Evaluation of Transient Response of Turbochargers and Turbines Using Database Method for the Nonlinear Forces of Journal Bearings


Abstract
:1. Introduction
2. The Database Method and Its Application in Journal Bearings
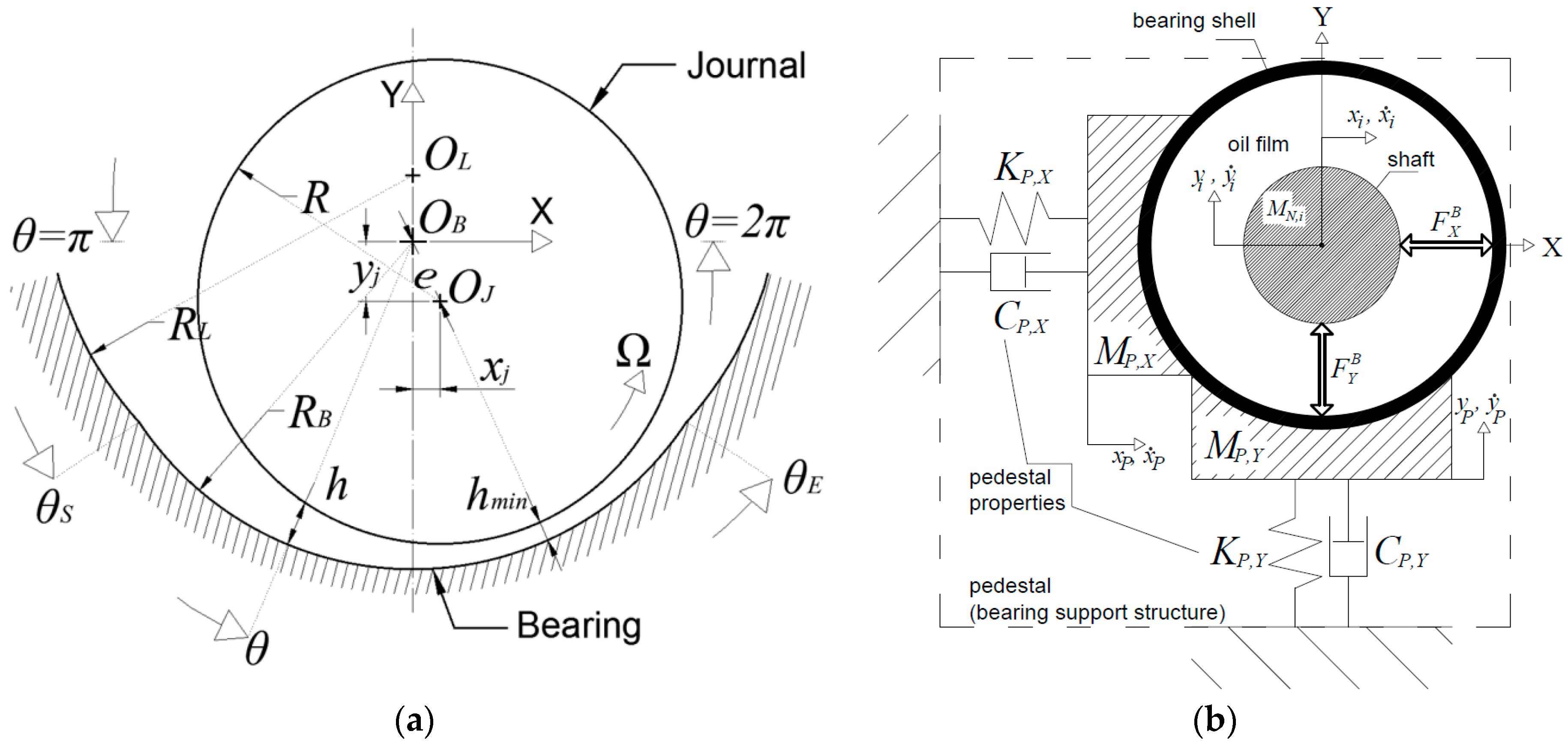
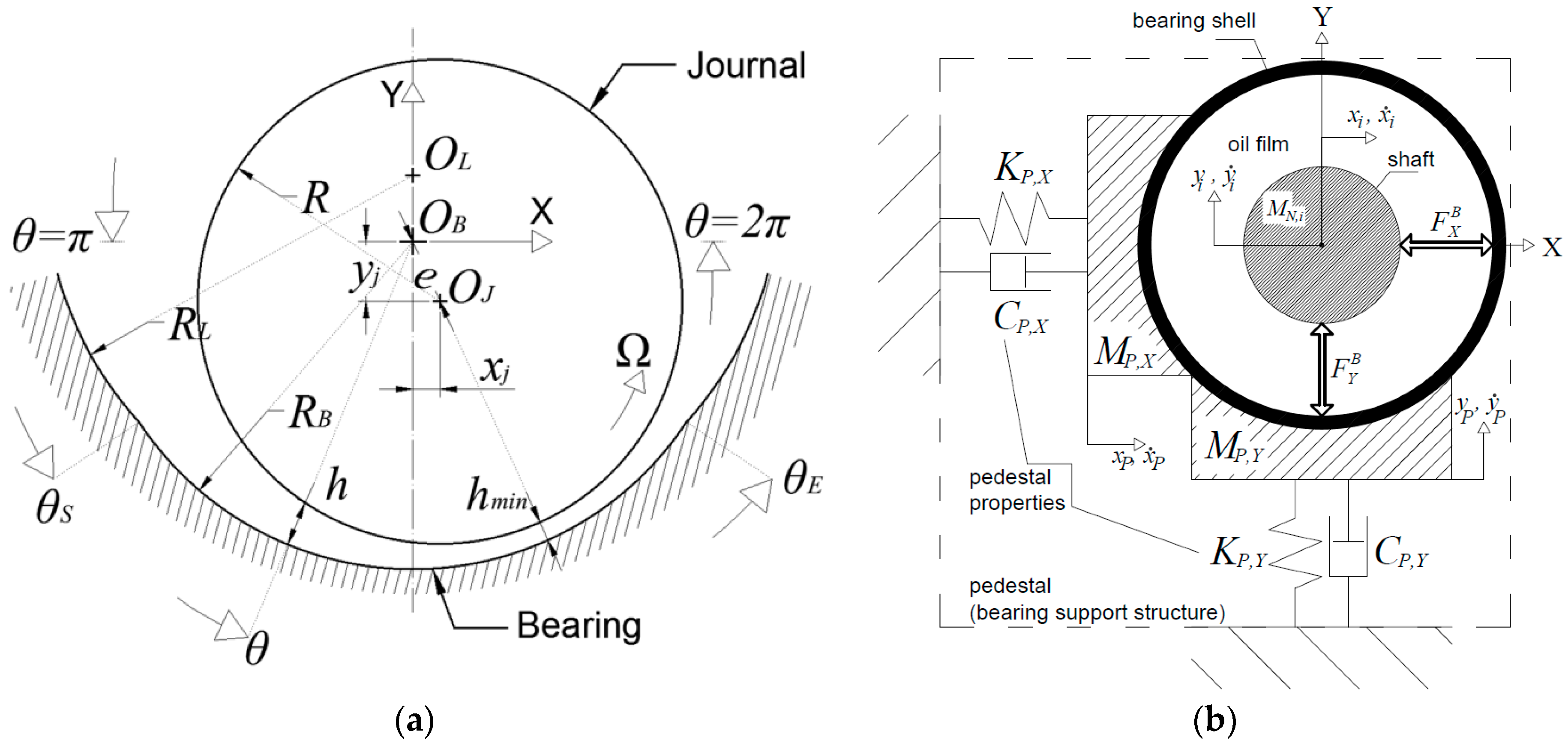
2.1. Application of the Method in Fixed Profile Bearings
- If , then
- If , then
- If , then the resulting fluid film forces and torque components are given in dimensionless