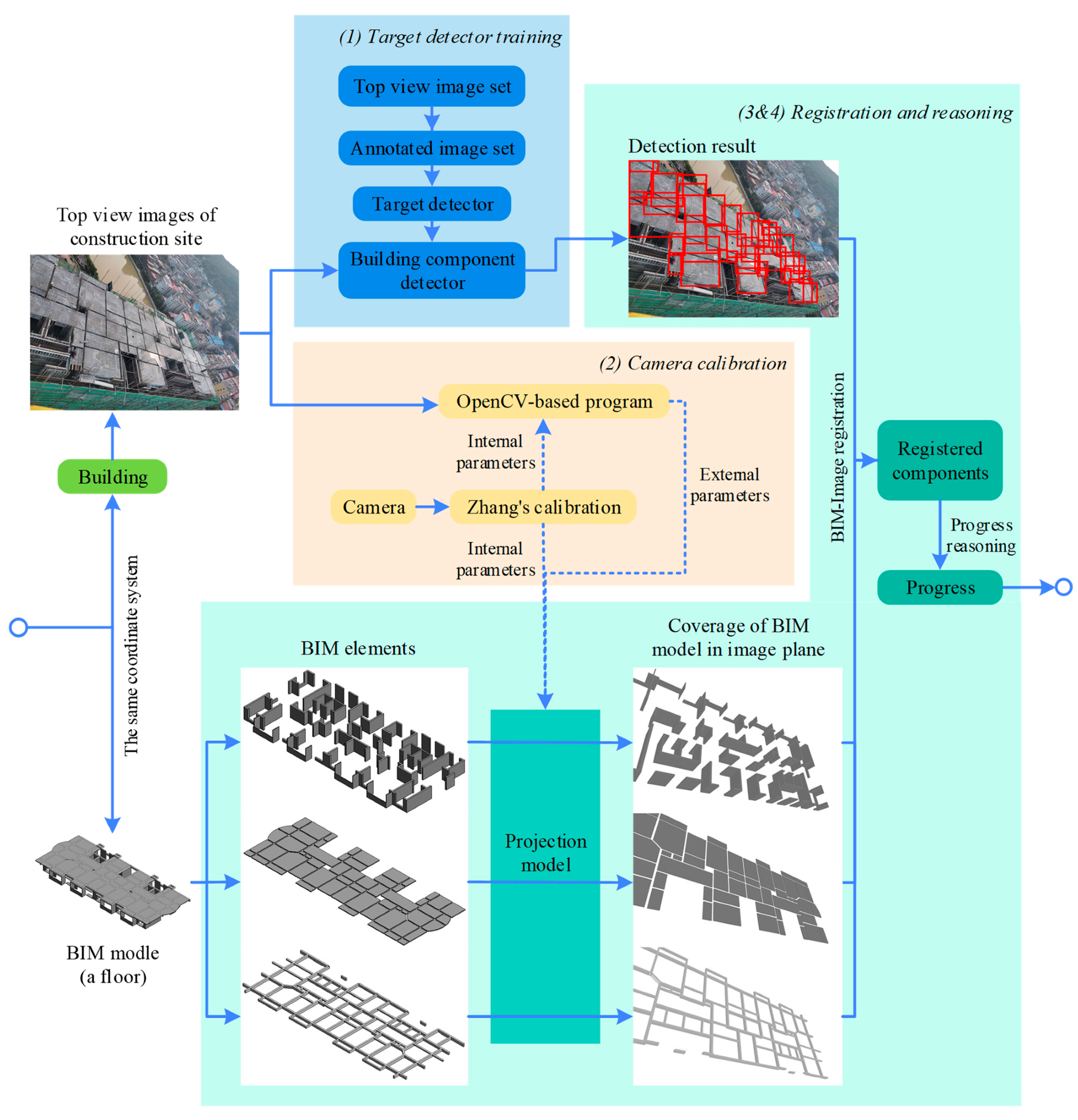
3. Methodology
- Train building component detector in advance, and identify the building components from the top view;
- Establish the mapping relationship between the 3D world (BIM model) and the imaging plane through the camera calibration;
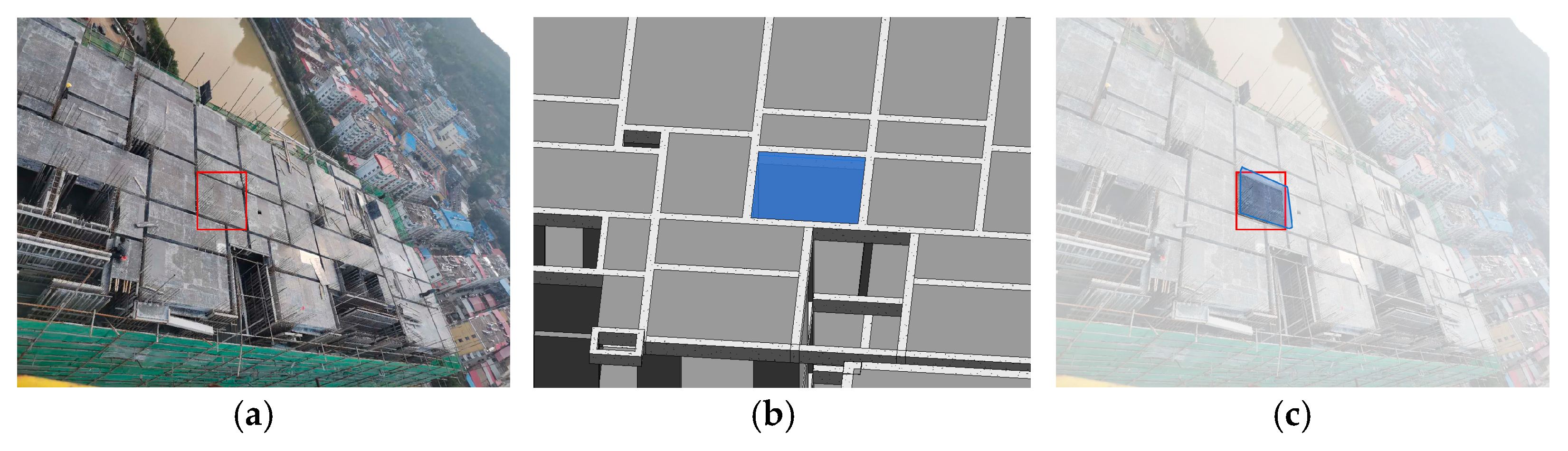
- Register the detected components with BIM elements by comparing the projection position of BIM elements in the imaging plane;
- Infer the construction progress with the number of detected and registered components.