form in Equation (9):For Gümbel boundary conditions, only values are implemented in the double sum.
- If , then the resulting fluid film forces and friction torque components are given in dimensionless form in Equation (10):For Gümbel boundary conditions, only values are implemented in the double sum.
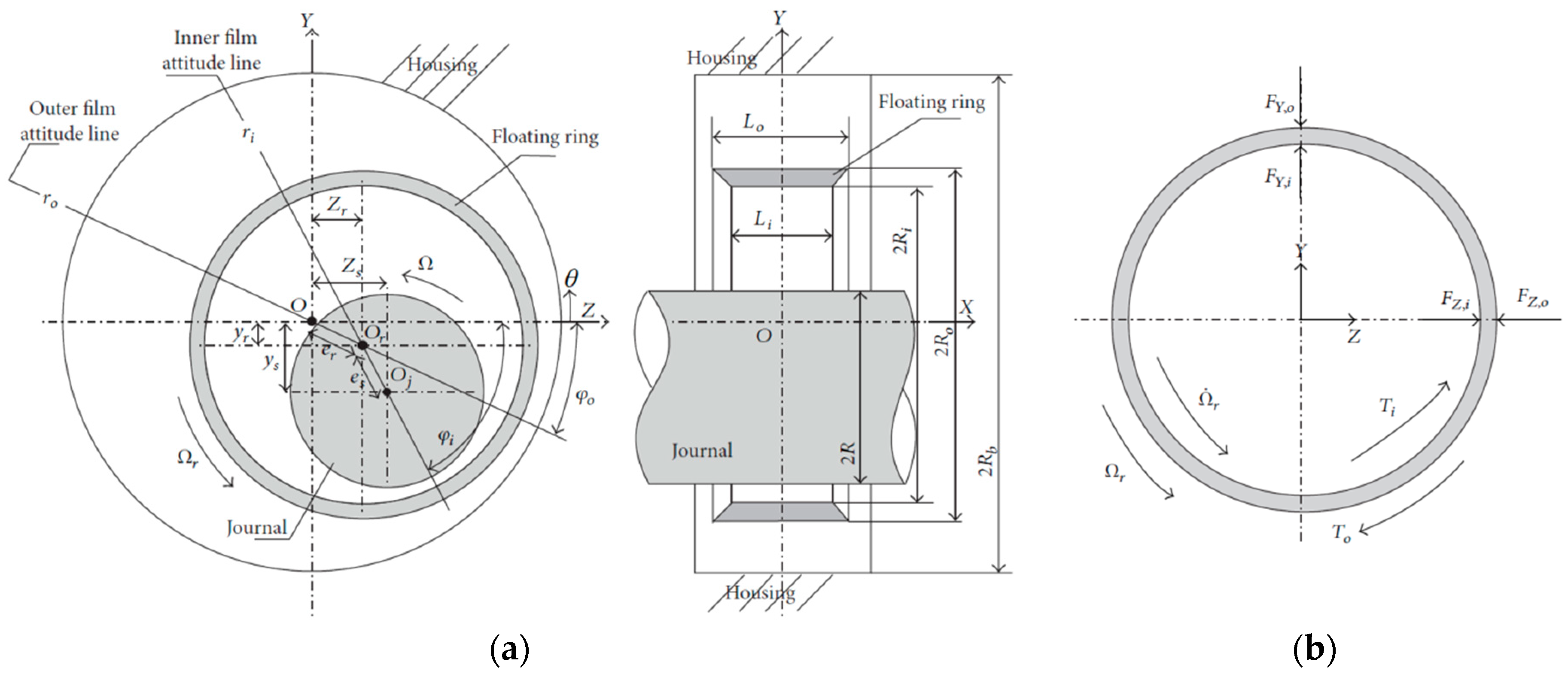
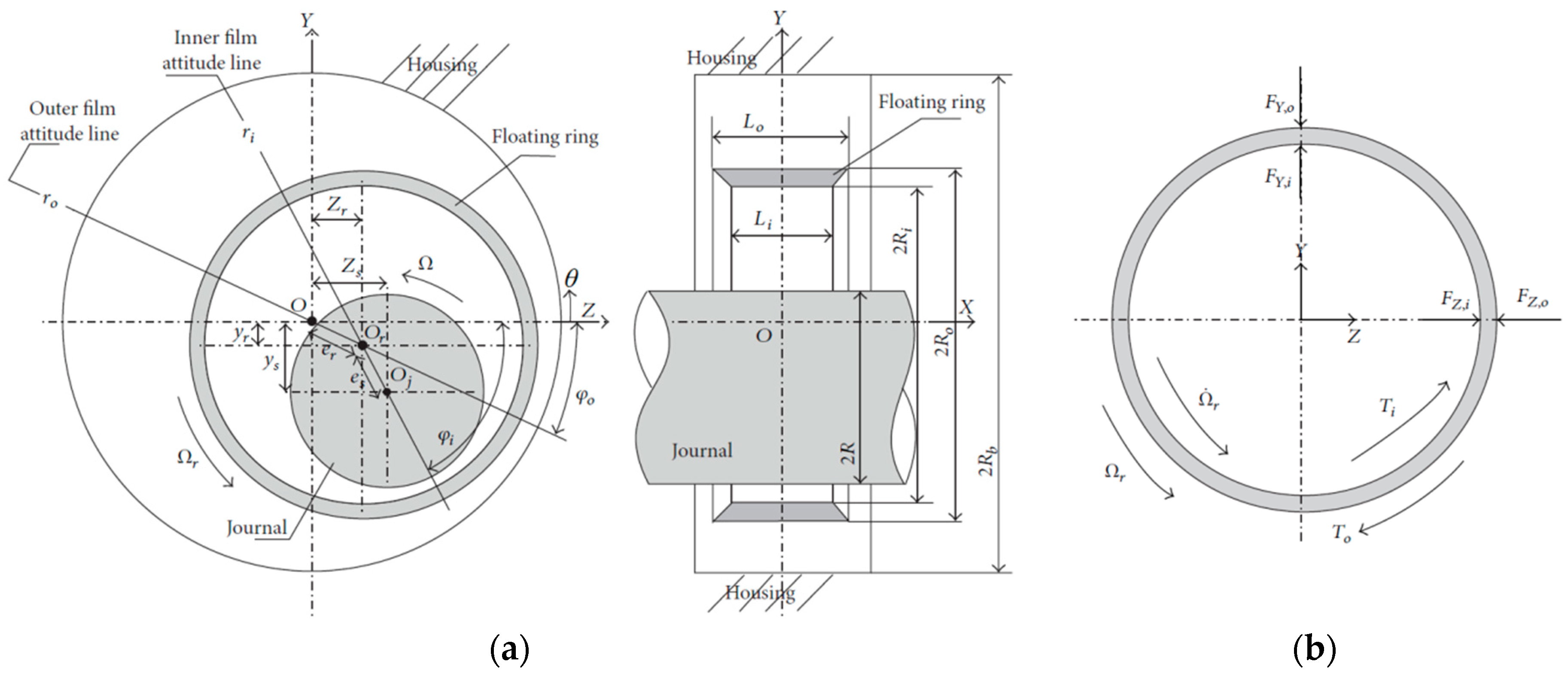
2.2. Application of the Method in Floating Ring Bearings
- If , then
- If , then
- If , then
- If , then
3. Evaluation of Nonlinear Transient Response Using the Bearing Database Method
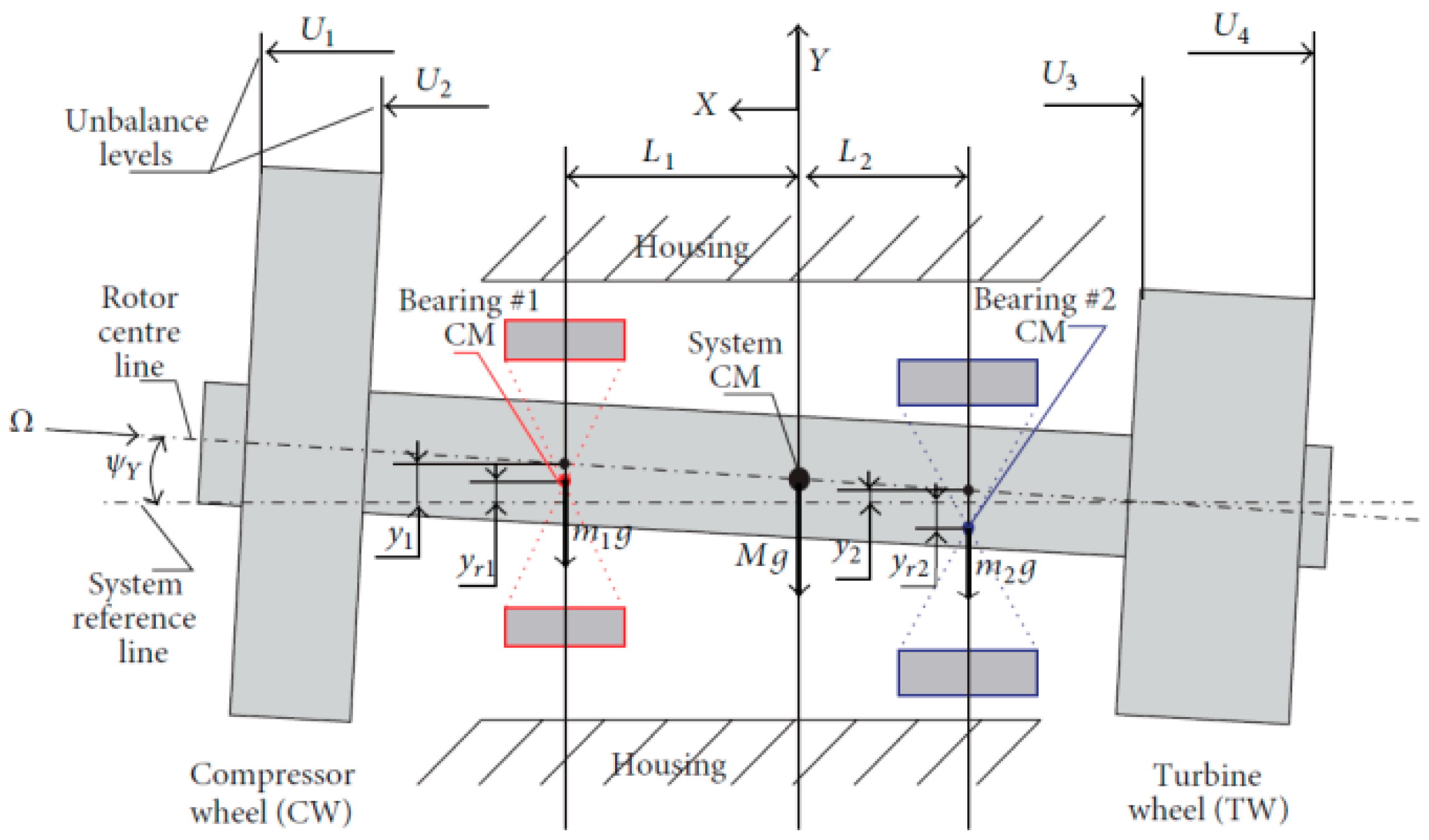
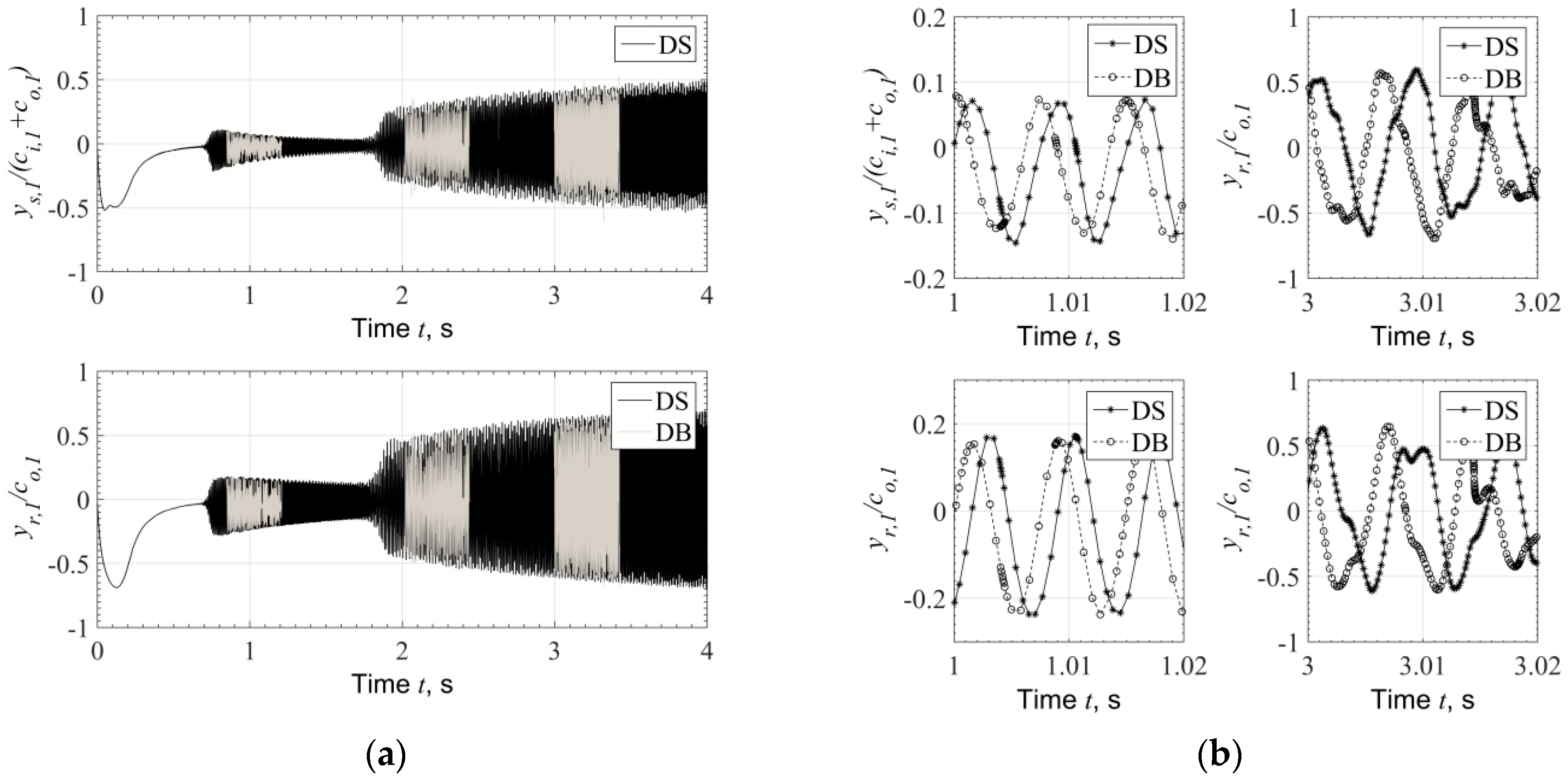
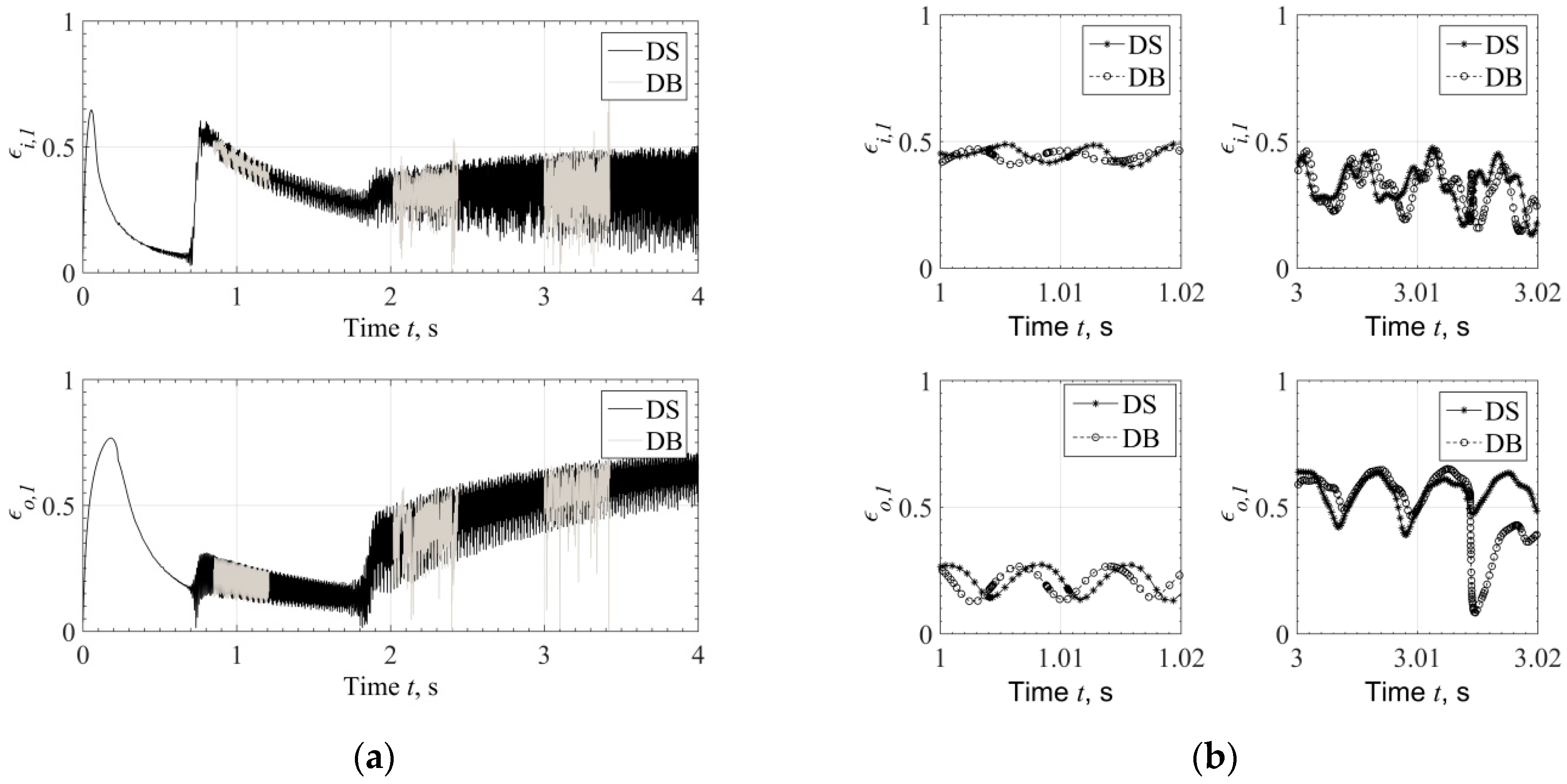
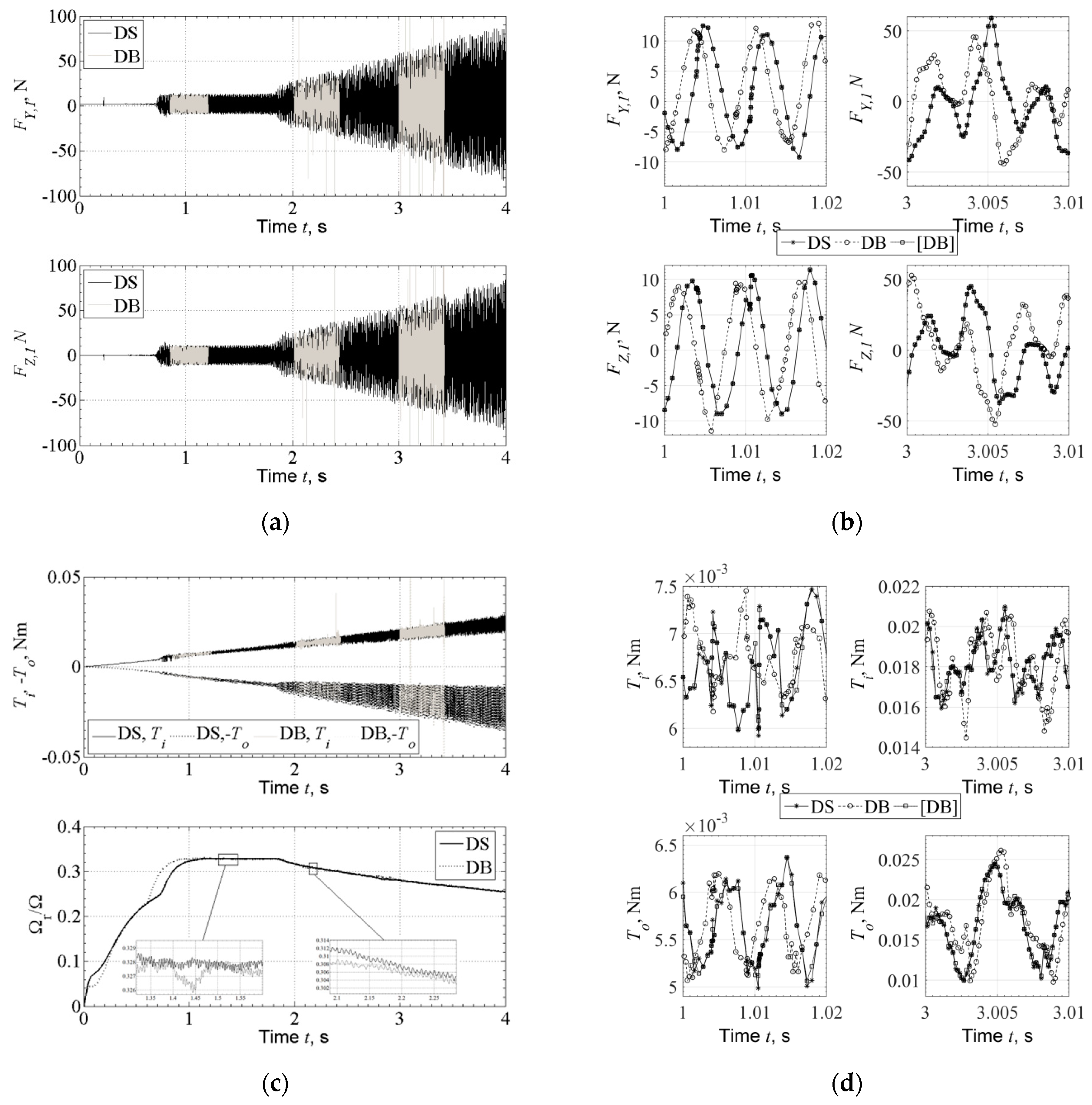
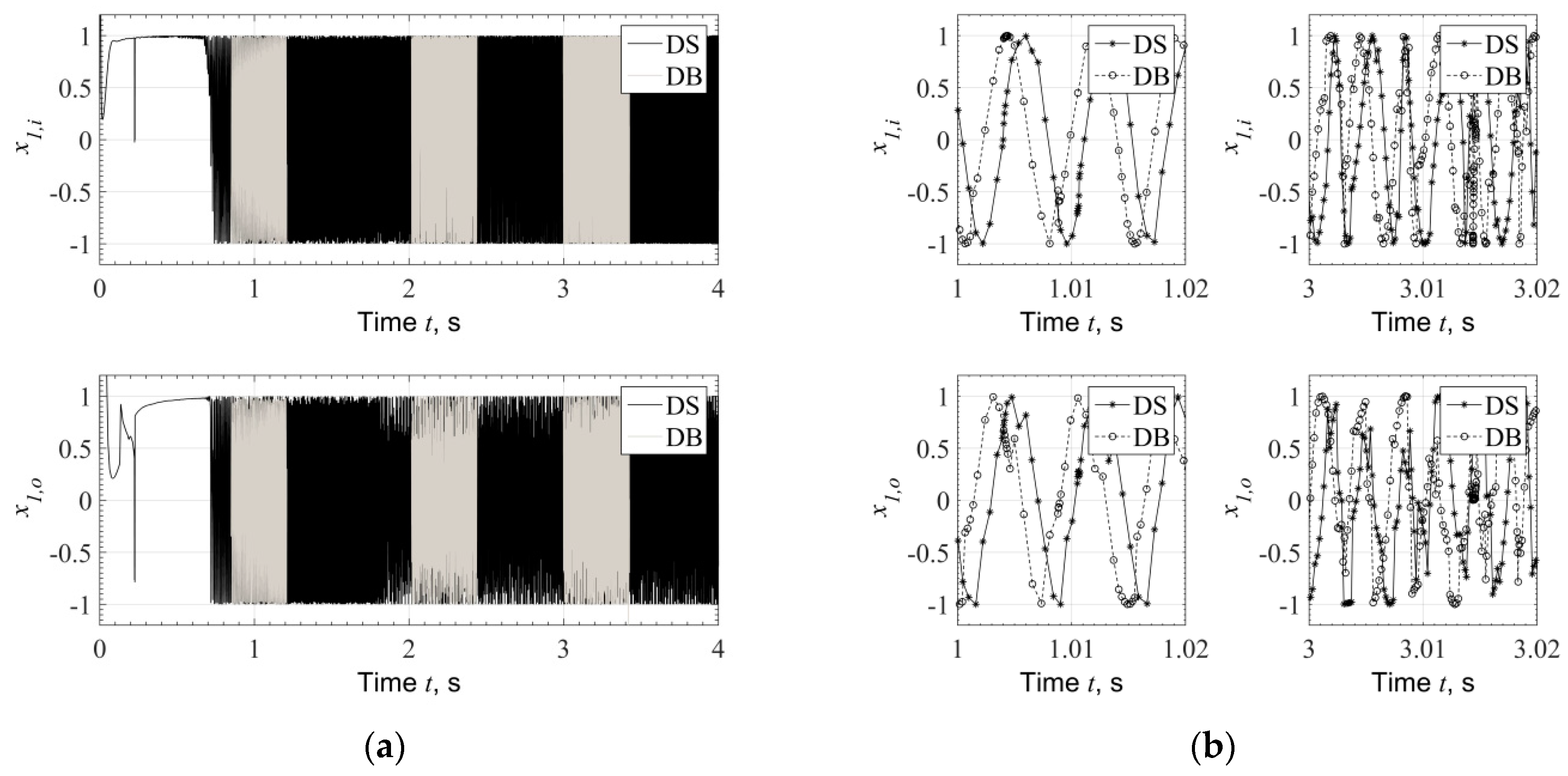
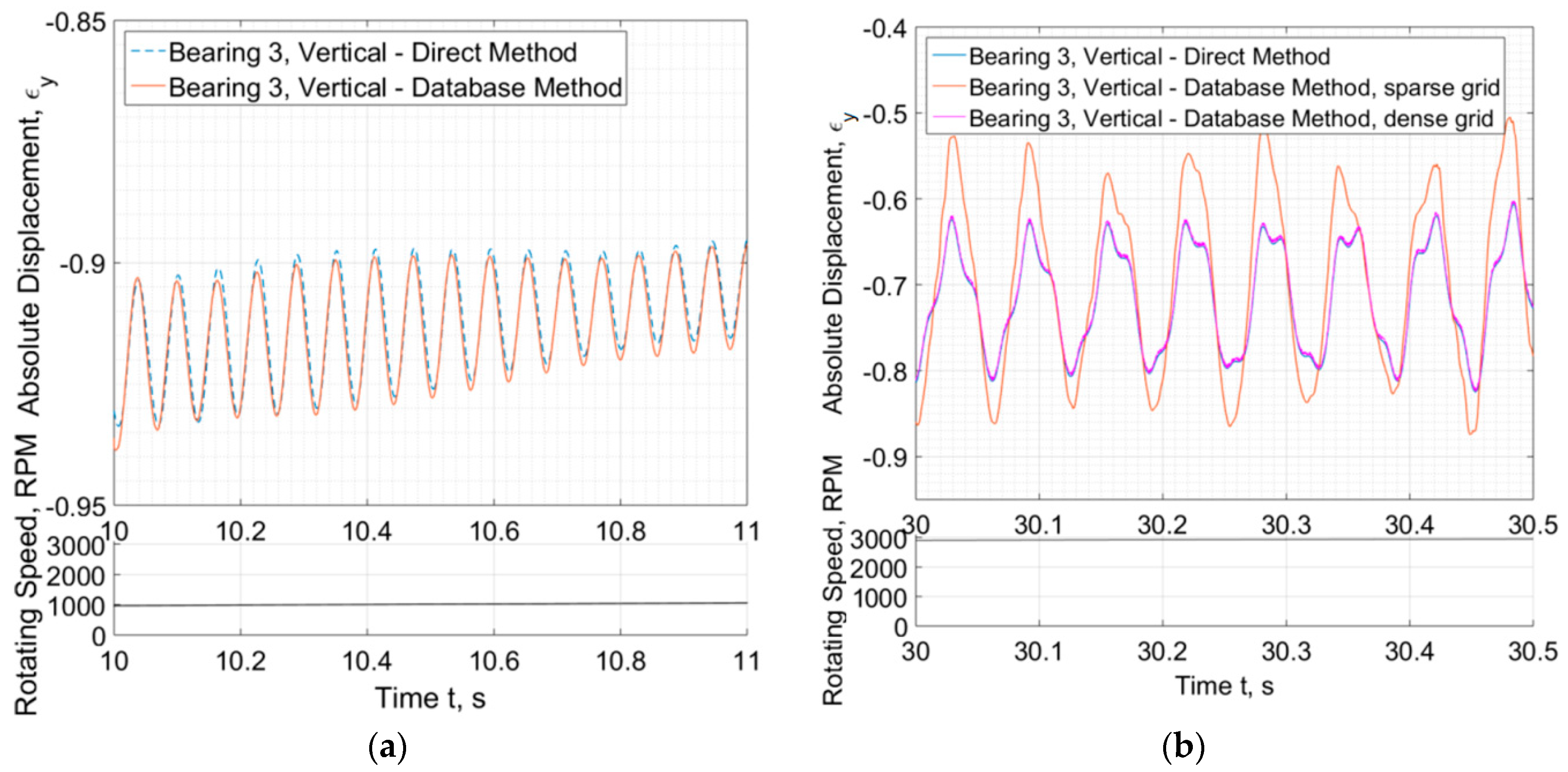
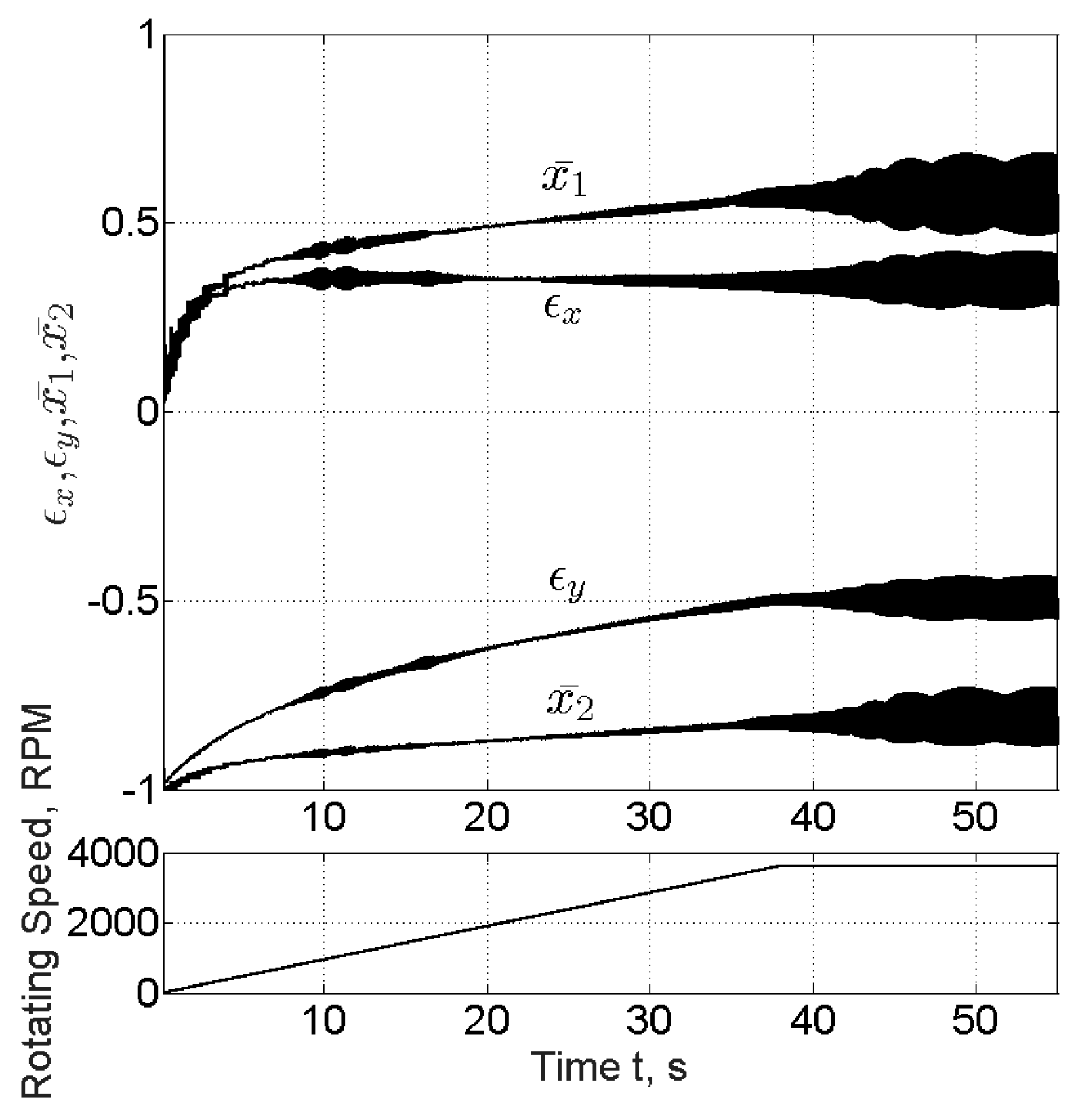
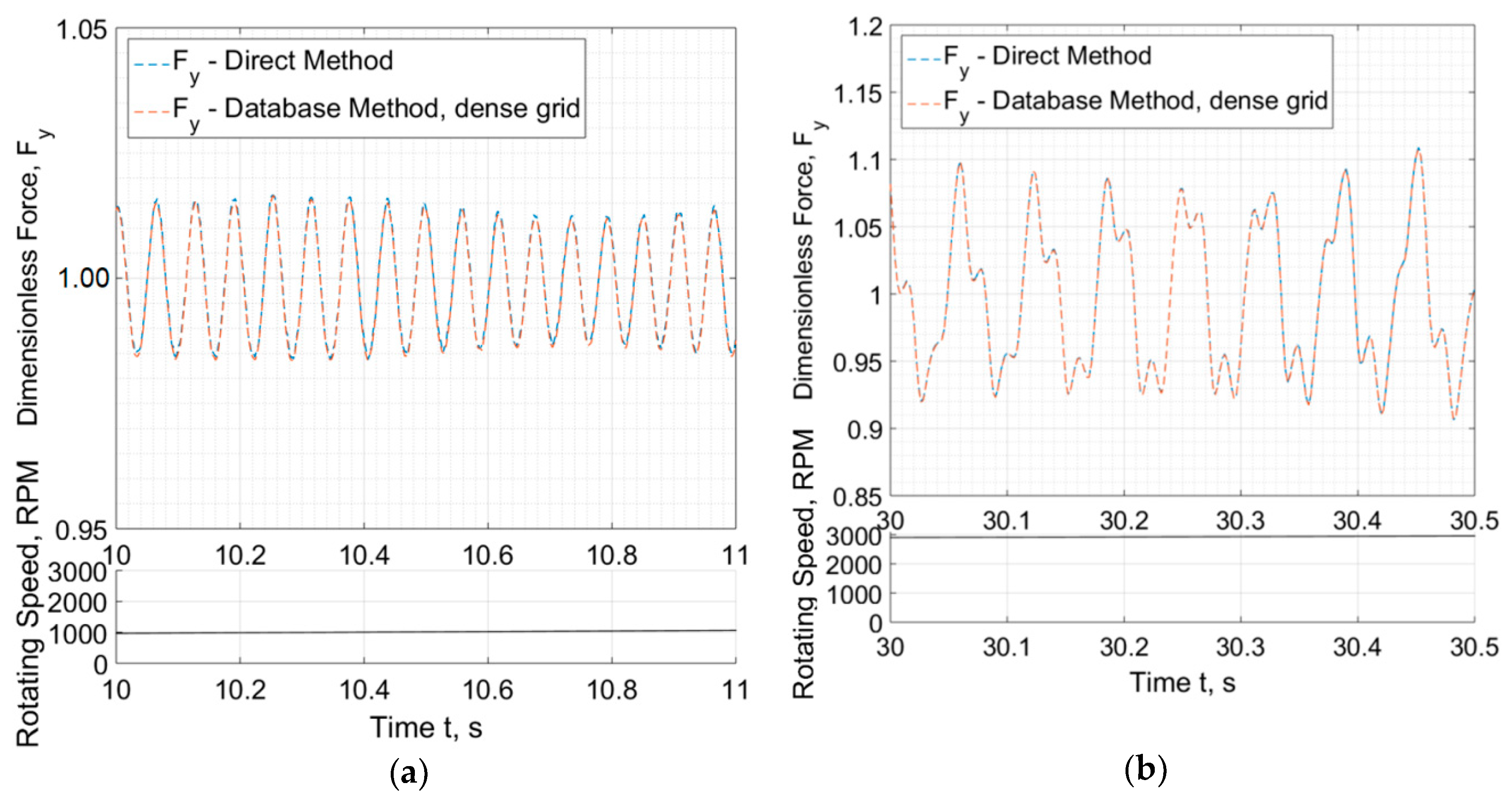
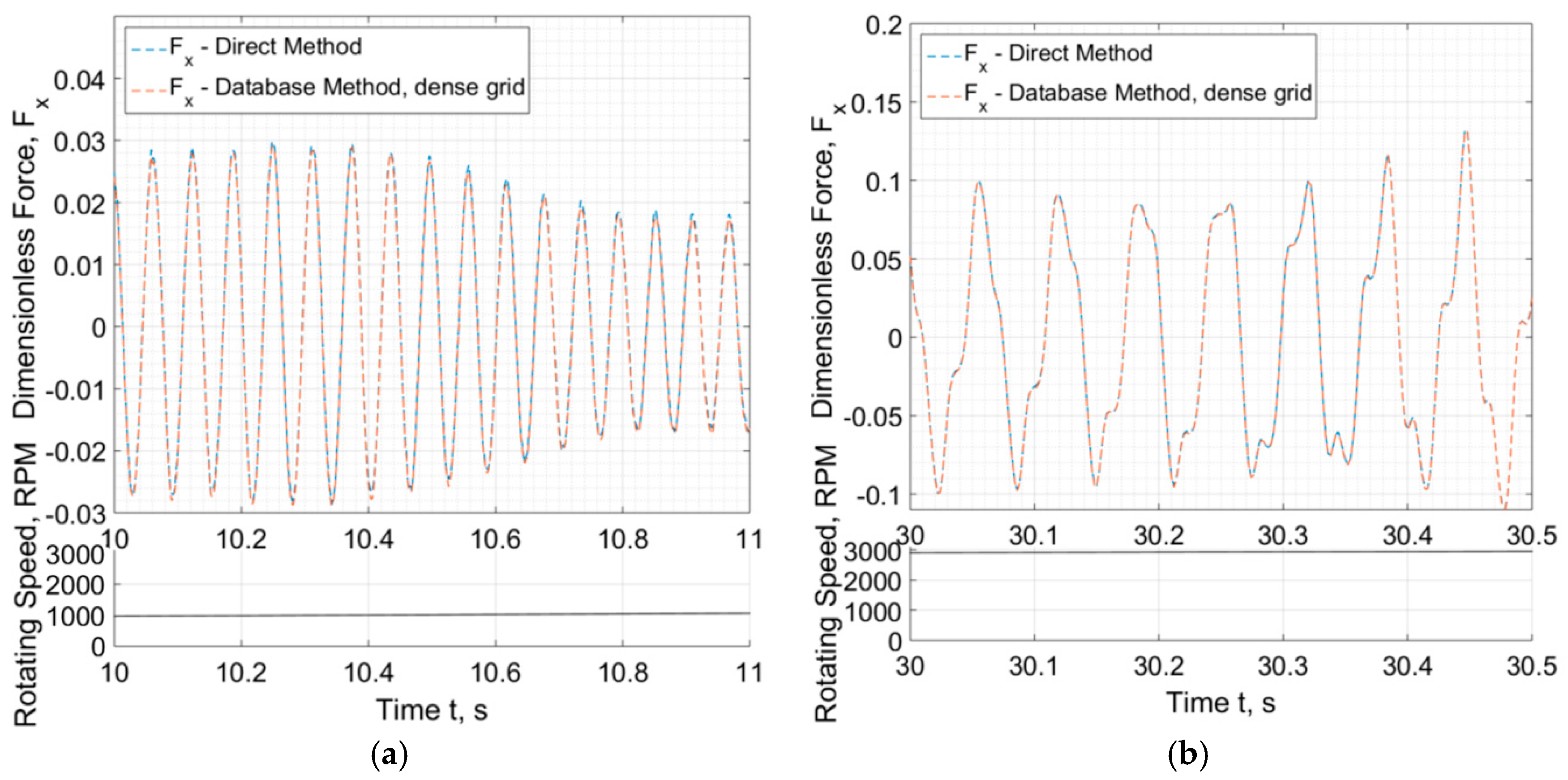