3.1. Target Detector Training
3.1.1. Objects to Be Identified
3.1.2. Data Acquisition and Annotation
3.1.3. Detector Selection and Training
3.2. Camera Calibration
- Extract Scale Invariant Feature Transform (SIFT) points from images [64];
- Match features using k-nearest neighbor (KNN) classification algorithm [65];
- Calculate the essential matrix between two images by “findEssentialMat” function;
- Calculate the external parameter matrices by “solvePnPRansac” function.
3.3. Registration and Reasoning
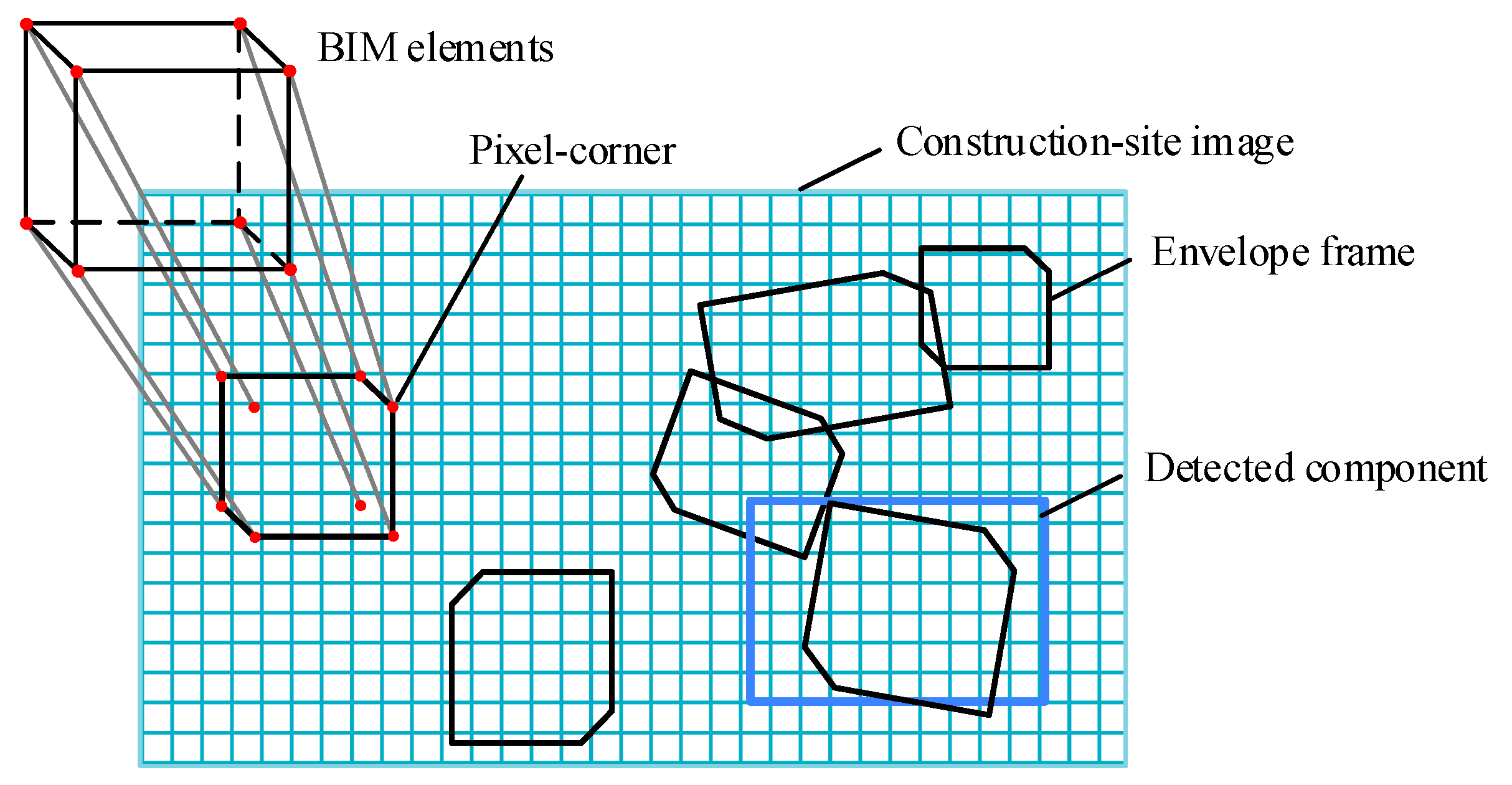
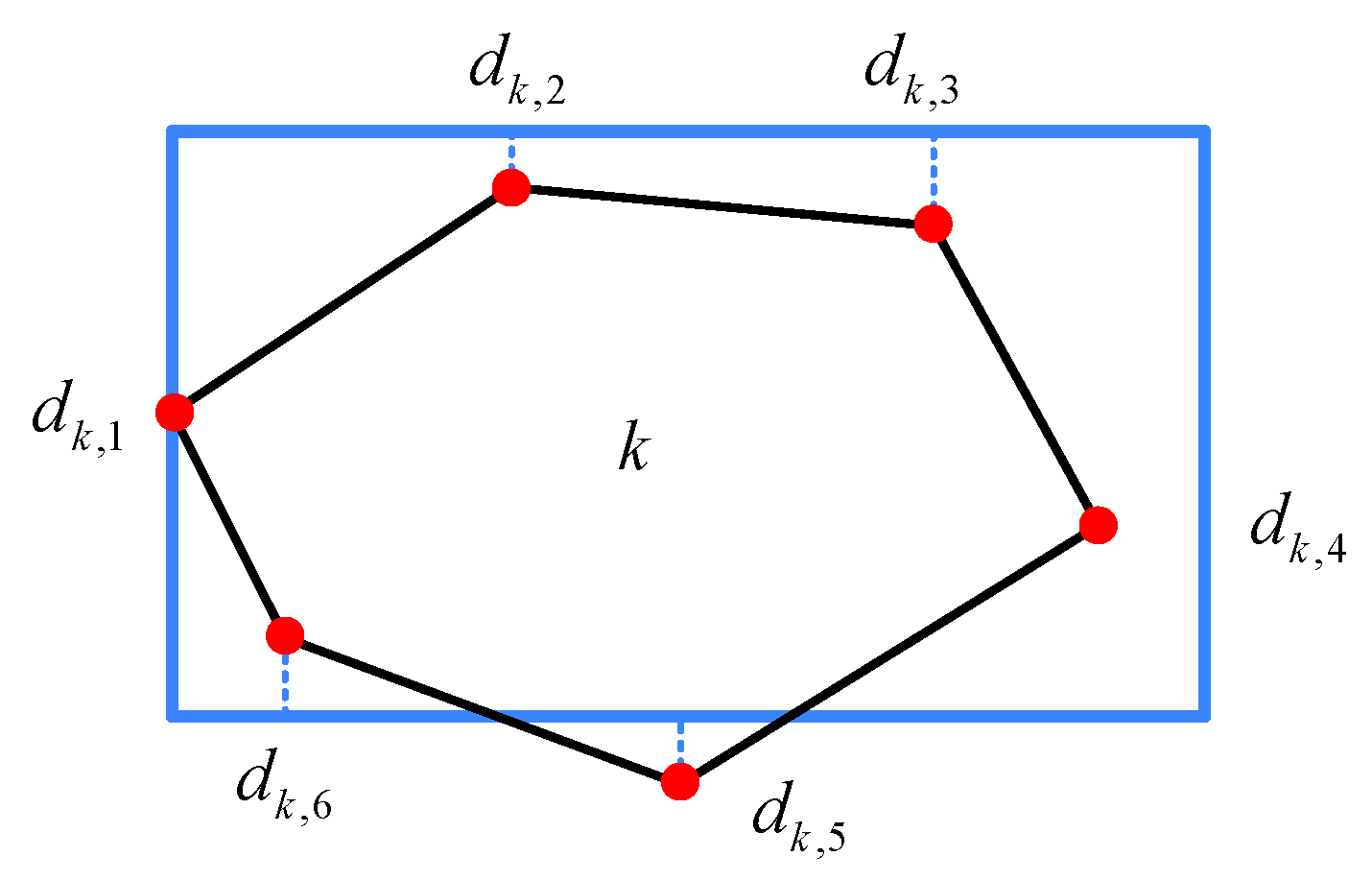
3.3.1. BIM-to-Image Rough Registration
- The envelope frames of components that do not belong to the construction layer;
- The envelope frames which do not overlap with the rectangular box;
- The envelope frames with horizontal and vertical dimensions greater than two times or less than 0.5 times the size of the rectangular box;
- The envelope frames whose type are inconsistent with the rectangular box.
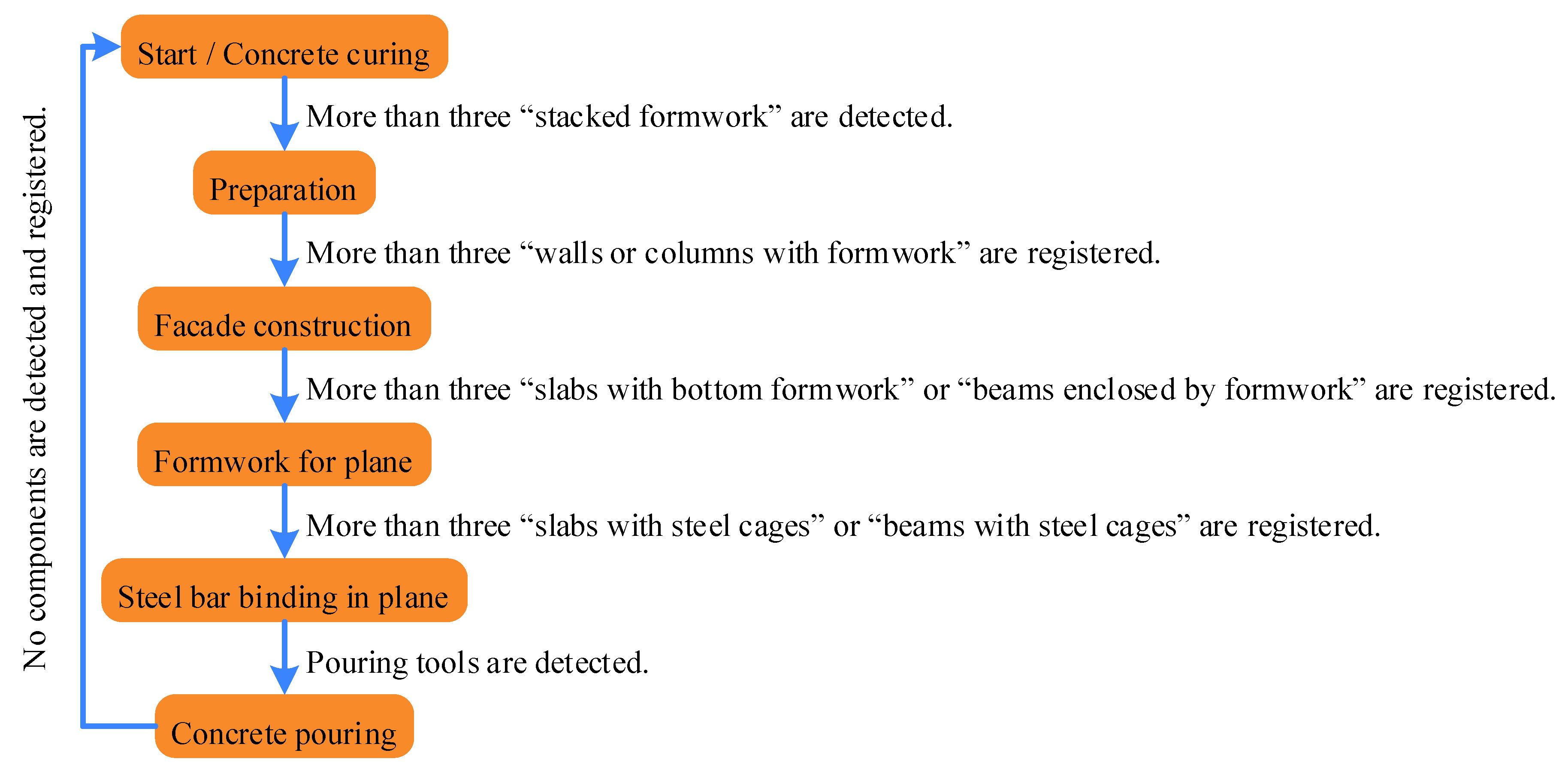
3.3.2. Progress Reasoning
4. Experiment and Analysis
4.1. Experimental Data Collection and Setup