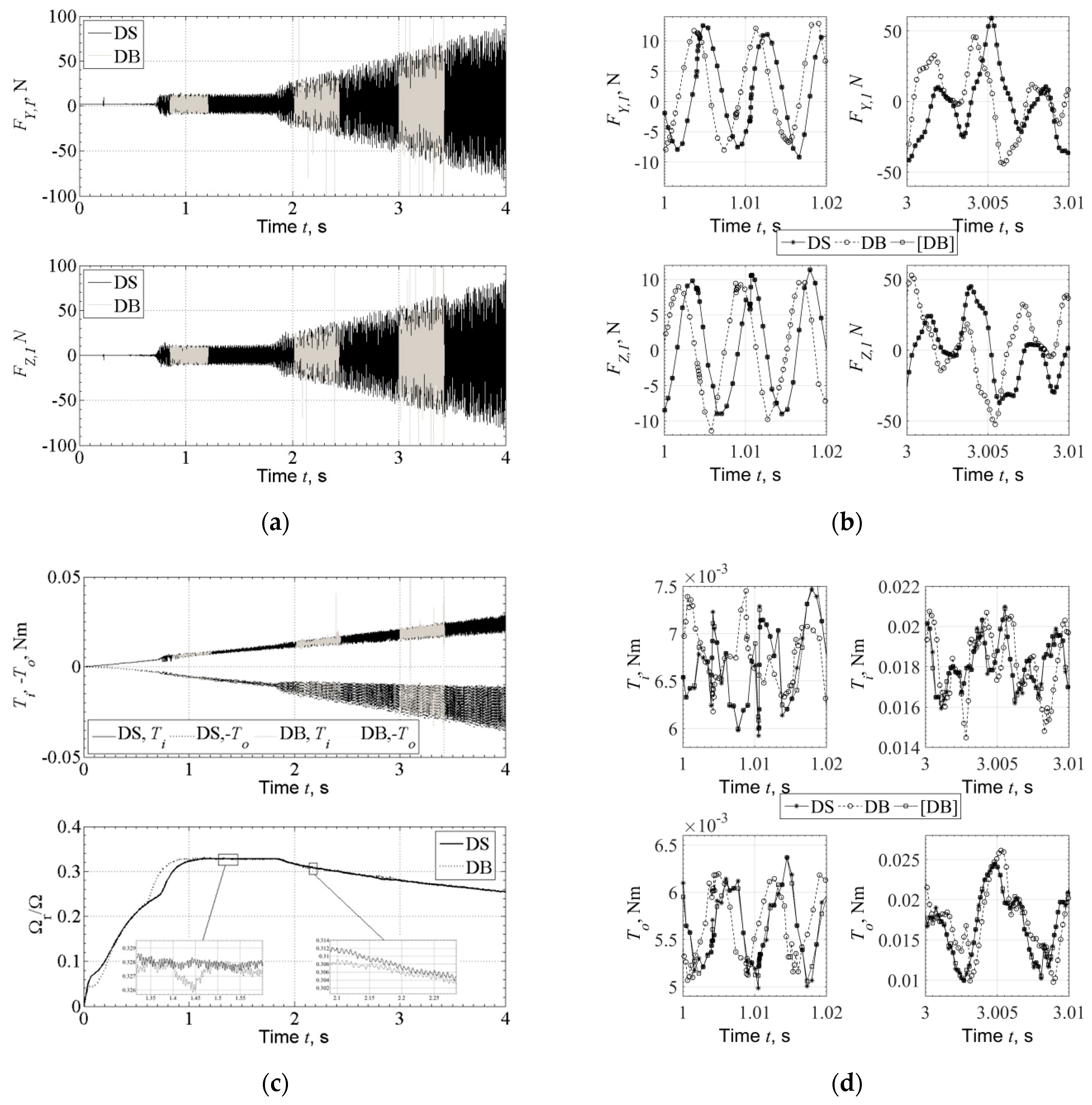
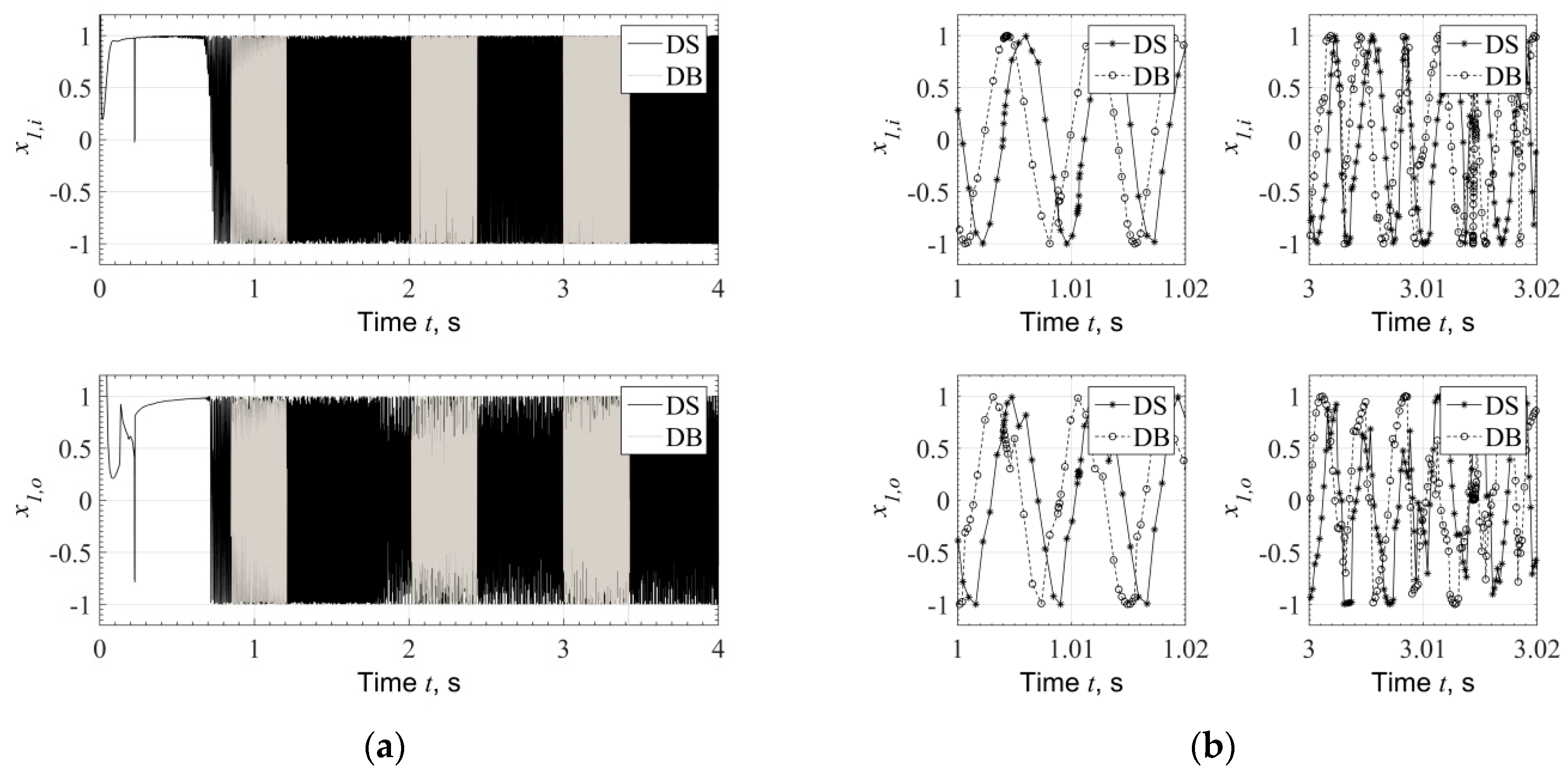
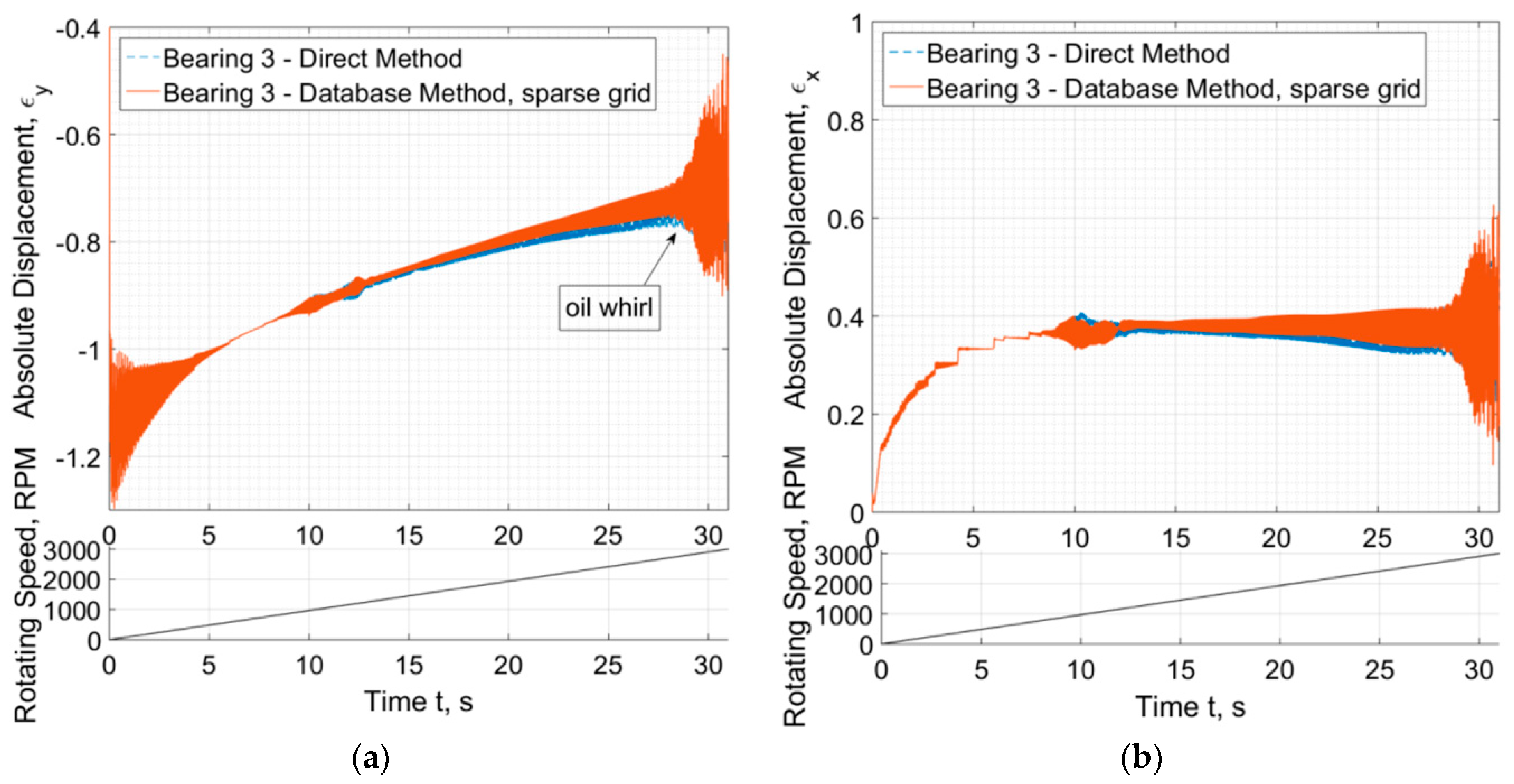
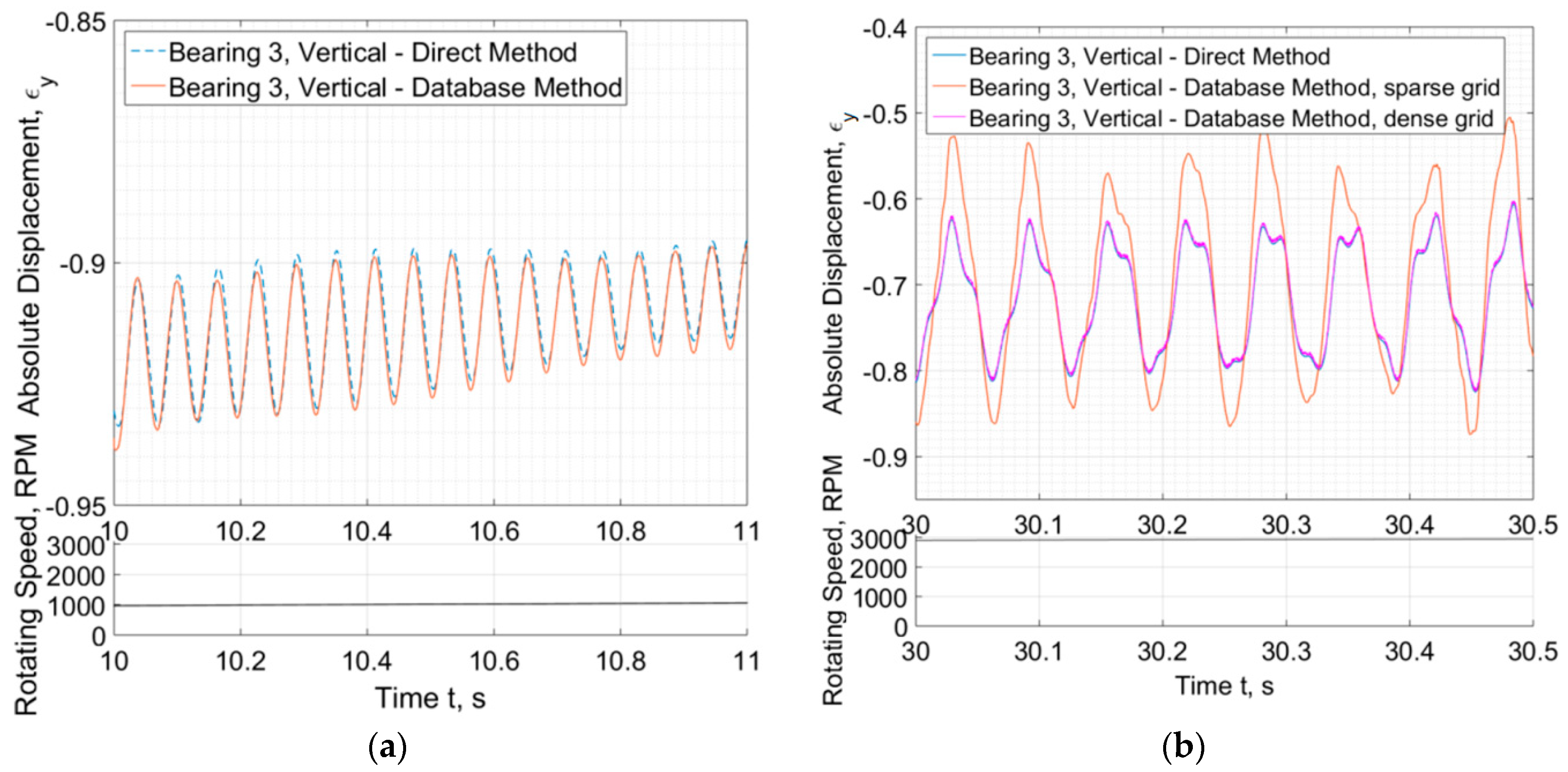
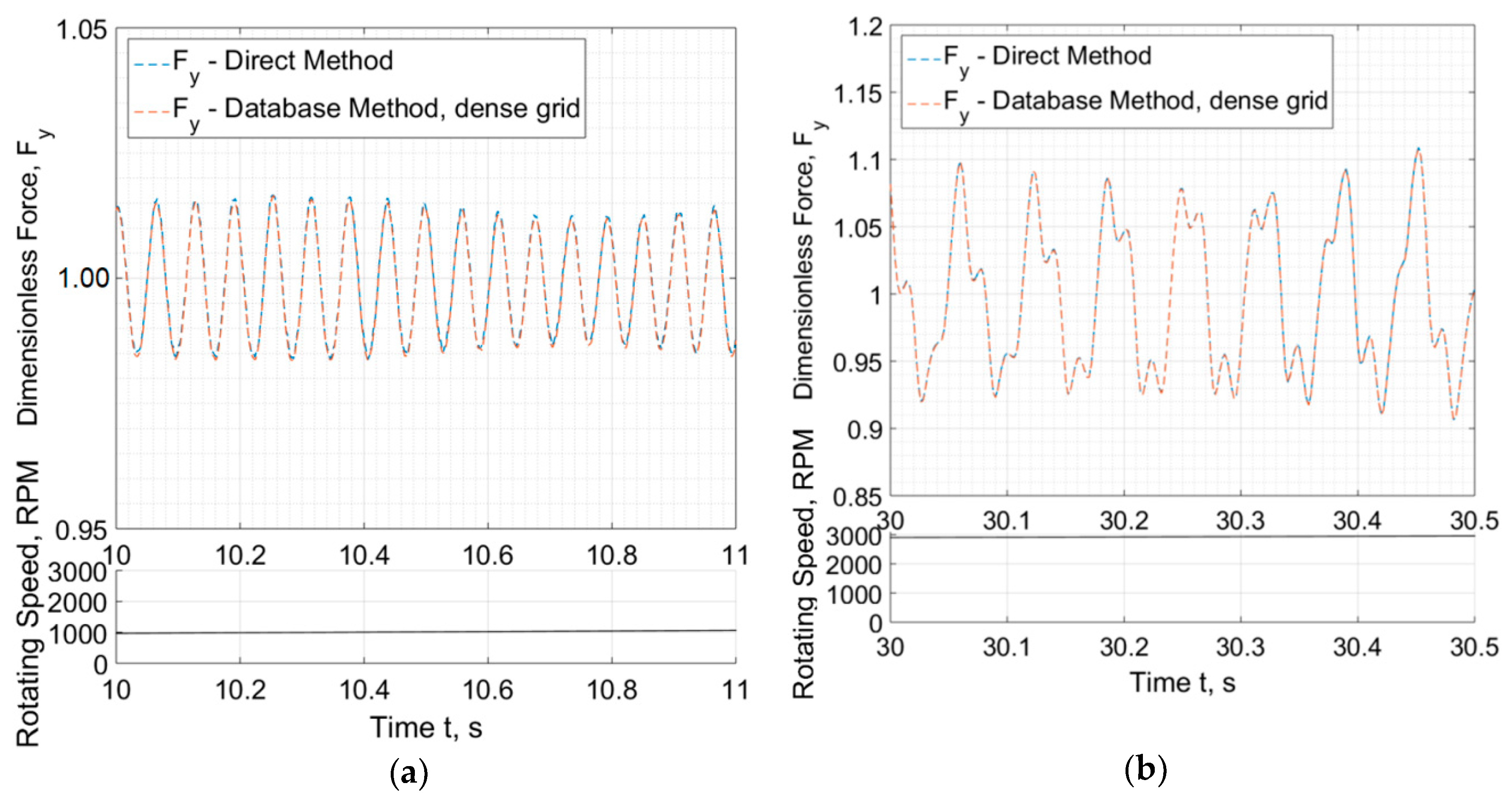
3.1. Application in a High-Speed System of Automotive Turbocharger
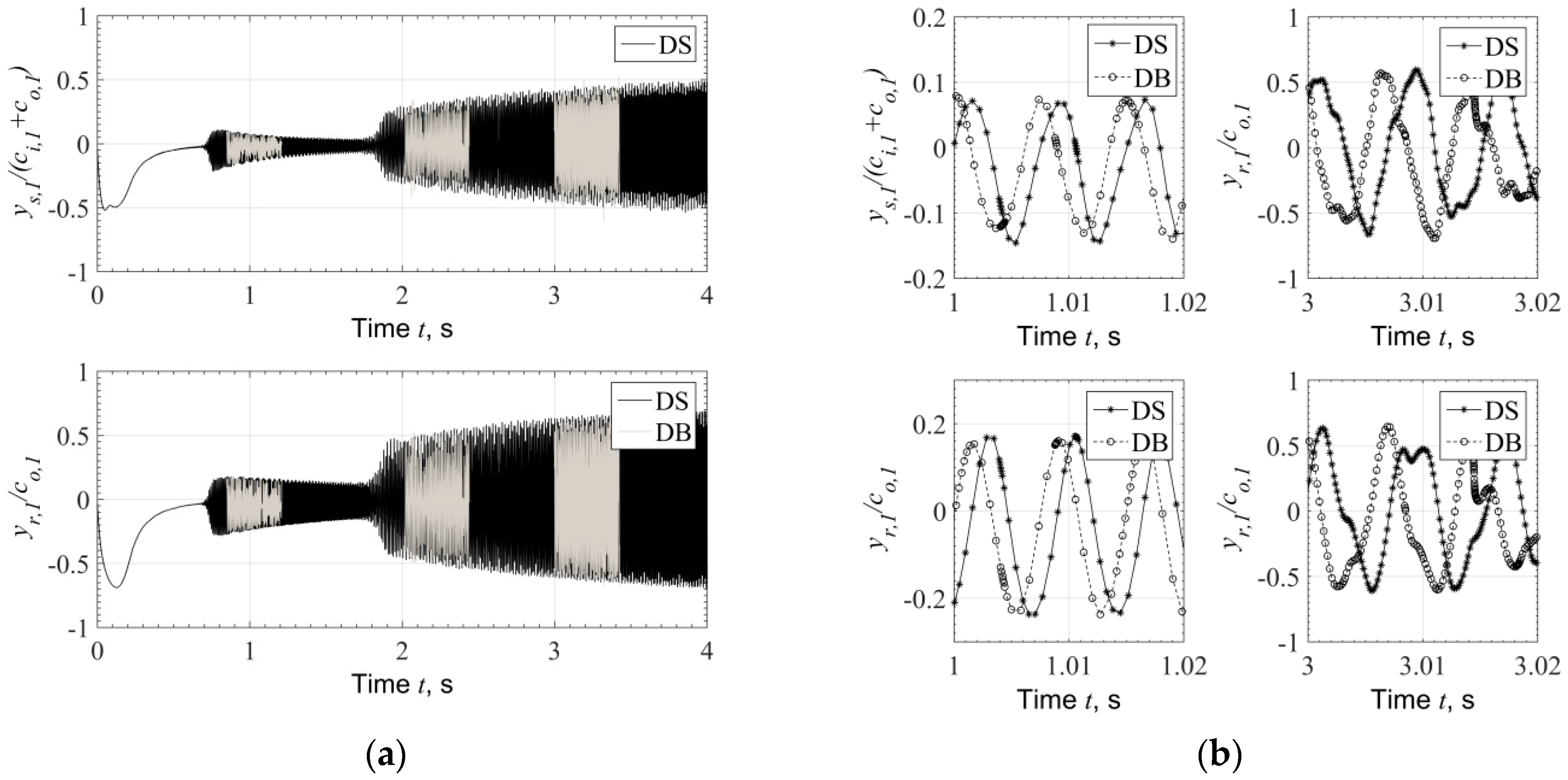
- Bearing forces are called from the Ordinary Differential Equation solver (ODE solver) and provided by the database which has been constructed as described in previous sections;
- Bearing forces are called from the ODE solver and they are evaluated with the direct solution of the Reynolds equation at every discrete time during run-up, using Finite Difference Method.
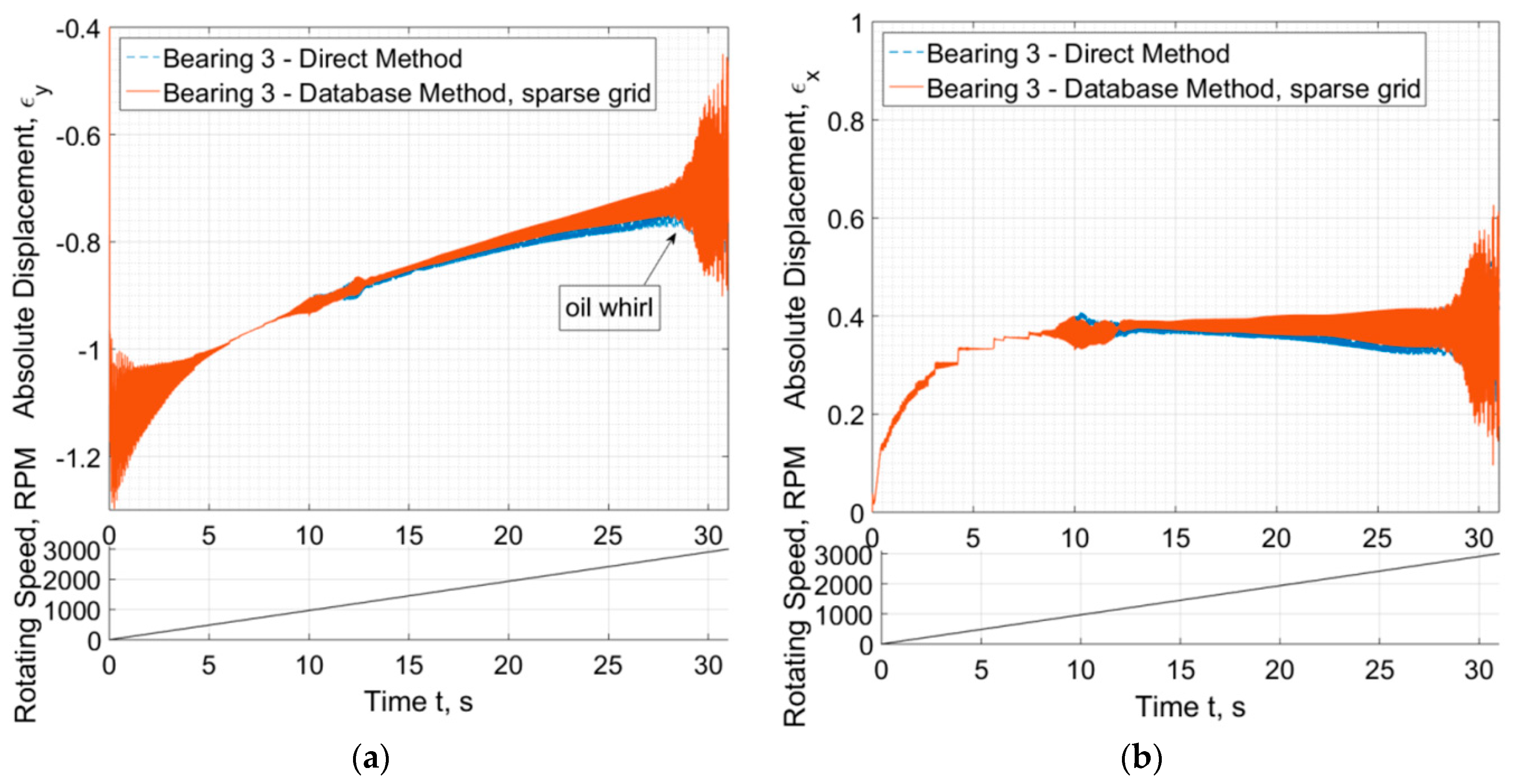
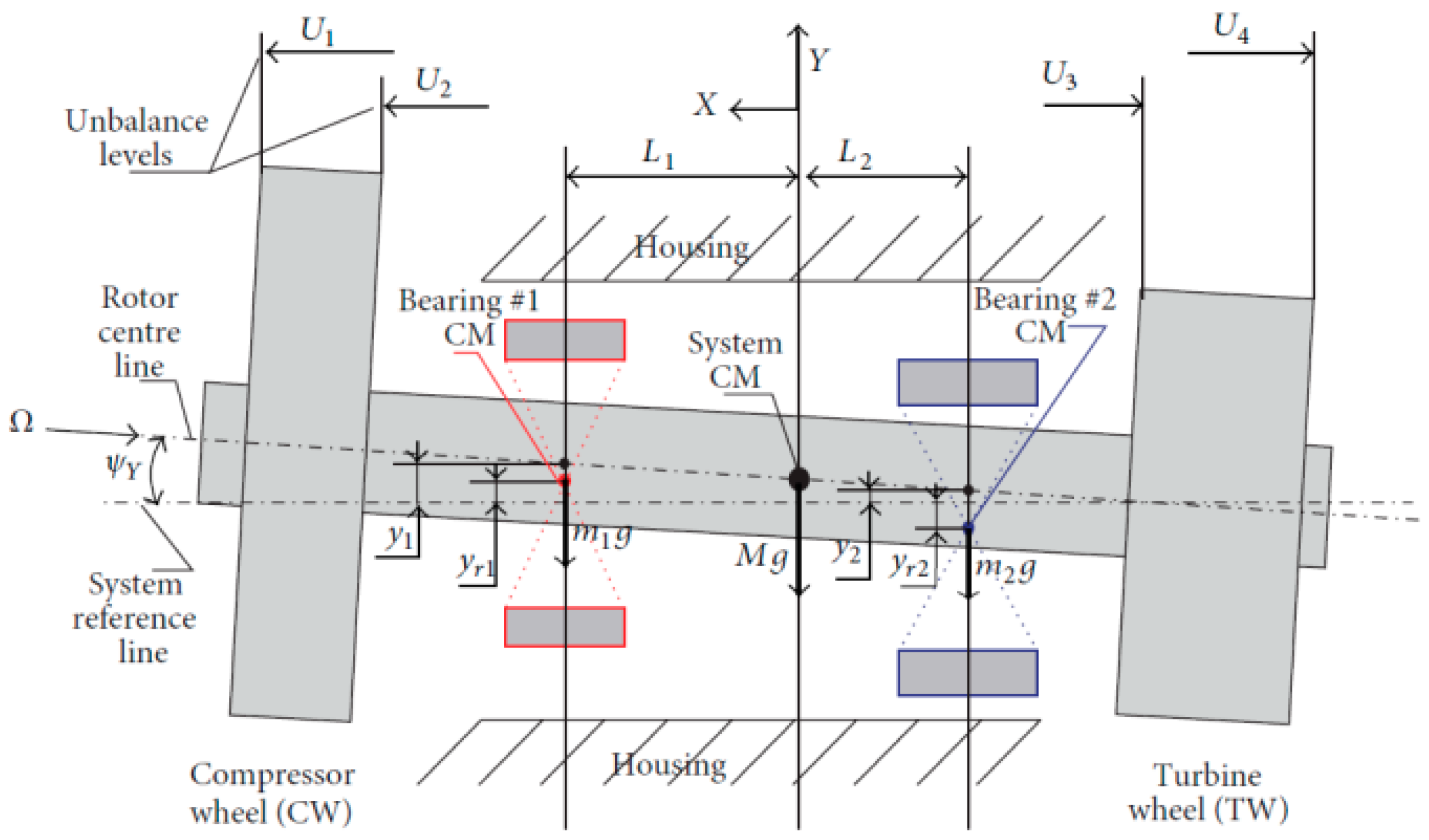
3.2. Application in a Medium-Speed System of Turbine-Generator Shaft-Train
4. Conclusions
- The method renders severe time reduction in transient nonlinear response calculation of large and small scale systems of high and medium speed and enables nonlinear rotordynamics in standard design procedures (fast design iteration);
- The method enables the implementation of accurate bearing models (e.g., THD, CFD) of complex bearing geometries in rotordynamic algorithms without any time cost (regardless the complexity of bearing performance model);
- The rotordynamic predictions comparing Database Method and Direct Solution are in a very good agreement, if not identical.