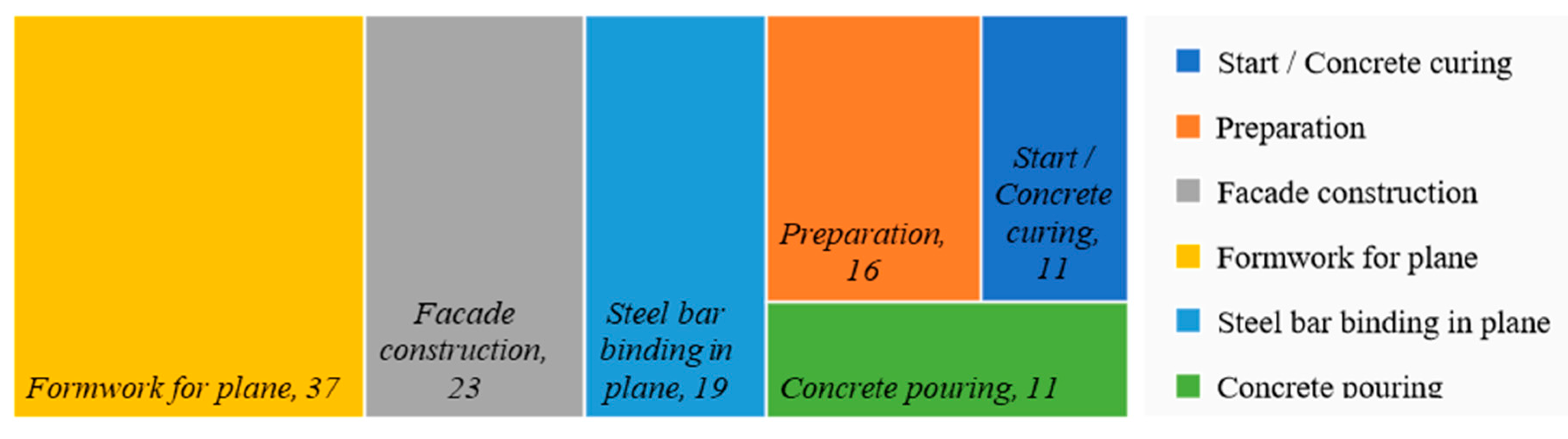
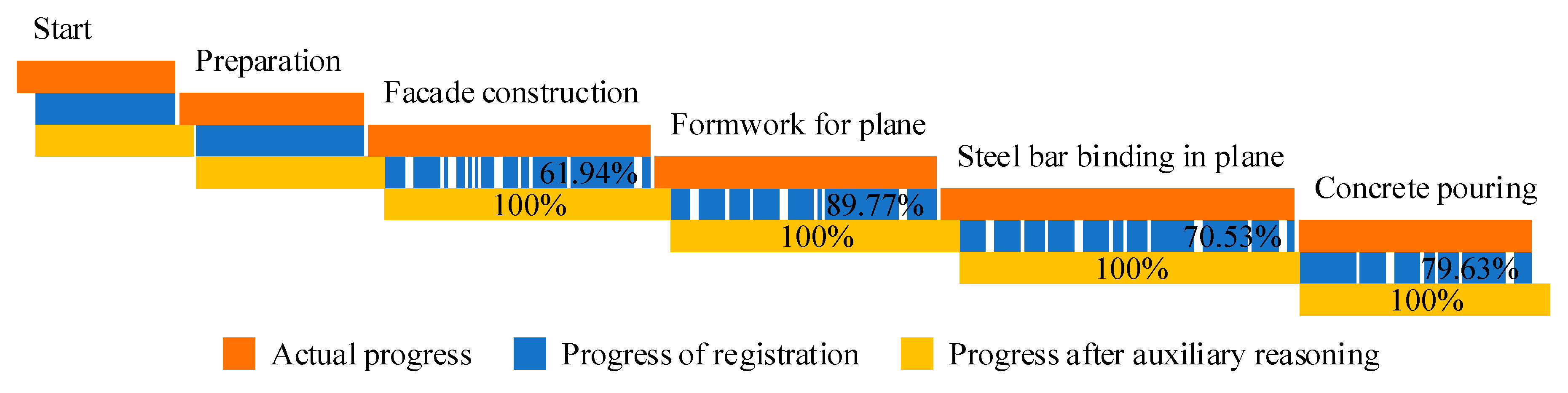
4.2. Results and Analysis
4.3. Analysis of Error Cases
5. Discussion
5.1. Why Target Detection?
- Target detection can identify component categories with texture and context information in the image. In construction, many components are made of concrete, which makes it difficult to tell whether the components are beams, slabs, columns, or walls only according to the material. Compared with the method of inferring component types by measuring the space occupied by the point cloud, object detection can make full use of the texture information of the material in the image. Furthermore, compared with the method of identifying material in the back-projected area, target detection can make full use of the context information in the image;
- Target detection identifies the actual components rather than the planned ones in the schedule. When using the back projection method, it is unrealistic to project all the components into the image, so it is necessary to determine which components are projected each time, and which is the root of the problem. The general construction progress can be planned by referring to historical experience, however the specific implementation of these plans in practice is affected by many factors. When a few components are projected, there is uncertainty as to whether these components will be built first and while many components are projected, the occlusion relationship among these components cannot be determined. Therefore, the number of projected components and the order of schedule implementation will impact the effect of schedule tracking. In contrast to this method, target detection directly identifies the existing components from the image without the planned information, which is more flexible;
- Target detection can be extended to the identification of other objects on the construction site. In this paper, target detection is used to identify formwork, steel cages, pouring tools and so on, which is necessary for progress reasoning in this paper. In future research, more components, tools, materials, machinery and personnel can be identified to enrich the collected construction progress details or expand other management functions based on this technology.