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| Hellenic Letters | |||
| : | relative eccentricity | : | starting angle of the fluid film |
| : | inner relative eccentricity | : | ending angle of the fluid film |
| : | outer relative eccentricity | : | rotating angle of the ring 1 |
| : | horizontal relative eccentricity | : | rotating angle of the ring 2 |
| : | vertical relative eccentricity | : | rotating speed of the ring 1 |
| : | horizontal inner relative eccentricity | : | rotating speed of the ring 2 |
| : | vertical inner relative eccentricity | : | rotational acceleration of the ring 1 |
| : | horizontal outer relative eccentricity | : | rotational acceleration of the ring 2 |
| : | vertical outer relative eccentricity | : | journal attitude angle rate of change |
| : | rate of change of | : | dimensionless rate of change of |
| : | rate of change of | : | dimensionless rate of change of |
| : | rate of change of | : | dimensionless rate of change of |
| : | rate of change of | : | dimensionless |
| : | : | dimensionless rate of change of | |
| : | : | dimensionless rate of change of | |
| : | : | vertical tilting angle of the rigid rotor | |
| : | : | horiz. tilting angle of the rigid rotor | |
| : | Ω: | rotating speed of the shaft | |
| : | : | rotating accel. of the shaft | |
| μ: | dynamic viscosity of lubricant | : | rotating speed of the ring |
| : | dynamic viscosity of the inner film | : | rotating speed of the ring 1 |
| : | dynamic viscosity of the outer film | : | rotating speed of the ring 2 |
| : | circumferential coordinate angle | : | rotating accel. of the ring 1 |
| : | rotating accel. of the ring 2 | ||
| Latin Letters | |||
| : | bearing clearance | : | inner fluid film force, vertical |
| : | inner bearing clearance | : | outer fluid film force, vertical |
| : | outer bearing clearance | : | inner fluid film force, Bearing 1, vert. |
| : | pad clearance | : | inner fluid film force, Bearing 2, vert. |
| : | damping coef. in pedestal (horiz.) | : | inner fluid film force, horizontal |
| : | damping coef. in pedestal (vert.) | : | outer fluid film force, horizontal |
| D: | diameter of shaft | : | inner fluid film force, Bearing 1, horiz. |
| : | absolute eccentricity (of journal) | : | inner fluid film force, Bearing 2, horiz. |
| : | inner absolute eccentricity (of journal) | : | gravitational force at node |
| : | outer absolute eccentricity (of ring) | : | unbalance forces, vertical |
| : | field matrix | : | unbalance forces, horizontal |
| : | gravity forces loading bearing 1 | : | nonlinear bearing force, horizontal |
| : | gravity forces loading bearing 2 | : | unbalance forces, horizontal |
| : | unbalance forces, vertical | : | lumped pedestal mass, horiz. |
| : | nonlinear bearing force, vertical | : | lumped pedestal mass, vert. |
| : | dimensionless bearing force, horiz. | : | pressure intervals (axially) |
| : | dimensionless bearing force, horiz. | : | pressure intervals (circumf.) |
| : | dimensionless bearing force, horiz. | : | absolute pressure |
| : | dimensionless bearing force, vert. | : | point matrix |
| : | dimensionless bearing force, vert. | : | dimensionless pressure |
| : | dimensionless bearing force, vert. | : | inner dimensionless pressure |
| : | gravity acceleration | : | outer dimensionless pressure |
| h: | fluid film thickness | : | |
| : | inner fluid film thickness | : | divisor of dimen/less Reynolds |
| : | outer fluid film thickness | : | journal radius |
| : | dimensionless fluid film thickness | : | bearing lobe radius |
| : | radius of shaft | ||
| : | dimensionless fluid film thick., inner | : | time |
| : | dimensionless fluid film thick., out. | : | torque of the inner film |
| : | mass moment of inertia of ring 1 | : | transfer matrix |
| : | mass moment of inertia of ring 2 | : | unbalance magnitude |
| : | rotor mass moment of inertia, polar | : | torque of the outer film |
| : | rotor mass moment of inertia, diametric | : | distance of unbalance plane distance |
| : | lumped mass moment of inertia, diam. | : | horizontal displacement |
| : | lumped mass moment of inertia, polar | : | pedestal displacement, horiz. |
| : | bearing ratio, 2/ | : | journal absolute velocity, horiz. |
| : | Stiffness coefficient of pedestal, horiz. | : | journal displacement, horiz. |
| : | Stiffness coefficient of pedestal, vert. | : | pedestal displacement, vert. |
| L: | bearing length in axial direction | : | ring displacement, vert. |
| : | bearing length in axial direction | : | journal displacement, vert. |
| : | bearing length in the inner film, axially direction | : | journal absolute velocity, vert. |
| : | bearing length in the outer film, axially direction | : | ring absolute velocity, vert. |
| : | length of bearing 1 | : | journal absolute velocity, vert. |
| : | length of bearing 2 | : | axial coordinate in bearing |
| : | bearing preload (geometric) | : | ring displacement, horiz. |
| : | mass of ring 1 | : | journal displacement, horiz. |
| : | mass of ring 2 | : | ring absolute velocity, horiz |
| : | total mass of rotor | : | journal absolute velocity, horiz |
| : | lumped mass at a node | : | Dimensionless axial coordinate |
Appendix A. Simplified Model of an Automotive Turbocharger
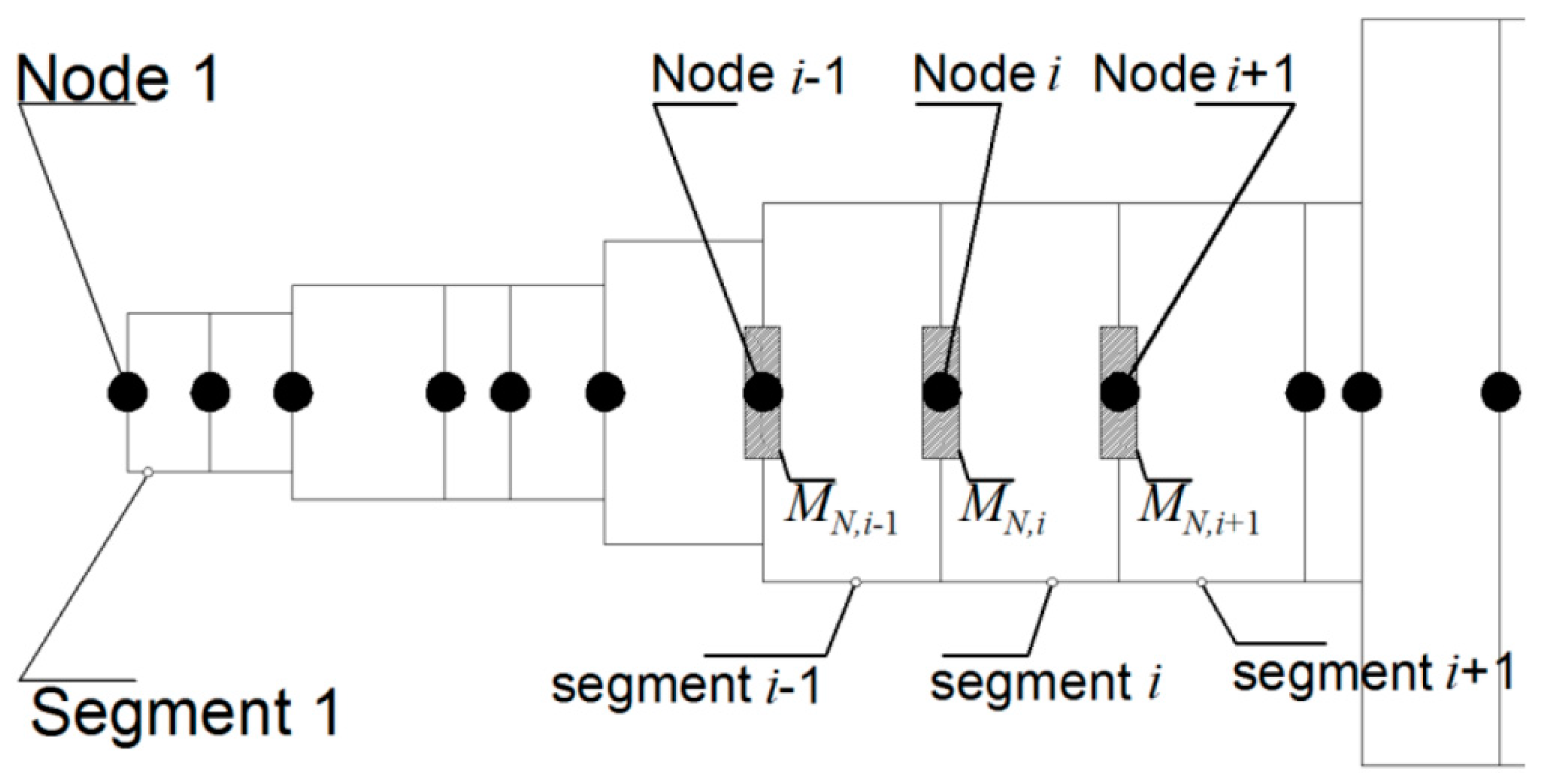
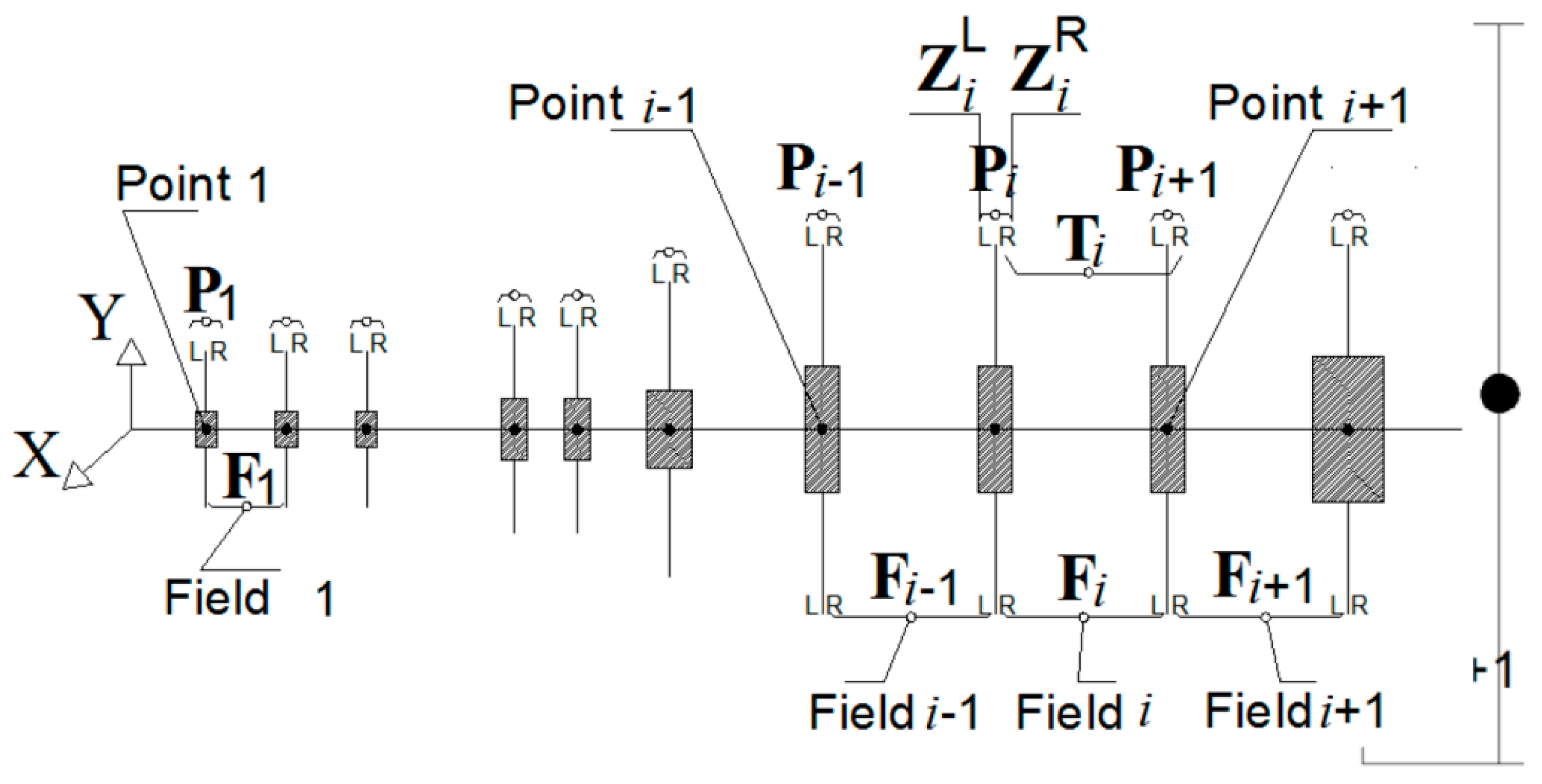
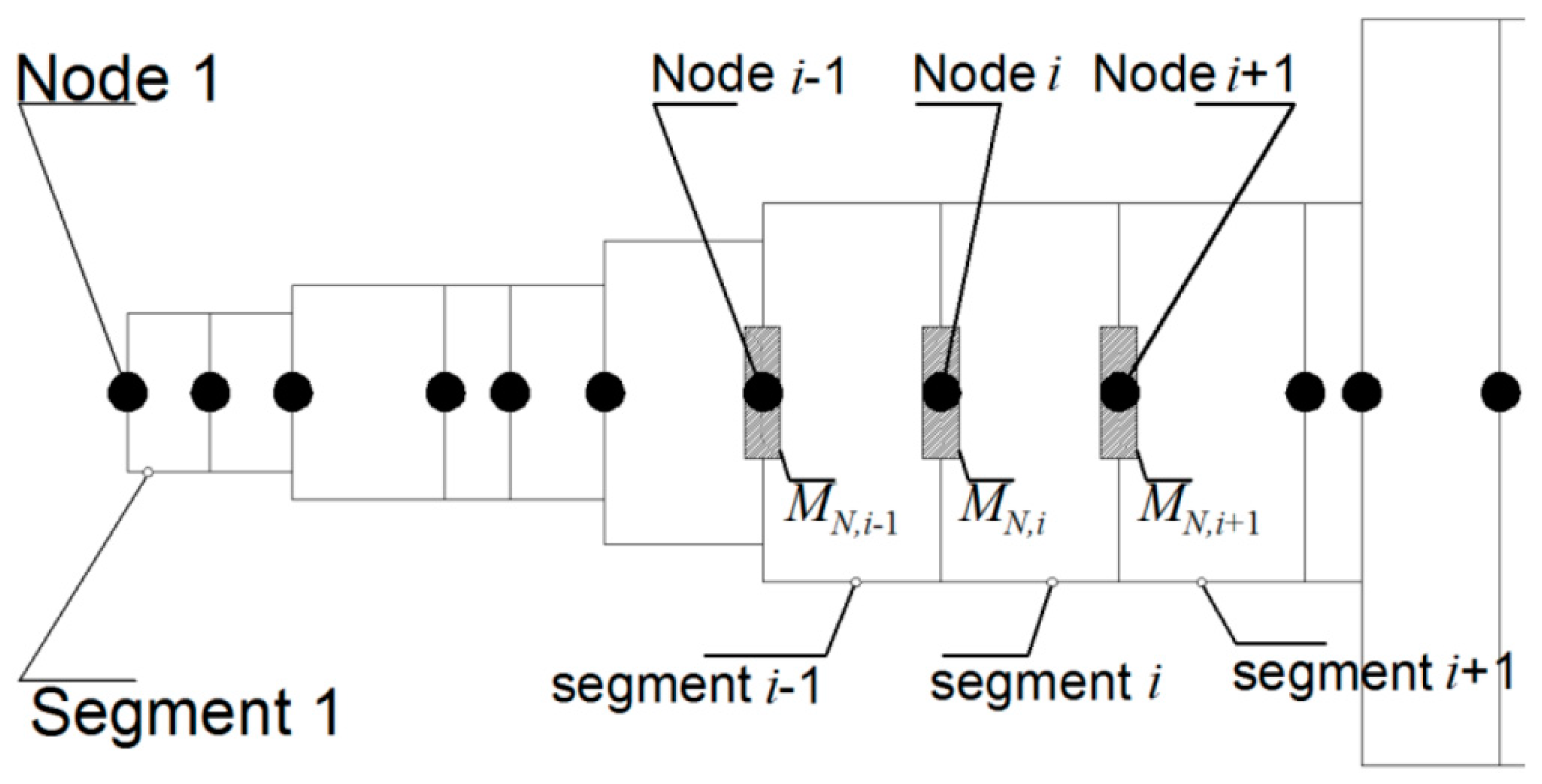
Appendix B. Modelling of Turbine-Generator Shaft Trains Using the Transient Transfer Matrix Method
References
- Sfyris, D.; Chasalevris, A. An exact analytical solution of the Reynolds equation for the finite journal bearing lubrication. Tribol. Int. 2012, 55, 46–58. [Google Scholar] [CrossRef]
- Chasalevris, A.; Sfyris, D. Evaluation of the finite journal bearing characteristics, using the exact analytical solution of the Reynolds equation. Tribol. Int. 2013, 57, 216–234. [Google Scholar] [CrossRef]
- Wang, W.; Zhang, Z. Nonlinear oil film force database. J. Shangai Univ. Technol. 1993, 14, 299–305. [Google Scholar]
- Wen, W.; Zhang, Z.; Chen, X. Application of the non-stationary oil film force database. J. Shanghai Univ. (Engl. Ed.) 2001, 5, 230–233. [Google Scholar]
- Chen, Z.; Jiao, H.; Xia, S.; Huang, W.; Zhang, Z. An efficient calculation method of nonlinear fluid film forces in journal bearings. Trib. Trans. 2002, 45, 324–329. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, Z.; Kang, W.; Yan, J. Approximate analytical model for the fluid film force of finite length plain journal bearing. Proc. IMechE Part C J. Mech. Eng. Sci. 2011, 226, 1345–1355. [Google Scholar] [CrossRef]
- Zhang, C.; Men, R.; He, H.; Chen, W. Effects of circumferential and axial grooves on the nonlinear oscillations of the full floating ring bearing supported turbocharger rotor. Proc. Inst. Mech. Eng. Part J J. Eng. Tribol. 2019, 233, 741–757. [Google Scholar] [CrossRef]
- Hei, D.; Lu, Y.; Zhang, Y.; Lu, Z.; Gupta, P.; Mueller, N. Nonlinear dynamic behaviors of a rod fastening rotor supported by fixed-tilting pad journal bearings. Chaos Soltions Fractals 2014, 69, 129–150. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, X.; Dang, C.; Hei, D.; Wang, X.; Lü, Y. A semianalytical approach to nonlinear fluid film forces of a hydrodynamic journal bearing with two axial grooves. Appl. Math. Model. 2019, 65, 318–332. [Google Scholar] [CrossRef]
- Booker, J. Dynamically loaded journal bearings: Mobility methods of solution. J. Basic Eng. 1965, 87, 537–546. [Google Scholar] [CrossRef]
- Booker, J. Dynamically loaded journal bearings: Numerical application of the mobility method. J. Lubr. Technol. 1971, 92, 168–176 and 351. [Google Scholar] [CrossRef]
- Childs, D.; Moes, H.; van Leeuwen, H. Journal bearing impedance descriptions for rotordynamic applications. J. Lubr. Technol. 1977, 99, 198–219. [Google Scholar] [CrossRef]
- Hori, Y. Hydrodynamic Lubrication; Springer: Tokyo, Japan, 2006. [Google Scholar]
- Szeri, A. Fluid Film Lubrication, 2nd ed.; Cambridge University Press: New York, NY, USA, 2011. [Google Scholar]
- Childs, D. Turbomachinery Rotordynamics; Wiley-Intersciences: New York, NY, USA, 1993. [Google Scholar]
- Chasalevris, A. Finite length floating bearings: Operational characteristic using analytical mathods. Tribol. Int. 2016, 94, 571–590. [Google Scholar] [CrossRef]
- Chasalevris, A. An investigation on the dynamics of high-speed systems using nonlinear analytical floating ring bearing models. Int. J. Rotat. Mach. 2016, 2016, 7817134. [Google Scholar] [CrossRef]
- Chasalevris, A.; Guignier, G. Alignment and rotordynamic optimization of turbine shaft trains using adjustable bearings in real-time operation. Proc. IMechE Part C J. Mech. Eng. Sci. 2019, 233, 2379–2399. [Google Scholar] [CrossRef]
- Liew, A.; Feng, N.; Hahn, E. On using the transfer matrix formulation for transient analysis of nonlinear rotor bearing systems. Int. J. Rot Mach. 2004, 10, 425–431. [Google Scholar] [CrossRef]
- Kreysig, E. Advanced Engineering Mathematics, 3rd ed.; John Wiley & Sons: Hoboken, NJ, USA, 1972. [Google Scholar]
- San Andres, L.; Rivadeneira, J.C.; Gjika, K.; Groves, C.; LaRue, G. Rotordynamics of small turbochargers supported on floating ring bearings—highlights in bearing analysis and experimental validation. ASME J. Tribol. 2007, 129, 391–397. [Google Scholar] [CrossRef]
- San Andrés, L.; Ryu, K.; Diemer, P. Prediction of gas thrust foil bearing performance for oil-free automotive turbochargers. J. Eng. Gas Turbines Power 2015, 137, 1–10. [Google Scholar] [CrossRef]
- San Andrés, L.; Kerth, J. Thermal effects on the performance of floating ring bearings for turbochargers. Proc. Inst. Mech. Eng. Part J J. Eng. Tribol. 2004, 218, 437–450. [Google Scholar] [CrossRef]
- Schweizer, B.; Sievert, B. Nonlinear oscillations of automotive turbocharger turbines. J. Sound Vib. 2009, 321, 955–975. [Google Scholar] [CrossRef]
- Schweizer, B. Oil whirl, oil whip and whirl/whip synchronization occurring in rotor systems with full-floating ring bearings. Nonlinear Dyn. 2009, 57, 509–532. [Google Scholar] [CrossRef]
- Schweizer, B. Total instability of turbocharger rotors—Physical explanation of the dynamic failure of rotors with full-floating ring bearings. J. Sound Vib. 2009, 328, 156–190. [Google Scholar] [CrossRef]
- Schweizer, B. Dynamics and stability of turbocharger rotors. Arch. Appl. Mech. 2010, 80, 1017–1043. [Google Scholar] [CrossRef]
- Chatzisavvas, I.; Boyaci, A.; Koutsovasilis, P.; Schweizer, B. Influence of hydrodynamic thrust bearings on the nonlinear oscillations of high-speed rotors. J. Sound Vib. 2016, 380, 224–241. [Google Scholar] [CrossRef]
- Koutsovasilis, P. Mode shape degeneration in linear rotor dynamics for turbocharger systems. Arch. Appl. Mech. 2017, 87, 575–592. [Google Scholar] [CrossRef]
- Chatzisavvas, I.; Nowald, G.; Schweizer, B.; Koutsovasilis, P. Experimental and numerical investigations of turbocharger rotors on full-floating ring bearings with circumferential oil-groove. In Proceedings of the ASME Turbo Expo 2017, Charlotte, NC, USA, 26–30 June 2017. [Google Scholar]
- Koutsovasilis, P. Automotive turbocharger rotordynamics: Interaction of thrust and radial bearings in shaft motion simulation. J. Sound Vib. 2019, 455, 413–429. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bearing Sub-Routine | ODEs Integration | Total Time | |||||
|---|---|---|---|---|---|---|---|
| Calls | Total Time | Time/Call | Calls | Total Time | Time/Call | (Run up) | |
| Direct Method | ~2.45 Mio | ~207 min | ~5.06 ms | ~0.61 Mio | ~6.1 min | ~0.62 ms | ~213 min |
| Database Method | ~2.37 Mio | ~1.48 min | ~0.037 ms | ~0.59 Mio | ~6.5 min | ~0.66 ms | ~8 min |
| Bearing Sub-Routine | ODEs Integration | Total Time | |||||
|---|---|---|---|---|---|---|---|
| Calls | Total Time | Time/Call | Calls | Total Time | Time/Call | (Run Up) | |
| Direct Method | ~38 Mio | ~53 h | ~5.06 ms | ~8 Mio | ~27 h | ~300 ms | ~80 h |
| Database Method | ~40 Mio | ~0.4 h | ~0.037 ms | ~8 Mio | ~28 h | ~300 ms | ~28 h |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chasalevris, A.; Louis, J.-C. Evaluation of Transient Response of Turbochargers and Turbines Using Database Method for the Nonlinear Forces of Journal Bearings. Lubricants 2019, 7, 78. https://doi.org/10.3390/lubricants7090078
Chasalevris A, Louis J-C. Evaluation of Transient Response of Turbochargers and Turbines Using Database Method for the Nonlinear Forces of Journal Bearings. Lubricants. 2019; 7(9):78. https://doi.org/10.3390/lubricants7090078
Chicago/Turabian StyleChasalevris, Athanasios, and Jean-Charles Louis. 2019. "Evaluation of Transient Response of Turbochargers and Turbines Using Database Method for the Nonlinear Forces of Journal Bearings" Lubricants 7, no. 9: 78. https://doi.org/10.3390/lubricants7090078
APA StyleChasalevris, A., & Louis, J.-C. (2019). Evaluation of Transient Response of Turbochargers and Turbines Using Database Method for the Nonlinear Forces of Journal Bearings. Lubricants, 7(9), 78. https://doi.org/10.3390/lubricants7090078