5.2. The Role of Rough Registration
5.3. Coherence of Images
5.4. Advantages
- Top view: The high-rise building is constructed in layers, and the components of each layer overlap less in the vertical direction, although they overlap seriously in the horizontal direction. With the help of a tower crane, the construction site can be photographed clearly with less shielding;
- Auxiliaries rather than concrete members: The material used to infer construction progress in this paper is the auxiliary of building components. This includes a formwork, support, reinforcement cage and pouring tool. Compared with the method of identifying concrete components, this method is more suitable for the actual construction site, the reason being that in the construction site of a cast-in-place concrete structure it is these auxiliary materials that can be collected rather than the concrete component itself;
- Target detection rather than material identification: Compared with material identification, target detection considers not only the texture of the material, but also the context information in the image. In this way, the detection results can be specific to the type of components, which is more accurate and avoids the confusion of adjacent components;
- Rough registration: In the process of registration between the target detection results and BIM model projection, four constraints are set to exclude irrelevant components, which improves the registration efficiency and accuracy. In addition, rough registration is not strict registration, which provides a certain fault tolerance space and ensures the accuracy of registration;
- Point cloud avoidance: The current 3D reconstruction process mainly relies on the point cloud, however, there are some inherent shortcomings in point cloud-based 3D reconstruction. Firstly, it is time-consuming to remove all points of the backgrounds and the objects of no interest, and there is no guarantee on the completeness of the point clouds. In addition, the point clouds also have problems such as high noise, difficulty in segmentation and registration. The proposed method does not need to infer the progress by calculating the space occupied by feature points, so the trouble caused by the point cloud is avoided.
5.5. Limitations
- External parameter error accumulation: The quality of the lens, the inaccuracy of the manual estimation of the coordinates of the known points in the initial image, the registration error between images and other factors will cause the inaccuracy of the estimated external parameters. After several iterations, the five errors accumulate continuously. Therefore, external parameters need to be adjusted regularly to keep them accurate;
- Incompatibility with indoor scenes: The indoor space is limited, and the camera is very close to the subject. If you want to include all the scene details as much as possible, you need to take a lot of photos. The more photos, the lower the accuracy of camera calibration results. Multiple start scenes must be set to improve the registration accuracy. However, each initial scenario requires manual participation, which is not in line with the original intention of automatically collecting progress information. Therefore, this method needs to be further improved to adapt to indoor scenes in the future.
5.6. Application
6. Conclusions and Future Works
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wua, K.; de Sotob, B.G.; Adeyc, B.T.; Zhanga, F. BIM-based estimation of vertical transportation demands during the construction of high-rise buildings. Autom. Constr. 2020, 110, 102985. [Google Scholar] [CrossRef]
- Do, S.T.; Nguyen, V.T.; Dang, C.N. Exploring the relationship between failure factors and stakeholder coordination performance in high-rise building projects: Empirical study in the finishing phase. Eng. Constr. Archit. Manag. 2021; ahead-of-print. [Google Scholar] [CrossRef]
- Andriasyan, M.; Moyano, J.; Nieto-Julián, J.E.; Antón, D. From point cloud data to building information modelling: An automatic parametric workflow for heritage. Remote Sens. 2020, 12, 1094. [Google Scholar] [CrossRef]
- Adan, A.; Quintana, B.; Prieto, S.A.; Bosche, F. An autonomous robotic platform for automatic extraction of detailed semantic models of buildings. Autom. Constr. 2020, 109, 102963. [Google Scholar] [CrossRef]
- Liu, J.; Xu, D.; Hyyppa, J.; Liang, Y. A survey of applications with combined BIM and 3D laser scanning in the life cycle of buildings. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2021, 14, 5627–5637. [Google Scholar] [CrossRef]
- Zhang, C.; Arditi, D. Advanced progress control of infrastructure construction projects using terrestrial laser scanning technology. Infrastructures 2020, 5, 83. [Google Scholar] [CrossRef]
- Bechtold, S.; Höfle, B. Helios: A multi-purpose LiDAR simulation framework for research, planning and training of laser scanning operations with airborne, ground-based mobile and stationary platforms. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, III-3, 161–168. [Google Scholar] [CrossRef]
- Hong, S.; Park, I.; Lee, J.; Lim, K.; Choi, Y.; Sohn, H.G. Utilization of a terrestrial laser scanner for the calibration of mobile mapping systems. Sensors 2017, 17, 474. [Google Scholar] [CrossRef]
- Rebolj, D.; Pučko, Z.; Babič, N.Č.; Bizjak, M.; Mongus, D. Point cloud quality requirements for Scan-vs-BIM based automated construction progress monitoring. Autom. Constr. 2017, 84, 323–334. [Google Scholar] [CrossRef]
- Xu, Y.; Stilla, U. Toward building and civil infrastructure reconstruction from point clouds: A review on data and key techniques. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2021, 14, 2857–2885. [Google Scholar] [CrossRef]
- Omar, H.; Mahdjoubi, L.; Kheder, G. Towards an automated photogrammetry-based approach for monitoring and controlling construction site activities. Comput. Ind. 2018, 98, 172–182. [Google Scholar] [CrossRef]
- Yang, J.; Shi, Z.-K.; Wu, Z.-Y. Towards automatic generation of as-built BIM: 3D building facade modeling and material recognition from images. Int. J. Autom. Comput. 2016, 13, 338–349. [Google Scholar] [CrossRef]
- Kropp, C.; Koch, C.; König, M. Interior construction state recognition with 4D BIM registered image sequences. Autom. Constr. 2018, 86, 11–32. [Google Scholar] [CrossRef]
- Acharya, D.; Ramezani, M.; Khoshelham, K.; Winter, S. BIM-Tracker: A model-based visual tracking approach for indoor localisation using a 3D building model. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, 150, 157–171. [Google Scholar] [CrossRef]
- Deng, H.; Hong, H.; Luo, D.; Deng, Y.; Su, C. Automatic indoor construction process monitoring for tiles based on BIM and computer vision. J. Constr. Eng. M. 2020, 146, 04019095. [Google Scholar] [CrossRef]
- Han, X.-F.; Laga, H.; Bennamoun, M. Image-based 3D object reconstruction: State-of-the-art and trends in the deeplearning era. IEEE T. Pattern Anal. 2019, 43, 1578–1604. [Google Scholar] [CrossRef]
- Liu, Y.-p.; Yan, X.-p.; Wang, N.; Zhang, X.; Li, Z. A 3D reconstruction method of image sequence based on deep learning. J. Phys. Conf. Ser. 2020, 1550, 032051. [Google Scholar] [CrossRef]
- Golparvar-Fard, M.; Peña-Mora, F.; Savarese, S. Automated progress monitoring using unordered daily construction photographs and IFC-based building information models. J. Comput. Civil Eng. 2015, 29, 04014025. [Google Scholar] [CrossRef]
- Golparvar-Fard, M.; Peña-Mora, F.; Arboleda, C.A.; Lee, S. Visualization of construction progress monitoring with 4D simulation model overlaid on time-lapsed photographs. J. Comput. Civil Eng. 2009, 23, 391–404. [Google Scholar] [CrossRef]
- Pučko, Z.; Šuman, N.; Rebolj, D. Automated continuous construction progress monitoring using multiple workplace real time 3D scans. Adv. Eng. Inform. 2018, 38, 27–40. [Google Scholar] [CrossRef]
- Dimitrov, A.; Golparvar-Fard, M. Vision-based material recognition for automated monitoring of construction progress and generating building information modeling from unordered site image collections. Adv. Eng. Inform. 2014, 28, 37–49. [Google Scholar] [CrossRef]
- Lee, Y.-J.; Park, M.-W. 3D tracking of multiple onsite workers based on stereo vision. Autom. Constr. 2019, 98, 146–159. [Google Scholar] [CrossRef]
- Park, M.-W.; Brilakis, I. Construction worker detection in video frames for initializing vision trackers. Autom. Constr. 2012, 28, 15–25. [Google Scholar] [CrossRef]
- Son, H.; Kim, C. Integrated worker detection and tracking for the safe operation of construction machinery. Autom. Constr. 2021, 126, 103670. [Google Scholar] [CrossRef]
- Park, M.-W.; Brilakis, I. Continuous localization of construction workers via integration of detection and tracking. Autom. Constr. 2016, 72, 129–142. [Google Scholar] [CrossRef]
- Xiao, B.; Kang, S.-C. Vision-based method integrating deep learning detection for tracking multiple construction machines. J. Comput. Civil Eng. 2021, 35, 04020071. [Google Scholar] [CrossRef]
- Xiao, B.; Lin, Q.; Chen, Y. A vision-based method for automatic tracking of construction machines at nighttime based on deep learning illumination enhancement. Autom. Constr. 2021, 127, 103721. [Google Scholar] [CrossRef]
- Zhu, Z.; Ren, X.; Chen, Z. Integrated detection and tracking of workforce and equipment from construction jobsite videos. Autom. Constr. 2017, 81, 161–171. [Google Scholar] [CrossRef]
- Hou, X.; Zeng, Y.; Xue, J. Detecting structural components of building engineering based on deep-learning method. J. Constr. Eng. M. 2020, 146, 04019097. [Google Scholar] [CrossRef]
- Braun, A.; Tuttas, S.; Borrmann, A.; Stilla, U. A concept for automated construction progress monitoring using BIM-based geometric constraints and photogrammetric point clouds. J. Inf. Technol. Constr. 2015, 20, 68–79. [Google Scholar]
- Han, K.; Degol, J.; Golparvar-Fard, M. Geometry-and appearance-based reasoning of construction progress monitoring. J. Constr. Eng. M. 2018, 144, 04017110. [Google Scholar] [CrossRef]
- Han, K.K.; Golparvar-Fard, M. Appearance-based material classification for monitoring of operation-level construction progress using 4D BIM and site photologs. Autom. Constr. 2015, 53, 44–57. [Google Scholar] [CrossRef]
- Rahimian, F.P.; Seyedzadeh, S.; Oliver, S.; Rodriguez, S.; Dawood, N. On-demand monitoring of construction projects through a game-like hybrid application of BIM and machine learning. Autom. Constr. 2020, 110, 103012. [Google Scholar] [CrossRef]
- Son, H.; Kim, C.; Kim, C. Automated color model-based concrete detection in construction-site images by using machine learning algorithms. J. Comput. Civil Eng. 2012, 26, 421–433. [Google Scholar] [CrossRef]
- Zhu, Z.; Brilakis, I. Parameter optimization for automated concrete detection in image data. Autom. Constr. 2010, 19, 944–953. [Google Scholar] [CrossRef]
- Zhu, Z.; Brilakis, I. Concrete column recognition in images and videos. J. Comput. Civil Eng. 2010, 24, 478–487. [Google Scholar] [CrossRef]
- Wang, Z.; Zhang, Q.; Yang, B.; Wu, T.; Lei, K.; Zhang, B.; Fang, T. Vision-based framework for automatic progress monitoring of precast walls by using surveillance videos during the construction phase. J. Comput. Civil Eng. 2021, 35, 04020056. [Google Scholar] [CrossRef]
- Bassier, M.; Van Genechten, B.; Vergauwen, M. Classification of sensor independent point cloud data of building objects using random forests. J. Build. Eng. 2019, 21, 468–477. [Google Scholar] [CrossRef]
- Wang, R.; Peethambaran, J.; Chen, D. LiDAR point clouds to 3-D urban models: A review. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2018, 11, 606–627. [Google Scholar] [CrossRef]
- Wang, Q.; Tan, Y.; Mei, Z. Computational methods of acquisition and processing of 3D point cloud data for construction applications. Arch. Comput. Method Eng. 2019, 27, 479–499. [Google Scholar] [CrossRef]
- Czerniawski, T.; Leite, F. Automated digital modeling of existing buildings: A review of visual object recognition methods. Autom. Constr. 2020, 113, 103131. [Google Scholar] [CrossRef]
- Alizadeh Salehi, S.; Yitmen, İ. Modeling and analysis of the impact of BIM-based field data capturing technologies on automated construction progress monitoring. Int. J. Civil Eng. 2018, 16, 1669–1685. [Google Scholar] [CrossRef]
- Pučko, Z.; Rebolj, D. Automated construction progress monitoring using continuous multipoint indoor and outdoor 3D scanning. In Proceedings of the Lean and Computing in Construction Congress -Joint Conference on Computing in Construction, Heraklion, Greece, 4–7 July 2017; pp. 105–112. [Google Scholar] [CrossRef]
- Li, Y.; Li, W.; Tang, S.; Darwish, W.; Hu, Y.; Chen, W. Automatic indoor as-built building information models generation by using low-cost RGB-D sensors. Sensors 2020, 20, 293. [Google Scholar] [CrossRef] [PubMed]
- Wasenmüller, O.; Stricker, D. Comparison of kinect v1 and v2 depth images in terms of accuracy and precision. In Proceedings of the Asian Conference on Computer Vision(ACCV 2016), Taipei, Taiwan, China, 20–24 November 2016; pp. 34–45. [Google Scholar] [CrossRef]
- Volk, R.; Luu, T.H.; Mueller-Roemer, J.S.; Sevilmis, N.; Schultmann, F. Deconstruction project planning of existing buildings based on automated acquisition and reconstruction of building information. Autom. Constr. 2018, 91, 226–245. [Google Scholar] [CrossRef]
- Kim, C.; Kim, B.; Kim, H. 4D CAD model updating using image processing-based construction progress monitoring. Autom. Constr. 2013, 35, 44–52. [Google Scholar] [CrossRef]
- Ibrahim, Y.M.; Lukins, T.C.; Zhang, X.; Trucco, E.; Kaka, A.P. Towards automated progress assessment of workpackage components in construction projects using computer vision. Adv. Eng. Inform. 2009, 23, 93–103. [Google Scholar] [CrossRef]
- Han, K.K.; Golparvar-Fard, M. Potential of big visual data and building information modeling for construction performance analytics: An exploratory study. Autom. Constr. 2017, 73, 184–198. [Google Scholar] [CrossRef]
- Song, J.; Haas, C.T.; Caldas, C.H. Tracking the location of materials on construction job sites. J. Constr. Eng. M. 2006, 132, 911–918. [Google Scholar] [CrossRef]
- Navon, R.; Sacks, R. Assessing research issues in Automated Project Performance Control (APPC). Autom. Constr. 2007, 16, 474–484. [Google Scholar] [CrossRef]
- Tserng, H.P.; Dzeng, R.J.; Lin, Y.C.; Lin, S.T. Mobile construction supply chain management using PDA and bar codes. Comput. Aided Civ. Infrastruct. Eng. 2005, 20, 242–264. [Google Scholar] [CrossRef]
- Chen, Q.; Adey, B.T.; Haas, C.; Hall, D.M. Using look-ahead plans to improve material flow processes on construction projects when using BIM and RFID technologies. Constr. Innov. 2020, 20, 471–508. [Google Scholar] [CrossRef]
- Oner, M.; Ustundag, A.; Budak, A. An RFID-based tracking system for denim production processes. Int. J. Adv. Manuf. Technol. 2017, 90, 591–604. [Google Scholar] [CrossRef]
- Araújo, C.S.; de Siqueira, L.C.; Ferreira ED, A.M.; Costa, D.B. Conceptual framework for tracking metallic formworks on construction sites using IoT, RFID and BIM technologies. In Proceedings of the 18th International Conference on Computing in Civil and Building Engineering, São Paulo, Brazil, 18–20 August 2020; pp. 865–878. [Google Scholar] [CrossRef]
- Cho, Y.K.; Youn, J.H.; Martinez, D. Error modeling for an untethered ultra-wideband system for construction indoor asset tracking. Autom. Constr. 2010, 19, 43–54. [Google Scholar] [CrossRef]
- Chu, C.-C.; Nandhakumar, N.; Aggarwal, J.K. Image segmentation using laser radar data. Pattern Recognit. 1990, 23, 569–581. [Google Scholar] [CrossRef]
- GitHub. LabelImg: A Graphical Image Annotation Tool. Available online: https://github.com/tzutalin/labelImg (accessed on 15 January 2020).
- Shen, Z.; Liu, Z.; Li, J.; Jiang, Y.-G.; Chen, Y.; Xue, X. DSOD: Learning deeply supervised object detectors from scratch. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 1937–1945. [Google Scholar] [CrossRef]
- Huang, G.; Liu, Z.; Van Der Maaten, L.; Weinberger, K.Q. Densely connected convolutional networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 4700–4708. [Google Scholar] [CrossRef]
- GitHub. DSOD: Learning Deeply Supervised Object Detectors from Scratch. Available online: https://github.com/szq0214/DSOD (accessed on 15 January 2020).
- Zhang, Z. Flexible camera calibration by viewing a plane from unknown orientations. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Kerkyra, Greece, 20–27 September 1999; pp. 666–673. [Google Scholar] [CrossRef]
- GitHub. Sfm-Python. Available online: https://github.com/adnappp/Sfm-python (accessed on 15 January 2020).
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vision 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Denœux, T. A k-nearest neighbor classification rule based on Dempster-Shafer theory. IEEE Trans. Syst. Man Cybern. 1995, 219, 804–813. [Google Scholar] [CrossRef]
- Lepetit, V.; Moreno-Noguer, F.; Fua, P. EPnP: An accurate O(n) solution to the PnP problem. Int. J. Comput. Vision 2009, 81, 155–166. [Google Scholar] [CrossRef]
- Nuchter, A.; Hertzberg, J. Towards semantic maps for mobile robots. Robot. Auton. Syst. 2008, 56, 915–926. [Google Scholar] [CrossRef]
- Nguyen, T.-H.; Oloufa, A.A.; Nassar, K. Algorithms for automated deduction of topological information. Autom. Constr. 2005, 14, 59–70. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Method | Advantage | Limitation | References |
|---|---|---|---|---|
| Imaging techniques | Laser scanning | Automated data collection, high accuracy, not affected by illumination | Expensive equipment, high technical requirements, and limited texture information | [3,4,5,6,43,44] |
| 3D ranging camera | Portable, relatively cheap and rich texture information | short range applications | [20,45,46] | |
| Image-based modeling | Low cost, low technical requirements, portable, high resolution, and rich texture information | Sensitivity to lighting conditions and high time complexity | [11,12,13,14,16,17] | |
| Material classification of projection area | Low cost, low technical requirements, portable, high resolution, and rich texture information | Sensitivity to lighting conditions and high time complexity | [31,32,47,48,49] | |
| Geospatial techniques | GPS | Wide positioning range and strong adaptability | Low precision and limited to outdoor | [50] |
| Barcode | Low cost and simple operation requirements | Time consuming and easily damaged | [51,52] | |
| RFID | Wide practicability and no need for light | Time consuming, and error prone in the presence of metals and liquids | [53,54,55] | |
| UWB | Reliable signals, longer read ranges, provide 3D position estimate | High cost and no mini device or daily-necessity-embedded too | [56] |
| Stage | Example of Construction Site | Main Work Content and Construction Site States | Recognizable Components and States |
|---|---|---|---|
| Start (Concrete curing) |  | Work: Concrete curing of the last floor State: The concrete slab is flat, although there are sporadic protruding steel bars. | - |
| Preparation |  | Work: Molds and materials preparation and formwork removal from the last floor State: Formwork, steel bars, supports and other tools are piled up on the floor, which makes the construction site chaotic. | Stacked formwork * |
| Facade construction |  | Work: Steel bar binding and formwork supporting for columns and shear walls State: The back of the formwork occupies most of the area in the top view, and there are many bars arranged on it, so the construction site is relatively regular. | Walls or columns with formwork |
| Formwork for plane |  | Work: Formwork for slabs and beams State: The vertical templates are gradually blocked, leaving neatly arranged flat templates with obvious boundaries. | Slabs with bottom formwork and Beams enclosed by formwork |
| Steel bar binding in plane |  | Work: Steel bar binding for slabs State: There are steel cages on the slab, and the boundaries between the formworks become blurred. | Slabs with steel cages and Beams with steel cages |
| Concrete pouring |  | Work: Concrete pouring State: There are steel cages on the slab. With the pouring of concrete, the steel cages gradually disappear, and the boundaries of the formwork change from fuzzy to clear and then disappear. | Slabs with steel cages and Beams with steel cages and Pouring tools * |
| Stage | Component’s Type | # of Comp. in BIM 2 | # of Comp. in Images | # of Detected Comp. | # of Correctly Detected Comp. | Detection Accuracy 3 |
|---|---|---|---|---|---|---|
| Preparation | Stacked formwork | 0 | 17.75 | 17.75 | 17.75 | 100.00% |
| Facade construction | Walls or columns with formwork | 82 | 51.67 | 37.33 | 36.25 | 70.16% |
| Formwork for plane | Slabs with bottom formwork | 62 | 44.65 | 44.35 | 43.60 | 97.65% |
| Beams enclosed by formwork | 118 | 81.50 | 76.75 | 75.60 | 92.76% | |
| Steel bar binding in plane | Slabs with steel cages | 62 | 55.73 | 41.09 | 40.00 | 71.78% |
| Beams with steel cages | 118 | 105.91 | 81.09 | 80.73 | 76.22% | |
| Concrete pouring | Slabs with steel cages | 62 | 62.00 | 51.17 | 50.17 | 80.91% |
| Beams with steel cages | 118 | 118.00 | 101.80 | 100.40 | 85.08% | |
| Pouring tools | 0 | 1.00 | 1.00 | 1.00 | 100.00% |
| Stage | Component’s Type | # of Comp. in Images | # of Correctly Detected Comp. | # of Registered Comp. | # of Correctly Registered Comp. | Registration Accuracy 2 | Progress Collection Ratio 3 |
|---|---|---|---|---|---|---|---|
| Facade construction | Walls or columns with formwork | 51.67 | 36.25 | 32.25 | 32.00 | 88.28% | 61.94% |
| Formwork for plane | Slabs with bottom formwork | 44.65 | 43.60 | 42.70 | 42.20 | 96.79% | 94.51% |
| Beams enclosed by formwork | 81.50 | 75.60 | 71.80 | 71.05 | 93.98% | 87.18% | |
| Steel bar binding in plane | Slabs with steel cages | 55.73 | 40.00 | 38.45 | 38.00 | 95.00% | 68.19% |
| Beams with steel cages | 105.91 | 80.73 | 76.55 | 76.00 | 94.14% | 71.76% | |
| Concrete pouring | Slabs with steel cages | 62.00 | 50.17 | 48.67 | 48.33 | 96.35% | 77.96% |
| Beams with steel cages | 118.00 | 100.40 | 95.80 | 95.00 | 94.62% | 80.51% | |
| Pouring tools | 1.00 | 1.00 | - | - | - | - |
| Stage | Step | Repeatability and Automation |
|---|---|---|
| Target detector training | Image collection and labeling | Data can be supplemented, and this step is unnecessary to repeat. |
| model training | Unnecessary repetition | |
| Camera calibration | Internal parameter calibration | Need to be repeated, and calibrated once for each camera |
| Initial external parameter acquisition | Need to be repeated, and calibrated once for each scene | |
| External parameter update | Need to be repeated, and updated through automated iterations | |
| Registration | Projection | Need to be repeated, and automated |
| Screening | Need to be repeated, and automated | |
| Rough registration | Need to be repeated, and automated | |
| Progress reasoning | Progress reasoning | Need to be repeated, and automated |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xue, J.; Hou, X. High-Rise Building Construction Progress Measurement from Top View Based on Component Detection. Buildings 2022, 12, 106. https://doi.org/10.3390/buildings12020106
Xue J, Hou X. High-Rise Building Construction Progress Measurement from Top View Based on Component Detection. Buildings. 2022; 12(2):106. https://doi.org/10.3390/buildings12020106
Chicago/Turabian StyleXue, Jingguo, and Xueliang Hou. 2022. "High-Rise Building Construction Progress Measurement from Top View Based on Component Detection" Buildings 12, no. 2: 106. https://doi.org/10.3390/buildings12020106
APA StyleXue, J., & Hou, X. (2022). High-Rise Building Construction Progress Measurement from Top View Based on Component Detection. Buildings, 12(2), 106. https://doi.org/10.3390/buildings12020106